JP2007193538A - 自走式移動体 - Google Patents
自走式移動体 Download PDFInfo
- Publication number
- JP2007193538A JP2007193538A JP2006010480A JP2006010480A JP2007193538A JP 2007193538 A JP2007193538 A JP 2007193538A JP 2006010480 A JP2006010480 A JP 2006010480A JP 2006010480 A JP2006010480 A JP 2006010480A JP 2007193538 A JP2007193538 A JP 2007193538A
- Authority
- JP
- Japan
- Prior art keywords
- obstacle
- obstacle detection
- self
- detection unit
- light emitting
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
- 238000001514 detection method Methods 0.000 claims abstract description 171
- 239000000428 dust Substances 0.000 description 14
- 238000004140 cleaning Methods 0.000 description 3
- 230000005540 biological transmission Effects 0.000 description 2
- 238000009408 flooring Methods 0.000 description 2
- 238000009434 installation Methods 0.000 description 2
- 238000000034 method Methods 0.000 description 2
- 238000004148 unit process Methods 0.000 description 2
- 238000004519 manufacturing process Methods 0.000 description 1
- XLYOFNOQVPJJNP-UHFFFAOYSA-N water Substances O XLYOFNOQVPJJNP-UHFFFAOYSA-N 0.000 description 1
Images




Classifications
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course or altitude of land, water, air, or space vehicles, e.g. automatic pilot
- G05D1/02—Control of position or course in two dimensions
- G05D1/021—Control of position or course in two dimensions specially adapted to land vehicles
- G05D1/0231—Control of position or course in two dimensions specially adapted to land vehicles using optical position detecting means
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course or altitude of land, water, air, or space vehicles, e.g. automatic pilot
- G05D1/02—Control of position or course in two dimensions
- G05D1/021—Control of position or course in two dimensions specially adapted to land vehicles
- G05D1/0231—Control of position or course in two dimensions specially adapted to land vehicles using optical position detecting means
- G05D1/0246—Control of position or course in two dimensions specially adapted to land vehicles using optical position detecting means using a video camera in combination with image processing means
Abstract
【課題】
走行空間内に存在する障害物を確実に認識し、障害物に接触あるいは衝突することなく安全に回避する自走式移動体を提供する。
【解決手段】
障害物検出部50は、複数の発光素子51aとレンズ体51bを備えた発光部51と、受光素子52bとレンズ体51bを備えた受光部52とから構成される。複数の発光素子51aは、一方向に配列される。この障害物検出部50は、掃除機本体10の前面から左右側方にかけて配置される。発光素子51aの配列方向に検出範囲が広がり、掃除機本体10の進行方向における障害物をくまなく検出する。
【選択図】図5
走行空間内に存在する障害物を確実に認識し、障害物に接触あるいは衝突することなく安全に回避する自走式移動体を提供する。
【解決手段】
障害物検出部50は、複数の発光素子51aとレンズ体51bを備えた発光部51と、受光素子52bとレンズ体51bを備えた受光部52とから構成される。複数の発光素子51aは、一方向に配列される。この障害物検出部50は、掃除機本体10の前面から左右側方にかけて配置される。発光素子51aの配列方向に検出範囲が広がり、掃除機本体10の進行方向における障害物をくまなく検出する。
【選択図】図5
Description
本発明は、自律走行して部屋の清掃作業を行なう自走式電気掃除機や、部屋の画像を撮影して携帯電話等に送信する留守番ロボットをはじめとする自走式移動体に関する。
一般家庭、オフィス、あるいは、公共施設等において、掃除やセキュリティー等の技術分野を中心に自律走行する自走式移動体が出現し、各種作業が自動化されつつある。この自走式移動体がより一層普及するためには、壁面や家具等を傷つけずに安全に走行する必要がある。そのためには、自走式移動体自体で走行空間内の情報を十分に収集する必要がある。
走行空間内の情報を収集する方法としては、各種障害物検出部を備えて障害物を検出する方法が一般的である。例えば、特許文献1では、障害物の位置を検出する非接触センサ(超音波センサ、赤外線センサ等)と、障害物に接触したことを検出する接触センサ(リミットスイッチ、近接スイッチ、感圧スイッチ等)とを備え、それら障害物検出部によって障害物を検出する自走式移動体が開示されている。
また、特許文献2では、本体の底部に床面判別手段(CCD素子等)と筋目検出手段(赤外線センサ等)とを備え、床面判別手段が畳なのかフローリングなのかを検出し、筋目検出手段が畳またはフローリングの筋目を検出し、検出した筋目に沿って吸込口を移動させて効率的に掃除をする自走式移動体が開示されている。
さらに、特許文献3では、検出範囲の広い超音波センサや障害物の正確な位置を検出することができる赤外線センサ等、数種類の障害物検出部を備え、それら障害物検出部が鉛直方向に回動または昇降することで検出範囲を広げ、障害物の大きさや距離等を検出する自走式移動体が開示されている。
特開平5−46239号公報
特許第3140900号公報
特許第3356275号公報
このように、従来の自走式移動体は、空間内に存在する障害物を検出するために、非接触センサおよび接触センサを備えている。また、段差や床面の判別をするために床面判別手段(CCD素子等)や筋目検出手段(反射型赤外線センサ)を備えている。
ところで、超音波センサは、超音波送信素子と超音波受信素子とが対をなし、超音波送信素子から送信された超音波が障害物に反射されて超音波受信素子に戻るまでの時間から、障害物の位置を検出する。このような超音波センサは、障害物が平坦である場合には正確な距離が計測できる。しかし、障害物に凹凸がある場合や曲面の場合は、超音波が乱反射するため障害物の正確な位置を検出できない。
また、赤外線センサは発光素子と受光素子とを備え、発光素子には凸レンズ、受光素子には凹レンズが装着されている。発光素子から送信された光は凸レンズを通して障害物に到達し、反射した光が凹レンズを通して受光素子の素子面に入り、受光素子の素子面に入射した位置から障害物の位置を検出している。このような発光素子と受光素子とが対になった赤外線センサは、障害物に凹凸がある場合や曲面の場合にも正確な距離測定ができる。しかし、発光素子が1つしか備えられていないので、超音波センサに比べて視野角が狭くなり、検出範囲が水平方向で5°、垂直方向で5°しか得られない。そのため、赤外線センサを多数装着しないと検出範囲に死角ができる。
また、筋目検出手段である赤外線センサは、発光素子から発光した光が床面に対して垂直に反射するように備えられている。そのため、床面の一点のみを検出するので、前方の段差等の障害物を予め検出することができない。
接触センサは、超音波センサや赤外線センサによって検出できなかった障害物に対して、接触あるいは衝突することによって障害物を検出するが、その衝突によって障害物を倒したり傷つけたりする問題がある。
そこで、上記問題を鑑み、少ない障害物検出部でも走行空間内に存在する障害物を確実に認識し、障害物に接触あるいは衝突することなく安全に回避する自走式移動体の提供を目的とする。
上記目的を達成するために、本発明では、床面を走行するための走行手段を有する本体に、走行する空間内の障害物を検出する障害物検出部が設けられ、前記障害物検出部は、複数の発光素子と、少なくとも1つの受光素子とを備え、前記発光素子は、検出範囲を特定方向に広げるように一列に並べて配置したことを特徴とする。
発光素子を特定方向に配列することにより、発光素子1つの場合よりも検出範囲を広くすることができる。少ない障害物検出部であってもこれにより、より広範囲の障害物を検出することができる。また、受光素子を複数設けてもよい。受光素子を複数設けることにより、反射した光を的確に検出することができる。これにより、正確な障害物までの距離を計測することができる。さらに、発光素子が複数備えられているため、障害物が凹凸のある曲面であっても、検出する情報量が多く、障害物までの距離を確実に測定できる。
また、複数の障害物検出部が、自走式移動体の進行方向に向かって前方および左右側方を検出できるように円弧上に配置されたことを特徴とする。自走式掃除機の上面から見て円弧上に障害物検出部を配置することで、少ない障害物検出部によって進行方向に対して広範囲に障害物を検出することができる。
また、少なくとも1つの障害物検出部は、その検出範囲が他の障害物検出部の検出範囲と異なるように、向きを変えて配置されたことを特徴とする。例えば、発光素子を床面に対して垂直方向に一列に並べ、床面に対して垂直方向の検出範囲を広くした横置き障害物検出部と、発光素子を床面に対して水平方向に一列に並べ、床面に対して水平方向の検出範囲を広くした縦置き障害物検出部とを備える。
上記構成によると、障害物検出部の検出範囲が床面に対して水平方向だけでなく垂直方向にも広がる。低い位置にある障害物も検出することができる。さらに、横置き障害物検出部は、床面の段差や凹凸等を検出することができる。例えば、垂直方向に検出範囲を持つ障害物検出部を自走式移動体の前方で下方に向けて装着すれば、進行方向に存在する段差を検出することができる。
横置き障害物検出部と縦置き障害物検出部とを組み合わせるとき、横置き障害物検出部の検出範囲が縦置き障害物検出部の検出範囲よりも低くなるように、前記横置き障害物検出部の発光素子は低い位置に配置する。これにより、従来検出できなかった高さの低い障害物、例えば、敷居や床の間等の段差を検出することができ、自走式移動体は、段差を避けて走行することができる。
また、隣り合う障害物検出部が重なり合うように、各障害物検出部は、本体の前側に集中的に配置されたことを特徴とする。障害物検出部を配置する際、隣り合う障害物検出部の検出範囲が互いに重複するよう配置する。これにより、製造工程による障害物検出部の取り付けのばらつきや、障害物検出部内の発光素子の傾き等の個体差によって生じる検出範囲の誤差をカバーすることができる。したがって、障害物検出部の検出範囲には死角ができず、障害物を見逃すことなく検出することができる。
また、障害物検出部からの検出結果に基づいて走行手段を制御する制御部を備え、前記制御部は、前記障害物検出部からの信号に基づいて検出範囲毎に障害物の有無を判断する障害物判断手段を有することを特徴とする。
上記構成により、制御部は、各障害物検出部からの信号を処理する際、左側方、左側斜め前方、左側正面、右側正面、右側斜め前方、右側方等のように、方向毎に障害物の有無を判断する。すなわち、制御部は、全ての障害物検出部からの信号に基づいて総合的に判断するのではなく、各障害物検出部から信号が入力されるたびに判断する。そのため、制御部は、迅速な判断を行なえ、障害物を素早く認識できる。したがって、障害物検出部を増設しても、制御部は対応可能であり、広範囲の検出に役立つ。
また、床面を走行するための走行手段を有する本体に、複数の発光素子および少なくとも1つの受光素子を有する障害物検出部が複数設けられ、複数の発光素子は、床面に対して垂直方向に一列に並べられ、床面に対して垂直方向の検出範囲が広くされ、障害物検出部からの検出結果に基づいて走行手段を制御する制御部を備える。制御部は、障害物検出部からの信号により床面の段差の有無を判断する段差判断手段を有する。
上記構成により、自走式移動体の走行を妨害する段差を確実に検出できる。したがって、凹凸のある床面を走行するのに適した自走式移動体を実現できる。
以上のとおり、本発明は、特定方向に配列された複数の発光素子と、少なくとも1つ以上の受光素子を備えた障害物検出部を用いることで、発光素子が配列された方向の視野角、すなわち、検出範囲を広げることができる。この障害物検出部を備えることで、障害物の存在と障害物までの距離を確実に検出することができるので、壁面や家具を傷つけることなく走行空間内を安全に走行することができる。また、検出手段であるセンサを削減することができるので、自走式移動体をコンパクトにすることができ、省スペース、低コストを図れる。
〔第1実施形態〕
以下、本発明の実施形態として、部屋の壁、家具、ベッド等の障害物がある、周囲を囲まれた空間内を自立して移動する自走式電気掃除機を例に説明する。
以下、本発明の実施形態として、部屋の壁、家具、ベッド等の障害物がある、周囲を囲まれた空間内を自立して移動する自走式電気掃除機を例に説明する。
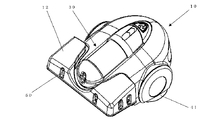
第1実施形態の自走式電気掃除機は、図1〜図3に示すように、電動送風機13を内装した掃除機本体10と、床面のゴミや埃等を吸引する吸込口体20とから構成される。吸込口体20は、掃除機本体10の前部側底面に配され、掃除機本体10に軸方向を垂直方向とする連結軸10aによって接続されると共に、連結軸10a周りに約30度の範囲で回転可能とされる。また、吸込口体20には、掃除機本体10側の屈曲自在な吸込ホース(図示せず)と連結され、電動送風機13の駆動により発生する吸引力で吸込口体20からゴミや埃等を掃除機本体側の集塵器30に吸引できるようになっている。
掃除機本体10は、小判型のケーシングの上面にカプセル状の集塵器30を収容するための凹部15が形成され、ケーシングの前部側には、障害物や壁面等に衝突した際の衝撃を緩和するバンパー12が取り付けられる。掃除機本体10の後部側には、電動送風機13が内装される。掃除機本体10の底面中央部分に電源を供給する電源バッテリ等の電源部16が備えられる。
また、掃除機本体10の側方には、掃除空間を移動するための走行手段としての駆動輪41が設けられる。この駆動輪41や電動送風機13の駆動を制御する制御基板等を備えた制御部(図示せず)は、凹部15の下側空間部に配設される。
さらに、バンパー12内には、周囲の障害物を検出する障害物検出部である障害物検出部50が設けられている。バンパー12は、衝撃を緩和するためにバネ(図示せず)によって掃除機本体10に対して移動自在とされる。
走行手段は、駆動モータ(図示せず)によって駆動される左右一対の車輪である駆動輪41と、吸込口体20の下面に設けられた補助輪(図示せず)とから構成される。駆動輪41は、左右が夫々独立して回転する。例えば、前進または後退のときは、両駆動輪41が同時に回転し、旋回のときは、夫々の駆動輪41が異なる方向に回転するか、一方の駆動輪41が停止し他方の駆動輪41が回転する。補助輪は、駆動輪41の動きに合わせて掃除機本体10がスムーズに走行できるように垂直軸周りに回転自在に支持されている。なお、走行手段は、特に駆動輪41に限られず、例えば、無限軌道や歩行装置等のように掃除機本体10が走行できるものであれば良い。
吸込口体20には、ゴミや埃等を吸引するメイン吸込口(図示せず)、前方吸込口(図示せず)および側方吸込口21cが形成される。メイン吸込口と前方吸込口とは、吸込口体20内部に形成された吸込経路(図示せず)と連通する開口とされ、側方吸込口21cは、ゴム等から構成されるL字形状のノズルとされる。
メイン吸込口は、吸込口体20の底面中央に設けられた凹部(図示せず)の壁面に貫通形成される。この凹部には、ゴミや埃等を床面から掻き取る回転ブラシ(図示せず)が回転自在に設けられ、回転ブラシの回転により、掻き上げられたゴミや埃等をメイン吸込口から吸引できるようになっている。
側方吸込口21cは、吸込口体20の左右に設けられており、底面中央に設けられた凹部に連通しており、側方吸込口21cから吸い込んだゴミや埃等をメイン吸込口から吸込経路に流入させるようにしている。
次に、障害物検出部50について図4および図5に基づいて説明する。障害物検出部50は、図4(a)に示すように、発光する発光部51と、反射された光を受光する受光部52と、これらを収納する箱状のケーシング53とから構成される。
発光部51は、図4(b)に示すように、複数の発光素子51aからなる。発光素子51aは、赤外線LEDであって、ケーシング53の幅方向に対して平行に配列される。この発光素子51aの前面には、発光素子51aから発した光が広範囲に広がるように、凸状のレンズ体51bが配置される。
受光部52は、図4(c)に示すように、フォトトランジスタやフォトダイオード等の受光素子52aからなる。この受光素子52bの前面には、障害物から反射した光が受光素子52aに集束するように、凹状のレンズ体52bが配置される。
ケーシング53の前面は、透光性を有し、受光素子52bからの光を透過する。発光部51と受光部52とは、ケーシング53内において、前方に向かって並んで配置される。
障害物検出部50は、図1に示すように、床面に対して発光素子51aが水平になるように取り付ける。詳しくは、掃除機本体10に対して、発光部51が上、受光部52が下の位置になるように、障害物検出部50は縦置きされる。掃除機本体10の前方部に3つ、左右側方部に夫々2つずつ備える。各障害物検出部50は、バンパー12に形成された窓に取り付けられる。これにより、各障害物検出部50による検出範囲は、進行方向に対して前方および左右方向となる。
障害物検出部50は、図1に示すように、床面に対して発光素子51aが水平になるように取り付ける。詳しくは、掃除機本体10に対して、発光部51が上、受光部52が下の位置になるように、障害物検出部50は縦置きされる。掃除機本体10の前方部に3つ、左右側方部に夫々2つずつ備える。各障害物検出部50は、バンパー12に形成された窓に取り付けられる。これにより、各障害物検出部50による検出範囲は、進行方向に対して前方および左右方向となる。
次に、制御部が障害物検出部50で検出した結果から駆動モータを制御するときの動作を説明する。
制御部は、各障害物検出部50を駆動制御する。すなわち、障害物検出部50の発光部51は、一定のタイミングで発光する。そして、各障害物検出部50において、発光タイミングはずれている。受光部52は、他の障害物検出部50から発光され、反射してきた光を受光することはない。
制御部は、いずれの障害物検出部50が動作しているのかを認識している。それで、制御部は、障害物検出部50の検出結果から障害物の位置を算出し、その位置に基づいて駆動モータを制御する。すなわち、制御部は、先ず、各障害物検出部50からの出力信号により障害物の有無を判断する。障害物があるとき、制御部は、障害物までの距離および方向を算出する。そして掃除機本体10の移動方向および移動速度を演算して、障害物を回避するように掃除機本体10の移動方向および移動速度を決定する。この決定に応じて、駆動モータに駆動信号が出力される。駆動モータが駆動制御され、掃除機本体10は障害物を避けながら走行する。
なお、制御部が障害物検出部50からの信号を処理する際、各障害物検出部50から時系列的に信号が出力される。そこで、制御部は、例えば、左側方、左側斜め前方、左側正面、右側正面、右側斜め前方、右側方の順に入力信号を確認し、その都度障害物の有無を判断する。すなわち、従来のように、全ての障害物検出部からの検出結果を合成して障害物を検出するのではなく、1つの障害物検出部50の検出範囲における障害物を検出し、検出するたびに走行制御を行なう。1回の検出に要する時間は短くなり、走行制御を調整する回数が増える。これに合わせて、掃除機本体10の走行が微調整される。したがって、掃除機本体10は、障害物に衝突することなく安全に走行できる。
〔第2実施形態〕
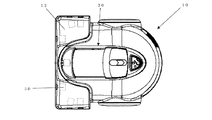
図5に本発明の第2実施形態に係る自走式電気掃除機を示す。この自走式電気掃除機が第1実施形態の自走式電気掃除機と相違する点は、バンパー12に備えられている障害物検出部50の配置が異なる。
図5に本発明の第2実施形態に係る自走式電気掃除機を示す。この自走式電気掃除機が第1実施形態の自走式電気掃除機と相違する点は、バンパー12に備えられている障害物検出部50の配置が異なる。
本実施形態の各障害物検出部50は、図5に示すように、自走式電気掃除機の上面から見て円弧上に配置する。これに応じて、バンパー12は、複数の窓が形成される。この障害物検出部50の配置により、自走式電気掃除機の正面および左右側方に視野角が広がる。障害物を検出することができる。
また、隣り合う障害物検出部50同士の検出範囲が重なり合うように配置してもよい。すなわち、掃除機本体10の走行速度や旋回範囲に合わせて、障害物検出部50の検出範囲を重なるようにする。例えば、掃除機本体10の走行速度が速い場合、早い段階で障害物の位置を検出し、走行を制御する必要があるので、掃除機本体10から離れた位置、すなわち、障害物検出部50が検出できる最大距離で検出範囲が重なり合うようにする。この場合、障害物検出部50は掃除機本体10近くの障害部を検出することがないので、障害物検出部50同士の間隔を広くして配置する。
障害物が多い空間では、掃除機本体10が旋回する回数も多く、掃除機本体10近くの障害物を検出する必要がある。この場合は、掃除機本体10の近い位置、すなわち、障害物検出部50が検出できる最小距離で検出範囲が重なり合うようにする。この場合、各障害物検出部50の検出範囲を近づける必要があるので、障害物検出部50同士の間隔を狭くして配置する。
このように、隣り合う障害物検出部50同士の検出範囲が重なり合うことで、障害物検出部50の死角を減少できる。掃除機本体10の左右側方から前面にかけて障害物を検出することができる。なお、後面側についても同様に障害物検出部50を配置しても良い。
上記のような配置により、必要最小限の障害物検出部50によって、広範囲の障害物を検出することができ、障害物検出部50の個数を減らすことができる。
〔第3実施形態〕
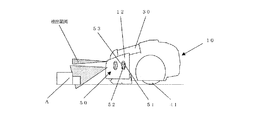
図6および図7に本発明の第3実施形態に係る自走式電気掃除機を示す。本実施形態の障害物検出部50は、図6に示すように、発光素子51aの配列方向が垂直方向とされた横置きタイプ、すなわち、発光部51と受光部52とが床面に対して平行(水平方向)に並ぶように配置したものと、配列方向が水平方向とされた縦置きタイプ、すなわち、発光部51と受光部52とが床面に対して直角(垂直方向)に並ぶように配置したものとを交互に設ける。
図6および図7に本発明の第3実施形態に係る自走式電気掃除機を示す。本実施形態の障害物検出部50は、図6に示すように、発光素子51aの配列方向が垂直方向とされた横置きタイプ、すなわち、発光部51と受光部52とが床面に対して平行(水平方向)に並ぶように配置したものと、配列方向が水平方向とされた縦置きタイプ、すなわち、発光部51と受光部52とが床面に対して直角(垂直方向)に並ぶように配置したものとを交互に設ける。
詳しくは、横置き障害物検出部60では、発光素子51aの配列方向が床面に対して垂直方向と平行になるので、検出範囲が垂直方向に広くなる。また、縦置き障害物検出部70では、発光素子51aの配列方向が床面に対して水平方向と平行になるので、検出範囲が水平方向に広くなる。各発光部51の位置が床面に対して高さ方向の位置が異なる。すなわち、横置き障害物検出部60の発光部51は、縦置き障害物検出部70の発光部51より低い位置となる。
これにより、垂直方向に検出範囲を広く持つ横置き障害物検出部60を掃除機本体10の前方で床面側に傾けて取り付けることにより、進行方向に存在する低い段差を検出することができる。例えば、図7に示すように、進行方向に存在する段差Aを検出することができる。
なお、横置き障害物検出部60の受光素子52aを複数備えた場合、各受光素子52aに受光する時間の差から複数の段差Aを検出することができるので、段差Aが複数ある場合でも夫々の段差Aと床面を判断することができる。受光素子52aがCCDカメラ等のように画像処理が可能なものであれば、1つの受光素子52aでも複数の段差Aと床面を判断することができる。
制御部は、横置き障害物検出部60からの出力信号により床面の段差Aの有無を判断する。また、縦置き障害物検出部70からの出力信号により障害物の有無を判断する。そして、制御部は、障害物および段差Aを避けるように走行制御を行なう。したがって、掃除機本体10は、凹凸のある床面でも支障なく走行することができる。
なお、本発明は、上記実施形態に限定されるものではなく、本発明の範囲内で修正・変更を加えることができるのは勿論である。例えば、上記実施形態では自走式電気掃除機に備えられた障害物検出部について説明したが、特にこの限りではなく、自律して走行するロボット等の移動体に取り付けてもよい。また、障害物検出部の取り付け方向は、縦置きと横置きだけでなく、斜めに傾けて取り付けもよい。
また、自走式移動体の進行方向に応じて、障害物検出部を移動させてもよい。例えば、制御部が決定した移動方向および移動速度に基づいて障害物検出部を移動させる。これにより、自走式移動体が旋回した際、突如現れた障害物に対しても迅速に対応することができ、より確実に障害物を避けて走行することができる。また、障害物検出部は、夫々別々に移動させてもよい。この場合、予め旋回する方向に対して障害物検出部を移動させ、事前に障害物の位置を検出することができる。
また、横置き障害物検出部だけを複数設けてもよい。この場合、障害物は少ないが、段差のような凹凸の多い床面を走行するのに適した移動体を実現できる。また、複数の発光素子を円弧上に並べて1つの発光部とし、複数の受光素子と組み合わせてもよい。これにより、1つの障害物検出部で広範囲を検出することができる。
さらに、障害物検出部を縦置き、横置きに取り付ける際、第2実施形態のように、円弧上に配置してもよい。これにより、床面に対して垂直方向に検出範囲が広がるだけでなく、湯下面に対して水平方向の検出範囲においても広くすることができ、障害物検出部の検出範囲の死角をなくすことができる。
10 掃除機本体
10a 連結軸
12 バンパー
13 電動送風機
15 凹部
16 電源部
20 吸込口体
21c 側方吸込口
30 集塵器
41 駆動輪
50 障害物検出部
51 発光部
51a 発光素子
51b レンズ体
52 受光部
52a 受光素子
52b レンズ体
53 ケーシング
60 横置き障害物検出部
70 縦置き障害物検出部
A 段差
10a 連結軸
12 バンパー
13 電動送風機
15 凹部
16 電源部
20 吸込口体
21c 側方吸込口
30 集塵器
41 駆動輪
50 障害物検出部
51 発光部
51a 発光素子
51b レンズ体
52 受光部
52a 受光素子
52b レンズ体
53 ケーシング
60 横置き障害物検出部
70 縦置き障害物検出部
A 段差
Claims (9)
- 床面を走行するための走行手段を有する本体に、走行する空間内の障害物を検出する障害物検出部が設けられ、
前記障害物検出部は、複数の発光素子と、少なくとも1つの受光素子とを備え、
前記発光素子は、検出範囲を特定方向に広げるように一列に並べて配置したことを特徴とする自走式移動体。 - 複数の障害物検出部が、自走式移動体の進行方向に向かって前方および左右側方を検出できるように円弧上に配置されたことを特徴とする請求項1に記載の自走式移動体。
- 少なくとも1つの障害物検出部は、その検出範囲が他の障害物検出部の検出範囲と異なるように、向きを変えて配置されたことを特徴とする請求項1または2に記載の自走式移動体。
- 横置きされた障害物検出部は、発光素子を床面に対して垂直方向に一列に並べて床面に対して垂直方向の検出範囲を広くし、
縦置きされた障害物検出部は、発光素子を床面に対して水平方向に一列に並べて床面に対して水平方向の検出範囲を広くしたことを特徴とする請求項3に記載の自走式移動体。 - 横置き障害物検出部の検出範囲が縦置き障害物検出部の検出範囲よりも低くなるように、前記横置き障害物検出部の発光素子は低い位置に配置されたことを特徴とする請求項4に記載の自走式移動体。
- 隣り合う障害物検出部が重なり合うように、各障害物検出部は、本体の前方に集中的に配置されたことを特徴とする請求項1〜5のいずれかに記載の自走式移動体。
- 障害物検出部からの検出結果に基づいて走行手段を制御する制御部を備え、
前記制御部は、前記障害物検出部からの信号に基づいて検出範囲毎に障害物の有無を判断する障害物判断手段を有することを特徴とする請求項1〜6のいずれかに記載の自走式移動体。 - 床面を走行するための走行手段を有する本体に、複数の発光素子および少なくとも1つの受光素子を有する障害物検出部が複数設けられ、
複数の発光素子は、床面に対して垂直方向に一列に並べられ、
床面に対して垂直方向の検出範囲が広くされたことを特徴とする自走式移動体。 - 障害物検出部からの検出結果に基づいて走行手段を制御する制御部を備え、
制御部は、障害物検出部からの信号により床面の段差の有無を判断する段差判断手段を有することを特徴とする請求項8に記載の自走式移動体。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2006010480A JP2007193538A (ja) | 2006-01-18 | 2006-01-18 | 自走式移動体 |
| PCT/JP2006/324654 WO2007083459A1 (ja) | 2006-01-18 | 2006-12-11 | 自走式移動体 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2006010480A JP2007193538A (ja) | 2006-01-18 | 2006-01-18 | 自走式移動体 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2007193538A true JP2007193538A (ja) | 2007-08-02 |
| JP2007193538A5 JP2007193538A5 (ja) | 2008-01-10 |
Family
ID=38287416
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2006010480A Pending JP2007193538A (ja) | 2006-01-18 | 2006-01-18 | 自走式移動体 |
Country Status (2)
| Country | Link |
|---|---|
| JP (1) | JP2007193538A (ja) |
| WO (1) | WO2007083459A1 (ja) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2013252431A (ja) * | 2012-06-07 | 2013-12-19 | Samsung Electronics Co Ltd | 障害物感知モジュール及びそれを備えた掃除ロボット |
| JP2017134697A (ja) * | 2016-01-29 | 2017-08-03 | 日立アプライアンス株式会社 | 床面を移動する移動体 |
| JP2022537248A (ja) * | 2019-05-09 | 2022-08-25 | アクチエボラゲット エレクトロルックス | ラインアレイを用いた物体の検出 |
Families Citing this family (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5761152B2 (ja) * | 2011-10-17 | 2015-08-12 | 日本精工株式会社 | 走行装置 |
| GB2529847B (en) | 2014-09-03 | 2018-12-19 | Dyson Technology Ltd | A mobile Robot with Independently Adjustable Light Sources |
| GB2529846B (en) | 2014-09-03 | 2019-02-20 | Dyson Technology Ltd | Illumination Control of a Vision System for a Mobile Robot |
| GB2529848B (en) * | 2014-09-03 | 2018-12-19 | Dyson Technology Ltd | A mobile robot |
| JP7080393B2 (ja) * | 2018-08-01 | 2022-06-03 | シャークニンジャ オペレーティング エルエルシー | ロボット掃除機 |
| SE544561C2 (en) | 2020-05-08 | 2022-07-19 | Husqvarna Ab | An outdoor robotic work tool comprising an environmental detection system |
Family Cites Families (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH07229724A (ja) * | 1994-02-22 | 1995-08-29 | Nikon Corp | 段差認識装置 |
| JP3224711B2 (ja) * | 1994-11-22 | 2001-11-05 | 富士通株式会社 | 測距装置 |
| JP2004237075A (ja) * | 2003-02-06 | 2004-08-26 | Samsung Kwangju Electronics Co Ltd | 外部充電装置を有するロボット掃除機システム及びロボット掃除機の外部充電装置の接続方法。 |
| JP2005241340A (ja) * | 2004-02-25 | 2005-09-08 | Sharp Corp | マルチ測距装置 |
-
2006
- 2006-01-18 JP JP2006010480A patent/JP2007193538A/ja active Pending
- 2006-12-11 WO PCT/JP2006/324654 patent/WO2007083459A1/ja active Application Filing
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2013252431A (ja) * | 2012-06-07 | 2013-12-19 | Samsung Electronics Co Ltd | 障害物感知モジュール及びそれを備えた掃除ロボット |
| US9846435B2 (en) | 2012-06-07 | 2017-12-19 | Samsung Electronics Co., Ltd. | Obstacle sensing module and cleaning robot including the same |
| JP2017134697A (ja) * | 2016-01-29 | 2017-08-03 | 日立アプライアンス株式会社 | 床面を移動する移動体 |
| JP2022537248A (ja) * | 2019-05-09 | 2022-08-25 | アクチエボラゲット エレクトロルックス | ラインアレイを用いた物体の検出 |
Also Published As
| Publication number | Publication date |
|---|---|
| WO2007083459A1 (ja) | 2007-07-26 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2007193538A (ja) | 自走式移動体 | |
| KR100654676B1 (ko) | 로봇청소기 | |
| KR100595571B1 (ko) | 로봇 청소기 | |
| US8489234B2 (en) | Mobile robot and controlling method thereof | |
| JP2002366227A (ja) | 移動作業ロボット | |
| JP2014204984A (ja) | センサーモジュール及びこれを備えるロボット掃除機 | |
| KR100479379B1 (ko) | 자동주행 로봇 청소기 | |
| KR101060638B1 (ko) | 로봇 청소기 | |
| WO2021121031A1 (zh) | 自主机器人及其控制方法 | |
| KR20060095657A (ko) | 로봇청소기 | |
| JP2005216022A (ja) | 自律走行ロボットクリーナー | |
| KR20080093768A (ko) | 주행로봇의 위치감지장치 및 이를 이용한 로봇 청소기 | |
| KR20090096009A (ko) | 로봇 청소기 | |
| KR20080027675A (ko) | 로봇청소기 및 그에 따른 제어방법 | |
| US20220167815A1 (en) | Robot cleaner | |
| KR20020080900A (ko) | 로봇 청소기의 장애물 감지 장치 및 그 방법 | |
| KR20090112984A (ko) | 장애물 감지 센서를 구비한 이동로봇 | |
| KR100722762B1 (ko) | 로봇 청소기의 장애물 형태 감지 장치 및 그 방법 | |
| AU2020247578B2 (en) | Robot cleaner | |
| KR102423497B1 (ko) | 로봇 청소기의 제어 방법 | |
| KR20050063548A (ko) | 로봇 청소기의 흡입헤드 높이조절장치 및 그 방법 | |
| JP2003280737A (ja) | 移動装置 | |
| KR101479238B1 (ko) | 로봇청소기 및 그 제어방법 | |
| JP6626723B2 (ja) | 床面を移動する移動体 | |
| KR20050115994A (ko) | 로봇 청소기 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20071120 |
|
| A871 | Explanation of circumstances concerning accelerated examination |
Free format text: JAPANESE INTERMEDIATE CODE: A871 Effective date: 20071120 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20071225 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20080422 |