JP2007147520A - 車輪状態推定装置および車両制御装置 - Google Patents
車輪状態推定装置および車両制御装置 Download PDFInfo
- Publication number
- JP2007147520A JP2007147520A JP2005344722A JP2005344722A JP2007147520A JP 2007147520 A JP2007147520 A JP 2007147520A JP 2005344722 A JP2005344722 A JP 2005344722A JP 2005344722 A JP2005344722 A JP 2005344722A JP 2007147520 A JP2007147520 A JP 2007147520A
- Authority
- JP
- Japan
- Prior art keywords
- wheel
- force
- acceleration
- detection result
- detection means
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
- 238000001514 detection method Methods 0.000 claims abstract description 339
- 230000001133 acceleration Effects 0.000 claims abstract description 322
- 239000000725 suspension Substances 0.000 claims description 22
- 238000012545 processing Methods 0.000 abstract description 9
- 238000004891 communication Methods 0.000 description 29
- 238000004364 calculation method Methods 0.000 description 28
- 230000001276 controlling effect Effects 0.000 description 20
- 230000006870 function Effects 0.000 description 18
- 230000005856 abnormality Effects 0.000 description 15
- 230000000875 corresponding effect Effects 0.000 description 14
- 238000003860 storage Methods 0.000 description 12
- 238000000034 method Methods 0.000 description 7
- 230000002159 abnormal effect Effects 0.000 description 6
- 238000010586 diagram Methods 0.000 description 6
- 239000011324 bead Substances 0.000 description 5
- 229920001971 elastomer Polymers 0.000 description 5
- 239000005060 rubber Substances 0.000 description 5
- 230000009471 action Effects 0.000 description 4
- 230000008859 change Effects 0.000 description 4
- 230000007423 decrease Effects 0.000 description 3
- 238000013461 design Methods 0.000 description 3
- 239000000446 fuel Substances 0.000 description 3
- 238000009434 installation Methods 0.000 description 3
- 230000008569 process Effects 0.000 description 3
- 238000001228 spectrum Methods 0.000 description 3
- 230000005540 biological transmission Effects 0.000 description 2
- 230000033001 locomotion Effects 0.000 description 2
- 238000004519 manufacturing process Methods 0.000 description 2
- 238000012986 modification Methods 0.000 description 2
- 230000004048 modification Effects 0.000 description 2
- 230000003014 reinforcing effect Effects 0.000 description 2
- 238000005070 sampling Methods 0.000 description 2
- 230000006399 behavior Effects 0.000 description 1
- 230000008602 contraction Effects 0.000 description 1
- 230000002596 correlated effect Effects 0.000 description 1
- 238000013500 data storage Methods 0.000 description 1
- 230000003247 decreasing effect Effects 0.000 description 1
- 238000006073 displacement reaction Methods 0.000 description 1
- 238000009826 distribution Methods 0.000 description 1
- 239000002657 fibrous material Substances 0.000 description 1
- 238000002347 injection Methods 0.000 description 1
- 239000007924 injection Substances 0.000 description 1
- 238000007726 management method Methods 0.000 description 1
- 238000005259 measurement Methods 0.000 description 1
- 230000002093 peripheral effect Effects 0.000 description 1
- 238000013519 translation Methods 0.000 description 1
Images









Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60T—VEHICLE BRAKE CONTROL SYSTEMS OR PARTS THEREOF; BRAKE CONTROL SYSTEMS OR PARTS THEREOF, IN GENERAL; ARRANGEMENT OF BRAKING ELEMENTS ON VEHICLES IN GENERAL; PORTABLE DEVICES FOR PREVENTING UNWANTED MOVEMENT OF VEHICLES; VEHICLE MODIFICATIONS TO FACILITATE COOLING OF BRAKES
- B60T8/00—Arrangements for adjusting wheel-braking force to meet varying vehicular or ground-surface conditions, e.g. limiting or varying distribution of braking force
- B60T8/17—Using electrical or electronic regulation means to control braking
- B60T8/172—Determining control parameters used in the regulation, e.g. by calculations involving measured or detected parameters
- B60T8/1725—Using tyre sensors, e.g. Sidewall Torsion sensors [SWT]
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60T—VEHICLE BRAKE CONTROL SYSTEMS OR PARTS THEREOF; BRAKE CONTROL SYSTEMS OR PARTS THEREOF, IN GENERAL; ARRANGEMENT OF BRAKING ELEMENTS ON VEHICLES IN GENERAL; PORTABLE DEVICES FOR PREVENTING UNWANTED MOVEMENT OF VEHICLES; VEHICLE MODIFICATIONS TO FACILITATE COOLING OF BRAKES
- B60T2240/00—Monitoring, detecting wheel/tire behaviour; counteracting thereof
- B60T2240/04—Tire deformation
Abstract
【課題】車輪に作用する力または加速度を検出するためのいずれかのセンサの検出結果の利用を停止した場合においても、車輪に作用する力または加速度の適切な処理を可能とする車輪状態推定装置および車両制御装置を提供する。
【解決手段】車両10に装着された車輪14に作用する力または加速度を推定する車輪状態推定装置において、車輪14に作用する力または加速度を検出する加速度センサ26が設けられた4つの車輪14のうち、いずれかの車輪14の加速度センサ26の検出結果の利用を停止した場合に、他の車輪14の加速度センサ26の検出結果を利用して、加速度センサ26の検出結果の利用を停止した車輪14に作用する力または加速度を推定する。
【選択図】図1
【解決手段】車両10に装着された車輪14に作用する力または加速度を推定する車輪状態推定装置において、車輪14に作用する力または加速度を検出する加速度センサ26が設けられた4つの車輪14のうち、いずれかの車輪14の加速度センサ26の検出結果の利用を停止した場合に、他の車輪14の加速度センサ26の検出結果を利用して、加速度センサ26の検出結果の利用を停止した車輪14に作用する力または加速度を推定する。
【選択図】図1
Description
本発明は、車輪状態推定装置および車両制御装置に関し、特に、車輪に作用する力や加速度を検出するセンサが車輪に設けられた車両における車輪状態推定装置および車両制御装置に関する。
従来から、トレッド部、サイドウォール部、ビード部の少なくとも1箇所に、該当箇所のゴムの歪を検出する歪ゲージが埋設された車両用タイヤが知られている(例えば、特許文献1参照。)。この種のタイヤを用いることにより、歪みゲージの出力値に基づいてタイヤと路面との接触状況等を把握することが可能となる。また、従来から、車両バネ下部に設けられた振動センサにより検出される車両バネ下部の振動の出力レベル(振動レベル)に基づいて車両の走行状態を推定する装置が知られている(例えば、特許文献2参照)。この装置では、振動センサにより検出される車両バネ下部の振動レベルを周波数変換することにより振動レベルの周波数スペクトルを求めると共に、得られた周波数スペクトルの少なくとも2つの周波数帯域の振動レベルを演算し、振動レベル演算値と、予め記憶された振動レベルの周波数スペクトルマスターカーブとを比較することにより路面状態が推定される。
更に、従来から、トレッド部の踏面が路面に接地した際に変形する変形する感圧導電ゴム体の抵抗変化により電流値が変化する検知信号を利用してタイヤの接地力を検知するタイヤ接地力検知方法が知られている(例えば、特許文献3参照。)。また、タイヤトレッド部の接地時間などのタイヤの接地長と1:1の対応関係にある接地長の指標をタイヤの複数位置で検出して比較することにより、タイヤに与えられる横力または上下力を推定する方法が知られている(例えば、特許文献4参照。)。また、歪みセンサをサイドウォール部に設けタイヤ表面歪みを検出することによりタイヤに与えられる前後力、横力、または上下力を検出する、タイヤに作用する力の検出方法が知られている(例えば、特許文献5参照。)。また、エンコーダと協働して測定値ピックアップの出力信号などが自動車コントロールシステムに供給されるタイヤサイドウォールねじれセンサが知られている(例えば、特許文献6参照。)。
特開2003−226120号公報
国際公開第01/098123号パンフレット
特開2005−082010号公報
特開2005−205956号公報
特開2005−126008号公報
特表2003−509666号公報
しかし、センサまたはその検出結果を送信する通信経路は何かしらの原因によって異常が生じる場合がある。特にセンサが車輪に設けられる場合、車輪の回転や車輪に作用する衝撃などの外力によって、センサまたはその通信経路は過酷な条件下に置かれることになる。また、センサの信頼性の観点などから、センサの検出結果を利用することが望ましくない場合も考えられる。このため、センサの検出結果を利用して車両制御や運転者への報知などを適切に実行する上では、一部のセンサの検出結果の利用を停止した場合を考慮することが望ましい。
そこで、本発明は、車輪に作用する力または加速度を検出するためのいずれかのセンサの検出結果の利用を停止した場合においても、車輪に作用する力または加速度の適切な処理を可能とする車輪状態推定装置および車両制御装置を提供することを目的とする。
上記課題を解決するために、本発明のある態様の車輪状態推定装置は、車両に装着された車輪に作用する力または加速度を推定する車輪状態推定装置であって、車輪に作用する力または加速度を検出する車輪側検出手段が設けられた複数の車輪のうち、いずれかの車輪の車輪側検出手段の検出結果の利用を停止した場合に、他の車輪の車輪側検出手段の検出結果を利用して、車輪側検出手段の検出結果の利用を停止した車輪に作用する力または加速度を推定する推定手段を備える。
この態様によれば、たとえば車輪側検出手段またはその検出結果を送信する通信経路などに異常が発生したり車輪側検出手段の検出精度が低下したなどによって、いずれかの車輪の車輪側検出手段の検出結果の利用を停止した場合においても、その車輪に作用する力または加速度を適切に推定することができる。
前記車輪側検出手段は、車両に設置された4つの車輪の各々に設けられ、前記推定手段は、4つの車輪のうち、1つの車輪の車輪側検出手段の検出結果の利用を停止した場合に、他の3つの車輪の車輪側検出手段の検出結果を利用して、車輪側検出手段の検出結果の利用を停止した車輪に作用する力または加速度を推定してもよい。この態様によれば、4つの車輪を有する一般的な車両などにおいて、検出結果が利用可能な他の3つの車輪の検出手段の検出結果を利用して推定を実施するため、検出手段の検出結果の利用を停止した車輪に作用する力または加速度を、精度良く推定することができる。
また、車輪側検出手段の検出結果の利用を停止した車輪に作用する力または加速度をS1、車輪側検出手段の検出結果の利用を停止した車輪と前後同じ側且つ左右反対側の車輪に作用する力または加速度をS2、前後反対側且つ左右同じ側の車輪に作用する力または加速度をS3、前後反対側且つ左右反対側の車輪に作用する力または加速度をS4とした場合に、本前記推定手段は、前記車輪側検出手段により検出されたS2、S3、およびS4を、
S1=S2×S3/S4
とすることによりS1を推定してもよい。この態様によれば、簡易な演算によって車輪に作用する力または加速度を推定することができる。このため、車輪状態推定装置の設計および車輪状態推定装置による制御の負担を軽減させることができる。
S1=S2×S3/S4
とすることによりS1を推定してもよい。この態様によれば、簡易な演算によって車輪に作用する力または加速度を推定することができる。このため、車輪状態推定装置の設計および車輪状態推定装置による制御の負担を軽減させることができる。
なお、本態様に係る車輪状態推定装置は、S1=K×S2×S3/S4となる係数Kを予め保持することによりS1を推定してもよい。このように係数Kを予め保持することにより、車輪の各々に作用する力の不均衡を考慮して車輪に作用する力または加速度を精度良く推定することができる。なお、この係数Kは、所定時間後毎に取得して保持してもよい。これによって、検出結果の利用を停止した場合においても、その直前に取得した係数Kによって推定することができるため、例えば車両に積載する積載物またはその積載位置が変化したような場合でも、車輪に作用する力または加速度を精度良く推定することができる。
本発明の別の態様は、車両制御装置である。この装置は、車輪に作用する力または加速度を検出する車輪側検出手段が各々に設けられた複数の車輪のうち、いずれかの車輪の車輪側検出手段の検出結果の利用を停止した場合に、他の車輪の車輪側検出手段の検出結果を利用して、車輪側検出手段の検出結果の利用を停止した車輪に作用する力または加速度を推定する推定手段と、検出された力または加速度もしくは推定された力または加速度を利用して、各々の車輪に与えるべき制動力を決定する制動力決定手段と、決定された制動力を実現するよう、各々の車輪の制動力を制御する制動制御手段と、を備える。
近年、様々な情報を利用して各々の車輪の制動力を独立に制御することにより、車両の姿勢を制御する姿勢制御の開発が進められている。この態様によれば、車輪に作用する力または加速度を利用して車輪の制動力を制御することによって姿勢制御を実施するような車両において、いずれかの車輪の検出手段の検出結果の利用を停止した場合においても、車輪に作用する力または加速度を適切に推定することができるため、安定した姿勢制御を実現することが可能となる。
本発明の別の態様は、車両制御装置である。この装置は、車輪に作用する力または加速度を検出する車輪側検出手段が各々に設けられた複数の車輪のうち、いずれかの車輪の車輪側検出手段の検出結果の利用を停止した場合に、他の車輪の車輪側検出手段の検出結果を利用して、車輪側検出手段の検出結果の利用を停止した車輪に作用する力または加速度を推定する推定手段と、検出された力または加速度、もしくは推定された力または加速度を利用して、車輪を駆動する駆動力を決定する駆動力決定手段と、決定された駆動力を実現するよう車輪を駆動する駆動力を制御する駆動制御手段と、を備える。この態様によれば、車輪に作用する力または加速度を利用して車輪を駆動する駆動力を制御することによって姿勢制御を実施するような車両において、いずれかの車輪の検出手段の検出結果の利用を停止した場合においても、車輪に作用する力または加速度を適切に推定することができるため、安定した姿勢制御を実現することが可能となる。
本発明のさらに別の態様は、車輪状態推定装置である。この装置は、車輪に作用する力または加速度を推定する車輪状態推定装置であって、車輪に作用する力または加速度を検出する車輪側検出手段が各々に設けられた複数の車輪のうち、いずれかの車輪の車輪側検出手段の検出結果の利用を停止した場合に、車体に作用する力または加速度を検出する車体側検出手段の検出結果を利用して、車輪側検出手段の検出結果の利用を停止した車輪に作用する力または加速度を推定する推定手段を備える。
車体にはバネ上Gセンサやサスペンションのストローク量を検出するストロークセンサなど、車体に作用する力や加速度を検出する検出手段が設けられている場合がある。この態様によれば、車輪側検出手段の検出結果の利用を停止した場合において、車体側検出手段を有効に利用して、その車輪に作用する力または加速度を推定することができる。
前記推定手段は、車輪に作用する力または加速度を検出する車輪側検出手段が各々に設けられた複数の車輪のうち、いずれかの車輪の車輪側検出手段の検出結果の利用を停止した場合に、車輪と車体との間に介在するサスペンションの各々に対応して設けられサスペンションのストローク量を検出するストローク量検出手段の検出結果を利用して、車輪側検出手段の検出結果の利用を停止した車輪に作用する力または加速度を推定してもよい。この態様によれば、サスペンションのストローク量を検出するストローク量検出手段を有効に利用して、検出結果の利用を停止した車輪に作用する力または加速度を推定することができる。
本発明のさらに別の態様は、車両制御装置である。この装置は、車輪に作用する力または加速度を検出する車輪側検出手段が各々に設けられた複数の車輪のうち、いずれかの車輪の車輪側検出手段の検出結果の利用を停止した場合に、車体に作用する力または加速度を検出する車体側検出手段の検出結果を利用して、車輪側検出手段の検出結果の利用を停止した車輪に作用する力または加速度を推定する推定手段と、検出された力または加速度もしくは推定された力または加速度を利用して、各々の車輪に与えるべき制動力を決定する制動力決定手段と、決定された制動力を実現するよう、各々の車輪の制動力を制御する制動制御手段と、を備える。この態様によれば、車輪に作用する力または加速度を利用して各々の車輪に与える制動力を制御することによって姿勢制御を実施するような車両において、いずれかの車輪の検出手段の検出結果の利用を停止した場合においても、車体側検出手段を有効に利用して車輪に作用する力または加速度を適切に推定することができるため、安定した姿勢制御を実現することが可能となる。
本発明のさらに別の態様は、車両制御装置である。この装置は、車輪に作用する力または加速度を検出する車輪側検出手段が各々に設けられた複数の車輪のうち、いずれかの車輪の車輪側検出手段の検出結果の利用を停止した場合に、車体に作用する力または加速度を検出する車体側検出手段の検出結果を利用して、車輪側検出手段の検出結果の利用を停止した車輪に作用する力または加速度を推定する推定手段と、検出された力または加速度、もしくは推定された力または加速度を利用して、車輪を駆動する駆動力を決定する駆動力決定手段と、決定された駆動力を実現するよう車輪を駆動する駆動力を制御する駆動制御手段と、を備える。この態様によれば、車輪に作用する力または加速度を利用して車輪を駆動する駆動力を制御することによって姿勢制御を実施するような車両において、いずれかの車輪の検出手段の検出結果の利用を停止した場合においても、車体側検出手段を有効に利用して車輪に作用する力または加速度を適切に推定することができるため、安定した姿勢制御を実現することが可能となる。
本発明のさらに別の態様は、車輪状態推定装置である。この装置は、車輪に作用する力または加速度を推定する車輪状態推定装置であって、車輪に作用する力または加速度を検出する車輪側検出手段が各々に設けられた複数の車輪のうち、いずれかの車輪の車輪側検出手段の検出結果の利用を停止した場合に、車体に作用する力または加速度を検出する車体側検出手段の検出結果を利用して、複数の車輪に作用する力または加速度を推定する推定手段を備える。
この態様によれば、車輪側検出手段の検出結果の利用を停止した場合において、車体側検出手段を有効に利用して、その車輪に作用する力または加速度を推定することができる。また、複数の車輪において、作用する力または加速度の検出を車輪側検出手段または車体側検出手段のいずれか一方によって実施するため、種類の異なる検出装置を使用することなどによる検出結果の相違を抑制することができる。
車輪に作用する力または加速度を検出する車輪側検出手段が各々に設けられた複数の車輪のうち、いずれかの車輪の車輪側検出手段の検出結果の利用を停止した場合に、車輪と車体とに介在するサスペンションの各々に対応して設けられサスペンションのストローク量を検出するストローク量検出手段の検出結果を利用して、複数の車輪に作用する力または加速度を推定してもよい。この態様によれば、サスペンションのストローク量を検出するストローク量検出手段を有効に利用して、検出結果の利用を停止した車輪に作用する力または加速度を推定することができる。
本発明のさらに別の態様は、車両制御装置である。この装置は、車輪に作用する力または加速度を検出する車輪側検出手段が各々に設けられた複数の車輪のうち、いずれかの車輪の車輪側検出手段の検出結果の利用を停止した場合に、車体に作用する力および加速度を検出する車体状態検出手段の検出結果を利用して、複数の車輪に作用する力または加速度を推定する車輪状態推定装置と、推定された力または加速度を利用して、各々の車輪に与えるべき制動力を決定する制動力決定手段と、決定された制動力を実現するように各々の車輪の制動力を制御する制動制御手段と、を備える。この態様によれば、車輪に作用する力または加速度を利用して各々の車輪に与える制動力を制御することによって姿勢制御を実施するような車両において、いずれかの車輪の検出手段の検出結果の利用を停止した場合においても、車体側検出手段を有効に利用して車輪に作用する力または加速度を適切に推定することができるため、安定した姿勢制御を実現することが可能となる。
本発明のさらに別の態様は、車両制御装置である。この装置は、車輪に作用する力または加速度を検出する車輪側検出手段が各々に設けられた複数の車輪のうち、いずれかの車輪の車輪側検出手段の検出結果の利用を停止した場合に、車体に作用する力および加速度を検出する車体状態検出手段の検出結果を利用して、複数の車輪に作用する力または加速度を推定する推定手段と、推定された力または加速度を利用して、車輪を駆動する駆動力を決定する駆動力決定手段と、決定された駆動力を実現するように車輪を駆動する駆動力を制御する駆動制御手段と、を備える。この態様によれば、車輪に作用する力または加速度を利用して車輪を駆動する駆動力を制御することによって姿勢制御を実施するような車両において、いずれかの車輪の検出手段の検出結果の利用を停止した場合においても、車体側検出手段を有効に利用して車輪に作用する力または加速度を適切に推定することができるため、安定した姿勢制御を実現することが可能となる。
本発明によれば、車輪に作用する力または加速度を検出するためのいずれかのセンサの検出結果の利用を停止した場合においても、車輪に作用する力または加速度の適切な処理を可能とする車輪状態推定装置および車両制御装置を提供することが可能となる。
以下、図面を参照して本発明の実施の形態(以下、「実施形態」という。)について詳細に説明する。
(第1の実施形態)
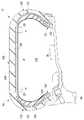
図1は、第1の実施形態に係る車両制御装置150が搭載された車両10を示す概略構成図であり、図2は、第1の実施形態に係る車両制御装置150が搭載された車両10における車輪14の部分断面図である。車両制御装置150は、電子制御ユニット(以下「ECU」という)100、ECB−ECU200(ECB:Electronically Controlled Brake System(電子制御ブレーキシステム))、車体側通信機30、車輪14、車輪14に設けられた加速度センサ26および通信機28などを含む。図1に示される車両10は、車体12に設けられた4つの車輪14と、これら4つの車輪14のうちの操舵輪を操舵する図示されない操舵装置や、これら4つの車輪14のうちの駆動輪を駆動する図示されない走行駆動源、制動装置等を備える。車輪14は、それぞれホイール16とタイヤ18とを含む。本実施形態において、車輪14を構成するタイヤ18として、いわゆるランフラットタイヤが採用されている。ただし、タイヤ18として、ランフラットタイヤ以外の一般的な中空タイヤが採用されてもよいことはいうまでもない。
図1は、第1の実施形態に係る車両制御装置150が搭載された車両10を示す概略構成図であり、図2は、第1の実施形態に係る車両制御装置150が搭載された車両10における車輪14の部分断面図である。車両制御装置150は、電子制御ユニット(以下「ECU」という)100、ECB−ECU200(ECB:Electronically Controlled Brake System(電子制御ブレーキシステム))、車体側通信機30、車輪14、車輪14に設けられた加速度センサ26および通信機28などを含む。図1に示される車両10は、車体12に設けられた4つの車輪14と、これら4つの車輪14のうちの操舵輪を操舵する図示されない操舵装置や、これら4つの車輪14のうちの駆動輪を駆動する図示されない走行駆動源、制動装置等を備える。車輪14は、それぞれホイール16とタイヤ18とを含む。本実施形態において、車輪14を構成するタイヤ18として、いわゆるランフラットタイヤが採用されている。ただし、タイヤ18として、ランフラットタイヤ以外の一般的な中空タイヤが採用されてもよいことはいうまでもない。
図2に示されるように、タイヤ18は、いわゆるサイド補強型ランフラットタイヤであり、空気圧の低下時にランフラット走行が可能となっている。図2に示されるように、タイヤ18は、ビードコア180が埋設される一対のビード部181と、ビード部181からタイヤ径方向外側に延びる一対のサイドウォール部182と、両方のサイドウォール部182間に延在するトレッド部183とを含む。一対のビード部181、一対のサイドウォール部182およびトレッド部183には、例えば1枚の繊維材からなるカーカス184が埋設されており、トレッド部183には、カーカス184の外側に位置するようにベルト層185が埋設されている。サイドウォール部182の各々には、インナーライナ186の内側に位置するように補強ゴム187が埋設されている。
補強ゴム187の各々は、高い剛性を有し、ホイール16とタイヤ18とにより画成されるタイヤ内部空間188内の空気圧がパンク等により低下した際に、タイヤ18の全体をホイール16に対して支持することによりランフラット走行を可能とする。なお、車両10に設けられるタイヤ18は、サイド補強型のランフラットタイヤに限られるものではなく、タイヤ内部空間188内の空気圧が低下した際にタイヤ18の全体をホイール16に対して支持する中子を備えた中子型のランフラットタイヤであってもよい。
図1および図2に示されるように、上述の車輪14の各々には、それぞれ複数の加速度センサ26が備えられている。加速度センサ26の各々は、図2に示されるように、タイヤ18のトレッド部183の内面に固定されており、それぞれ設置箇所においてタイヤ18のタイヤ周方向における加速度を車輪情報として検出する。図3に示されるように、加速度センサ26は、トレッド部183の内面に対して、タイヤ周方向に複数配設されると共に、タイヤ幅方向に複数列設けられる。本実施形態では、タイヤ周方向において、18°間隔で合計20個の加速度センサ26がトレッド部183の内面に配置されている。
なお、加速度センサの代わりに歪みゲージを車輪に設け、その出力値であるひずみ量を車体12に搭載されたECU100において微分演算することによって加速度を算出するようにしてもよい。
本実施形態では、加速度センサ26の列がタイヤ幅方向に間隔Wを隔てて2列設けられており、タイヤ外側の列の加速度センサ26の各々と、タイヤ内側の列の加速度センサ26の各々とは、タイヤ18の幅方向において隣り合うように配置されている。なお、加速度センサ26の各々は、設置箇所においてタイヤ18のタイヤ径方向における加速度を車輪情報として検出するものであってもよい。また、車輪14の各々のタイヤ18に対して加速度センサ26の列が3列以上設けられてもよい。
図4は、本発明による車輪状態推定装置の制御ブロック図である。タイヤ18に設けられた加速度センサ26の各々は、それぞれ増幅器27を介して通信機(送信機)28に接続されており、車輪14の各々には、これらの加速度センサ26、増幅器27および通信機28に電力を供給するバッテリ29が設けられている。本実施形態では、20個すべての加速度センサ26および増幅器27に対して1つの通信機28が割り当てられている。増幅器27、通信機28およびバッテリ29は、対応する車輪14の適所、例えばホイール16の外周面等に配置されている。増幅器27は、対応する加速度センサ26の出力を増幅して通信機28に入力し、通信機28は加速度センサ26の出力値を示す信号を例えば1〜20msec程度の周期で車輪情報として無線送信する。
また、車両10の車体12には、図1および図4に示されるように、車輪14の各々に対応するように複数(本実施形態では4つ)の車体側通信機30が配置されている。車体側通信機30の各々は、対応する車輪14に設けられている通信機28との間で車輪情報等を示す信号を送受信する。なお、車体12には、車輪14の各々に設けられている通信機28との間で車輪情報等を示す信号を送受信可能な1つの車体側通信機が配置されてもよい。車体側通信機30の各々は、図1および図4に示されるように、車体12に搭載されたECU100に接続されている。車体側通信機30の各々は、対応する車輪14の通信機28から無線送信された情報を受信し、ECU100に入力する。通信機28から受信した情報は、ECU100の後述する記憶装置に逐次格納保持される。ECU100は、車体側通信機30の各々から受信した情報を用いて各種制御を実行する。
また、ECU100には、図4に示されるように、複数のセンサが接続されている。ECU100に接続されるセンサには、ストロークセンサ114およびバネ上Gセンサ115等が含まれる。バネ上Gセンサ115は、車輪14とサスペンションを介して接続される、いわゆるバネ上の車体の幅方向および/または上下方向における加速度を、車両10のバネ上振動として検出する。ストロークセンサ114は、車体12と車輪14との間に介在するサスペンションの伸縮長さであるストローク量を検出する。ストロークセンサ114は、サスペンションに直接設けられてストローク量を検出するものであってもよく、また、ロアアームなどに一端が接続された、バネ上とバネ下の相対的な変位を検出する車高センサがストロークセンサ114として機能してもよい。バネ上Gセンサ115およびストロークセンサ114はECU100に接続されており、各々の検出結果はECU100に入力される。
上述のように構成される車両10では、制動装置(電子制御式制動装置)を制御するECB−ECU200(図1参照)が、走行駆動源を制御するECUや操舵装置を制御するECU等と協調しながら、車両10の挙動を安定化させるために車両10の駆動、操舵および制動の統合制御(VDIM:Vehicle Dynamics Integrated Management)を実行する。このような統合制御に際しては、車両運動制御を高精度に実行する観点から、車輪14の各々のタイヤ18に作用する車輪幅方向における横力や、車輪高さ方向における荷重すなわち上下力を精度よく得ることが要求される。
このため、図4に示されるように、ECU100は、加速度センサ26の各々の検出結果を利用してタイヤ18の各々の接地面に作用する横力や上下力を算出する作用力演算部101を有する。更に、ECU100は、作用力演算部101とは別に作用力推定部102を有する。本実施形態の作用力推定部102は、作用力演算部101により算出される少なくとも2つのタイヤ18の接地面に作用する力に基づいて他のタイヤ18の接地面に作用する横力を推定し、所定の関係式を用いてタイヤ18の接地面に作用する上下力を推定する。また、ECU100は、記憶装置104を有している。記憶装置104は、各種制御プログラムを格納するROM、データ格納やプログラム実行のためのワークエリアとして利用されるRAM、および例えばフラッシュメモリなど書き込み可能な不揮発性メモリを含む。記憶装置104には、作用力演算部101による上下力または横力の算出に用いられる各種係数や、作用力推定部102による車輪力推定に用いられる上述の関数式値等が記憶されている。したがって、このような作用力推定部102を含むECU100は、車両に接地された車輪に作用する力を推定する推定手段として機能する。
作用力演算部101は、タイヤ18に設けられた加速度センサ26によって検出された検出結果としての加速度情報に基づいて、加速度センサ26の各々の検出値から得られる加速度波形におけるピーク間の時間隔Δtを求める。
ここで、加速度センサ26の各々は、上述のように設置箇所においてタイヤ18のタイヤ周方向における加速度を検出する。従って、図5に示されるように、加速度センサ26が配置された箇所に対応するトレッド部183が路面と接地するとき、すなわちタイヤ18の接地部の前端付近に加速度センサ26が位置したとき、その加速度センサ26から大きな加速度値(ピーク値)を示す信号が出力される。同様に、加速度センサ26が配置された箇所に対応するトレッド部183が路面から離れるとき、すなわちタイヤ18の接地部の後端付近に加速度センサ26が位置したとき、その加速度センサ26から大きな加速度値(ピーク値)を示す信号が出力される。このため、作用力演算部101は、加速度センサ26のサンプリング時間や、加速度波形のピーク間のデータサンプリング数等に基づいて、上記加速度波形におけるピーク間の時間隔Δtを算出する。
時間隔Δtを算出すると、作用力演算部101は、時間隔Δtと、該当する車輪14に対応した車輪速センサ111からの信号に示される車輪速や予め判明しているタイヤ半径等とに基づいて、該当する車輪14のタイヤ18の車両前後方向における接地長CLを算出する。本実施形態では、上述のように車輪14の各々のタイヤ18に対して加速度センサ26が2列にわたって設けられていることから、タイヤ18の内側列の加速度センサ26からの信号に基づいて算出される時間隔Δtより得られる接地長CLiと、タイヤ18の外側列の加速度センサ26からの信号に基づいて算出される時間隔Δtより得られる接地長CLoとが算出される。
タイヤ18の車両前後方向におけるタイヤ内側の接地長CLiとタイヤ外側の接地長CLoとを算出すると、作用力演算部101は、タイヤ18の車両前後方向におけるタイヤ内側の接地長CLiとタイヤ外側の接地長CLoとの比とから、タイヤ18の接地面に作用する車輪幅方向における横力Fxを求める。すなわち、上述のようにタイヤ18に対して加速度センサ26をタイヤ幅方向に複数列(2列)にわたって設けた場合、加速度センサ26の列ごとに求まるタイヤ18の車両前後方向における接地長CLiおよびCLoは、タイヤ18の接地面に作用する横力Fxの大きさに応じて変化する。従って、接地長CLiおよびCLoの比を用いれば、タイヤ18の接地面に作用する車輪幅方向における横力Fxを精度よく求めることが可能となる。本実施形態では、タイヤ内側の接地長CLiとタイヤ外側の接地長CLoとの比と、横力Fxとの相関を規定するマップあるいは関数式が予め定められて記憶装置104に記憶されており、作用力演算部101は、当該マップあるいは関数式を用いて横力Fxを取得する。このようなマップあるいは関数式は、基本的に、車両10の定常走行中(定速走行中)の操舵時を基準として作成される。
このように、複数の加速度センサ26をタイヤ18のトレッド部183の内面に配設すると共に、タイヤ周方向またはタイヤ径方向におけるタイヤ18の加速度を検出することにより、タイヤ周方向またはタイヤ径方向におけるタイヤ18の加速度の変化を把握して、加速度波形におけるピーク間の時間隔Δt等からタイヤ18の車両前後方向における接地長CLを精度よく求めることが可能となる。
また、タイヤ18の車両前後方向におけるタイヤ内側の接地長CLiとタイヤ外側の接地長CLoとを算出すると、作用力演算部101は、タイヤ18の車両前後方向におけるタイヤ内側の接地長CLiとタイヤ外側の接地長CLoとの平均値から、タイヤ18の接地面に作用する車輪上下方向における上下力Fzを求める。タイヤ18の車両前後方向における接地長CLiおよびCLoは、タイヤ18の接地面に作用する上下力Fzの大きさに応じて変化する。本実施形態では、上述のようにタイヤ18に対して加速度センサ26をタイヤ幅方向に2列にわたって設けてタイヤ18の横力を算出している。従って、接地長CLiおよびCLoが異なる場合があるが、接地長CLiおよびCLoの平均値を用いれば、タイヤ18の接地面に作用する車輪上下方向における上下力Fzを精度よく求めることが可能となる。本実施形態では、タイヤ内側の接地長CLiとタイヤ外側の接地長CLoとの平均値と、上下力Fzとの相関を規定するマップあるいは関数式が予め定められて記憶装置104に記憶されており、作用力演算部101は、当該マップあるいは関数式を用いて上下力Fzを取得する。このようなマップあるいは関数式は、基本的に、車両10の定常走行中)の操舵時を基準として作成される。このように、加速度センサ26は、車輪14に設けられ、車輪14に作用する力を検出する車輪側検出手段として機能する。
図6は、第1の実施形態に係る車両制御装置150の処理手順を示すフローチャートである。本フローチャートにおける処理は、車両のイグニッションキーがユーザによりオンにされ、ECU100へ電源が投入されたときに開始し、その後所定時間間隔毎に繰り返される。
ECU100は、全てのタイヤ18から検出結果を受信したか否かを判断する(S11)。全てのタイヤ18から検出結果を受信し検出結果を利用できる場合(S11のY)、作用力演算部101は、全てのタイヤ18において、加速度センサ26、増幅器27、および通信機28に異常が生じていないと判断し、受信された検出結果を利用して全てのタイヤ18の各々に作用する上下力Fzおよび横力Fxを算出する(S12)。
4つのタイヤ18のうち1つのタイヤ18から加速度センサ26の検出結果が受信できないため検出結果を利用できない場合(S11のN)、作用力演算部101は、加速度センサ26の検出結果が受信できないタイヤ18に設けられた加速度センサ26、増幅器27、および通信機28のいずれかに異常が生じたと判断し、その加速度センサ26の検出結果の利用を停止する。以下、加速度センサ26の検出結果の利用を停止したタイヤ18に作用する上下力をFz1、横力をFx1とする。また、検出結果を継続して利用する残り3つタイヤ18に作用する上下力Fzおよび横力Fxについて、加速度センサ26の検出結果の利用を停止したタイヤ18と前後同じ側且つ左右反対側のタイヤ18に作用する上下力をFz2、横力をFx2、加速度センサ26の検出結果の利用を停止したタイヤ18と前後反対側且つ左右同じ側のタイヤ18に作用する上下力をFz3、横力をFx3、加速度センサ26の検出結果の利用を停止したタイヤ18と前後反対側且つ左右反対側のタイヤ18の上下力をFz4、横力をFx4とする。
作用力演算部101は、まず、加速度センサ26の検出結果を継続して利用するタイヤ18に作用する上下力Fz2、Fz3、およびFz4を、受信した加速度センサ26の検出結果を利用して算出する。また、作用力演算部101は、加速度センサ26の検出結果を継続して利用するタイヤ18に作用する横力Fx2、Fx3、およびFx4を、受信した加速度センサ26の検出結果を利用して算出する(S15)。上下力Fz2及至Fz4、および横力Fx2及至Fx4が算出されると、作用力推定部102は、
Fz1=Fz2×Fz3/Fz4、
Fx1=Fx2×Fx3/Fx4
とすることによって、加速度センサ26の検出結果の利用を停止したタイヤ18に作用する上下力Fz1および横力Fx1を推定する(S16)。通常、車輪14の各々に作用する上下力Fzおよび横力Fxの比は通常、左前輪:右前輪=左後輪:右後輪の関係が成立する。このため、一つの車輪14の加速度センサ26の検出結果の利用を停止した場合でも、上記の式によって加速度センサ26の検出結果の利用を停止した車輪14に作用する上下力Fzおよび横力Fxを推定することが可能となる。このように簡易な演算によってタイヤ18の接地面に作用する上下力Fzおよび横力Fxを推定することができため、ECU100の設計およびECU100による制御の負担を軽減させることができる。
Fz1=Fz2×Fz3/Fz4、
Fx1=Fx2×Fx3/Fx4
とすることによって、加速度センサ26の検出結果の利用を停止したタイヤ18に作用する上下力Fz1および横力Fx1を推定する(S16)。通常、車輪14の各々に作用する上下力Fzおよび横力Fxの比は通常、左前輪:右前輪=左後輪:右後輪の関係が成立する。このため、一つの車輪14の加速度センサ26の検出結果の利用を停止した場合でも、上記の式によって加速度センサ26の検出結果の利用を停止した車輪14に作用する上下力Fzおよび横力Fxを推定することが可能となる。このように簡易な演算によってタイヤ18の接地面に作用する上下力Fzおよび横力Fxを推定することができため、ECU100の設計およびECU100による制御の負担を軽減させることができる。
例えば、図7に示すように、左前輪タイヤ18FLの加速度センサ26が故障したものと仮定する。この場合、左前輪タイヤ18FLの加速度センサ26の検出結果の利用を停止したことから、左前輪タイヤ18FLに作用する上下力をFz1、横力をFx1とする。また、左前輪タイヤ18FLと前後同じ側且つ左右反対側のタイヤは右前輪タイヤ18FRになるため、右前輪タイヤ18FRの上下力をFz2、横力をFx2とする。また、左前輪タイヤ18FLと前後反対側且つ左右同じ側のタイヤは左後輪タイヤ18RLになるため、左後輪タイヤ18RLに作用する上下力をFz3、横力をFx3とする。また、左前輪タイヤ18FLと前後反対側且つ左右反対側のタイヤは右後輪タイヤ18RRになるため、右後輪タイヤ18RRに作用する上下力をFz4、横力をFx4とする。
例えば、検出結果を継続して利用する右前輪タイヤ18FR、左後輪タイヤ18RL、および右後輪タイヤ18RRの各々の上下力が、Fz2が500kgf、Fz3が400kgf、およびFz4が400kgfであった場合、作用力推定部102は、加速度センサ26が故障したために検出結果が利用できない左前輪タイヤ18FLの上下力Fz1を、Fz1=(500kgf)×(400kgf)/(400kgf)=500kgfと推定する。また、たとえば検出結果を継続して利用する右前輪タイヤ18FR、左後輪タイヤ18RL、および右後輪タイヤ18RRの各々の上下力が、Fz2が500kgf、Fz3が500kgf、およびFz4が400kgfの場合、作用力推定部102は、加速度センサ26が故障したために検出結果が利用できない左前輪タイヤ18FLの上下力Fz1を、Fz1=(500kgf)×(400kgf)/(500kgf)=400kgfと推定する。
ECU100は、算出および推定された上下力Fzおよび横力Fxを利用して、車輪14の各々のホイールシリンダ圧を決定する(S13)。したがって、ECU100は、検出された上下力または横力、および推定された上下力または横力を利用して、各々の車輪に与えるべき制動力を決定する制動力決定手段として機能する。車輪14の各々のホイールシリンダ圧を決定すると、ECU100は、ECB−ECU200に決定したホイールシリンダ圧を示す情報を入力する。ECB−ECU200は入力された情報を参照し、決定されたホイールシリンダ圧を実現するよう、油圧アクチュエータにおける増圧用バルブまたは減圧用バルブへ供給する電流をデューティー制御によって制御して増圧用バルブまたは減圧用バルブの開弁および閉弁を制御する(S14)。したがって、ECB−ECU200は、決定された制動力を実現するよう、各々の車輪14の制動力を制御する制動制御手段として機能する。このようにホイールシリンダ圧が調整されることによって、車輪14の各々に設けられたブレーキ装置が車輪14に与える制動力が調整される。これによって、車輪に作用する力または加速度を利用して姿勢制御を実施するような車両において、いずれかの車輪の検出手段の検出結果の利用を停止した場合においても、車輪に作用する力または加速度を適切に推定することができるため、車両における安定した姿勢制御を実現することが可能となる。
なお、2つ以上のタイヤ18において、加速度センサ26の検出結果の利用を停止した場合、ECU100は、車輪に作用する力または加速度を利用して実施する姿勢制御を停止してもよい。この場合、ECU100は、車体12に設けられた、たとえばバネ上Gセンサ115などの加速度センサ、ヨーレートセンサ、または車輪速センサなどの車体側センサの出力値のみに基づいて姿勢制御を実施してもよい。
また、定常走行中においても、車両の荷重分布や積載状況などによって、左前輪タイヤ18FLに作用する力と右前輪タイヤ18FRに作用する力の比が、左後輪タイヤ18RLに作用する力と右後輪タイヤ18RRに作用する力の比が同一とならない場合がある。たとえば、左前輪タイヤ18FL、左後輪タイヤ18RL、および右後輪タイヤ18RRに作用する上下力がすべて400kgfで、右前輪タイヤ18FRに作用する上下力が420kgfとなる場合などである。
このような場合のために、作用力推定部102は、
Fz1=Kz×Fz2×Fz3/Fz4
となる係数Kz、または
Fx1=Kx×Fx2×Fx3/Fx4
となる係数Kxを予め保持することにより、加速度センサ26の検出結果の利用を停止したタイヤ18の上下力Fz1および横力Fx1を推定してもよい。このように係数を予め保持することにより、車輪に作用する力または加速度を精度良く推定することができる。この係数は、すべてのタイヤ18の加速度センサ26の検出結果を利用している状態において、車両10が平坦な路面を直進して定速走行しているときに、
Kz=Fz1×Fz4/(Fz2×Fz3)
Kx=Fx1×Fx4/(Fx2×Fx3)
とすることによって算出することができる。なお、作用力推定部102は、所定時間後毎にこの係数を取得してもよく、記憶装置104は取得された係数を保持してもよい。これによって、検知手段の検出結果の利用を停止した場合においても、その直前に取得した係数によって推定することができるため、例えば車両に積載する積載物またはその積載位置が変化したような場合でも、車輪に作用する力または加速度を精度良く推定することができる。
Fz1=Kz×Fz2×Fz3/Fz4
となる係数Kz、または
Fx1=Kx×Fx2×Fx3/Fx4
となる係数Kxを予め保持することにより、加速度センサ26の検出結果の利用を停止したタイヤ18の上下力Fz1および横力Fx1を推定してもよい。このように係数を予め保持することにより、車輪に作用する力または加速度を精度良く推定することができる。この係数は、すべてのタイヤ18の加速度センサ26の検出結果を利用している状態において、車両10が平坦な路面を直進して定速走行しているときに、
Kz=Fz1×Fz4/(Fz2×Fz3)
Kx=Fx1×Fx4/(Fx2×Fx3)
とすることによって算出することができる。なお、作用力推定部102は、所定時間後毎にこの係数を取得してもよく、記憶装置104は取得された係数を保持してもよい。これによって、検知手段の検出結果の利用を停止した場合においても、その直前に取得した係数によって推定することができるため、例えば車両に積載する積載物またはその積載位置が変化したような場合でも、車輪に作用する力または加速度を精度良く推定することができる。
(第2の実施形態)
図8は、第2の実施形態に係る車両制御装置150の処理手順を示すフローチャートである。車両制御装置150の構成は第1の実施形態と同様である。本フローチャートにおける処理は、車両のイグニッションキーがユーザによりオンにされてECU100へ電源が投入されたときに開始し、その後所定時間間隔毎に繰り返される。本フローチャートにおけるS41及至S44は、図6のS11及至S14と同様であるため説明を省略する。また、Fz1及至Fz4、およびFx1及至Fx4の定義は第1の実施形態と同様のものとする。
図8は、第2の実施形態に係る車両制御装置150の処理手順を示すフローチャートである。車両制御装置150の構成は第1の実施形態と同様である。本フローチャートにおける処理は、車両のイグニッションキーがユーザによりオンにされてECU100へ電源が投入されたときに開始し、その後所定時間間隔毎に繰り返される。本フローチャートにおけるS41及至S44は、図6のS11及至S14と同様であるため説明を省略する。また、Fz1及至Fz4、およびFx1及至Fx4の定義は第1の実施形態と同様のものとする。
4つのタイヤ18のうち1つのタイヤ18から検出結果を受信しない場合(S41のN)、作用力演算部101は、受信がされないタイヤ18に設けられた加速度センサ26、増幅器27、および通信機28のいずれかに異常が生じたと判断し、その加速度センサ26の検出結果の利用を停止する。この場合、作用力演算部101は、加速度センサ26の検出結果を継続して利用するタイヤ18の上下力Fz2、Fz3、およびFz4を、受信した加速度センサ26の加速度情報を利用して算出する。また、作用力演算部101は、加速度センサ26の検出結果を継続して利用するタイヤ18の横力Fx2、Fx3、およびFx4を、受信した加速度センサ26の加速度情報を利用して算出する(S45)。また、作用力推定部102は、4つの車輪14の各々に対して設けられた4つのサスペンションのうち、加速度センサ26の検出結果の利用を停止したタイヤ18の車輪14に対して設けられたサスペンションのストローク量Lsを算出し、
Fz1=Kz×Ls
Fx1=Kx×Ls
とすることによって、加速度センサ26の検出結果の利用を停止したタイヤ18に作用する上下力Fz1および横力Fx1を推定する(S46)。記憶装置104には、このような演算を実行するための係数Kzおよび係数Kxが予め格納されており、作用力推定部102は、このKzおよび係数Kxを参照して上下力Fz1および横力Fx1を推定する。なお、上下力Fz1および横力Fx1などタイヤ18に作用する力を推定するための式は上記の式に限られず、ストローク量Lsを利用した他の式によって推定されるものであってもよい。また、ストローク量Lsに応じた上下力Fz1および横力Fx1がマップ化されているものであってもよい。
Fz1=Kz×Ls
Fx1=Kx×Ls
とすることによって、加速度センサ26の検出結果の利用を停止したタイヤ18に作用する上下力Fz1および横力Fx1を推定する(S46)。記憶装置104には、このような演算を実行するための係数Kzおよび係数Kxが予め格納されており、作用力推定部102は、このKzおよび係数Kxを参照して上下力Fz1および横力Fx1を推定する。なお、上下力Fz1および横力Fx1などタイヤ18に作用する力を推定するための式は上記の式に限られず、ストローク量Lsを利用した他の式によって推定されるものであってもよい。また、ストローク量Lsに応じた上下力Fz1および横力Fx1がマップ化されているものであってもよい。
また、作用力推定部102は、ストロークセンサ114のストローク量Lsの代わりに、バネ上Gセンサ115の検出結果から車体12における上下方向の加速度Azを算出し、
Fz1=Kz×Az
Fx1=Kx×Az
とすることによって、加速度センサ26の検出結果の利用を停止したタイヤ18に作用する上下力Fz1および横力Fx1を推定してもよい。記憶装置104には、このような演算を実行するための係数Kzおよび係数Kxが予め格納されており、作用力推定部102は、この係数Kzおよび係数Kxを参照して上下力Fz1および横力Fx1を算出してもよい。なお、上下力Fz1および横力Fx1は、上記の式に限られず、加速度Azを利用した他の式によって算出されるものであってもよい。また、加速度Azに応じた上下力Fz1および横力Fx1がマップ化されているものであってもよい。
Fz1=Kz×Az
Fx1=Kx×Az
とすることによって、加速度センサ26の検出結果の利用を停止したタイヤ18に作用する上下力Fz1および横力Fx1を推定してもよい。記憶装置104には、このような演算を実行するための係数Kzおよび係数Kxが予め格納されており、作用力推定部102は、この係数Kzおよび係数Kxを参照して上下力Fz1および横力Fx1を算出してもよい。なお、上下力Fz1および横力Fx1は、上記の式に限られず、加速度Azを利用した他の式によって算出されるものであってもよい。また、加速度Azに応じた上下力Fz1および横力Fx1がマップ化されているものであってもよい。
本実施形態において、4つのタイヤ18のうち2つ以上のタイヤ18から検出結果を受信しない場合においても、作用力推定部102は、車体側検出手段の検出結果を利用して、加速度センサ26の検出結果を受信しないタイヤ18の各々に作用する力を推定する。なお、ECU100は、車輪に作用する力または加速度を利用して実施する姿勢制御を停止してもよいことは勿論である。
(第3の実施形態)
図9は、第3の実施形態に係る車両制御装置150の処理手順を示すフローチャートである。車両制御装置150の構成は前述の実施形態と同様である。本フローチャートにおける処理は、車両のイグニッションキーがユーザによりオンにされ、ECU100へ電源が投入されたときに開始し、その後所定時間間隔毎に繰り返される。本フローチャートにおけるS51及至S54は、図6のS11及至S14と同様であるため説明を省略する。また、Fz1及至Fz4、およびFx1及至Fx4の定義は前述の実施形態と同様のものとする。
図9は、第3の実施形態に係る車両制御装置150の処理手順を示すフローチャートである。車両制御装置150の構成は前述の実施形態と同様である。本フローチャートにおける処理は、車両のイグニッションキーがユーザによりオンにされ、ECU100へ電源が投入されたときに開始し、その後所定時間間隔毎に繰り返される。本フローチャートにおけるS51及至S54は、図6のS11及至S14と同様であるため説明を省略する。また、Fz1及至Fz4、およびFx1及至Fx4の定義は前述の実施形態と同様のものとする。
以下、加速度センサ26の検出結果の利用を停止したタイヤ18を含む車輪14に対して設けられたサスペンションのストローク量をLs1とする。また、加速度センサ26の検出結果の利用を停止したタイヤ18と前後同じ側且つ左右反対側のタイヤ18を含む車輪14に対して設けられたサスペンションのストローク量をLs2とし、前後反対側且つ左右同じ側のタイヤ18を含む車輪14に対して設けられたサスペンションのストローク量をLs3とし、前後反対側且つ左右反対側のタイヤ18を含む車輪14に対して設けられたサスペンションのストローク量をLs4とする。
4つのタイヤ18のうち1つのタイヤ18から検出結果を受信しない場合(S51のN)、作用力推定部102は、ストロークセンサ114の検出結果からサスペンションのストローク量Lsを算出し、
Fzn=Kz×Lsn
Fxn=Kx×Lsn
(n=1及至4)
とすることによって、全てのタイヤ18について、各々の接地面に作用する上下力Fzおよび横力Fxを推定する(S55)。ストローク量Lsは車輪14の上下力Fzおよび横力Fxと相関があるため、ストローク量Lsに係数を乗じることで上下力Fzおよび横力Fxを推定することができる。記憶装置104には、このような演算を実行するための係数Kzおよび係数Kxが予め格納されており、作用力推定部102は、この係数Kzおよび係数Kxを参照して全てのタイヤ18の各々の上下力Fzおよび横力Fxを算出する。なお、係数Kzおよび係数Kxは、車輪14ごとに異なる値とされていてもよい。またタイヤ18の上下力Fzおよび横力Fxなどタイヤ18に作用する力を推定するための式は上記の式に限られず、ストローク量Lsを利用した他の式によって算出されるものであってもよい。また、ストローク量Lsに応じて全てのタイヤ18の各々の上下力Fzおよび横力Fxがマップ化されていてもよい。
Fzn=Kz×Lsn
Fxn=Kx×Lsn
(n=1及至4)
とすることによって、全てのタイヤ18について、各々の接地面に作用する上下力Fzおよび横力Fxを推定する(S55)。ストローク量Lsは車輪14の上下力Fzおよび横力Fxと相関があるため、ストローク量Lsに係数を乗じることで上下力Fzおよび横力Fxを推定することができる。記憶装置104には、このような演算を実行するための係数Kzおよび係数Kxが予め格納されており、作用力推定部102は、この係数Kzおよび係数Kxを参照して全てのタイヤ18の各々の上下力Fzおよび横力Fxを算出する。なお、係数Kzおよび係数Kxは、車輪14ごとに異なる値とされていてもよい。またタイヤ18の上下力Fzおよび横力Fxなどタイヤ18に作用する力を推定するための式は上記の式に限られず、ストローク量Lsを利用した他の式によって算出されるものであってもよい。また、ストローク量Lsに応じて全てのタイヤ18の各々の上下力Fzおよび横力Fxがマップ化されていてもよい。
また、作用力推定部102は、ストロークセンサ114のストローク量Lsの代わりに、バネ上Gセンサ115の検出結果から車体12における上下方向の加速度Azを算出し、
Fzn=Kz×Azn
Fxn=Kx×Azn
(n=1及至4)
とすることによって、全てのタイヤ18について、各々の接地面に作用する上下力Fzおよび横力Fxを推定してもよい。記憶装置104には、係数Kzおよび係数Kxが予め格納されている点は上述と同様である。なお、全てのタイヤ18の各々の上下力Fzおよび横力Fxは、上記の式に限られず、加速度Azを利用した他の式によって算出されるものであってもよい。また、加速度Azに応じて全てのタイヤ18の各々の上下力Fzおよび横力Fxがマップ化されていてもよい。
Fzn=Kz×Azn
Fxn=Kx×Azn
(n=1及至4)
とすることによって、全てのタイヤ18について、各々の接地面に作用する上下力Fzおよび横力Fxを推定してもよい。記憶装置104には、係数Kzおよび係数Kxが予め格納されている点は上述と同様である。なお、全てのタイヤ18の各々の上下力Fzおよび横力Fxは、上記の式に限られず、加速度Azを利用した他の式によって算出されるものであってもよい。また、加速度Azに応じて全てのタイヤ18の各々の上下力Fzおよび横力Fxがマップ化されていてもよい。
このように本実施形態では、ECU100は、加速度センサ26またはその検出結果の通信経路に異常が発生した場合などにおいて、サスペンションのスロークセンサやバネ上Gセンサなどの車体側検出手段を有効に利用して、タイヤ18や車輪14に作用する力を推定する。また、ECU100は、タイヤ18の各々に作用する力の検出を、加速度センサ26または車体側検出手段のいずれか一方によって実施する。たとえば、あるタイヤ18に作用する力は車体側検出手段の検出結果を利用して推定し、他のタイヤ18に作用する力は加速度センサ26によって検出するなど、種類の異なる検出装置を使用すると、もともと検出対象が異なるため、力が変化するタイミングが異なったり、力の大きさが異なったりすることが発生する可能性がある。本実施形態によれば、種類の異なる検出装置を使用することによるこのような検出結果の相違を抑制することができる。
本実施形態において、4つのタイヤ18のうち2つ以上のタイヤ18から検出結果を受信しない場合においても、作用力推定部102は、車体側検出手段の検出結果を利用して、全てのタイヤ18の各々に作用する力を推定する。なお、ECU100は、車輪に作用する力または加速度を利用して実施する姿勢制御を停止してもよいことは勿論である。
なお、作用力推定部102は、いずれかの車輪14の加速度センサ26の検出結果の利用を停止した場合に、車体側検出手段の検出結果を利用して、複数の車輪14に作用する力を推定してもよい。たとえば、作用力推定部102は、1つの車輪14の加速度センサ26の検出結果の利用を停止した場合に、その車輪14と隣り合う車輪14の加速度センサ26の検出結果の利用を停止し、これら検出結果の利用を停止した車輪14に作用する力を、車体側検出手段の検出結果を利用して推定してもよい。これによって加速度センサ26の検出結果を利用する車輪14と、作用する力を推定する車輪14とのバランスをとることができる。このため、検出または推定された力を利用して実施される車両制御において、精度の良い安定した制御を実現することが可能となる。
(第4の実施形態)
図10は、第4の実施形態に係る車両制御装置150が搭載された車両10における車輪14の部分断面図である。本実施形態に係る車両制御装置150は前述の実施形態とほぼ同様の構成であるが、加速度センサ26の代わりにセンサユニット120を備える。
図10は、第4の実施形態に係る車両制御装置150が搭載された車両10における車輪14の部分断面図である。本実施形態に係る車両制御装置150は前述の実施形態とほぼ同様の構成であるが、加速度センサ26の代わりにセンサユニット120を備える。
センサユニット120は、タイヤ18のサイドウォール部182外面に取り付けられる。センサユニット120は、タイヤ18断面高さの中間高さ位置よりもタイヤ18の中心側に微小にずらして配置される。センサユニット120は、磁石とこの磁石に間隔を有して向き合う磁気センサ素子とを弾性部材を介して一体化したブロック状のモールド体として形成される。磁気センサ素子としてはホール素子などが採用され得る。サイドウォール部182の動きに追従して弾性変形するために、センサユニット120に設けられる弾性部材は、ゴム等によって形成される。
センサユニット120は、磁石と磁気センサ素子とを結ぶゲインが最大となる中央線を、タイヤ半径方向線に対して所定の角度で傾斜する向きで取り付けられ、サイドウォール部182の表面歪εのうちの剪断歪εγを検出することが可能となっている。このようにして検出された剪断歪εγは、タイヤ18の接地面に作用する横力Fx、前後力Fy、および上下力Fzの各々に対して線形の相関を示す。このため、剪断歪みεγを検出することによって横力Fx、前後力Fy、および上下力Fzを正確に検出することが可能となる。
センサユニット120は、サイドウォール部182の外面に対して、タイヤ周方向に複数配設されている。本実施形態では、タイヤ周方向において、22.5°間隔で合計8つのセンサユニット120がサイドウォール部182の外面に配置されている。センサユニット120は、それぞれ増幅器27を介して通信機28に接続されており、車輪14の各々には、これらの加速度センサ26、増幅器27および通信機28に電力を供給するバッテリ29が設けられている。本実施形態では、4つのセンサユニット120(および増幅器27)に対して1つの通信機28が割り当てられている。
4つのタイヤ18のうち1つのタイヤ18から検出結果を受信しない場合、作用力演算部101は、受信がされないタイヤ18に設けられたセンサユニット120、増幅器27、および通信機28のいずれかに異常が生じたと判断する。作用力演算部101は、前述の実施形態と同様に、センサユニット120の検出結果を継続して利用するタイヤ18の上下力Fz2、Fz3、およびFz4、横力Fx2、Fx3、およびFx4を算出するだけでなく、センサユニット120の検出結果を継続して利用するタイヤ18の前後力Fy2、Fy3、およびFy4を、受信されたセンサユニット120の検出結果を利用して算出する。作用力推定部102は、前述の実施形態と同様に上下力Fy1および横力Fx1を推定するだけでなく
Fy1=Fy2×Fy3/Fy4
とすることによって、センサユニット120の検出結果の利用を停止したタイヤ18に作用する前後力Fy1を推定する。上下力Fzおよび横力Fxと同様に、車輪14の各々に作用する前後力Fyの比は通常、左前輪:右前輪=左後輪:右後輪の関係が成立する。このため、一つの車輪14のセンサユニット120の検出結果の利用を停止した場合でも、上記の式によってセンサユニット120の検出結果の利用を停止した車輪14に作用する前後力Fyを推定することが可能となる。このように、本実施形態では、センサユニット120の検出結果の利用を停止したタイヤ18に作用する横力Fx1、前後力Fy1、および上下力Fz1のすべてを推定することができる。
Fy1=Fy2×Fy3/Fy4
とすることによって、センサユニット120の検出結果の利用を停止したタイヤ18に作用する前後力Fy1を推定する。上下力Fzおよび横力Fxと同様に、車輪14の各々に作用する前後力Fyの比は通常、左前輪:右前輪=左後輪:右後輪の関係が成立する。このため、一つの車輪14のセンサユニット120の検出結果の利用を停止した場合でも、上記の式によってセンサユニット120の検出結果の利用を停止した車輪14に作用する前後力Fyを推定することが可能となる。このように、本実施形態では、センサユニット120の検出結果の利用を停止したタイヤ18に作用する横力Fx1、前後力Fy1、および上下力Fz1のすべてを推定することができる。
なお、本実施形態において、受信されたセンサユニット120の検出結果を利用する代わりに、第2の実施形態と同様に、車体側検出手段の検出結果を利用して、センサユニット120の検出結果の利用を停止したタイヤ18に作用する力を推定してもよいことは勿論である。また、第3の実施形態と同様に、車体側検出手段の検出結果を利用して、複数または全ての車輪14に作用する力を推定してもよいことは勿論である。
本発明は上述の実施形態に限定されるものではなく、本実施形態の各要素を適宜組み合わせたものも、本発明の実施形態として有効である。また、当業者の知識に基づいて各種の設計変更等の変形を本実施形態に対して加えることも可能であり、そのような変形が加えられた実施形態も本発明の範囲に含まれうる。以下、そうした例をあげる。
前述の実施形態の加速度センサ26またはセンサユニット120の代わりに、車輪14またはタイヤ18に加速度を検出する加速度センサが配置されていてもよい。車両制御装置150は、前述の実施形態のように車輪14に作用する力の代わりに、車輪14に作用する加速度を利用して、車輪14の各々の制動力を制御するなど、車両10の姿勢を制御してもよい。これによって、車輪14に作用する加速度を利用して車両10の姿勢を制御する車両制御装置150においても、加速度センサの検出結果の利用を停止した車輪14に作用する加速度を推定することが可能となる。このような加速度センサは、タイヤ空気圧検出装置などと共に設けられてもよく、このタイヤ空気圧検出装置による検出結果を車体12へ送信する通信機を利用して、加速度センサによる検出結果を車体12へ送信してもよい。
作用力推定部102は、4つの車輪14のうち、1つの車輪14の加速度センサ26の検出結果の利用を停止した場合に、他の1つの車輪14の加速度センサ26の検出結果を利用して、加速度センサ26の検出結果の利用を停止した車輪14に作用する力または加速度を推定してもよい。たとえば、車両が定速で走行している場合には、車両が旋回中であっても前輪と後輪は定常状態と略同一の比によって力または加速度が作用すると考えられる。同様に、車両が直進状態の場合には、車速が増加または減少中であっても右輪と左輪は定常状態と略同一の比によって力または加速度が作用すると考えられる。このため、他の1つの車輪14の加速度センサ26の検出結果を利用して、加速度センサ26の検出結果の利用を停止した車輪14に作用する力または加速度を推定することが可能となる。この場合、作用力推定部102は、検出結果の利用を停止した車輪14と隣り合う車輪14の加速度センサ26の検出結果を利用して、検出結果の利用を停止した車輪14に作用する力または加速度を推定してもよい。
また、作用力推定部102は、4つの車輪14のうち、1つの車輪14の加速度センサ26の検出結果の利用を停止した場合に、他の2つの車輪14の加速度センサ26の検出結果を利用して、加速度センサ26の検出結果の利用を停止した車輪14に作用する力または加速度を推定してもよい。これにより、他の1つの車輪14の加速度センサ26の検出結果を利用する場合と比べて高い精度で車輪14に作用する力または加速度を推定することができる。
作用力推定部102は、加速度センサ26の検出結果が受信されないため利用できない場合だけでなく、所定の場合には加速度センサ26の検出結果が利用可能な場合であっても、いずれかの車輪14の加速度センサ26の検出結果の利用を停止してもよい。このような場合においても、作用力推定部102は、他の車輪14の加速度センサ26の検出結果を利用して、加速度センサ26の検出結果の利用を停止した車輪14に作用する力または加速度を推定してもよい。
例えば、加速度センサ26の検出結果を受信することができるが、加速度センサ26の検出精度の観点から加速度センサ26の検出結果を利用すべきでない場合や、加速度センサ26の検出結果に異常が見られるため、加速度センサ26の検出結果を利用すべきでない場合があると考えられる。この場合、ECU100は、加速度センサ26の検出結果を利用して加速度センサ26に異常があるか否かを判断してもよい。この場合、ECU100は加速度センサ26の異常検出手段として機能する。ECU100は、例えば車両10が定速走行中または停止中において、加速度センサ26の検出結果が異常か否かを判断することにより、加速度センサ26に異常があるか否かを判断してもよい。加速度センサ26の検出結果が異常か否かは、加速度センサ26が故障したときの検出結果として前もって実験により明らかにされており、加速度センサ26が異常と判断される所定の検出結果の値は記憶装置104に格納されていればよい。また、例えば車両10が定速走行中または停止中において加速度センサ26の検出結果を車輪14の各々の間で比較することによって、加速度センサ26に異常があるか否かを判断してもよい。また、加速度センサ26は、異常が生じた場合に所定の信号を出力し、または異常が生じた場合に所定の信号の出力を停止するよう加速度センサ26内部の回路が構成されていてもよい。ECU100は、加速度センサ26からこの信号が入力されたか否かを判断することによって、加速度センサ26に異常が生じたか否かを判断してもよい。これによって、加速度センサ26に異常が生じて検出結果を取得できない、または取得された検出結果の精度が充分な精度を有していない可能性がある場合には、ECU100は、加速度センサ26の検出結果の利用を停止することができる。
また、作用力推定部102は、加速度センサ26に異常があるか否かにかかわらず、所定の条件にしたがって加速度センサ26の検出結果の利用を停止するか否かを判断してもよい。この場合、作用力推定部102は加速度センサ26の利用可能性判定部として機能する。たとえば車輪14に設置された加速度センサ26の製造後の経過期間が所定期間以上である場合には、加速度センサ26の検出結果の精度が低下する可能性がある場合が考えられる。作用力推定部102は、加速度センサ26の製造後の経過期間が所定期間以上である場合に、加速度センサ26に異常があるか否かにかかわらずこのような加速度センサ26の検出結果の利用を停止してもよい。
エンジンECUは、検出された車輪に作用する力または加速度および推定された車輪に作用する力または加速度を利用して、エンジントルクを決定してもよい。エンジンへの吸気量を制御するためのスロットル弁と、このスロットル弁の開口を制御するスロットル弁開口制御手段としてのスロットル弁モータを備える車両において、エンジンECUは、検出された車輪に作用する力または加速度および推定された車輪に作用する力または加速度を利用して、スロットル弁モータの作動を制御することにより、スロットル弁の開口を制御し、エンジントルクを制御してもよい。また、エンジンへの燃料供給量を制御するインジェクション制御手段を備える車両において、エンジンECUは、検出された車輪に作用する力または加速度および推定された車輪に作用する力または加速度を利用して、インジェクション制御手段を制御することによりエンジンへの燃料供給量を制御し、エンジントルクを制御してもよい。このようにエンジントルクを制御することによって、車輪14を駆動する駆動力を制御することができる。したがって、ECU100は、検出された力または加速度、もしくは推定された力または加速度を利用して、車輪を駆動する駆動力を決定する駆動力決定手段として機能する。また、エンジンECUは、決定された駆動力を実現するよう車輪14を駆動する駆動力を制御する駆動制御手段として機能する。
例えば、ステアリングホイールに連結される入力軸と、軸方向に推進することにより車輪を転舵する操舵軸に、ステアリングギヤを介して連結される出力軸と、入力軸の回転角度に対する出力軸の回転角度を変化させる伝達比可変手段と、を備える車両において、転舵ECUは、検出された車輪に作用する力または加速度および推定された車輪に作用する力または加速度を利用して伝達比可変手段を制御し、入力軸の回転角度に対する出力軸の回転角度を変化させてもよい。
4つの車輪の各々を独立に転舵可能な車両において、各々の車輪の転舵角度を制御する転舵ECUは、車輪に作用する力または加速度であって、検出された車輪に作用する力または加速度および推定された車輪に作用する力または加速度を利用して4輪の各々の転舵角度を決定してもよい。これによって、車輪に作用する力または加速度を利用して4輪を独立に転舵するよう制御する車輪転舵制御装置を有する車両において、一部の車輪の検出手段による検出結果が利用できない場合にも、これを推定することによって4輪を独立に制御することができる。
4つの車輪の各々に車輪駆動手段としての車輪駆動モータを備え、各々の車輪を独立に駆動することが可能な車両において、ECU100は、各々の車輪における、検出された車輪に作用する力または加速度および推定された車輪に作用する力または加速度を利用して、車輪の各々に与える駆動トルクを決定してもよい。ECU100は、決定した駆動トルクで車輪の各々を駆動するよう車輪駆動モータを制御してもよい。したがって、ECU100は、検出された力または加速度、もしくは推定された力または加速度を利用して、車輪を駆動する駆動力を決定する駆動力決定手段として機能する。また、エンジンECUは、決定された駆動力を実現するよう車輪14を駆動する駆動力を制御する駆動制御手段として機能する。
10 車両、 12 車体、 14 車輪、 18 タイヤ、 26 加速度センサ、 100 ECU、 101 作用力演算部、 102 作用力推定部、 104 記憶装置、 114 ストロークセンサ、 115 バネ上Gセンサ、 120 センサユニット、 150 車両制御装置、 200 ECB−ECU。
Claims (13)
- 車両に装着された車輪に作用する力または加速度を推定する車輪状態推定装置であって、
車輪に作用する力または加速度を検出する車輪側検出手段が設けられた複数の車輪のうち、いずれかの車輪の車輪側検出手段の検出結果の利用を停止した場合に、他の車輪の車輪側検出手段の検出結果を利用して、車輪側検出手段の検出結果の利用を停止した車輪に作用する力または加速度を推定する推定手段を備えることを特徴とする車輪状態推定装置。 - 前記車輪側検出手段は、車両に設置された4つの車輪の各々に設けられ、
前記推定手段は、4つの車輪のうち、1つの車輪の車輪側検出手段の検出結果の利用を停止した場合に、他の3つの車輪の車輪側検出手段の検出結果を利用して、車輪側検出手段の検出結果の利用を停止した車輪に作用する力または加速度を推定することを特徴とする請求項1に記載の車輪状態推定装置。 - 車輪側検出手段の検出結果の利用を停止した車輪に作用する力または加速度をS1、
車輪側検出手段の検出結果の利用を停止した車輪と前後同じ側且つ左右反対側の車輪に作用する力または加速度をS2、
車輪側検出手段の検出結果の利用を停止した車輪と前後反対側且つ左右同じ側の車輪に作用する力または加速度をS3、
車輪側検出手段の検出結果の利用を停止した車輪と前後反対側且つ左右反対側の車輪に作用する力または加速度をS4とした場合に、
前記推定手段は、前記車輪側検出手段により検出されたS2、S3、およびS4を、
S1=S2×S3/S4
とすることによりS1を推定することを特徴とする請求項2に記載の車輪状態推定装置。 - 車輪に作用する力または加速度を検出する車輪側検出手段が各々に設けられた複数の車輪のうち、いずれかの車輪の車輪側検出手段の検出結果の利用を停止した場合に、他の車輪の車輪側検出手段の検出結果を利用して、車輪側検出手段の検出結果の利用を停止した車輪に作用する力または加速度を推定する推定手段と、
検出された力または加速度、もしくは推定された力または加速度を利用して、各々の車輪に与えるべき制動力を決定する制動力決定手段と、
決定された制動力を実現するよう、各々の車輪の制動力を制御する制動制御手段と、
を備えることを特徴とする車両制御装置。 - 車輪に作用する力または加速度を検出する車輪側検出手段が各々に設けられた複数の車輪のうち、いずれかの車輪の車輪側検出手段の検出結果の利用を停止した場合に、他の車輪の車輪側検出手段の検出結果を利用して、車輪側検出手段の検出結果の利用を停止した車輪に作用する力または加速度を推定する推定手段と、
検出された力または加速度、もしくは推定された力または加速度を利用して、車輪を駆動する駆動力を決定する駆動力決定手段と、
決定された駆動力を実現するよう車輪を駆動する駆動力を制御する駆動制御手段と、
を備えることを特徴とする車両制御装置。 - 車輪に作用する力または加速度を推定する車輪状態推定装置であって、
車輪に作用する力または加速度を検出する車輪側検出手段が各々に設けられた複数の車輪のうち、いずれかの車輪の車輪側検出手段の検出結果の利用を停止した場合に、車体に作用する力または加速度を検出する車体側検出手段の検出結果を利用して、車輪側検出手段の検出結果の利用を停止した車輪に作用する力または加速度を推定する推定手段を備えることを特徴とする車輪状態推定装置。 - 前記推定手段は、車輪に作用する力または加速度を検出する車輪側検出手段が各々に設けられた複数の車輪のうち、いずれかの車輪の車輪側検出手段の検出結果の利用を停止した場合に、車輪と車体とに介在するサスペンションの各々に対応して設けられサスペンションのストローク量を検出するストローク量検出手段の検出結果を利用して、車輪側検出手段の検出結果の利用を停止した車輪に作用する力または加速度を推定することを特徴とする請求項6に記載の車輪状態推定装置。
- 車輪に作用する力または加速度を検出する車輪側検出手段が各々に設けられた複数の車輪のうち、いずれかの車輪の車輪側検出手段の検出結果の利用を停止した場合に、車体に作用する力または加速度を検出する車体側検出手段の検出結果を利用して、車輪側検出手段の検出結果の利用を停止した車輪に作用する力または加速度を推定する推定手段と、
検出された力または加速度、もしくは推定された力または加速度を利用して、各々の車輪に与えるべき制動力を決定する制動力決定手段と、
決定された制動力を実現するよう、各々の車輪の制動力を制御する制動制御手段と、
を備えることを特徴とする車両制御装置。 - 車輪に作用する力または加速度を検出する車輪側検出手段が各々に設けられた複数の車輪のうち、いずれかの車輪の車輪側検出手段の検出結果の利用を停止した場合に、車体に作用する力または加速度を検出する車体側検出手段の検出結果を利用して、車輪側検出手段の検出結果の利用を停止した車輪に作用する力または加速度を推定する推定手段と、
検出された力または加速度、もしくは推定された力または加速度を利用して、車輪を駆動する駆動力を決定する駆動力決定手段と、
決定された駆動力を実現するよう車輪を駆動する駆動力を制御する駆動制御手段と、
を備えることを特徴とする車両制御装置。 - 車輪に作用する力または加速度を推定する車輪状態推定装置であって、
車輪に作用する力または加速度を検出する車輪側検出手段が各々に設けられた複数の車輪のうち、いずれかの車輪の車輪側検出手段の検出結果の利用を停止した場合に、車体に作用する力または加速度を検出する車体側検出手段の検出結果を利用して、複数の車輪に作用する力または加速度を推定する推定手段を備えることを特徴とする車輪状態推定装置。 - 前記推定手段は、車輪に作用する力または加速度を検出する車輪側検出手段が各々に設けられた複数の車輪のうち、いずれかの車輪の車輪側検出手段の検出結果の利用を停止した場合に、車輪と車体との間に介在するサスペンションの各々に対応して設けられサスペンションのストローク量を検出するストローク量検出手段の検出結果を利用して、複数の車輪に作用する力または加速度を推定することを特徴とする請求項10に記載の車輪状態推定装置。
- 車輪に作用する力または加速度を検出する車輪側検出手段が各々に設けられた複数の車輪のうち、いずれかの車輪の車輪側検出手段の検出結果の利用を停止した場合に、車体に作用する力および加速度を検出する車体状態検出手段の検出結果を利用して、複数の車輪に作用する力または加速度を推定する推定手段と、
推定された力または加速度を利用して、各々の車輪に与えるべき制動力を決定する制動力決定手段と、
決定された制動力を実現するように各々の車輪の制動力を制御する制動制御手段と、
を備えることを特徴とする車両制御装置。 - 車輪に作用する力または加速度を検出する車輪側検出手段が各々に設けられた複数の車輪のうち、いずれかの車輪の車輪側検出手段の検出結果の利用を停止した場合に、車体に作用する力および加速度を検出する車体状態検出手段の検出結果を利用して、複数の車輪に作用する力または加速度を推定する推定手段と、
推定された力または加速度を利用して、車輪を駆動する駆動力を決定する駆動力決定手段と、
決定された駆動力を実現するように車輪を駆動する駆動力を制御する駆動制御手段と、
を備えることを特徴とする車両制御装置。
Priority Applications (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2005344722A JP2007147520A (ja) | 2005-11-29 | 2005-11-29 | 車輪状態推定装置および車両制御装置 |
| PCT/JP2006/323873 WO2007063926A1 (en) | 2005-11-29 | 2006-11-22 | Wheel-state estimation device and vehicle control device |
| CNA2006800446872A CN101316747A (zh) | 2005-11-29 | 2006-11-22 | 车轮状态估计装置以及车辆控制装置 |
| US12/067,870 US20090276113A1 (en) | 2005-11-29 | 2006-11-22 | Wheel-state estimation device and vehicle control device |
| EP06833676A EP1954539A1 (en) | 2005-11-29 | 2006-11-22 | Wheel-state estimation device and vehicle control device |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2005344722A JP2007147520A (ja) | 2005-11-29 | 2005-11-29 | 車輪状態推定装置および車両制御装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2007147520A true JP2007147520A (ja) | 2007-06-14 |
Family
ID=37709545
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2005344722A Pending JP2007147520A (ja) | 2005-11-29 | 2005-11-29 | 車輪状態推定装置および車両制御装置 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US20090276113A1 (ja) |
| EP (1) | EP1954539A1 (ja) |
| JP (1) | JP2007147520A (ja) |
| CN (1) | CN101316747A (ja) |
| WO (1) | WO2007063926A1 (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP1998265A1 (en) | 2007-06-01 | 2008-12-03 | Inventure Inc. | Method for designing LSI (Large Scale Integration) system and design support device for LSI system |
| JP2010066261A (ja) * | 2008-09-08 | 2010-03-25 | Continental Automotive Gmbh | 車輪荷重を検出するための方法および測定システム |
Families Citing this family (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2010011615A2 (en) | 2008-07-20 | 2010-01-28 | Southern Research Institute | A direct contact force measurement system |
| DE102008041608B4 (de) * | 2008-08-27 | 2021-08-12 | Robert Bosch Gmbh | Verfahren zur Detektion von Beschleunigungspeaks in Reifen |
| JP6036633B2 (ja) * | 2013-10-07 | 2016-11-30 | 株式会社デンソー | エンジン制御装置 |
| JP6547065B2 (ja) * | 2016-04-06 | 2019-07-17 | ヤマハ発動機株式会社 | 姿勢推定装置及び輸送機器 |
| JP6823664B2 (ja) | 2016-10-19 | 2021-02-03 | 川崎重工業株式会社 | タイヤ力推定装置およびタイヤ力推定方法 |
| CN110573355B (zh) * | 2017-04-28 | 2022-12-09 | 亨德里克森美国有限责任公司 | 用于重型车辆的基于负荷的轮胎充气系统 |
| JP6915507B2 (ja) * | 2017-11-23 | 2021-08-04 | 株式会社デンソー | 路面状態判別装置 |
Family Cites Families (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| GB9320821D0 (en) * | 1993-10-09 | 1993-12-01 | Sumitomo Rubber Ind | Method of setecting a deflated tyre on a vehicle |
| US20030058118A1 (en) * | 2001-05-15 | 2003-03-27 | Wilson Kitchener C. | Vehicle and vehicle tire monitoring system, apparatus and method |
| JP4114044B2 (ja) * | 2001-07-17 | 2008-07-09 | トヨタ自動車株式会社 | タイヤ作用力検出装置 |
| JP3997864B2 (ja) * | 2002-08-14 | 2007-10-24 | トヨタ自動車株式会社 | 車輪状態取得装置および車両状態取得装置 |
| DE10307191A1 (de) * | 2003-02-20 | 2004-09-02 | Continental Aktiengesellschaft | Verfahren zur Bestimmung von auf einen Luftreifen wirkenden Kräften |
| JP4349151B2 (ja) * | 2004-02-26 | 2009-10-21 | トヨタ自動車株式会社 | 接触状態取得装置 |
-
2005
- 2005-11-29 JP JP2005344722A patent/JP2007147520A/ja active Pending
-
2006
- 2006-11-22 CN CNA2006800446872A patent/CN101316747A/zh active Pending
- 2006-11-22 WO PCT/JP2006/323873 patent/WO2007063926A1/en active Application Filing
- 2006-11-22 EP EP06833676A patent/EP1954539A1/en not_active Withdrawn
- 2006-11-22 US US12/067,870 patent/US20090276113A1/en not_active Abandoned
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP1998265A1 (en) | 2007-06-01 | 2008-12-03 | Inventure Inc. | Method for designing LSI (Large Scale Integration) system and design support device for LSI system |
| JP2010066261A (ja) * | 2008-09-08 | 2010-03-25 | Continental Automotive Gmbh | 車輪荷重を検出するための方法および測定システム |
Also Published As
| Publication number | Publication date |
|---|---|
| EP1954539A1 (en) | 2008-08-13 |
| WO2007063926A1 (en) | 2007-06-07 |
| US20090276113A1 (en) | 2009-11-05 |
| CN101316747A (zh) | 2008-12-03 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2007147520A (ja) | 車輪状態推定装置および車両制御装置 | |
| JP2007168671A (ja) | タイヤダメージ判定装置 | |
| US7248953B2 (en) | Wheel-state obtaining apparatus, and vehicle-state obtaining apparatus | |
| US6954691B2 (en) | Method for determining the dynamics of vehicle movement | |
| CN100471708C (zh) | 车辆高度控制悬吊设备及其车辆高度控制方法 | |
| US7797093B2 (en) | Wheel ground-contact state judging device and method | |
| US6862512B2 (en) | Method and system for controlling the performance of a motor vehicle | |
| US7617036B2 (en) | Method and system for determining the velocity of an automobile | |
| US20090012688A1 (en) | Road surface condition detection system, active suspension system, anti-lock brake system, and sensor unit therefor | |
| JP2007131301A (ja) | 横転傾向にある車両を安定化させる方法 | |
| WO2003093081A1 (en) | Vehicle stability control enhancement using tire force characteristics | |
| CN1784327A (zh) | 应用轮胎信息时对行驶动力学的调节进行优化 | |
| JP4703817B2 (ja) | 路面摩擦係数の推定方法と路面摩擦係数推定装置、路面状態の推定方法と路面状態推定装置、及び、路面滑り警告装置 | |
| US20150224978A1 (en) | Braking/driving force control device | |
| JP2007106243A (ja) | タイヤ情報取得装置およびタイヤ情報取得方法 | |
| JP4816181B2 (ja) | タイヤ状態処理装置 | |
| JP2008149967A (ja) | 車輪情報取得装置および車両制御装置 | |
| KR101228291B1 (ko) | 인텔리전트 타이어 모니터링 시스템 | |
| JP2006007865A (ja) | 車両制御装置 | |
| US20060228063A1 (en) | Sensor apparatus and rolling bearing apparatus with sensor | |
| JP4619870B2 (ja) | アライメント状態検出装置 | |
| JP5089558B2 (ja) | 路面摩擦係数推定装置 | |
| KR100880110B1 (ko) | 액티브 지오메트리 제어 현가장치의 고장 검출 방법 | |
| JP2007106324A (ja) | 車輪情報処理装置および車輪情報処理方法 | |
| JP2017136896A (ja) | 液圧センサオフセット補正方法及び車両用制御装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20090818 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20091215 |