JP2007144530A - Robot hand - Google Patents
Robot hand Download PDFInfo
- Publication number
- JP2007144530A JP2007144530A JP2005339121A JP2005339121A JP2007144530A JP 2007144530 A JP2007144530 A JP 2007144530A JP 2005339121 A JP2005339121 A JP 2005339121A JP 2005339121 A JP2005339121 A JP 2005339121A JP 2007144530 A JP2007144530 A JP 2007144530A
- Authority
- JP
- Japan
- Prior art keywords
- robot hand
- gate portion
- gate
- gripping
- clamper
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images


Landscapes
- Manipulator (AREA)
Abstract
Description
本発明は、ダイカスト成型等において、金型の合わせ面に露出している成型品の湯口部分を把持して取り出す際に用いられるロボットハンドに関する。 The present invention relates to a robot hand used when holding and taking out a gate portion of a molded product exposed on a mating surface of a mold in die casting molding or the like.
ダイカスト成型等においては、固定金型と可動金型とが合わさってキャビティを形成し、成型後は可動金型が退避して、固定金型の合わせ面に突出した成型品の湯口部分を、ロボットアームに備えたロボットハンドで取り出す手順となる。このロボットハンドとしては、ロボットアームの先端に連結したベースに、エア駆動等で開閉作動する一対のクランパを備えたものが知られている。この場合、成型品に対するロボットハンドのクランパの位置決めを正確に行うために、本件出願人は、クランパベースに、クランパの先端よりも僅かに前方へ突出する当接部材を設けて、取り出しの際には当接部材が固定金型の合わせ面に当接してクランパによる確実な把持を可能とした考案を既に提供している(特許文献1参照)。 In die casting, etc., a fixed mold and a movable mold are combined to form a cavity. After molding, the movable mold is retracted, and the gate of the molded product protruding from the mating surface of the fixed mold is The procedure is to take out with the robot hand equipped on the arm. As this robot hand, there is known a robot hand provided with a pair of clampers that are opened and closed by air drive or the like on a base connected to the tip of a robot arm. In this case, in order to accurately position the clamper of the robot hand with respect to the molded product, the applicant of the present application is provided with a contact member protruding slightly forward from the tip of the clamper on the clamper base. Has already provided a device in which the abutting member comes into contact with the mating surface of the fixed mold and can be securely held by the clamper (see Patent Document 1).
しかし、特許文献1では、固定金型の合わせ面を基準に位置決めを行うものであるから、湯口部分が同じでも金型の形状が変わると当接部材を交換したり、突出位置を変更したりする手間(段取り替え)が生じ、作業効率の低下を招く。
一方、湯口部分を直接把持するクランパにおいては、前端に平面鋭角状の把持爪を互いの対向側に突設し、その把持爪で湯口部分を把持させるものがあるが、この把持爪の先端が把持とその解除との繰り返しによって欠けやすく、このため把持爪やクランパの交換頻度が多くなってここでも作業効率の低下に繋がっている。
However, in
On the other hand, in a clamper that directly grips the gate portion, there is a clamper that has a flat acute angle gripping claw at the front end and protrudes to the opposite side and grips the gate portion with the gripping claw. Repeated gripping and release thereof tend to cause chipping, which increases the frequency of replacement of gripping claws and clampers, which again leads to a reduction in work efficiency.
そこで、本発明は、湯口部分に対してクランパの把持爪を常に正確に位置決めできると共に、クランパの耐久性も向上して、効率の良い取り出し作業に寄与できるロボットハンドを提供することを目的としたものである。 Therefore, the present invention has an object to provide a robot hand that can always accurately position a gripper claw of a clamper with respect to a gate portion and improve the durability of the clamper and contribute to an efficient take-out operation. Is.
上記目的を達成するために、請求項1に記載の発明は、把持爪の先端に、湯口部分への当接部の平面角が略90度若しくはそれ以上となるように面取部を形成する一方、ベースに、湯口部分の周面に当接して把持爪による湯口部分の把持位置を位置決めする位置決め部材を設けたことを特徴とするものである。
請求項2に記載の発明は、請求項1の目的に加えて、湯口部分が横断面円形のものにあって、湯口部分に対する位置決め部材の当接位置を一定にするために、位置決め部材における湯口部分への当接部分を平面V字状としたものである。
In order to achieve the above object, according to the first aspect of the present invention, the chamfered portion is formed at the tip of the gripping claw so that the plane angle of the abutting portion to the gate portion is approximately 90 degrees or more. On the other hand, the base is provided with a positioning member that contacts the peripheral surface of the gate and positions the grip position of the gate by the gripping claw.
According to a second aspect of the present invention, in addition to the object of the first aspect, the pouring gate portion has a circular cross section, and the pouring gate of the positioning member is made constant so that the contact position of the positioning member with respect to the pouring gate portion is constant. The abutting portion to the portion is a flat V-shape.
請求項1に記載の発明によれば、面取部により把持爪の強度がアップして欠け等が効果的に防止できるため、クランパの耐久性が向上し、交換頻度が減少する。また、湯口部分が位置決めの基準となることで、金型が変わっても湯口部分の把持位置は変化しないため、段取り替えも不要となる。よって、作業効率の向上が期待できる。
請求項2に記載の発明によれば、請求項1の効果に加えて、湯口部分への位置決め部材の当接位置を常に一定にでき、当接時のがたつきも防止できる好適な位置決め作用が得られる。
According to the first aspect of the present invention, since the strength of the gripping claw is increased by the chamfered portion and chipping and the like can be effectively prevented, the durability of the clamper is improved and the replacement frequency is reduced. In addition, since the pouring gate portion serves as a positioning reference, the holding position of the pouring gate portion does not change even if the mold is changed, so that the setup change is not necessary. Therefore, improvement in work efficiency can be expected.
According to the second aspect of the present invention, in addition to the effect of the first aspect, it is possible to make the contact position of the positioning member to the gate part always constant and to prevent the rattling at the time of contact. Is obtained.
以下、本発明の実施の形態を図面に基づいて説明する。
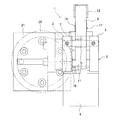
図1は、本発明のロボットハンドの平面図、図2はその左側面図で、ロボットハンド1は、上下一対の支持板3,3からなるベース2の後方(図1,2の上側を前方として説明する。)に、エアシリンダ4を連結し、支持板3,3間に左右一対のクランパ6,6を備える。このロボットハンド1は、例えば水平旋回可能に設置されたベース部と、そのベース部に設けられた多関節の可動アームとを備える周知のロボットアームにおいて、可動アームの先端部20に連結アーム21を介してベース2が連結されることで一体化される。エアシリンダ4への駆動用エアの供給制御は、ロボットアームに搭載されたエアポンプ及び切換弁の動作によってなされる。
Hereinafter, embodiments of the present invention will be described with reference to the drawings.
FIG. 1 is a plan view of a robot hand according to the present invention, FIG. 2 is a left side view thereof, and the
各クランパ6は、支持板3,3間の前方外側に配置されたピン7により支持板3,3間で左右へ揺動可能に軸着され、クランパ6の後端は、エアシリンダ4のロッド5に固着した連結プレート8にピン9によって連結されるリンク10に、同じくピン11によって軸着されている。よって、クランパ6,6は、ロッド5が前進すると、図1の二点鎖線で示すように、リンク10,10を介して後端がベース2の中心側へ回転し、両クランパ6,6の前端間を広げる開作動を行い、ロッド5が後退すると、同図に実線で示すように、リンク10,10を介して後端がベース2の外側へ回転し、両クランパ6,6の前端間を狭める閉作動を行うことになる。
Each
そして、各クランパ6の前端には、把持爪12が固定されている。この把持爪12は、クランパ6,6の互いの対向側へ向けて突設され、クランパ6,6の閉作動状態で前方へ正対する前面13と、その前面13の内側端から後方へ行くに従って徐々に中心側から離れる傾斜面14とを含む平面鋭角状を呈している。但し、把持爪12の先端には、図3にも示すように、前面13から傾斜面14にかけて斜めに微少な面取部15が形成されて、面取部15と傾斜面14とがなす平面角θが略90度となる当接部16を形成している。
A gripping
一方、クランパ6,6の間でベース2の前面には、位置決め部材17が設けられている。この位置決め部材17は、前面がベース2の中心側へ行くに従って徐々に後退する傾斜面となる一対の当接体18,18を突設することで、両当接体18,18により、断面円形の成型品の湯口部分22の周面にがたつきなく当接できる平面V字状の受部19を形成している。この受部19の湯口部分22への当接状態で、クランパ6,6の把持爪12による湯口部分22の把持位置が決定されることになる。
On the other hand, a
以上の如く構成されたロボットハンド1においては、成型後にダイカスト成型装置の可動金型が開いて退避したら、ロボットアームの動作によってロボットハンド1を、エアシリンダ4のロッド5を前進させてクランパ6,6を開作動させた状態で、固定金型の合わせ面23に半分が露出している成型品の湯口部分22に合わせて固定金型側へ前進させる。すると、位置決め部材17の受部19が湯口部分22の周面に当接してロボットハンド1の前進が停止する。このとき、V字状の受部19の案内によって湯口部分22の中心とロボットハンド1の中心とが正確に合わされる。この状態でエアシリンダ4のロッド5を後退させてクランパ6,6を閉作動させると、図1の実線に示す如く、把持爪12,12の当接部16,16が湯口部分22における合わせ面23近くの周面に当接して湯口部分22を把持する。
その後、固定金型に設けた図示しない押し出しピンを突出させて成型品を押し出すと共に、ロボットアームを後退させることで、成型品を取り出すことができる。
In the
Thereafter, an extruded pin (not shown) provided on the fixed mold is protruded to extrude the molded product, and the robot arm is retracted to take out the molded product.
このように、上記形態のロボットハンド1によれば、把持爪12の先端に、湯口部分22への当接部16の平面角が略90度となるように面取部15を形成する一方、ベース2に、湯口部分22の周面に当接して把持爪12による湯口部分22の把持位置を位置決めする位置決め部材17を設けたことで、面取部15により把持爪12の強度がアップして欠け等が効果的に防止でき、クランパ6の耐久性が向上して交換頻度が減少する。また、湯口部分22が位置決めの基準となることで、金型が変わっても湯口部分22の把持位置は変化しないため、段取り替えも不要となる。よって、作業効率の向上が期待できる。
特に、位置決め部材17における湯口部分22への当接部分(受部19)を平面V字状としたことで、湯口部分22への位置決め部材17の当接位置を常に一定にでき、当接時のがたつきも防止できる好適な位置決め作用が得られる。
Thus, according to the
In particular, by making the contact portion (receiving portion 19) of the
なお、把持爪の当接部の角度は90度に限らず、90度を超えた鈍角で設定しても良い。また、把持爪はクランパと一体に形成することも可能である。
一方、位置決め部材は、先端を平面V字状に形成した一つの当接体を設けたものとしても差し支えない。さらに、V字状以外に湾曲状等も採用可能である。
その他、クランパの開閉作動はエアシリンダに限らず、油圧シリンダやソレノイド、モータとラックギヤ等の他のアクチュエータや駆動手段を採用しても良い。
Note that the angle of the contact portion of the gripping claw is not limited to 90 degrees, and may be set to an obtuse angle exceeding 90 degrees. The gripping claws can be formed integrally with the clamper.
On the other hand, the positioning member may be provided with a single abutting body whose tip is formed in a flat V shape. Further, a curved shape or the like can be employed in addition to the V shape.
In addition, the opening / closing operation of the clamper is not limited to the air cylinder, and other actuators and driving means such as a hydraulic cylinder, solenoid, motor and rack gear may be employed.
1・・ロボットハンド、2・・ベース、3・・支持板、4・・エアシリンダ、6・・クランパ、10・・リンク、12・・把持爪、13・・前面、14・・傾斜面、15・・面取部、16・・当接部、17・・位置決め部材、18・・当接体、19・・受部、22・・湯口部分。
1 .... Robot hand, 2 .... Base, 3 .... Support plate, 4 .... Air cylinder, 6 .... Clamper, 10 .... Link, 12 .... Grip claw, 13 .... Front, 14 .... Inclined surface, 15 .. Chamfered portion, 16 .. Contact portion, 17 .. Positioning member, 18 .. Contact body, 19 .. Receiving portion, 22.
Claims (2)
前記把持爪の先端に、前記湯口部分への当接部の平面角が略90度若しくはそれ以上となるように面取部を形成する一方、前記ベースに、前記湯口部分の周面に当接して前記把持爪による前記湯口部分の把持位置を位置決めする位置決め部材を設けたことを特徴とするロボットハンド。 A base connected to the tip of the robot arm, and a pair of clampers capable of opening and closing in front of the base and gripping the pouring gate portion of the molded product by a plane acute-angled gripping claw protruding on the opposite side at the front end A robot hand equipped with
A chamfered portion is formed at the tip of the gripping claw so that the plane angle of the abutting portion to the gate portion is approximately 90 degrees or more, while the base contacts the peripheral surface of the gate portion. A robot hand comprising a positioning member for positioning a grip position of the gate by the grip claw.
2. The robot hand according to claim 1, wherein when the gate portion has a circular cross section, a contact portion of the positioning member with respect to the gate portion has a flat V shape.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2005339121A JP4512026B2 (en) | 2005-11-24 | 2005-11-24 | How to take out a molded product using a robot hand |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2005339121A JP4512026B2 (en) | 2005-11-24 | 2005-11-24 | How to take out a molded product using a robot hand |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2007144530A true JP2007144530A (en) | 2007-06-14 |
| JP4512026B2 JP4512026B2 (en) | 2010-07-28 |
Family
ID=38206544
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2005339121A Expired - Fee Related JP4512026B2 (en) | 2005-11-24 | 2005-11-24 | How to take out a molded product using a robot hand |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4512026B2 (en) |
Cited By (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2009220847A (en) * | 2008-03-14 | 2009-10-01 | Shibuya Kogyo Co Ltd | Gripper |
| JP2010099714A (en) * | 2008-10-24 | 2010-05-06 | Toyo Mach & Metal Co Ltd | Molding demounting device |
| JP2016052693A (en) * | 2014-09-02 | 2016-04-14 | トヨタ自動車株式会社 | Robot hand and robot |
| JP2017148909A (en) * | 2016-02-25 | 2017-08-31 | セイコーエプソン株式会社 | Control device, robot, and robot system |
| CN108247004A (en) * | 2018-01-22 | 2018-07-06 | 苏州康克莱自动化科技有限公司 | A kind of die casting machine high temperature clamp device and its gripping method |
| JP2019147222A (en) * | 2018-02-27 | 2019-09-05 | パナソニックIpマネジメント株式会社 | robot |
-
2005
- 2005-11-24 JP JP2005339121A patent/JP4512026B2/en not_active Expired - Fee Related
Cited By (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2009220847A (en) * | 2008-03-14 | 2009-10-01 | Shibuya Kogyo Co Ltd | Gripper |
| JP2010099714A (en) * | 2008-10-24 | 2010-05-06 | Toyo Mach & Metal Co Ltd | Molding demounting device |
| JP2016052693A (en) * | 2014-09-02 | 2016-04-14 | トヨタ自動車株式会社 | Robot hand and robot |
| JP2017148909A (en) * | 2016-02-25 | 2017-08-31 | セイコーエプソン株式会社 | Control device, robot, and robot system |
| CN108247004A (en) * | 2018-01-22 | 2018-07-06 | 苏州康克莱自动化科技有限公司 | A kind of die casting machine high temperature clamp device and its gripping method |
| JP2019147222A (en) * | 2018-02-27 | 2019-09-05 | パナソニックIpマネジメント株式会社 | robot |
| JP7113322B2 (en) | 2018-02-27 | 2022-08-05 | パナソニックIpマネジメント株式会社 | robot |
Also Published As
| Publication number | Publication date |
|---|---|
| JP4512026B2 (en) | 2010-07-28 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4512026B2 (en) | How to take out a molded product using a robot hand | |
| US11167427B2 (en) | Gripper with a trident body section | |
| EP1004410A2 (en) | Adjustable stoppers for limiting the opening angle of a gripper | |
| WO2004084751A3 (en) | Swivel adapter and base unit handle | |
| JP2009012138A (en) | Workpiece gripping robot and method for gripping workpiece | |
| US6530616B1 (en) | Continuity switch for parts grippers | |
| JPH09192968A (en) | Positioning clamp device | |
| JP2006212684A (en) | Product carrying-out device for die casting machine | |
| JP3552082B2 (en) | Drilling machine for work | |
| JP2001105118A (en) | Chucking structure of forged product | |
| JP3476213B2 (en) | Press brake mold length changing device | |
| JP2004223763A (en) | Insert attaching/detaching structure in mold | |
| CN220880468U (en) | Die casting and insert clamping device and deslagging package equipment | |
| JP6585335B2 (en) | Clamping device | |
| CN219445139U (en) | Clamping jaw assembly | |
| CN212822758U (en) | Internal expanding chuck | |
| JPH0741558Y2 (en) | Die-cast molded product take-out hand | |
| JP3126445U (en) | Gripper device | |
| JP2005193263A (en) | Method for cutting off sprue or feeder head part | |
| JP4868857B2 (en) | Die casting machine | |
| JPH0329239U (en) | ||
| JPS6117835Y2 (en) | ||
| JP2004122793A (en) | Molding die | |
| JPH0553766U (en) | Parallel open / close type chuck device for molding machine | |
| JPH1016020A (en) | Mold switchgear with function to extrude molding |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20071116 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20071127 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20080122 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20080826 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20081023 |
|
| A911 | Transfer to examiner for re-examination before appeal (zenchi) |
Free format text: JAPANESE INTERMEDIATE CODE: A911 Effective date: 20081208 |
|
| A912 | Re-examination (zenchi) completed and case transferred to appeal board |
Free format text: JAPANESE INTERMEDIATE CODE: A912 Effective date: 20090220 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20100507 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130514 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 4512026 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |