JP2006308452A - 3次元形状計測方法および装置 - Google Patents
3次元形状計測方法および装置 Download PDFInfo
- Publication number
- JP2006308452A JP2006308452A JP2005132135A JP2005132135A JP2006308452A JP 2006308452 A JP2006308452 A JP 2006308452A JP 2005132135 A JP2005132135 A JP 2005132135A JP 2005132135 A JP2005132135 A JP 2005132135A JP 2006308452 A JP2006308452 A JP 2006308452A
- Authority
- JP
- Japan
- Prior art keywords
- striped pattern
- dimensional shape
- concentric
- information
- distance information
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
- 238000000034 method Methods 0.000 title claims abstract description 18
- 230000003287 optical effect Effects 0.000 claims abstract description 37
- 239000004065 semiconductor Substances 0.000 claims abstract description 11
- 238000003384 imaging method Methods 0.000 claims description 34
- 238000005259 measurement Methods 0.000 claims description 16
- 238000000691 measurement method Methods 0.000 claims description 11
- 238000010586 diagram Methods 0.000 description 4
- 238000005305 interferometry Methods 0.000 description 2
- 238000004088 simulation Methods 0.000 description 2
- 238000006073 displacement reaction Methods 0.000 description 1
- 239000000463 material Substances 0.000 description 1
Images






Landscapes
- Length Measuring Devices By Optical Means (AREA)
Abstract
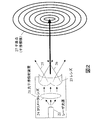
【解決手段】 3次元形状計測装置は、物体1に同心円状の縞模様2を投影する投影装置3と、縞模様2を撮影する撮像装置4と、縞模様2の撮影情報から取得した物体1までの距離情報に基づいて物体1の3次元形状計測を行う演算処理装置5とを備える。同心円状の縞模様2は、例えばプロジェクタあるいは半導体レーザを用いた光干渉投射装置を用いて形成することができる。演算処理装置5は、縞模様2の撮影画像濃度の極小値または極大値を表わす画素ナンバーに基づいて距離情報を取得することができる。
【選択図】 図1
Description
2 同心円状の縞模様
3 投射装置
4 撮像装置
5 演算処理装置(PC)
6 投射装置画角
7 撮像装置画角
21 光干渉投射装置
22 半導体レーザ
23 リング形状レンズ
24 リング形状レンズ
25、26 光線軌跡
27 干渉点(干渉模様)
71 ハーフミラー
Claims (8)
- プロジェクタを用いて物体に同心円状の縞模様を投影し、前記縞模様を撮影し、前記縞模様の撮影情報から取得した物体までの距離情報に基づいて前記物体の3次元形状計測を行うことを特徴とする3次元形状計測方法。
- 物体に同心円状の縞模様を投影し、前記縞模様を撮影し、前記縞模様の撮影情報から取得した物体までの距離情報に基づいて前記物体の3次元形状計測を行う3次元形状計測方法であって、前記距離情報が、前記縞模様の撮影画像濃度の極小値または極大値を表わす画素ナンバーに基づいて取得されることを特徴とする3次元形状計測方法。
- 前記同心円状の縞模様が、プロジェクタを用いて形成されることを特徴とする請求項2記載の3次元形状計測方法。
- 前記同心円状の縞模様が、半導体レーザを用いた光干渉投射装置を用いて形成されることを特徴とする請求項2記載の3次元形状計測方法。
- プロジェクタを用いて物体に同心円状の縞模様を投影する投影装置と、前記縞模様を撮影する撮像装置と、前記縞模様の撮影情報から取得した物体までの距離情報に基づいて前記物体の3次元形状計測を行う演算処理装置とを備えたことを特徴とする3次元形状計測装置。
- 物体に同心円状の縞模様を投影する投影装置と、前記縞模様を撮影する撮像装置と、前記縞模様の撮影情報から取得した物体までの距離情報に基づいて前記物体の3次元形状計測を行う演算処理装置とを備え、前記演算処理装置が、前記縞模様の撮影画像濃度の極小値または極大値を表わす画素ナンバーに基づいて前記距離情報を取得することを特徴とする3次元形状計測装置。
- 前記同心円状の縞模様がプロジェクタを用いて形成されることを特徴とする請求項6記載の3次元形状計測装置。
- 前記同心円状の縞模様が半導体レーザを用いた光干渉投射装置を用いて形成されることを特徴とする請求項6記載の3次元形状計測装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2005132135A JP2006308452A (ja) | 2005-04-28 | 2005-04-28 | 3次元形状計測方法および装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2005132135A JP2006308452A (ja) | 2005-04-28 | 2005-04-28 | 3次元形状計測方法および装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2006308452A true JP2006308452A (ja) | 2006-11-09 |
Family
ID=37475509
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2005132135A Pending JP2006308452A (ja) | 2005-04-28 | 2005-04-28 | 3次元形状計測方法および装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2006308452A (ja) |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN103267495A (zh) * | 2013-04-24 | 2013-08-28 | 中国科学院电工研究所 | 塔式太阳能热发电用单元镜面形检测方法及检测系统 |
| JP2016190002A (ja) * | 2015-03-31 | 2016-11-10 | オリンパス株式会社 | 内視鏡装置及び被検体表面の三次元形状の計測方法 |
| CN109341592A (zh) * | 2018-11-26 | 2019-02-15 | 北京科技大学 | 一种基于激光干涉条纹的路面扫描装置 |
| GB2584797A (en) * | 2019-06-12 | 2020-12-16 | Secr Defence | Measuring device and method |
-
2005
- 2005-04-28 JP JP2005132135A patent/JP2006308452A/ja active Pending
Cited By (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN103267495A (zh) * | 2013-04-24 | 2013-08-28 | 中国科学院电工研究所 | 塔式太阳能热发电用单元镜面形检测方法及检测系统 |
| JP2016190002A (ja) * | 2015-03-31 | 2016-11-10 | オリンパス株式会社 | 内視鏡装置及び被検体表面の三次元形状の計測方法 |
| CN109341592A (zh) * | 2018-11-26 | 2019-02-15 | 北京科技大学 | 一种基于激光干涉条纹的路面扫描装置 |
| CN109341592B (zh) * | 2018-11-26 | 2021-06-29 | 北京科技大学 | 一种基于激光干涉条纹的路面扫描装置 |
| GB2584797A (en) * | 2019-06-12 | 2020-12-16 | Secr Defence | Measuring device and method |
| GB2584797B (en) * | 2019-06-12 | 2021-08-04 | Secr Defence | Measuring device and method |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US10088296B2 (en) | Method for optically measuring three-dimensional coordinates and calibration of a three-dimensional measuring device | |
| US10841562B2 (en) | Calibration plate and method for calibrating a 3D measurement device | |
| JP4290733B2 (ja) | 3次元形状計測方法及びその装置 | |
| US9858682B2 (en) | Device for optically scanning and measuring an environment | |
| US8923603B2 (en) | Non-contact measurement apparatus and method | |
| US9217637B2 (en) | Device for optically scanning and measuring an environment | |
| US9602811B2 (en) | Method for optically measuring three-dimensional coordinates and controlling a three-dimensional measuring device | |
| CN104903680B (zh) | 控制三维物体的线性尺寸的方法 | |
| US9115986B2 (en) | Device for optically scanning and measuring an environment | |
| US11350077B2 (en) | Handheld three dimensional scanner with an autoaperture | |
| WO2016040229A1 (en) | Method for optically measuring three-dimensional coordinates and calibration of a three-dimensional measuring device | |
| WO2016040271A1 (en) | Method for optically measuring three-dimensional coordinates and controlling a three-dimensional measuring device | |
| JP2006308452A (ja) | 3次元形状計測方法および装置 | |
| JP2005331413A (ja) | 距離画像取得システム | |
| JP2021524599A (ja) | モーションエンコーダ | |
| JP2008224330A (ja) | 距離演算システム、距離演算装置、3次元形状演算システムおよび3次元形状演算装置 | |
| KR20190136592A (ko) | 다수 조명을 이용한 3차원 데이터 획득 방법 및 장치 | |
| JP2008145162A (ja) | 三次元形状測定装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20060818 |
|
| A871 | Explanation of circumstances concerning accelerated examination |
Free format text: JAPANESE INTERMEDIATE CODE: A871 Effective date: 20060818 |
|
| A975 | Report on accelerated examination |
Free format text: JAPANESE INTERMEDIATE CODE: A971005 Effective date: 20060914 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20061205 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20070205 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20070306 |