JP2006166314A - 無線局位置推定装置及び方法 - Google Patents
無線局位置推定装置及び方法 Download PDFInfo
- Publication number
- JP2006166314A JP2006166314A JP2004358044A JP2004358044A JP2006166314A JP 2006166314 A JP2006166314 A JP 2006166314A JP 2004358044 A JP2004358044 A JP 2004358044A JP 2004358044 A JP2004358044 A JP 2004358044A JP 2006166314 A JP2006166314 A JP 2006166314A
- Authority
- JP
- Japan
- Prior art keywords
- wireless
- stations
- radio station
- station
- radio
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
- 238000000034 method Methods 0.000 title claims abstract description 58
- 230000005855 radiation Effects 0.000 claims abstract description 102
- 230000005540 biological transmission Effects 0.000 claims abstract description 48
- 230000008569 process Effects 0.000 claims abstract description 18
- 238000004891 communication Methods 0.000 claims description 42
- 230000001360 synchronised effect Effects 0.000 claims description 13
- 235000008694 Humulus lupulus Nutrition 0.000 claims description 12
- 238000013507 mapping Methods 0.000 description 13
- 230000006870 function Effects 0.000 description 11
- 238000005259 measurement Methods 0.000 description 10
- 238000012545 processing Methods 0.000 description 10
- 230000007246 mechanism Effects 0.000 description 8
- 230000005284 excitation Effects 0.000 description 5
- 230000000737 periodic effect Effects 0.000 description 4
- 230000007480 spreading Effects 0.000 description 4
- 108700026140 MAC combination Proteins 0.000 description 3
- 230000008901 benefit Effects 0.000 description 3
- 238000001514 detection method Methods 0.000 description 3
- 238000010586 diagram Methods 0.000 description 3
- 230000003044 adaptive effect Effects 0.000 description 2
- 230000003321 amplification Effects 0.000 description 2
- 238000004364 calculation method Methods 0.000 description 2
- 238000012544 monitoring process Methods 0.000 description 2
- 238000003199 nucleic acid amplification method Methods 0.000 description 2
- 238000001228 spectrum Methods 0.000 description 2
- 230000015572 biosynthetic process Effects 0.000 description 1
- 238000004422 calculation algorithm Methods 0.000 description 1
- 230000008859 change Effects 0.000 description 1
- 238000006243 chemical reaction Methods 0.000 description 1
- 230000007613 environmental effect Effects 0.000 description 1
- 230000002452 interceptive effect Effects 0.000 description 1
- 230000009467 reduction Effects 0.000 description 1
- 238000011160 research Methods 0.000 description 1
- 230000004044 response Effects 0.000 description 1
- 230000035945 sensitivity Effects 0.000 description 1
- 238000004088 simulation Methods 0.000 description 1
- 238000012360 testing method Methods 0.000 description 1
- 238000012549 training Methods 0.000 description 1
- 230000007704 transition Effects 0.000 description 1
- 239000002699 waste material Substances 0.000 description 1
Images




Landscapes
- Position Fixing By Use Of Radio Waves (AREA)
- Small-Scale Networks (AREA)
- Mobile Radio Communication Systems (AREA)
Abstract
【課題】マルチホップでのエリア外の無線局の位置推定において高精度でかつ確実に無線局の位置推定を実行することができる。
【解決手段】無線ビーコン信号を受信した無線局は、無線ビーコン信号の信号強度を各放射ビームパターン毎に測定して第1のテーブルを作成し、これに基づいて、最大の信号強度を有する放射ビームパターンの情報を検索して第2のテーブルを作成し、各無線局につき第2のテーブルの作成処理を繰り返して第2のテーブルを作成し、第2のテーブルを含む無線信号を送信元の無線局に返信する。第1と第2の無線局の各位置座標が既知であるとき、第1と第2の無線局の各位置座標と第2のテーブルに基づいて、第3の無線局の位置座標を計算し、第2と第3の無線局の各位置座標及び第2のテーブルに基づいて、第2と第3の無線局の送信エリア内にある第4の無線局の位置座標を計算する。
【選択図】図13
【解決手段】無線ビーコン信号を受信した無線局は、無線ビーコン信号の信号強度を各放射ビームパターン毎に測定して第1のテーブルを作成し、これに基づいて、最大の信号強度を有する放射ビームパターンの情報を検索して第2のテーブルを作成し、各無線局につき第2のテーブルの作成処理を繰り返して第2のテーブルを作成し、第2のテーブルを含む無線信号を送信元の無線局に返信する。第1と第2の無線局の各位置座標が既知であるとき、第1と第2の無線局の各位置座標と第2のテーブルに基づいて、第3の無線局の位置座標を計算し、第2と第3の無線局の各位置座標及び第2のテーブルに基づいて、第2と第3の無線局の送信エリア内にある第4の無線局の位置座標を計算する。
【選択図】図13
Description
本発明は、自局のエリア外に存在する無線局の位置を推定する無線局位置推定装置及び方法に関する。
無線通信及びパーソナルコンピューティングの最近の進歩は、各ノード無線局が無線トランシーバを備える移動ルータとして機能する高速配備が可能なインフラなしのネットワークとして想定されたアドホック無線ネットワークの研究を促している。一般にアドホック無線ネットワークでは、すべてのノード無線局に無指向性アンテナが備えてられている。しかしながら、無指向性アンテナを使用するアドホック無線ネットワークは、ネットワーク容量の大部分を広いエリアにわたって無線媒体を確保することに浪費するRTS/CTSベースのフロア確保方法を使用する。その結果、送信機及び受信機の近傍にある多くのノード無線局は送受信機間のデータ通信の終了を待ってアイドル状態で存在することを余儀なくされる。
この問題点を緩和するため、研究者らは、送信及び受信ビームを受信及び送信ノード無線局のみに方向づける指向性アンテナの使用を提案している(例えば、特許文献1及び2、非特許文献1及び2)。これは無線干渉を大幅に低減し、これにより無線媒体の利用、すべてはネットワークスループットが向上される。さらに、指向性アンテナの使用は、無指向性アンテナに比べて少ない電力で近傍ノード無線局へ指向的にアクセスできることから電力の節約になる。
例えば、非特許文献1においては、位置推定プロトコル(以下、従来例という。)は、マルチホップを基礎とする位置計算の能力を有することが必要であること、並びに、指向性アンテナシステムとDOA(Direction Of Arrival:到達方向)推定アルゴリズムを利用した位置検出プロトコルを提案している。また、非特許文献1では、複数の指向性アンテナシステムを利用した上記位置検出プロトコルは、特に距離を基礎とする三角法技術を用いる、無指向性アンテナを用いた同様のプロトコルよりもさらにより正確な結果を得ることができることを確認している。ここで、複数の基準ノード無線局を有する切り換え可能なビームアンテナシステムと、移動体ノード無線局を有する切り換えビーム又は無指向性アンテナシステムを提案している。
しかしながら、従来例に係る位置推定プロトコルでは、実際に、指向性アンテナを用いて有効性を確認しておらず、また、マルチホップでのエリア外の無線局の位置推定方法について全く記載していないという問題点があった。
本発明の目的は以上の問題点を解決し、マルチホップでのエリア外の無線局の位置推定において、従来例に比較して高精度でかつ確実に無線局の位置推定を実行することができ、しかも構成が簡単である無線局位置推定装置及び方法を提供することにある。
第1の発明に係る無線局位置推定装置は、複数の無線局を備え、各無線局間で無線通信を行う無線ネットワークにおいて複数ホップの位置にある無線局の位置を推定する無線局位置推定装置において、
上記各無線局は、所定の角度毎に全方位にわたって放射ビームパターンを切り換えながら掃引して、当該送信元の無線局の位置情報及びその放射ビームパターン情報を含む所定の無線ビーコン信号を送信し、
上記無線ビーコン信号を受信した無線局は、上記無線ビーコン信号の信号強度を上記各放射ビームパターン毎に測定し、測定した各放射ビームパターン毎の信号強度を含む第1のテーブルを作成して記憶装置に格納し、上記第1のテーブルに基づいて、最大の信号強度を有する放射ビームパターンの情報を検索して第2のテーブルを作成して上記記憶装置に格納し、当該無線局の近傍の各無線局について上記の第2のテーブルの作成処理を繰り返して、当該無線局の近傍の各無線局についての第2のテーブルを作成して上記記憶装置に格納した後、上記作成された第2のテーブルを含む無線信号を上記送信元の無線局に返信し、
上記無線局位置推定装置は、
上記複数の無線局のうちの第1と第2の無線局の各位置座標が既知であるとき、上記第1と第2の無線局の各位置座標及び上記第1と第2の無線局の記憶装置に格納された第2のテーブルに基づいて、上記第1と第2の無線局の送信エリア内にある、上記複数の無線局のうちの第3の無線局の位置座標を計算し、上記第2と第3の無線局の各位置座標及び上記第2と第3の無線局の記憶装置に格納された第2のテーブルに基づいて、上記第2と第3の無線局の送信エリア内にある、上記複数の無線局のうちの第4の無線局の位置座標を計算する制御手段を備えたことを特徴とする。
上記各無線局は、所定の角度毎に全方位にわたって放射ビームパターンを切り換えながら掃引して、当該送信元の無線局の位置情報及びその放射ビームパターン情報を含む所定の無線ビーコン信号を送信し、
上記無線ビーコン信号を受信した無線局は、上記無線ビーコン信号の信号強度を上記各放射ビームパターン毎に測定し、測定した各放射ビームパターン毎の信号強度を含む第1のテーブルを作成して記憶装置に格納し、上記第1のテーブルに基づいて、最大の信号強度を有する放射ビームパターンの情報を検索して第2のテーブルを作成して上記記憶装置に格納し、当該無線局の近傍の各無線局について上記の第2のテーブルの作成処理を繰り返して、当該無線局の近傍の各無線局についての第2のテーブルを作成して上記記憶装置に格納した後、上記作成された第2のテーブルを含む無線信号を上記送信元の無線局に返信し、
上記無線局位置推定装置は、
上記複数の無線局のうちの第1と第2の無線局の各位置座標が既知であるとき、上記第1と第2の無線局の各位置座標及び上記第1と第2の無線局の記憶装置に格納された第2のテーブルに基づいて、上記第1と第2の無線局の送信エリア内にある、上記複数の無線局のうちの第3の無線局の位置座標を計算し、上記第2と第3の無線局の各位置座標及び上記第2と第3の無線局の記憶装置に格納された第2のテーブルに基づいて、上記第2と第3の無線局の送信エリア内にある、上記複数の無線局のうちの第4の無線局の位置座標を計算する制御手段を備えたことを特徴とする。
上記無線局位置推定装置において、上記制御手段は、
上記第3の無線局の位置座標を計算する前に、上記第1と第2と第3の無線局のうちの少なくとも各1対の無線局間で、互いの位置方向を向く各放射ビームパターンを検出し、当該検出された各放射ビームパターンに基づいて、上記第1と第2と第3の無線局のうちの1つの無線局の各放射ビームパターンにそれぞれ対応する同期した各放射ビームパターンを計算し、上記計算された各放射ビームパターンの関係を示す第3のテーブルを作成して上記記憶装置に格納した後、上記作成された第3のテーブルに基づいて、上記第3の無線局の位置座標を計算し、
上記第4の無線局の位置座標を計算する前に、上記第3と第4の無線局の1対の無線局間で、互いの位置方向を向く各放射ビームパターンを検出し、当該検出された各放射ビームパターンに基づいて、上記第3と第4の無線局のうちの1つの無線局の各放射ビームパターンにそれぞれ対応する同期した各放射ビームパターンを計算し、上記計算された各放射ビームパターンの関係を示す第4のテーブルを作成して上記記憶装置に格納した後、上記作成された第3と第4のテーブルに基づいて、上記第4の無線局の位置座標を計算することを特徴とする。
上記第3の無線局の位置座標を計算する前に、上記第1と第2と第3の無線局のうちの少なくとも各1対の無線局間で、互いの位置方向を向く各放射ビームパターンを検出し、当該検出された各放射ビームパターンに基づいて、上記第1と第2と第3の無線局のうちの1つの無線局の各放射ビームパターンにそれぞれ対応する同期した各放射ビームパターンを計算し、上記計算された各放射ビームパターンの関係を示す第3のテーブルを作成して上記記憶装置に格納した後、上記作成された第3のテーブルに基づいて、上記第3の無線局の位置座標を計算し、
上記第4の無線局の位置座標を計算する前に、上記第3と第4の無線局の1対の無線局間で、互いの位置方向を向く各放射ビームパターンを検出し、当該検出された各放射ビームパターンに基づいて、上記第3と第4の無線局のうちの1つの無線局の各放射ビームパターンにそれぞれ対応する同期した各放射ビームパターンを計算し、上記計算された各放射ビームパターンの関係を示す第4のテーブルを作成して上記記憶装置に格納した後、上記作成された第3と第4のテーブルに基づいて、上記第4の無線局の位置座標を計算することを特徴とする。
また、第2の発明に係る無線局位置推定方法は、複数の無線局を備え、各無線局間で無線通信を行う無線ネットワークにおいて複数ホップの位置にある無線局の位置を推定する無線局位置推定方法において、
上記各無線局は、所定の角度毎に全方位にわたって放射ビームパターンを切り換えながら掃引して、当該送信元の無線局の位置情報及びその放射ビームパターン情報を含む所定の無線ビーコン信号を送信し、
上記無線ビーコン信号を受信した無線局は、上記無線ビーコン信号の信号強度を上記各放射ビームパターン毎に測定し、測定した各放射ビームパターン毎の信号強度を含む第1のテーブルを作成して記憶装置に格納し、上記第1のテーブルに基づいて、最大の信号強度を有する放射ビームパターンの情報を検索して第2のテーブルを作成して上記記憶装置に格納し、当該無線局の近傍の各無線局について上記の第2のテーブルの作成処理を繰り返して、当該無線局の近傍の各無線局についての第2のテーブルを作成して上記記憶装置に格納した後、上記作成された第2のテーブルを含む無線信号を上記送信元の無線局に返信し、
上記無線局位置推定方法は、
上記複数の無線局のうちの第1と第2の無線局の各位置座標が既知であるとき、上記第1と第2の無線局の各位置座標及び上記第1と第2の無線局の記憶装置に格納された第2のテーブルに基づいて、上記第1と第2の無線局の送信エリア内にある、上記複数の無線局のうちの第3の無線局の位置座標を計算し、上記第2と第3の無線局の各位置座標及び上記第2と第3の無線局の記憶装置に格納された第2のテーブルに基づいて、上記第2と第3の無線局の送信エリア内にある、上記複数の無線局のうちの第4の無線局の位置座標を計算する制御ステップを含むことを特徴とする。
上記各無線局は、所定の角度毎に全方位にわたって放射ビームパターンを切り換えながら掃引して、当該送信元の無線局の位置情報及びその放射ビームパターン情報を含む所定の無線ビーコン信号を送信し、
上記無線ビーコン信号を受信した無線局は、上記無線ビーコン信号の信号強度を上記各放射ビームパターン毎に測定し、測定した各放射ビームパターン毎の信号強度を含む第1のテーブルを作成して記憶装置に格納し、上記第1のテーブルに基づいて、最大の信号強度を有する放射ビームパターンの情報を検索して第2のテーブルを作成して上記記憶装置に格納し、当該無線局の近傍の各無線局について上記の第2のテーブルの作成処理を繰り返して、当該無線局の近傍の各無線局についての第2のテーブルを作成して上記記憶装置に格納した後、上記作成された第2のテーブルを含む無線信号を上記送信元の無線局に返信し、
上記無線局位置推定方法は、
上記複数の無線局のうちの第1と第2の無線局の各位置座標が既知であるとき、上記第1と第2の無線局の各位置座標及び上記第1と第2の無線局の記憶装置に格納された第2のテーブルに基づいて、上記第1と第2の無線局の送信エリア内にある、上記複数の無線局のうちの第3の無線局の位置座標を計算し、上記第2と第3の無線局の各位置座標及び上記第2と第3の無線局の記憶装置に格納された第2のテーブルに基づいて、上記第2と第3の無線局の送信エリア内にある、上記複数の無線局のうちの第4の無線局の位置座標を計算する制御ステップを含むことを特徴とする。
上記無線局位置推定方法において、上記制御ステップは、
上記第3の無線局の位置座標を計算する前に、上記第1と第2と第3の無線局のうちの少なくとも各1対の無線局間で、互いの位置方向を向く各放射ビームパターンを検出し、当該検出された各放射ビームパターンに基づいて、上記第1と第2と第3の無線局のうちの1つの無線局の各放射ビームパターンにそれぞれ対応する同期した各放射ビームパターンを計算し、上記計算された各放射ビームパターンの関係を示す第3のテーブルを作成して上記記憶装置に格納した後、上記作成された第3のテーブルに基づいて、上記第3の無線局の位置座標を計算するステップと、
上記第4の無線局の位置座標を計算する前に、上記第3と第4の無線局の1対の無線局間で、互いの位置方向を向く各放射ビームパターンを検出し、当該検出された各放射ビームパターンに基づいて、上記第3と第4の無線局のうちの1つの無線局の各放射ビームパターンにそれぞれ対応する同期した各放射ビームパターンを計算し、上記計算された各放射ビームパターンの関係を示す第4のテーブルを作成して上記記憶装置に格納した後、上記作成された第3と第4のテーブルに基づいて、上記第4の無線局の位置座標を計算するステップとを含むことを特徴とする。
上記第3の無線局の位置座標を計算する前に、上記第1と第2と第3の無線局のうちの少なくとも各1対の無線局間で、互いの位置方向を向く各放射ビームパターンを検出し、当該検出された各放射ビームパターンに基づいて、上記第1と第2と第3の無線局のうちの1つの無線局の各放射ビームパターンにそれぞれ対応する同期した各放射ビームパターンを計算し、上記計算された各放射ビームパターンの関係を示す第3のテーブルを作成して上記記憶装置に格納した後、上記作成された第3のテーブルに基づいて、上記第3の無線局の位置座標を計算するステップと、
上記第4の無線局の位置座標を計算する前に、上記第3と第4の無線局の1対の無線局間で、互いの位置方向を向く各放射ビームパターンを検出し、当該検出された各放射ビームパターンに基づいて、上記第3と第4の無線局のうちの1つの無線局の各放射ビームパターンにそれぞれ対応する同期した各放射ビームパターンを計算し、上記計算された各放射ビームパターンの関係を示す第4のテーブルを作成して上記記憶装置に格納した後、上記作成された第3と第4のテーブルに基づいて、上記第4の無線局の位置座標を計算するステップとを含むことを特徴とする。
従って、本発明に係る無線局位置推定装置及び方法によれば、上記複数の無線局のうちの第1と第2の無線局の各位置座標が既知であるとき、上記第1と第2の無線局の各位置座標及び上記第1と第2の無線局の記憶装置に格納された第2のテーブルに基づいて、上記第1と第2の無線局の送信エリア内にある、上記複数の無線局のうちの第3の無線局の位置座標を計算し、上記第2と第3の無線局の各位置座標及び上記第2と第3の無線局の記憶装置に格納された第2のテーブルに基づいて、上記第2と第3の無線局の送信エリア内にある、上記複数の無線局のうちの第4の無線局の位置座標を計算することにより、マルチホップでのエリア外の無線局の位置推定において、従来例に比較して構成が簡単であって、高精度でかつ確実に無線局の位置推定を実行することができる。
また、上記無線局の位置座標を計算する前に、各1対の無線局間で、互いの位置方向を向く各放射ビームパターンを検出し、当該検出された各放射ビームパターンに基づいて、上記1つの無線局の各放射ビームパターンにそれぞれ対応する同期した各放射ビームパターンを計算し、上記計算された各放射ビームパターンの関係を示す第3及び第4のテーブルを作成したので、マルチホップでのエリア外の無線局の位置推定において、従来例に比較してさらに高い精度でかつ確実に無線局の位置推定を実行することができる。
以下、本発明に係る実施形態について図面を参照して説明する。なお、同様の構成要素については同一の符号を付している。
本実施形態では、GPS(Global Positioning System:全地球測位システム)等のハードウェアを一切追加使用せずにノード無線局のおおよその位置を推定する際の指向性アンテナの別の優位点を探り、指向性アンテナを使用するアドホック無線ネットワークの試験装置を設定して各ノード無線局の近傍の指向性追跡及びこれに続く各ノード無線局の2つの基準ノード無線局に対する位置推定方法の有効性を実証する。この近傍追跡及び位置推定方法は、指向性MAC及び位置支援ルーティングのような指向性ルーティングプロトコルの実装において手助けとなるだけでなく、各ノード無線局がネットワーク内の他のノード無線局のおおよその位置を知る必要のある位置ベースのサービスに関連するアプリケーションにおいても手助けとなる。
指向性アンテナの能力を十分に利用するためには、各ノード無線局が近傍ノード無線局に関する情報(ノード無線局のID、方向、リンク品質等)を予め知っておく必要がある。発信元ノード無線局及び宛先ノード無線局が通信しているときはいつも、発信元及び宛先ノード無線局の近傍のすべてのノード無線局は、発信元と宛先との間で進行中のデータ通信を妨害せず他の方向で新たな通信を開始できるようにその通信方向を認識していなければならない。言い替えれば、この無線通信システムにおいて有効なMAC及びルーティングプロトコルを実施するためには、ノード無線局は、パケットをその近傍ノード無線局へ送信するためのその送信方向の設定方法を知らなければならない。従って、各ノード無線局でその近傍ノード無線局の位置を追跡するメカニズムを保有することが不可欠となる。
本実施形態では、位置追跡及び位置推定には複数のビーコンの使用と位置データに関する複合的観察が必要とされることを示した。これは、移動性の高い場合における発明者らのメカニズムの適用可能性を制限するが、(移動性がまれであるか、数ノード無線局しか移動しない)半静的場合では、この方法がうまく動作する。アプリケーション分野には、リモート環境監視(森林、鉱山、自然災害の発生しやすい地域ほか)用のセンサネットワーク又はリモートエリアにおける地域ネットワーク(例えば、リモートエリアの測地調査又はハイキング及びトレッキング)が含まれる。
図1は、本発明に係る実施形態である、無線局位置推定機能を有するアドホック無線ネットワークの構成を示す複数の無線局1−1乃至1−9(総称して、符号1を付す。)の平面配置図であり、図2は、図1の各無線局1の構成を示すブロック図である。
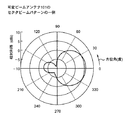
この実施形態の無線通信システムでは、図1に示すように、複数の無線局1が平面的に散在して存在し、各無線局1はそれぞれ、可変ビームアンテナ101の利得や送信電力、受信感度などのパラメータで決定される所定のサービスエリアを有し、このサービスエリア内でパケット通信を行うことができ、サービスエリア外の無線局1とパケット通信を行うときは、サービスエリア内の無線局1を中継局として用いてパケットデータを中継することにより、所望の宛先無線局1にパケットデータを伝送する。すなわち、各無線局1は、パケットのルーティングを行うルータ機能を備え、発信元無線局、中継局、又は宛先無線局として動作する。
この実施形態の無線通信システムは、例えば無線LANなどのアドホック無線ネットワークのパケット通信システムに適用するものであって、無指向性放射パターンであるオムニパターンと、自局を中心とした水平面内の所定の方位角毎にセクタ形状のメインビームを選択的に変更可能なセクタビームパターンと、上記方位角毎にヌル点を形成可能な排他的セクタパターンとを選択的に切り換え可能な可変ビームアンテナ101を備え、隣接リンク状態テーブル(Neighbor Link-State Table)(以下、NLSテーブルという。)及び方位角及び信号強度レベルテーブル(Angle and Signal strength Table)(以下、ASテーブルという。)をデータベースメモリ154に格納し、これらのテーブルに基づいて、可変ビームアンテナ101の放射パターンを制御しながらパケット信号のルーティング処理及び無線局位置推定処理を実行することを特徴としている。
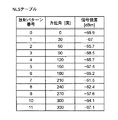
本実施形態では、あるノード無線局NAは、ビーコン信号(ノード無線局NAの位置情報と放射パターン番号を含む。)を、例えば30度毎の12個の指向性パターン(放射パターン番号は0から11まで)を順次切り替えて掃引し、これに対して、ノード無線局NAの各近傍ノード無線局NB(1個又は複数)は無指向性パターンで受信し、各放射パターン番号に対して信号強度を測定することにより、例えば図5に示すNLSテーブル(放射パターン番号、方位角、信号強度を含む。)を作成してデータベースメモリ154に格納する。
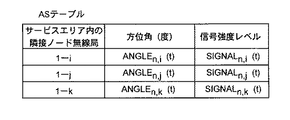
NLSテーブルの作成後、各近傍ノード無線局NBは、NLSテーブルに基づいて、最大の信号強度を有する方位角を検索し、検索した方位角を、当該ビーコン信号を送信したノード無線局NAについての方位角として検出し、当該検出した方位角及びその信号強度レベルをASテーブルに格納する。当該無線通信システム内の複数のノード無線局NAが互いに時間的に重複しないように周期的に繰り返すことにより、各近傍ノード無線局NBにおいて、例えば図6のごとくASテーブルを作成でき、各近傍ノード無線局NBはノード無線局NAに対して当該ASテーブルの情報を無指向性パターンで送信する。これに応答して、ノード無線局NAは当該ASテーブルを受信してデータベースメモリ154に格納する。以上の処理が各ノード無線局において繰り返された後、詳細後述する無線局位置推定処理が実行される。
次いで、図2を参照して、各無線局1の装置構成について説明する。図2において、無線局1は、可変ビームアンテナ101と、その指向性を制御するための指向制御部103と、サーキュレータ102と、データパケット送信部140及びデータパケット受信部130を有するデータパケット送受信部104と、トラヒックモニタ部105と、回線制御部106と、上位レイヤ処理装置107とを備える。
送受信すべきデータを処理する上位レイヤ処理装置107によって発生されたパケット形式の通信用送信信号データは、送信バッファメモリ142を介して変調器143に入力され、変調器143は、所定の無線周波数の搬送波信号を、拡散符号発生器160でCDMA方式で発生された所定の通信チャネル用拡散符号を用いて、入力された通信用送信信号データに従ってスペクトル拡散変調して、変調後の送信信号を高周波送信機144に出力する。高周波送信機144は入力された送信信号に対して増幅などの処理を実行した後、サーキュレータ102を介して可変ビームアンテナ101から他の無線局1に向けて送信する。一方、可変ビームアンテナ101で受信されたパケット形式の通信チャネル用受信信号は、サーキュレータ102を介して高周波受信機131に入力され、高周波受信機131は入力された受信信号に対して低雑音増幅などの処理を実行した後、復調器132に出力する。復調器132は、入力される受信信号を、拡散符号発生器160でCDMA方式で発生された通信チャネル用拡散符号を用いて、スペクトル逆拡散により復調して、復調後の受信信号データを受信バッファメモリ133を介して上位レイヤ処理装置107に出力するとともに、トラヒックモニタのためにトラヒックモニタ部105に出力する。
本実施形態においては、指向性アンテナである可変ビームアンテナ101は、複数のアンテナ素子とその指向性を制御する制御部103に接続され、
(a)無指向性放射パターンであるオムニパターンと、
(b)例えば図3に示すように、自局を中心とした水平面内の所定の方位角毎にセクタ形状のメインビームを選択的に変更可能なセクタビームパターンと、
(c)上記方位角毎にヌル点を形成可能な排他的セクタパターンと
を電気的な制御により選択的に切り換え可能なアンテナである。なお、可変ビームアンテナ101については、例えば、公知のフェーズドアレーアンテナ装置であってもよいし、もしくは、特許文献1、非特許文献1及び2に開示された電子制御導波器アレーアンテナ装置(Electronically Steerable Passive Array Radiator Array Antenna Apparatus)である可変ビームアンテナであってもよい。
(a)無指向性放射パターンであるオムニパターンと、
(b)例えば図3に示すように、自局を中心とした水平面内の所定の方位角毎にセクタ形状のメインビームを選択的に変更可能なセクタビームパターンと、
(c)上記方位角毎にヌル点を形成可能な排他的セクタパターンと
を電気的な制御により選択的に切り換え可能なアンテナである。なお、可変ビームアンテナ101については、例えば、公知のフェーズドアレーアンテナ装置であってもよいし、もしくは、特許文献1、非特許文献1及び2に開示された電子制御導波器アレーアンテナ装置(Electronically Steerable Passive Array Radiator Array Antenna Apparatus)である可変ビームアンテナであってもよい。
トラヒックモニタ部105は、検索エンジン152と、更新エンジン153と、データベースメモリ154と、クロック回路155とを備え、後述のルーティング及び通信処理を実行するとともに、無線局1が他の無線局1とのパケット通信において使用すべき通信チャネルを決定して、決定した通信チャネルに対応する拡散符号の指定データを回線制御部106を介して拡散符号発生器160に送ることにより、拡散符号発生器160が当該指定データに対応する拡散符号を発生するように制御するとともに、決定した通信チャネルに対応するタイムスロットの指定データを回線制御部106を介して送信タイミング制御部141に送ることにより、送信タイミング制御部141が送信バッファメモリ142による通信チャネル用送信信号データの書き込み及び読み出しを制御することにより通信チャネル用送信信号が対応するタイムスロットで送信されるように制御する。なお、クロック回路155は、現在日時を計時してその情報を、必要に応じて管理制御部151に出力する。
トラヒックモニタ部105の検索エンジン152は、管理制御部151の制御によりデータベースメモリ154内のデータを検索して検索したデータを管理制御部151に返信する。また、更新エンジン153は、管理制御部151の制御によりデータベースメモリ154内のデータを更新する。さらに、データベースメモリ154に、ASテーブル、NLSテーブル及び公知のルーティングテーブル(図示せず。)を記憶している。
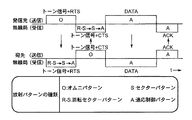
本実施形態においては、アンテナ放射パターンを単一の通信相手先方向の利得が最大となるように指向性を変化させるセクタビームパターンの実効的な送信ビーム幅を30°としており、可変ビームアンテナ101は、方位角を30°毎に選択的に変化可能に設定できる。ビーム幅及び方位角の変化角度は、60°又は他の角度であってもよい。また、本実施形態のパケット通信システムで用いるパケットデータは、図4に示す形式のフォーマットを有する。すなわち、パケットデータは、宛先無線局のIDと、パケット種別(トーン、ANLテーブル、RTS(Request To Send)、CTS(Clear To Send)、DATAなど)と、自局のIDと、データ(上位レイヤでのデータなどを含む)とを含む。さらに、データベースメモリ154に格納されたASテーブルは、図6に示すように、自局のサービスエリア内の隣接ノード無線局毎に、方位角と、信号強度レベルの情報を格納し、パケット送受信制御処理により作成更新される。
次いで、本実施形態で用いるMAC通信プロトコルについて以下に説明する。本実施形態に係る無線通信ネットワークにおいて、互いに無線通信を行う1組の無線局1は二次元的な閉鎖空間内を動き回り、共通の無線通信チャンネルを共有するものと仮定する。各無線局1は、上述の4個の放射パターンを有する、例えば電子制御導波器アレーアンテナ装置である可変ビームアンテナ101を備える。各無線局1は一度に送信又は受信の何れかを実行可能であるが、1つの無線局1で複数の送受信を行うことはできない。
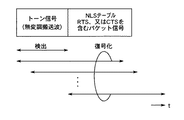
IEEE802.11のMACプロトコル基準では、RTS/CTS/DATA/ACKアクセス制御方式を用いて、高信頼性のデータ通信が保証されているが、本実施形態の方法では、このアクセス制御方式をベースとして、図7及び図8を参照して後述するように、トーン信号+パケット信号を用いた制御信号を用いて、ANLテーブルその他のデータを含むパケット信号を送受信する。従って、データ通信は周期的な、ANLテーブルの生成及び更新フェーズの合間に実行される。また、各フレームにはトレーニングシーケンスが追加されて送受信アンテナによるそのビーム及びヌルの制御及び適応制御モードへの移行が可能にされる。
本実施形態における本発明者らにより発明されたMACプロトコルは、基本的に「受信機による指向、回転セクタベースの指向性のMACプロトコル」であり、これはまた位置追跡メカニズムとしても機能する。この場合、各ノード無線局はアイドルの間、全方向性の検出モードで待機する。これは、しきい値を超える何らかの信号を検出する度に、「回転セクタ受信モード」に入る。「回転セクタ受信モード」では、ノード無線局nはその指向性アンテナを全方向へ例えば30度間隔で順次回転させて、各方向における順次指向性受信の形式で360度の空間全体をカバーし、各方向で受信された信号を検出する。一回転の後、これは、受信された最大の信号強度によって信号の受信方向として最良である可能性のあるものを決定する。次に、そのビームをその方向へ設定し、信号を受信する。
ここで、受信された信号を復号する受信機を有効化するために、各制御パケットは、受信機の回転受信ビームを360度回転させる時間がトーン信号の持続時間(本発明者らのシミュレーションでのケースでは200マイクロ秒)より少し短いような持続時間を有する先行トーン信号を伴って送信される。任意の制御パケット信号より前にこのトーン信号を送信する目的は、受信機が、信号の受信方向として最良である可能性のあるものを追跡できるようにすることにある。これがそのビームをその方向へ設定すると、トーン信号の目的は果たされ、続いて制御パケット信号が送信される。
本発明者らにより提案した本実施形態に係るフレームワークでは、媒体アクセス制御のために、次の4タイプのブロードキャスト(全方向性)制御パケットを使用している。
(1)ANLテーブルを含むパケット信号(ANLパケット信号)、
(2)RTS(送信要求)信号を含むパケット信号、及び
(3)CTS(送信可)信号を含むパケット信号。
(1)ANLテーブルを含むパケット信号(ANLパケット信号)、
(2)RTS(送信要求)信号を含むパケット信号、及び
(3)CTS(送信可)信号を含むパケット信号。
このほか、制御パケットACK信号も、指向性の制御パケットである。データを含むパケット信号は、RTS/CTSのハンドシェイクが行われた後に方向を決めて送信される。ANLパケット信号及びGLSパケット信号は上述のように、周期的な信号であり、各ノード無線局から予め決められた送信周期(送信間隔)で送信される。各周期的間隔において、例えば各ノード無線局mは、ANLパケットをその隣接ノード無線局へ、もしその無線媒体(無線チャンネル)が空き状態であればブロードキャストを行う。先に指摘した通り、ANLパケットは、受信機が信号の受信方向として最良である可能性のあるものを検出する際に役立つ先行のトーン信号を伴って送信される。次いで、各受信機はそのビームをその方向へ設定し、パケットを受信して復号する(図7参照)。
さらに、ノード無線局nは、例えばノード無線局jとのデータ通信の開始を希望する度に無線媒体(無線チャンネル)をチェックし、無線媒体が空き状態であれば全方向性のRTS信号を発行して送信する。宛先無線局jは、RTS信号を受信すると全方向性のCTS信号を発行して送信する。この場合のRTS/CTSの目的は、(オムニアンテナを使用する場合のように)ノード無線局n及びjの隣接ノード無線局による送信又は受信を禁止することではなく、ノード無線局n及びjの隣接ノード無線局に、隣接ノード無線局jがノード無線局nからデータパケットを受信しようとしていることを知らせることにある。これはまた、通信のおおよその持続時間も特定する。ノード無線局n及びjのすべての隣接ノード無線局は、それらの指向性ネットワーク配置ベクトル(Directional Network Allocation Vector(DNAV))をノード無線局n及びjの方向へ設定することにより、ノード無線局nとjとの間の通信を追跡する。従って、ノード無線局n及びjの隣接に存在するノード無線局は、「ノード無線局nとノード無線局jとの間で行われている通信を妨害することなく」他の方向への通信を開始することができる。発信元無線局と宛先無線局は、指向性の受信モードでそれぞれ肯定応答信号及びデータパケット信号を待つ。
次いで、図1の無線局1を用いた、アドホック無線ネットワークのための無線通信システムの詳細について以下に説明する。
図1の可変ビームアンテナ101としては、上述のように、好ましくは、電子制御導波器アレーアンテナ装置を用いる。一般の適応型アレーアンテナは通常、ディジタル型ビーム形成アンテナである。これに対して、電子制御導波器アレーアンテナ装置は高周波ビーム形成に依存し、これが回路の複雑さを大幅に低減する。電子制御導波器アレーアンテナ装置は、発信元無線局の無線送受信機に接続された中央の励振素子と、当該励振素子を中心として所定の半径上に設けられて円形状で取り囲む複数本の非励振素子(典型的には、4乃至6本)とを備えて構成される。各非励振素子には、可変リアクタンス素子が接続され、そのリアクタンス値を調整することにより、各非励振素子は、当該アレーアンテナ装置の放射パターンを異なる形状に形成する。当該電子制御導波器アレーアンテナ装置の特徴は、ビーム方向の制御、同一の周波数による多重ビームの形成、可動式(360度の掃引走査が可能である)ビーム及びヌルステアリングの制御にある。当該電子制御導波器アレーアンテナ装置を一般化されたスイッチング用ビームアンテナとして使用することの優位点は、少数のアンテナ素子で継続して追跡が可能であり、かつ可変数のビームパターンを保有できることにある。当該電子制御導波器アレーアンテナ装置は低コスト、低電力の小型アンテナになるため、ユーザ端末であるノード無線局の電力消費の低減が促進され、スイッチング用ビームアンテナのあらゆる優位点を導出することが可能になる。
次いで、本実施形態に係る無線システムにおける無線局位置追跡と近傍ノード無線局の発見について以下に説明する。
まず、NLSテーブルの作成方法について説明する。指向性アンテナを使用して近傍ノード無線局と効果的に通信するためには、ノード無線局は、その近傍ノード無線局と通信するためにそのアンテナの放射ビームを設定するためにその近傍におけるノード無線局の各々の正確な方向を知る必要がある。各ノード無線局は、この指向的な位置追跡を周期的に実行する。通常、各ノード無線局は、アイドル状態の間は無指向性の受信モードで待機する。位置追跡を開始するに当たっては、例えばNnであるノード無線局は、その12個の指向性ビームパターンを使用して12個の指向性ビーコン信号を順次同報送信する。各ビーコン信号は、ノード無線局ID(その2次元位置情報を含む)及び対応する送信方向(放射パターン番号など)を含む。これは、360度のスパンをカバーして順次30度間隔で全方向に実行される。全方向性受信モードで待機していたノード無線局Nnの近傍にある近傍ノード無線局(例えばNi)は、各指向性ブロードキャストパケットを受信し、受信した信号強度をノード無線局Nnからノード無線局Niへの各方向でノード無線局Niにより検出されたものとして記録する(SIGNALα ni,α={0,30,60,...,330})。ノード無線局Niにおけるノード無線局Nnに対するNLSテーブルは、このようにして生成されてデータベースメモリ154に格納される。図4は、ノード無線局Niにおける典型的なNLSテーブルの一例を示したものである。
同様に、すべてのノード無線局は周期的な指向性ビーコン信号を送信し、例えばノード無線局Niである各ノード無線局は図4に示したフォーマットでそのすべての近傍ノード無線局に関するNLSテーブルを生成し、これが周期的に更新される。
次いで、ASテーブルの作成方法について説明する。NLSテーブルの作成後、ノード無線局Niはそれがノード無線局Nnから最大信号強度を有する信号を受信した際のノード無線局Nnのビームパターンと、ノード無線局Nnから受信した対応する信号強度値とを計算する。次いで、ノード無線局Niは、この情報をノード無線局Nnに無指向性パターンで送信する。これを受信すると、ノード無線局Nnはこの情報をそのASテーブルに記録する。同様にして、ノード無線局Nnはそのすべての近傍ノード無線局から同様の情報を受信し、そのASテーブルを更新する。従って、任意のノード無線局NnにおけるASテーブルは基本的に、ノード無線局Nnの近傍ノード無線局と、ノード無線局Nnの各近傍ノード無線局にアクセスする最良の可能方向と、対応する最良方向で各近傍ノード無線局により検出された信号強度とを含む。ASテーブルを構築するためのこの近傍情報は、任意のノード無線局Nnに周期的に到来することになる。なお、ノード無線局Nnが予め決められた時間にわたってその近傍ノード無線局の任意のものから方向情報を受信しなければ、そのASテーブルからその近傍ノード無線局に対応する入力が削除される。
次いで、無線局位置推定処理について以下に説明する。
ここでは、アドホック無線ネットワークにおけるノード無線局位置の単純な推定メカニズムについて説明する。本実施形態で提案するメカニズムでは、ノード無線局は三角形の幾何学的特性に基づく単純な三角測量技術を適用してその固有位置を演算する。三角測量の引数は、距離測定値又は角度測定値の何れかを参照する。距離測定値は複数の基準位置からの距離測定値から位置を演算するために使用可能であり、角度測定値は距離測定値ではなく複数の基準位置に対する角度測定値を使用してオブジェクトの位置を計算する。二次元空間では、2つの角度測定値と2つの基準ノード無線局の位置とがあれば、ある目的物の位置を一意に同定することができる。従って、提案の位置推定技術は、位置が決まっている基準ノード無線局対からあるノード無線局までの最良の信号の到来角(Angle of Arival:AOA)を使用する。任意のノード無線局は、位置追跡/近傍発見プロセスを介してそのNLSテーブルにおいて近傍の基準ノード無線局からの最良信号の到来角(AOA)測定値を入手することができる。従って、基準ノード無線局対のレンジ(送信エリア)内にあるノード無線局は、各基準ノード無線局からの最良信号の到来角(AOA)及びこれら2つの基準ノード無線局が供給する座標からその固有の座標を計算することができる。従って、提案の枠組みの下では、指定された基準ノード無線局対のレンジ内にあるノード無線局の座標を発見することが可能である。
しかしながら、ノード無線局が両基準ノード無線局から複数のホップで離隔されて存在する場合には問題が生じる。こうしたケースでは両基準ノード無線局からの信号の到来角(AOA)の測定が利用不可であることから、この場合は上述の方法でそのノード無線局の位置を推定することができない。従って、本発明者らは提唱する位置推定メカニズムにおいて、基準ノード無線局対(一次基準ノード無線局)の1ホップの近傍ノード無線局が自ら進んで二次基準ノード無線局となるマルチホップ拡張を提案している。その結果、次には、一次基準ノード無線局から2ホップ離れているノード無線局がこの二次基準ノード無線局を使用して上述の手順によりその位置を計算する。同様に、一次基準ノード無線局から3ホップ離れた近傍ノード無線局は、これらの2番目のホップのノード無線局をその基準ノード無線局として使用する。このようにして、ネットワーク内のすべてのノード無線局の位置を漸次推定することが可能である。
2ホップノード無線局の位置を正確に決定するためには、二次基準ノード無線局のアンテナと一次基準ノード無線局とのアラインメントの同期が必要である。アンテナと基準ノード無線局とのアラインメントの同期は、必然的にアンテナの0番目のビームパターンと基準ノード無線局のそれとのアラインメントを指す。そうでなければ、一次基準ポイントの1ホップの近傍ノード無線局が使用する座標フレームが2ホップの近傍ノード無線局が使用するそれとは異なるものになる。従って、位置推定のための共通の基準フレームを実装するために、アンテナ配向の同期は必要不可欠である。一次基準ノード無線局と二次基準ノード無線局との間(及び二次と三次基準ノード無線局との間など)の段階的なアンテナ同期は、ネットワーク内のすべてのノード無線局に共通する基準フレームを作り上げる。
以下の説明では、まず、一次基準位置対に関連してノード無線局の座標を計算する基本メカニズムを説明し、次に、遠隔ノード無線局の位置を計算する極めて重大なタスクであるアンテナと基準ノード無線局との同期プロセスについて詳述する。最後に、一次基準ノード無線局から複数ホップで離隔しているノード無線局の位置推定プロセスを示す。
まず、基準ノード無線局対を使用するノード無線局による位置推定処理手順について説明する。
<ステップ1>まず最初に、2つの一次基準ノード無線局(これらの位置情報は既知である。)として2つのノード無線局を選択する。ここで、例えば図13に示すように、双方の0番目のビームパターンをX軸を挟んで整合させ、一方のノード無線局を(0,0)に置き、もう一方のノード無線局を(x0,0)におく。提案するケースでは、これらの2つの基準座標セットと、これらの基準ノード無線局からそのノード無線局までの最良の信号の対応する到来角とに基づいてノード無線局の座標を計算する。近傍ノード無線局をあるノード無線局にアクセスさせることができる最良のビームパターンに関する情報は、各ノード無線局が保有するNLSテーブルから入手可能である。このビームパターンからは、対応する到来角を得ることができる。例えば、放射パターン番号0の到来角は0、放射パターン番号1は30゜、放射パターン番号2は60゜など、以下同様である。)。従って、基準ノード無線局から到来するあるノード無線局への最良の信号の到来角は、そのノード無線局のMGLSテーブルに格納された対応するビームパターンから解読することができる。提案する座標計算プロセスでは、この方法を使用した。
<ステップ2>各基準ノード無線局は指向性ビーコンを介してその座標を周期的に送信し、従って、基準ノード無線局の何れか又は双方の近傍に存在する他のノード無線局はこの情報を収集して自らの座標を計算することができる。
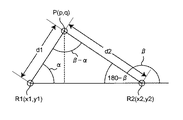
<ステップ3>あるノード無線局(例えば図9のP)が2つの基準ノード無線局R1,R2の座標を何とか収集することができれば(これは、このノード無線局が基準ノード無線局R1及びR2の双方の送信レンジ内にある場合にのみ可能である。すなわち、近傍ノード無線局R1,R2の位置座標は既知であるという仮定。)、当該ノード無線局は、当該ノード無線局が利用可能である次の4つのパラメータを使用して即座に自らの座標(p,q)を計算する。
(a)この場合は(0,0)である基準ノード無線局R1の座標(x1,y1)、
(b)この場合は(x0,0)である近傍ノード無線局R2の座標(x2,y2)、
(c)基準ノード無線局R1からの信号の到来角(α)及び
(d)基準ノード無線局R2からの信号の到来角(β)。
ここで、ノード無線局Pの座標は、下記のプロセスを使用して容易に計算することができる。
(a)この場合は(0,0)である基準ノード無線局R1の座標(x1,y1)、
(b)この場合は(x0,0)である近傍ノード無線局R2の座標(x2,y2)、
(c)基準ノード無線局R1からの信号の到来角(α)及び
(d)基準ノード無線局R2からの信号の到来角(β)。
ここで、ノード無線局Pの座標は、下記のプロセスを使用して容易に計算することができる。
図9において、ラインPR1及びラインPR2に関する一般式は次式で表される。
[数1]
(y−y1)=tanα(x−x1) (1)
[数2]
(y−y2)=tanβ(x−x2) (2)
(y−y1)=tanα(x−x1) (1)
[数2]
(y−y2)=tanβ(x−x2) (2)
ここで、ノード無線局P(p,q)はラインPR1及びラインPR2の交点である。従って、上記式(1)及び(2)の(x,y)に(p,q)を代入すると、次式を得る。
[数3]
p=
((y2−y1)+x1tanα−x2tanβ)/(tanα−tanβ)
(3)
[数4]
q=
((x1−x2)tanαtanβ+(y2tanα−y1tanβ))
/(tanα−tanβ) (4)
p=
((y2−y1)+x1tanα−x2tanβ)/(tanα−tanβ)
(3)
[数4]
q=
((x1−x2)tanαtanβ+(y2tanα−y1tanβ))
/(tanα−tanβ) (4)
<ステップ4>一次基準ノード無線局から2ホップで離隔されているノード無線局は、これらの基準ノード無線局とこのノード無線局との間に直接リンクがないために、上記パラメータからその座標を計算することができない。従って、この場合、2ホップで離隔されたノード無線局はPのようなノード無線局をその基準ノード無線局として使用し、その座標を計算しなければならない。従って、この場合Pは二次基準ノード無線局として動作する。但しその前に、Pのような二次基準ノード無線局はそのアンテナを一次基準ノード無線局に同期させ、共通の基準フレームを共用できるように、かつこの同一の基準フレームに関連して他の遠隔ノード無線局が自らの位置を計算する手助けとなり得るようにしなければならない。よってアンテナを同期させた後、ノード無線局Pは自ら進んで二次基準ノード無線局になることができる。
さらに、非一次基準ノード無線局によるアンテナ同期について以下に説明する。
この問題点及びその解法として可能性のあるものを、反時計方向に0乃至11のビームパターンによって同定される予め決められた12個の放射ビームパターンを有する指向性アンテナモデルとして電子制御導波器アレーアンテナ装置を考慮しながら示す。基準ノード無線局R1はその0番目のビームを東向きに合わせ、例えばPである別のノード無線局の0番目のビームはこのR1の0番目のビームに対して120゜の角度に設定されるものとする(図10)。この場合、R1がPにアクセスするビームパターンは例えば5である。よって理想的には、共通する基準フレームにおいてノード無線局Pは基準ノード無線局R1にその逆ビームパターン11(=5+6)でアクセスするはずである。
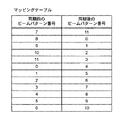
しかしながら、ノード無線局Pの0番目のビームの初期アラインメントは基準ノード無線局R1のそれに対して反時計方向に角度120゜である。従って、ノード無線局Pによれば、基準ノード無線局R1にアクセスする最良のビームパターンはそのASテーブルに放射パターン番号11ではなく、放射パターン番号7と記録されている(図11)。ビームパターンのこの不一致は、ノード無線局P及び基準ノード無線局R1におけるアンテナの初期アラインメントが異なることに起因して発生する。
従って、基準ノード無線局R1(又はR2)からの最良のビームパターンは、基準ノード無線局R1(又はR2)によって送信されたビーコンから両者のアンテナのアラインメントに従ってノード無線局Pにより抽出される。しかしながら、ノード無線局Pの原初のアラインメントはノード無線局R1(又はR2)のアラインメントとは異なる可能性がある。従って、ノード無線局Pは、基準ノード無線局R1(又はR2)のアラインメントに従ってそのビームパターンをマッピングし、その基準フレームを一次基準ノード無線局に同期させなければならない。但し、これは、ノード無線局Pが基準ノード無線局R1の場合に類似する物理的なアンテナアラインメントを保証しなければならないことを意味しない。従って、ノード無線局Pはその時点以降、そのビームパターンの原初のアラインメントではなく同期されたビームパターンを明示するビーコンを送信できるように、何らかのメカニズムを介してその現在のビームパターン(又は放射パターン番号)を同期されたビームパターンにマッピングしなければならない。言い替えれば、ノード無線局Pは、そのアンテナの配向を物理的に変更することなくそのビームパターンを改名する。この改名は、図11のマッピングテーブルを用いて行われる。従って、ノード無線局のアンテナを物理的に合わせる代わりに、マッピングテーブルはその原初のビームパターンを共通の基準フレームに論理的に合わせる。
次いで、同期後のマッピングテーブルの形成方法について以下に説明する。
<ステップ11>例えばPであるノード無線局は、まず、近傍の基準ノード無線局R1からの最大信号強度を有するビーコン信号を得るビームパターン(放射パターン番号)を発見する。これは、基準ノード無線局R1がノード無線局Pにアクセスするための最良のビームパターンである。この情報はノード無線局PのNLSテーブルから取得され、これをpxとする。
<ステップ12>基準ノード無線局R1は次に、パターンpxの逆パターンを導出する。これは、次のように行うことができる。電子制御導波器アレーアンテナ装置は12個のビームパターンを有することから、次式により導出可能である。
[数5]
0≦px≦5であれば、パターンpxの逆ビームパターン=px+6。 (5)
[数6]
6≦px≦11であれば、パターンpxの逆ビームパターン=px−6。 (6)
0≦px≦5であれば、パターンpxの逆ビームパターン=px+6。 (5)
[数6]
6≦px≦11であれば、パターンpxの逆ビームパターン=px−6。 (6)
<ステップ13>次に、ノード無線局PはそのASテーブルを調べて基準ノード無線局R1にアクセスするための最良のビームパターン記録を見つける。これをpyとする。
<ステップ14>次に、ノード無線局Pは逆ビームパターンをpyと付き合わせて下記のように同期後の放射パターン番号を含むマッピングテーブルを形成する。
<ステップ14a>ノード無線局Pはまず、逆ビームパターンの計算値(ステップ12を使用して計算される、ノード無線局Pから基準ノード無線局R1まで)及びそのASテーブルに記載されている基準ノード無線局R1へアクセスする最良のビームパターン(py)から取得される差を求める。この差をオフセットと呼ぶ。
<ステップ14b>次に、ノード無線局Pは、各ビームパターンについて、このオフセット値を加算し、下記のように対応する同期後のビームパターンを得る。
<ステップ14b1>結果である値が11以下であれば、この結果値を対応するパターンの同期後ビームパターンとして、マッピングテーブルに格納する。
<ステップ14b2>但し、結果である値が11より上であれば、対応するパターンの実際の同期後ビームパターンは(結果である値−12)になる。
<ステップ14a>ノード無線局Pはまず、逆ビームパターンの計算値(ステップ12を使用して計算される、ノード無線局Pから基準ノード無線局R1まで)及びそのASテーブルに記載されている基準ノード無線局R1へアクセスする最良のビームパターン(py)から取得される差を求める。この差をオフセットと呼ぶ。
<ステップ14b>次に、ノード無線局Pは、各ビームパターンについて、このオフセット値を加算し、下記のように対応する同期後のビームパターンを得る。
<ステップ14b1>結果である値が11以下であれば、この結果値を対応するパターンの同期後ビームパターンとして、マッピングテーブルに格納する。
<ステップ14b2>但し、結果である値が11より上であれば、対応するパターンの実際の同期後ビームパターンは(結果である値−12)になる。
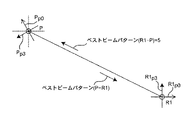
図10に示す例について上記のマッピングテーブルの作成手順を適用した場合は以下のようになる。なお、図10において、ノード無線局PのビームパターンPp0は放射パターン番号0の方向を示しており、ノード無線局PのビームパターンPp3は放射パターン番号3の方向を示している。また、ノード無線局R1のビームパターンR1p0は放射パターン番号0の方向を示しており、ノード無線局R1のビームパターンR1p3は放射パターン番号3の方向を示している。
(1)ノード無線局Pは、基準ノード無線局R1から例えば放射パターン番号5で最大信号強度を有する信号を受信している。図10において、ベストビームパターン(R1−P)=5で示している。
(2)次いで、ノード無線局Pは、放射パターン番号5の逆の放射パターン番号を5+6=11のように計算する。
(3)次いで、ノード無線局Pは、そのASテーブルから基準ノード無線局R1へアクセスするベストビームパターンの放射パターン番号が7であることを発見する。
(4)オフセット(計算した逆ビームパターン(P−R1)とASテーブルに記載されたベストビームパターン(P−R1)との差)は(11−7=4)である。
(5)これで、ノード無線局Pは、上記ステップ14bで説明した規則に従って、図11に示すような同期後マッピングテーブルを作成してデータベースメモリ152に格納する。
(2)次いで、ノード無線局Pは、放射パターン番号5の逆の放射パターン番号を5+6=11のように計算する。
(3)次いで、ノード無線局Pは、そのASテーブルから基準ノード無線局R1へアクセスするベストビームパターンの放射パターン番号が7であることを発見する。
(4)オフセット(計算した逆ビームパターン(P−R1)とASテーブルに記載されたベストビームパターン(P−R1)との差)は(11−7=4)である。
(5)これで、ノード無線局Pは、上記ステップ14bで説明した規則に従って、図11に示すような同期後マッピングテーブルを作成してデータベースメモリ152に格納する。
従って、マッピングテーブルの作成及び自己座標の計算の後、任意のノード無線局(例えばP)は、固定された基準ノード無線局R1及びR2から物理的に遠位に離隔されているノード無線局のための二次基準ノード無線局のように動作することが可能である。
さらに、基準ノード無線局から複数のホップで離隔されているノード無線局の位置推定方法について以下に説明する。
一次基準ノード無線局R1及びR2から複数のホップ(例えば2ホップ)で離隔されているノード無線局(例えばQ)は、基準ノード無線局R1、R2とノード無線局Qとの間に直接リンクがないために、上述したプロセスを使用して直接的にその座標を計算することができない。この場合、ノード無線局Qは、図12に示すノード無線局P及びSのようなノード無線局をその基準ノード無線局として使用し、その座標を計算しなければならない。従って、この場合のノード無線局P及びSは二次基準ノード無線局として動作する。但し、その前に、ノード無線局Pのような二次基準ノード無線局は上述した方法(マッピングテーブルを用いた放射パターンの同期化方法)を使用してそのアンテナを一次基準ノード無線局に同期させ、共通の基準フレームを共用できるように、かつこの同一の基準フレームに関連してQのような他の遠隔ノード無線局が自らの位置を計算する手助けとなり得るようにしなければならない。従って、ノード無線局Pにおける(図11に一例を示した)同期後のマッピングテーブルの形成後、ノード無線局Pは自ら進んで二次基準ノード無線局になることができる。次に、ノード無線局Qは、例えばノード無線局P、Sのような近傍の2つの二次基準ノード無線局の位置及びこれらからの信号の対応する到来角(AOA)を使用し、詳細上述した式(3)及び(4)を用いてその座標を計算することができる。
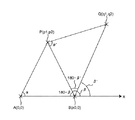
図13は、図1のアドホック無線ネットワークの無線局位置推定機能において2個の基準ノード無線局A,Bからノード無線局Pの位置を推定した後、第2の基準ノード無線局P,Bからノード無線局Qの位置を推定する方法を説明するための平面図である。図13において、ノード無線局A,B,Pはこれらの送信エリア内にあるが、ノード無線局Qはノード無線局Aからの送信エリア外にあるものと仮定している。図13においては、それぞれの位置座標が既知であるノード無線局A,Bからノード無線局Pの位置座標を計算した後、ノード無線局P,Bからノード無線局Qの位置座標を計算する。ここで、ノード無線局Pの位置座標の計算前に、ノード無線局A,B,Pにおいてマッピングテーブルの同期化を行ってノード無線局Pの位置座標の計算を例えばノード無線局Pにおいて行い、また、ノード無線局Qの位置座標の計算前に、ノード無線局B,P,Q(少なくともノード無線局P,Q)においてマッピングテーブルの同期化を行ってノード無線局Qの位置座標の計算を例えばノード無線局Qにおいて行う必要がある。
以上説明したように、本実施形態では、指向性アンテナを使用するアドホック無線ネットワークにおけるノード無線局の位置追跡及び位置推定方法を用いて、複数ホップのノード無線局の位置推定を行うときに、マッピングテーブルの同期化を行うようにしたので、従来例に比較して高い精度でノード無線局の位置推定を行うことができる。
以上詳述したように、本発明に係る無線局位置推定装置及び方法によれば、複数の無線局のうちの第1と第2の無線局の各位置座標が既知であるとき、上記第1と第2の無線局の各位置座標及び上記第1と第2の無線局の記憶装置に格納された第2のテーブルに基づいて、上記第1と第2の無線局の送信エリア内にある、上記複数の無線局のうちの第3の無線局の位置座標を計算し、上記第2と第3の無線局の各位置座標及び上記第2と第3の無線局の記憶装置に格納された第2のテーブルに基づいて、上記第2と第3の無線局の送信エリア内にある、上記複数の無線局のうちの第4の無線局の位置座標を計算することにより、マルチホップでのエリア外の無線局の位置推定において、従来例に比較して構成が簡単であって、高精度でかつ確実に無線局の位置推定を実行することができる。
また、上記無線局の位置座標を計算する前に、各1対の無線局間で、互いの位置方向を向く各放射ビームパターンを検出し、当該検出された各放射ビームパターンに基づいて、上記1つの無線局の各放射ビームパターンにそれぞれ対応する同期した各放射ビームパターンを計算し、上記計算された各放射ビームパターンの関係を示す第3及び第4のテーブルを作成したので、マルチホップでのエリア外の無線局の位置推定において、従来例に比較してさらに高い精度でかつ確実に無線局の位置推定を実行することができる。
1,1−1乃至1−9,1−i,1−j,1−k,1−l,N1乃至N6…ノード無線局、
101…可変ビームアンテナ、
102…サーキュレータ、
103…指向制御部、
104…パケット送受信部、
105…トラヒックモニタ部、
106…回線制御部、
107…上位レイヤ処理装置、
130…パケット受信部、
131…高周波受信機、
132…復調器、
133…受信バッファメモリ、
140…パケット送信部、
141…送信タイミング制御部、
142…送信バッファメモリ、
143…変調器、
144…高周波送信機、
151…管理制御部、
152…検索エンジン、
153…更新エンジン、
154…データベースメモリ、
155…クロック回路、
160…拡散符号発生器。
101…可変ビームアンテナ、
102…サーキュレータ、
103…指向制御部、
104…パケット送受信部、
105…トラヒックモニタ部、
106…回線制御部、
107…上位レイヤ処理装置、
130…パケット受信部、
131…高周波受信機、
132…復調器、
133…受信バッファメモリ、
140…パケット送信部、
141…送信タイミング制御部、
142…送信バッファメモリ、
143…変調器、
144…高周波送信機、
151…管理制御部、
152…検索エンジン、
153…更新エンジン、
154…データベースメモリ、
155…クロック回路、
160…拡散符号発生器。
Claims (4)
- 複数の無線局を備え、各無線局間で無線通信を行う無線ネットワークにおいて複数ホップの位置にある無線局の位置を推定する無線局位置推定装置において、
上記各無線局は、所定の角度毎に全方位にわたって放射ビームパターンを切り換えながら掃引して、当該送信元の無線局の位置情報及びその放射ビームパターン情報を含む所定の無線ビーコン信号を送信し、
上記無線ビーコン信号を受信した無線局は、上記無線ビーコン信号の信号強度を上記各放射ビームパターン毎に測定し、測定した各放射ビームパターン毎の信号強度を含む第1のテーブルを作成して記憶装置に格納し、上記第1のテーブルに基づいて、最大の信号強度を有する放射ビームパターンの情報を検索して第2のテーブルを作成して上記記憶装置に格納し、当該無線局の近傍の各無線局について上記の第2のテーブルの作成処理を繰り返して、当該無線局の近傍の各無線局についての第2のテーブルを作成して上記記憶装置に格納した後、上記作成された第2のテーブルを含む無線信号を上記送信元の無線局に返信し、
上記無線局位置推定装置は、
上記複数の無線局のうちの第1と第2の無線局の各位置座標が既知であるとき、上記第1と第2の無線局の各位置座標及び上記第1と第2の無線局の記憶装置に格納された第2のテーブルに基づいて、上記第1と第2の無線局の送信エリア内にある、上記複数の無線局のうちの第3の無線局の位置座標を計算し、上記第2と第3の無線局の各位置座標及び上記第2と第3の無線局の記憶装置に格納された第2のテーブルに基づいて、上記第2と第3の無線局の送信エリア内にある、上記複数の無線局のうちの第4の無線局の位置座標を計算する制御手段を備えたことを特徴とする無線局位置推定装置。 - 上記制御手段は、
上記第3の無線局の位置座標を計算する前に、上記第1と第2と第3の無線局のうちの少なくとも各1対の無線局間で、互いの位置方向を向く各放射ビームパターンを検出し、当該検出された各放射ビームパターンに基づいて、上記第1と第2と第3の無線局のうちの1つの無線局の各放射ビームパターンにそれぞれ対応する同期した各放射ビームパターンを計算し、上記計算された各放射ビームパターンの関係を示す第3のテーブルを作成して上記記憶装置に格納した後、上記作成された第3のテーブルに基づいて、上記第3の無線局の位置座標を計算し、
上記第4の無線局の位置座標を計算する前に、上記第3と第4の無線局の1対の無線局間で、互いの位置方向を向く各放射ビームパターンを検出し、当該検出された各放射ビームパターンに基づいて、上記第3と第4の無線局のうちの1つの無線局の各放射ビームパターンにそれぞれ対応する同期した各放射ビームパターンを計算し、上記計算された各放射ビームパターンの関係を示す第4のテーブルを作成して上記記憶装置に格納した後、上記作成された第3と第4のテーブルに基づいて、上記第4の無線局の位置座標を計算することを特徴とする請求項1記載の無線局位置推定装置。 - 複数の無線局を備え、各無線局間で無線通信を行う無線ネットワークにおいて複数ホップの位置にある無線局の位置を推定する無線局位置推定方法において、
上記各無線局は、所定の角度毎に全方位にわたって放射ビームパターンを切り換えながら掃引して、当該送信元の無線局の位置情報及びその放射ビームパターン情報を含む所定の無線ビーコン信号を送信し、
上記無線ビーコン信号を受信した無線局は、上記無線ビーコン信号の信号強度を上記各放射ビームパターン毎に測定し、測定した各放射ビームパターン毎の信号強度を含む第1のテーブルを作成して記憶装置に格納し、上記第1のテーブルに基づいて、最大の信号強度を有する放射ビームパターンの情報を検索して第2のテーブルを作成して上記記憶装置に格納し、当該無線局の近傍の各無線局について上記の第2のテーブルの作成処理を繰り返して、当該無線局の近傍の各無線局についての第2のテーブルを作成して上記記憶装置に格納した後、上記作成された第2のテーブルを含む無線信号を上記送信元の無線局に返信し、
上記無線局位置推定方法は、
上記複数の無線局のうちの第1と第2の無線局の各位置座標が既知であるとき、上記第1と第2の無線局の各位置座標及び上記第1と第2の無線局の記憶装置に格納された第2のテーブルに基づいて、上記第1と第2の無線局の送信エリア内にある、上記複数の無線局のうちの第3の無線局の位置座標を計算し、上記第2と第3の無線局の各位置座標及び上記第2と第3の無線局の記憶装置に格納された第2のテーブルに基づいて、上記第2と第3の無線局の送信エリア内にある、上記複数の無線局のうちの第4の無線局の位置座標を計算する制御ステップを含むことを特徴とする無線局位置推定方法。 - 上記制御ステップは、
上記第3の無線局の位置座標を計算する前に、上記第1と第2と第3の無線局のうちの少なくとも各1対の無線局間で、互いの位置方向を向く各放射ビームパターンを検出し、当該検出された各放射ビームパターンに基づいて、上記第1と第2と第3の無線局のうちの1つの無線局の各放射ビームパターンにそれぞれ対応する同期した各放射ビームパターンを計算し、上記計算された各放射ビームパターンの関係を示す第3のテーブルを作成して上記記憶装置に格納した後、上記作成された第3のテーブルに基づいて、上記第3の無線局の位置座標を計算するステップと、
上記第4の無線局の位置座標を計算する前に、上記第3と第4の無線局の1対の無線局間で、互いの位置方向を向く各放射ビームパターンを検出し、当該検出された各放射ビームパターンに基づいて、上記第3と第4の無線局のうちの1つの無線局の各放射ビームパターンにそれぞれ対応する同期した各放射ビームパターンを計算し、上記計算された各放射ビームパターンの関係を示す第4のテーブルを作成して上記記憶装置に格納した後、上記作成された第3と第4のテーブルに基づいて、上記第4の無線局の位置座標を計算するステップとを含むことを特徴とする請求項3記載の無線局位置推定方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004358044A JP2006166314A (ja) | 2004-12-10 | 2004-12-10 | 無線局位置推定装置及び方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004358044A JP2006166314A (ja) | 2004-12-10 | 2004-12-10 | 無線局位置推定装置及び方法 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2006166314A true JP2006166314A (ja) | 2006-06-22 |
Family
ID=36667772
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2004358044A Pending JP2006166314A (ja) | 2004-12-10 | 2004-12-10 | 無線局位置推定装置及び方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2006166314A (ja) |
Cited By (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2008042432A (ja) * | 2006-08-04 | 2008-02-21 | Ricoh Co Ltd | 無線通信端末 |
| JP2009534918A (ja) * | 2006-04-20 | 2009-09-24 | パナソニック株式会社 | 指向性を有するアンテナを用いて無線送信する方法および装置 |
| JP2009253679A (ja) * | 2008-04-07 | 2009-10-29 | Oki Electric Ind Co Ltd | 通信制御装置、方法及びプログラム、ノード、並びに、通信システム |
| JP2009253494A (ja) * | 2008-04-03 | 2009-10-29 | Mitsubishi Electric Corp | 無線通信端末、無線測位システム、照明システム、空調システム、及び駐車場管理システム |
| JP2010098595A (ja) * | 2008-10-17 | 2010-04-30 | Fujitsu Ltd | 無線通信装置及び無線通信方法 |
| KR101013528B1 (ko) | 2009-03-27 | 2011-02-10 | 광주과학기술원 | 이동 비콘을 이용한 위치 추정 장치 및 방법 |
| JP2012524898A (ja) * | 2009-04-23 | 2012-10-18 | グループ デ エコール デ テレコミュニケーションズ | 方位および位置決めシステム |
| CN109031281A (zh) * | 2018-06-25 | 2018-12-18 | 中国海洋大学 | 一种基于旋转天线的海洋搜寻系统及搜寻方法 |
| US10560798B2 (en) * | 2006-11-30 | 2020-02-11 | Nexrf, Corp. | Targeted content delivery |
| US10838582B2 (en) | 2016-06-15 | 2020-11-17 | NEXRF Corp. | Mobile autonomous dynamic graphical user interface |
| JP2021509171A (ja) * | 2018-03-19 | 2021-03-18 | 三菱電機株式会社 | 第2のデバイスの既知のロケーションに基づいて第1のデバイスのロケーションを求めるミリ波通信システム及び方法 |
| US20220295215A9 (en) * | 2008-03-29 | 2022-09-15 | NEXRF Corp. | Targeted content delivery |
-
2004
- 2004-12-10 JP JP2004358044A patent/JP2006166314A/ja active Pending
Cited By (14)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2009534918A (ja) * | 2006-04-20 | 2009-09-24 | パナソニック株式会社 | 指向性を有するアンテナを用いて無線送信する方法および装置 |
| JP2008042432A (ja) * | 2006-08-04 | 2008-02-21 | Ricoh Co Ltd | 無線通信端末 |
| US10560798B2 (en) * | 2006-11-30 | 2020-02-11 | Nexrf, Corp. | Targeted content delivery |
| US20220295215A9 (en) * | 2008-03-29 | 2022-09-15 | NEXRF Corp. | Targeted content delivery |
| US11729576B2 (en) * | 2008-03-29 | 2023-08-15 | NEXRF Corp. | Targeted content delivery |
| JP2009253494A (ja) * | 2008-04-03 | 2009-10-29 | Mitsubishi Electric Corp | 無線通信端末、無線測位システム、照明システム、空調システム、及び駐車場管理システム |
| JP2009253679A (ja) * | 2008-04-07 | 2009-10-29 | Oki Electric Ind Co Ltd | 通信制御装置、方法及びプログラム、ノード、並びに、通信システム |
| JP2010098595A (ja) * | 2008-10-17 | 2010-04-30 | Fujitsu Ltd | 無線通信装置及び無線通信方法 |
| KR101013528B1 (ko) | 2009-03-27 | 2011-02-10 | 광주과학기술원 | 이동 비콘을 이용한 위치 추정 장치 및 방법 |
| JP2012524898A (ja) * | 2009-04-23 | 2012-10-18 | グループ デ エコール デ テレコミュニケーションズ | 方位および位置決めシステム |
| US10838582B2 (en) | 2016-06-15 | 2020-11-17 | NEXRF Corp. | Mobile autonomous dynamic graphical user interface |
| JP2021509171A (ja) * | 2018-03-19 | 2021-03-18 | 三菱電機株式会社 | 第2のデバイスの既知のロケーションに基づいて第1のデバイスのロケーションを求めるミリ波通信システム及び方法 |
| CN109031281B (zh) * | 2018-06-25 | 2023-08-11 | 中国海洋大学 | 一种基于旋转天线的海洋搜寻系统及搜寻方法 |
| CN109031281A (zh) * | 2018-06-25 | 2018-12-18 | 中国海洋大学 | 一种基于旋转天线的海洋搜寻系统及搜寻方法 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| Kułakowski et al. | Angle-of-arrival localization based on antenna arrays for wireless sensor networks | |
| Zhang et al. | Cooperative localization in 5G networks: A survey | |
| EP4323802B1 (en) | Indoor map generation using radio frequency sensing | |
| Zhou et al. | Localization for large-scale underwater sensor networks | |
| Niculescu et al. | DV based positioning in ad hoc networks | |
| CN111034235B (zh) | 小波长无线网络中的信标 | |
| CN114666828A (zh) | 一种用于定位的波束信息的提供方法及装置 | |
| JP6974807B2 (ja) | マルチバンドミリメートル波ネットワークの発見 | |
| US20110291882A1 (en) | Co-operative geolocation | |
| US20090279523A1 (en) | Wireless communication apparatus and wireless communication method | |
| JP2006166314A (ja) | 無線局位置推定装置及び方法 | |
| Othman | GPS-less localization protocol for underwater acoustic networks | |
| JP3899045B2 (ja) | 無線ネットワークの制御方法及び制御装置 | |
| JP2007074561A (ja) | 無線ネットワークのルーティング方法及び無線通信システム | |
| Xiong | Pushing the limits of indoor localization in today’s Wi-Fi networks | |
| Roy et al. | Neighborhood tracking and location estimation of nodes in ad hoc networks using directional antenna: a testbed implementation | |
| JP2001244983A (ja) | 無線ネットワークのためのルーチング方法及びルータ装置 | |
| Dham | Link establishment in ad hoc networks using smart antennas | |
| TW202515143A (zh) | 通訊感知一體化系統中的感知波束管理方法與設備 | |
| CN114531187B (zh) | 自动天线波束对准 | |
| Savvides et al. | Location discovery | |
| Kucuk et al. | A novel localization technique for wireless sensor networks using adaptive antenna arrays | |
| Du et al. | Cooperative neighbor discovery protocol for a wireless network using two antenna patterns | |
| Perkins et al. | Localization in wireless ad hoc networks | |
| Ho et al. | A novel broadcast technique for high-density ad hoc networks |