JP2005528629A - ハイブリッド微小片持ち梁センサー - Google Patents
ハイブリッド微小片持ち梁センサー Download PDFInfo
- Publication number
- JP2005528629A JP2005528629A JP2004510454A JP2004510454A JP2005528629A JP 2005528629 A JP2005528629 A JP 2005528629A JP 2004510454 A JP2004510454 A JP 2004510454A JP 2004510454 A JP2004510454 A JP 2004510454A JP 2005528629 A JP2005528629 A JP 2005528629A
- Authority
- JP
- Japan
- Prior art keywords
- sensing material
- impedance
- analyte
- sensor
- hybrid
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images



























Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N29/00—Investigating or analysing materials by the use of ultrasonic, sonic or infrasonic waves; Visualisation of the interior of objects by transmitting ultrasonic or sonic waves through the object
- G01N29/02—Analysing fluids
- G01N29/022—Fluid sensors based on microsensors, e.g. quartz crystal-microbalance [QCM], surface acoustic wave [SAW] devices, tuning forks, cantilevers, flexural plate wave [FPW] devices
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N29/00—Investigating or analysing materials by the use of ultrasonic, sonic or infrasonic waves; Visualisation of the interior of objects by transmitting ultrasonic or sonic waves through the object
- G01N29/22—Details, e.g. general constructional or apparatus details
- G01N29/24—Probes
- G01N29/2475—Embedded probes, i.e. probes incorporated in objects to be inspected
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N33/00—Investigating or analysing materials by specific methods not covered by groups G01N1/00 - G01N31/00
- G01N33/48—Biological material, e.g. blood, urine; Haemocytometers
- G01N33/50—Chemical analysis of biological material, e.g. blood, urine; Testing involving biospecific ligand binding methods; Immunological testing
- G01N33/53—Immunoassay; Biospecific binding assay; Materials therefor
- G01N33/543—Immunoassay; Biospecific binding assay; Materials therefor with an insoluble carrier for immobilising immunochemicals
- G01N33/54366—Apparatus specially adapted for solid-phase testing
- G01N33/54386—Analytical elements
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N2291/00—Indexing codes associated with group G01N29/00
- G01N2291/04—Wave modes and trajectories
- G01N2291/042—Wave modes
- G01N2291/0427—Flexural waves, plate waves, e.g. Lamb waves, tuning fork, cantilever
Abstract
気体又は液体の媒質中の化学及び/又は生物学的検体を、該検体の存在下における感知素子(12)のインピーダンス及び厚さの変化を監視することにより感知するための装置(10)及び方法が提供される。感知材料の物理的性質における変化を測定して検体の存在及び/又は存在する検体の量を決定するべき検出手段が提供される。媒質中に含められ得る特定検体を検出するべき専用ハイブリッドセンサーのアレイもまた提供される。
Description
本発明は、最も一般的には、化学又は生物学的検体を感知するためのマイクロセンサーに関し、そしてより特定的には本発明は、特定の化学及び/又は生物学的検体の存在を感知するために、特定の化学及び/又は生物学的検体に暴露されたポリマー膜の厚さ及び導電率の変化を同時に測定することが可能なハイブリッドセンサーに関する。
出力がDC導電率のような測定可能な電気信号によって表され得る堅牢で、安価で、信頼性がある且つ小さい化学マイクロセンサーの構築が、目下の関心事である。目下の研究及び開発の目標は、単独の又は複合混合物中の化学又は生物学的検体を検出及び同定し得る装置を構築することである。理想的には、かかるセンサーは、液体又は蒸気のどちらかの環境において機能することができるべきである。
需要が大きい分野は、環境調査、医薬及び対抗テロ行為のための揮発気体の検出である。有機蒸気の感知は、有機薄膜の導電率又は厚さの変化を測定することにより達成されてきた。特定的には、揮発性で空中浮揚性の有機物質は、こぼされた又は偶発的に空気中に放出された場合、機器の内部動作及び生きている生物に有害な影響を及ぼし得る。早期の検出は損傷を最小にし得、また清掃手順をはかどらせ得る。
ベンゼン、テトラヒドロフラン、エタノール、クロロホルム、等のような空中浮揚性の有機物質の同定及び定量は、ポリピロール材料を基材とした「有機鼻」感知装置を用いて、Freund及びLewis(Proceedings of the National Academy of Sciences,92,2652(1995))により例証されている。このセンサーは、コンデンサーの横断切片上にポリピロール薄膜を付着させることにより形成された。横断面は平行列の金属を有し、しかしてこれらの金属にリード線が取り付けられていた。導電性ポリマーが該金属間の隙間を橋絡して、以前に開放されていた回路を完成した。該ポリマーは、暴露される空中浮揚性の気体に感受性であり、しかしてそれらを該薄膜中に吸収した。これらの感知素子のアレイは、種々の有機検体蒸気への暴露にて、電気抵抗変化の化学的に可逆性で且つ一貫性のあるパターンを生じた。これらのパターンは、各検体について反復性があり且つ独特であった。
医学上では、生体アミンを検出する能力は、病気の診断の際に医師を助ける。たとえば、アニリン及びo−トルイジンのような生体アミンが肺ガンについての生物マーカーとして報告されている一方、ジ及びトリメチルアミンが、腎不全を有する患者により認められる魚様の尿毒症性口臭の原因として報告されている。これらのアミン基の早期検出は、患者の診断及び処置をはかどらせる。この技術はまた、適正なヘルスケアを有さない地域において生活している患者についての医師による遠隔診断を可能にし得る。カーボンブラックでドープされたポリアニリンポリマーは、人間の嗅覚系の感度より百万倍大きい感度にてアミン基を感知することができる化学抵抗体検出器のクラスをもたらしている(G.Sotzing等,Chem. Mater.,12,593〜595(2000))。その膜にブチルアミンのようなアミン検体が暴露される場合、それはポリマー膜に膨潤を引き起こす。この膨潤により、導電性炭素原子は膜マトリックス内で互いからより遠くに引き離される。膜の抵抗は、導電性炭素原子間の増加距離に因り増加する。試験されたアミン基についての抵抗増加は、独特的でありそしてその他の応答から識別可能であった。
最後に、出現しているテロ行為の脅威に鑑みて、信頼性のある感知装置による公共の建物及び輸送機関域における神経ガス又は他の揮発/毒性気体を検出する能力が、増加的に重要になってきた。過塩素酸リチウムでドープされたポリエチレンオキシドポリマー化学抵抗体が、神経ガス類似物であるジイソプロピルメチルホスホネート(DIMP)、ジメチルホルムアミド(DMMP)及びジメチルメチルホスホネート(DMF)の間で正確に検出及び識別すると示されている(R.Hughes等,Journal of The Electrochemical Society,148,1〜8(2001))。この系において、ポリマー分子は、検体が吸収されるにつれて膜の膨潤中に転位する。系の導電率は増加し、何故なら移動性電荷は移動すべきより大きく開いた通路を有するからである。系のACインピーダンスは特性量だけ低減され、しかして各気体についてサインインピーダンス変化を生じる。
早くも1986年には、化学抵抗体検出器の背後の一般原理が実証されていた。インターディジタル(IDA)電極の表面上に塗り広げられたところの金属イオンでドープされたフタロシアニン薄膜を用いての早期の感知実験は、有機検体蒸気に暴露された時に該膜の抵抗変化を示した。これらの系は、所与薄膜についての抵抗がセンサーに暴露される蒸気のタイプ(及びその濃度)に依存することに頼った。気体暴露に対する一貫性のある抵抗応答が、導電性のイオン又は可塑剤でドープされたところの有機ポリマーに基づく系により示されている。粘土のような他の物質もまた、成功的に用いられている。
有機ポリマー系は、検体気体がポリマー膜のマトリックス中に拡散する(溶解する又は分配する)過程によって働く。これは、該膜を膨潤又は収縮しそして導電性原子間の距離又は移動性電荷によって取られる通路のどちらかを変化させることにより、該ポリマーの導電率を変化させる。最も単純な系は、ポリアセチレンメラニンのような特質上導電性である有機ポリマーを用いる。かかる系の導電率は、ポリマーマトリックス中で誘電物質として作用する可塑剤の添加によって高められ得る。これは、丁度誘電体が平行板系において高めるように、分子間キャパシタンスを高める。ポリマーの導電率はまた、導電性塩又はカーボンブラック残留物のようなドーピング剤の添加によって増加され得る。これらの2種の物質は、異なる手段によってポリマーの電荷運搬能を増加させる。導電性塩の添加は膜中の移動性電荷担体の数を増加し、しかして電流をより容易に流れさせる。
これに関して注目を受けている系の中に、インターディジタルアレイ上に回転又は滴下塗布により付着されるカーボンブラック有機ポリマー複合物がある。能動センサー材料中へのカーボンブラック成分の包含は、非導電性能動ポリマー物質を通じて測定可能なDC導電率を得るという唯一の目的のためである。検体物質の導入は、ポリマー複合物膜のポリマー膨潤及びその結果生じる抵抗変化を引き起こす。可能性のある物質の組から特定蒸気を同定すること及びその蒸気の濃度を決定すること又は多成分系に関して同様な測定を行うことは、感知素子のアレイの構築を必要とする。センサーのアレイの出力についてのパターン認識技法又は主成分分析が、検体の同定及び定量の目的のために用いられ得る。
かかる系において、カーボンブラックは、その原子間において導電ブリッジとして作用する。電荷は、原子が互いに接近している時にはより容易に流れ、そしてポリマーが膨潤しそして炭素原子の分離を増大する時には流れるのがより困難である。カーボンブラックセンサーは、分子エナンチオマーと同じくらい密接に関連したものの間で識別した。たとえば、ある系において、キラルポリマーがカーボンブラックでドープされ、そして次いでエナンチオマー気体の+及び−型に暴露された。該気体は+/−の場合間で異なって吸収され、そして全抵抗応答において10〜20オームの差がかかる2種の分子間で観測された(E.Severin等,Anal. Chem.,70,1440〜1443(1998))。
しかしながら、多数の欠点が、カーボンブラック有機ポリマー複合物の使用に関連づけられる。第1に、複合物の構成における制御不能な変動に因り、所与セットの化学抵抗体素子の性能特性を信頼性のあるように再現することは困難である。第2に、回転塗布又は滴下塗布されたカーボンブラックポリマー複合物は固有的に事実上準安定性であり、そして時間と共に変化又は劣化し得る。第3に、準安定性の複合物系は、基板表面に信頼性のあるようには接着し得ない。第4に、検体蒸気への準安定性センサー素子の反復暴露は、誤りを招くドリフト及び/又は性能特性の変化に通じ得る。第5に、複合物質中のカーボンは検体への暴露後に検体物質をゆっくり放出し、そしてかくして緩慢な回復時間を有し得る。第6に、インターディジタルアレイは、一般に、界面領域と共に2種の構成部材すなわちガラス基板及び金属薄膜又はワイヤから成る。かかる複雑な構造は、接着問題を導き得る。更に、カーボンブラックは生物学的感知のためには用いられ得ず、何故なら生体分子に基づいた且つ基板に取り付けられたセンサーは、カーボンブラックのような物質を効果的には組み込み得ないからである。
従って、特定検体の存在の同定及び濃度の定量に対する改善感度を有する向上マイクロセンサーに対するニーズが存在する。
発明の要約
本発明は、関心のある特定の生物学的又は化学検体の存在に対して応答性である材料の体積的及び電気的性質の同時測定の可能なハイブリッドセンサーを用いて、生物学的及び/又は化学検体の存在及び量を決定するための方法及び装置を提供する。
本発明は、関心のある特定の生物学的又は化学検体の存在に対して応答性である材料の体積的及び電気的性質の同時測定の可能なハイブリッドセンサーを用いて、生物学的及び/又は化学検体の存在及び量を決定するための方法及び装置を提供する。
一つの具体的態様において、本発明によるハイブリッドセンサーは、試料に暴露されたセンサー材料におけるインピーダンス及び厚さの変化を同時に監視することにより、試料を分析する。
別の具体的態様において、センサー材料は、過塩素酸リチウムでドープされたポリエチレンオキシド薄膜である。
更に別の具体的態様において、インピーダンスは感知材料と信号連通している周波数分析器により測定され、及び/又は厚さは感知材料の表面と接触している撓み性微小片持ち梁センサーにより測定される。
更に別の具体的態様において、ハイブリッドセンサーは、試料中の特定検体の同定及び濃度の両方を決定するように設計される。
更に別の具体的態様において、本発明は、個々のハイブリッドセンサーのアレイを含むハイブリッドセンサーシステムに向けられる。
更に別の具体的態様において、本発明は、本発明によるハイブリッドセンサーを構築する方法に向けられる。
更に別の具体的態様において、本発明は、本願に記載されたようなハイブリッドセンサーを用いて、試料中の検体の同定及び/又は濃度の少なくとも一つを決定する方法に向けられる。
図面の簡単な説明
本発明は、以下の詳細な説明から、添付図面と共に読解される場合最もよく理解される。慣例に従って、図面の様々な特徴部は尺度どおりにない、ということが強調される。それどころか、様々な特徴部の寸法は、明瞭にするために独断的に拡大又は縮小されている。図面には、図1から図31が含まれている。
本発明は、以下の詳細な説明から、添付図面と共に読解される場合最もよく理解される。慣例に従って、図面の様々な特徴部は尺度どおりにない、ということが強調される。それどころか、様々な特徴部の寸法は、明瞭にするために独断的に拡大又は縮小されている。図面には、図1から図31が含まれている。
発明の詳細な説明
本発明は、有機ポリマー又は複合物質の薄膜の厚さ及び導電率における変化を同時に測定することにより、検体蒸気を分析することが可能なハイブリッドセンサーに向けられる。
本発明は、有機ポリマー又は複合物質の薄膜の厚さ及び導電率における変化を同時に測定することにより、検体蒸気を分析することが可能なハイブリッドセンサーに向けられる。
本発明の詳細を説明する前に、次のものは、本願において用いられる略語である。すなわち、
DIMP − ジイソプロピルメチルホスホネート
DMF − ジメチルホルムアミド
DMMP − ジメチルメチルホスホネート
FRA − 周波数応答分析器
GPIB − 汎用インターフェイスバス
IDA − インターディジタルアレイ
LiClO4 − 過塩素酸リチウム
PEO − ポリエチレンオキシド
PEVA − ポリ(エチレンビニルアセテート)
PIB − ポリ(イソブチレン)
PVA − ポリ(ビニルアセテート)
USB − ユニバーサルシリアルバス
DIMP − ジイソプロピルメチルホスホネート
DMF − ジメチルホルムアミド
DMMP − ジメチルメチルホスホネート
FRA − 周波数応答分析器
GPIB − 汎用インターフェイスバス
IDA − インターディジタルアレイ
LiClO4 − 過塩素酸リチウム
PEO − ポリエチレンオキシド
PEVA − ポリ(エチレンビニルアセテート)
PIB − ポリ(イソブチレン)
PVA − ポリ(ビニルアセテート)
USB − ユニバーサルシリアルバス
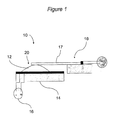
概略図が図1に与えられている一つの例示的具体的態様において、ハイブリッドセンサー10は、感知材料12を基板14上に信号分析装置16と直接的に統合して又は信号分析装置と信号連通してのどちらかにて置きそして次いで圧電微小片持ち梁18の撓み性アーム17を感知材料12の表面20と接触して置くことにより構築される。
かかる具体的態様において、圧電微小片持ち梁18は厚さ測定のために用いられ、そして周波数応答分析器のような信号分析器16はインピーダンス測定のために用いられる。動作中、厚さ及びインピーダンスのデータが同時に測定され、しかして特定の気体又は液体試料への暴露に対する薄膜の応答を特徴づける。次いで、ポリマー感知膜におけるインピーダンス変化は、膨潤に因る厚さ変化の同時測定量と相関させられ得、しかして試料中の特定検体の高感度の多変数「フィンガープリント」をもたらすことになる。次いで、各変数の変化が定量され、そして試料中の検体のタイプ及び検体の濃度の間で識別するために用いられ得る。
感知材料は、ポリマーのような化学センサー材料、又は生体分子、若しくは数種の物質の複合物のような生物学的センサー材料であり得る。感知材料は、導電率センサーと電気連通して及び微小片持ち梁の撓み性アームの先端部上のような微小片持ち梁センサーの一部上に別個の付着物にて形成され得、又は感知素子の連続被膜として、撓み性アームの一部が埋め込まれるように表面に形成され得る。
上記に論考されたように、本ハイブリッドセンサーは、特定検体について「フィンガープリント」を得るために、センサー材料の導電率及び厚さを同時に監視する。たとえば、上記に記載されたシステムにおいて、好ましくは交流(AC)が、リチウム塩でドープされたPEO系のインピーダンスを測定するために用いられる。かかる例示的システムにおいて、薄膜における電流の流れのインピーダンス(Z)は、材料の直流(DC)抵抗に等価のACインピーダンスであり、しかし路長はDC抵抗において因子であるが、ACインピーダンスにおいては因子ではない。AC検出回路はまた、DCの印加が誘導電荷濃度すなわち媒質の分極をもたらすことになる理由からも好ましい。ACの使用はこの分極現象を取り除き、何故なら信号は絶えず方向を変えている正弦波であり、しかして媒質における電荷の集合又は分離を決して可能にしないからである。
測定インピーダンスは、媒質又は素子を通る適用波の周波数に依存し、しかして該インピーダンスは極表示(r,θ)にて表され得、ここでrは信号の大きさに等しく、そしてθは電流の原因となる電圧の移相に等しい。全インピーダンスはまた、直交座標(a,b)(ここで、実成分(a)及び虚成分(b)は、複素関係式
R=a+bi (1)
により与えられる)又は方程式
Z*=Z’+jZ” (2)
(ここで、Z’は実成分(a)であり、Z”は虚成分(b)であり、そしてZ*は全インピーダンスである)にて表され得る。
R=a+bi (1)
により与えられる)又は方程式
Z*=Z’+jZ” (2)
(ここで、Z’は実成分(a)であり、Z”は虚成分(b)であり、そしてZ*は全インピーダンスである)にて表され得る。
本発明によるハイブリッドセンサーシステムの測定は、一般に、直列及び並列のコンデンサー及び抵抗体で構成された電気回路を模する。抵抗体は、ポリマーマトリックスの内側又は外側に沿って起こる移動性電荷のわずかな量のドリフトを模し、そしてコンデンサーは、移動性電荷が有機基板を通って移動するように移動性電荷の挙動を模する。移動性電荷がマトリックスを通って移動する容易性は、移動性イオンの濃度及び移動性電荷が移動し得るところの利用可能な部位の数に依存する。移動性電荷により利用されるチャネル及び部位は、該基板の状態に依存して開閉する。従って、所与ポリマー系について適用するべき適切な周波数を決定するために、直列及び並列の抵抗体とコンデンサーの組合わせが、様々な条件に対するポリマー系の応答をモデル化するべき「タンク回路」を構成するように用いられ得る。
抵抗体と共に並列の複数個のコンデンサーを有する系についての一つの例示的タンク回路が図2に示されており、そしてその対応するナイキストプロットが図3に示されている。図示されているように、図3において、図2に示されたタイプの並列RC回路に関して周波数掃引が遂行される場合、半円が描かれる。実際、周波数範囲が十分に大きい場合、複数個の半円がナイキストプロットにおいて見られる。半円の遠右における点は、回路の抵抗に対応する。半円の最大ピークは、抵抗及びキャパシタンスが系に等しい効果を及ぼす点である。遠左における点は、平行板を無視又は迂回する高周波数波に因るキャパシタンスの有効なバイパスと一致する。
センサー回路の数学的表示もまた、インピーダンスの基本定義からモデル化され得る。次いで、これらの方程式は、理論的期待値を算出するために用いられ得る。図2に示されたタンク回路に関して、3個のコンデンサーの和(C2+C3+C4=Cp)はR1及びC1に並列したコンデンサーに等しく、そしてZ1=−jx1のインピーダンスに相関する。抵抗性/容量性素子R1及びC1は、Z2=R1−jx2により表される。インピーダンスZは、それらがフェーザーである故に太字にある。フェーザーは、調和関数と関連したベクトル(大きさ及び移相を有する)である。キャパシタンスは、並列において、それらの個々のコンデンサーの和として合計する。また、並列のインピーダンスは、それらの逆数の和として合計する。その導出は、下記のとおりになる。すなわち、

これらの方程式を用いて、期待値は、(r,θ)(ここで、Z=r)によって系について算出され得る。図2に示されたモデル回路についてのこれらの計算インピーダンス値の理論プロットが、図4のプロットにて与えられている。
インピーダンスの測定は上記に記載されたように直接測定回路を用いて行われ得るけれども、本発明のハイブリッドセンサーにおけるインピーダンスの測定はまた周波数応答分析器(FRA)を用いて間接的に行われ得る。これは、直列のセンサー及び分路抵抗体(その大きさは、センサーの大きさと同様である)にわたって加えられたAC電圧(正弦波の形状にて)を発生する。機器は一工程ずつ周波数を実行し、そしてセンサー(Vc)及び分路(Vs)にわたっての各工程における電圧降下を分析する。これらの2つの比率が表示され(位相角と共に)、そしてこの結果が分路抵抗体(Rs)の倍数である場合、センサーインピーダンス(Rc=Z)の大きさが知られる。
かかる系において、位相角は、センサー電圧と印加電流の間の位相差を指す。全複素インピーダンスは、インピーダンス対対数(周波数)の関数(Z,log(f))又は移相対対数(周波数)の関数(θ,log(f))として、ナイキストプロットにてプロットされ得る。この方法は、参考文献(P.Bruce,Polymer Electrolyte Review,「ポリマー電解質に関しての電気的測定」,Elsevier Applied Science,ロンドン,ニューヨーク,1987,p266〜269)に詳細に記載されており、しかしてその開示は参照することにより本願に組み込まれる。
関係式V=I×R(Rは、実際上、移相なしでZの大きさである)から開始して、我々は上記に記載された関係式を数学的に導き得、しかして電流(I)は最終式中に存在しないことが注目される。このことは重要であり、何故ならこれらのハイブリッドセンサーに関与する電流は非常に小さく、そしてその値に影響を与えることなく測定するのは困難であるからである。電圧源の振幅は調節され得、そして電気化学的システムにおいて、低電力消費要件を満たすために及びシステムへの損傷を避けるために、0.01V〜0.1Vの小さい電圧が推奨される。本発明において用いるためのFRAの一つの例示的具体的態様についての回路図が、図5に与えられている。かかるFRAについての数学的導出は、次のとおりである。すなわち、
Vs=IRs Vc=IRc
Vs=IRs Vc=IRc
かかるシステムにおいて、先に論考されたように、インピーダンス(Z)データは、機械により、先に論考されたような直交座標(a,b)又は極座標(r,θ)にて返送され得る。
本発明のセンサーのインピーダンス測定は装置を監視するために用いられる周波数に依存する故、センサーの周波数依存性を理解することが重要である。たとえば、センサーが、重量により10:1の濃度比を有するPEO:LiClO4の混合物から成る感知材料膜でもって構築され、そしてFRAを用いて周波数掃引が該センサーに関して遂行された。該センサーについての掃引データが図6に示されており、しかして移相データ(もともと負値として集められた)は、電気化学者の慣習に従って正度に変換されている。
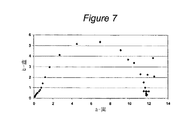
次いで、直交座標は、上記に記載された変換式に従って極座標に変換され、そして極座標にて集められたセンサーデータは、図7に示されているようにナイキストプロットに転写した。観察される半円は、「タンク回路」モデル化により先に予測されたモデルと一致する。
論考されたように、各点は所与周波数を表し、しかして低周波数値は右側にそして高周波数値は左側にある。半円の頂点における最大値は、178Hzの周波数において生じる。この最大値は、抵抗性素子及び容量性素子の寄与が等しい点に対応する。特質上純粋に抵抗性である点は、プロットの極左及び極右において生じる。高周波数値は左側上に落ちそしてほとんどゼロに等しい値を有し、しかして材料を通る信号の低い抵抗に対応する。低周波数値は右側上に見出され、しかして材料を通じての最大の抵抗を有する。
図6及び7におけるグラフを比較することにより、10Hzの信号周波数は極プロットの高インピーダンス平坦域上の中ほどに(log(F)=1において)及びナイキストプロットに関して半円の底部においてその遠右側(約(12,0.1))上にあることが示される。この周波数は、極プロットに関して平坦域内で最大の抵抗を有し、しかしてこの周波数において測定される測定値はもっぱらセンサー材料の抵抗の測定値を与えることを指摘する。
周波数掃引データはまた、図8及び9に示されているように、直交座標にて集められそして次いで極座標に変換された。ナイキストプロットに関して測定b値は負であり、そしてすべての角度測定量は極プロットについて正に変換される、ということが留意されるべきである。直交座標への極座標の変換及びその逆は、各座標系間で整合性のある結果を示す。やはり、これらのデータは、先に示されたタンク回路値及び理論モデルに対応し、低周波数範囲において10.0×105オーム及び高周波数範囲において0.5×105オームの程度の値を有する。
一つの例示的センサーについてのインピーダンスを監視するための周波数掃引データが取られたけれども、かかるデータは本発明によるいかなるハイブリッドセンサーシステムについても周波数依存性を決定するために得られ得ることが理解されるべきである。
先に論考されたように、特定の測定のための適切な周波数を決定することに加えて、感知システムの電力消費ができる限り小さく保たれることも重要である。あまりにも高い電圧はかなりの電力を使い、また潜在的に電気化学反応によって回路を損傷し得、一方あまりにも低い電圧は測定データにおいてノイズの増加レベルを示す。
図10は、種々の電圧が加えられる場合のセンサーにおけるノイズ差を決定するべき周波数掃引プロットを示す。このプロットにおいて、0.01Hzから65kHzの周波数掃引が0.01ボルト信号及び0.1ボルト信号を用いてセンサーに関して遂行されて、これらの2つの信号間のノイズ差が決定された。図示されているように、中及び高周波数において、両電圧信号間に有意な差はない。しかし、低周波数応答を見ると、我々はインピーダンスについて10Hz(log(F)=1)までは0.01Hzレベルにおける大きい差及び移相について1Hz(log(F)=0)までは差が分かる。0.01ボルト信号は、これらの低周波数レベルにおいて0.1ボルト信号より大きいノイズがあり且つ不規則である。10Hzの周波数は最大の抵抗応答を与えることが示されており、そしてこの周波数は0.01ボルト信号についてノイズのある領域の縁にある。従って、或る周波数がセンサーシステムの抵抗に対してより応答性であるけれども、センサーに用いられる電圧と両立できる周波数を選ぶことも重要である。
特定の周波数測定が上記に論考されているけれども、インピーダンスのかかる周波数掃引測定は、センサーの動作を確かめるため並びに任意の適当なセンサーにおけるインピーダンス測定について理想的な周波数及び電圧を同定するための両方のために用いられ得る、ということが理解されるべきである。
たとえば、タンク回路及び例示的センサーの両方の初期周波数掃引に関してFRAにより返送された値は、低周波数における10×105オームから高周波数における0.5×105の程度であった。これらの値は、上記に算出された理論的に予測された値と同じ程度の大きさにある。
更に、周波数対時間プロット及びナイキストプロットを用いて、最適測定信号の同定もまた決定され得る。たとえば、上記に論考された測定において、最大の測定インピーダンスは、0.01Hzから100Hzの周波数範囲において10×105オームの程度であった。10Hzの値が、このピークの中央におけるその位置及び周囲の測定値の周りにおけるノイズの欠如のために、信号測定に用いるための有望な周波数と同定された。178Hzの信号周波数が別の有望な周波数と同定され、何故ならそれは半円のナイキストプロットにおいて最大値として生じたからである。これらの値が好ましいけれども、本発明によるハイブリッドセンサーについてインピーダンス測定値を得るために、理想性が劣る値も用いられ得る、ということが理解されるべきである。
測定値におけるノイズに対する電圧の影響が、0.1ボルト及び0.01ボルトについて決定された。マイクロセンサーの低電力消費要件を満たすことは、低電圧信号の使用を命じる。0.1ボルトはこの要件及び低ノイズへの抑制を満たす、ということが決定された。この電圧の場合、存在ノイズは0.1Hzにおける周波数掃引において消失したのに対して、0.01ボルト信号は1Hzまで有意なノイズ(10Hzの測定について用いられる信号に10の累乗より近い)を示した。これらの測定値の結合から、本発明によるハイブリッドセンサーの一つの好ましい具体的態様は10Hz又は178Hzの周波数及び0.1ボルトの電圧振幅を用いる、ということが決定された。
周波数分析器・インピーダンスセンサーが上記に記載されているけれども、センサー材料における導電率変化を測定することが可能ないかなる分析器も、本発明のハイブリッドセンサーと共に利用され得る。
一方、微小片持ち梁センサーは、感知材料を含む表面から離れた基板上に形成される。微小片持ち梁を形成するために、慣用の半導体加工技術が用いられ得る。微小片持ち梁の様々な配置及び配向が用いられ得る。たとえば、図示されているような一つの具体的態様において、微小片持ち梁は、微小片持ち梁基板の縁を越えて延在する張出し部分を含み得、しかして微小片持ち梁の撓み性アームが感知材料に少なくとも部分的に取り付けられ及び/又は埋め込まれ得るように、該基板と感知材料を含有する表面とが互いにごく接近して置かれることを可能にする。諸構成部材を適所に置く及び整列させるために、走査トンネル顕微鏡(STM)のステージのようなマイクロマニピュレーターが用いられ得る。
微小片持ち梁の撓み性アームは、好ましくは、検体並びに装置に導入される及び標的検体を含み得る気体及び液体媒質による攻撃に対して耐性の半導体物質から形成される。撓み性アームは、気体及び液体環境の両方において使用可能である。微小片持ち梁の撓み性アームは、周囲の感知材料の体積変化に対して応答性の撓み性アームの埋込み部分の撓みにより、応力が撓み性アームに発生される時に変化する少なくとも1つの測定可能な物理的性質を含む。
撓み性アームを含むところのハイブリッド検出器の微小片持ち梁部分の寸法は、様々な具体的態様に従って変動する。一つの例示的具体的態様において、撓み性アームの長さは100ミクロンから200ミクロンの範囲にあり得、高さは10ミクロンから50ミクロンの範囲にあり得、そして幅は25ミクロンから75ミクロンの範囲にあり得、しかし他の寸法が代わりに用いられ得る。更に、図示された静止位置における撓み性アームの本質的に水平な配置は例示にすぎないこと、並びに撓み性アームはその静止位置にある時水平面に対して下方に傾けて形成され得ることが留意されるべきである。この場合において、撓み性アームの軸線は、基板の上面及び底面の各々と鋭角を成し得る。
撓み性アームの構築材料は、分析のために感知材料に導入され得るような液体媒質内に撓み性アームが沈められる場合でさえ、撓み性アームが垂直方向における感知材料の体積変化に応答して曲がるように選ばれるべきである。
撓み性アームは、更に、後続図面に示されるように、周囲の感知材料の垂直方向の体積膨張に応答してアームの撓みにより応力がアームに加えられる時に変化する少なくとも1つの測定可能な物理的性質を含む。撓み性アームが撓む時に変化する測定可能な物理的性質の例は抵抗である。撓み性アームが撓む時に変化する抵抗を生じさせるために、ピエゾ抵抗部材が撓み性アーム内に形成される。他の例示的具体的態様によれば、ピエゾ抵抗部材は、撓み性アームの上面又は下面上に形成され得る。
例示的具体的態様によれば、ピエゾ抵抗部材は、微小片持ち梁の製作過程中に撓み性アーム内に一体的に形成されたチタン酸バリウムのような膜であり得る。撓み性アームが曲がる時、ピエゾ抵抗部材の抵抗は、該部材における機械的ヒズミに因り変化する。歪んでいない微小片持ち梁の抵抗は、例示的具体的態様によれば2キロオームの程度にあり得る。それ故、この例示的な測定可能な物理的性質は、曲がりに因り変化する。この抵抗変化を測定するために、検出手段が用いられる。微小片持ち梁の感度及び検出手段の精度は、わずか数十オングストロームの曲がりが測定可能な抵抗変化をもたらすことになるようなものである。
一つの例示的具体的態様に従って抵抗変化を測定するために、導線が、接点によってピエゾ抵抗部材に結合され得る。かかる具体的態様において、接点の各々は、撓み性アームの上面を貫いて延出してピエゾ抵抗部材と接触する。導線は、次いでピエゾ抵抗部材の抵抗を測定することが可能な慣用の電気回路に結合され得る。
ピエゾ抵抗性という測定可能な物理的性質としての抵抗は例示にすぎないよう意図されている、ということが理解されるべきである。他の例示的具体的態様によれば、撓み性アームが曲がる時に変化する様々な他の物理的性質もまた、この変化を測定することが可能な関連検出手段と共に用いられ得る。好ましい具体的態様によれば、検出手段は、撓みの程度を測定することが可能である。電気回路又は他の手段もまた、測定可能な物理的性質における変化の測定を容易にするために具備され得る。変化を測定する場合、測定可能な物理的性質は好ましくは曲げの前及び後に測定され、そして変化及び変化度を検出するために、それらの結果が比較される。その際、変化それ自体は検出されるよう求められる検体の存在と関連づけられ得、そして物理的性質における変化度は好ましくはアームの撓み度に対応し、しかしてアームの撓み度は今度は好ましくは存在検体の量又は濃度に対応する。別の例示的具体的態様によれば、撓み性アームは、アームが撓む時に変化する測定可能な物理的性質を1つより多く含み得る。
本発明はまた、撓み性アームの測定可能な物理的性質(1つ又は複数)における変化を検出する様々な電気回路のような検出手段を提供する。測定可能な物理的性質は、好ましくは、検出されるよう求められる検体を含み得る媒質の導入の前及び後に測定される。媒質は、感知材料と密接に接触するように導入される。
感知材料は、慣用方法を用いて表面上に形成され得る。インピーダンス分析器と信号連通されている表面上に形成された且つ撓み性アームの張出し部分を部分的に包む別個の材料パッドとして感知材料が形成されるところの図示された例示的具体的態様について、感知材料は、微小毛管を用いることによるような滴下付着、又は小滴を直接的に撓み性アームの張出し部分上に形成させるべきインクジェットプリンター技術の使用により形成され得る。感知材料を付着するための他の方法も代わりに用いられ得る。感知材料付着物は、パッドル、パッド又は小滴の形状を呈し得る。その代わりに、接着を促進するために、表面、又は撓み性アームそれ自体の一部は、感知材料の付着前に誘導体化され得る。
上記に論考されたように、いかなる適当な感知材料も、本発明のハイブリッドセンサーにおいて用いられ得る。本発明における感知材料として用いるための物質の適合性を決定する際に、溶解パラメーター(δ)が、あらゆる可能性のある空中浮揚性溶媒を感知するのに必要とされるポリマー薄膜のタイプ及び数の調査に手がかりを与える。溶解パラメーターは、物質中の分子の吸引強さ又は凝集エネルギーの尺度であり、そしてもともとは混合する流体の自由エネルギーを算出するために用いられた。この概念が溶媒(気体又は液体)及びポリマーに拡張されており、何故なら所与ポリマーとおおよそ同じδを有する溶媒はほぼゼロの混合エンタルピーを有し、その結果自然と混ざるからである。ポリ(イソブチレン)(PIB)が小さいδ値を有する検体に対して最大感度を有したのに対して、ポリ(ビニルアセテート)(PVA)が大きいδ値を有する溶媒に最良に応答した、ということをEastman及びHughesは示した(Eastman等,Journal of the Electrochemical Society,146,3907〜3913(1999))。このパラメーターを用いて、万能センサーアレイが、所与溶媒空間について理論的に提案され得る。定められた溶媒空間の高、低及び中間値をカバーするために、用いられるポリマーの数及びタイプがそれらの溶解パラメーターに基づいて前もって選択される。
感知材料は、化学物質又は生体物質に感受性であり得る。化学感知材料の場合について、純ポリマー、又はポリマーの組合わせの複合物質が、液体又は蒸気相のどちらかの検体を検出するために用いられ得る。形成後、ポリマー感知材料は、例示的具体的態様において幾分ゴム状のコンシステンシーを示す。ポリマー化学感知材料は、検出されるよう求められる少なくとも1種の検体の存在下で体積の膨張又は収縮を受けるように選ばれる。これは、検体が感知材料に引きつけられそして一緒になる(典型的には、吸着、吸収、分配又は結合により)ので起こる。例示的ポリマー化学センサー材料は、ポリ(ビニルアセテート)(PVA)、ポリ(イソブチレン)(PIB)、ポリ(エチレンビニルアセテート)(PEVA)、ポリ(4−ビニルフェノール)、ポリ(スチレン−コ−アリルアルコール)、ポリ(メチルスチレン)、ポリ(N−ビニルピロリドン)、ポリ(スチレン)、ポリ(スルホン)、ポリ(メチルメタクリレート)及びポリ(エチレンオキシド)(PEO)を包含する。
別の例示的具体的態様によれば、ポリマー化学感知材料は、1種より多い上記の又は他の例示的化合物を含む複合物質であり得る。他の感知材料も、代わりに用いられ得る。標的検体に暴露すると、化学センサーは、検体が感知材料により吸着される時、垂直方向を含む体積変化を受けて撓み性アームに垂直方向にて応力を加える。
感知材料はまた、生体分子のような生物学的センサーであり得、しかして生物学的センサーは、検出されるよう求められる検体の存在下で配座変化を受ける。一つの例示的具体的態様によれば、感知材料は、金で形成され得る基板にくっつけられたチオール化一本鎖DNA(デオキシリボ核酸)であり得る。DNA一本鎖のチオール化末端は、金に良好に接着する。かかる生物学的センサーは、相補的DNA鎖を検出するために用いられ得る。DNAは、好ましくは、二重鎖形状にて存在する。相補的DNA鎖(検体)が感知素子に導入される媒質内に含められる場合、この相補的鎖は、チオール化鎖に強く結合して金基板上のDNA層の厚さを効果的に増加させ、すなわち換言すれば、垂直方向における体積膨張を生じる。
生物学的センサーの別の例示的具体的態様によれば、特定ウイルスのような感知されるべき所望検体に特異性である抗体の層が、表面に形成される。検体ウイルスが存在する場合、それは抗体層に強く引きつけられそして引き続いて結合する。このようにして、層厚は増加し、そして垂直方向における体積変化を成す。他の例示的具体的態様によれば、感知されるよう求められる検体の存在に応答して物理的又は形態学的変化を受ける他の生物学的感知素子が用いられ得る。各場合において、感知材料は検体を吸着しそして垂直方向において体積的に膨張又は収縮して、撓み性アームの埋込み部分を撓まし、そしてベースに取り付けられた撓み性アームの部分上に測定可能な応力を生じさせる。更に別の例示的具体的態様によれば、生物学的センサーは、検出されるよう求められる検体の存在に応答して垂直方向において体積的に収縮するよう選ばれ得る。
一つの例示的具体的態様において、感知材料は、図11a及び11bに与えられた例示的顕微鏡写真のどちらかの写真に示されたもののような、インターディジタルアレイ(IDA)上の過塩素酸リチウムでドープされたポリエチレンオキシド(PEO)薄膜を含む。PEOは薄膜感知材料として用いるべき特に好ましいポリマーであり、何故ならPEOがリチウム塩でドープされる場合、改善室温導電率がもたらされることになるからである。
理論により縛られるべきでないけれども、PEO材料における導電率変化は、PEOマトリックスを通じて移動するべきリチウムイオンの能力に関連づけられると信じられる。かかる具体的態様において、PEOポリマー膜の応答は個々の気体について特徴的であり、そして「フィンガープリント」として働き、しかしてライブラリーに保存されそして後に未知蒸気の同定のために参照され得る。該ポリマーの導電率は別にして、基板としてPEOを用いる他の利点は、その経時的耐久性、及び検体蒸気への暴露をやめた後にベースライン状態に「リセット」するべきその能力を含む。PEOはまた、良好な熱的耐久性、様々な揮発性有機化合物に対する有意なインピーダンス応答性、及び暴露後の妥当的に速い且つ完全なリセット性を示す。また、ポリマーの比較的少量しか、感度のよい結果を生じるのに必要とされない。
先に論考されたように、PEOは24.2Mpa1/2の溶解パラメーター値を有し、しかしてこの値は表1の中央にあり、そして多数の有機検体に相当する。エタノール(26.0Mpa1/2)及びアセトン(20.5Mpa1/2)は該表中においてPEOのどちらか一方の側にあり、しかして容易に混ざるはずである。イソオクタン(14.1Mpa1/2)及び水(48Mpa1/2)はPEOから遠く離れて極端にあり、しかしてよく混ざらないはずである。しかしながら、PEOが過塩素酸リチウムでドープされる場合、室温導電率は増加し、何故なら乾燥させる時、PEOは長い螺旋状又はジグザグ状配座を形成し、しかしてLiカチオンがポリマーマトリックス内で移動性を有する環境をもたらすからである。正の移動性電荷は、図12に概略的に示された「ホッピング」と呼ばれる過程において、PEO分子に沿って負性の種々の領域に移動し得る。
理論により縛られるべきでないけれども、PEO薄膜の導電率は、膜マトリックス内でのLi+カチオンの流れにおける抵抗に関連づけられると信じられる。従って、動作中、検体気体分子はポリマーマトリックスのギャラリー間の領域に入り、しかして電荷流に対するボトルネック抵抗を転位して、移動性電荷が移動するための多少の余地を与える。この作用はACインピーダンス(そのDC抵抗は成分である)を変化させて、所与検体についてのサイン抵抗変化を生じさせる。この独特の抵抗変化は、検体気体の物理的及び化学的特性に起因する。気体のサイズ及び分極における差が、ポリマー薄膜中にどれほど多く及びどれほど速く吸収されるかに影響を及ぼす。
PEO対Li+のいかなる適当な比率も本発明において用いられるけれども、PEO:Li+の比率の好ましい範囲は、重量により6:1から15:1の間の領域にある。かかる範囲内のPEO:Li+の比率は、能動導電性膜をもたらすと分かった。Li+のより低い濃度は、一般に、系を自由に動き回って導電率を増加させるのに十分な電荷担体をもたらさず、そしてLi+のより高い濃度(たとえば、混合物が重量により1:1に接近するような)を用いる場合、ポリマー膜は、乾燥して膜を形成するようにはならないで、粘着性の油状状態を維持する。
PEO系が上記に論考されているけれども、他の純ポリマー及びドープされたポリマー系も本発明において用いられ得る、ということが理解されるべきである。たとえば、ポリマーマトリックス中の負領域間におけるチャネルに沿っての移動性Li+の「ホッピング」又は「トンネリング」はまた、ポリアニリン−ポリエチレンオキシド系において観察された。
実施例
一連の例示的感知調査を、本発明によるセンサーの具体的態様に関して行った。次の調査において、様々な化学物質をセンサーについて用い、そして画像化調査を遂行した。薄膜感知材料の作製において用いられた有機ポリマーは、Aldrich Chemicalから購入された分子量4,000,000g/モルのポリエチレンオキシドであった。PEOを過塩素酸リチウム(Baker Analytical,LiClO4)でドープして、導電率を増加させた。PEO及びLiClO4の両方共、極性非プロトン性溶媒アセトニトリル(Aldrich,CH3CN)中に溶解した。センサーシステムは、Microsensor Systemsにより製作されたインターディジタルアレイ(IDA)上に塗り広げられた有機ポリマーの薄膜から成っていた。Ablestik及びLoctiteから購入された2つのタイプの導電性エポキシ樹脂を用いて、リード線をIDAに取り付けた。エイブルボンド(Ablebond)84−1LMISR4の硬化時間は、ロクタイト(Loctite)3888エポキシ樹脂について、175℃オーブン中で2時間又は室温にて一晩であった。Elmer製ゴム糊を用いて、IDAを鉄スラグに据え付けた。バブラー装置において用いられたタンクの圧縮窒素及び圧縮空気を、キャリヤーガスとして用いた。
一連の例示的感知調査を、本発明によるセンサーの具体的態様に関して行った。次の調査において、様々な化学物質をセンサーについて用い、そして画像化調査を遂行した。薄膜感知材料の作製において用いられた有機ポリマーは、Aldrich Chemicalから購入された分子量4,000,000g/モルのポリエチレンオキシドであった。PEOを過塩素酸リチウム(Baker Analytical,LiClO4)でドープして、導電率を増加させた。PEO及びLiClO4の両方共、極性非プロトン性溶媒アセトニトリル(Aldrich,CH3CN)中に溶解した。センサーシステムは、Microsensor Systemsにより製作されたインターディジタルアレイ(IDA)上に塗り広げられた有機ポリマーの薄膜から成っていた。Ablestik及びLoctiteから購入された2つのタイプの導電性エポキシ樹脂を用いて、リード線をIDAに取り付けた。エイブルボンド(Ablebond)84−1LMISR4の硬化時間は、ロクタイト(Loctite)3888エポキシ樹脂について、175℃オーブン中で2時間又は室温にて一晩であった。Elmer製ゴム糊を用いて、IDAを鉄スラグに据え付けた。バブラー装置において用いられたタンクの圧縮窒素及び圧縮空気を、キャリヤーガスとして用いた。
回路セルを通過した後に返送及び分析される周波数変調信号を発生するソーラートロン/シュランベルガー(Solartron/Schlumberger)1250周波数応答分析器(FRA)を用いて、インピーダンス及び移相のデータを獲得した。Microscopes Inc.から購入された圧電片持ち梁型式#PLCT−SAMTを用いて、厚さ変化を測定した。片持ち梁の曲がりは、キースレーマルチメーター(Keithley Multimeter)199 DMMを用いて測定される抵抗応答を生じた。あらゆる他の電気的故障検査について、携帯手持ち型ウエーブテック(Wavetek)X15マルチメーターを用いた。データ収集及び監視の目的のためにFRA及びマルチメーターをSony製(900MHzアトロン(Athlon)プロセッサー/40GBメモリー)マイクロコンピューターとインターフェイス接続するために、National Instrumentsからの汎用インターフェイスバス(GPIB/USB)プラグと共に、ラブビュー(LabView)グラフプログラミングソフトウエアを用いた。画像化及び片持ち梁据付けを、Park Scientific製走査力顕微鏡(SFM)を用いて行った。Mitutoyoによって作られた可変膜スプレッダーにより、薄膜を均一に塗り広げた。乾燥窒素タンクと検体バブラータンクを連結するガラス・タイゴン(Tygon)管バブラーシステムを用いて、ハイブリッドセンサーシステムを包囲するところのSFMに適合したヘッドキャップに、様々な濃度の気体を送達した。
表面図解(表面特徴を示す)及び位相差(材料組成の相違を示す)の設定を用いて、SFM画像化をポリマー膜表面に関して遂行した。走査を、5ミクロン及び2ミクロンのレベルにて行った。ポリマーを上記のように製造し、そして鉄スラグにポリマーを滴下塗布しそして膜スプレッダーを用いてそれを平坦に広げることにより、薄膜を作製した。純PEOポリマー並びに重量により7:1、10:1、15:1及び20:1の濃度にてLi+でドープされたPEOについて、25、50、75及び100%水蒸気において画像を撮った。
感知装置の製作は、IDAの予備検査から開始した。マルチメーターに取り付けられたピンポイントプローブを用いて、抵抗を電極パッドにおいて測定した。返送値は、アレイにおけるディジットが隣接ディジットに触れない場合無限であるはずである。IDAの表面を清潔状態について目視的に点検し、そしていかなるちり又はほこりも圧縮空気で除去した。その後、アセトニトリルを用いて、表面を洗浄して薄膜の接着性を増大させた。硝酸を用いて、センサー用配線から両端におけるその絶縁材を取り去った。次いで、露出電線を、蒸留水及び化学拭取り布で清浄にした。配線抵抗を測定し、そして大きい抵抗を有する電線を廃棄した。固定のためにIDA及びリード線をテープ留めするために、スライドガラスを土台として用いた。導電性エポキシ樹脂を施用し、そしてオーブン中で又は室温にて硬化させた。エポキシ樹脂が硬化した後、エポキシ樹脂施用領域を中央にして電線及び金パッド上にリード線を置くことによって接合部にわたっての抵抗を測定することにより、生じた連結を検査した。高い(又は無限の)読取り値は、不良な(開回路)連結に相当する。
10:1の比率(重量により)にてLiClO4でドープされたPEOを、有機薄膜感知材料として用いた。約0.200グラムのPEO粉末及び0.020グラムのLiClO4塩を、前秤量した10mlビーカー中に入れた。アセトニトリル5mlを、LiClO4のビーカー中にピペットで入れた。磁性撹拌棒をこの溶液中に置き、そしてビーカーを磁性撹拌板上に置いた。固体を5分間撹拌し、しかしてその時点にてLiClO4は完全に溶解された。この時点にて、PEO粉末をリチウム溶液に添加した。この添加後、PEOビーカーを後秤量し、そして更に4mlのアセトニトリルをこの混合物に添加した。清浄な#4緑色栓をビーカーの上に置き、そしてこの混合物を一晩撹拌した。該栓は容器を密封し、そして溶媒が蒸発するのを防ぐ。曇ったゲルがもたらされ、しかしてこのゲルをIDA表面上へ滴下流延した。この膜を一晩乾燥した後、ゴム糊を用いてこのIDAを鉄スラグ上に据え付けた。次いで、センサーリード線を、FRAの後共軸プラグへの取付けのための共軸変換フェンスにハンダ付けした。
FRA及びセンサーインピーダンスの適正な動作を確実にするために、測定中、0.01Hzから65kHzの周波数の対数掃引を行うことにより、インピーダンス(Z)及び移相(θ)のベースライン測定を行う。厚さ測定について、ベースライン抵抗において1〜3オームのジャンプが観察されるまで、圧電片持ち梁を膜の表面上に下げた。膜の収縮段階中膜表面との接触を失わないようにするために、片持ち梁においてベンドを前もって加重する。
初期の準備及び検査後、センサーのインピーダンス及び厚み素子は、気体暴露のために準備できている。この時点にて、気体管路を開き、そしてヘッドキャップをセンサー上に置く。N2キャリヤーガスをバブラー装置を通じて流し、しかして該バブラー装置において該キャリヤーガスは試験されるべき検体気体を取り上げた。試験された検体は、蒸留水、エタノール190プルーフ(Aldrich,C2H5OH)、エタノール200プルーフ(Aldrich)、アセトン(Aldrich,CH3COCH3)及びn−オクタン(Lancaster,C8H18)を包含した。バブラー制御器及び指示計を用いて、送達される検体気体の濃度を0から100%に調節した。検体蒸気の導入前に、センサーを乾燥N2に15分間暴露してセンサーをリセットした。典型的な暴露サイクルは、30秒のベースラインの読取りを行った後、薄膜の飽和が起こるまで検体蒸気の添加をすることから成った。この後、再び乾燥N2により、ベースラインレベルが達成される(この時点には、検体のすべてがポリマーを去っている)まで続行した。蒸気へのポリマーの暴露に因る厚さ変化を、片持ち梁によって測定される抵抗応答データにより監視した。FRAは、別段記されていなければ、0.1ボルト及び10Hzに設定された発生器でもってインピーダンス変化を測定した。データをスプレッドシートに転写し、しかしてグラフ的に及び数学的に相関させた。
実施例1
第1の例示的具体的態様において、上記に記載されたように、FRAに連結された薄膜有機ポリマー感知材料で被覆されたIDAセンサーを用いて、インピーダンス測定を行った。測定値をFRAのファイルメモリー中に保存するか又はコンピューターに対するGPIB/ラブビュー(LabView)インターフェイスを用いてコンピューターにダウンロードするかのどちらかをした。次いで、インピーダンス変化及び移相を、N2ガスにより担持された100%水蒸気のセンサーへの暴露の間、時間の関数として測定した。試験を2つのパートに分け、しかして99個のデータポイントを薄膜が膨潤している時に取り、そして99個をそれが緩和している時に取った。パート1において、センサーを100%水蒸気に0〜530秒において暴露した。ヘッドキャップを、530〜600秒において取り去った。パート2において、センサーを完全飽和にし(パート1においてように)、次いで乾燥N2に600〜1200秒において暴露し、しかしてこの時間の間インピーダンス及び移相のデータを測定した。
第1の例示的具体的態様において、上記に記載されたように、FRAに連結された薄膜有機ポリマー感知材料で被覆されたIDAセンサーを用いて、インピーダンス測定を行った。測定値をFRAのファイルメモリー中に保存するか又はコンピューターに対するGPIB/ラブビュー(LabView)インターフェイスを用いてコンピューターにダウンロードするかのどちらかをした。次いで、インピーダンス変化及び移相を、N2ガスにより担持された100%水蒸気のセンサーへの暴露の間、時間の関数として測定した。試験を2つのパートに分け、しかして99個のデータポイントを薄膜が膨潤している時に取り、そして99個をそれが緩和している時に取った。パート1において、センサーを100%水蒸気に0〜530秒において暴露した。ヘッドキャップを、530〜600秒において取り去った。パート2において、センサーを完全飽和にし(パート1においてように)、次いで乾燥N2に600〜1200秒において暴露し、しかしてこの時間の間インピーダンス及び移相のデータを測定した。
インピーダンス及び移相の測定結果は、それぞれ図13aと13b及び14aと14bに示されている。図示されているように、「a」図と「b」図が合わせられると、ポリマーを通じて流れる電流のインピーダンス及び移相の対称変化が示され、しかして本発明によるセンサーのインピーダンスが水検体の存在に対して鋭敏に応答するのみならず、センサーが回復することもできそしてかくして再使用され得ることを指摘する。特定的には、センサーのインピーダンスは図13aにおける8.3×105オームにて始まり、そして図13bにおけるそこで終わる。インピーダンスについての低点は、両パートについて約7.6×105オームであった。これは、膜のインピーダンスにおいて0.7×105オームの総合インピーダンス変化及び(0.7/8.3)×100=8.4%のパーセント変化を与える。移相データは、図14aについて39°及び図14bについて38°の高値並びに図14a及び14bの両方について33.5°の低値を示す。これは、14aについて5.5°及び14bについて4.5°の差並びに14a及び14bについてそれぞれ(5.5/39)×100=14%及び(4.5/38)×100=12%のパーセント変化に相当する。
実施例2
本願に記載されているような感知材料におけるインピーダンス変化の利用がいくつかの検体間で識別するために示されているけれども、センサーの分解能を増大してそれらを検体のタイプ及び濃度に対してより鋭敏にするために、本ハイブリッドセンサーは、感知材料の厚さ変化の追加の且つ同時の測定を用いるように設計される。
本願に記載されているような感知材料におけるインピーダンス変化の利用がいくつかの検体間で識別するために示されているけれども、センサーの分解能を増大してそれらを検体のタイプ及び濃度に対してより鋭敏にするために、本ハイブリッドセンサーは、感知材料の厚さ変化の追加の且つ同時の測定を用いるように設計される。
先に論考されたように、ポリマー膜は、有機蒸気に暴露された時に膨潤する。データは、厚さ応答が個々の気体及びそれらの濃度について特徴的且つ独特であることを示す。本発明の一つの具体的態様において、感知材料の一つの表面と接触して置かれた圧電片持ち梁を用いて、種々の気体及び濃度に因る膨潤量が測定される。一つの例示的微小片持ち梁の写真が、図15aに示されている。
かかる具体的態様において、片持ち梁のアームは、感知材料膜の表面と接触して置かれる。たとえば片持ち梁を走査力顕微鏡(SFM)のステージに据え付けることによるような、片持ち梁アームを感知材料に据え付けるいかなる適当な方法も用いられ得る。SFMステージ伝動装置及び光学顕微鏡により、有機薄膜感知材料の表面への片持ち梁先端部の配置の際の微調節が可能にされる。これにより、先端部は表面に正確に置かれ、また片持ち梁は損傷から救われる。
図15b及び15cに示されているように、片持ち梁は、超小型回路に取り付けられた傾斜ブレードである。片持ち梁のブレード(図15cにおいてクローズアップにて示されている)がポリマーの表面と接触する時、それは曲がる。片持ち梁先端部の物質は、その格子構造の平面に応力が加えられる時に変化する永久双極子モーメントを有する。曲げの応力下で、内部電界は変化し、しかして電気信号を生じる。この曲がりは、ブレードに取り付けられた回路の抵抗をデフォルト値から変化させる。
ポリマーが膨潤するにつれて、ブレードはより曲がり、しかして抵抗変化を増加する。抵抗応答は、1オングストロームの膨潤当たり1〜4ミリオームの率にて変化し続ける。変換定数は、1〜4ミリオームの範囲を平均して2.5にすることにより求められ得る。2.5ミリオームの応答は1オングストロームの膜膨潤に等しく、そして1オームの応答は400オングストローム(1Ω=400Å)の膜膨潤に等しいことになる。PVA、PIB及びポリ(エチレンビニルアルコール)(PEVA)を含めて、ポリマーの選択物の厚さに対する種々の気体の効果を決定するために、この技法を用いた。これらの3種の異なる材料を、5種の異なる蒸気に暴露した。集められたデータは、各ポリマーに暴露された各気体について有意的に異なる且つ独特の厚さ変化(抵抗応答として測定して)を示した。
上記に記載されたような例示的センサーを、標準感知条件下で感知材料における厚さ変化の測定値を与えるように構築した。この例において、センサーを構築し、そして7:1のPEO:Liの濃度よりなる薄膜感知材料が上に配置されている鉄スラグの表面と接触して置いた。このセンサーとスラグをSFMの磁性据付けステージ上に置き、そして光学顕微鏡及びSFMの伝動装置を用いて、センサーの片持ち梁を各々の有機薄膜の表面上に下げた。
次いで、センサーを乾燥N2ガスに100秒間暴露し、次いで100%水蒸気をN2キャリヤーガス中に100〜700秒において通気し、次いでセンサーを再び乾燥N2に700から1100秒において暴露し、そして最後にセンサーを大気条件に1100から1200秒において暴露した。図16に示されたグラフは、時間の関数として、有機薄膜の膨潤に因る片持ち梁におけるオーム変化を示す。膜の膨潤の量は、100から700秒の範囲における片持ち梁の応答を用いて算出され得る。100から700秒における高値と低値の間の差は5.2オームである。1オーム=400オングストローム=0.04ミクロンという上記に論考された近似変換を用いて、2100オングストローム又は0.21ミクロンの総合厚さ変化が算出され得る。
図17aは、N2をキャリヤーガスとして用いて100%水蒸気の3回の暴露サイクルに付された場合の、7:1の薄膜感知材料と接触しているセンサーの厚さ応答の測定値を示し、そして図17bは、N2をキャリヤーガスとして用いて50%水蒸気の3サイクルに暴露された場合のセンサーを示す。以前のようにSFMステージ上に、スラグを据え付けそして片持ち梁を置いた。膜を乾燥N2に30秒間、次いで水蒸気濃度に30〜600秒において、そして再び乾燥N2に600〜1500秒において暴露した。
これらの試行のすべてについての全体傾向は互いに整合性があり、しかして急な初期膨潤段階及び材料の飽和点近くにおける(700sにおいて)横ばい段階を有する。乾燥N2に暴露された時、ポリマーは、収縮してほぼその膨潤前のレベルに戻った。各連続試行は、その前の試行よりわずかに超えるレベルにて開始した。しかし、各試行についての総合差は、各連続実験について全差のわずかな減少のみで依然一貫性があった。水蒸気暴露についての厚さ応答の差を、最初の5つの低値の平均値から最後の5つの高値の平均値を差し引くことにより算出した。これにより、いかなる極端なデータの影響も減じられた。
3回の100%水蒸気試行についての厚さ応答は、11.2、9.5及び9.5オームであった。50:50の試行について、3つの応答は5.7、5.5、4.8オームであった。400オングストローム=1オームの割合を用いて、これらの差を距離に変換した。100%試行及び50%試行における薄膜の膨潤についてのメジアン値は、それぞれ3800オングストローム及び2200オングストロームである。全膜の元の厚さは、低湿度環境においてDektak製機械を用いて実験前に測定して、315,000オングストローム(31.5ミクロン)であった。膨潤変化を元の厚さで割りそして100倍すると、1.2%(100%蒸気)及び0.69%(50%蒸気)のパーセント膨潤が算出される。データ計算が下記の表2に要約されている(メジアン値は太字にて)。
示されたように、乾燥窒素、100%水蒸気及び標準大気への暴露は、PEO薄膜において有意量の膨潤を生じることが示された。この効果はランダムには起こらないで、100%及び50%水蒸気の反復暴露に関して一貫性があった。該効果はまた、100%水蒸気に暴露された場合に3800オングストロームの厚さ増加でもって測定可能であった。これは、総合膜厚において1.2%増加であった。50%水蒸気における結果は100%における結果の半分であり、しかして検体濃度に対する膜感度を示した。循環される検体蒸気及び乾燥N2の連続試行中、各サイクルの出発点は次サイクルよりわずかに高かったこと並びに各連続実験について差が減少したことが観察された。これは、薄膜中の残留検体に起因した。乾燥N2へのより長い暴露により、過剰の検体は膜から逃散されそしてより一貫性のある出発点が可能にされる。
実施例3
次いで、ディジタルプロセッサーにインターフェイス接続された例示的圧電片持ち梁/マルチメーター及びIDAセンサー/FRAの装置を用いて、PEO薄膜における厚さ及びインピーダンスの変化の同時測定を行った。その際、センサーが検体蒸気に暴露されている時に厚さ及びインピーダンスの変化を同時に測定しそして厚さとインピーダンスの間の関係を定量化するために、実験を行った。第2に、10Hzと178Hz周波数の間の最大抵抗応答、及び応答と溶解パラメーターの間の関係を決定するために、これらの実験を行った。
次いで、ディジタルプロセッサーにインターフェイス接続された例示的圧電片持ち梁/マルチメーター及びIDAセンサー/FRAの装置を用いて、PEO薄膜における厚さ及びインピーダンスの変化の同時測定を行った。その際、センサーが検体蒸気に暴露されている時に厚さ及びインピーダンスの変化を同時に測定しそして厚さとインピーダンスの間の関係を定量化するために、実験を行った。第2に、10Hzと178Hz周波数の間の最大抵抗応答、及び応答と溶解パラメーターの間の関係を決定するために、これらの実験を行った。
例示的センサーを用いての第1調査を100%水蒸気を用いて遂行し、しかしてインピーダンス及び厚さのデータが同時に集められそして相関し得るということを立証する。示されるように、FRAにより生じた信号は、178Hz及び0.1ボルトの正弦波である。実験中、片持ち梁を下げそしてヘッドキャップをセンサー上に置き、そして測定が行われる前に乾燥N2暴露を15分間行った。暴露サイクルは、0〜30秒における乾燥N2、次いで30〜570秒における100%水蒸気、及び最後の570〜600秒についてヘッドキャップの取去りから成っていた。
図18a及び18bは、PEOポリマー薄膜が水蒸気に暴露される場合に起こる表面変化のSFM画像を示す。図18aにおけるSFM画像は、(10:1)のPEO:Liの比率を有するPEO感知材料の試料を示すが、この試料は乾燥N2に暴露されており、そして図18bは、50:50(水蒸気:乾燥窒素)の混合物への暴露後の同じ感知材料を示す。表面図解的な位相差走査を、5ミクロンレベルにて表面について行った。5ミクロンの位相差走査が、下記に示される。図示されているように、図18bの走査におけるポリマー束は、初期走査におけるよりはるかに顕著である。
画像化実験を厚さ及びインピーダンスの測定と相関させると、金属イオンドーピングレベル及び気体の検体暴露がポリマーストランドの構造を変化させ、しかしてそれらを膨潤させそしてより導電性になるようにする、ということが示され得る。
加えて、様々な濃度のPEO薄膜の画像化は、ドープされなかった膜、過塩素酸リチウムでドープされた膜及び重度にドープされた膜の間の構造的相違を示す結果をもたらした。ドーピングの目的は、膜の導電率を増加させることである。膜における物質のタイプ間の相違を示すために、位相差画像化走査を表面に関して遂行した。PEO膜において、より明るい物質の細い分枝状ストランドが存在するのみで、暗い領域が画像走査で優勢である。ドープされた膜において、明色域は膨らんでより厚くなり(21.4:1)、しかしてストランドは高度にドープされた画像(7:1)においてほとんど解離した束になる。3:1及び1:1の走査について、走査は油状表面に関して行われ得なかった。ドーピングレベルは、リチウムの増加濃度と共に薄膜内の構造をより短い及びより丸い束に変化させる。
図18a及び18bに示された水蒸気濃度に暴露された走査において、長いストランドに対する同じ効果(膨らみ効果)が観察された。乾燥膜は明色物質の明らかなストランドを有し、そして水蒸気暴露にてストランドは、ドーピングの増加レベルが示したのと同じように膨らむ。厚さ及びインピーダンスの同時測定において、インピーダンスは検体蒸気への暴露にて降下するのに対して、ポリマーは膨潤してより厚くなる。これは、導電性塩でのポリマーのドーピング又は検体気体への暴露がポリマー膜における顕著な束構造を形成し、しかして膜の厚さ及び導電率を増加するという結論に通じる。
調査の定量結果が、図19に示されている。値は、同じグラフ上ですべての傾向線に合うように目盛られた。総合厚さ変化を、30〜570のサイクルの最後の5つの値を平均しそしてそれらを0〜30秒における最初の5つの値についての平均値から差し引くことにより算出した。計算値は、10.6オーム(4300オングストロームの厚さに変換される)であった。インピーダンス変化を、0〜30秒間の高値と550〜570秒間の低値の差から算出した。この差は、1.2×105オーム又は121,200オームであった。位相角もまた、13.05°の差について42.45°の高値から29.40°の低値に劇的に変化した。
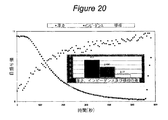
厚さ変化のオングストローム当たりのインピーダンス変化を定量するべき数学的モデル化のために、このデータセットの試行5を選択した。図20に与えられたグラフは、高及び低データの総合差と共に、時間の関数として厚さ、インピーダンス及び移相を示す。図21におけるグラフは、インピーダンス(105オーム)と厚さ(オーム)を線形及び立方の数学的最適でもって相関させる。移相は、その極めて低い約3度の値及び0.77度の変化のために無視される。このグラフは、データの中央における線形領域に関して対称である。最後のプロットは、
Z=190(オーム/オングストローム)×T−36,000(オーム)
の線形最適線でもって、インピーダンス変化(オーム)対厚さ(オングストローム)をモデル化する。
Z=190(オーム/オングストローム)×T−36,000(オーム)
の線形最適線でもって、インピーダンス変化(オーム)対厚さ(オングストローム)をモデル化する。
傾きは、1オングストロームの膨潤を190オームのインピーダンス変化(負方向にて)に相関させる。y切片は36,000オームの値を有し、そしてポリマーのあるタイプの加重段階に関連づけられ、しかしてこの加重段階においては、初期の気体暴露にて厚さは変化するが、インピーダンスは一定のままである(又は178Hzの場合における場合のように実際に増加する)。R2=0.9459の相関係数は、最適をグラフの丁度線形領域に限定することにより改善され得る。
第2調査は、100%水蒸気に暴露される薄膜ポリマー(7:1のPEO:Li)感知材料の厚さ及びインピーダンスの測定から成っていた。2回の試行を178Hzの信号周波数を用いて成し遂げ、そして3回の試行を10Hzの周波数を用いて成し遂げた。各試行において、センサーを、0〜600秒において100%水蒸気に暴露した。次に、センサーを、600〜1500秒において乾燥N2に暴露した。例外は試行3において、100%水蒸気を1200秒まで流したことであった。FRAのデータ保存の制約に因り、インピーダンス及び移相のデータを最初の600秒の間において取った。
実験の2種のデータを同時に取ったが、しかし説明の容易性のために分離した。厚さ変化のデータは、図22aに示されている。それらの傾向は、178Hzと10Hzの間で非常に整合性がある。インピーダンス変化のデータは、図22bに示されている。10Hzデータははるかに高い値約12×105オームにて始まり、平坦な30〜60秒段階を有する。178Hzデータはより低い約8.5×105オームにて始まり、そして初期の30〜60秒段階におけるインピーダンス増加を有する。移相データは、図22cに示されている。178Hzデータは高くすなわち約40度にて始まり、そして有意的に変化する。10Hzデータは低くすなわち約3度にて始まり、そして値の小さい変化しか示さない。
178Hzにおいて取られたデータについての値は、3.2オーム又は1300オングストロームの平均値について2.9と3.5オームの高平均値と低平均値の間の厚さ差を示す。インピーダンス変化を最初の及び最後の30秒の高及び低値から算出し、しかして1.262×105又は126,600オームの平均値について1.392及び1.131×105オーム変化の変化が得られる。移相差を、最初の及び最後の30秒のデータから高及び低値を差し引くことにより算出した。これは、10.26度の平均値について11.71及び8.80度の値を返送した。
10Hzにおいて取られたデータについての値を、178Hzにおける計算と同様にして算出し、しかして4.2オーム又は1700オングストロームのメジアン値について4.0、4.3、4.2オームの厚さ変化が得られる。インピーダンスデータは、2.535×105オーム又は253,500オームのメジアン値について2.535、2.812及び2.490×105オームの差を示す。移相差は、1.13度の平均値について1.48及び0.77度であった。
示されたように、178Hz及び10Hzの場合により測定されたインピーダンス間に大きい差があり、しかして10Hz信号はよりロバストな応答を返送する。しかしながら、厚さ値の差はわずかしか相違せず、そして更なる分析を必要とする。移相データは、178Hzについて角度の予期された高い変化及び10Hzについて角度の実質的に無変化を示す。下記の表3は、周波数変化についての差データを要約する。
第3調査は、水、エタノール、アセトン及びn−オクタン検体蒸気への暴露にて、感知材料(10:1のPEO:Li)を有するセンサーにおける厚さ及びインピーダンスの変化の測定から成っていた。100:0の検体:乾燥N2の比率における各蒸気について、試行を遂行した。水の試行について、センサーを0〜30秒において乾燥N2に、30〜530秒において100:0の混合物に、そして最後の530〜4200秒について再び乾燥N2に暴露した。エタノールの試行について、センサーを0〜30秒において乾燥N2に、30〜360秒においてエタノール蒸気の100%混合物に、そして最後の360〜2500秒について乾燥N2に暴露した。最後に、アセトンの試行について、暴露サイクルは、0〜30秒において乾燥N2、30〜240秒において100%アセトン蒸気、及び240〜900秒において乾燥N2であった。これらのサイクルは、検体蒸気がどれほど速くPEO膜中に吸収されるか及びまたそれがどれほど速く材料を励起するかに依存して時間変動した。
100%水、エタノール(190及び200プルーフ)、アセトン及びn−オクタン蒸気への暴露についての実験3の結果が図23〜26に見られ、また表4及び図27に要約されている。3回の試行を、100%濃度における各検体について成し遂げた。各検体の各試行について、乾燥窒素ガスを0〜30秒においてヘッドキャップ中に吹き込んで、ベースラインの厚さ及びインピーダンスの読取り値を決定した。次いで、厚さ及びインピーダンスの読取り値が横ばいになるまでセンサーを100%検体蒸気に暴露し、しかしてその時点においてポリマーは完全に飽和されたと考えられた。最後段階は、再び、読取り値がベースラインに戻るまでセンサー上に流される乾燥窒素ガスであった。3回の試行を、水、エタノール(190p及び200p)、アセトン及びn−オクタンについて100%蒸気にて成し遂げた。各検体のメジアン試行を、薄膜膨潤のオングストローム変化当たりのインピーダンス変化間の関係について、膨潤段階の間においてグラフ的に及び数学的にモデル化した。
試験された検体において、試行のすべてが、厚さ増加(膨潤)、インピーダンス降下(増加導電率)及び移相増加(n−オクタンの試行3を除いて)を示した。厚さ、インピーダンス及び移相の差を、最初の5つの暴露前のベースライン箇所の平均値から差し引かれた検体膨潤下で集められた最後の5つのデータ箇所の平均値(正値をもたらすように取られた差)を用いて算出した。検体当たり3回の試行の各々間のメジアン値は、容認値であると決定された。このデータが、各検体の溶解パラメーター及び飽和蒸気圧と共に、上記の表4に列挙されている。応答(飽和までのΔT、ΔZ及びΔ時間)、回復時間(ベースライン状態に戻る時間)及び試験中に起こったいかなる問題点をも含む3つの項目が、各有機検体について検討される。
試験された検体のうち、水(図23)が最も大きい厚さ(12.8Ω,5100Å)及びインピーダンス(399,000Ω)の応答を有したが、しかし飽和に達するのに最も長い時間(30〜540秒)かかった。それはまた、約4200秒又は70分における最も長い回復時間を有した。水はまた溶解パラメーターにおいてPEOから最も遠く(48Mpa1/2)、また最も低い飽和蒸気圧(21トル)を有する。
エタノール190プルーフ(図24)は、その次に最も大きい厚さ(9.4Ω,3800Å)及びインピーダンス(219,000Ω)の応答を飽和までの大きい時間(30〜420秒)と共に有した。回復時間は、長くすなわち約1500秒にあった。エタノール190プルーフはその中に多量の水を有し、しかして純エタノールが返送する値より大きい値をもたらすことになる。溶解パラメーター及び飽和蒸気圧は、試料中の水の未知濃度に因り、純エタノールから水の範囲として与えられる(表4において)。エタノール200プルーフはその中に190プルーフより少ない水を有し、そしてその相対物(190プルーフ)より小さい厚さ(4.3Ω,1700Å)及びインピーダンス(79,100Ω)の応答を示した。飽和までの時間もまた、より短くすなわち30〜330秒にあった。回復時間は、アセトンに匹敵しすなわち約1000秒にあった。より小さい水含有率に因り、200プルーフの厚さ及びインピーダンスの変化は190プルーフより小さく、また飽和までの時間は速かった。
アセトン(図25)は、最も小さい厚さ(3.8Ω,1500Å)及びインピーダンス(64,300Ω)の変化を飽和までの最も速い時間(30〜240秒)と共に有した。回復時間もまた、最も短くすなわち約1000秒にあった。アセトンはまた、212トルの最も高い飽和蒸気圧を有する。
n−オクタン(図26)について、厚さは、5.2Ω(2100Å)のメジアン値と共に16.8Ωから0.4Ω(6700Åから200Å)であると測定された。インピーダンス変化は、約100,000Ω減少から800Ω増加であると共に73,900Ω減少のメジアン値であった。応答はすべて、飽和に達するのが遅かった(30〜530秒)。回復時間は、決して回復しないから約3000秒(50分)の範囲にあった。試行は、値の大きい範囲でもって試行1から3に減少した。
最後に、各検体についての感知材料の膨潤段階のモデル化が、図27に示されている。方程式が上部に与えられており、しかして水が78Ω/Åのオングストローム当たりの最も大きいインピーダンス変化を有する。n−オクタン及びアセトンは、最も低くすなわちそれぞれ34Ω/Å及び33Ω/Åである。該方程式は、すべて0.90〜1.00の相関係数でもって、y=ΔZ及びx=ΔTを用いて変換する。
図において、傾きは、ポリマー薄膜感知材料における膨潤のオングストローム当たりのインピーダンス(オームにて)の変化率である。y切片は、ポリマーにおける膨潤前の変化に因るある種の加重段階を指し得る。これらの方程式は、感知材料の飽和が起こるまでの、検体暴露後のポリマーの膨潤段階の間における薄膜感知材料の挙動を示す。指摘されたように、感知材料は各検体に対して相違して応答し、しかして複合的な厚さ/インピーダンスの「フィンガープリント」を与えて、試料中の未知検体を同定することができることを可能にする。
特定的には、モデル化方程式は、各検体についてのサイン傾きを示す。傾きは、膨潤のオングストローム当たりのインピーダンス変化を指す。水が78Ω/Åにおける最も大きい傾きを有し、そしてアセトン及びn−オクタンがそれぞれ33Ω/Å及び34Ω/Åにおける最も低い傾きを分け合った。飽和までの時間を追加パラメーターとして用いると、アセトンとn−オクタンは、飽和までのn−オクタンの長い時間(500秒)と比べて飽和までのアセトンの短い時間(190秒)の故に、容易に識別可能である。これらの関係は、気体の予測及び同定の際に有用であり得る。モデル化方程式は、特定の気体及び濃度に対する薄膜PEOの応答の関係を与える。
検体暴露での飽和までの時間は、溶解パラメーターが24.2Mpa1/2のPEO値により近くなるにつれて及び飽和蒸気圧が増加するにつれて減少した。アセトン(20.5Mpa1/2及び212トル)及びエタノール200p(26Mpa1/2及び52トル)が飽和までの最も速い時間を有し、そして水(溶解パラメーターがPEOから最も遠い48Mpa1/2,最も低い飽和蒸気圧である21トル)が、ポリマーを飽和するのが最も遅かった。厚さ変化及びインピーダンス変化が、図28a及び28bにおいて溶解パラメーターに対するプロットにて相関され、しかして同じ全体応答曲線を示す。本発明に従って行われた例示的試験において見出されるPEOの値は、これらの実験におけるPEOはLiでドープされた故に、24.2の標準値とは異なり得る。
実施例4
本発明によるハイブリッドセンサーは種々の検体を正確に且つ独特的に同定することができることを上記の結果は立証するけれども、本発明のセンサーはまた、試料中の特定検体の濃度を定量することができる。従って、蒸気濃度に対するハイブリッドセンサーの感度を定量するべき調査を行った。厚さ及びインピーダンスの変化を、例示的センサーにおいて、窒素キャリヤーガス中検体蒸気の100%、75%、50%及び25%の濃度に暴露して測定した。水、エタノール、アセトン及びn−オクタンの4種の検体を用いて、検体濃度を試験した。ベースラインの厚さ及びインピーダンスのレベルが乾燥窒素を用いて達成された後、センサー薄膜が飽和されるまで様々な濃度を送達した。厚さにおけるベースライン読取り値が合致するまで、乾燥窒素を再び適用した。
本発明によるハイブリッドセンサーは種々の検体を正確に且つ独特的に同定することができることを上記の結果は立証するけれども、本発明のセンサーはまた、試料中の特定検体の濃度を定量することができる。従って、蒸気濃度に対するハイブリッドセンサーの感度を定量するべき調査を行った。厚さ及びインピーダンスの変化を、例示的センサーにおいて、窒素キャリヤーガス中検体蒸気の100%、75%、50%及び25%の濃度に暴露して測定した。水、エタノール、アセトン及びn−オクタンの4種の検体を用いて、検体濃度を試験した。ベースラインの厚さ及びインピーダンスのレベルが乾燥窒素を用いて達成された後、センサー薄膜が飽和されるまで様々な濃度を送達した。厚さにおけるベースライン読取り値が合致するまで、乾燥窒素を再び適用した。
試行を連続して行い、しかして表5に要約されている。100%蒸気において確立されたレベルからのΔT及びΔZについてのパーセント変化を、各濃度について算出した。図29aにおいて、グラフ的及び数学的モデルを、厚さ変化対P/Psat(100%飽和における濃度と比べての検体のパーセント濃度)について展開した。追加のモデル化をアセトンに関して遂行して、図29bにおいて濃度100%〜25%の各々についての膨潤のオングストローム当たりのインピーダンス変化の率を決定した。
明確な傾向が、様々な濃度データにおいて示されている。4種の検体のすべてについて、厚さ応答についてのピーク高さの差は、蒸気のパーセント濃度が減少するにつれて減少する。厚さ変化とパーセント濃度の間のこの関係は、図29aにおいて1.00近くの相関係数でもって線形最適にて示されており、そして本発明のセンサーが試料中の特定検体の濃度についての定量情報を与えることができることを指摘する。n−オクタンは唯一の例外であり、その線形適合は0.6351の不良な相関係数を有し、そして指数曲線により最良に適合される。示されているように、水において(エタノール及びアセトンにおいてのように)、検体蒸気におけるパーセント濃度が減少する(100%、75%、50%、25%に)につれて、パーセント厚さ変化も減少する(100%、83%、64%、33%に)。インピーダンスは、この線形傾向に従わない(100%、60%、17%、3%に)。再びn−オクタンは、厚さ又はインピーダンスのどちらの変化も25%ステップにて線形減少に従わないので例外である。この調査の結果は、表5に要約されている。
図29bは、様々な濃度におけるアセトンに対する薄膜センサー材料の応答をモデル化する。各濃度は異なる線形最適を有し、傾きは各試行について異なる。これは、オングストローム当たりのインピーダンス変化が検体蒸気と共に変化するのみならず、その蒸気の濃度と共にも変化することを示す。傾きは、100%において40Ω/Å、75%において22Ω/Å、50%において16Ω/Åそして25%において6.7Ω/Åである。完全飽和に対するパーセントは、それぞれ100%、55%、40%及び17%である。これは、線形的に減少する傾向に適合しない。しかしながら、我々がアセトンについてのメジアン試行の方程式(先の100%濃度実験からのΔZ=33ΔT+4700)を用いるならば、傾き値は33Ω/Åであり、そしてパーセント計算値は、線形的に減少する傾向に適合するように変わる。すなわち、100%、67%、49%及び20%。モデル化方程式は、下記の表6(ここで、y=ΔZ及びx=ΔT)に要約されている。
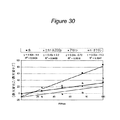
図30の最終モデル化は、4種の検体についての最適線を示す。傾きは[(Ω/Å)/(%濃度)]の単位にてであり、そして存在する検体蒸気を同定する。線に沿った距離は、0%から100%の存在蒸気の濃度を示す。
示されているように、センサーは、検体蒸気のパーセント濃度に対して感度を示す。厚さ対時間のプロットは、パーセント検体が減少するにつれて厚さ応答の明確な減少変化を示す。減少蒸気濃度と共に、減少厚さ変化がもたらされることになる。ΔT対P/Psatは、試験された4種の検体のうち三つについて、厚さ変化と検体蒸気の増加濃度の間で増加線形関係を示す。検体濃度が増加するにつれて、厚さ応答もまた増加する。
n−オクタンは例外であり、しかして0.6351の低い相関係数により示される不良な線形最適を有した。100%から25%の濃度にて遂行された試行は、厚さ変化において指数的により良好な適合を示す。線形性からのこの逸脱は、n−オクタン(CH3(CH2)6CH3)と分子的に同様なPEO(−CH2CH2O−)との相互作用に起因し得る。ポリマーマトリックス中の導電性領域のあるタイプの結合又は充填が、膜膨潤後の回復の欠如、減少応答及び小さいインピーダンス変化の原因となり得る。
アセトンに関して遂行されたモデル化は、膨潤のオングストローム当たりのインピーダンス減少が検体のタイプに依存する(先に示されたように)のみならず、存在濃度にも依存することを示す。たとえば、100%アセトン蒸気についてのモデル化方程式は33Ω/Åの傾きを有し、そして飽和基準として用いられた。75%濃度において傾き(22Ω/Å)は基準の67%であり、50%蒸気において傾き(16Ω/Å)は基準の49%であり、そして25%蒸気において傾き(6.7Ω/Å)は基準の20%であった(直線関係)。蒸気のパーセント濃度が減少するにつれて、ΔZ/ΔTは当量ずつ変化する。
数学的モデル化は、蒸気のタイプ及び濃度を同定するために用いられ得る最適プロットのセットを与える。傾きは、4種の異なる蒸気のどれが存在するかを同定する。線に沿った距離は、存在蒸気の濃度を同定する。従って、2つの異なる未知濃度における厚さ及びインピーダンスの変化の読取り値を取ることにより、検体気体のタイプ及び濃度が本発明によるハイブリッドセンサーにより決定され得る、ということを出願人は示した。
これらの例示的関係を用いると、本発明のハイブリッドセンサーは、試料中の未知検体を同定するためにのみならず、定量するためにも用いられ得る。例示的センサー、検体及び関係が上記の諸例において記載されているけれども、これらは本センサーの有効性の証拠として与えられているにすぎないこと、並びに特定検体の存在に応答して感知材料におけるインピーダンス及び厚さの変化を同時に測定することが可能ないかなるセンサーの組合わせについても、同じタイプの関係が決定及び算出され得ることが理解されるべきである。
慣用ポリマーのみが前記に論考されたけれども、他のポリマーもまた用いられ得る。たとえば、ポリマーを加熱すると、薄膜は液状ゲルに状態変化し、そして決して固体に戻らなかった。無定形物質においてインピーダンスに関して測定されそして図31a〜31cに示された測定値は、検体蒸気に対する増大感度を示す。これは、100%水蒸気においてのより大きいインピーダンス減少にて示される。
上記に論考された例において単一型検出器のみが用いられているけれども、増加分解力(異なる気体間で識別する能力)について、多ポリマー型の検出器のアレイもまた用いられ得る。かかる具体的態様において、各々のものが或るクラスの検体蒸気に対してより大きい又はより小さい感度があるところの多有機物型センサーが、一緒に連結され得る。各々の個々のセンサーの応答データはその他のものに相関されて、より大きい及びより多様なデータセットを与える。このデータセットが既知気体からの前もって測定されたデータと比較される場合、試験された気体の同定及び濃度が確認され得る。
ポリマー検出器のアレイが構築され得、しかしてデータが分析されそして3D原理の成分空間にてプロットされると、特徴的クラスター領域が各々の個々の気体について形成した。これらの分離したクラスターが以前のような化学的同定を示したのみならず、クラスターの長さに沿った点が存在蒸気の濃度も示した。これらの長いクラスターは、各気体についての有効な「フィンガープリント」として働き得る。未知気体について獲得されたフィンガープリントデータは、同定及び濃度の合致の検索の際に、既に保存された気体のフィンガープリントと比較され得る。増加数のセンサーは、システムの増加分解力をもたらすことになる。ハイブリッドセンサーのアレイが用いられる別の例示的具体的態様において、感知材料基板は連続感知材料の単一被膜で被覆され得、また多数の読取り値及び検出される検体(1種又は複数種)のより正確な決定を与えるために、多数のセンサーが感知材料と接触して置かれ得る。
発明者は、様々な濃度の種々の有機検体間で正確に且つ一貫して識別し得るハイブリッドセンサーを発明した。これは、感知材料の薄膜における厚さ変化及びインピーダンス変化の同時の測定及び比較によって達成される。センサーは、異なる溶解パラメーターを有する検体に対して感度がある。一緒に相関された厚さ及びインピーダンスの変化の両方の使用により、検体識別の増加レベルがもたらされた。数学的モデルを用いそして検体蒸気の2つの異なる濃度における厚さ及びインピーダンスの応答を知ることにより、存在する有機検体蒸気の同定及び現時の濃度が同時に同定され得る。
本発明は上記に示された及び記載された例示的具体的態様に限定されるようには意図されていない、ということが現時点にて強調される。むしろ、本発明は、検出されるよう求められる特定検体(1種又は複数種)の存在下における感知材料のインピーダンス及び厚さの変化を測定するハイブリッドセンサーの使用を含む方法及び装置を包含するよう意図されている。
上記の記載は、本発明の原理を説明するにすぎない。本願において明示的には記載されていない又は示されていないけれども、本発明の原理を具体化し且つその精神及び範囲内に含まれる様々な態様を当業者は案出することができる、ということが理解される。更に、本願において詳述されたすべての例及び条件付き言語は、主として、明示的には、教授の目的のためのみであるよう並びに本発明の原理及び本発明者によって当該技術の進歩に寄与された概念を理解する際に読者を助けるよう意図されており、そしてかかる特定的に詳述された例及び条件に限定されないと解釈されるべきである。更に、本発明の原理、側面及び具体的態様並びにそれらの特定例を詳述する本願におけるすべての記述は、それらの構造的及び機能的同等物の両方を包含するよう意図されている。加えて、かかる同等物は現在知られている同等物及び将来において開発される同等物(すなわち、構造に関係なく同じ機能を果たすところの開発されるいかなる要素)の両方を包含する、ということが意図されている。それ故、本発明の範囲は、本願に示された及び記載された例示的具体的態様に限定されるようには意図されていない。むしろ、本発明の範囲及び精神は、添付の請求項により具体化される。
Claims (44)
- 少なくとも1種の検体を検出するためのハイブリッドセンサーであって、
少なくとも1種の検体の存在に対する少なくとも体積応答及びインピーダンス応答を有する感知材料、
該感知材料の体積応答及びインピーダンス応答を測定するための、該感知材料と電気的に及び物理的に接触している少なくとも1個の検出器、及び
該体積応答と該インピーダンス応答を相関させて少なくとも該少なくとも1種の検体の同定を決定するための分析器
を含むハイブリッドセンサー。 - 該分析器が、該少なくとも1種の検体の濃度も決定する、請求項1に記載のハイブリッドセンサー。
- 該検出器が、該感知材料のインピーダンスの測定を容易にするための信号分析器を含む、請求項1に記載のハイブリッドセンサー。
- 該検出器が、該感知材料のインピーダンスを測定するための周波数分析器を含む、請求項1に記載のハイブリッドセンサー。
- 該周波数分析器が、該感知材料への交流の印加により該インピーダンスを検出する、請求項4に記載のハイブリッドセンサー。
- 該検出器が、該感知材料の厚さにおける変化に応答して撓む撓み性アームを有する微小片持ち梁センサーを含む、請求項1に記載のハイブリッドセンサー。
- 該撓み性アームが、該アームが撓む時に変化する少なくとも1つの測定可能な物理的性質を含み、そして該検出器が、該少なくとも1つの測定可能な物理的性質における変化を測定することが更に可能である、請求項6に記載のハイブリッドセンサー。
- 該検出器が、該撓み性アームの該撓みを測定可能な電気信号に変換することが可能な変換器を含む、請求項6に記載のハイブリッドセンサー。
- 該撓み性アームが、その中及びその上の一方において形成されたピエゾ抵抗部材を含み、そして該検出器が、該撓みに因る該ピエゾ抵抗部材の抵抗変化を測定することが可能な電気回路を含む、請求項6に記載のハイブリッドセンサー。
- 該ピエゾ抵抗部材がチタン酸バリウムを含む、請求項9に記載のハイブリッドセンサー。
- 該感知材料が、更なる基板上に配置されている、請求項1に記載のハイブリッドセンサー。
- 該感知材料が表面上に形成されており、そして該撓み性アームが、該感知材料と物理的に接触しており且つ静止位置にある時に該表面に本質的に平行に配置される、請求項6に記載のハイブリッドセンサー。
- 該感知材料が、該少なくとも1種の検体への暴露にてインピーダンス変化及び体積変化を受けるポリマーから形成された化学センサーを含む、請求項1に記載のハイブリッドセンサー。
- 該感知材料が、層状の生体分子又は生体分子を含有する複合物質のどちらか一方から形成された生物学的センサーを含み、しかも該生物学的センサーは、該少なくとも1種の検体を吸着しそして該吸着の結果として体積的に及び電気的に変化することが可能である、請求項1に記載のハイブリッドセンサー。
- 該生物学的センサーが抗体を含む、請求項14に記載のハイブリッドセンサー。
- 該生物学的センサーが、基板上に配置された官能基化DNA鎖を含む、請求項14に記載のハイブリッドセンサー。
- 該少なくとも1種の検体が、二本鎖DNAの相補的DNA鎖を含む、請求項16に記載のハイブリッドセンサー。
- 該感知材料が、ポリビニルアセテート(PVA)、ポリイソブチレン(PIB)、ポリエチレンビニルアセテート(PEVA)、ポリ(4−ビニルフェノール)、ポリ(スチレン−コ−アリルアルコール)、ポリ(メチルスチレン)、ポリ(N−ビニルピロリドン)、ポリ(スチレン)、ポリ(スルホン)、ポリ(メチルメタクリレート)及びポリ(エチレンオキシド)から成る群から選択された少なくとも1種のポリマーマトリックス材料を含む、請求項1に記載のハイブリッドセンサー。
- 該感知材料が、酢酸ニッケル、Pd、Pt及び過塩素酸リチウムから成る群から選択された少なくとも1種の検体感受性ドーパントを含む、請求項1に記載のハイブリッドセンサー。
- 該感知材料が、表面上に形成された別個の材料付着物を含む、請求項1に記載のハイブリッドセンサー。
- 該撓み性アームが、その構成成分として窒化ケイ素を含む、請求項6に記載のハイブリッドセンサー。
- 該少なくとも1種の検体が、気体媒質及び液体媒質の一方内に含められる、請求項1に記載のハイブリッドセンサー。
- 該撓み性アームが、10ミクロンから50ミクロンの範囲の厚さ、25ミクロンから75ミクロンの範囲の幅及び100ミクロンから200ミクロンの範囲の長さを含む、請求項6に記載のハイブリッドセンサー。
- 該検出器が、該撓み性アームの該撓みの程度を測定することが可能である、請求項6に記載のハイブリッドセンサー。
- 該検出器が、0.01Hzと65Hzの間の周波数において該感知材料のインピーダンスを測定する、請求項1に記載のハイブリッドセンサー。
- 該検出器が、10Hzと178Hzの間の周波数において該感知材料のインピーダンスを測定する、請求項1に記載のハイブリッドセンサー。
- 該検出器が、約0.01と0.1Vの間の電圧において該感知材料のインピーダンスを測定する、請求項1に記載のハイブリッドセンサー。
- 検体が揮発性有機物質である、請求項1に記載のハイブリッドセンサー。
- 検体を検出するためのハイブリッドセンサーのアレイであって、
表面上に形成された複数個の別個の感知材料、しかも各感知材料は少なくとも1種の検体の存在下でインピーダンス及び体積の変化を受け、
対応する複数個の検出器、しかも各々の個々の検出器は、該別個の感知材料の少なくとも一つと電気的に及び物理的に接触しておりそして該少なくとも一つの別個の感知材料の体積応答及びインピーダンス応答を測定するためのものであり、及び
該体積応答と該インピーダンス応答を相関させて少なくとも該少なくとも1種の検体の同定を決定するための分析器
を含むハイブリッドセンサーのアレイ。 - 各感知材料が、その他の感知材料とは異なる、請求項29に記載のハイブリッドセンサーのアレイ。
- 該分析器が、検体の各々の濃度を更に決定する、請求項29に記載のハイブリッドセンサーのアレイ。
- 各感知材料が、異なる検体の存在に応答して体積変化を受ける、請求項29に記載のハイブリッドセンサーのアレイ。
- 該検出器の各々が、撓み性アームを含む微小片持ち梁センサーを含み、しかも該撓み性アームは該感知材料と物理的に接触している、請求項29に記載のハイブリッドセンサーのアレイ。
- 該微小片持ち梁センサーの各々が、該撓み性アームと接触しているピエゾ抵抗素子を含む、請求項33に記載のハイブリッドセンサーのアレイ。
- 各々の該ピエゾ抵抗素子が、該対応する感知材料における体積変化に因る該撓み性アームの撓みの結果として抵抗変化を受け、しかも各検出器は、該ピエゾ抵抗素子の抵抗を測定するための電気回路を更に含む、請求項34に記載のハイブリッドセンサーのアレイ。
- 各々の該撓み性アームが、該アームが撓む時に変化する少なくとも1つの測定可能な物理的性質を含み、そして該検出器が、各撓み性アームの該少なくとも1つの測定可能な物理的性質における変化を測定することが可能である、請求項33に記載のハイブリッドセンサーのアレイ。
- 各々の該撓み性アームが、異なる検体に対して測定可能なほど異なって応答する、請求項29に記載のハイブリッドセンサーのアレイ。
- 媒質内の検体を検出する方法であって、
該検体の存在下で少なくとも体積応答及びインピーダンス応答を受ける感知材料を形成し、
該感知材料の体積応答及びインピーダンス応答を測定するための、該感知材料と電気的に及び物理的に接触している少なくとも1個の検出器を準備し、
該検体を含有する媒質を該感知材料に導入し、しかも該媒質は液体及び蒸気の一方であり、
該少なくとも1個の検出器でもって該体積応答及び該インピーダンス応答を測定し、そして
該体積応答及び該インピーダンス応答を分析して少なくとも該少なくとも1種の検体の同定を決定する
ことを含む方法。 - 該検出器が、該感知材料と物理的に接触している撓み性微小片持ち梁アームを含み、しかも該撓み性微小片持ち梁アームは、該微小片持ち梁アームが撓む時に変化する少なくとも1つの測定可能な物理的性質を有し、そして該体積応答の該測定が、該少なくとも1つの測定可能な物理的性質における変化を測定することを含む、請求項38に記載の方法。
- 該微小片持ち梁アームが、その中及びその上の一方においてピエゾ抵抗部材を含み、そして該測定が、該撓みの一つの結果としての該ピエゾ抵抗部材の抵抗変化を測定することを含む、請求項39に記載の方法。
- 該微小片持ち梁アームが、該ピエゾ抵抗部材に結合された2本の導電リード線を含み、そして該測定が、該2本の導電リード線にわたっての抵抗を測定することを含む、請求項39に記載の方法。
- 該測定が、該導入の工程の前及び後の各々にて、該感知材料の抵抗を測定して該感知材料のインピーダンス変化を決定することを含む、請求項38に記載の方法。
- 該検出器が、該感知材料のインピーダンスを測定するための、該感知材料と信号連通している信号分析器を含む、請求項38に記載の方法。
- 該分析が、該検体の濃度を決定することを含む、請求項38に記載の方法。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US38566402P | 2002-06-03 | 2002-06-03 | |
| PCT/US2003/017560 WO2003102218A2 (en) | 2002-06-03 | 2003-06-03 | Hybrid microcantilever sensors |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2005528629A true JP2005528629A (ja) | 2005-09-22 |
| JP2005528629A5 JP2005528629A5 (ja) | 2009-07-16 |
Family
ID=29712198
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2004510454A Pending JP2005528629A (ja) | 2002-06-03 | 2003-06-03 | ハイブリッド微小片持ち梁センサー |
Country Status (8)
| Country | Link |
|---|---|
| US (3) | US6854317B2 (ja) |
| EP (1) | EP1514096B1 (ja) |
| JP (1) | JP2005528629A (ja) |
| CN (1) | CN100565198C (ja) |
| AT (1) | ATE497602T1 (ja) |
| AU (1) | AU2003238869A1 (ja) |
| DE (1) | DE60335950D1 (ja) |
| WO (1) | WO2003102218A2 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2015500501A (ja) * | 2011-12-13 | 2015-01-05 | スリーエム イノベイティブ プロパティズ カンパニー | 気体媒質内の未知の有機化合物の同定及び定量測定方法 |
Families Citing this family (66)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP1514096B1 (en) * | 2002-06-03 | 2011-02-02 | Arizona Board Of Regents Acting for Northern Arizona University | Hybrid microcantilever sensors |
| US7395693B2 (en) * | 2004-12-02 | 2008-07-08 | The Arizona Board of Regents, a body corporate of the state of Arizona acting for Northern Arizona University | Embedded piezoelectric microcantilever sensors |
| US7034677B2 (en) * | 2002-07-19 | 2006-04-25 | Smiths Detection Inc. | Non-specific sensor array detectors |
| US7171312B2 (en) * | 2002-07-19 | 2007-01-30 | Smiths Detection, Inc. | Chemical and biological agent sensor array detectors |
| US7521257B2 (en) | 2003-02-11 | 2009-04-21 | The Board Of Regents Of The Nevada System Of Higher Education On Behalf Of The University Of Nevada, Reno | Chemical sensor with oscillating cantilevered probe and mechanical stop |
| US7260980B2 (en) * | 2003-03-11 | 2007-08-28 | Adams Jesse D | Liquid cell and passivated probe for atomic force microscopy and chemical sensing |
| US20040223884A1 (en) * | 2003-05-05 | 2004-11-11 | Ing-Shin Chen | Chemical sensor responsive to change in volume of material exposed to target particle |
| US7302856B2 (en) * | 2003-05-07 | 2007-12-04 | California Institute Of Technology | Strain sensors based on nanowire piezoresistor wires and arrays |
| US7552645B2 (en) * | 2003-05-07 | 2009-06-30 | California Institute Of Technology | Detection of resonator motion using piezoresistive signal downmixing |
| US7434476B2 (en) * | 2003-05-07 | 2008-10-14 | Califronia Institute Of Technology | Metallic thin film piezoresistive transduction in micromechanical and nanomechanical devices and its application in self-sensing SPM probes |
| US7794657B2 (en) * | 2003-06-03 | 2010-09-14 | Cantimer, Inc. | Phase change sensor |
| US20190357827A1 (en) | 2003-08-01 | 2019-11-28 | Dexcom, Inc. | Analyte sensor |
| US20060257286A1 (en) * | 2003-10-17 | 2006-11-16 | Adams Jesse D | Self-sensing array of microcantilevers for chemical detection |
| US20090288479A1 (en) * | 2003-11-17 | 2009-11-26 | Woody Shane C | Standing wave fluidic and biological tools |
| US8532730B2 (en) | 2006-10-04 | 2013-09-10 | Dexcom, Inc. | Analyte sensor |
| GB2437753B8 (en) | 2004-10-01 | 2009-05-20 | Nevada System Of Higher Education | Cantilevered probe detector with piezoelectric element |
| US11013461B2 (en) | 2004-12-20 | 2021-05-25 | Ipventure, Inc. | Method and apparatus for hydration level of a person |
| US8118740B2 (en) * | 2004-12-20 | 2012-02-21 | Ipventure, Inc. | Moisture sensor for skin |
| US10258278B2 (en) | 2004-12-20 | 2019-04-16 | Ipventure, Inc. | Method and apparatus to sense hydration level of a person |
| US8734341B2 (en) * | 2004-12-20 | 2014-05-27 | Ipventure, Inc. | Method and apparatus to sense hydration level of a person |
| WO2006083566A2 (en) * | 2005-01-28 | 2006-08-10 | Wayne State University | Biosensor based on polymer cantilevers |
| EP1883815A4 (en) * | 2005-05-20 | 2008-10-22 | Univ Rmit | TEST DEVICE |
| JP2009509124A (ja) * | 2005-06-16 | 2009-03-05 | ザ リージェンツ オブ ザ ユニバーシティ オブ カリフォルニア | 大型のパラレルの免疫ベースのアレルギー試験および蛍光のエバネセント場励起のためのデバイス |
| US7946150B2 (en) * | 2005-07-20 | 2011-05-24 | Smiths Detection-Watford Limited | Detection systems |
| US7694734B2 (en) * | 2005-10-31 | 2010-04-13 | Baker Hughes Incorporated | Method and apparatus for insulating a resonator downhole |
| US7313945B2 (en) * | 2005-10-31 | 2008-01-01 | Hewlett-Packard Development Company, L.P. | Cantilevers for sensing fluid properties |
| US7942056B2 (en) * | 2006-01-23 | 2011-05-17 | Drexel University | Self-exciting, self-sensing piezoelectric cantilever sensor |
| US20080011058A1 (en) * | 2006-03-20 | 2008-01-17 | The Regents Of The University Of California | Piezoresistive cantilever based nanoflow and viscosity sensor for microchannels |
| WO2008091294A2 (en) * | 2006-07-28 | 2008-07-31 | California Institute Of Technology | Polymer nems for cell physiology and microfabricated cell positioning system for micro-biocalorimeter |
| RU2009117658A (ru) * | 2006-10-12 | 2010-11-20 | Конинклейке Филипс Электроникс Н.В. (Nl) | Обнаружение состояния среды полностью интегральным преобразовательным устройством на основе гидрогеля |
| JP4899820B2 (ja) * | 2006-11-24 | 2012-03-21 | 株式会社日立製作所 | 凝固センサ |
| WO2008067298A1 (en) * | 2006-11-27 | 2008-06-05 | University Of South Carolina | Method of sensing chemical and bio-molecular analytes and sensing system using a microcantilever |
| US20080160638A1 (en) * | 2006-12-27 | 2008-07-03 | David Lederman | Functionalized Microcantilever Sensor and Associated Method For Detection of Targeted Analytes |
| US8171270B2 (en) * | 2006-12-29 | 2012-05-01 | Intel Corporation | Asynchronous control transfer |
| US8828733B2 (en) * | 2007-01-19 | 2014-09-09 | Cantimer, Inc. | Microsensor material and methods for analyte detection |
| US7751864B2 (en) * | 2007-03-01 | 2010-07-06 | Roche Diagnostics Operations, Inc. | System and method for operating an electrochemical analyte sensor |
| US8168120B1 (en) | 2007-03-06 | 2012-05-01 | The Research Foundation Of State University Of New York | Reliable switch that is triggered by the detection of a specific gas or substance |
| US8191403B2 (en) * | 2007-03-27 | 2012-06-05 | Richmond Chemical Corporation | Petroleum viscosity measurement and communication system and method |
| IL188379A0 (en) * | 2007-04-30 | 2008-11-03 | Ori Gur Ari | Magazine with ammunition status indicator |
| US20090259112A1 (en) * | 2008-04-09 | 2009-10-15 | Searete Llc, A Limited Liability Corporation Of The State Of Delaware | Sensors |
| US20090259217A1 (en) * | 2008-04-09 | 2009-10-15 | Searete Llc, A Limited Liability Corporation Of The State Of Delaware | Methods and systems associated with delivery of one or more agents to an individual |
| CA2737909C (en) * | 2008-09-23 | 2019-03-12 | Siemens Healthcare Diagnostics Inc. | Modulating polarization voltage of amperometric sensors |
| CN102272174B (zh) * | 2008-12-30 | 2015-04-01 | 3M创新有限公司 | 电活性聚合物及含有电活性聚合物的制品 |
| US20110027458A1 (en) | 2009-07-02 | 2011-02-03 | Dexcom, Inc. | Continuous analyte sensors and methods of making same |
| EP2315013B1 (de) * | 2009-10-21 | 2014-06-18 | Micronas GmbH | Feuchtesensor |
| WO2012142502A2 (en) | 2011-04-15 | 2012-10-18 | Dexcom Inc. | Advanced analyte sensor calibration and error detection |
| US8857275B2 (en) | 2011-05-02 | 2014-10-14 | California Institute Of Technology | NEMS sensors for cell force application and measurement |
| US8986337B2 (en) | 2012-02-24 | 2015-03-24 | Elwha Llc | Devices, systems, and methods to control stomach volume |
| US9460264B2 (en) | 2012-05-04 | 2016-10-04 | Elwha Llc | Devices, systems, and methods for automated data collection |
| US10141073B2 (en) | 2012-12-19 | 2018-11-27 | Elwha Llc | Systems and methods for controlling acquisition of sensor information |
| US9375145B2 (en) | 2012-12-19 | 2016-06-28 | Elwha Llc | Systems and methods for controlling acquisition of sensor information |
| US10126259B2 (en) * | 2013-06-14 | 2018-11-13 | Ning Yan | Radio frequency identification (RFID) devices for detecting volatile substances |
| US9864842B2 (en) | 2013-11-14 | 2018-01-09 | Elwha Llc | Devices, systems, and methods for automated medical product or service delivery |
| US10289806B2 (en) | 2013-11-14 | 2019-05-14 | Elwha Llc | Devices, systems, and methods for automated medical product or service delivery |
| US9759648B2 (en) * | 2014-07-03 | 2017-09-12 | The Governors Of The University Of Alberta | Stimulus responsive polymeric system |
| JP2018155576A (ja) * | 2017-03-17 | 2018-10-04 | 太陽誘電株式会社 | 検出素子及び検出装置 |
| FR3066591B1 (fr) * | 2017-05-19 | 2020-10-16 | Senseor | Procede d'optimisation de conception d'un dispositif comprenant des moyens d'interrogation et un capteur passif interrogeable a distance |
| JP6961252B2 (ja) * | 2017-05-31 | 2021-11-05 | 国立研究開発法人物質・材料研究機構 | 低吸湿性材料からなるナノメカニカルセンサ用受容体及びそれを受容体として使用するナノメカニカルセンサ |
| EP3431982A1 (en) * | 2017-07-18 | 2019-01-23 | Nanosurf AG | Microcantilever |
| US11331019B2 (en) | 2017-08-07 | 2022-05-17 | The Research Foundation For The State University Of New York | Nanoparticle sensor having a nanofibrous membrane scaffold |
| US10191036B1 (en) | 2018-03-22 | 2019-01-29 | NUB4U, Inc. | System for detecting and removing biological analytes in fluids |
| EP3779420B8 (en) * | 2018-03-29 | 2023-05-24 | Mitsui Chemicals, Inc. | Sensor, detecting method, and sensor manufacturing method |
| CN113788502B (zh) * | 2021-08-17 | 2023-02-17 | 天津大学 | 一种用于水环境中磷酸根离子浓度判别的材料制备及检测方法 |
| CN114018985A (zh) * | 2021-11-03 | 2022-02-08 | 中国计量大学 | 一种基于物联网技术的生物病毒浓度检测仪 |
| CN114543711B (zh) * | 2022-01-23 | 2023-08-25 | 中南大学 | 一种气体距离测量系统传感数据处理方法 |
| WO2023196320A1 (en) * | 2022-04-04 | 2023-10-12 | Virginia Tech Intellectual Properties,Inc. | 3d-printed, well plate-integrated piezoelectric cantilever sensors for cell culture monitoring |
Family Cites Families (34)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US2509593A (en) * | 1947-05-21 | 1950-05-30 | Rca Corp | Humidity compensated oscillator |
| US3260104A (en) * | 1962-10-22 | 1966-07-12 | Exxon Research Engineering Co | Apparatus for fluid analysis |
| US3523244A (en) * | 1967-11-01 | 1970-08-04 | Panametrics | Device for measurement of absolute humidity |
| US4361026A (en) * | 1980-06-24 | 1982-11-30 | Muller Richard S | Method and apparatus for sensing fluids using surface acoustic waves |
| US4708019A (en) * | 1984-06-27 | 1987-11-24 | Gte Laboratories Incorporated | Measurement of strain employing a piezoresistive blend of a doped acetylene polymer and an elastomer |
| US4631952A (en) * | 1985-08-30 | 1986-12-30 | Chevron Research Company | Resistive hydrocarbon leak detector |
| US5028394A (en) * | 1990-04-13 | 1991-07-02 | Bend Research, Inc. | Chemical sensors |
| JPH05196458A (ja) * | 1991-01-04 | 1993-08-06 | Univ Leland Stanford Jr | 原子力顕微鏡用ピエゾ抵抗性片持ばり構造体 |
| JP3358851B2 (ja) * | 1993-03-11 | 2002-12-24 | 本田技研工業株式会社 | 感湿性アクチュエータ |
| AU6770394A (en) * | 1993-05-25 | 1994-12-20 | Rosemount Inc. | Organic chemical sensor |
| US5445008A (en) * | 1994-03-24 | 1995-08-29 | Martin Marietta Energy Systems, Inc. | Microbar sensor |
| JP3323343B2 (ja) * | 1994-04-01 | 2002-09-09 | 日本碍子株式会社 | センサ素子及び粒子センサ |
| US5536963A (en) * | 1994-05-11 | 1996-07-16 | Regents Of The University Of Minnesota | Microdevice with ferroelectric for sensing or applying a force |
| US5679888A (en) * | 1994-10-05 | 1997-10-21 | Matsushita Electric Industrial Co., Ltd. | Dynamic quantity sensor and method for producing the same, distortion resistance element and method for producing the same, and angular velocity sensor |
| US5771902A (en) * | 1995-09-25 | 1998-06-30 | Regents Of The University Of California | Micromachined actuators/sensors for intratubular positioning/steering |
| US5719324A (en) | 1995-06-16 | 1998-02-17 | Lockheed Martin Energy Systems, Inc. | Microcantilever sensor |
| US6196052B1 (en) | 1996-01-17 | 2001-03-06 | Advanced Technology Materials, Inc. | Piezoelectric gas sensing device for detection of a gas species a gaseous environment |
| AU7671696A (en) | 1996-01-18 | 1997-08-11 | University Of New Mexico | Soft actuators and artificial muscles |
| US6054277A (en) * | 1996-05-08 | 2000-04-25 | Regents Of The University Of Minnesota | Integrated microchip genetic testing system |
| JPH1038789A (ja) | 1996-05-22 | 1998-02-13 | Ngk Insulators Ltd | 流体センサ |
| US5955659A (en) | 1998-01-13 | 1999-09-21 | Massachusetts Institute Of Technology | Electrostatically-actuated structures for fluid property measurements and related methods |
| US6016686A (en) | 1998-03-16 | 2000-01-25 | Lockheed Martin Energy Research Corporation | Micromechanical potentiometric sensors |
| US6287765B1 (en) | 1998-05-20 | 2001-09-11 | Molecular Machines, Inc. | Methods for detecting and identifying single molecules |
| US6041642A (en) | 1998-06-04 | 2000-03-28 | Lockheed Martin Energy Systems, Inc. | Method and apparatus for sensing the natural frequency of a cantilevered body |
| US6201980B1 (en) | 1998-10-05 | 2001-03-13 | The Regents Of The University Of California | Implantable medical sensor system |
| US6183097B1 (en) * | 1999-01-12 | 2001-02-06 | Cornell Research Foundation Inc. | Motion amplification based sensors |
| JP2000214072A (ja) | 1999-01-27 | 2000-08-04 | Akira Kawai | カンチレバ―型の吸着センサ―並びに吸着力解析方法 |
| US6289717B1 (en) * | 1999-03-30 | 2001-09-18 | U. T. Battelle, Llc | Micromechanical antibody sensor |
| US6475750B1 (en) | 1999-05-11 | 2002-11-05 | M-Biotech, Inc. | Glucose biosensor |
| US6514689B2 (en) | 1999-05-11 | 2003-02-04 | M-Biotech, Inc. | Hydrogel biosensor |
| US6447887B1 (en) | 1999-09-14 | 2002-09-10 | Virginia Tech Intellectual Properties, Inc. | Electrostrictive and piezoelectric thin film assemblies and method of fabrication therefor |
| US6523392B2 (en) * | 2000-01-25 | 2003-02-25 | Arizona Board Of Regents | Microcantilever sensor |
| WO2001081857A2 (en) | 2000-04-20 | 2001-11-01 | The University Of Bristol | Resonant probe driving arrangement and scanning probe microscope |
| EP1514096B1 (en) * | 2002-06-03 | 2011-02-02 | Arizona Board Of Regents Acting for Northern Arizona University | Hybrid microcantilever sensors |
-
2003
- 2003-06-03 EP EP03734383A patent/EP1514096B1/en not_active Expired - Lifetime
- 2003-06-03 AU AU2003238869A patent/AU2003238869A1/en not_active Abandoned
- 2003-06-03 JP JP2004510454A patent/JP2005528629A/ja active Pending
- 2003-06-03 US US10/454,346 patent/US6854317B2/en not_active Expired - Fee Related
- 2003-06-03 US US10/454,344 patent/US6823717B2/en not_active Expired - Fee Related
- 2003-06-03 DE DE60335950T patent/DE60335950D1/de not_active Expired - Lifetime
- 2003-06-03 AT AT03734383T patent/ATE497602T1/de not_active IP Right Cessation
- 2003-06-03 WO PCT/US2003/017560 patent/WO2003102218A2/en active Application Filing
- 2003-06-03 CN CN03817310.7A patent/CN100565198C/zh not_active Expired - Fee Related
-
2004
- 2004-12-02 US US11/004,555 patent/US7168294B2/en not_active Expired - Fee Related
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2015500501A (ja) * | 2011-12-13 | 2015-01-05 | スリーエム イノベイティブ プロパティズ カンパニー | 気体媒質内の未知の有機化合物の同定及び定量測定方法 |
| US9658198B2 (en) | 2011-12-13 | 2017-05-23 | 3M Innovative Properties Company | Method for identification and quantitative determination of an unknown organic compound in a gaseous medium |
Also Published As
| Publication number | Publication date |
|---|---|
| US6823717B2 (en) | 2004-11-30 |
| EP1514096A2 (en) | 2005-03-16 |
| CN1714291A (zh) | 2005-12-28 |
| US7168294B2 (en) | 2007-01-30 |
| US20040211243A1 (en) | 2004-10-28 |
| ATE497602T1 (de) | 2011-02-15 |
| WO2003102218A3 (en) | 2004-04-15 |
| AU2003238869A1 (en) | 2003-12-19 |
| US20060053871A1 (en) | 2006-03-16 |
| EP1514096A4 (en) | 2009-05-27 |
| EP1514096B1 (en) | 2011-02-02 |
| CN100565198C (zh) | 2009-12-02 |
| WO2003102218A2 (en) | 2003-12-11 |
| US6854317B2 (en) | 2005-02-15 |
| US20040194534A1 (en) | 2004-10-07 |
| AU2003238869A8 (en) | 2003-12-19 |
| DE60335950D1 (de) | 2011-03-17 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US6823717B2 (en) | Hybrid microcantilever sensors | |
| Parikh et al. | Flexible vapour sensors using single walled carbon nanotubes | |
| US6221673B1 (en) | Materials, method and apparatus for detection and monitoring of chemical species | |
| US20230184755A1 (en) | Analyte detection using electrochemical impedance spectroscopy-based imaginary impedance measurement | |
| US9429536B2 (en) | Airborne contaminant sensor device and method for using the same | |
| US20040126814A1 (en) | Sensor having molecularly imprinted polymers | |
| Diakowski et al. | Impedance based detection of chemical warfare agent mimics using ferrocene-lysine modified carbon nanotubes | |
| US20090017197A1 (en) | IrOx nanowire protein sensor | |
| US20030010097A1 (en) | Microcantilever sensor | |
| US20050150778A1 (en) | Use of basic polymers in carbon black composite vapor detectors to obtain enhanced sensitivity and classification performance for volatile fatty acids | |
| JP2005528629A5 (ja) | ||
| Shi et al. | A one-piece lateral flow impedimetric test strip for label-free clenbuterol detection | |
| Pan et al. | Interface and sensitive characteristics of the viscoelastic film used in a surface acoustic wave gas sensor | |
| CN107085022B (zh) | 3-硝基酪氨酸的分子印迹电化学传感器的制备及应用 | |
| Harsányi | Polymeric sensing films: new horizons in sensorics? | |
| Himori et al. | Free-standing conductive hydrogel electrode for potentiometric glucose sensing | |
| US11536721B2 (en) | Electrochemical immunosensors | |
| Cai et al. | C2-symmetric benzene-based low molecular weight hydrogel modified electrode for highly sensitive detection of copper ions | |
| JP4464270B2 (ja) | 埋込み圧電微小片持ち梁センサー | |
| Pioggia et al. | Characterization of a carbon nanotube polymer composite sensor for an impedimetric electronic tongue | |
| WO2021253130A1 (en) | Printed biosensors designs using multiple functionalized electrodes | |
| US20070141683A1 (en) | Selective electrode for benzene and benzenoid compounds | |
| WO2023245285A1 (en) | Electrochemical biosensors and method of manufacturing electrochemical biosensors | |
| US20230213429A1 (en) | Systems and methods for detecting aerosolized viral particles | |
| WO2023137534A1 (pt) | Transdutor modificado, mecanismo de transdução e método de detecção e/ou quantificação de espécies de interesse analítico com transdutor modificado |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20060227 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20090224 |
|
| A524 | Written submission of copy of amendment under article 19 pct |
Free format text: JAPANESE INTERMEDIATE CODE: A524 Effective date: 20090522 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20090623 |