JP2005500454A - 機械装置 - Google Patents
機械装置 Download PDFInfo
- Publication number
- JP2005500454A JP2005500454A JP2003520981A JP2003520981A JP2005500454A JP 2005500454 A JP2005500454 A JP 2005500454A JP 2003520981 A JP2003520981 A JP 2003520981A JP 2003520981 A JP2003520981 A JP 2003520981A JP 2005500454 A JP2005500454 A JP 2005500454A
- Authority
- JP
- Japan
- Prior art keywords
- central axis
- gyro element
- axis
- gyro
- mechanical device
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
- 238000006073 displacement reaction Methods 0.000 claims abstract description 8
- 238000000034 method Methods 0.000 claims description 20
- 230000000694 effects Effects 0.000 description 6
- 230000001141 propulsive effect Effects 0.000 description 3
- 239000000463 material Substances 0.000 description 2
- 230000001133 acceleration Effects 0.000 description 1
- 230000003213 activating effect Effects 0.000 description 1
- 238000006243 chemical reaction Methods 0.000 description 1
- 238000004519 manufacturing process Methods 0.000 description 1
- 230000007704 transition Effects 0.000 description 1
Images




Classifications
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F03—MACHINES OR ENGINES FOR LIQUIDS; WIND, SPRING, OR WEIGHT MOTORS; PRODUCING MECHANICAL POWER OR A REACTIVE PROPULSIVE THRUST, NOT OTHERWISE PROVIDED FOR
- F03G—SPRING, WEIGHT, INERTIA OR LIKE MOTORS; MECHANICAL-POWER PRODUCING DEVICES OR MECHANISMS, NOT OTHERWISE PROVIDED FOR OR USING ENERGY SOURCES NOT OTHERWISE PROVIDED FOR
- F03G3/00—Other motors, e.g. gravity or inertia motors
- F03G3/08—Other motors, e.g. gravity or inertia motors using flywheels
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10—TECHNICAL SUBJECTS COVERED BY FORMER USPC
- Y10T—TECHNICAL SUBJECTS COVERED BY FORMER US CLASSIFICATION
- Y10T74/00—Machine element or mechanism
- Y10T74/12—Gyroscopes
- Y10T74/1204—Gyroscopes with caging or parking means
Landscapes
- Engineering & Computer Science (AREA)
- Combustion & Propulsion (AREA)
- Chemical & Material Sciences (AREA)
- Mechanical Engineering (AREA)
- General Engineering & Computer Science (AREA)
- Motorcycle And Bicycle Frame (AREA)
- Surgical Instruments (AREA)
- Glass Compositions (AREA)
- Mechanical Control Devices (AREA)
- Friction Gearing (AREA)
- Manipulator (AREA)
- Press Drives And Press Lines (AREA)
- Transmission Devices (AREA)
- Pens And Brushes (AREA)
- Power Steering Mechanism (AREA)
Abstract
中心軸(3)の回りを回転するように制約され、かつ、そこから離れて位置するジャイロ素子(9)(10)を備える機械装置であって、ジャイロ素子(9)(10)は回転軸を有し、その回転軸が中心軸(3)又は中心軸3の近くを通過する第1の向きと、その回転軸が中心軸(3)からのジャイロ素子の変位に対して実質的に垂直である第2の向きとの間を移動可能であることを特徴とする機械装置。
Description
【技術分野】
【0001】
本発明は機械装置、特にジャイロ(ジャイロスコープ)回転の現象を応用する機械装置に関する。
【背景技術】
【0002】
ジャイロの原理は周知のものであり、端的に言えば、ジャイロスコープ又は回転ホイールは、その回転軸の方向(軸角)を変えるように加えられた力に比例し、その回転体の直径及び回転スピードに依存する速さで、且つその回転軸の方向を変えるように加えられた力に対し90°の方向に歳差運動を行い又はその元の回転軸の方向(軸角)を変える。
【0003】
したがって、回転ホイールが車軸の一端に取り付けられ、その車軸の他端が支持体の上に載っているとき、その回転ホイールは、ホイールが十分な速さで回転している限り、一つにはホイールの重量から生じる下方への力に拮抗するように作用し、また一つにはホイールに対して水平力を与えるように作用するトルクによって、水平面における歳差運動を行う。
【発明の開示】
【発明が解決しようとする課題】
【0004】
本発明は、この原理を利用する機械装置を提供することを目的とする。
【課題を解決するための手段】
【0005】
本発明の第一の側面は、機械装置を提供することであり、該機械装置は、中心軸の回りを回転するように制約され、かつ、その中心軸から離れて位置するジャイロ素子を備え、該ジャイロ素子は回転軸を有し、その回転軸が中心軸又はそれの近くを通る第1の向きと、その回転軸が該中心軸からのジャイロ素子の変位の方向に対して実質的に垂直である第2の向きとの間を移動可能であることを特徴とする。
【0006】
好都合には、機械装置は一対のジャイロ素子を備える。好ましくは、機械装置は中心シャフトを備え、中心軸は実質的に中心シャフトの長手方向の軸から成る。さらに有利には、ジャイロ素子はアームにより中心軸の回りを回転するように制約されている。
【0007】
好都合には、アームは、該アームが中心軸に対する第1の角度を定める第1の位置と、該アームが中心軸に対する第2の角度を定める第2の位置との間を移動可能であり、第1の角度は第2の角度より大きい。
好ましくは、第1の位置において、アームは中心軸に対して実質的に垂直である。有利には、機械装置は、さらにアームを第2の位置から第1の位置に、移動操作が可能であるアーム復元装置を備える。
【0008】
好都合には、アームは中心軸の回りを旋回可能に取り付けられている。好ましくは、機械装置は、さらに中心軸に沿って摺動可能に取り付けられているスライダを備え、該スライダはアームの長さ方向の所定位置でコネクタにより接続されている。有利には、機械装置は、さらにジャイロ素子を第1の向きと第2の向きとの間を移動操作できるジャイロ位置決め装置を備える。
本発明の別の側面は、上述した機械装置を備える車両(乗り物)を提供する。
【0009】
本発明のさらに別の側面は、機械装置を操作する方法であって、その方法は中心軸の回りを回転するように制約され、かつ、そこから離間されたジャイロ素子を提供するものであり、該ジャイロ素子は回転軸を有し、その回転軸が該中心軸又はその近くを通る第1の向きと、その回転軸が該中心軸からのジャイロ素子の変位の方向に対して実質的に垂直である第2の向きとの間を移動可能であることを特徴とするジャイロ素子を準備する工程(ステップ)と、ジャイロ素子を第1の向きに配置する工程と、回転軸が中心軸に対して第1の角度を定めるように、ジャイロ素子を第1の位置に配置する工程と、ジャイロ素子を中心軸回りに回転させる工程と、ジャイロ素子を、その回転軸が中心軸に対して第一の角度より小さい第2の角度を定めるように、第2の位置への移動を可能にする工程と、ジャイロ素子を第2の向きに移す工程と、ジャイロ素子を第1の位置に戻す工程と、ジャイロ素子を第1の向きに移す工程とから成る。
【0010】
好都合には、機械装置の操作方法は一対のジャイロ素子を提供する工程を含む。好ましくは、中心軸の回りを回転するように制約されたジャイロ素子を提供する工程は、中心軸の回りを回転するように制約されているアームにジャイロ素子を取り付ける工程を含む。
有利には、ジャイロ素子を第1の位置に配置するステップは、アームをシャフトの中心軸に対して実質的に直角に配置する工程を含む。
好都合には、機械装置の操作方法はさらに、中心シャフトを提供する工程を含み、中心軸は実質的に中心シャフトの長手方向軸を含む。
本発明のさらに別の側面は、上記工程を繰り返すことから成る機械装置の操作方法を提供する。
【発明の効果】
【0011】
本発明は、ジャイロ効果を利用した有用な装置を提供するものであり、該装置は正味の直線推力を発生させることができる。
【発明を実施するための最良の形態】
【0012】
本発明の理解をさらに容易にするために、以下添付図面を参照しながら実施例により本発明を具体的に説明する。
まず、図1を参照すると、本発明を具体的に示す機械装置1は中心シャフト2を備え、該中心シャフトはその中心軸3の回りを回転可能になっている。
第1及び第2のアーム4、5が中心軸3の回りを旋回可能に取り付けられている。該アーム4、5は、アーム4、5がシャフト2の中心軸3に対して実質的に垂直になる第1の位置と、アーム4、5がシャフト2の中心軸3に対してより小さい角度を定める第2の位置との間を移動可能である。
【0013】
スライダ6は中心シャフト2に摺動可能に取り付けられており、第1及び第2の支持体7、8は、第1及び第2のアーム4、5の長さに沿う途中の位置でスライダ6に接続する。
好ましくは、中央シャフト2、第1及び第2のアーム4、5、並びに第1及び第2支持体7、8は頑丈な硬い材料で作られる。
第1及び第2のアーム4、5の遠端には、それぞれ第1及び第2のジャイロ素子9、10が取り付けられている。ジャイロ素子9、10のそれぞれは回転軸の回りを回転可能になっている。
【0014】
第1及び第2のジャイロ素子9、10は第1及び第2のアーム4、5に取り付けられており、ジャイロ素子のそれぞれは、その回転軸がシャフト2の中心軸3又はその近くを通過する第1の向きと、その回転軸がシャフト2の中心軸3からのジャイロ素子9、10の変位の方向に対して、実質的に垂直である第2の向きとの間を移動可能になっている。
【0015】
第1及び第2のジャイロ素子9、10のそれぞれはモーター11、12を備えており、これによりそれぞれの回転軸の回りに回転可能になっている。
機械装置1を操作するに当たって、上述したように、まずアーム4、5を第1の位置に設置する。ジャイロ素子9、10を第1の向きに設定すると、機械装置1は第1の配置になる。
ジャイロ素子9、10の回転をモーター11、12を起動することにより開始し、中心シャフト2をその中心軸3の回りに回転する。シャフト2は一方向に連続回転することが可能であるが、交互に振動回転(オシレート回転)させることも可能であることが理解できるであろう。
【0016】
中心シャフト2の回転(よってアーム4、5も同様に回転する)によって各ジャイロ素子9、10の各々が受ける求心力(向心力)は、2個のジャイロ素子間の軸角(回転軸間の角度)が変更するように作用することが理解されるであろう。
従って、上述したように、ジャイロ素子9、10の各々に対して、軸角を変えるように加えられる力に対して、90度の方向に力(合力)が作用し、そしてこの力が、実質的にジャイロ素子9、10の面内(同一面内)に存在する。すなわち、この力(合力は)シャフト2の中心軸3と実質的に平行であることが理解されるであろう。したがって、ジャイロ素子9、10はこの方向に移動する。
【0017】
上述した回転ホイールの例を参照すると、本発明の構成は同様の状況を提供する。つまり、回転体に作用する力は、その力に対して直角にトルクを発生させるのではなく、回転体に作用するトルクは、そのトルクに対して直角の力を発生させる。
この動作により、ジャイロ素子9、10はアーム4、5を第2の位置に移動させ、同時にスライダ6をジャイロ素子9、10の移動方向に中心シャフト2に沿って移動させる。これにより、機械装置1は第2の配置になる。また、機械装置1には反対方向の力が作用しないので、機械装置1がジャイロ素子9、10の移動方向に推進力を受けることが分かる。
【0018】
一旦アーム4、5が第2の位置に移動すると、上述したように、ジャイロ素子9、10は第2の向きに移動する。これにより、機械装置1は第3の配置になる。ジャイロ素子9、10がそのような向きに置かれると、中心シャフト2の回転により発生する求心加速度に起因して、ジャイロ素子9、10に作用する力はジャイロ素子9、10の軸角を変更するように作用しないので、ジャイロ素子9、10にはジャイロ効果に起因する力が殆ど又は全く作用しないことが理解されるであろう。
【0019】
ジャイロ素子9、10が第2の配置を取るとともに、アーム4、5が第1の位置に戻り、機械装置1は第4の配置になる。この動きの間に、機械装置1に作用する正味の力は存在せず、従って、ジャイロ素子9、10が第1の向きにある間に、機械装置に与えられる推進力は反対方向の力を受けないことが分かるであろう。
【0020】
アーム4、5が第1の位置に戻る動きは、中心シャフトの回転に起因して起こる。すなわち、この回転によりアームは効果的に外側に投げ出される。
また、これはアーム4、5を第1の位置に戻すための他の手段(例えばモーター)を設けることによっても可能である。そして、ジャイロ素子9、10は第1の向きに戻り、機械装置1がサイクルスタート時の第1の構成を取ることが理解されるであろう。
機械装置1に、最初に加えられたのと同じ方向に、再度推進力が加わることにより、このサイクルが繰り返される(以下同様)。このようにして機械装置1は、中心シャフト2と平行又は実質的に平行な方向に正味の直線運動を行うことができる。
【0021】
本発明の実用的な例として、可動部の運動量を増し、各動作サイクル間の機械装置1の動作量を増すために、機械装置1の一部に重りを付加することが必要であるかも知れない。
付加的な重りはスライダ6の上、又はその周りに設置することが好ましい。スライダ6それ自身を、十分な大きさの高密度の材料で形成してもよく、又は製造後に重りを加えてもよい。
【0022】
上記動作サイクルの間に、スライダ6は、第1の配置から第2の配置への移行する間に、シャフト2に沿って一定の距離を第1の方向に移動する。サイクルの復帰に際しては(すなわち、第3から第4の形態への動作期間中)、スライダは第1の方向とは反対の方向に移動する。一方、中心シャフト2は、戻り期(相)にある間、スライダ6の動きへの反作用として第1の方向に移動する。これら動作の正味の効果が、機械装置1全体が第1の方向への直線運動することが理解される。
【0023】
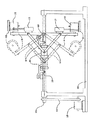
図5は、本発明の機械装置1をさらに具体的に示すものであり、機械装置1は中心シャフト2が取り付けられる基部13を含み、該中心シャフト2は、駆動シャフト15にまたがる駆動ベルト14によって回転し、主モーター16によって駆動シャフトを駆動する。ジャイロ素子9、10を第1及び第2の向きの間を動かすための第1及び第2のアクチュエータ17、18が備えられ、アーム4、5の第1及び第2のそれぞれ相当する位置に、スライダ6を固定するためのソレノイドラッチ19、20が備えられる。
【0024】
図5には、機械装置1の第1及び第3の配置が示されており、第3の配置は点線で示されている。
当業者であれば、本発明は他の方法でも効果を発揮することが理解される。本発明は図5に示す配置に限定されない。
一対以上のジャイロ素子を、関連するアームやシャフトとともに任意に備えることができる。当業者であれば、そのような複数対の具体的な運用方法は用意に理解される。
【0025】
上記の説明において、ジャイロ素子9、10のそれぞれは、その回転軸がシャフト2の中心軸3又はその近くを通過する時に、第1の向きにあると記述している。この第1の向きは、回転軸のベクトルを中心軸3に平行な方向及び垂直な方向の成分に分解するとき、垂直成分が該ベクトルの主要部を占めるような状況に対応すると理解される。
同様に、ジャイロ素子9、10のそれぞれはその回転軸がシャフト2の中心軸3からのジャイロ素子9、10の変位に対して実質的に垂直である時に、第2の向きにあると記述されている。
そして、この第2の向きは、回転軸ベクトルを、中心軸3からのジャイロ素子9、10の変位に対し平行及び垂直な成分に分解するとき、垂直成分が該ベクトルの主要部を占める状況に対応すると理解される。
【0026】
本発明は、ジャイロ効果を利用した有用な装置を提供するものであり、該装置は正味の直線推力を発生させるために利用できる。
本明細書において「備える」とは「含む又は構成される」ことを意味し、「備えている」とは「含んでいる又は構成されている」ことを意味する。
説明書中に開示した本発明の態様、請求の範囲、又は各様態の、上記と同様に特定の形態として、若しくは開示した機能を発揮させるための手段として表現した付属図面、又は方法若しくは開示した結果を得るためのプロセスは、適切に、単独若しくは記述した様態のすべての組み合わせで、本発明の広範な形態を実現するために用いられる。
【産業上の利用可能性】
【0027】
ジャイロ効果を利用した有用な装置を提供するものであり、該装置は正味の直線推力を発生させるために利用できる。
【図面の簡単な説明】
【0028】
【図1】本発明の実施例に基づく装置の第1配置図である。
【図2】図1に示した装置の第2配置図である。
【図3】図1に示した装置の第3配置図である。
【図4】図1に示した装置の第4配置図である。
【図5】図1に示した装置の追加の部品を示す。
【0001】
本発明は機械装置、特にジャイロ(ジャイロスコープ)回転の現象を応用する機械装置に関する。
【背景技術】
【0002】
ジャイロの原理は周知のものであり、端的に言えば、ジャイロスコープ又は回転ホイールは、その回転軸の方向(軸角)を変えるように加えられた力に比例し、その回転体の直径及び回転スピードに依存する速さで、且つその回転軸の方向を変えるように加えられた力に対し90°の方向に歳差運動を行い又はその元の回転軸の方向(軸角)を変える。
【0003】
したがって、回転ホイールが車軸の一端に取り付けられ、その車軸の他端が支持体の上に載っているとき、その回転ホイールは、ホイールが十分な速さで回転している限り、一つにはホイールの重量から生じる下方への力に拮抗するように作用し、また一つにはホイールに対して水平力を与えるように作用するトルクによって、水平面における歳差運動を行う。
【発明の開示】
【発明が解決しようとする課題】
【0004】
本発明は、この原理を利用する機械装置を提供することを目的とする。
【課題を解決するための手段】
【0005】
本発明の第一の側面は、機械装置を提供することであり、該機械装置は、中心軸の回りを回転するように制約され、かつ、その中心軸から離れて位置するジャイロ素子を備え、該ジャイロ素子は回転軸を有し、その回転軸が中心軸又はそれの近くを通る第1の向きと、その回転軸が該中心軸からのジャイロ素子の変位の方向に対して実質的に垂直である第2の向きとの間を移動可能であることを特徴とする。
【0006】
好都合には、機械装置は一対のジャイロ素子を備える。好ましくは、機械装置は中心シャフトを備え、中心軸は実質的に中心シャフトの長手方向の軸から成る。さらに有利には、ジャイロ素子はアームにより中心軸の回りを回転するように制約されている。
【0007】
好都合には、アームは、該アームが中心軸に対する第1の角度を定める第1の位置と、該アームが中心軸に対する第2の角度を定める第2の位置との間を移動可能であり、第1の角度は第2の角度より大きい。
好ましくは、第1の位置において、アームは中心軸に対して実質的に垂直である。有利には、機械装置は、さらにアームを第2の位置から第1の位置に、移動操作が可能であるアーム復元装置を備える。
【0008】
好都合には、アームは中心軸の回りを旋回可能に取り付けられている。好ましくは、機械装置は、さらに中心軸に沿って摺動可能に取り付けられているスライダを備え、該スライダはアームの長さ方向の所定位置でコネクタにより接続されている。有利には、機械装置は、さらにジャイロ素子を第1の向きと第2の向きとの間を移動操作できるジャイロ位置決め装置を備える。
本発明の別の側面は、上述した機械装置を備える車両(乗り物)を提供する。
【0009】
本発明のさらに別の側面は、機械装置を操作する方法であって、その方法は中心軸の回りを回転するように制約され、かつ、そこから離間されたジャイロ素子を提供するものであり、該ジャイロ素子は回転軸を有し、その回転軸が該中心軸又はその近くを通る第1の向きと、その回転軸が該中心軸からのジャイロ素子の変位の方向に対して実質的に垂直である第2の向きとの間を移動可能であることを特徴とするジャイロ素子を準備する工程(ステップ)と、ジャイロ素子を第1の向きに配置する工程と、回転軸が中心軸に対して第1の角度を定めるように、ジャイロ素子を第1の位置に配置する工程と、ジャイロ素子を中心軸回りに回転させる工程と、ジャイロ素子を、その回転軸が中心軸に対して第一の角度より小さい第2の角度を定めるように、第2の位置への移動を可能にする工程と、ジャイロ素子を第2の向きに移す工程と、ジャイロ素子を第1の位置に戻す工程と、ジャイロ素子を第1の向きに移す工程とから成る。
【0010】
好都合には、機械装置の操作方法は一対のジャイロ素子を提供する工程を含む。好ましくは、中心軸の回りを回転するように制約されたジャイロ素子を提供する工程は、中心軸の回りを回転するように制約されているアームにジャイロ素子を取り付ける工程を含む。
有利には、ジャイロ素子を第1の位置に配置するステップは、アームをシャフトの中心軸に対して実質的に直角に配置する工程を含む。
好都合には、機械装置の操作方法はさらに、中心シャフトを提供する工程を含み、中心軸は実質的に中心シャフトの長手方向軸を含む。
本発明のさらに別の側面は、上記工程を繰り返すことから成る機械装置の操作方法を提供する。
【発明の効果】
【0011】
本発明は、ジャイロ効果を利用した有用な装置を提供するものであり、該装置は正味の直線推力を発生させることができる。
【発明を実施するための最良の形態】
【0012】
本発明の理解をさらに容易にするために、以下添付図面を参照しながら実施例により本発明を具体的に説明する。
まず、図1を参照すると、本発明を具体的に示す機械装置1は中心シャフト2を備え、該中心シャフトはその中心軸3の回りを回転可能になっている。
第1及び第2のアーム4、5が中心軸3の回りを旋回可能に取り付けられている。該アーム4、5は、アーム4、5がシャフト2の中心軸3に対して実質的に垂直になる第1の位置と、アーム4、5がシャフト2の中心軸3に対してより小さい角度を定める第2の位置との間を移動可能である。
【0013】
スライダ6は中心シャフト2に摺動可能に取り付けられており、第1及び第2の支持体7、8は、第1及び第2のアーム4、5の長さに沿う途中の位置でスライダ6に接続する。
好ましくは、中央シャフト2、第1及び第2のアーム4、5、並びに第1及び第2支持体7、8は頑丈な硬い材料で作られる。
第1及び第2のアーム4、5の遠端には、それぞれ第1及び第2のジャイロ素子9、10が取り付けられている。ジャイロ素子9、10のそれぞれは回転軸の回りを回転可能になっている。
【0014】
第1及び第2のジャイロ素子9、10は第1及び第2のアーム4、5に取り付けられており、ジャイロ素子のそれぞれは、その回転軸がシャフト2の中心軸3又はその近くを通過する第1の向きと、その回転軸がシャフト2の中心軸3からのジャイロ素子9、10の変位の方向に対して、実質的に垂直である第2の向きとの間を移動可能になっている。
【0015】
第1及び第2のジャイロ素子9、10のそれぞれはモーター11、12を備えており、これによりそれぞれの回転軸の回りに回転可能になっている。
機械装置1を操作するに当たって、上述したように、まずアーム4、5を第1の位置に設置する。ジャイロ素子9、10を第1の向きに設定すると、機械装置1は第1の配置になる。
ジャイロ素子9、10の回転をモーター11、12を起動することにより開始し、中心シャフト2をその中心軸3の回りに回転する。シャフト2は一方向に連続回転することが可能であるが、交互に振動回転(オシレート回転)させることも可能であることが理解できるであろう。
【0016】
中心シャフト2の回転(よってアーム4、5も同様に回転する)によって各ジャイロ素子9、10の各々が受ける求心力(向心力)は、2個のジャイロ素子間の軸角(回転軸間の角度)が変更するように作用することが理解されるであろう。
従って、上述したように、ジャイロ素子9、10の各々に対して、軸角を変えるように加えられる力に対して、90度の方向に力(合力)が作用し、そしてこの力が、実質的にジャイロ素子9、10の面内(同一面内)に存在する。すなわち、この力(合力は)シャフト2の中心軸3と実質的に平行であることが理解されるであろう。したがって、ジャイロ素子9、10はこの方向に移動する。
【0017】
上述した回転ホイールの例を参照すると、本発明の構成は同様の状況を提供する。つまり、回転体に作用する力は、その力に対して直角にトルクを発生させるのではなく、回転体に作用するトルクは、そのトルクに対して直角の力を発生させる。
この動作により、ジャイロ素子9、10はアーム4、5を第2の位置に移動させ、同時にスライダ6をジャイロ素子9、10の移動方向に中心シャフト2に沿って移動させる。これにより、機械装置1は第2の配置になる。また、機械装置1には反対方向の力が作用しないので、機械装置1がジャイロ素子9、10の移動方向に推進力を受けることが分かる。
【0018】
一旦アーム4、5が第2の位置に移動すると、上述したように、ジャイロ素子9、10は第2の向きに移動する。これにより、機械装置1は第3の配置になる。ジャイロ素子9、10がそのような向きに置かれると、中心シャフト2の回転により発生する求心加速度に起因して、ジャイロ素子9、10に作用する力はジャイロ素子9、10の軸角を変更するように作用しないので、ジャイロ素子9、10にはジャイロ効果に起因する力が殆ど又は全く作用しないことが理解されるであろう。
【0019】
ジャイロ素子9、10が第2の配置を取るとともに、アーム4、5が第1の位置に戻り、機械装置1は第4の配置になる。この動きの間に、機械装置1に作用する正味の力は存在せず、従って、ジャイロ素子9、10が第1の向きにある間に、機械装置に与えられる推進力は反対方向の力を受けないことが分かるであろう。
【0020】
アーム4、5が第1の位置に戻る動きは、中心シャフトの回転に起因して起こる。すなわち、この回転によりアームは効果的に外側に投げ出される。
また、これはアーム4、5を第1の位置に戻すための他の手段(例えばモーター)を設けることによっても可能である。そして、ジャイロ素子9、10は第1の向きに戻り、機械装置1がサイクルスタート時の第1の構成を取ることが理解されるであろう。
機械装置1に、最初に加えられたのと同じ方向に、再度推進力が加わることにより、このサイクルが繰り返される(以下同様)。このようにして機械装置1は、中心シャフト2と平行又は実質的に平行な方向に正味の直線運動を行うことができる。
【0021】
本発明の実用的な例として、可動部の運動量を増し、各動作サイクル間の機械装置1の動作量を増すために、機械装置1の一部に重りを付加することが必要であるかも知れない。
付加的な重りはスライダ6の上、又はその周りに設置することが好ましい。スライダ6それ自身を、十分な大きさの高密度の材料で形成してもよく、又は製造後に重りを加えてもよい。
【0022】
上記動作サイクルの間に、スライダ6は、第1の配置から第2の配置への移行する間に、シャフト2に沿って一定の距離を第1の方向に移動する。サイクルの復帰に際しては(すなわち、第3から第4の形態への動作期間中)、スライダは第1の方向とは反対の方向に移動する。一方、中心シャフト2は、戻り期(相)にある間、スライダ6の動きへの反作用として第1の方向に移動する。これら動作の正味の効果が、機械装置1全体が第1の方向への直線運動することが理解される。
【0023】
図5は、本発明の機械装置1をさらに具体的に示すものであり、機械装置1は中心シャフト2が取り付けられる基部13を含み、該中心シャフト2は、駆動シャフト15にまたがる駆動ベルト14によって回転し、主モーター16によって駆動シャフトを駆動する。ジャイロ素子9、10を第1及び第2の向きの間を動かすための第1及び第2のアクチュエータ17、18が備えられ、アーム4、5の第1及び第2のそれぞれ相当する位置に、スライダ6を固定するためのソレノイドラッチ19、20が備えられる。
【0024】
図5には、機械装置1の第1及び第3の配置が示されており、第3の配置は点線で示されている。
当業者であれば、本発明は他の方法でも効果を発揮することが理解される。本発明は図5に示す配置に限定されない。
一対以上のジャイロ素子を、関連するアームやシャフトとともに任意に備えることができる。当業者であれば、そのような複数対の具体的な運用方法は用意に理解される。
【0025】
上記の説明において、ジャイロ素子9、10のそれぞれは、その回転軸がシャフト2の中心軸3又はその近くを通過する時に、第1の向きにあると記述している。この第1の向きは、回転軸のベクトルを中心軸3に平行な方向及び垂直な方向の成分に分解するとき、垂直成分が該ベクトルの主要部を占めるような状況に対応すると理解される。
同様に、ジャイロ素子9、10のそれぞれはその回転軸がシャフト2の中心軸3からのジャイロ素子9、10の変位に対して実質的に垂直である時に、第2の向きにあると記述されている。
そして、この第2の向きは、回転軸ベクトルを、中心軸3からのジャイロ素子9、10の変位に対し平行及び垂直な成分に分解するとき、垂直成分が該ベクトルの主要部を占める状況に対応すると理解される。
【0026】
本発明は、ジャイロ効果を利用した有用な装置を提供するものであり、該装置は正味の直線推力を発生させるために利用できる。
本明細書において「備える」とは「含む又は構成される」ことを意味し、「備えている」とは「含んでいる又は構成されている」ことを意味する。
説明書中に開示した本発明の態様、請求の範囲、又は各様態の、上記と同様に特定の形態として、若しくは開示した機能を発揮させるための手段として表現した付属図面、又は方法若しくは開示した結果を得るためのプロセスは、適切に、単独若しくは記述した様態のすべての組み合わせで、本発明の広範な形態を実現するために用いられる。
【産業上の利用可能性】
【0027】
ジャイロ効果を利用した有用な装置を提供するものであり、該装置は正味の直線推力を発生させるために利用できる。
【図面の簡単な説明】
【0028】
【図1】本発明の実施例に基づく装置の第1配置図である。
【図2】図1に示した装置の第2配置図である。
【図3】図1に示した装置の第3配置図である。
【図4】図1に示した装置の第4配置図である。
【図5】図1に示した装置の追加の部品を示す。
Claims (22)
- 中心軸の回りを回転するように制約され、かつ、そこから離れて位置するジャイロ素子を備え、ジャイロ素子は回転軸を有し、その回転軸が中心軸又はその近くを通過する第1の向きと、その回転軸が中心軸からのジャイロ素子の変位に対して実質的に垂直である第2の向きとの間を移動可能であり、
ジャイロ素子が第1の向きにあり、該ジャイロ素子が中心軸の回りを回転すると、ジャイロ素子に加わる力が該ジャイロ素子を中心軸に対して実質的に平行な方向に移動させることを特徴とする機械装置。 - 一対のジャイロ素子を備えることを特徴とする請求項1記載の機械装置。
- 中心シャフトを備え、その中心軸は実質的に中心シャフトの長手方向軸からなることを特徴とする請求項1又は2記載の機械装置。
- ジャイロ素子は、アームにより中心軸の回りを回転するように制約されていることを特徴とする請求項1乃至請求項3のいずれか1項に記載の機械装置。
- アームは、アームが中心軸に対する第1の角度を定める第1の位置と、アームが中心軸に対する第2の角度を定める第2の位置との間を移動可能であり、第1の角度は第2の角度より大きいことを特徴とする請求項4記載の機械装置。
- 第1の位置において、アームが中心軸に対して実質的に垂直であることを特徴とする請求項5記載の機械装置。
- アームを第2の位置から第1の位置に移動するための操作が可能なアーム復元装置をさらに備えることを特徴とする請求項5又は6記載の機械装置。
- アームが中心軸の回りを旋回可能に取り付けられていることを特徴とする請求項1乃至請求項7のいずれか1項に記載の機械装置。
- 中心軸に沿って摺動可能に取り付けられているスライダをさらに備え、該スライダはコネクタによりアームの全長に沿った位置に接続されていることを特徴とする請求項1乃至請求項8のいずれか1項に記載の機械装置。
- 各動作サイクル間の装置の運動量を増加させるために、装置の一つ以上の可動部の上又はその周囲に、重りを加えることを特徴とする請求項1乃至請求項9のいずれか1項に記載の機械装置。
- ジャイロ素子を第1の向きと第2の向きとの間を移動可能に操作できるジャイロ位置決め装置を、さらに備えることを特徴とする請求項1乃至請求項10のいずれか1項に記載の機械装置。
- 請求項1乃至請求項11のいずれか1項に記載の機械装置を備える車両。
- 機械装置の操作方法であって、
中心軸の回りを回転するように制約され、かつ該中心軸から離間させて配置したジャイロ素子を備え、ジャイロ素子は回転軸を有し、その回転軸が中心軸又はその近くを通過する第1の向きと、その回転軸は中心軸からジャイロ素子の変位に対して実質的に垂直である第2の向きとの間を移動可能であり、
ジャイロ素子が第1の向きにあり、且つ該ジャイロ素子が中心軸の回りを回転すると、ジャイロ素子に加わる力が該ジャイロ素子を中心軸に対して実質的に平行な方向に移動させることを特徴とする前記方法。 - ジャイロ素子を第1の向きに配置し、
回転軸が中心軸に対する第1の角度を定める第1の位置にジャイロ素子を配置し、
ジャイロ素子を中心軸の回りを回転させ、
回転軸が中心軸に対する第2の角度を定めるように、ジャイロ素子を第2の位置への移動を可能にし、第2の角度が第1の角度より小さく、
ジャイロ素子を第2の向きに移動させ、
ジャイロ素子を第1の位置に戻す工程と、
ジャイロ素子を第1の向きに移動させる工程と
からなることを特徴とする請求項13記載の方法。 - 一対のジャイロ素子を設けることを特徴とする請求項13又は14記載の方法。
- 中心軸の回りを回転するように制約されたジャイロ素子を配置する工程は、中心軸の回りを回転するように制約されているアームにジャイロ素子を取り付けることからなることを特徴とする請求項13乃至請求項15のいずれか1項に記載の方法。
- ジャイロ素子を第1の位置に配置する工程は、アームを中心シャフトの中心軸に対して実質的に直角に配置する工程からなることを特徴とする請求項16記載の方法。
- 中心シャフトを配置し、その中心軸が実質的に中心シャフトの長手方向の軸からなることを特徴とする請求項13乃至請求項17のいずれか1項記載の方法。
- 各動作サイクル間の運動量を増加させるために、装置の一つ以上の可動部の上又はその周囲に、重りを加える工程からなることを特徴とする請求項13乃至請求項18のいずれか1項記載の方法。
- 請求項13乃至請求項19のいずれか1項記載の工程を繰り返すことを特徴とする機械装置の操作方法。
- 添付図面に基づいて上記に実質的に記載された機械装置。
- 添付図面に基づいて上記に実質的に記載された方法。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| GBGB0120129.2A GB0120129D0 (en) | 2001-08-17 | 2001-08-17 | Production of an over all unidirectional force by a mechanism acting upon a mechanism |
| PCT/GB2002/003822 WO2003016715A1 (en) | 2001-08-17 | 2002-08-16 | A mechanical device |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2005500454A true JP2005500454A (ja) | 2005-01-06 |
| JP2005500454A5 JP2005500454A5 (ja) | 2006-01-05 |
Family
ID=9920604
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2003520981A Pending JP2005500454A (ja) | 2001-08-17 | 2002-08-16 | 機械装置 |
Country Status (10)
| Country | Link |
|---|---|
| US (1) | US20040250636A1 (ja) |
| EP (1) | EP1423609B1 (ja) |
| JP (1) | JP2005500454A (ja) |
| CN (1) | CN1543540A (ja) |
| AT (1) | ATE354024T1 (ja) |
| DE (1) | DE60218184D1 (ja) |
| EA (1) | EA006126B1 (ja) |
| GB (1) | GB0120129D0 (ja) |
| WO (1) | WO2003016715A1 (ja) |
| ZA (1) | ZA200402287B (ja) |
Families Citing this family (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| GB2527064A (en) * | 2014-06-10 | 2015-12-16 | Nicholas Julian Jan Francis Macphail | A reaction producing device that makes use of gyroscopic rotation to reset a reactive mass |
| CN106930909A (zh) * | 2015-12-28 | 2017-07-07 | 熵零技术逻辑工程院集团股份有限公司 | 一种动力产生方法 |
| CN106968900A (zh) * | 2016-01-13 | 2017-07-21 | 熵零技术逻辑工程院集团股份有限公司 | 一种动力产生方法 |
| US11047369B1 (en) * | 2017-04-04 | 2021-06-29 | Mark David Abers | Multiple torques inertial thruster engine and methodology |
| PL245304B1 (pl) * | 2019-12-17 | 2024-06-24 | Ordutowski Radoslaw | Zespół napędowy pojazdów i sposób jego działania |
Family Cites Families (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US3203644A (en) * | 1961-01-05 | 1965-08-31 | Jr Hosford Dudley Kellogg | Gyroscopic inertial space drive |
| FR1549505A (ja) * | 1967-10-31 | 1968-12-13 | ||
| US3653269A (en) * | 1970-05-15 | 1972-04-04 | Richard E Foster | Converting rotary motion into unidirectional motion |
| US3897692A (en) * | 1972-12-13 | 1975-08-05 | Arthur N Lehberger | Centrifugal propulsion drive and steering mechanism |
| DE2341245A1 (de) * | 1973-08-16 | 1975-05-22 | Alex Charles Jones | Vortriebsvorrichtung |
| GB8507684D0 (en) * | 1985-03-25 | 1985-05-01 | Laithwaite E R | Propulsion device |
| GB8629405D0 (en) * | 1986-12-09 | 1987-01-21 | Kidd A D | Gyroscopic thrust apparatus |
| CA1335239C (en) * | 1989-08-09 | 1995-04-18 | Mortimer S. Delroy | Gyrostat propulsion system |
| US5557988A (en) * | 1994-11-29 | 1996-09-24 | Claxton; John C. | Centripetally impelled vehicle |
| WO2001053721A1 (en) * | 2000-01-24 | 2001-07-26 | Davis Ulysses Jr | Vectored inertia drive/wobble drive |
| US20020117014A1 (en) * | 2001-02-28 | 2002-08-29 | Guennadi Chipov | Four-dimensional gyroscope with self-action |
-
2001
- 2001-08-17 GB GBGB0120129.2A patent/GB0120129D0/en not_active Ceased
-
2002
- 2002-08-16 CN CNA028160886A patent/CN1543540A/zh active Pending
- 2002-08-16 US US10/487,041 patent/US20040250636A1/en not_active Abandoned
- 2002-08-16 DE DE60218184T patent/DE60218184D1/de not_active Expired - Lifetime
- 2002-08-16 WO PCT/GB2002/003822 patent/WO2003016715A1/en active IP Right Grant
- 2002-08-16 JP JP2003520981A patent/JP2005500454A/ja active Pending
- 2002-08-16 EA EA200400339A patent/EA006126B1/ru not_active IP Right Cessation
- 2002-08-16 EP EP02755206A patent/EP1423609B1/en not_active Expired - Lifetime
- 2002-08-16 AT AT02755206T patent/ATE354024T1/de not_active IP Right Cessation
-
2004
- 2004-03-23 ZA ZA200402287A patent/ZA200402287B/en unknown
Also Published As
| Publication number | Publication date |
|---|---|
| GB0120129D0 (en) | 2001-10-10 |
| DE60218184D1 (de) | 2007-03-29 |
| EP1423609B1 (en) | 2007-02-14 |
| EA006126B1 (ru) | 2005-10-27 |
| ATE354024T1 (de) | 2007-03-15 |
| ZA200402287B (en) | 2004-12-02 |
| WO2003016715A1 (en) | 2003-02-27 |
| EA200400339A1 (ru) | 2005-02-24 |
| US20040250636A1 (en) | 2004-12-16 |
| EP1423609A1 (en) | 2004-06-02 |
| CN1543540A (zh) | 2004-11-03 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US5024112A (en) | Gyroscopic apparatus | |
| Vartholomeos et al. | Analysis, design and control of a planar micro-robot driven by two centripetal-force actuators | |
| JP2015142454A (ja) | アクチュエータ及び多関節ロボットアーム | |
| EP0486537A1 (en) | Gyrostat propulsion system | |
| US20210324837A1 (en) | Inertial Propulsion and Attitude-Control System and Methodology | |
| JP2005500454A (ja) | 機械装置 | |
| WO2001055592A1 (en) | Centrifugal propulsion system | |
| Sheng et al. | Kinetic model for a spherical rolling robot with soft shell in a beeline motion | |
| CN110539293B (zh) | 一种四自由度并联机构 | |
| GB2527064A (en) | A reaction producing device that makes use of gyroscopic rotation to reset a reactive mass | |
| JP6043561B2 (ja) | パラレルリンクロボット | |
| CN106272468A (zh) | 两自由度可折叠移动机器人 | |
| JP2005500454A5 (ja) | ||
| JPH0861214A (ja) | 永久エンジン | |
| Moses et al. | Origami rotors: Imparting continuous rotation to a moving platform using compliant flexure hinges | |
| US11047369B1 (en) | Multiple torques inertial thruster engine and methodology | |
| JPS61228158A (ja) | 3軸駆動ユニツト | |
| WO2018097224A1 (ja) | 移動体 | |
| WO2008070938A1 (en) | Forces generative method | |
| JP2022160738A (ja) | 旋回装置 | |
| Briskin et al. | Motion planning of a walking robot with rotary movers | |
| US20230031448A1 (en) | Vehicle propulsion unit and the manner of its operation | |
| RU2123133C1 (ru) | Инерционный двигатель | |
| RU2369515C2 (ru) | Транспортное устройство (варианты) и способ его передвижения (варианты) | |
| JP2021050622A (ja) | 推力生成装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20050812 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20050812 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20080930 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20090317 |