JP2005296658A - 生体組織構造を検出するための方法と装置 - Google Patents
生体組織構造を検出するための方法と装置 Download PDFInfo
- Publication number
- JP2005296658A JP2005296658A JP2005111671A JP2005111671A JP2005296658A JP 2005296658 A JP2005296658 A JP 2005296658A JP 2005111671 A JP2005111671 A JP 2005111671A JP 2005111671 A JP2005111671 A JP 2005111671A JP 2005296658 A JP2005296658 A JP 2005296658A
- Authority
- JP
- Japan
- Prior art keywords
- contour
- data set
- anatomy
- boundary
- points
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images





Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/08—Clinical applications
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/10—Segmentation; Edge detection
- G06T7/12—Edge-based segmentation
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B6/00—Apparatus or devices for radiation diagnosis; Apparatus or devices for radiation diagnosis combined with radiation therapy equipment
- A61B6/50—Apparatus or devices for radiation diagnosis; Apparatus or devices for radiation diagnosis combined with radiation therapy equipment specially adapted for specific body parts; specially adapted for specific clinical applications
- A61B6/503—Apparatus or devices for radiation diagnosis; Apparatus or devices for radiation diagnosis combined with radiation therapy equipment specially adapted for specific body parts; specially adapted for specific clinical applications for diagnosis of the heart
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/08—Clinical applications
- A61B8/0883—Clinical applications for diagnosis of the heart
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/10—Image acquisition modality
- G06T2207/10132—Ultrasound image
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/30—Subject of image; Context of image processing
- G06T2207/30004—Biomedical image processing
- G06T2207/30048—Heart; Cardiac
Landscapes
- Engineering & Computer Science (AREA)
- Health & Medical Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- Physics & Mathematics (AREA)
- Surgery (AREA)
- Animal Behavior & Ethology (AREA)
- Radiology & Medical Imaging (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Biomedical Technology (AREA)
- Heart & Thoracic Surgery (AREA)
- Medical Informatics (AREA)
- Molecular Biology (AREA)
- Biophysics (AREA)
- Pathology (AREA)
- General Health & Medical Sciences (AREA)
- Public Health (AREA)
- Veterinary Medicine (AREA)
- Computer Vision & Pattern Recognition (AREA)
- General Physics & Mathematics (AREA)
- Theoretical Computer Science (AREA)
- Ultra Sonic Daignosis Equipment (AREA)
- Apparatus For Radiation Diagnosis (AREA)
- Magnetic Resonance Imaging Apparatus (AREA)
- Nuclear Medicine (AREA)
Abstract
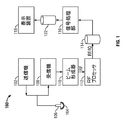
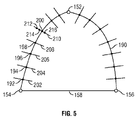
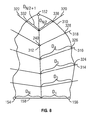
【解決手段】生体組織構造に対応する診断画像を表すデータセットを得る工程と、そのデータセットの中で少なくとも1つの生体組織の象徴部を識別する工程と、データセットを輪郭テンプレートに重ねて、輪郭テンプレートを囲むデータセットの検索領域を走査して172〜180生体組織構造の所定の特徴を備えた境界を識別する工程を含む、医療診断画像データセットに基づいて生体組織構造を検出する。これにより、生体構造の所定の特徴に伴う境界点を識別する。
【選択図】図4
Description
150 画像フレーム
190 輪郭テンプレート
Claims (16)
- 生体構造に対応する診断画像を表すデータセットを取得することと、前記データセット内における少なくとも一つの生体構造の象徴部を識別することと、前記データセットを輪郭テンプレートに重ね合わせることと、前記輪郭テンプレートを囲む前記データセットの検索領域を分析して生体構造の所定の特徴に伴う境界点を識別することとを含む医療診断画像データセットに基づいて生体構造を検出するための方法。
- さらに前記輪郭テンプレートと前記境界点に基づく一連の画像に対する輪郭を定義することと、前記輪郭を隣接する画像と比較することとを含む請求項1に記載の方法。
- 生体構造の前記所定の特徴は、心臓の室の内縁であることを特徴とする請求項1に記載の方法。
- 生体構造の前記所定の特徴は心臓の室の壁であることを特徴とする請求項1に記載の方法。
- さらに前記分析を行う前記輪郭テンプレートを横切る一連のパスを定義することを含む請求項1に記載の方法。
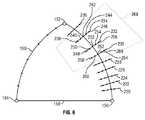
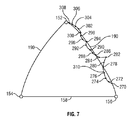
- さらに、前記輪郭テンプレートに直交する一連のパスを定義することと、前記パスに沿って候補の境界点を探すこととを含む請求項1に記載の方法。
- さらに、明度、診断画像における隣接する境界点の間の円滑な空間的境界、および他の診断画像における対応する境界点の間の円滑な一時的境界のうちのいずれか1つに基づいて前記検索領域内の候補境界点をスコアリングすることを含む請求項1に記載の方法。
- さらに境界の円滑性に基づいて前記検索領域における候補の境界点を通るパスを選択することを含む請求項1に記載の方法。
- 前記輪郭テンプレートは生体構造の外形を推測したものである請求項1に記載の方法。
- 前記取得する方法が、対象となる生体の超音波、CT、PET、SPECT、ガンマカメラ、X線、およびMRによる走査のうち少なくとも一つを行うことを含む請求項1に記載の方法。
- 前記取得する方法が、前に取得したデータセットをロードすることを含む請求項1に記載の方法。
- 前記生体構造が前記心内膜を構成し、前記生体構造の象徴部が心室の先端、心房および心室を分離する面、および心臓弁のうちの少なくとも一方を構成する請求項1の方法。
- 超音波信号を対象となる領域に伝達する送信機と、伝達した超音波信号からエコー信号を受信するための受信機と、前記エコー信号を備えた、少なくとも1心拍周期を含む一連の画像フレームを保存するためのメモリと、前記一連の画像フレームを処理して先端と、AV面の第1と第2の端部の少なくとも一方を識別するするとともに、前記先端を前記第1と第2の端部を結んだ輪郭テンプレートを前記一連の画像フレーム上に重ね、さらに前記輪郭テンプレートに沿った点を識別し比較して心内膜の所定の特徴に基づいて境界点を識別する信号処理部と、前記信号処理部の出力に基づいて情報を出力するための出力部とを備えた心内膜を識別する装置。
- さらに前記信号処理部は前記輪郭テンプレートを横切るパスを定義し、前記パスは前記点と交差し、前記信号処理部は前記パスそれぞれに沿って少なくとも二つの候補点を定義し、前記少なくとも二つの候補点を前記所定の特徴において互いに比較することを特徴とする請求項13に記載の装置。
- さらに前記先端と、前記AV面の第1と第2の端部の少なくとも一方を調整するためのユーザ入力部を備えた請求項13に記載の装置。
- さらに、前記信号処理部は、前記一連の画像フレームのうち隣接する画像フレームにおける前記境界点を比較し、さらに前記信号処理部は、少なくとも1つの隣接する画像フレームにおける少なくとも一つの境界点に基づいて第1の隣接する画像フレーム内で少なくとも1つの境界点を移動させることを含む請求項13に記載の装置。
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US10/822,935 US7678052B2 (en) | 2004-04-13 | 2004-04-13 | Method and apparatus for detecting anatomic structures |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2005296658A true JP2005296658A (ja) | 2005-10-27 |
| JP2005296658A5 JP2005296658A5 (ja) | 2008-05-22 |
Family
ID=35061477
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2005111671A Pending JP2005296658A (ja) | 2004-04-13 | 2005-04-08 | 生体組織構造を検出するための方法と装置 |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US7678052B2 (ja) |
| JP (1) | JP2005296658A (ja) |
| DE (1) | DE102005016944A1 (ja) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2008142519A (ja) * | 2006-11-14 | 2008-06-26 | Aloka Co Ltd | 超音波診断装置及びボリュームデータ処理方法 |
| JP2010017530A (ja) * | 2008-06-13 | 2010-01-28 | Canon Inc | 超音波装置及びその制御方法 |
| JP2011504629A (ja) * | 2007-11-22 | 2011-02-10 | トウシバメディカルビジュアライゼーションシステムズヨーロッパ・リミテッド | ボリュームレンダリング装置及び方法 |
Families Citing this family (42)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20060058675A1 (en) * | 2004-08-31 | 2006-03-16 | General Electric Company | Three dimensional atrium-ventricle plane detection |
| US20060058609A1 (en) * | 2004-08-31 | 2006-03-16 | General Electric Company | Extracting ultrasound summary information useful for inexperienced users of ultrasound |
| US7555151B2 (en) * | 2004-09-02 | 2009-06-30 | Siemens Medical Solutions Usa, Inc. | System and method for tracking anatomical structures in three dimensional images |
| DE102004043058A1 (de) * | 2004-09-06 | 2006-04-06 | Siemens Ag | Verfahren zur Bestimmung ausgezeichneter coronaler und sagittaler Ebenen für die nachfolgende Aufnahme neuer Magnetresonanz-Schichtbilder oder die Darstellung von Magnetresonanz-Schichtbildern aus einem bereits vorhandenen Bilddatensatz eines Schultergelenks |
| US7724929B2 (en) * | 2005-10-17 | 2010-05-25 | Siemens Medical Solutions Usa, Inc. | System and method for myocardium segmentation in realtime cardiac MR data |
| US20080009733A1 (en) * | 2006-06-27 | 2008-01-10 | Ep Medsystems, Inc. | Method for Evaluating Regional Ventricular Function and Incoordinate Ventricular Contraction |
| US7728868B2 (en) | 2006-08-02 | 2010-06-01 | Inneroptic Technology, Inc. | System and method of providing real-time dynamic imagery of a medical procedure site using multiple modalities |
| US20080086053A1 (en) * | 2006-10-06 | 2008-04-10 | Siemens Corporate Research, Inc. | Component-Based Approach For Fast Left Ventricle Detection |
| EP2026280B1 (en) * | 2007-07-23 | 2013-10-23 | Esaote S.p.A. | Method and corresponding apparatus for quantitative measurements on sequences of images, particularly ultrasonic images |
| US20090105578A1 (en) * | 2007-10-19 | 2009-04-23 | Siemens Medical Solutions Usa, Inc. | Interactive Medical Imaging Processing and User Interface System |
| US20110105931A1 (en) * | 2007-11-20 | 2011-05-05 | Siemens Medical Solutions Usa, Inc. | System for Determining Patient Heart related Parameters for use in Heart Imaging |
| WO2009094646A2 (en) | 2008-01-24 | 2009-07-30 | The University Of North Carolina At Chapel Hill | Methods, systems, and computer readable media for image guided ablation |
| WO2009132188A1 (en) * | 2008-04-24 | 2009-10-29 | Boston Scientific Scimed, Inc. | Methods, systems, and devices for tissue characterization by spectral similarity of intravascular ultrasound signals |
| US9549713B2 (en) | 2008-04-24 | 2017-01-24 | Boston Scientific Scimed, Inc. | Methods, systems, and devices for tissue characterization and quantification using intravascular ultrasound signals |
| US8444564B2 (en) | 2009-02-02 | 2013-05-21 | Jointvue, Llc | Noninvasive diagnostic system |
| US11464578B2 (en) | 2009-02-17 | 2022-10-11 | Inneroptic Technology, Inc. | Systems, methods, apparatuses, and computer-readable media for image management in image-guided medical procedures |
| US8554307B2 (en) | 2010-04-12 | 2013-10-08 | Inneroptic Technology, Inc. | Image annotation in image-guided medical procedures |
| US8690776B2 (en) | 2009-02-17 | 2014-04-08 | Inneroptic Technology, Inc. | Systems, methods, apparatuses, and computer-readable media for image guided surgery |
| US8641621B2 (en) | 2009-02-17 | 2014-02-04 | Inneroptic Technology, Inc. | Systems, methods, apparatuses, and computer-readable media for image management in image-guided medical procedures |
| DE102009014763B4 (de) * | 2009-03-25 | 2018-09-20 | Siemens Healthcare Gmbh | Verfahren und Datenverarbeitungssystem zur Bestimmung des Kalziumanteils in Herzkranzgefäßen |
| US9002078B2 (en) * | 2009-10-22 | 2015-04-07 | Siemens Aktiengesellschaft | Method and system for shape-constrained aortic valve landmark detection |
| GB2475722B (en) * | 2009-11-30 | 2011-11-02 | Mirada Medical | Measurement system for medical images |
| US10512451B2 (en) | 2010-08-02 | 2019-12-24 | Jointvue, Llc | Method and apparatus for three dimensional reconstruction of a joint using ultrasound |
| US20130225987A1 (en) * | 2010-09-20 | 2013-08-29 | Stephen Yarnall | Dedicated breast imaging with improved gamma-ray collection |
| WO2013025613A1 (en) | 2011-08-12 | 2013-02-21 | Jointvue, Llc | 3-d ultrasound imaging device and methods |
| CA3194212A1 (en) | 2011-10-14 | 2013-04-18 | Jointvue, Llc | Real-time 3-d ultrasound reconstruction of knee and its implications for patient specific implants and 3-d joint injections |
| US8670816B2 (en) | 2012-01-30 | 2014-03-11 | Inneroptic Technology, Inc. | Multiple medical device guidance |
| US9747306B2 (en) | 2012-05-25 | 2017-08-29 | Atheer, Inc. | Method and apparatus for identifying input features for later recognition |
| US10314559B2 (en) | 2013-03-14 | 2019-06-11 | Inneroptic Technology, Inc. | Medical device guidance |
| KR20150108701A (ko) | 2014-03-18 | 2015-09-30 | 삼성전자주식회사 | 의료 영상 내 해부학적 요소 시각화 시스템 및 방법 |
| KR101616029B1 (ko) | 2014-07-25 | 2016-04-27 | 삼성전자주식회사 | 자기 공명 영상 처리 방법 및 방법을 실행하기 위한 장치 |
| CN104188691A (zh) * | 2014-09-23 | 2014-12-10 | 飞依诺科技(苏州)有限公司 | 超声图像的辅助导航定位方法及系统 |
| US9901406B2 (en) | 2014-10-02 | 2018-02-27 | Inneroptic Technology, Inc. | Affected region display associated with a medical device |
| US10188467B2 (en) | 2014-12-12 | 2019-01-29 | Inneroptic Technology, Inc. | Surgical guidance intersection display |
| CN117179817A (zh) | 2015-05-05 | 2023-12-08 | 波士顿科学国际有限公司 | 有设于超声成像系统换能器上的可膨胀材料的系统和方法 |
| US9949700B2 (en) | 2015-07-22 | 2018-04-24 | Inneroptic Technology, Inc. | Medical device approaches |
| US9675319B1 (en) | 2016-02-17 | 2017-06-13 | Inneroptic Technology, Inc. | Loupe display |
| US10278778B2 (en) | 2016-10-27 | 2019-05-07 | Inneroptic Technology, Inc. | Medical device navigation using a virtual 3D space |
| US11259879B2 (en) | 2017-08-01 | 2022-03-01 | Inneroptic Technology, Inc. | Selective transparency to assist medical device navigation |
| US11484365B2 (en) | 2018-01-23 | 2022-11-01 | Inneroptic Technology, Inc. | Medical image guidance |
| US11931202B2 (en) * | 2018-09-03 | 2024-03-19 | Canon Medical Systems Corporation | Ultrasound automatic scanning system, ultrasound diagnostic apparatus, ultrasound scanning support apparatus |
| JP7294996B2 (ja) * | 2019-11-28 | 2023-06-20 | 富士フイルムヘルスケア株式会社 | 超音波診断装置及び表示方法 |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH05143734A (ja) * | 1991-11-20 | 1993-06-11 | Yamatake Honeywell Co Ltd | 部品輪郭抽出方法 |
| WO2002045586A1 (en) * | 2000-12-07 | 2002-06-13 | Koninklijke Philips Electronics N.V. | Acquisition, analysis and display of ultrasonic diagnostic cardiac images |
| JP2002291750A (ja) * | 2001-03-30 | 2002-10-08 | Yoshihiro Sasaki | 超音波画像における腫瘍境界表示装置 |
Family Cites Families (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US6106466A (en) * | 1997-04-24 | 2000-08-22 | University Of Washington | Automated delineation of heart contours from images using reconstruction-based modeling |
| US6106465A (en) * | 1997-08-22 | 2000-08-22 | Acuson Corporation | Ultrasonic method and system for boundary detection of an object of interest in an ultrasound image |
| US6491636B2 (en) * | 2000-12-07 | 2002-12-10 | Koninklijke Philips Electronics N.V. | Automated border detection in ultrasonic diagnostic images |
| US20030160786A1 (en) * | 2002-02-28 | 2003-08-28 | Johnson Richard K. | Automatic determination of borders of body structures |
| US7359554B2 (en) * | 2002-08-26 | 2008-04-15 | Cleveland Clinic Foundation | System and method for identifying a vascular border |
-
2004
- 2004-04-13 US US10/822,935 patent/US7678052B2/en active Active
-
2005
- 2005-04-08 JP JP2005111671A patent/JP2005296658A/ja active Pending
- 2005-04-12 DE DE102005016944A patent/DE102005016944A1/de not_active Ceased
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH05143734A (ja) * | 1991-11-20 | 1993-06-11 | Yamatake Honeywell Co Ltd | 部品輪郭抽出方法 |
| WO2002045586A1 (en) * | 2000-12-07 | 2002-06-13 | Koninklijke Philips Electronics N.V. | Acquisition, analysis and display of ultrasonic diagnostic cardiac images |
| JP2002291750A (ja) * | 2001-03-30 | 2002-10-08 | Yoshihiro Sasaki | 超音波画像における腫瘍境界表示装置 |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2008142519A (ja) * | 2006-11-14 | 2008-06-26 | Aloka Co Ltd | 超音波診断装置及びボリュームデータ処理方法 |
| JP2011504629A (ja) * | 2007-11-22 | 2011-02-10 | トウシバメディカルビジュアライゼーションシステムズヨーロッパ・リミテッド | ボリュームレンダリング装置及び方法 |
| JP2010017530A (ja) * | 2008-06-13 | 2010-01-28 | Canon Inc | 超音波装置及びその制御方法 |
| CN102056548B (zh) * | 2008-06-13 | 2013-02-13 | 佳能株式会社 | 超声波装置及其控制方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| DE102005016944A1 (de) | 2005-11-03 |
| US7678052B2 (en) | 2010-03-16 |
| US20050228254A1 (en) | 2005-10-13 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2005296658A (ja) | 生体組織構造を検出するための方法と装置 | |
| US8050478B2 (en) | Method and apparatus for tissue border detection using ultrasonic diagnostic images | |
| CN110477952B (zh) | 超声波诊断装置、医用图像诊断装置及存储介质 | |
| US8167802B2 (en) | Biological tissue motion trace method and image diagnosis device using the trace method | |
| US6491636B2 (en) | Automated border detection in ultrasonic diagnostic images | |
| JP4152746B2 (ja) | 超音波診断心臓画像の捕捉、分析、及び表示方法 | |
| US6994673B2 (en) | Method and apparatus for quantitative myocardial assessment | |
| US11510651B2 (en) | Ultrasonic diagnosis of cardiac performance using heart model chamber segmentation with user control | |
| JP5276322B2 (ja) | 虚血性心疾患の超音波診断方法及び装置 | |
| US6537221B2 (en) | Strain rate analysis in ultrasonic diagnostic images | |
| JPH1142227A (ja) | 組織の動き追尾方法及び超音波画像処理装置 | |
| WO2017206023A1 (zh) | 一种心脏容积识别分析系统和方法 | |
| WO2007016369A2 (en) | System and method for cardiac imaging | |
| JP2015156960A (ja) | 超音波診断装置 | |
| CN116883322A (zh) | 一种三维超声模型应用于心脏参数测量与管理方法及终端 | |
| JP5015513B2 (ja) | 解剖学的構造の計測のための一体型超音波デバイス | |
| RU2708317C2 (ru) | Ультразвуковая диагностика работы сердца посредством сегментации камеры с одной степенью свободы | |
| EP4366623B1 (en) | Augmented imaging for valve repair | |
| JP4528247B2 (ja) | 超音波診断装置及び超音波画像処理方法 | |
| US12514545B2 (en) | Completeness of view of anatomy in ultrasound imaging and associated systems, devices, and methods | |
| JP6745210B2 (ja) | 超音波画像処理装置及び方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20080404 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20080404 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20101021 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20101026 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20110119 |
|
| RD02 | Notification of acceptance of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7422 Effective date: 20110119 |
|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20110119 |
|
| A602 | Written permission of extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A602 Effective date: 20110125 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20110628 |