JP2005294515A - 不定形基板サポートシステムおよび不定形基板搬送システム - Google Patents
不定形基板サポートシステムおよび不定形基板搬送システム Download PDFInfo
- Publication number
- JP2005294515A JP2005294515A JP2004107126A JP2004107126A JP2005294515A JP 2005294515 A JP2005294515 A JP 2005294515A JP 2004107126 A JP2004107126 A JP 2004107126A JP 2004107126 A JP2004107126 A JP 2004107126A JP 2005294515 A JP2005294515 A JP 2005294515A
- Authority
- JP
- Japan
- Prior art keywords
- substrate
- irregular
- amorphous
- irregular substrate
- base
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images


Landscapes
- Container, Conveyance, Adherence, Positioning, Of Wafer (AREA)
Abstract
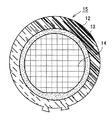
【解決手段】不定形基板サポートシステム8は、ベース基板6を備える。ベース基板6は、不定形基板1が嵌め込まれる凹部を有し、該凹部に不定形基板1を嵌め込んだ状態で該不定形基板1をサポートする。凹部に不定形基板1を嵌め込んだ状態で、不定形基板1の側壁に接触するように凹部内に、不定形基板1を周囲から取り囲み、それによって不定形基板1をベース基板6に固定する、脱着可能なサポート用樹脂10が設けられている。
【選択図】図2
Description
凹部6aに不定形基板1を嵌め込んだ状態で、不定形基板1をベース基板6に固定する、脱着可能なサポート用樹脂10を備える。サポート用樹脂10は、不定形基板1の側壁に接触するように凹部6a内に設けられ、不定形基板1を周囲から取り囲み、それによって
不定形基板1がベース基板6にしっかりとサポートされる。
6 ベース基板
10 サポート用樹脂
Claims (17)
- 不定形基板を固定するための不定形基板サポートシステムであって、
前記不定形基板が嵌め込まれる凹部を有し、該凹部に前記不定形基板を嵌め込んだ状態で該不定形基板をサポートするベース基板と、
前記凹部に前記不定形基板を嵌め込んだ状態で、前記不定形基板の側壁に接触するように前記凹部内に設けられ、前記不定形基板を周囲から取り囲み、それによって前記不定形基板を前記ベース基板に固定する、脱着可能なサポート用樹脂とを備えた不定形基板サポートシステム。 - 前記サポート用樹脂は、常温時は液体で、加熱する事により硬化する熱硬化性樹脂を含む請求項1に記載の不定形基板サポートシステム。
- 前記サポート用樹脂は、常温時は固体で、加熱する事により液化する、熱軟化性樹脂を含む請求項1に記載の不定形基板サポートシステム。
- 前記凹部内に前記不定形基板が嵌め込まれた状態において、前記サポート用樹脂の上面と前記不定形基板の上面は面一にされている請求項1に記載の不定形基板サポートシステム。
- 不定形基板およびベース基板をセット部で一体化し、搬送する不定形基板搬送システムであって、
セットする前の前記不定形基板を一時ストックする不定形基板ローダ部と、
セットする前の前記ベース基板を一時ストックするベース基板ローダ部と、
前記ベース基板を前記ベース基板ローダ部から前記セット部へ搬送するベース基板搬送用ロボットと、
前記不定形基板の外形を検出する機能を有し、かつ該不定形基板を前記不定形基板ローダ部から前記セット部に搬送する不定形基板搬送用ロボットと、
前記不定形基板搬送用ロボットによって検出された前記不定形基板の外形のデータを基に、前記不定形基板の面積および方向を算出し、かつ前記不定形基板搬送用ロボットを制御する制御部と、
前記セット部に設けられ、搬送されてきた前記不定形基板および前記ベース基板をセットするためのセット手段と、
セットされた前記不定形基板と前記ベース基板との一体化物を取り出すアンローダ部と、
を備えた不定形基板搬送システム。 - 前記ベース基板は、前記不定形基板が嵌め込まれる凹部を有し、該凹部に前記不定形基板を嵌め込んだ状態で、該不定形基板をサポートするように構成されており、
前記セット手段は、前記ベース基板の前記凹部に前記不定形基板を嵌め込んだ状態で、前記不定形基板の側壁に接触するように、かつ前記不定形基板を周囲から取り囲むようにサポート用の樹脂を前記凹部内に充填し、それによって前記不定形基板を前記ベース基板に固定する手段を含む請求項5に記載の不定形基板搬送システム。 - 前記サポート用樹脂には、常温時は液体で、加熱する事により硬化する、熱硬化性樹脂が用いられる請求項6に記載の不定形基板搬送システム。
- 前記サポート用樹脂には、常温時は固体で、加熱する事により液化する、熱軟化性樹脂が用いられる請求項6に不定形基板搬送システム。
- 前記セット手段は、前記サポート用樹脂を加熱し成形するヒータを備える請求項5に記載の不定形基板搬送システム。
- 前記不定形基板搬送用ロボットは、前記不定形基板の外形を検出するための反射型光センサ、静電容量センサ、または画像識別システムを備える請求項5に記載の不定形基板搬送システム。
- 前記不定形基板搬送用ロボットは、前記不定形基板の端部を吸着する、少なくとも1個の吸着ノズルを備え、それによって、前記不定形基板の有効デバイスエリア部分を傷つける事なく、該不定形基板を搬送する請求項5に記載の不定形基板搬送システム。
- 前記不定形基板搬送用ロボットは、前記不定形基板の重心位置を算出する手段を有する請求項5に記載の不定形基板搬送システム。
- 前記不定形基板搬送用ロボットは、前記不定形基板内のデバイスパターンを検出し、該不定形基板の方向を補正する手段を有する請求項5に記載の不定形基板搬送システム。
- 前記不定形基板搬送用ロボットは、前記不定形基板を、該不定形基板の重心を前記ベース基板の重心に合わせてセットする手段を有する請求項12に記載の不定形基板搬送システム。
- 前記不定形基板搬送用ロボットは、前不定形基板の向きを特定の方向に補正し、前記セット部に搬送する手段を有する請求項13に記載の不定形基板搬送システム。
- 前記不定形基板搬送用ロボットは、前記不定形基板と前記ベース基板のサイズを照合し、前記不定形基板がサイズオーバーの時は、不定形基板ローダー部に該不定形基板を返却する手段をさらに備える請求項5に記載の不定形基板搬送システム。
- 前記不定形基板の面積と前記ベース基板の面積を照合し、複数の不定形基板を前記ベース基板にセット可能な場合は、最適レイアウトで前記複数の不定形基板を前記ベース基板へセットする手段を有する、請求項5記載の不定形基板搬送システム。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004107126A JP2005294515A (ja) | 2004-03-31 | 2004-03-31 | 不定形基板サポートシステムおよび不定形基板搬送システム |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004107126A JP2005294515A (ja) | 2004-03-31 | 2004-03-31 | 不定形基板サポートシステムおよび不定形基板搬送システム |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2005294515A true JP2005294515A (ja) | 2005-10-20 |
Family
ID=35327113
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2004107126A Pending JP2005294515A (ja) | 2004-03-31 | 2004-03-31 | 不定形基板サポートシステムおよび不定形基板搬送システム |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2005294515A (ja) |
-
2004
- 2004-03-31 JP JP2004107126A patent/JP2005294515A/ja active Pending
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR101745045B1 (ko) | 반송 기구의 위치 결정 방법, 피처리체의 위치 어긋남량 산출 방법 및 반송 기구의 티칭 데이터의 수정 방법 | |
| US7129147B2 (en) | Delivery position aligning method for use in a transfer system and a processing system employing the method | |
| US7987888B2 (en) | Releasing method and releasing apparatus of work having adhesive tape | |
| US6848882B2 (en) | Apparatus and method for positioning a cassette pod onto a loadport by an overhead hoist transport system | |
| JP5436876B2 (ja) | 研削方法 | |
| CN102412177B (zh) | 晶圆传送系统和晶圆传送方法 | |
| US7011484B2 (en) | End effector with tapered fingertips | |
| KR20010042421A (ko) | 얼라인먼트 처리기구 및 그것을 사용한 반도체 처리장치 | |
| JP5884624B2 (ja) | 基板処理装置、調整方法及び記憶媒体 | |
| JP2007123556A (ja) | 真空処理方法または真空処理装置 | |
| CN112123063B (zh) | 被加工物的加工方法 | |
| KR100723119B1 (ko) | 기판 처리 장치 및 그 반송 위치 설정 방법 | |
| JP2006019544A (ja) | 基板移載装置および基板搬送システム | |
| JP6630884B2 (ja) | 基板のアライメント装置 | |
| JPH08148451A (ja) | 半導体ウェーハ自動剥し装置 | |
| JP2005294515A (ja) | 不定形基板サポートシステムおよび不定形基板搬送システム | |
| JP2002043398A (ja) | 基板処理装置および半導体装置の製造方法 | |
| KR20050044913A (ko) | 티칭 방법 및 처리 시스템 | |
| JP7514695B2 (ja) | アライメント装置、基板搬送システム、アライメント方法、及び基板搬送方法 | |
| JP3571310B2 (ja) | 半導体ウェーハ剥し装置および半導体ウェーハの製造方法 | |
| JP6101567B2 (ja) | ワーク搬送方法 | |
| TWI835102B (zh) | 晶圓輸送設備及輸送半導體晶圓的方法 | |
| KR20170113081A (ko) | 기판 처리 장치 및 기판 처리 방법 | |
| US12296472B2 (en) | Mobile manipulator | |
| CN110900313A (zh) | 基板磨削装置以及基板磨削方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Effective date: 20060125 Free format text: JAPANESE INTERMEDIATE CODE: A621 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20081104 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20090120 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20090316 |
|
| A131 | Notification of reasons for refusal |
Effective date: 20090602 Free format text: JAPANESE INTERMEDIATE CODE: A131 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20090731 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20090929 |