JP2005292027A - 三次元形状計測・復元処理装置および方法 - Google Patents
三次元形状計測・復元処理装置および方法 Download PDFInfo
- Publication number
- JP2005292027A JP2005292027A JP2004109920A JP2004109920A JP2005292027A JP 2005292027 A JP2005292027 A JP 2005292027A JP 2004109920 A JP2004109920 A JP 2004109920A JP 2004109920 A JP2004109920 A JP 2004109920A JP 2005292027 A JP2005292027 A JP 2005292027A
- Authority
- JP
- Japan
- Prior art keywords
- image
- measurement
- shape
- data
- plane
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images
















Landscapes
- Length Measuring Devices By Optical Means (AREA)
Abstract
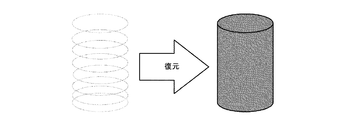
【解決手段】 本発明は、三次元位置と姿勢方向を検出できる三次元磁気センサをCCDカメラに取り付けることにより、CCDカメラを自由に動かし多方向からのシルエット画像を得ることで計測物体形状を復元する。この計測法ではCCDカメラ一台のみで計測を行うため画像間の対応をとる必要が無く、またレーザなどの光を吸収または反射する材質の物体に対しても計測が可能となる。
【選択図】 図1
Description
この特徴によれば、計測を行う前にキャリブレーションを行うことで計測時間の短縮と全ての輪郭計測において同条件での計測が可能になる。また一度キャリブレーションを行うことで、CCDカメラを動かした際もその動きは三次元磁気センサによって計測されるため、その都度、CCDカメラのキャリブレーションを行う必要がない。更に、この計測法ではCCDカメラ一台のみで計測を行うため画像間の対応をとる必要が無く、またレーザなどの光を吸収または反射する材質の物体に対しても計測が可能となる。
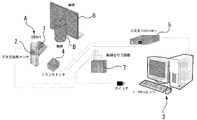
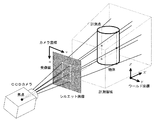
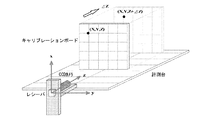
好適な実施態様としては、三次元位置と姿勢方向を検出できる三次元磁気センサ(3 SPACE FASTRACK Polhemus Inc.)をCCDカメラに取り付けることにより、CCDカメラを自由に動かし多方向からのシルエット画像を得ることで計測物体形状を復元出来る。
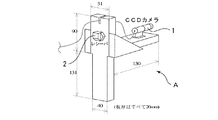
レシーバ2はCCDカメラ1を固定したカメラユニットAに取り付けてあり、カメラユニットAを動かした際もその動きは三次元センサ2によって計測される。
シルエット画像の撮影に同期して、カメラユニットAの位置と姿勢が計測される。これらの制御はPLDによる回路およびPCで行われる。
物体B後方にある黒板6は対象のシルエット画像を撮りやすくするために使用する。
レシーバ2はトランスミッタ4から発信される磁気を検出しており、周辺に金属などがあると計測結果にその影響を受ける。そのため、カメラユニットAは木材やプラスチック、アルミ製の材料で作成している。
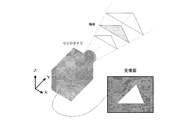
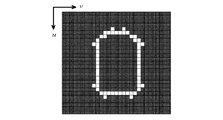
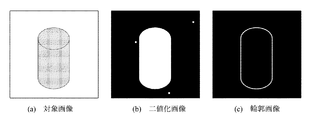
得られた画像に二値化、輪郭抽出などの画像処理を行い、シルエット画像Cを得る。
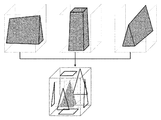
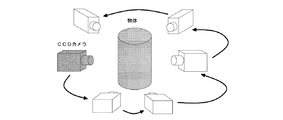
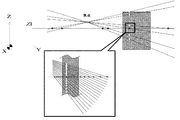
(1) カメラを移動させながら多方向からの撮影を行い、各方向からのシルエット画像を得る。
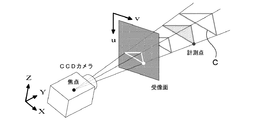
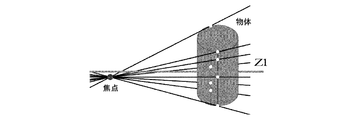
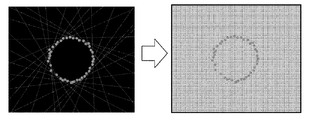
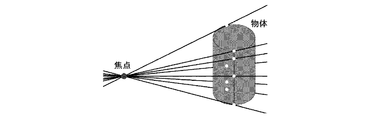
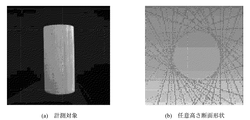
(2) 各シルエット画像を基にそれぞれの撮影方向において、計測対象を含む候補領域を抽出する。
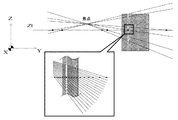
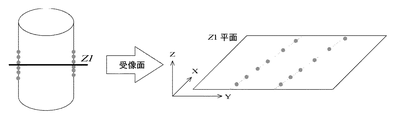
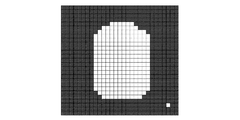
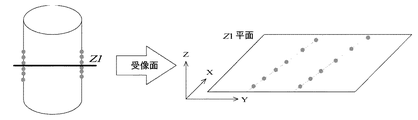
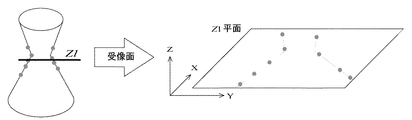
(3) 抽出された候補領域内に水平面と平行な面を設定し、その平面上で候補領域の断面形状を算出する。
(4) (3)の処理を異なる撮影方向から得られた候補領域に対し行う。
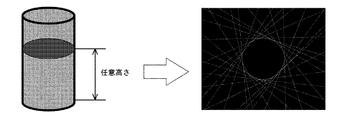
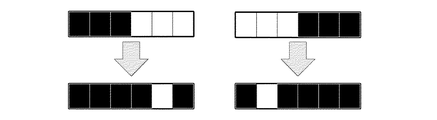
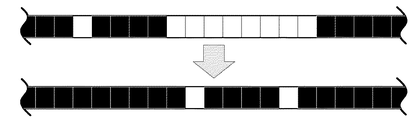
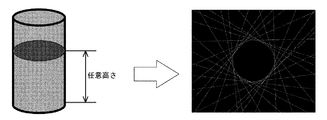
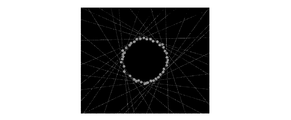
(5) 同一平面内で様々な撮影方向から得られた候補領域の断面形状を重ね合わせ
重複した部分を抽出することで、計測対象のその平面での断面形状が決定される。
(6) (3)で設定した平面を上下に移動し、それぞれの平面上で対象の断面形状の算出を繰り返すことで,対象全体の形状を復元する。
という手順で説明を行っている。
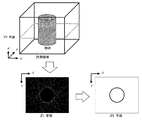
(1) 一方向から対象を撮影しシルエット画像を得る。
(2) 撮影されたシルエット画像を基に計測対象を含む候補領域を抽出する。
(3) 取り出した候補領域内に水平面と平行な面を設定し、その平面上の候補領域の断面形状を算出する。
(4) (3)で設定した平面の位置を上下方向に移動し、それぞれの平面上で候補領域の断面形状の算出を繰り返すことで,候補領域全体の形状を算出する。
(5) カメラを移動させながら多方向からの撮影を行い、それぞれの方向から算出された候補領域形状を重ね、重複した部分を抽出することで対象の形状を復元する。
という手順で行う。
(1)計測を行う前にキャリブレーションを行う。先にキャリブレーションを行うことで計測時間の短縮と全ての輪郭計測において同条件での計測が可能になる。
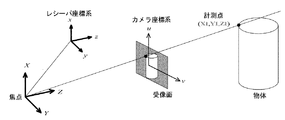
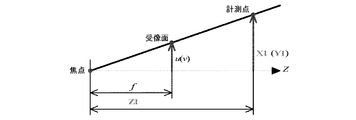
(2)対象をCCDカメラで取り込み、同時にCCDカメラの位置と姿勢をレシーバにより計測する。得られた画像に二値化、輪郭抽出などの処理を行い、カメラ座標を読み取る。
(3)キャリブレーションデータを元にカメラ座標をレシーバ座標に変換し、更にレシーバ座標を撮影時のカメラの位置と姿勢を元にワールド座標に変換する。
(4)カメラを移動させつぎのシルエットの撮影を行い、(2)〜(3)を繰り返す。
(5)全ての輪郭の計測が終了したら全輪郭を表示し、交点を算出する。
(6)全ての結果より対象の形状を復元する。
となる。

これら回転と平行移動の変化を(4.2)式に導入すると、
また、(4.5)式をh34で両辺を割り、代数s,k11〜k33で置き換えると次式で表すことができる。
(4.8)式を展開すると、
(1) 50mmおきに目盛りの刻まれたキャリブレーションボードをCCDカメラに固定されているレシーバのx−y平面と平行に設置する。
(2) キャリブレーションボードを撮影し,ディスプレイ上に表示する。
(3) ディスプレイ上のキャリブレーションボード目盛りをマウスでクリックする(カメラ座標(u,v)の読み込み)。
(4) (3)でクリックした点と対応するレシーバ座標を入力する(レシーバ座標(x,y,z)の読み込み)。
(5) (3)〜(4)の処理を4回繰り返す。
(6) キャリブレーションボードをz軸方向に移動させながら(2)〜(5)の処理を4回繰り返す。
一般的な平面の式は、
外積cはベクトルaとベクトルbにそれぞれ垂直なベクトルである。
ベクトルaとベクトルbの外積cを求めると、
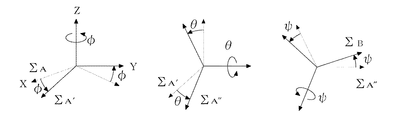
( i )まずΣAをZA軸回りに角度φ回転させた座標系をΣA′とする。
( ii )つぎにΣA′をYA′軸回りに角度θ回転させた座標系をΣA″とする。
( iii )最後に,ΣA″をXA″軸回りに角度ψ回転させた座標系をΣBとする。
本発明の実施例では、位置センサとして三次元磁気センサを利用しているが、これに限らずGPS位置情報取得装置を利用しても良い。前記撮像手段としてCCDカメラを利用しているが、CMOSセンサその他の画像取得センサを利用することは自由である。
Claims (9)
- 被計測体である物体に対して相対的に移動可能な撮像手段と、少なくとも該撮像手段と前記物体との相対的な三次元位置と撮像姿勢方向とのデータを取得できる位置センサと、前記撮像手段で得られた画像データと前記相対的な三次元位置と撮像姿勢方向とのデータを用いて前記物体の形状に関する復元可能なデータとして処理する画像処理手段と、を備えたことを特徴とする三次元形状計測・復元処理装置。
- 前記位置センサは、前記撮像手段の移動に追従するように該撮像手段に固定された三次元磁気センサである請求項1に記載の三次元形状計測・復元処理装置。
- 前記位置センサは、前記撮像手段の移動に追従するように該撮像手段に固定された超音波センサである請求項1に記載の三次元形状計測・復元処理装置。
- 前記位置センサは、前記撮像手段の移動に追従するように該撮像手段に固定された方位センサとGPS位置情報取得装置である請求項1に記載の三次元形状計測・復元処理装置。
- 前記撮像手段は、CCDカメラであり、画像データをデジタルデータで直接取得できるようになっている請求項1ないし4のいずれかに記載の三次元形状計測・復元処理装置。
- 始めに撮像手段と被計測体である物体との相対的な三次元位置と撮像姿勢方向とに関して少なくとも一度のキャリブレーションを行い、前記撮像手段を前記物体に対して撮像を継続しながら相対的に移動させて撮像データを取得し、さらに位置センサによりこの撮像データとリンクする少なくとも前記撮像手段と前記物体との相対的な三次元位置と撮像姿勢方向とのデータを取得し、画像処理手段によりこれら撮像手段で得られた画像データと前記相対的な三次元位置と撮像姿勢方向との少なくとも3つのデータを用いて前記物体の形状に関する復元可能なデータを得ることを特徴とする三次元形状計測・復元処理方法。
- 前記物体の一方向から前記撮像手段による画像取得である撮影を行い、計測対象の物
体を含む領域のデータを取り出し、前記撮像手段を移動させて多方向からの画像取得
である撮影を行い、その結果を重ね、取り出した領域に水平面と平行な面を設定し、
その平面上で対象の断面形状を算出し、設定した水平面と平行な面の位置をその水平
を保ちながら上下方向に変えて算出を繰り返し行い、対象全体の形状を復元する請求
項6に記載の三次元形状計測・復元処理方法。 - 前記物体の多方向から前記撮像手段による画像取得である撮影を行い、各方向において計測対象の物体を含む候補領域のデータを取り出し、取り出した各候補領域内に水平面と平行な面を設定し、その平面上で各候補領域の断面形状を算出し、同一平面内で各候補領域の断面形状を重ね合わせ重複した部分を抽出することで,その平面における計測対象の断面形状を決定し,水平面と平行な面の位置をその平行を保ちながら上下方向に移動させ,各水平面の位置において上記計測対象の断面形状の決定を繰り返し行って,対象全体である物体の形状を復元する請求項6に記載の三次元形状計測・復元処理方法。
- 対象全体である物体をCCDカメラで取り込み、同時にCCDカメラの位置と姿勢を位置センサであるレシーバにより計測し、得られた画像に二値化、輪郭抽出などの処理を行ってカメラ座標を読み取り、前もって得たキャリブレーションデータを元にカメラ座標をレシーバ座標に変換し、更にレシーバ座標を撮影時のカメラの位置と姿勢を元にワールド座標に変換し、カメラを移動させて次のシルエットの撮影を行い、上記処理を繰り返し行って、全ての輪郭の計測が終了した後、全輪郭を表示し、交点を算出し、全ての結果より対象の形状を復元する請求項6に記載の三次元形状計測・復元処理方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004109920A JP2005292027A (ja) | 2004-04-02 | 2004-04-02 | 三次元形状計測・復元処理装置および方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004109920A JP2005292027A (ja) | 2004-04-02 | 2004-04-02 | 三次元形状計測・復元処理装置および方法 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2005292027A true JP2005292027A (ja) | 2005-10-20 |
Family
ID=35325107
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2004109920A Pending JP2005292027A (ja) | 2004-04-02 | 2004-04-02 | 三次元形状計測・復元処理装置および方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2005292027A (ja) |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2013514889A (ja) * | 2009-12-22 | 2013-05-02 | コミッサリア ア レネルジ アトミック エ オー エネルジス アルテルナティヴス | レーザアブレーション装置を用いて且つキャリブレーションステップの利用を通じて三次元表面を切除する方法、及び、その方法を実行する装置 |
| CN108876933A (zh) * | 2017-05-11 | 2018-11-23 | 富士施乐株式会社 | 三维形状数据的编辑装置和编辑三维形状数据的方法 |
| JP2021085757A (ja) * | 2019-11-27 | 2021-06-03 | 国立大学法人神戸大学 | 顕微鏡による焦点画像群を用いた形状計測方法及び装置 |
| CN113223175A (zh) * | 2021-05-12 | 2021-08-06 | 武汉中仪物联技术股份有限公司 | 基于真实姿态角的管道三维非线性模型构建方法和系统 |
| CN115752294A (zh) * | 2022-11-22 | 2023-03-07 | 哈尔滨工业大学 | 一种航空发动机大型复杂轴类三维表面轮廓测量方法 |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH05135155A (ja) * | 1991-11-14 | 1993-06-01 | A T R Tsushin Syst Kenkyusho:Kk | 連続シルエツト画像による3次元モデル構成装置 |
| JPH11118438A (ja) * | 1997-10-15 | 1999-04-30 | Matsushita Electric Ind Co Ltd | 3次元形状測定方法および装置 |
| JP2000346634A (ja) * | 1999-06-09 | 2000-12-15 | Minolta Co Ltd | 3次元入力装置 |
| JP2003203252A (ja) * | 2001-10-26 | 2003-07-18 | Canon Inc | 画像表示装置及びその方法並びに記憶媒体 |
| JP2003216933A (ja) * | 2002-01-28 | 2003-07-31 | Minolta Co Ltd | データ処理装置、記録媒体およびプログラム |
| JP2004062757A (ja) * | 2002-07-31 | 2004-02-26 | Canon Inc | 情報処理方法および撮像部位置姿勢推定装置 |
-
2004
- 2004-04-02 JP JP2004109920A patent/JP2005292027A/ja active Pending
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH05135155A (ja) * | 1991-11-14 | 1993-06-01 | A T R Tsushin Syst Kenkyusho:Kk | 連続シルエツト画像による3次元モデル構成装置 |
| JPH11118438A (ja) * | 1997-10-15 | 1999-04-30 | Matsushita Electric Ind Co Ltd | 3次元形状測定方法および装置 |
| JP2000346634A (ja) * | 1999-06-09 | 2000-12-15 | Minolta Co Ltd | 3次元入力装置 |
| JP2003203252A (ja) * | 2001-10-26 | 2003-07-18 | Canon Inc | 画像表示装置及びその方法並びに記憶媒体 |
| JP2003216933A (ja) * | 2002-01-28 | 2003-07-31 | Minolta Co Ltd | データ処理装置、記録媒体およびプログラム |
| JP2004062757A (ja) * | 2002-07-31 | 2004-02-26 | Canon Inc | 情報処理方法および撮像部位置姿勢推定装置 |
Cited By (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2013514889A (ja) * | 2009-12-22 | 2013-05-02 | コミッサリア ア レネルジ アトミック エ オー エネルジス アルテルナティヴス | レーザアブレーション装置を用いて且つキャリブレーションステップの利用を通じて三次元表面を切除する方法、及び、その方法を実行する装置 |
| CN108876933A (zh) * | 2017-05-11 | 2018-11-23 | 富士施乐株式会社 | 三维形状数据的编辑装置和编辑三维形状数据的方法 |
| CN108876933B (zh) * | 2017-05-11 | 2023-04-28 | 富士胶片商业创新有限公司 | 三维形状数据的编辑装置和编辑三维形状数据的方法 |
| JP2021085757A (ja) * | 2019-11-27 | 2021-06-03 | 国立大学法人神戸大学 | 顕微鏡による焦点画像群を用いた形状計測方法及び装置 |
| CN113223175A (zh) * | 2021-05-12 | 2021-08-06 | 武汉中仪物联技术股份有限公司 | 基于真实姿态角的管道三维非线性模型构建方法和系统 |
| CN113223175B (zh) * | 2021-05-12 | 2023-05-05 | 武汉中仪物联技术股份有限公司 | 基于真实姿态角的管道三维非线性模型构建方法和系统 |
| CN115752294A (zh) * | 2022-11-22 | 2023-03-07 | 哈尔滨工业大学 | 一种航空发动机大型复杂轴类三维表面轮廓测量方法 |
| CN115752294B (zh) * | 2022-11-22 | 2024-01-23 | 哈尔滨工业大学 | 一种航空发动机大型复杂轴类三维表面轮廓测量方法 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN111462213B (zh) | 一种在运动过程中获取物体3d坐标及尺寸的设备及方法 | |
| JP6426968B2 (ja) | 情報処理装置およびその方法 | |
| CN106595528B (zh) | 一种基于数字散斑的远心显微双目立体视觉测量方法 | |
| KR101604037B1 (ko) | 카메라와 레이저 스캔을 이용한 3차원 모델 생성 및 결함 분석 방법 | |
| CN101821580B (zh) | 用于实物形状的三维测量的系统和方法 | |
| CN107025663A (zh) | 视觉系统中用于3d点云匹配的杂波评分系统及方法 | |
| CN113532329A (zh) | 一种以投射光斑为标定点的标定方法 | |
| JP2019534510A5 (ja) | ||
| CN112161619A (zh) | 位姿检测方法、三维扫描路径规划方法和检测系统 | |
| JP5463584B2 (ja) | 変位計測方法、変位計測装置及び変位計測プログラム | |
| JPWO2011070927A1 (ja) | 点群データ処理装置、点群データ処理方法、および点群データ処理プログラム | |
| CN111445529B (zh) | 一种基于多激光测距的标定设备及方法 | |
| JP2012058076A (ja) | 3次元計測装置及び3次元計測方法 | |
| Hosseininaveh et al. | Towards fully automatic reliable 3D acquisition: From designing imaging network to a complete and accurate point cloud | |
| JP2011242183A (ja) | 画像処理装置、画像処理方法およびプログラム | |
| CN112016570A (zh) | 用于背景板同步旋转采集中的三维模型生成方法 | |
| KR102109814B1 (ko) | 영상 정합 장치 및 방법 | |
| JP2017003525A (ja) | 三次元計測装置 | |
| JP2007508557A (ja) | 三次元物体を走査するための装置 | |
| CN118642121B (zh) | 单目视觉测距与激光点云融合的空间定位方法及系统 | |
| Grifoni et al. | 3D multi-modal point clouds data fusion for metrological analysis and restoration assessment of a panel painting | |
| Siddique et al. | 3d object localization using 2d estimates for computer vision applications | |
| KR101673144B1 (ko) | 부분 선형화 기반의 3차원 영상 정합 방법 | |
| JP2005292027A (ja) | 三次元形状計測・復元処理装置および方法 | |
| JPH05135155A (ja) | 連続シルエツト画像による3次元モデル構成装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20070316 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20091008 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20091013 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20091209 |
|
| A131 | Notification of reasons for refusal |
Effective date: 20100112 Free format text: JAPANESE INTERMEDIATE CODE: A131 |
|
| A02 | Decision of refusal |
Effective date: 20100511 Free format text: JAPANESE INTERMEDIATE CODE: A02 |