JP2005291916A - 測位装置 - Google Patents
測位装置 Download PDFInfo
- Publication number
- JP2005291916A JP2005291916A JP2004107302A JP2004107302A JP2005291916A JP 2005291916 A JP2005291916 A JP 2005291916A JP 2004107302 A JP2004107302 A JP 2004107302A JP 2004107302 A JP2004107302 A JP 2004107302A JP 2005291916 A JP2005291916 A JP 2005291916A
- Authority
- JP
- Japan
- Prior art keywords
- antenna
- radio wave
- coordinate system
- wave transmitter
- angle
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 239000013598 vector Substances 0.000 claims description 35
- 238000013528 artificial neural network Methods 0.000 claims description 29
- 230000003071 parasitic effect Effects 0.000 claims description 22
- 238000011156 evaluation Methods 0.000 claims description 19
- 238000004364 calculation method Methods 0.000 claims description 18
- 239000011159 matrix material Substances 0.000 claims description 16
- 238000012937 correction Methods 0.000 claims description 9
- 244000045947 parasite Species 0.000 claims description 9
- 230000005540 biological transmission Effects 0.000 claims description 5
- 238000006243 chemical reaction Methods 0.000 claims description 5
- 230000002265 prevention Effects 0.000 claims description 3
- 230000007423 decrease Effects 0.000 claims 1
- 238000001514 detection method Methods 0.000 description 16
- 238000004891 communication Methods 0.000 description 14
- 230000006870 function Effects 0.000 description 11
- 238000000034 method Methods 0.000 description 9
- 238000010586 diagram Methods 0.000 description 5
- 238000007781 pre-processing Methods 0.000 description 4
- 230000005284 excitation Effects 0.000 description 3
- 230000001133 acceleration Effects 0.000 description 2
- 230000000295 complement effect Effects 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 230000005484 gravity Effects 0.000 description 1
- 238000009434 installation Methods 0.000 description 1
- 238000005259 measurement Methods 0.000 description 1
- 230000005404 monopole Effects 0.000 description 1
- 210000002569 neuron Anatomy 0.000 description 1
- 230000004044 response Effects 0.000 description 1
- 229920006395 saturated elastomer Polymers 0.000 description 1
Images
Landscapes
- Position Fixing By Use Of Radio Waves (AREA)
Abstract
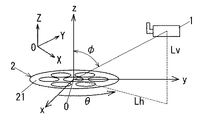
【解決手段】アンテナ装置2は、電波発信器1からの電波を受信し、アンテナ装置2に設けたアンテナ21を原点として設定されるアンテナ座標系における電波の到来方向を検出する。アンテナ座標系は三次元の極座標であり、電波発信器1から原点に向かう電波がz軸に対してなす角度φと、z軸と電波発信器1とを含む平面がx軸に対してなす角度θとを求める。アンテナ装置2では、電波発信器1のxy平面からの距離Lvを既知情報に用いて、アンテナ座標系における電波発信器1とアンテナ21との相対位置を算出する。
【選択図】 図1
Description

φ=arg{f1([x])+if2([x])}
θ=arg{f3([x])+if4([x])}
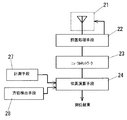
上述した説明から明らかなように、ニューラルネットワーク23から4種類の出力値cosφ,sinφ,cosθ,sinθを出力する場合には、到来方向φ,θを求める演算をニューラルネットワーク23とは別に行う必要があるから、ニューラルネットワーク23の後段に設けた位置演算手段24を用いて上式の演算を行い到来方向φ,θを算出する。
x(t)=[(U+YZ)−1[yo]]T[a(φ,θ)][s(t)]
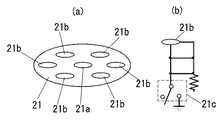
ただし、Uは単位行列、Yは相互アドミタンス行列、Zはインピーダンス行列、[y0]は相互アドミタンス行列Yの第1列ベクトルである。上式は受信出力x(t)を、放射素子21aと各パラサイト素子21bとのそれぞれの組からなる各アンテナの出力の合成とみなしており、ステアリングベクトル[a(φ,θ)]は、放射素子21aと各パラサイト素子21bとのそれぞれの組からなる各アンテナの出力を成分に持つベクトルと言える。
2 アンテナ装置
21 アンテナ
21a 放射素子
21b パラサイト素子
23 ニューラルネットワーク
24 位置演算手段
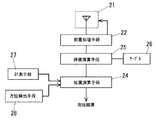
25 評価演算手段
26 テーブル
27 計測手段
28 方位検出手段
Claims (9)
- 電波を送信する電波発信器と、電波発信器からの電波を受信するアンテナを備えアンテナを原点として設定されるアンテナ座標系における電波の到来方向を検出するアンテナ装置と、アンテナ座標系の1つの基準軸と電波発信器とを含む平面内において前記基準軸の軸方向におけるアンテナと電波発信器との距離を既知情報に用いて前記到来方向からアンテナ座標系における電波発信器とアンテナとの相対位置を算出する位置演算手段とを備えることを特徴とする測位装置。
- 前記アンテナ座標系は三次元の極座標であって、前記アンテナ装置は、アンテナ座標系の原点と前記電波発信器とを結ぶ直線が前記基準軸に対してなす第1の角度と、前記基準軸と電波発信器とを含む平面がアンテナ座標系の他の基準軸に対してなす第2の角度とを前記到来方向として同時に計測することを特徴とする請求項1記載の測位装置。
- 前記アンテナは複数個のパラサイト素子を備えパラサイト素子の負荷状態を切り替えることにより受信指向性を変化させる電子走査アンテナであって、アンテナ装置は、電子走査アンテナの負荷状態を時間変化させたときの負荷状態ごとの受信強度から求めた相関行列の成分からなるベクトルを入力とし、前記第1の角度と前記第2の角度とにそれぞれ対応した出力値を出力するニューラルネットワークを備えることを特徴とする請求項2記載の測位装置。
- 前記ニューラルネットワークの出力は、前記第1の角度および前記第2の角度の正弦および余弦の4つの出力値であることを特徴とする請求項3記載の測位装置。
- 前記アンテナは複数個のパラサイト素子を備えパラサイト素子の負荷状態を切り替えることにより受信指向性を変化させる電子走査アンテナであって、アンテナ装置は、前記第1の角度および第2の角度の組と各パラサイト素子に対応するアンテナ出力を成分に持つステアリングベクトルとを対応付けたテーブルと、電子走査アンテナの負荷状態を時間変化させたときの負荷状態ごとの受信強度から求めた相関行列の成分からなるベクトルを入力とし、当該ベクトルとテーブルに格納したステアリングベクトルとの距離が小さいほど値が大きくなるように設定した評価関数の演算を行い、評価関数が最大になるステアリングベクトルをテーブルから求め当該ステアリングベクトルに対応する第1の角度および第2の角度との組を出力する評価演算手段とを備えることを特徴とする請求項2記載の測位装置。
- 前記アンテナ装置は、前記基準軸の軸方向におけるアンテナと電波発信器との距離を計測する計測手段を備えることを特徴とする請求項1記載の測位装置。
- 前記電波発信器と前記アンテナ装置とを含む空間に固定的に設定されアンテナ座標系の前記基準軸が平行になる基準軸を備えた絶対座標系における他の基準軸の方位を検出する方位検出手段を備え、前記位置演算手段は、別途求めた電波発信器の絶対座標系における座標位置と方位検出手段で求めた方向に基づいて前記アンテナ座標系から絶対座標系に座標変換することにより、電波発信器に対するアンテナの位置を絶対座標系において求めることを特徴とする請求項1ないし請求項6のいずれか1項に記載の測位装置。
- 絶対座標系の1つの基準軸に対してアンテナ座標系の前記基準軸を平行に保つ傾斜防止手段を設けたことを特徴とする請求項7記載の測位装置。
- 絶対座標系の1つの基準軸に対するアンテナ座標系の前記基準軸の傾斜角度を検出する傾きセンサと、傾きセンサにより検出された傾斜角度に応じて前記電波発信器からの電波の到来方向の補正演算を行う補正演算手段とを備えることを特徴とする請求項7記載の測位装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004107302A JP3963179B2 (ja) | 2004-03-31 | 2004-03-31 | 測位装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004107302A JP3963179B2 (ja) | 2004-03-31 | 2004-03-31 | 測位装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2005291916A true JP2005291916A (ja) | 2005-10-20 |
| JP3963179B2 JP3963179B2 (ja) | 2007-08-22 |
Family
ID=35325004
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2004107302A Expired - Fee Related JP3963179B2 (ja) | 2004-03-31 | 2004-03-31 | 測位装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP3963179B2 (ja) |
Cited By (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2010085290A (ja) * | 2008-09-30 | 2010-04-15 | Nec Corp | 位置検出装置、位置検出システム、位置検出方法およびプログラム |
| JP2010151807A (ja) * | 2008-11-19 | 2010-07-08 | Panasonic Corp | 無線測位装置及び座標構成方法 |
| JP2015200526A (ja) * | 2014-04-04 | 2015-11-12 | ソフトバンク株式会社 | 情報端末、通信システム、および情報端末の制御プログラム |
| WO2019187259A1 (ja) * | 2018-03-28 | 2019-10-03 | 日本電産株式会社 | 測位システム、測位方法および測位システムの調整方法 |
| JP2022066992A (ja) * | 2020-10-19 | 2022-05-02 | ピクシーダストテクノロジーズ株式会社 | 測位装置、測位方法、および測位プログラム |
| CN115560757A (zh) * | 2022-09-01 | 2023-01-03 | 中国人民解放军战略支援部队信息工程大学 | 随机姿态误差条件下基于神经网络的无人机直接定位校正方法 |
| JP2023141967A (ja) * | 2022-03-24 | 2023-10-05 | 株式会社光電製作所 | 無線装置、地上局装置 |
| CN117439656A (zh) * | 2023-12-08 | 2024-01-23 | 成都时代宇辰科技有限公司 | 一种victs卫星通信天线绝对坐标系自动校正方法 |
-
2004
- 2004-03-31 JP JP2004107302A patent/JP3963179B2/ja not_active Expired - Fee Related
Cited By (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2010085290A (ja) * | 2008-09-30 | 2010-04-15 | Nec Corp | 位置検出装置、位置検出システム、位置検出方法およびプログラム |
| JP2010151807A (ja) * | 2008-11-19 | 2010-07-08 | Panasonic Corp | 無線測位装置及び座標構成方法 |
| JP2015200526A (ja) * | 2014-04-04 | 2015-11-12 | ソフトバンク株式会社 | 情報端末、通信システム、および情報端末の制御プログラム |
| WO2019187259A1 (ja) * | 2018-03-28 | 2019-10-03 | 日本電産株式会社 | 測位システム、測位方法および測位システムの調整方法 |
| JP2022066992A (ja) * | 2020-10-19 | 2022-05-02 | ピクシーダストテクノロジーズ株式会社 | 測位装置、測位方法、および測位プログラム |
| JP2023141967A (ja) * | 2022-03-24 | 2023-10-05 | 株式会社光電製作所 | 無線装置、地上局装置 |
| CN115560757A (zh) * | 2022-09-01 | 2023-01-03 | 中国人民解放军战略支援部队信息工程大学 | 随机姿态误差条件下基于神经网络的无人机直接定位校正方法 |
| CN115560757B (zh) * | 2022-09-01 | 2023-08-22 | 中国人民解放军战略支援部队信息工程大学 | 随机姿态误差条件下基于神经网络的无人机直接定位校正方法 |
| CN117439656A (zh) * | 2023-12-08 | 2024-01-23 | 成都时代宇辰科技有限公司 | 一种victs卫星通信天线绝对坐标系自动校正方法 |
| CN117439656B (zh) * | 2023-12-08 | 2024-02-23 | 成都时代宇辰科技有限公司 | 一种victs卫星通信天线绝对坐标系自动校正方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP3963179B2 (ja) | 2007-08-22 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| AU2020201378B2 (en) | Radar mounting estimation with unstructured data | |
| US10365364B1 (en) | Systems and methods for detecting objects | |
| EP4009071B1 (en) | Method and apparatus for radar accuracy measurements | |
| CN112634654B (zh) | 远程泊车系统 | |
| JP7097867B2 (ja) | 遠隔駐車システム | |
| JP3963179B2 (ja) | 測位装置 | |
| CN119908082A (zh) | 卫星跟踪方法、跟踪处理装置及卫星跟踪系统 | |
| JP2006234683A (ja) | 測位システム | |
| WO2006030832A1 (ja) | 監視装置 | |
| JP2006236132A (ja) | 自律移動ロボット | |
| JP5102403B1 (ja) | レーダ試験装置 | |
| JP5112965B2 (ja) | 車両検索システム | |
| JP2011019067A (ja) | アンテナ装置 | |
| WO2022181488A1 (ja) | 自律移動装置、及び、自律移動システム | |
| CN117724084A (zh) | 用于四维雷达系统的多目标、同时波束形成 | |
| KR101873273B1 (ko) | 반 전력 빔 폭을 이용한 3차원 수중 위치 추정 방법 | |
| EP4327989A1 (en) | Mobile robot | |
| JP2002122659A (ja) | レーダ信号処理方法およびこの方法を用いたレーダ装置 | |
| JPWO2019087778A1 (ja) | 移動体の姿勢センサ装置 | |
| JP2001004738A (ja) | 電波環境模擬試験装置 | |
| JP2009257769A (ja) | 車両検索システム | |
| KR20180083174A (ko) | 전자전 지원 시스템(Warfare Support System)의 신호도래방위각 측정 장치 및 그 방법 | |
| JP2007147534A (ja) | レーダ装置 | |
| JP3135364B2 (ja) | 移動体の姿勢及び位置測定装置 | |
| Koster et al. | Direction of arrival estimation for vehicle-to-person communication using steerable antennas |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A977 | Report on retrieval |
Effective date: 20061122 Free format text: JAPANESE INTERMEDIATE CODE: A971007 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20061219 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20070219 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20070501 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20070514 |
|
| FPAY | Renewal fee payment (prs date is renewal date of database) |
Year of fee payment: 3 Free format text: PAYMENT UNTIL: 20100601 |
|
| S533 | Written request for registration of change of name |
Free format text: JAPANESE INTERMEDIATE CODE: R313533 |
|
| FPAY | Renewal fee payment (prs date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20100601 Year of fee payment: 3 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| FPAY | Renewal fee payment (prs date is renewal date of database) |
Year of fee payment: 3 Free format text: PAYMENT UNTIL: 20100601 |
|
| FPAY | Renewal fee payment (prs date is renewal date of database) |
Year of fee payment: 4 Free format text: PAYMENT UNTIL: 20110601 |
|
| FPAY | Renewal fee payment (prs date is renewal date of database) |
Year of fee payment: 5 Free format text: PAYMENT UNTIL: 20120601 |
|
| FPAY | Renewal fee payment (prs date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120601 Year of fee payment: 5 |
|
| FPAY | Renewal fee payment (prs date is renewal date of database) |
Year of fee payment: 6 Free format text: PAYMENT UNTIL: 20130601 |
|
| LAPS | Cancellation because of no payment of annual fees |