JP2005291320A - 車両用制御装置 - Google Patents
車両用制御装置 Download PDFInfo
- Publication number
- JP2005291320A JP2005291320A JP2004105821A JP2004105821A JP2005291320A JP 2005291320 A JP2005291320 A JP 2005291320A JP 2004105821 A JP2004105821 A JP 2004105821A JP 2004105821 A JP2004105821 A JP 2004105821A JP 2005291320 A JP2005291320 A JP 2005291320A
- Authority
- JP
- Japan
- Prior art keywords
- accelerator opening
- motor
- motors
- region
- vehicle
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images








Classifications
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H3/00—Toothed gearings for conveying rotary motion with variable gear ratio or for reversing rotary motion
- F16H3/44—Toothed gearings for conveying rotary motion with variable gear ratio or for reversing rotary motion using gears having orbital motion
- F16H3/72—Toothed gearings for conveying rotary motion with variable gear ratio or for reversing rotary motion using gears having orbital motion with a secondary drive, e.g. regulating motor, in order to vary speed continuously
- F16H3/727—Toothed gearings for conveying rotary motion with variable gear ratio or for reversing rotary motion using gears having orbital motion with a secondary drive, e.g. regulating motor, in order to vary speed continuously with at least two dynamo electric machines for creating an electric power path inside the gearing, e.g. using generator and motor for a variable power torque path
Landscapes
- Engineering & Computer Science (AREA)
- General Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Hybrid Electric Vehicles (AREA)
- Retarders (AREA)
- Control Of Transmission Device (AREA)
- Electric Propulsion And Braking For Vehicles (AREA)
- Arrangement Of Transmissions (AREA)
Abstract
【解決手段】第1の歯車要素(5)が内燃機関(1)の出力軸に連結し、第2の歯車要素(6)が第2のモータ(11)の出力軸と連結し、第3の歯車要素(8)が第1のモータ(9)の出力軸及び駆動輪に連結した差動歯車装置(4)と、第2のモータの回転を固定する固定手段(12)とを備えたハイブリッド車両に用いられる車両用制御装置において、車速とアクセル開度とによって規定される作動領域に入っているか否かを判定する判定手段(S15)と、前記判定手段の判定結果が肯定の場合に、固定手段(12)を作動する作動手段(S16)を備える。出現頻度の高い運転状態の場合に前記モータが停止するため、モータの発熱を防止し、冷却系の負担軽減を図ることができる。
【選択図】 図1
Description
請求項2に係る車両用制御装置は、内燃機関と二種類のモータとからなる動力発生源と、第1の歯車要素が前記内燃機関の出力軸に連結し、第2の歯車要素が前記二種類のモータのうちの一方のモータの出力軸と連結し、第3の歯車要素が前記二種類のモータのうちの他方のモータの出力軸及び駆動輪に連結した差動歯車装置と、前記二種類のモータのうちの一方のモータの回転を固定する固定手段と、を備えたハイブリッド車両に用いられる車両用制御装置において、前記動力発生源と駆動輪との間に介在する変速手段と、前記変速手段の変速比を検出する変速比検出手段と、アクセル開度を検出するアクセル開度検出手段と、変速比とアクセル開度とによって規定した前記固定手段の作動領域内に、検出された前記変速比及びアクセル開度が入っているか否かを判定する判定する判定手段と、前記判定手段の判定結果が肯定の場合に、前記固定手段の作動を行う作動手段と、を備えたことを特徴とする。
請求項2に係る車両用制御装置では、変速比とアクセル開度とによって規定される運転状態が、変速比とアクセル開度とによって規定される固定手段の作動領域に入っている場合に固定手段を作動してモータを固定する。車速が変速比に置き換わった点を除き、請求項1の発明と同じであるから、同様に、出現頻度の高い運転状態の場合に前記モータを停止して、モータの発熱を防止し、冷却系の負担軽減を図ることができる。
<モータ走行モード>
内燃機関1を使用しない走行モードであり、発進時や極低車速走行の際に用いられるモードである。このモードでは、第2のモータ11の出力トルクを0に制御すると共に、多板ブレーキ12を解放状態(すなわち、可動側摩擦板12aと固定側摩擦板12bとを非締結状態)にした上で、第1のモータ9の出力トルクを制御して所望の駆動力(アクセル開度Fに対応した駆動力)を得られるようにする。
もっぱら内燃機関1を使用する走行モードであり、高車速走行の際などに用いられるモードである。このモードでは、多板ブレーキ12を締結状態(すなわち、可動側摩擦板12aと固定側摩擦板12bとを締結状態)にした上で、クラッチ3を接続し、内燃機関1の出力トルクを制御して所望の駆動力(アクセル開度Fに対応した駆動力)を得られるようにする。
ハイブリッド車両特有の走行モードであり、極低車速や高車速走行を除く一般走行時に用いられるモードである。このモードの特徴は、内燃機関1を最適効率点で運転(理想運転状態ともいう。)すると共に、その運転状態にあるときの内燃機関1の不足駆動力や過大駆動力を第1のモータ9や第2のモータ11の力行や回生動作で補うことにある。このモードでは、多板ブレーキ12を解放状態(すなわち、可動側摩擦板12aと固定側摩擦板12bとを非締結状態)にした上で、クラッチ3を接続し、内燃機関1の運転状態を上記の理想運転状態にすると共に、第1のモータ9や第2のモータ11の出力トルクや回転数を制御して、所望の駆動力(アクセル開度Fに対応した駆動力)を得られるようにする。
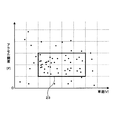
図9は、所定の運転領域23の他の好ましい変形例を示す図である。この図において、縦軸はアクセル開度F、横軸は機械式無段変速機のギア比(図1の機械式変速装置16から出力される変速位置Sから割り出された変速比)であり、ハッチングで示す部分が、多板ブレーキ12を強制的にONとする所定の運転領域23である。この例によれば、アクセル開度Fと変速比をチェックしてそれらが所定の所定の運転領域23に入っているときに、多板ブレーキ12をONとするので、多板ブレーキON制御処理(図4参照)の簡略化を図ることができる(請求項2に対応する効果)。
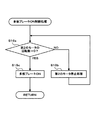
S15 ステップ(判定手段)
S16 ステップ(作動手段)
V 車速
1 内燃機関
2 出力軸(内燃機関の出力軸)
4 遊星歯車機構(差動歯車装置)
5 キャリア(第1の歯車要素)
6 太陽歯車(第2の歯車要素)
8 リング歯車(第3の歯車要素)
9 第1のモータ(二種類のモータのうちの他方のモータ)
9b 出力軸(二種類のモータのうちの他方のモータの出力軸)
11 第2のモータ(二種類のモータのうちの一方のモータ)
11b 出力軸(二種類のモータのうちの一方のモータの出力軸)
12 多板ブレーキ(固定手段)
16 機械式変速装置(変速手段)
18 駆動輪
19a CPU(判定手段、停止手段、領域変更手段)
20 車速センサ(車速検出手段)
21 アクセル開度センサ(アクセル開度検出手段)
23 所定の運転領域(固定手段の作動領域)
23a〜23d 所定の運転領域(固定手段の作動領域)
Claims (5)
- 内燃機関と二種類のモータとからなる動力発生源と、
第1の歯車要素が前記内燃機関の出力軸に連結し、第2の歯車要素が前記二種類のモータのうちの一方のモータの出力軸と連結し、第3の歯車要素が前記二種類のモータのうちの他方のモータの出力軸及び駆動輪に連結した差動歯車装置と、
前記二種類のモータのうちの一方のモータの回転を固定する固定手段と
を備えたハイブリッド車両に用いられる車両用制御装置において、
車速を検出する車速検出手段と、
アクセル開度を検出するアクセル開度検出手段と、
車速とアクセル開度とによって規定した前記固定手段の作動領域内に、検出された前記車速及びアクセル開度が入っているか否かを判定する判定する判定手段と、
前記判定手段の判定結果が肯定の場合に、前記固定手段の作動を行う作動手段と
を備えたことを特徴とする車両用制御装置。 - 内燃機関と二種類のモータとからなる動力発生源と、
第1の歯車要素が前記内燃機関の出力軸に連結し、第2の歯車要素が前記二種類のモータのうちの一方のモータの出力軸と連結し、第3の歯車要素が前記二種類のモータのうちの他方のモータの出力軸及び駆動輪に連結した差動歯車装置と、
前記二種類のモータのうちの一方のモータの回転を固定する固定手段と
を備えたハイブリッド車両に用いられる車両用制御装置において、
前記動力発生源と駆動輪との間に介在する変速手段と、
前記変速手段の変速比を検出する変速比検出手段と、
アクセル開度を検出するアクセル開度検出手段と、
変速比とアクセル開度とによって規定した前記固定手段の作動領域内に、検出された前記変速比及びアクセル開度が入っているか否かを判定する判定する判定手段と、
前記判定手段の判定結果が肯定の場合に、前記固定手段の作動を行う作動手段と
を備えたことを特徴とする車両用制御装置。 - 前記車速検出手段とアクセル開度検出手段の各々によって検出された車速及びアクセル開度の過去の履歴に基づいて、前記固定手段の作動領域を変更する領域変更手段を備えることを特徴とする請求項1記載の車両用制御装置。
- 前記変速比検出手段とアクセル開度検出手段の各々によって検出された変速比及びアクセル開度の過去の履歴に基づいて、前記固定手段の作動領域を変更する領域変更手段を備えていることを特徴とする請求項2記載の車両用制御装置。
- 前記ハイブリッド車両の現在位置や走行予定経路及び該経路上の交通情報を取得する情報取得手段と、
前記情報取得手段によって取得した情報から車速または変速比とアクセル開度の今後の出願頻度を推定し、前記固定手段の作動領域を変更する領域変更手段を備えたことを特徴とする請求項1または2記載の車両用制御装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004105821A JP3916080B2 (ja) | 2004-03-31 | 2004-03-31 | 車両用制御装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004105821A JP3916080B2 (ja) | 2004-03-31 | 2004-03-31 | 車両用制御装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2005291320A true JP2005291320A (ja) | 2005-10-20 |
| JP3916080B2 JP3916080B2 (ja) | 2007-05-16 |
Family
ID=35324484
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2004105821A Expired - Fee Related JP3916080B2 (ja) | 2004-03-31 | 2004-03-31 | 車両用制御装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP3916080B2 (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2007097464A1 (ja) * | 2006-02-21 | 2007-08-30 | Toyota Jidosha Kabushiki Kaisha | ハイブリッド車両の制御装置 |
| CN112424041A (zh) * | 2018-07-24 | 2021-02-26 | 博世株式会社 | 混合动力车辆的控制装置及控制方法 |
-
2004
- 2004-03-31 JP JP2004105821A patent/JP3916080B2/ja not_active Expired - Fee Related
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2007097464A1 (ja) * | 2006-02-21 | 2007-08-30 | Toyota Jidosha Kabushiki Kaisha | ハイブリッド車両の制御装置 |
| US8340849B2 (en) | 2006-02-21 | 2012-12-25 | Toyota Jidosha Kabushiki Kaisha | Hybrid vehicle controller |
| US8515607B2 (en) | 2006-02-21 | 2013-08-20 | Toyota Jidosha Kabushiki Kaisha | Hybrid vehicle controller |
| CN112424041A (zh) * | 2018-07-24 | 2021-02-26 | 博世株式会社 | 混合动力车辆的控制装置及控制方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP3916080B2 (ja) | 2007-05-16 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP3401181B2 (ja) | ハイブリッド車の駆動制御装置 | |
| JP3931457B2 (ja) | ハイブリッド車両の充電制御装置 | |
| EP1256476B1 (en) | Hybrid electric vehicle energy management | |
| JP5248683B2 (ja) | 車両クルーズコントロールを制御する方法及び装置 | |
| JP6060839B2 (ja) | ハイブリッド車両の制御装置 | |
| JP2001169408A (ja) | ハイブリッド車両の制御装置 | |
| JP2010089777A (ja) | ドライブトレインを操作するための方法 | |
| JP2008224046A (ja) | 自動変速機の制御装置 | |
| JP5838717B2 (ja) | ハイブリッド車両の駆動装置 | |
| JP4135030B1 (ja) | 車両の制御装置、制御方法、その方法を実現するプログラムおよびそのプログラムを記録した記録媒体 | |
| JP2020023280A (ja) | ハイブリッド車両の制御装置 | |
| JP4055733B2 (ja) | 温度調節装置および温度調節方法 | |
| JP5277198B2 (ja) | ハイブリッド車両制御装置 | |
| JP2005265025A (ja) | ハイブリッド車のモード遷移制御装置 | |
| JP4055725B2 (ja) | ハイブリッド車のモード遷移制御装置 | |
| CN116476801A (zh) | 混合动力车及其控制方法 | |
| JP4023445B2 (ja) | ハイブリッド車両の制御装置 | |
| JP2010280334A (ja) | 車両用制御装置 | |
| JP5387152B2 (ja) | 車両走行制御装置 | |
| JP4324186B2 (ja) | 自動車およびその制御方法 | |
| JP2011097706A (ja) | 車両の電動機冷却制御装置 | |
| JP2009298269A (ja) | ハイブリッド車両の制御装置 | |
| JP3916080B2 (ja) | 車両用制御装置 | |
| JP2005093120A (ja) | 燃料電池の制御装置及び制御方法 | |
| JP4158773B2 (ja) | 車両の制御装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20060210 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20060928 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20061122 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20061221 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20070104 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20070201 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20070201 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20100216 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20110216 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20110216 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120216 Year of fee payment: 5 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120216 Year of fee payment: 5 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130216 Year of fee payment: 6 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130216 Year of fee payment: 6 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20140216 Year of fee payment: 7 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20140216 Year of fee payment: 7 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20150216 Year of fee payment: 8 |
|
| LAPS | Cancellation because of no payment of annual fees |