JP2005066041A - 超音波探触子及び超音波診断装置 - Google Patents
超音波探触子及び超音波診断装置 Download PDFInfo
- Publication number
- JP2005066041A JP2005066041A JP2003300325A JP2003300325A JP2005066041A JP 2005066041 A JP2005066041 A JP 2005066041A JP 2003300325 A JP2003300325 A JP 2003300325A JP 2003300325 A JP2003300325 A JP 2003300325A JP 2005066041 A JP2005066041 A JP 2005066041A
- Authority
- JP
- Japan
- Prior art keywords
- pressure
- frame data
- ultrasonic
- signal
- elastic
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images











Classifications
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02A—TECHNOLOGIES FOR ADAPTATION TO CLIMATE CHANGE
- Y02A90/00—Technologies having an indirect contribution to adaptation to climate change
- Y02A90/10—Information and communication technologies [ICT] supporting adaptation to climate change, e.g. for weather forecasting or climate simulation
Abstract
【解決手段】 超音波の送受信面を覆うように圧計測用変形体手段を設け、その超音波探触子を用いて被検体の診察部位を圧迫する。この圧計測用変形体手段が被検体表皮との境界部分の圧力に応じて変形するようになるので、その変形の状態を信号処理で求め、それに基づいて超音波探触子によって圧迫された診断部位の体表に与えられた圧力を計測する。その圧力に基づいて高画質な弾性画像を取得する。
【選択図】 図1
Description
圧力(応力)pi=Ym×(歪み量δdi)
(i=1,2,3・・・n)………(1)
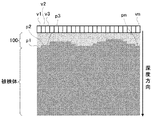
の関係があり、データ領域d1,d2,d3・・・dnの内部における圧力分布をそれぞれ圧力分布p1,p2,p3・・・pnとして求めることができる。これらの圧力分布pd1,pd2,pd3・・・pdnを解析することにより、図6に示したような、被検体1の表皮と圧計測用変形体100の境界における圧力をそれぞれ圧力p1,p2,3・・・pnとして、個々の振動子v1,v2,v3・・・vnの垂直下の圧力を求めることができる。
歪み量Di=Δdi/D (i=1,2,3・・・n)………(2)
として計算される。そして、この歪み量Diを上記式(1)に代入すれば、同様にして被検体1の表皮と圧計測用変形体100の境界におけるそれぞれの圧力p1,p2,3・・・pnを求めることができる。
Ymi,j=(ΔPi,j)/(ΔLi,j/ΔX)
このようにして求められた弾性率Ymi,jにより、各点の弾性率が求められ、弾性データ処理部24によって2次元の弾性画像データが連続的に得られる。
10…超音波探触子
11…超音波送受信制御回路
12…送信回路
13…受信回路
14…整相加算回路
15…信号処理部
16…白黒スキャンコンバータ
17…表示画像データ切換加算器
18…画像表示器
19…RF信号フレームデータ選択部
20…変位・歪み演算部
21…圧力演算部
211…境界検出回路
212…圧力演算回路
22…被検体圧迫機構
23…弾性率演算部
24…弾性データ処理部
25…カラースキャンコンバータ
100…圧計測用変形体
101…超音波送受信面
31…圧迫板
71〜76…圧力センサー
Claims (8)
- 被検体の診断部位を圧迫した際に体表に与えられた圧力の情報を取得するために超音波送受信面を覆うように圧計測用変形体手段を設けたことを特徴とする超音波探触子。
- 請求項1において、前記圧計測用変形体手段は、音響結合材料や音響レンズ素材などの超音波減衰が小さく、且つ、音速、音響インピーダンスが生体内のものに近いなど、生体との結合特性に優れた素材にて構成されたことを特徴とする超音波探触子。
- 請求項1又は2の超音波探触子を用いて被検体に対して超音波を送信及び受信する超音波送受信手段と、
前記超音波の送信及び受信を制御する超音波送受信制御手段と、
前記超音波送受信手段から出力される反射エコー信号を用いて運動組織を含む被検体内のRF信号フレームデータを所定周期で繰り返し取得する断層走査手段と、
前記断層走査手段によって取得された時系列の複数のRF信号フレームデータの信号処理を行う信号処理手段と、
前記信号処理手段からの時系列の断層フレームデータを白黒断層像データに変換する断層フレームデータ情報変換手段と、
上記断層走査手段によって取得された時系列の複数のRF信号フレームデータ群の中から、変位計測の対象となるRF信号フレームデータの組を選択するRF信号フレームデータ選択手段と、
前記RF信号フレームデータ選択手段によって選択されたRF信号フレームデータの組に基づいて断層像上の各点の変位及び歪みを演算する変位・歪み演算手段と、
前記RF信号フレームデータ選択手段によって得られたRF信号フレームデータの中に含まれる前記被検体及び前記圧計測用変形体手段からの超音波反射信号に基づいて前記被検体の診断部位の体表に与えられた圧力を演算する圧力演算手段と、
前記変位・歪み演算手段及び前記圧力演算手段によって求められた前記歪み及び圧力から断層像上の各点の弾性率を演算して弾性フレームデータを生成する弾性率演算手段と、
前記弾性率演算手段からの弾性フレームデータを入力して弾性フレームデータの信号処理を行う弾性データ処理手段と、
前記弾性データ処理手段からの弾性フレームデータを入力して色相情報もしくは白黒輝度情報の付与された弾性画像データを出力する弾性フレームデータ情報変換手段と、
前記断層フレームデータ情報変換手段からの前記白黒断層像データと、前記色相情報変換手段からの前記弾性画像データとを加算したもの又は独立したものを画像データとして出力する切替加算手段と、
前記切替加算手段から出力される画像データを表示する画像表示手段と
を備えたことを特徴とする超音波診断装置。 - 超音波探触子を用いて被検体に対して超音波を送信及び受信する超音波送受信手段と、
前記超音波の送信及び受信を制御する超音波送受信制御手段と、
前記超音波探触子と前記被検体との間に設けられた適切な弾性を有する圧計測用変形体手段と、
前記超音波送受信手段から出力される反射エコー信号を用いて運動組織を含む被検体内のRF信号フレームデータを所定周期で繰り返し取得する断層走査手段と、
前記断層走査手段によって取得された時系列の複数のRF信号フレームデータの信号処理を行う信号処理手段と、
前記信号処理手段からの時系列の断層フレームデータを白黒断層像データに変換する断層フレームデータ情報変換手段と、
上記断層走査手段によって取得された時系列の複数のRF信号フレームデータ群の中から、変位計測の対象となるRF信号フレームデータの組を選択するRF信号フレームデータ選択手段と、
前記RF信号フレームデータ選択手段によって選択されたRF信号フレームデータの組に基づいて断層像上の各点の変位及び歪みを演算する変位・歪み演算手段と、
前記RF信号フレームデータ選択手段によって得られたRF信号フレームデータの中に含まれる前記被検体及び前記圧計測用変形体手段からの超音波反射信号に基づいて前記被検体の診断部位の体表に与えられた圧力を演算する圧力演算手段と、
前記変位・歪み演算手段及び前記圧力演算手段によって求められた前記歪み及び圧力から断層像上の各点の弾性率を演算して弾性フレームデータを生成する弾性率演算手段と、
前記弾性率演算手段からの弾性フレームデータを入力して弾性フレームデータの信号処理を行う弾性データ処理手段と、
前記弾性データ処理手段からの弾性フレームデータを入力して色相情報もしくは白黒輝度情報の付与された弾性画像データを出力する弾性フレームデータ情報変換手段と、
前記断層フレームデータ情報変換手段からの前記白黒断層像データと、前記色相情報変換手段からの前記弾性画像データとを加算したもの又は独立したものを画像データとして出力する切替加算手段と、
前記切替加算手段から出力される画像データを表示する画像表示手段と
を備えたことを特徴とする超音波診断装置。 - 請求項4において、前記圧計測用変形体手段は、音響結合材料や音響レンズ素材などの超音波減衰が小さく、且つ、音速、音響インピーダンスが生体内のものに近いなど、生体との結合特性に優れた素材にて構成されたことを特徴とする超音波診断装置。
- 請求項3、4又は5において、前記圧力演算手段は、前記RF信号フレームデータ選択手段により得られた前記圧計測用変形体手段の信号を含む前記RF信号フレームデータ又は前記断層走査手段により得られた前記圧計測用変形体手段の信号を含む前記白黒断層像データを利用して前記圧計測用変形体手段における歪み量を求め、前記圧計測用変形体手段における歪み量と前記圧計測用変形体手段の既知の弾性率とを用いて、前記被検体の診断部位を圧迫した際に体表に与えられた圧力を演算することを特徴とする超音波診断装置。
- 請求項3、4又は5において、前記圧力演算手段は、前記RF信号フレームデータ選択手段により得られた前記圧計測用変形体手段の信号を含む前記RF信号フレームデータ又は前記断層走査手段により得られた前記圧計測用変形体手段の信号を含む前記白黒断層像データを利用して前記圧計測用変形体手段の厚さを求め、前記圧計測用変形体手段の厚さと前記圧計測用変形体手段の既知の弾性率とを用いて、前記被検体の診断部位を圧迫した際に体表に与えられた圧力を演算することを特徴とする超音波診断装置。
- 請求項3、4又は5において、前記圧力演算手段は、前記RF信号フレームデータ選択手段により得られた前記圧計測用変形体手段の信号を含む前記RF信号フレームデータ又は前記断層走査手段により得られた前記圧計測用変形体手段の信号を含む前記白黒断層像データを利用して前記圧計測用変形体手段の厚さを求め、前記圧計測用変形体手段の厚さと圧力の関係を示す実測データに基づいて、前記被検体の診断部位を圧迫した際に体表に与えられた圧力を演算することを特徴とする超音波診断装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2003300325A JP2005066041A (ja) | 2003-08-25 | 2003-08-25 | 超音波探触子及び超音波診断装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2003300325A JP2005066041A (ja) | 2003-08-25 | 2003-08-25 | 超音波探触子及び超音波診断装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2005066041A true JP2005066041A (ja) | 2005-03-17 |
| JP2005066041A5 JP2005066041A5 (ja) | 2006-09-07 |
Family
ID=34405290
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2003300325A Pending JP2005066041A (ja) | 2003-08-25 | 2003-08-25 | 超音波探触子及び超音波診断装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2005066041A (ja) |
Cited By (28)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2006040967A1 (ja) * | 2004-10-08 | 2006-04-20 | Hitachi Medical Corporation | 超音波診断装置 |
| EP1747757A1 (en) | 2005-07-27 | 2007-01-31 | Medison Co., Ltd. | Ultrasound system for displaying an elastic image |
| JP2007075184A (ja) * | 2005-09-12 | 2007-03-29 | Hitachi Medical Corp | 超音波診断装置 |
| WO2007046272A1 (ja) | 2005-10-19 | 2007-04-26 | Hitachi Medical Corporation | 弾性画像を生成する超音波診断装置 |
| WO2007086373A1 (ja) * | 2006-01-24 | 2007-08-02 | National Institute Of Advanced Industrial Science And Technology | 超音波診断装置 |
| WO2007116957A1 (ja) * | 2006-04-07 | 2007-10-18 | Hitachi Medical Corporation | 超音波探触子及び超音波診断装置 |
| WO2007138881A1 (ja) | 2006-05-25 | 2007-12-06 | Hitachi Medical Corporation | 超音波診断装置 |
| JP2008154626A (ja) * | 2006-12-20 | 2008-07-10 | Hitachi Medical Corp | 超音波診断装置 |
| KR100847796B1 (ko) * | 2005-07-27 | 2008-07-23 | 주식회사 메디슨 | 탄성영상 형성 및 디스플레이를 위한 초음파 시스템 |
| JP2008183097A (ja) * | 2007-01-29 | 2008-08-14 | Aloka Co Ltd | 経食道プローブ及びそれを備えた超音波診断装置 |
| JP2008188180A (ja) * | 2007-02-02 | 2008-08-21 | Hitachi Medical Corp | 超音波診断装置 |
| JP2008301903A (ja) * | 2007-06-05 | 2008-12-18 | Univ Nihon | 2次元的硬さ測定装置 |
| WO2009131029A1 (ja) | 2008-04-25 | 2009-10-29 | 株式会社 日立メディコ | 超音波診断装置 |
| WO2009131027A1 (ja) * | 2008-04-25 | 2009-10-29 | 株式会社 日立メディコ | 参照変形体、超音波診断装置及び超音波診断方法 |
| WO2009131028A1 (ja) * | 2008-04-25 | 2009-10-29 | 株式会社 日立メディコ | 超音波診断装置 |
| JP2009268640A (ja) * | 2008-05-02 | 2009-11-19 | Kao Corp | 皮膚内部の弾性計測方法 |
| WO2010098233A1 (ja) * | 2009-02-24 | 2010-09-02 | 株式会社 日立メディコ | 超音波診断装置及び弾性画像表示方法 |
| WO2011129237A1 (ja) * | 2010-04-15 | 2011-10-20 | 株式会社 日立メディコ | 超音波診断装置 |
| JP2012100997A (ja) * | 2010-11-12 | 2012-05-31 | Hitachi Medical Corp | 超音波診断装置及びその作動方法 |
| WO2012137983A1 (en) | 2011-04-08 | 2012-10-11 | Canon Kabushiki Kaisha | Subject information acquisition apparatus |
| WO2012161103A1 (en) | 2011-05-26 | 2012-11-29 | Canon Kabushiki Kaisha | Specimen information acquisition apparatus |
| JP5160227B2 (ja) * | 2005-05-09 | 2013-03-13 | 株式会社日立メディコ | 超音波診断装置及び超音波画像表示方法 |
| US8622908B2 (en) | 2005-01-26 | 2014-01-07 | Hitachi Medical Corporation | Pressing member, ultrasonic probe and ultrasonic diagnosing device |
| CN104042235A (zh) * | 2013-03-15 | 2014-09-17 | 精工爱普生株式会社 | 超声波测定装置、超声波图像装置以及测定方法 |
| JP2017012451A (ja) * | 2015-06-30 | 2017-01-19 | キヤノン株式会社 | 被検体支持装置および被検体情報取得装置 |
| EP2595543A4 (en) * | 2010-07-25 | 2017-07-12 | Syneron Medical Ltd. | A method and apparatus for measuring the thickness of adipose tissue |
| KR20200042228A (ko) * | 2018-10-15 | 2020-04-23 | 한국과학기술연구원 | 연조직의 물성을 정량적으로 측정하기 위한 시스템 |
| CN114002331A (zh) * | 2021-11-05 | 2022-02-01 | 湘潭大学 | 一种用于钢绞线受损程度的检测方法 |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0755775A (ja) * | 1993-08-12 | 1995-03-03 | Kiyoshi Nakayama | 弾性計測方法および弾性計測装置 |
| JP2000060853A (ja) * | 1998-08-20 | 2000-02-29 | Hitachi Medical Corp | 超音波診断装置 |
| JP2001519674A (ja) * | 1991-05-10 | 2001-10-23 | ボード、オブ、リージェンツ、ザ、ユニバーシティー、オブ、テキサス、システム | エラストグラフィー測定および撮像法およびこの方法を実施する装置 |
-
2003
- 2003-08-25 JP JP2003300325A patent/JP2005066041A/ja active Pending
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2001519674A (ja) * | 1991-05-10 | 2001-10-23 | ボード、オブ、リージェンツ、ザ、ユニバーシティー、オブ、テキサス、システム | エラストグラフィー測定および撮像法およびこの方法を実施する装置 |
| JPH0755775A (ja) * | 1993-08-12 | 1995-03-03 | Kiyoshi Nakayama | 弾性計測方法および弾性計測装置 |
| JP2000060853A (ja) * | 1998-08-20 | 2000-02-29 | Hitachi Medical Corp | 超音波診断装置 |
Cited By (53)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4897492B2 (ja) * | 2004-10-08 | 2012-03-14 | 株式会社日立メディコ | 超音波診断装置 |
| WO2006040967A1 (ja) * | 2004-10-08 | 2006-04-20 | Hitachi Medical Corporation | 超音波診断装置 |
| US8622908B2 (en) | 2005-01-26 | 2014-01-07 | Hitachi Medical Corporation | Pressing member, ultrasonic probe and ultrasonic diagnosing device |
| JP5160227B2 (ja) * | 2005-05-09 | 2013-03-13 | 株式会社日立メディコ | 超音波診断装置及び超音波画像表示方法 |
| US9060737B2 (en) | 2005-05-09 | 2015-06-23 | Hitachi Medical Corporation | Ultrasonic diagnostic apparatus and ultrasonic image display method |
| EP1747757A1 (en) | 2005-07-27 | 2007-01-31 | Medison Co., Ltd. | Ultrasound system for displaying an elastic image |
| KR100847796B1 (ko) * | 2005-07-27 | 2008-07-23 | 주식회사 메디슨 | 탄성영상 형성 및 디스플레이를 위한 초음파 시스템 |
| JP2007075184A (ja) * | 2005-09-12 | 2007-03-29 | Hitachi Medical Corp | 超音波診断装置 |
| WO2007046272A1 (ja) | 2005-10-19 | 2007-04-26 | Hitachi Medical Corporation | 弾性画像を生成する超音波診断装置 |
| US8075489B2 (en) | 2006-01-24 | 2011-12-13 | National Institute Of Advanced Industrial Science And Technology | Ultrasound diagnostic apparatus |
| JP2007222605A (ja) * | 2006-01-24 | 2007-09-06 | National Institute Of Advanced Industrial & Technology | 超音波診断装置 |
| WO2007086373A1 (ja) * | 2006-01-24 | 2007-08-02 | National Institute Of Advanced Industrial Science And Technology | 超音波診断装置 |
| WO2007116957A1 (ja) * | 2006-04-07 | 2007-10-18 | Hitachi Medical Corporation | 超音波探触子及び超音波診断装置 |
| JP5188959B2 (ja) * | 2006-04-07 | 2013-04-24 | 株式会社日立メディコ | 超音波探触子及び超音波診断装置 |
| WO2007138881A1 (ja) | 2006-05-25 | 2007-12-06 | Hitachi Medical Corporation | 超音波診断装置 |
| JP2008154626A (ja) * | 2006-12-20 | 2008-07-10 | Hitachi Medical Corp | 超音波診断装置 |
| JP2008183097A (ja) * | 2007-01-29 | 2008-08-14 | Aloka Co Ltd | 経食道プローブ及びそれを備えた超音波診断装置 |
| JP2008188180A (ja) * | 2007-02-02 | 2008-08-21 | Hitachi Medical Corp | 超音波診断装置 |
| JP2008301903A (ja) * | 2007-06-05 | 2008-12-18 | Univ Nihon | 2次元的硬さ測定装置 |
| JP2013154217A (ja) * | 2008-04-25 | 2013-08-15 | Hitachi Medical Corp | 超音波診断装置 |
| JP5394372B2 (ja) * | 2008-04-25 | 2014-01-22 | 株式会社日立メディコ | 超音波診断装置 |
| CN104274213A (zh) * | 2008-04-25 | 2015-01-14 | 株式会社日立医疗器械 | 超声波诊断装置 |
| US8845538B2 (en) | 2008-04-25 | 2014-09-30 | Hitachi Medical Corporation | Ultrasonic diagnostic apparatus |
| EP2272435A4 (en) * | 2008-04-25 | 2015-11-04 | Hitachi Medical Corp | DEFORMABLE REFERENCE BODY, ULTRASONIC DIAGNOSTIC AND ULTRASOUND DIAGNOSTIC PROCEDURE |
| US8197411B2 (en) | 2008-04-25 | 2012-06-12 | Hitachi Medical Corporation | Reference deformable body, ultrasonic diagnostic apparatus, and ultrasonic diagnostic method |
| US8747320B2 (en) | 2008-04-25 | 2014-06-10 | Hitachi Medical Corporation | Ultrasonic diagnostic apparatus |
| EP2281508A4 (en) * | 2008-04-25 | 2011-11-23 | Hitachi Medical Corp | ULTRASONIC DIAGNOSTIC DEVICE |
| WO2009131029A1 (ja) | 2008-04-25 | 2009-10-29 | 株式会社 日立メディコ | 超音波診断装置 |
| EP2281508A1 (en) * | 2008-04-25 | 2011-02-09 | Hitachi Medical Corporation | Ultrasonic diagnostic device |
| WO2009131028A1 (ja) * | 2008-04-25 | 2009-10-29 | 株式会社 日立メディコ | 超音波診断装置 |
| WO2009131027A1 (ja) * | 2008-04-25 | 2009-10-29 | 株式会社 日立メディコ | 参照変形体、超音波診断装置及び超音波診断方法 |
| JP5329532B2 (ja) * | 2008-04-25 | 2013-10-30 | 株式会社日立メディコ | 超音波診断装置 |
| JP5329533B2 (ja) * | 2008-04-25 | 2013-10-30 | 株式会社日立メディコ | 超音波診断装置 |
| JP2009268640A (ja) * | 2008-05-02 | 2009-11-19 | Kao Corp | 皮膚内部の弾性計測方法 |
| JP5436533B2 (ja) * | 2009-02-24 | 2014-03-05 | 株式会社日立メディコ | 超音波診断装置及び弾性画像表示方法 |
| US8734353B2 (en) | 2009-02-24 | 2014-05-27 | Hitachi Medical Corporation | Ultrasonic diagnostic apparatus and elastic image display method |
| WO2010098233A1 (ja) * | 2009-02-24 | 2010-09-02 | 株式会社 日立メディコ | 超音波診断装置及び弾性画像表示方法 |
| WO2011129237A1 (ja) * | 2010-04-15 | 2011-10-20 | 株式会社 日立メディコ | 超音波診断装置 |
| EP2595543A4 (en) * | 2010-07-25 | 2017-07-12 | Syneron Medical Ltd. | A method and apparatus for measuring the thickness of adipose tissue |
| JP2012100997A (ja) * | 2010-11-12 | 2012-05-31 | Hitachi Medical Corp | 超音波診断装置及びその作動方法 |
| CN103476344A (zh) * | 2011-04-08 | 2013-12-25 | 佳能株式会社 | 被检体信息获取装置 |
| WO2012137983A1 (en) | 2011-04-08 | 2012-10-11 | Canon Kabushiki Kaisha | Subject information acquisition apparatus |
| US9655589B2 (en) | 2011-04-08 | 2017-05-23 | Canon Kabushiki Kaisha | Subject information acquisition apparatus |
| WO2012161103A1 (en) | 2011-05-26 | 2012-11-29 | Canon Kabushiki Kaisha | Specimen information acquisition apparatus |
| JP2012245105A (ja) * | 2011-05-26 | 2012-12-13 | Canon Inc | 被検体情報取得装置 |
| US10321894B2 (en) | 2011-05-26 | 2019-06-18 | Canon Kabushiki Kaisha | Specimen information acquisition apparatus |
| JP2014176544A (ja) * | 2013-03-15 | 2014-09-25 | Seiko Epson Corp | 超音波測定装置及び超音波画像装置 |
| CN104042235A (zh) * | 2013-03-15 | 2014-09-17 | 精工爱普生株式会社 | 超声波测定装置、超声波图像装置以及测定方法 |
| JP2017012451A (ja) * | 2015-06-30 | 2017-01-19 | キヤノン株式会社 | 被検体支持装置および被検体情報取得装置 |
| KR20200042228A (ko) * | 2018-10-15 | 2020-04-23 | 한국과학기술연구원 | 연조직의 물성을 정량적으로 측정하기 위한 시스템 |
| KR102174348B1 (ko) * | 2018-10-15 | 2020-11-04 | 한국과학기술연구원 | 연조직의 물성을 정량적으로 측정하기 위한 시스템 |
| CN114002331A (zh) * | 2021-11-05 | 2022-02-01 | 湘潭大学 | 一种用于钢绞线受损程度的检测方法 |
| CN114002331B (zh) * | 2021-11-05 | 2024-03-29 | 湘潭大学 | 一种用于钢绞线受损程度的检测方法 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2005066041A (ja) | 超音波探触子及び超音波診断装置 | |
| JP4455003B2 (ja) | 超音波診断装置 | |
| JP4314035B2 (ja) | 超音波診断装置 | |
| WO2010044385A1 (ja) | 超音波診断装置、及び超音波画像表示方法 | |
| US7766832B2 (en) | Ultrasonic diagnostic device and image processing device | |
| JP2005066041A5 (ja) | ||
| JP2009183705A (ja) | 超音波ベースの変位イメージング方法およびコンピュータで読み出し可能な記憶媒体 | |
| JPH05317313A (ja) | 超音波診断装置 | |
| JP5113322B2 (ja) | 超音波診断装置 | |
| WO2017150355A1 (ja) | 超音波診断装置及び超音波情報処理方法 | |
| JP5016911B2 (ja) | 超音波診断装置 | |
| US20200237343A1 (en) | Ultrasound elasticity measuring devices and elasticity comparative measuring methods | |
| JP5415669B2 (ja) | 超音波診断装置 | |
| JP5473527B2 (ja) | 超音波診断装置 | |
| JP2005013283A (ja) | 超音波探触子及び超音波診断装置 | |
| EP2157442B1 (en) | Formation of an elastic image in an ultrasound system | |
| EP2145583B1 (en) | Formation of an elastic image using an ultrasound apparatus and method thereof | |
| JP5225158B2 (ja) | 超音波診断装置 | |
| JP5623609B2 (ja) | 超音波診断装置 | |
| JP5802790B2 (ja) | 超音波診断装置 | |
| JP4368185B2 (ja) | 超音波診断装置 | |
| JP5656389B2 (ja) | 弾性映像に適応的にパーシスタンス処理を施す超音波システム | |
| JP6144990B2 (ja) | 超音波画像撮像装置及び超音波画像撮像方法 | |
| JP5638641B2 (ja) | 超音波診断装置 | |
| JP2013244136A (ja) | 超音波診断装置および超音波診断画像生成方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20060721 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20060721 |
|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20080221 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20090401 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20090925 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20091124 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20100323 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20100507 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20101019 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20110118 |
|
| A911 | Transfer of reconsideration by examiner before appeal (zenchi) |
Free format text: JAPANESE INTERMEDIATE CODE: A911 Effective date: 20110121 |
|
| A912 | Removal of reconsideration by examiner before appeal (zenchi) |
Free format text: JAPANESE INTERMEDIATE CODE: A912 Effective date: 20110617 |