JP2004297902A - アキシャルギャップ型電動機 - Google Patents
アキシャルギャップ型電動機 Download PDFInfo
- Publication number
- JP2004297902A JP2004297902A JP2003086891A JP2003086891A JP2004297902A JP 2004297902 A JP2004297902 A JP 2004297902A JP 2003086891 A JP2003086891 A JP 2003086891A JP 2003086891 A JP2003086891 A JP 2003086891A JP 2004297902 A JP2004297902 A JP 2004297902A
- Authority
- JP
- Japan
- Prior art keywords
- rotor
- electric motor
- back yoke
- axial gap
- gap type
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images


Landscapes
- Permanent Field Magnets Of Synchronous Machinery (AREA)
Abstract
【解決手段】ロータバックヨーク5に固定孔511から外周方向に向けて放射状に補強リブ52a〜52hと、固定孔511から円周方向に沿って環状リブ53を形成して剛性を向上させるとともに、軸方向に沿って貫通する貫通孔56a〜56hを設け、振動箇所の面積を減らして騒音を低減する。
【選択図】 図3
Description
【発明の属する技術分野】
本発明は、出力軸の軸線方向に沿ってロータとステータとが所定の空隙をもって互いに対向配置されているアキシャルギャップ型電動機に関し、さらに詳しくいえば、上記ロータの剛性を向上させて、電動機全体を低振動化、低騒音化する技術に関する。
【0002】
【従来の技術】
アキシャルギャップ型電動機は、円盤状に形成されたステータと、同じく円盤状に形成されたロータとを出力軸の軸方向(アキシャル方向)に沿って所定の空隙をもって互いに対向配置した電動機であり、通常のモータに比べてブラケットを薄型に設計できることから、電動機付き自転車用やFD(フロッピィディスク)ドライブなどの駆動用モータとして好ましく用いられている。
【0003】
通常、この種の電動機におけるロータは、例えば特許文献1に示すように環状に配置された複数個のロータマグネットを円盤状のロータバックヨーク内に埋設した状態で形成されている。これにより、ロータが扁平になり、電動機全体を扁平に保つことができるようになっている。
【0004】
また、一般にこの種の電動機は、ステータ側の極面とロータ側の極面との面間距離が狭ければ狭いほどに回転運動への変換が効率よく行われるため、実際にはその面間距離をサブミクロンオーダーで設計している。
【0005】
【発明が解決しようとする課題】
しかしながら、面間距離を狭くした場合には、次のような問題が生じる。すなわち、この電動機を駆動した場合、ロータには回転モーメントが発生する。したがって、もしロータバックヨークやロータマグネットに微少な偏心や誤差などが生じていると、回転モーメントによって、ロータが変形し、回転にブレ(振れ)が生じるおそれがある。
【0006】
この回転ブレが大きくなると、ロータが振動して、振動音などの騒音発生原因の一因となるばかりでなく、ブレがさらにひどくなった場合には、ロータがステータに接触するおそれもあり、電動機自体の破損にもつながりかねない。
【0007】
そこで、従来では、ステータに設けられた出力軸の軸受部の軸受精度を高精度に設計して、ロータの回転ブレを抑えていた。しかし、軸受精度を高めるためには、高精度なボールベアリングを用いたり、軸受ハウジングを高精度に設計する必要があり、これによる、コストアップは否めなかった。
【0008】
他方において、回転ブレの原因となるロータには、これらの問題を解決するための工夫がなされていないのが現状である。そこで、本発明は上述した現状を鑑みてなされたものであって、その目的は、ロータの剛性を向上させるとともに、電動機全体の低振動化、低騒音化を可能とする技術を提供することにある。
【0009】
【課題を解決するための手段】
上述した目的を達成するため、本発明は、出力軸の軸線方向に沿ってロータとステータとが所定の空隙をもって互いに対向配置されているアキシャルギャップ型電動機において、上記ロータは、上記出力軸の半径方向に沿ってフランジ状に形成され、中心に上記出力軸の固定孔を有するロータバックヨークと、上記ロータバックヨークに一体的に取り付けられるロータマグネットとを含み、上記ロータバックヨークには、上記固定孔から外周方向に向けて放射状に形成される第1補強手段が設けられていることを特徴としている。
【0010】
これによれば、ロータの半径方向の剛性が向上することで、回転モーメントによってロータに生じる変形を抑えることができる。また、ロータの回転には、ロータにかかる遠心力が第1補強手段に集中させることで、ブレや振動を効果的に抑えることができる。
【0011】
より好ましい態様として、上記第1補強手段は、上記ロータマグネットの極間に沿って設けられている。これによれば、隣接するロータマグネットの間に第1補強手段が介在することで、そこにエアギャップが形成されることとなり、極間の磁束変化が和らぎ、コギングトルクが低減される。
【0012】
上記第1補強手段は、上記ステータの対向面側が凹まされ、他方の面が凸とされた補強リブからなる。これによれば、ロータバックヨークの成型時に補強リブをプレス成形などで一体的に成型するだけで、簡単かつ安価に補強手段を組み込むことができる。
【0013】
上記ロータバックヨークにはさらに、上記固定孔を中心に円周方向に沿って環状に形成される第2補強手段が設けられている。これによれば、ロータバックヨークの円周方向の剛性がアップする。
【0014】
より好ましい態様として、上記ロータバックヨークは、上記第2補強手段を挟んで、外周側がロータマグネット配置部、内周側が脆弱部に区画されており、上記第2補強手段の外周に沿って上記ロータマグネットが配置されることが好ましい。これによれば、第2補強手段に沿ってロータマグネットを配置するだけで、簡単にロータマグネットの位置決めを行うことができる。
【0015】
上記第2補強手段は、上記ステータの対向面側が凸とされ、他方の面が凹まされた環状リブからなる。これによれば、バックヨークの成型時に環状リブをプレス成形などで一体的に成型するだけで、簡単かつ安価に補強手段を組み込むことができる。
【0016】
上記脆弱部には、上記ロータバックヨークを軸方向に貫通する貫通孔が形成されており、より好ましくは、上記貫通孔は、上記第1補強手段の間に挟まれた空間に設けられている。これによれば、ロータバックヨーク自体の重量および面積が減少することで、ロータの軽量化が図れるばかりでなく、円周方向の強度が低下することで、回転時にロータにかかる遠心力をより第1補強手段に集中させやすくなり、ブレや振動をさらに効果的に抑えることができる。
【0017】
【発明の実施の形態】
次に、本発明の実施形態について図面を参照しながら説明する。図1は、本発明の一実施形態に係るアキシャルギャップ型電動機の内部構造を概略的に示す断面図である。このアキシャルギャップ型電動機1は、円盤状に形成されたステータ2と、同ステータ2の両側に所定の間隙をもって対向配置される一対のロータ3,3とを備えている。
【0018】
なお、このアキシャルギャップ型電動機1は、ステータ2やロータ3を含む各種機構が実際には図示しないブラケット内に収納されているが、本発明においてブラケットの構成は任意であってよく、図示しないとともにその説明は省略する。
【0019】
ステータ2は、環状に形成されたステータコア21と、ステータコア21の中心に配置される軸受部22とを備え、それらが合成樹脂によって一体的にモールド成型されている。なお、本発明において、ステータ2の具体的な構成は任意であってよく、その説明は省略する。
【0020】
各ロータ3,3同士は、1つの出力軸4を共有して互いに連結されており、出力軸4は、ステータ2の軸受部22によって回転可能に軸支されている。なお、出力軸4の構成(材質や径など)は任意であるため、その説明は省略する。
【0021】
次に、ロータ3,3の具体的な構成について説明するが、この実施形態においてロータ3,3は、実際には両方とも同じ形状であり、それらがステータ2を挟んで左右対称に配置されているため、以下においては、図1において左側のロータ3について説明を行い、他方のロータ3については、同じ参照符号を付すに留める。
【0022】
図1に示すように、ロータ3は、出力軸4を中心に円周方向に沿って円盤状に形成されたロータバックヨーク5と、同ロータバックヨーク5に対して一体的に取り付けられるロータマグネット6とを備えている。
【0023】
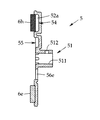
ロータバックヨーク5は、円盤状の金属板をプレス成形したものからなり、中央に出力軸4が固定される軸固定部51が設けられている。軸固定部51は、出力軸4が挿通される軸固定孔511と、外周方向から出力軸4に向けて貫通するネジ孔512とを有し、ネジ孔512からねじ込まれる図示しないネジによって出力軸4にロータ3が固定される。
【0024】
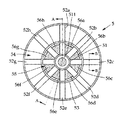
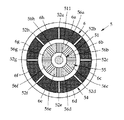
図2は、ロータバックヨーク5を表側(反ステータ側)から見た平面図であり、図3は、ロータバックヨーク5を裏側(ステータ側)から見た平面図である。なお、参考までに図2および図3において軸方向(紙面垂直方向)に貫通する部分には、スマッジング処理を施した。
【0025】
ロータバックヨーク5には、第1補強手段として軸固定部51から外周方向に向かって放射状に延びる複数の補強リブ52a〜52hが、この実施形態では8カ所設けられている。
【0026】
各補強リブ52a〜52hは、それぞれ図5に示すように、ステータの対向面(裏面)側が凹まされ、これに伴い、他方の面(表面)が凸とされた凹凸面からなり、バックヨークの成型時にプレス成形などで一体的に成型されている。
【0027】
この実施形態において、各補強リブ5a〜52hは、正8角形の各対角線に沿って形成されているが、実際には隣接するロータマグネット6の極間に沿って配置されていることが好ましい。したがって、各補強リブ5a〜52hの数は、配置されるロータマグネット6の数(この例では6a〜6hの8個)に応じて任意に設定してよい。
【0028】
これによれば、隣接するロータマグネット6(例えば6aと6b)の極間に補強リブ52bが介在することで、そこにエアギャップが形成されることとなり、極間の磁束変化が和らぎ、コギングトルクが低減される。
【0029】
この実施形態において、補強リブ52a〜52hは、ロータバックヨーク5に一体的に形成された凹凸面からなるが、例えば別に形成しておいた補強リブをロータバックヨーク5に取り付けてもよい。また、これ以外に補強効果が得られるものであれば、適宜選択してよい。
【0030】
また、ロータバックヨーク5には、第2補強手段として軸固定部51を中心に円周方向に沿って環状リブ53が設けられている。環状リブ53は、ステータの対向面(裏側)側が凸とされ、これに伴い、他方の面(表面)が凹まされた凹凸面からなり、バックヨークの成型時にプレス成形などで一体的に成型されている。
【0031】
この環状リブ53を挟んで、ロータバックヨーク5は、外周側がロータマグネット配置部54、内周側が脆弱部55にそれぞれ区画されている。ロータマグネット配置部54には、各ロータマグネット6a〜6hが配置されるが、このとき、各ロータマグネット6a〜6hを環状リブ53の外周に沿って配置することで、簡単に位置決めできる。
【0032】
図2,図3および図4に示すように、脆弱部55には、ロータバックヨーク5を軸方向に沿って貫通する貫通孔56a〜56hが、この実施形態では8カ所設けられている。各貫通孔56a〜56hは、それぞれ補強リブ52a〜52hの間に挟まれるように放射状に形成されている。
【0033】
これによれば、ローターバックヨーク5の表面積および重量が減ることで、回転ブレを抑えることができ、騒音が低減する。また、貫通孔56a〜56hは、補強リブ52a〜52hに影響を与えないので、ロータバックヨーク5の剛性が低下することもない。
【0034】
この実施形態において、貫通孔56a〜56hは、脆弱部55に補強リブ52a〜52hの間に挟まれるように放射状に形成されているが、貫通孔の数および形状は任意であり、補強リブ52a〜52hの形状によっても変化する。
【0035】
図3に示すように、ロータマグネット6は、環状リブ53の外周に沿って環状に配置された1片が扇台形状のマグネットメンバー6a〜6hを含み、隣接するマグネットメンバー6a〜6hの間には、上述した補強リブ52a〜52hによってエアギャップが形成されている。なお、ロータマグネット6の具体的な構成(例えば磁性材料など)は、任意であるため、その説明は省略する。
【0036】
次に、このアキシャルギャップ型電動機1の組立手順の一例について図面を参照しながら説明する。あらかじめプレス成形されたロータバックヨーク5に各マグネットメンバー6a〜6hを取り付ける。
【0037】
各マグネットメンバー6a〜6hを取り付けるに当たっては、各マグネットメンバー6a〜6hを環状リブ53の外周に沿って順々に配置していくことで、簡単に取り付けることができる。各マグネットメンバー6a〜6hの固定手段は任意である。
【0038】
このとき、隣接するマグネットメンバー6a〜6hの間に補強リブ52a〜52hが現れるように配置することで、各マグネットメンバー6a〜6hの間にはエアギャップが形成される。これによれば、磁束変化が和らぎ、コキングトルクを低減することができる。
【0039】
次に、ロータマグネット6が組み込まれたロータ3を出力軸4に固定する。固定するに当たっては、まず、一方のロータ3を先に出力軸4に取り付け、その出力軸4をステータ2の軸受部22に軸支させた後、他方のロータ3を出力軸4に固定することでステータ2を挟んで左右一対にロータ3,3が組み込まれる。
【0040】
なお、この例において、ロータ3,3は、出力軸4に対してネジ孔512よりネジ止めによって固定されているが、これ以外に焼きバメなどによって一体的に固着してもよく、固定手段は任意に選択される。最後に、図示しないブラケットを被せることで、アキシャルギャップ型電動機1が完成する。
【0041】
この実施形態において、ロータ3,3は、ステータ2を挟んで左右一対に設けられているが、ステータ2に対して1つのロータを有するアキシャルギャップ型電動機に本発明のロータバックヨーク構造を適用してもよい。
【0042】
【発明の効果】
以上説明したように、本発明によれば、ロータバックヨークに固定孔から外周方向に向けて放射状に補強リブを形成したことで、ロータの剛性が向上するばかりでなく、補強リブの間にマグネットメンバーを配置したことで、各マグネットメンバーの極間にエアギャップが形成され、これにより、極間の磁束変化が和らぎ、コギングトルクを低減させることができる。
【0043】
また、ロータバックヨークに固定孔から円周方向に沿って環状リブを設けたjことで、円周方向の剛性を向上できるばかりでなく、環状リブに沿ってマグネットメンバーを配置するだけでよく、簡単に位置決めを行うことができる。
【0044】
さらには、ロータバックヨークの一部に、軸方向に沿って貫通する貫通孔を設けたことで、振動箇所の面積が減り、騒音を低減することができる。
【図面の簡単な説明】
【図1】本発明の一実施形態に係るアキシャルギャップ型電動機の内部構造を概略的に示す断面図。
【図2】ロータバックヨークを表側(反ステータ側)から見た正面図。
【図3】ロータバックヨークを裏側(ステータ側)から見た正面図。
【図4】図2のA−A線断面図。
【図5】図2のB−B線断面図。
【符号の説明】
1 アキシャルギャップ型電動機
2 ステータ
3 ロータ
4 出力軸
5 ロータバックヨーク
51 軸固定部
52a〜52h 補強リブ
53 環状リブ
54 ロータマグネット配置部
55 脆弱部
56a〜56h 貫通孔
6 ロータマグネット
6a〜6h マグネットメンバー
Claims (8)
- 出力軸の軸線方向に沿ってロータとステータとが所定の空隙をもって互いに対向配置されているアキシャルギャップ型電動機において、
上記ロータは、上記出力軸の半径方向に沿ってフランジ状に形成され、中心に上記出力軸の固定孔を有するロータバックヨークと、上記ロータバックヨークに一体的に取り付けられるロータマグネットとを含み、
上記ロータバックヨークには、上記固定孔から外周方向に向けて放射状に形成される第1補強手段が設けられていることを特徴とするアキシャルギャップ型電動機。 - 上記第1補強手段は、上記ロータマグネットの極間に沿って設けられている請求項1に記載のアキシャルギャップ型電動機。
- 上記第1補強手段は、上記ステータの対向面側が凹まされ、他方の面が凸とされた補強リブからなる請求項1または2に記載のアキシャルギャップ型電動機。
- 上記ロータバックヨークにはさらに、上記固定孔を中心に円周方向に沿って環状に形成される第2補強手段が設けられている請求項1,2または3に記載のアキシャルギャップ型電動機。
- 上記ロータバックヨークは、上記第2補強手段を挟んで、外周側がロータマグネット配置部、内周側が脆弱部に区画されており、上記第2補強手段の外周に沿って上記ロータマグネットが配置される請求項4に記載のアキシャルギャップ型電動機。
- 上記第2補強手段は、上記ステータの対向面側が凸とされ、他方の面が凹まされた環状リブからなる請求項4または5に記載のアキシャルギャップ型電動機。
- 上記脆弱部には、上記ロータバックヨークを軸方向に貫通する貫通孔が形成されている請求項5または6に記載のアキシャルギャップ型電動機。
- 上記貫通孔は、上記第1補強手段の間に挟まれた空間に設けられている請求項7に記載のアキシャルギャップ型電動機。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2003086891A JP4288470B2 (ja) | 2003-03-27 | 2003-03-27 | アキシャルギャップ型電動機 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2003086891A JP4288470B2 (ja) | 2003-03-27 | 2003-03-27 | アキシャルギャップ型電動機 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2004297902A true JP2004297902A (ja) | 2004-10-21 |
| JP4288470B2 JP4288470B2 (ja) | 2009-07-01 |
Family
ID=33401398
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2003086891A Expired - Fee Related JP4288470B2 (ja) | 2003-03-27 | 2003-03-27 | アキシャルギャップ型電動機 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4288470B2 (ja) |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2008086115A (ja) * | 2006-09-27 | 2008-04-10 | Daikin Ind Ltd | コア、電機子、アキシャルギャップ型モータ、圧縮機、コアの製造方法、及び電機子の製造方法 |
| US7579744B2 (en) | 2004-12-14 | 2009-08-25 | Nissan Motor Co., Ltd. | Rotor structure of an axial gap rotating electrical device |
| JP2011247774A (ja) * | 2010-05-27 | 2011-12-08 | Tamagawa Seiki Co Ltd | 回転角検出又は回転同期装置 |
| JP2016067192A (ja) * | 2014-09-17 | 2016-04-28 | 日本電産株式会社 | モータ |
| WO2023228665A1 (ja) * | 2022-05-24 | 2023-11-30 | 株式会社デンソー | アキシャルギャップ型回転電機およびその製造方法 |
-
2003
- 2003-03-27 JP JP2003086891A patent/JP4288470B2/ja not_active Expired - Fee Related
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US7579744B2 (en) | 2004-12-14 | 2009-08-25 | Nissan Motor Co., Ltd. | Rotor structure of an axial gap rotating electrical device |
| JP2008086115A (ja) * | 2006-09-27 | 2008-04-10 | Daikin Ind Ltd | コア、電機子、アキシャルギャップ型モータ、圧縮機、コアの製造方法、及び電機子の製造方法 |
| JP2011247774A (ja) * | 2010-05-27 | 2011-12-08 | Tamagawa Seiki Co Ltd | 回転角検出又は回転同期装置 |
| JP2016067192A (ja) * | 2014-09-17 | 2016-04-28 | 日本電産株式会社 | モータ |
| WO2023228665A1 (ja) * | 2022-05-24 | 2023-11-30 | 株式会社デンソー | アキシャルギャップ型回転電機およびその製造方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP4288470B2 (ja) | 2009-07-01 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US7187098B2 (en) | Axial gap rotating electrical machine | |
| JP4529500B2 (ja) | アキシャルギャップ回転電機 | |
| US20120194024A1 (en) | Brushless dc motor | |
| JP2005185075A (ja) | アキシャルギャップ型電動機 | |
| JP5685506B2 (ja) | 回転電機の回転子、回転電機および回転子の端面部材 | |
| JPWO2015059768A1 (ja) | 回転電機用ロータ | |
| JP2006304539A (ja) | アキシャルギャップ型回転電機のロータ構造 | |
| JP2008236960A (ja) | 電動機の回転子及び電動機及び空気調和機及び電動機の回転子の製造方法 | |
| US10840762B2 (en) | Brushless motor and electric bicycle provided with the same | |
| JP2005261022A (ja) | アキシャルギャップ回転電機 | |
| JP2004297902A (ja) | アキシャルギャップ型電動機 | |
| JPH0984283A (ja) | ロータに対するロータ用磁石の配設構造 | |
| JP2004312984A (ja) | アキシャルギャップ型電動機 | |
| JP3684341B2 (ja) | 永久磁石式回転電機 | |
| JP2018133948A (ja) | モータ | |
| JPH0731088A (ja) | 合成樹脂モールド構造を有する回転子構造 | |
| JP2001211581A (ja) | ブラシレスdcモータ | |
| JP5017045B2 (ja) | アキシャルギャップ型モータ | |
| JP4706854B2 (ja) | アキシャルエアギャップ型電動機 | |
| JP2004215397A (ja) | ステッピングモータ | |
| JP2000069727A (ja) | モータのロータ | |
| JP2000069735A (ja) | アウターロータ型ブラシレス電動機 | |
| JP2005051940A (ja) | アキシャルギャップ型電動機 | |
| JP2006288081A (ja) | アキシャルギャップ型電動機 | |
| JP2002078308A (ja) | プリントモータ |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20051130 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20081210 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20090209 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20090304 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20090317 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120410 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130410 Year of fee payment: 4 |
|
| LAPS | Cancellation because of no payment of annual fees |