JP2004257979A - Navigation apparatus - Google Patents
Navigation apparatus Download PDFInfo
- Publication number
- JP2004257979A JP2004257979A JP2003051512A JP2003051512A JP2004257979A JP 2004257979 A JP2004257979 A JP 2004257979A JP 2003051512 A JP2003051512 A JP 2003051512A JP 2003051512 A JP2003051512 A JP 2003051512A JP 2004257979 A JP2004257979 A JP 2004257979A
- Authority
- JP
- Japan
- Prior art keywords
- route
- current position
- image
- map
- intersection
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images



Landscapes
- Instructional Devices (AREA)
- Navigation (AREA)
- Traffic Control Systems (AREA)
Abstract
Description
【0001】
【発明の属する技術分野】
本発明は、現在位置を表示する地図表示機能と、その地図上の所定の位置で撮影した風景画像の表示機能とを備えたナビゲーション装置に関する。
【0002】
【従来の技術】
従来、ナビゲーション装置では、車両の位置を検出して光ディスク等の記憶媒体から適当な尺度の車両位置周辺の地図データを読み出し、表示装置に地図画像を描画して表示すると共に、車両位置マークを地図画像に重ねて描画して表示する。そして、車両の移動に伴い、画面の車両位置マークを移動したり、或いは車両位置マークは画面中央等に固定して地図をスクロールしたりして、常に車両位置周辺の地図情報が一目で判るようになっている。
【0003】
ところで、ナビゲーション装置には走行予定経路上の走行予定交差点に一定距離内に近づいたとき、地図データを参照してその案内対象交差点の交差点形状を含む交差点案内画像(以下、交差点拡大図と呼ぶ)を光ディスク等の記憶媒体より読み出して表示装置の一部に描画するとともに、交差点案内画像中に交差点形状図形の中心から交差点形状図形での交差点脱出方向に延長させた矢印による走行方向案内図形を描画し、交差点で運転者がどの方向に進めば良いか判るようにしたものがある。
【0004】
そして、運転者が交差点形状を認識し易くするため、平面図形(2次元図形)の地図画像の他に鳥瞰図形(3次元図形)で交差点拡大図を描画するようにしたものがある。運転者は表示装置に描画された交差点形状を認識する際、この描画された交差点形状を肉視される実際の交差点形状に置換えて判断しなければならない。しかしながら、実際の風景は建物等があり、表示装置に描画された交差点形状を現実の風景内の情報として素早く認識するためには、地図画像をできるだけリアルに3次元表示することが望ましい。
【0005】
そこで、交差点等においては3次元地図の尺度を拡大し、道路や建物などをできるだけ現実の風景に類似させることで、運転者が容易に認識できるようにしたものがある。
【0006】
【発明が解決しようとする課題】
しかしながら、全ての交差点について地図画像中の全ての建物等の立体形状を記憶させることは地図画像のデータ量が多くなり、大容量の記憶媒体が必要であるといった問題があった。
【0007】
本発明は、上記の問題点に鑑み、大容量の記憶媒体を必要とせずとも運転者が容易に交差点等での進行方向を認識できるナビゲーション装置を提供することにある。
【0008】
【課題を解決するための手段】
上記目的を達成するために、本発明に係るナビゲーション装置においては、進行方向の風景を撮像する撮像手段と、該撮像手段によって撮像された画像を表示する表示手段と、現在位置を検出する現在位置検出手段と、経路検索用に道路の接続関係を示す経路計算用地図情報が記憶された記憶手段と、該記憶手段から前記経路計算用地図情報を読み出して現在位置から目的地まの経路検索する経路検索手段と、該経路検出手段が検出した経路上の分岐点と前記現在位置検出手段が検出した現在位置とが所定距離以下になると、前記撮像手段が撮像した画像に前記分岐点での進むべき方向を案内する画像を重畳し前記表示手段に表示する。
【0009】
【発明の実施の形態】
本発明の実施の形態を図に基づき説明する。
【0010】
図1は実施の形態の要部の構成を示すブロック図である。(1)はマイクロコンピュータ等で構成された制御回路であり、ROM(2)に書き込まれたプログラムに基づいてナビゲーション装置全体を制御する。GPS(Global Positioning System)測位手段(3)はGPS衛星からの電波を受信して現在位置を測定し、測定データを制御回路(1)に出力する。(4)は地図再生部であり、地図情報が書き込まれた光ディスクより地図情報を読み取り、制御回路(1)に出力する。なお光ディスクに記憶されている地図情報には、自車位置や進路経路等の算出を行うための経路計算用地図と、後述する表示部(6)に表示するための地図画像を描画するための描画用地図とがあり、経路計算用地図中の所定点には、交差点や踏切等の属性を示す情報が記憶されている。(5)は自動車の前方等に取り付けられ進行方向の風景を撮像するカメラである。表示部(6)は液晶のモニターであり、地図や現在位置やカメラ(5)で撮像した風景を制御回路(1)の制御に基づき表示する。(7)はRAMであり、制御回路(1)の動作に必要な情報を記憶する。
【0011】
次に、本発明の実施の形態の動作を説明する。
【0012】
図2は制御回路(1)の動作を示すフローチャートである。
【0013】
ナビゲーション装置の電源が投入されると、GPS受信部(3)はGPS衛星からの信号に基づいて現在位置を算出してその結果を制御回路(1)へ出力する。制御回路(1)は、現在位置と入力手段(図示せず)を介して運転者によって入力された目的地までの走行予定経路を地図再生部より読み出してRAM(7)に記憶した経路計算用地図を用いて算出しその走行予定経路とを地図再生部(4)より読み出した描画用地図に重畳して表示部(6)に表示する(ステップS1)。表示する地図は平面図形または鳥瞰図形のいずれでもよく、運転者の好みに応じて選択できるようにしておくことが望ましい。
【0014】
そして、ナビゲーション装置の移動に伴い、RAM(7)に記憶されている経路計算用地図を参照して現在位置と走行予定経路上にある現在位置から最も近い交差点までの距離を監視し、その距離が所定距離(例えば50m)以下になったか否かを判断する(ステップS2)。現在位置と最も近い交差点までの距離が所定距離以下になると(ステップS2のY)、カメラ(5)を起動し前方の風景を撮像させる(ステップS3)。そして撮像された画像を背景画像としてその交差点での進行方向を示す矢印を重畳し表示部(6)に表示する(ステップS4)。なお、背景画像の表示は表示部(6)の一部に描画用地図に重畳して表示してもよいし、表示部(6)全体に表示するようにしてもよい。なお、カメラ(5)によって撮像された画像に進行方向を示す矢印を重畳する方法については後述する。
【0015】
そして現時位置が交差点を通過したと判断すると、カメラ(5)を停止させ、前方の風景画像を表示部(6)から消去する(ステップS6)。
【0016】
以上のステップS1からステップS2を繰り返し出発地から目的地までの経路案内を行う。
【0017】
なお、上述した実施例では交差点までの距離が所定距離以下になったときカメラを起動し撮像さた風景を表示部に表示するようにしたが、カメラは常に起動して風景を撮像させておいて、交差点までの距離が所定距離以下になったとき表示部に表示させるようにしてもよい。
【0018】
次に、カメラ(5)で撮像した画像に進行方向を示す矢印を重畳する方法について説明する。
【0019】
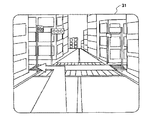
制御回路(1)はカメラ(5)が撮像した画像(31)(図3参照)中から走行中の道路部(32)を認識し、その道路部(32)中における上下方向の高さ位置Hに基づいて、現在位置から道路部(32)中の各位置までの実際の距離を算出することによって、画像(31)中に進行方向等を重畳する機能を有している。
【0020】
画像(31)中から道路部(32)の認識は、画像(31)中の道路や建物等の各画像要素の輪郭抽出を行う。そして、その抽出された画像(31)の中央部を上下方向に延びる道路の左右両側の輪郭(33)を検出することによって行われる。なお、道路部(32)の認識は道路のセンターライン(34)を検出することによって行なってもよいし、輪郭(33)とセンターライン(34)の検出結果を組み合わせることで走行している車線も検出できるようにしてもよい。
【0021】
道路部(32)の各部の画像(31)における高さ位置Hと実際の距離との関係は、道路部(32)中の各部は、現在位置からその各部が対応する道路中の各位置までの距離が遠いほど画像(31)中の上方に位置するようになっており、この画像(32)上での高さ位置Hと実際の距離との関係を予めROM(2)に記憶させておくことによって、道路部(32)中の各部が対応する道路中の各位置までの距離が認識できるようになっている。そして、経路計算用地図を参照してGPS受信部(3)によって検出された現在位置から交差点までの距離算出し、その算出された距離を用いて画像(31)中のどの位置が交差点であるかが判るようになっている。そして、制御回路(1)は制御回路(1)によって算出された走行予定経路にしたがって画像(31)中の交差点上に進むべき方向を示す矢印を画像(31)に重畳し表示部(6)に表示する(図4参照)。
【0022】
【発明の効果】
本発明によると、実際の画像に進むべき方向を示す矢印を重畳し表示するので、詳細な線画用地図を用いなくても運転者は交差点での進行方向を感覚的に把握できるので、線画用地図を記憶する記憶媒体の記憶容量が少なくできる。
【図面の簡単な説明】
【図1】本発明のナビゲーション装置の要部の構成を示すブロック図である。
【図2】本発明のナビゲーション装置の制御回路の動作を示すフローチャートである。
【図3】カメラによって撮像された画像を示す図である。
【図4】カメラによって撮像された画像に進行方向を占める矢印を重畳した状態を示す図である。
【符号の説明】
1 制御回路
2 ROM
3 GPS受信部
4 地図再生手段
5 カメラ
6 表示部
7 RAM[0001]
TECHNICAL FIELD OF THE INVENTION
The present invention relates to a navigation device having a map display function of displaying a current position and a display function of a landscape image captured at a predetermined position on the map.
[0002]
[Prior art]
Conventionally, a navigation device detects the position of a vehicle, reads out map data around the vehicle position on an appropriate scale from a storage medium such as an optical disk, draws and displays a map image on a display device, and displays a vehicle position mark on a map. Draw and display on the image. Then, with the movement of the vehicle, the vehicle position mark on the screen is moved, or the vehicle position mark is fixed at the center of the screen or the like and the map is scrolled, so that the map information around the vehicle position can always be understood at a glance. It has become.
[0003]
By the way, when the navigation apparatus approaches a planned intersection on a planned route within a certain distance, an intersection guidance image including an intersection shape of the guidance target intersection by referring to map data (hereinafter referred to as an enlarged view of the intersection). Is read from a storage medium such as an optical disk, and is drawn on a part of the display device, and in the intersection guide image, a travel direction guide graphic is drawn by an arrow extending from the center of the intersection shape graphic in an intersection escape direction at the intersection shape graphic. In some cases, a driver can know which direction to proceed at an intersection.
[0004]
In order to make it easier for the driver to recognize the shape of the intersection, there is an example in which an enlarged intersection diagram is drawn with a bird's-eye view graphic (three-dimensional graphic) in addition to a map image of a planar graphic (two-dimensional graphic). When recognizing the intersection shape drawn on the display device, the driver must replace the drawn intersection shape with the actual intersection shape that is visually recognized. However, the actual landscape includes buildings and the like, and in order to quickly recognize the intersection shape drawn on the display device as information in the actual landscape, it is desirable to display the map image three-dimensionally as realistically as possible.
[0005]
Therefore, there is an intersection or the like in which the scale of a three-dimensional map is enlarged so that roads, buildings, and the like are made as close as possible to a real scene so that the driver can easily recognize the scale.
[0006]
[Problems to be solved by the invention]
However, storing the three-dimensional shapes of all the buildings and the like in the map image for all the intersections has a problem that the data amount of the map image increases and a large-capacity storage medium is required.
[0007]
SUMMARY OF THE INVENTION The present invention has been made in view of the above circumstances, and provides a navigation device that allows a driver to easily recognize a traveling direction at an intersection or the like without requiring a large-capacity storage medium.
[0008]
[Means for Solving the Problems]
In order to achieve the above object, in a navigation device according to the present invention, an imaging unit for imaging a scenery in a traveling direction, a display unit for displaying an image captured by the imaging unit, and a current position for detecting a current position Detecting means, storage means for storing route calculation map information indicating connection relation of roads for route search, and reading the route calculation map information from the storage means to search for a route from a current position to a destination. A route search unit that, when a branch point on the route detected by the route detection unit and a current position detected by the current position detection unit are equal to or less than a predetermined distance, advances to an image captured by the imaging unit at the branch point; An image for guiding the power direction is superimposed and displayed on the display means.
[0009]
BEST MODE FOR CARRYING OUT THE INVENTION
An embodiment of the present invention will be described with reference to the drawings.
[0010]
FIG. 1 is a block diagram showing a configuration of a main part of the embodiment. (1) is a control circuit constituted by a microcomputer or the like, and controls the entire navigation device based on a program written in the ROM (2). A GPS (Global Positioning System) positioning means (3) receives a radio wave from a GPS satellite, measures a current position, and outputs measurement data to a control circuit (1). (4) a map reproducing unit which reads map information from the optical disk on which the map information is written, and outputs the map information to the control circuit (1). The map information stored in the optical disc includes a route calculation map for calculating the own vehicle position and the route, and a map image for displaying a map image to be displayed on a display unit (6) described later. There is a drawing map, and at a predetermined point in the route calculation map, information indicating an attribute such as an intersection or a railroad crossing is stored. (5) is a camera which is attached to the front of a car or the like and captures scenery in the traveling direction. The display unit (6) is a liquid crystal monitor, and displays a map, a current position, and a scene captured by the camera (5) under the control of the control circuit (1). (7) is a RAM for storing information necessary for the operation of the control circuit (1).
[0011]
Next, the operation of the embodiment of the present invention will be described.
[0012]
FIG. 2 is a flowchart showing the operation of the control circuit (1).
[0013]
When the power of the navigation device is turned on, the GPS receiver (3) calculates a current position based on a signal from a GPS satellite and outputs the result to the control circuit (1). The control circuit (1) reads a current position and a planned traveling route to the destination input by the driver via input means (not shown) from the map reproducing unit and stores the read route in the RAM (7). The calculated travel route is calculated using the map and is superimposed on the drawing map read from the map reproducing unit (4) and displayed on the display unit (6) (step S1). The map to be displayed may be either a plane figure or a bird's-eye figure, and it is desirable that the map can be selected according to the driver's preference.
[0014]
With the movement of the navigation device, the current position and the distance from the current position on the planned route to the nearest intersection are monitored with reference to the route calculation map stored in the RAM (7). Is smaller than or equal to a predetermined distance (for example, 50 m) (step S2). When the distance to the nearest intersection to the current position becomes equal to or less than the predetermined distance (Y in step S2), the camera (5) is activated to capture an image of the scenery ahead (step S3). Then, the captured image is used as a background image and an arrow indicating the traveling direction at the intersection is superimposed and displayed on the display unit (6) (step S4). The background image may be displayed on a part of the display unit (6) so as to be superimposed on the map for drawing, or may be displayed on the entire display unit (6). A method of superimposing an arrow indicating a traveling direction on an image captured by the camera (5) will be described later.
[0015]
When it is determined that the current position has passed the intersection, the camera (5) is stopped, and the scenery image in front is deleted from the display unit (6) (step S6).
[0016]
The above steps S1 and S2 are repeated to provide route guidance from the departure place to the destination.
[0017]
In the above-described embodiment, the camera is activated when the distance to the intersection becomes equal to or less than the predetermined distance, and the captured scene is displayed on the display unit. However, the camera is always activated to capture the landscape. Then, when the distance to the intersection becomes equal to or less than a predetermined distance, the information may be displayed on the display unit.
[0018]
Next, a method of superimposing an arrow indicating a traveling direction on an image captured by the camera (5) will be described.
[0019]
The control circuit (1) recognizes the traveling road section (32) from the image (31) (see FIG. 3) captured by the camera (5), and the vertical position in the road section (32). It has a function of superposing the traveling direction and the like in the image (31) by calculating the actual distance from the current position to each position in the road section (32) based on H.
[0020]
In recognition of the road portion (32) from the image (31), the contour of each image element such as a road and a building in the image (31) is extracted. The detection is performed by detecting the contours (33) on both the left and right sides of the road extending vertically in the center of the extracted image (31). The recognition of the road portion (32) may be performed by detecting the center line (34) of the road, or the lane that is traveling by combining the detection result of the contour (33) and the center line (34). May be detected.
[0021]
The relationship between the height position H of each part of the road section (32) in the image (31) and the actual distance is as follows: each section in the road section (32) is from the current position to each position on the road to which the corresponding section corresponds. The longer the distance is, the higher it is located in the image (31). The relationship between the height position H on the image (32) and the actual distance is stored in the ROM (2) in advance. By doing so, the distance to each position on the road corresponding to each part in the road part (32) can be recognized. Then, the distance from the current position detected by the GPS receiving unit (3) to the intersection is calculated with reference to the route calculation map, and the position in the image (31) is the intersection using the calculated distance. You can see it. Then, the control circuit (1) superimposes on the image (31) an arrow indicating a direction to go on the intersection in the image (31) according to the scheduled traveling route calculated by the control circuit (1), and displays the arrow on the image (31). (See FIG. 4).
[0022]
【The invention's effect】
According to the present invention, since the arrow indicating the direction to go to the actual image is superimposed and displayed, the driver can intuitively grasp the traveling direction at the intersection without using a detailed line drawing map. The storage capacity of the storage medium for storing the map can be reduced.
[Brief description of the drawings]
FIG. 1 is a block diagram showing a configuration of a main part of a navigation device according to the present invention.
FIG. 2 is a flowchart showing an operation of a control circuit of the navigation device of the present invention.
FIG. 3 is a diagram showing an image captured by a camera.
FIG. 4 is a diagram showing a state in which an arrow occupying a traveling direction is superimposed on an image captured by a camera.
[Explanation of symbols]
1
3
Claims (1)
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2003051512A JP2004257979A (en) | 2003-02-27 | 2003-02-27 | Navigation apparatus |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2003051512A JP2004257979A (en) | 2003-02-27 | 2003-02-27 | Navigation apparatus |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2004257979A true JP2004257979A (en) | 2004-09-16 |
Family
ID=33116637
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2003051512A Pending JP2004257979A (en) | 2003-02-27 | 2003-02-27 | Navigation apparatus |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2004257979A (en) |
Cited By (20)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2006151215A (en) * | 2004-11-30 | 2006-06-15 | Nippon Seiki Co Ltd | Display device for vehicle |
| GB2421653A (en) * | 2004-12-24 | 2006-06-28 | Trek Wireless Ltd | System for the collection and association of image and position data |
| JP2007040844A (en) * | 2005-08-03 | 2007-02-15 | Mitsubishi Electric Corp | On-vehicle navigation device |
| WO2007037126A1 (en) * | 2005-09-29 | 2007-04-05 | Matsushita Electric Industrial Co., Ltd. | Navigation device, navigation method, and vehicle |
| WO2007101744A1 (en) | 2006-03-07 | 2007-09-13 | Robert Bosch Gmbh | Method and system for displaying navigation instructions |
| WO2007101755A1 (en) * | 2006-03-07 | 2007-09-13 | Robert Bosch Gmbh | Method and system for displaying navigation instructions |
| JP2008039642A (en) * | 2006-08-08 | 2008-02-21 | Denso Corp | Navigation device, and image generation method and program |
| WO2008044309A1 (en) | 2006-10-13 | 2008-04-17 | Navitime Japan Co., Ltd. | Navigation system, mobile terminal device, and route guiding method |
| WO2008068849A1 (en) | 2006-12-05 | 2008-06-12 | Navitime Japan Co., Ltd. | Navigation system, portable terminal device, and peripheral-image display method |
| DE102007042967A1 (en) * | 2007-09-10 | 2009-03-12 | Continental Automotive Gmbh | Route guidance device and method for route guidance |
| WO2009095967A1 (en) * | 2008-01-31 | 2009-08-06 | Mitsubishi Electric Corporation | Navigation device |
| US7733244B2 (en) | 2006-03-30 | 2010-06-08 | Denso Corporation | Navigation system |
| CN102314315A (en) * | 2010-07-09 | 2012-01-11 | 株式会社东芝 | Display device, image data generating device, image data generation program and display packing |
| US8180567B2 (en) * | 2005-06-06 | 2012-05-15 | Tomtom International B.V. | Navigation device with camera-info |
| KR101147748B1 (en) | 2005-05-26 | 2012-05-25 | 엘지전자 주식회사 | A mobile telecommunication device having a geographic information providing function and the method thereof |
| US20120185165A1 (en) * | 2008-08-19 | 2012-07-19 | Tomtom International B.V. | Navigation device with camera-info |
| JP2015049221A (en) * | 2013-09-04 | 2015-03-16 | アイシン・エィ・ダブリュ株式会社 | Route guide display system, method, and program |
| CN105654778A (en) * | 2014-12-01 | 2016-06-08 | 星克跃尔株式会社 | Electronic apparatus and control method thereof |
| US10386199B2 (en) | 2012-10-30 | 2019-08-20 | Thinkware Systems Corporation | Navigation guidance apparatus and method using wide-angle lens camera image |
| US10497178B2 (en) | 2014-12-01 | 2019-12-03 | Thinkware Corporation | Electronic apparatus, control method thereof, computer program, and computer-readable recording medium |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH09113291A (en) * | 1995-10-19 | 1997-05-02 | Toshiba Corp | Map displaying and processing device |
| JPH10132598A (en) * | 1996-10-31 | 1998-05-22 | Sony Corp | Navigating method, navigation device and automobile |
| JPH10281794A (en) * | 1997-04-03 | 1998-10-23 | Toyota Motor Corp | Guidance display device for vehicle |
| JPH1123305A (en) * | 1997-07-03 | 1999-01-29 | Toyota Motor Corp | Running guide apparatus for vehicle |
| JP2000155895A (en) * | 1998-11-24 | 2000-06-06 | Sony Corp | Navigation device |
-
2003
- 2003-02-27 JP JP2003051512A patent/JP2004257979A/en active Pending
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH09113291A (en) * | 1995-10-19 | 1997-05-02 | Toshiba Corp | Map displaying and processing device |
| JPH10132598A (en) * | 1996-10-31 | 1998-05-22 | Sony Corp | Navigating method, navigation device and automobile |
| JPH10281794A (en) * | 1997-04-03 | 1998-10-23 | Toyota Motor Corp | Guidance display device for vehicle |
| JPH1123305A (en) * | 1997-07-03 | 1999-01-29 | Toyota Motor Corp | Running guide apparatus for vehicle |
| JP2000155895A (en) * | 1998-11-24 | 2000-06-06 | Sony Corp | Navigation device |
Cited By (26)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2006151215A (en) * | 2004-11-30 | 2006-06-15 | Nippon Seiki Co Ltd | Display device for vehicle |
| GB2421653A (en) * | 2004-12-24 | 2006-06-28 | Trek Wireless Ltd | System for the collection and association of image and position data |
| KR101147748B1 (en) | 2005-05-26 | 2012-05-25 | 엘지전자 주식회사 | A mobile telecommunication device having a geographic information providing function and the method thereof |
| US8352180B2 (en) | 2005-06-06 | 2013-01-08 | Tomtom International B.V. | Device with camera-info |
| US8180567B2 (en) * | 2005-06-06 | 2012-05-15 | Tomtom International B.V. | Navigation device with camera-info |
| JP4737523B2 (en) * | 2005-08-03 | 2011-08-03 | 三菱電機株式会社 | Car navigation system |
| JP2007040844A (en) * | 2005-08-03 | 2007-02-15 | Mitsubishi Electric Corp | On-vehicle navigation device |
| WO2007037126A1 (en) * | 2005-09-29 | 2007-04-05 | Matsushita Electric Industrial Co., Ltd. | Navigation device, navigation method, and vehicle |
| WO2007101755A1 (en) * | 2006-03-07 | 2007-09-13 | Robert Bosch Gmbh | Method and system for displaying navigation instructions |
| US9791288B2 (en) | 2006-03-07 | 2017-10-17 | Robert Bosch Gmbh | Method and system for displaying navigation instructions |
| WO2007101744A1 (en) | 2006-03-07 | 2007-09-13 | Robert Bosch Gmbh | Method and system for displaying navigation instructions |
| US7733244B2 (en) | 2006-03-30 | 2010-06-08 | Denso Corporation | Navigation system |
| JP2008039642A (en) * | 2006-08-08 | 2008-02-21 | Denso Corp | Navigation device, and image generation method and program |
| WO2008044309A1 (en) | 2006-10-13 | 2008-04-17 | Navitime Japan Co., Ltd. | Navigation system, mobile terminal device, and route guiding method |
| WO2008068849A1 (en) | 2006-12-05 | 2008-06-12 | Navitime Japan Co., Ltd. | Navigation system, portable terminal device, and peripheral-image display method |
| DE102007042967A1 (en) * | 2007-09-10 | 2009-03-12 | Continental Automotive Gmbh | Route guidance device and method for route guidance |
| WO2009095967A1 (en) * | 2008-01-31 | 2009-08-06 | Mitsubishi Electric Corporation | Navigation device |
| JP4741023B2 (en) * | 2008-01-31 | 2011-08-03 | 三菱電機株式会社 | Navigation device |
| US20120185165A1 (en) * | 2008-08-19 | 2012-07-19 | Tomtom International B.V. | Navigation device with camera-info |
| US8423292B2 (en) * | 2008-08-19 | 2013-04-16 | Tomtom International B.V. | Navigation device with camera-info |
| CN102314315A (en) * | 2010-07-09 | 2012-01-11 | 株式会社东芝 | Display device, image data generating device, image data generation program and display packing |
| US10386199B2 (en) | 2012-10-30 | 2019-08-20 | Thinkware Systems Corporation | Navigation guidance apparatus and method using wide-angle lens camera image |
| JP2015049221A (en) * | 2013-09-04 | 2015-03-16 | アイシン・エィ・ダブリュ株式会社 | Route guide display system, method, and program |
| CN105654778A (en) * | 2014-12-01 | 2016-06-08 | 星克跃尔株式会社 | Electronic apparatus and control method thereof |
| US10497178B2 (en) | 2014-12-01 | 2019-12-03 | Thinkware Corporation | Electronic apparatus, control method thereof, computer program, and computer-readable recording medium |
| US11030816B2 (en) | 2014-12-01 | 2021-06-08 | Thinkware Corporation | Electronic apparatus, control method thereof, computer program, and computer-readable recording medium |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2004257979A (en) | Navigation apparatus | |
| EP2241859B1 (en) | Improved vehicle navigation system | |
| JP3908419B2 (en) | Navigation device | |
| JP4562471B2 (en) | Navigation device and traveling direction guide method | |
| JP4293917B2 (en) | Navigation device and intersection guide method | |
| JP3958133B2 (en) | Vehicle position measuring apparatus and method | |
| JP4370869B2 (en) | Map data updating method and map data updating apparatus | |
| US20080195315A1 (en) | Movable-Body Navigation Information Display Method and Movable-Body Navigation Information Display Unit | |
| EP1072863A2 (en) | Image processing apparatus for navigation system | |
| CN101467005A (en) | Navigation device and navigation method | |
| JP2008064517A (en) | Navigation device and drawing method of crossing guide map | |
| JP2009020089A (en) | System, method, and program for navigation | |
| JP2008139295A (en) | Device and method for intersection guide in vehicle navigation using camera | |
| JP2011149835A (en) | Car navigation device | |
| JP4339178B2 (en) | Parking space empty space guidance device and parking space empty space guidance method | |
| JPH10132598A (en) | Navigating method, navigation device and automobile | |
| JP4797849B2 (en) | Driving support image display system and in-vehicle device | |
| JP2004245610A (en) | System and method for analyzing passing of vehicle coming from opposite direction, and navigation device | |
| JP2009184648A (en) | Driving support device, driving support method and program | |
| JP2007206014A (en) | Navigation device | |
| JP2003337040A (en) | Method for displaying three-dimensional map | |
| JP4800252B2 (en) | In-vehicle device and traffic information presentation method | |
| JP2005196376A (en) | Device for displaying surrounding vehicle, navigation system, and method for displaying vehicle | |
| CN102200444B (en) | Real-time augmented reality device and method thereof | |
| JP3619076B2 (en) | Navigation device |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A711 | Notification of change in applicant |
Free format text: JAPANESE INTERMEDIATE CODE: A712 Effective date: 20041020 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20050901 |
|
| RD01 | Notification of change of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7421 Effective date: 20051227 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20070731 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20071204 |