JP2004203365A - Parking supporting device - Google Patents
Parking supporting device Download PDFInfo
- Publication number
- JP2004203365A JP2004203365A JP2003077449A JP2003077449A JP2004203365A JP 2004203365 A JP2004203365 A JP 2004203365A JP 2003077449 A JP2003077449 A JP 2003077449A JP 2003077449 A JP2003077449 A JP 2003077449A JP 2004203365 A JP2004203365 A JP 2004203365A
- Authority
- JP
- Japan
- Prior art keywords
- vehicle
- parking
- parallel
- line
- steering
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images



















Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60R—VEHICLES, VEHICLE FITTINGS, OR VEHICLE PARTS, NOT OTHERWISE PROVIDED FOR
- B60R1/00—Optical viewing arrangements; Real-time viewing arrangements for drivers or passengers using optical image capturing systems, e.g. cameras or video systems specially adapted for use in or on vehicles
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N7/00—Television systems
- H04N7/18—Closed-circuit television [CCTV] systems, i.e. systems in which the video signal is not broadcast
Landscapes
- Engineering & Computer Science (AREA)
- Multimedia (AREA)
- Signal Processing (AREA)
- Mechanical Engineering (AREA)
- Closed-Circuit Television Systems (AREA)
- Traffic Control Systems (AREA)
Abstract
Description
【0001】
【発明の属する技術分野】
本発明は、駐車支援装置に関する。
【0002】
【従来の技術】
近年、車両後方確認用バックモニタ装置が普及している。このバックモニタ装置の特徴は、バックミラーの死角部分をビデオカメラで監視することによって、車両のドライバが容易に後方(周辺)確認を行うことができることであり、特にトラックのようにキャビン(荷箱)によって真後ろ周辺が死角になる場合に有効となる。
【0003】
また、バックモニタ装置の中には、ただドライバに画像を見せるだけでなく、特開昭64−14700号公報(特許文献1)に示されているように、車両後退時にステアリング角に応じた後輪の予測進路軌跡をモニタの後方又は後側方視界の画像上に重畳表示し、ドライバの操作性を向上させるものもある。
【0004】
上述の従来技術に開示されている後輪の予測進路軌跡表示は、自車両の進行方向と車幅が一目で分かるので、ドライバは、駐車時の後方走行を容易に行うことができるようになる。ところが、回転走行時においては、車両が後方にたとえば時計回りに回転すると、回転に対して外側となる前輪は、外側の後輪の進路とは異なり大回りする。そのため、ドライバは、後輪の予測進路軌跡内だけを注視し、運転操作に夢中になっていると、後輪より大回りする車両前方ボデー部などが、障害物に接触することがあり得る。
【0005】
そこで、上述の問題を解決する技術として、出願人が先に提案している特開2000−339598号公報(特許文献2)に開示されている技術がある。この技術では、車両の前進または後退時の車両の最小旋回部(たとえば、内側の後輪)と最大旋回部(たとえば、車両の外形の前端)の予測進路軌跡を算出し、前方または後方画像に重畳して同時に表示している。それにより、車両の予測進路方向と車幅が分かり、さらに、前方または後方確認範囲が明確となるので、ドライバの前方または後方確認と操作性が容易となる利点がある。
【0006】
【特許文献1】
特開昭64−14700号公報
【特許文献2】
特開2000−339598号公報
【0007】
【発明が解決しようとする課題】
しかしながら、上述の技術はどちらも、縦列駐車または並列駐車させる際、車両を前進または後退させている時に運転者の操舵の支援とはなるが、前進または後退させる前に、縦列駐車または並列駐車をスタートさせる初期位置を的確に運転者に知らしめることができなかった。
【0008】
そこで本発明は、上述した従来の問題点に鑑み、駐車させる際に車両を移動させるのに必要なスペースを確認することができる駐車支援装置を提供することを目的としている。
【0009】
【課題を解決するための手段】
上記課題を解決するためになされた請求項1記載の発明は、車両に搭載された撮像手段により撮像された車両周辺の撮像画像を車両内の表示手段に表示して、車両の駐車時の支援を行う駐車支援装置であって、車両の側方に車両から所定の間隔だけ離れたところに車両の前後方向と平行に引かれ、駐車時の車両移動に必要な側方スペースを表す側方スペース線を、上記撮像画像に重畳して上記表示手段に表示させる重畳手段を備えたことを特徴とする駐車支援装置に存する。
【0010】
請求項1記載の発明によれば、車両に搭載された撮像手段により撮像された車両周辺の撮像画像を車両内の表示手段に表示して、車両の駐車時の支援を行う駐車支援装置であって、車両の側方に車両から所定の間隔だけ離れたところに車両の前後方向と平行に引かれ、駐車時の車両移動に必要な側方スペースを表す側方スペース線を、撮像画像に重畳して表示手段に表示させる重畳手段を備えているので、駐車時の運転者の判断を容易にし、運転者の操作負担を軽減することができる。
【0011】
上記課題を解決するためになされた請求項2記載の発明は、前記所定の間隔は、車両の最大旋回部の予想進路軌跡の接線が側方スペース線と平行になったときの車両と上記接線の間隔より大きく設定されることを特徴とする請求項1記載の駐車支援装置に存する。
【0012】
請求項2記載の発明によれば、所定の間隔は、車両の最大旋回部の予想進路軌跡の接線が側方スペース線と平行になったときの車両と接線の間隔より大きく設定されるので、駐車時に車両を安全に移動させることができる。
【0013】
上記課題を解決するためになされた請求項3記載の発明は、前記最大旋回部は、車両の前端の角であることを特徴とする請求項1または2記載の駐車支援装置に存する。
【0014】
請求項3記載の発明によれば、最大旋回部は、車両の前端の角であるので、駐車時にステアリングを操舵する際に、安全を確保することができる。
【0015】
上記課題を解決するためになされた請求項4記載の発明は、前記重畳手段は、並列駐車モード時には、前記側方スペース線と車両の後輪の予想進路軌跡とを上記撮像画像に重畳して上記表示手段に表示させることを特徴とする請求項1から3のいずれか1項に記載の駐車支援装置に存する。
【0016】
請求項4記載の発明によれば、重畳手段は、並列駐車モード時には、側方スペース線と車両の後輪の予想進路軌跡とを撮像画像に重畳して表示手段に表示させるので、並列駐車時にステアリングを操舵して車両を後退させる際に、安全を確認することができる。
【0017】
上記課題を解決するためになされた請求項5記載の発明は、前記重畳手段は、縦列駐車モード時には、前記側方スペース線とステアリングの転舵後の車両の最大旋回部の予想進路軌跡とを上記撮像画像に重畳して上記表示手段に表示させることを特徴とする請求項1から3のいずれか1項に記載の駐車支援装置に存する。
【0018】
請求項5記載の発明によれば、重畳手段は、縦列駐車モード時には、側方スペース線とステアリングの転舵後の車両の最大旋回部の予想進路軌跡とを撮像画像に重畳して上記表示手段に表示させるので、縦列駐車時にステアリングを操舵して車両を後退させる際に、安全を確認することができる。
【0019】
上記課題を解決するためになされた請求項6記載の発明は、前記重畳手段は、前記側方スペース線と、前記側方スペース線と直交する前後マーカー線とを上記撮像画像に重畳して上記表示手段に表示させることを特徴とする請求項1から3のいずれか1項に記載の駐車支援装置に存する。
【0020】
請求項6記載の発明によれば、重畳手段は、側方スペース線と、側方スペース線と直交する前後マーカー線とを撮像画像に重畳して表示手段に表示させるので、並列または縦列駐車時にステアリングを操舵して車両を移動させる際に、安全を確認することができる。
【0021】
上記課題を解決するためになされた請求項7記載の発明は、前記前後マーカー線は、自車両の前端から延長される車両前端延長線であることを特徴とする請求項6記載の駐車支援装置に存する。
【0022】
請求項7記載の発明によれば、前後マーカー線は、自車両の前端から延長される車両前端延長線であるので、駐車支援の効果に加えて交差点などにおける自車両の飛び出し長がわかるという効果が見込める。
【0023】
【発明の実施の形態】
以下、本発明の実施の形態を図面に基づいて説明する。本発明に係る駐車支援装置は、要約すれば、車両に搭載され、並列駐車や縦列駐車のために車両を移動させる際に必要なスペースを側方スペース線等で画像上に表示することにより、車両が周辺の車両等に接触しないことを簡便に確認できるようにし、運転者の負担を軽減するものである。
【0024】
(第1の実施形態)
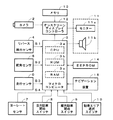
まず、本発明の第1の実施形態について図1〜図15を参照して説明する。図1は、本発明に係る駐車支援装置の第1の実施形態を示すブロック図である。同図において、駐車支援装置は、撮像手段としてのカメラ2、マイクロコンピュータ(以下、マイコンという)3、リバース検出センサ4、舵角検出手段としての舵角センサ5、走行センサ6、ヨーレートセンサ7、並列駐車開始スイッチ8、縦列駐車開始スイッチ9、駐車エリア選択スイッチ10、指示部11、重畳手段としてのオンスクリーンディスプレイコントローラ(以下、OSDCという)12、記憶手段としてのメモリ13およびEEPROM14から構成される。
【0025】
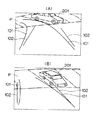
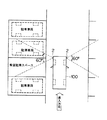
カメラ2は、図2(A)および(B)に示すように、自車両100の後方に取り付けられ、並列駐車または縦列駐車の際に希望駐車スペースが視認できる水平視野角(たとえば、120度)を有しており、車両後方の撮像画像を、OSDC12に対して出力する。指示部11は、表示手段としてのモニター11aと、スピーカ11bを有する。
【0026】
マイコン3には、ギア機構に取り付けられギアがリバースに入ったとき、Hレベルのリバース信号S1を出力するリバース検出センサ4と、車両のステアリング機構に取り付けられ、ステアリングが単位角度回転する毎にパルス信号S2を出力する舵角センサ5と、車両のトランスミッション機構に取り付けられ、車両が単位距離走行する毎にパルス信号S3を出力する走行センサ6と、車両の重心回りに生じているヨーレートを検出してヨーレート検出信号S4を出力するヨーレートセンサ7と、並列駐車モードを指示する並列駐車開始スイッチ8と、縦列駐車モードを指示する縦列駐車開始スイッチ9と、駐車エリアを選択する指示を行う駐車エリア選択スイッチ10と、音声メッセージを出力するスピーカ11bと、OSDC12と、イグニッションスイッチオフ時のステアリング舵角を記憶するEEPROM14とが接続されている。また、マイコン3には、ナビゲーション装置15も接続されている。
【0027】
マイコン3は、制御プログラムに従って動作するCPU3aと、CPU3aの制御プログラムおよび車両の最小回転半径Rmin、車両の形状などの車両情報が予め格納されているROM3bと、舵角センサ5および走行センサ6から出力されるパルス信号S2、S3をカウントするカウントエリアが形成されているなど、CPU3aの演算実行時に必要なデータを一時的に保持するRAM3cとを有している。
【0028】
OSDC12は、カメラ2、メモリ13およびモニター11aが接続され、カメラ2からの撮像画像へメモリ13から読み出されるパターン画像(後述する)を重ね合わせた(スーパーインポーズした)画像信号をモニター11aに出力する。
【0029】
メモリ13は、ROM等からなり、並列および縦列駐車モード時に使用される文字メッセージと、ステアリング舵角に対応する予想軌跡パターンデータと、側方スペース線パターンデータとが予め格納されている。
【0030】
側方スペース線パターンデータにおける側方スペース線とは、車両の側方に車両から所定の間隔だけ離れたところに車両の前後方向と平行に所定の長さだけ車両の後方に引かれ、駐車時の車両移動に必要な側方スペースを表す線である。
【0031】
予想軌跡パターンは、並列駐車モード用と縦列駐車モード用の2種類が格納されている。並列駐車モード用の予想軌跡パターンは、たとえば、車両の後輪の予想進路軌跡と車幅を表す車幅延長線とが、ステアリング舵角の所定角度(たとえば、2°)毎に最大角(たとえば、±35°)までそれぞれのステアリング舵角に対応して複数枚格納されている。
【0032】
また、縦列駐車モード用の予想軌跡パターンは、ステアリングの一方向への任意角操舵、切り返し転舵点およびステアリングの他方向への最大角操舵の組み合わせによる車両の後輪の予想進路軌跡と、予想進路軌跡の終点における車両の停止位置およびサイズを表す標準駐車位置とを組み合わせた第1の予想軌跡パターンと、切り返し転舵点の位置において転舵した時の路肩側(または縁石側)駐車位置予測線からなる第2の予想軌跡パターンと、ステアリングの他方向への転舵時の最大角操舵時における車両の最大旋回部の予想進路軌跡からなる第3の予想軌跡パターンとを含む。
【0033】
次に、上述した構成の駐車支援装置の並列駐車モード時の動作について、図3に示すCPU3aの処理のフローチャートを参照して説明する。
【0034】
通常、CPU3aは、ナビゲーション装置15によりナビゲーション機能を働かせ、モニター11aおよびスピーカ11bを使用して、出発地から目的地までの経路案内や自車両の現在位置を表示したり音声案内したりしている。
【0035】
そこで、まず並列駐車開始スイッチ8を押すことにより、駐車支援処理が開始され、初期化処理が行われる(ステップS1)。次いで、イグニッションスイッチがオフか否かが判定される(ステップS2)。
【0036】
イグニッションスイッチがオフされていれば(ステップS1のY)、舵角センサ5からのパルス信号S2によりその時点のステアリング舵角をEEPROM14に保存する(ステップS3)。EEPROM14に保存されたステアリング舵角は、イグニッションスイッチオン時に読み出され、ステアリングの状態が確認される。ステップS3に続いて、終了処理が行われ(ステップS4)、次いで、駐車支援処理が終了する。
【0037】
一方、イグニッションスイッチがオフされていなければ(ステップS2のN)、リバース検出センサ4からのリバース信号(パルス信号S1)が有るか否か(換言すれば、ギヤがリバースに入れられたか否か)が判定され(ステップS5)、なければ、ステップS2に戻る。
【0038】
リバース信号(パルス信号S1)が有れば(ステップS5のY)、それに応じて、ナビゲーション機能が停止されると共に、モニター11aの画面がナビゲーション画像からカメラ2のからのカメラ画像の表示に切り換えられる(ステップS6)。次いで、舵角センサ5からのパルス信号S2によりステアリング舵角を読み込み(ステップS7)、次いで、メモリ13を参照して、読み込んだステアリング舵角に対応する並列駐車モード用の予想軌跡パターンをメモリ13から読み出す(ステップS8)。
【0039】
次いで、メモリ13から読み出された予想軌跡パターンが、OSDC12でカメラ2からのカメラ画像に重畳され、モニター11aの画面に描画される(ステップS9)
【0040】
次いで、リバース検出センサ4からのリバース信号(パルス信号S1)が有るか否か(換言すれば、ギヤがリバースに入れられたか否か)が判定され(ステップS10)、有れば、ステップS5に戻る。
【0041】
一方、リバース信号(パルス信号S1)がなければ(ステップS10のN)、リバースが解除されたことを意味するので、モニター11aの画面を消去し(ステップS11)、次いで、ステップS2に戻る。
【0042】
次に、並列駐車モード時の動作の具体例について詳述する。図4および図5は、並列駐車モード時の具体的な駐車支援動作を説明する図であり、以下これらの図を参照しながら説明する。
【0043】
通常、CPU3aは、ナビゲーション装置15によりナビゲーション機能を働かせ、モニター11aおよびスピーカ11bを使用して、出発地から目的地までの経路案内や自車両の現在位置を表示したり音声案内したりしている。
【0044】
そこで、図4に示すように、まず、自車両100を位置Aに停止させる。これは、運転者が、駐車予定の駐車スペースPを過ぎて数メートル進み、駐車スペースPの前方にある駐車車両201から適当な間隔を置いて、または、図4において点線で示す駐車枠線が地面に引かれている場合は駐車予定の駐車スペースPの前方の駐車枠から適当な間隔(たとえば、2メートル程度)を置いて、自車両100を停止させることにより行われる。
【0045】
このように位置Aに停止した後、次に、並列駐車モードへ移行する。これは、運転者が、ギヤをリバースに入れた後、並列駐車開始スイッチ8を押下することにより行われる。なお、並列駐車開始スイッチ8をもう一度押下すると、並列駐車モードが解除される。
【0046】
並列駐車開始スイッチ8が押下されると、並列駐車開始スイッチ8からの並列駐車開始信号の入力に応じて、CPU3aは、ナビゲーション機能を停止させ、モニター11aの画面をナビゲーション画面からカメラ2からの撮像画像に切り換えると共に、予めメモリ3に格納されている側方スペース線108a、108bパターンデータと、後輪の予想進路軌跡101からなる並列駐車モード用の予想軌跡パターンを読み出し、OSDC12で撮像画像に重畳し、モニター11aの画面に表示させる。
【0047】
側方スペース線108a,108bは、自車両100より所定距離離れたところに自車両100の前後方向に平行になるように引かれる。図4では、側方スペース線108aは、自車両100の左側にある駐車スペースPへの並列駐車を想定したものであるが、フル舵角での内側後輪の予想進路軌跡101が隣の駐車枠に干渉しないようにするために最低限必要な自車両100からの距離D1を示すもので、この側方スペース線108aよりも駐車枠の列線が離れていれば良いことになる。
【0048】
駐車する側と反対側の側方スペース線108bは、自車両100の最大旋回部、すなわち前端外側の角が移動する際に、外側に旋回して広がるのに必要な距離D2を表すものであり、図4では、表示誤差等を考え、フル舵角での最大旋回部、すなわち前端外側の角の予想進路軌跡109に対する接線が、側方スペース線108bと平行になったときの自車両100と接線の間隔より、旋回余裕スペースd1だけ離れたところに引かれる。
【0049】
側方スペース線108a、108bは、左右同じ距離に設定すると、左右どちらの駐車スペースに駐車するかを決定する前に、モニター11aに表示することが可能であり、非常に有効である。図4の例では、D1=D2=1.8mに設定している。
【0050】
このように設定された並列駐車モード用の側方スペース線108a、108bのパターンデータが、予めメモリ13に格納されているのである。
【0051】
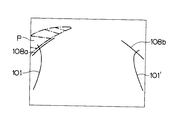
図6は、側方スペース線と後輪の予想進路軌跡が、カメラ2による後方の撮像画像に重畳されて、自車両100の運転席の近傍に設置されたモニター11aの画面に表示された例を示す。図6では、駐車予定の駐車枠Pに対応する側方スペース線108aおよび内側後輪の予想進路軌跡101と、駐車予定の駐車枠の反対側に表示される側方スペース線108bおよび内側後輪の予想進路軌跡101′とが表示されている。側方スペース線108bおよび内側後輪の予想進路軌跡101′は、自車両100の右側にある駐車スペースに並列駐車する際に利用される。
【0052】
運転者は、モニター11aの画面で側方スペース線108aを見ることにより、駐車予定の駐車スペースP側において駐車車両201の横に所定距離(この例では1.8m)の側方スペースを空けて停車ができたか、また、並列駐車のための旋回に必要な反対側の側方スペースが空いているかどうかを確認することができる。
【0053】
上述のようにして、自車両100の両側方のスペースが並列駐車のための旋回に必要な分空いていることが確認できたならば、次に、運転者は、側方スペース108aと同時に表示されている内側後輪の予想進路軌跡101を見ながら、自車両100をまっすぐ後退させ、図5に示すように、側方スペース108aと内側後輪の予想進路軌跡101の交点が、並列駐車する際に接触するかどうか気になる駐車車両201(もしくは、その駐車している駐車枠)より後方に見える位置になったこと、または、内側後輪の予想進路軌跡101が駐車車両201の前端の角(もしくは、その駐車している駐車枠)より後方に見える位置Bになったことを確認し、自車両を100を停止させる。
【0054】
次いで、運転者は、所定角度にステアリングを転舵し、駐車スペースPへ向けて自車両を後退させる。
【0055】
運転者が、上述のように、所定の角度にステアリングを転舵した段階で、図6のように表示されていた側方スペース線108a,108bと内側後輪の予想進路軌跡101,101′はモニター11aの画面から削除されると共に、転舵時のステアリング舵角に応じて、車幅延長線102と両後輪の予想進路軌跡101とを有する並列駐車モード用の予想軌跡パターンがメモリ13から読み出されて、モニター11aの画面に表示される。
【0056】
図7は、この段階の並列駐車モード時のモニター11aの画面の一例を示し、並列駐車する際の予想軌跡パターンの予想進路軌跡101および車幅延長線102が表示されている。図7(A)は、ゼロ舵角以外の所定のステアリング舵角を保ったまま、自車両100を後退させる場合を示し、図7(B)は、図7(A)の場合と異なる、ゼロ舵角以外のステアリング舵角を保って、自車両100を後退させる場合を示している。
【0057】
図7(A)および(B)から分かるように、ステアリング舵角を変更すると、変更後のステアリング舵角に応じて、曲線の曲がり具合の異なる予想進路軌跡101を有する並列駐車モード用の予想軌跡パターンがメモリ13から読み出されて、モニター11aの画面で表示されるので、運転者は、モニター11aの画面を見ながら、空いている駐車スペース(たとえば、駐車スペースPまたは駐車スペースPより手前で空いている駐車枠)に予想進路軌跡101がちょうど合うようにステアリングを操舵し、自車両100を後退させることにより、容易に並列駐車することができる。
【0058】
なお、ステアリングをフル舵角にして後退した場合には、駐車スペースPに駐車することになる。このとき、内側後輪の予想進路軌跡101と駐車スペースPの自車両100側の列線との交点Xが、この列線と、駐車車両201が駐車している隣の駐車枠と駐車スペースPの区切り線との交点に一致するように自車両100を位置Bに停止させた後、フル舵角にして後退した場合には、自車両100を、駐車車両201のある駐車枠から駐車余裕スペースd2を開けて好適に駐車スペースPに駐車させることができる。
【0059】
次に、縦列駐車開始スイッチ9を操作することにより開始される縦列駐車モード時の動作の具体例について詳述する。
【0060】
縦列駐車モードにおいては、図8の縦列駐車支援イメージ図に示すように、自車両100が空いている駐車スペースPに縦列駐車しようとする場合は、通常、自車両100は、駐車スペースPを通り過ぎた停止位置から、ステアリングの一方向への最大角操舵による始点c1から切り返し転舵点c2に至る自車両100の第1回転中心d1から回転半径Rmin(ただしRmin=最小回転半径)および旋回角θ1で規定される第1旋回経路L1と、ステアリングの他方向への最大角操舵による切り返し転舵点c2から終点c3に至る第2回転中心d2から回転半径Rminおよび旋回角θ2(=θ1)で規定される第1旋回経路L1の旋回方向とは逆の第2旋回経路L2とから構成される走行経路をたどって駐車スペースPに駐車される。
【0061】
なお、上述の走行経路は、ステアリングの一方向への最大角以外の任意角操舵、切り返し転舵点およびステアリングの他方向への最大角操舵の組み合わせによる走行経路としても良く、ここでは、一例として、ステアリングの一方向への15度操舵、切り返し転舵点およびステアリングの他方向への最大角操舵の組み合わせによる走行経路をたどって自車両100を駐車スペースPに縦列駐車させる場合について説明する。
【0062】
図9〜図11は、縦列駐車モード時の具体的な駐車支援動作を説明する図であり、以下、これらの図を参照しながら説明する。
【0063】
通常、CPU3aは、ナビゲーション装置15によりナビゲーション機能を働かせ、モニター11aおよびスピーカ11bを使用して、出発地から目的地までの経路案内や自車両の現在位置を表示したり音声案内したりしている。
【0064】
そこで、図9に示すように、まず、自車両100を位置Aに停止させる。これは、運転者が、駐車予定の駐車スペースPの前方に駐車している車両201から適当な間隔(たとえば、1メートル程度)を置いて、または、たとえば図9に点線で示すような駐車枠線が地面に引かれている場合は駐車予定の駐車スペースPの前方の駐車枠線から適当な間隔をおいて、自車両100を停止させることにより行われる。
【0065】
このように位置Aに停止した後、次に、縦列駐車モードへ移行する。これは、運転者が、ギアをリバースに入れた後、縦列駐車開始スイッチ9を押下することにより行われる。なお、縦列駐車開始スイッチ9をもう一度押下すると、縦列駐車モードが解除される。
【0066】
縦列駐車開始スイッチ9が押下されると、縦列駐車開始スイッチ9からの縦列駐車開始信号の入力に応じて、CPU3aは、ナビゲーション機能を停止させ、モニター11aの画面をナビゲーション画面からカメラ2からのカメラ画像に切り換えると共に、予めメモリ3に格納されている側方スペース線108a、108bパターンデータと、第3の予想軌跡パターン、すなわち、ステアリングの他方向への転舵時の最大角操舵時における車両の最大旋回部の予想進路軌跡110を読み出し、OSDC12で撮像画像に重畳し、モニター11aの画面に表示させる。
【0067】
縦列駐車モード時の側方スペース線108a,108bは、並列駐車モード時の側方スペース線と同様に、自車両100より所定距離離れたところに自車両100の前後方向に平行になるように引かれるが、図9では、側方スペース線108aは、自車両100の左側にある駐車スペースPへの縦列駐車を想定し、距離D3のところに引かれる。
【0068】
駐車する側と反対側の側方スペース線108bは、自車両100の最大旋回部、すなわち前端外側の角が移動する際に、外側に旋回して広がるのに必要な距離D4を表すものであり、図9では、表示誤差等を考え、たとえばステアリング舵角が15度の場合の最大旋回部、すなわち前端外側の角の予想進路軌跡109に対する接線が、側方スペース線108bと平行になったときの自車両100と接線の間隔より、旋回余裕スペースd3だけ離れたところに引かれる。
【0069】
側方スペース線108a、108bは、左右同じ距離に設定すると、左右どちらの駐車スペースに駐車するかを決定する前に、モニター11aに表示することが可能であり、非常に有効である。図9の例では、D3=D4=1mに設定している。
【0070】
このように設定された縦列駐車モード用の側方スペース線108a、108bのパターンデータが、予めメモリ13に格納されているのである。
【0071】
また、ステアリングの他方向への転舵時の最大角操舵時における車両の最大旋回部の予想進路軌跡110は、図8におけるステアリングの他方向への最大角操舵による切り返し転舵点c2から終点c3に至る第2回転中心d2から回転半径Rminおよび旋回角θ2(=θ1)で規定される第1旋回経路L1の旋回方向とは逆の第2旋回経路L2を、自車両100が走行する場合に、自車両100の前端外側の角(すなわち、図9の例では前端左側の角)が最大旋回部となって描く予想進路軌跡である。
【0072】
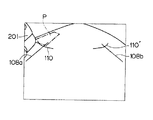
図12は、側方スペース線とステアリングの他方向への転舵時の最大角操舵時における車両の最大旋回部の予想進路軌跡とが、撮像画像に重畳されて、モニター11aの画面に表示された例を示す。図12では、駐車予定の駐車枠Pに対応する側方スペース線108aおよび最大旋回部の予想進路軌跡110と、駐車予定の駐車枠の反対側に表示される側方スペース線108bおよび最大旋回部の予想進路軌跡110′とが表示されている。側方スペース線108bおよび最大旋回部の予想進路軌跡110′は、自車両100の右側にある駐車スペースに縦列駐車する際に利用される。
【0073】
運転者は、モニター11aの画面で側方スペース線108aを見ることにより、駐車予定の駐車スペースP側において前方駐車車両201の横に所定距離(この例では1m)の側方スペースを空けて停車ができたか、また、縦列駐車のための旋回に必要な反対側の側方スペースが空いているかどうかを確認することができる。
【0074】
上述のようにして、自車両100の両側方のスペースが縦列駐車のための旋回に必要な分空いていることが確認できたならば、次に、運転者は、側方スペース108aと同時に表示されている最大旋回部の予想進路軌跡110を見ながら、自車両100をまっすぐ後退させ、図10に示すように、側方スペース108aと最大旋回部の予想進路軌跡110の交点が、縦列駐車する際に接触するかどうか気になる駐車車両201(もしくは、その駐車している駐車枠)より後方に見える位置になったこと、または、最大旋回部の予想進路軌跡110が前方駐車車両201の後端の角(もしくは、その駐車している駐車枠)より後方に見える位置Bになったことを確認し、自車両を100を停止させる。
【0075】
この停止位置は、縦列駐車のために後述する後退動作を開始するのに最適な位置(すなわち、図8の始点c1に相当する位置)となる。
【0076】
次に、車両の左右どちらに転舵するのかが決定される。これは、運転者がステアリングを駐車したい側に切る(1回目の転舵動作)ことにより生じる舵角センサ5のパルス信号S2の検出に基づいて行われる。たとえば、車両の左側にある駐車スペースに駐車したい場合は、運転者は、ステアリングを左に転舵する。このとき、運転者が、左にステアリング角度15度操舵した段階で、舵角センサ5からの左15度操舵に相当するパルス信号S2に応じて、図12のように表示されていた側方スペース線108a、108bと最大旋回部の予想進路軌跡110,110′は画面から削除されると共に、舵角センサ5から出力されるパルス信号S2に応じて、左側の駐車スペースに対応する縦列駐車モード用の第1の予想軌跡パターンデータがメモリ13から読み出され、モニター11aの画面に表示される。
【0077】
同様に、車両の右側にある駐車スペースに駐車したい場合は、運転者は、ステアリングを右に操舵する。このとき、運転者が、右にステアリング角度15度操舵した段階で、舵角センサ5からの左15度操舵に相当するパルス信号S2に応じて、図12のように表示されていた側方スペース線108a、108bと最大旋回部の予想進路軌跡110,110′は画面から削除されると共に、舵角センサ5から出力されるパルス信号S2に応じて、右側の駐車スペースに対応する縦列駐車モード用の第1の予想軌跡パターンデータがメモリ13から読み出され、モニター11aの画面に表示される。
【0078】
図13は、このように自車両100が図10の位置Bに停止している時、モニター11aの画面に表示される、左側の駐車スペースPへ縦列駐車する場合の縦列駐車モード用の第1の予想軌跡パターンの予想進路軌跡101および駐車標準位置104を表している。この図13は、自車両100が駐車スペースP内にうまく駐車できる場合を示している。
【0079】
一方、モニター11aの画面の観測により、自車両100が駐車スペースPからかなりはみ出している場合には、運転者は、縦列駐車モードを解除して、縦列駐車モードのこれまでの操舵をやり直し、再度、モニター11aの画面に表示される、左側の駐車スペースPへ縦列駐車する場合の縦列駐車モード用の第1の予想軌跡パターンの予想進路軌跡101および駐車標準位置104を観測し、自車両100がほぼ駐車スペースPに入る形になっていることを確認する。
【0080】
次に、自車両100の後退を開始させる。このとき、予め格納されている文字メッセージ「周囲に注意して、後退してください。」がメモリ13から読み出されて、カメラ画像に重畳され、モニター11aの画面に表示される。
【0081】
次に、ステアリングを舵角15度に保ったまま車両を位置Bから後退させると、走行センサ6から出力されるパルス信号S3に応じて、図13に示す予想進路軌跡101および駐車標準位置104がモニター11aの画面から削除され、代わりに、左側の駐車スペースに対応する縦列駐車用の第2の予想軌跡パターンデータがメモリ13から読み出され、モニター11aの画面に表示される。
【0082】
図14(A)は、位置Bからの後退後のモニター11aの画面の表示例を示す。図14(A)では、第2の予想軌跡パターンの路肩側駐車位置予測線111が、縦列駐車しようとする駐車スぺースPに近い側の車両後輪の予想進路軌跡である外側予想進路軌跡として、円弧状に画面に表示されていることが確認できる。
【0083】
なお、図14(B)の変形例に示すように、路肩側駐車位置予測線111として、上述の外側予想進路軌跡の路肩平行接線を、直線状に画面に表示しても良い。
【0084】
運転者は、自車両100の後退につれてこの路肩側駐車位置予測線111が路肩に近づき、ほぼ駐車スペースP内の路肩寄りを通ることを確認したら、自車両100を停止させる。この停止位置は、ほぼ図11に示す位置Cと等しくなる。この位置Cは、縦列駐車のために2回目の転舵動作を行うのに最適な位置(すなわち、図8で示した切り返し転舵点c2に相当する位置)である。
【0085】
次に、位置Cにおいて車両の転舵を行う。これは、運転者が、ステアリングを逆方向にフル操舵することにより行われる。このフル操舵に基づき舵角センサ5からの最大角を示すパルス信号S2に対応して、図14(A)に示す路肩側駐車位置予測線111がモニター11aの画面から削除され、代わりに、舵角センサ5からの最大角を示すパルス信号S2に対応する並列駐車用の予想軌跡パターンが、メモリ13から読み出され、予想進路軌跡101と車幅延長線102がカメラ画像に重畳され、モニター11aの画面に表示される。
【0086】
図15は、縦列駐車モード時の位置Cにおけるモニター11aの画面の一例を示し、縦列駐車しようとする駐車スペースに向かう予想進路軌跡101と車幅延長線102が表示されている。
【0087】
次に、運転者は、フル操舵が保たれていることを確認し、続いて、モニター11aの画面の表示を確認する。モニター11aの画面において、進路予想軌跡101が駐車スペースPに合っている場合、後退を開始する。このとき、モニター11aの画面には、「周囲に注意して、後退してください。」という表示が重畳される。なお、進路予想軌跡101が駐車スペースPに合っていない場合は、ステアリングの操舵をフル操舵以外の舵角になるように調整して、進路予想軌跡101を駐車スペースPに合わせることができる。
【0088】
次に、図11に示すように、車両を位置Dで停止させる。この位置Dは、車両が駐車スペースに対して平行になった位置であり、車幅延長線102が路肩と平行になるまで運転者が自車両100を後退させ、運転者が平行になったことを確認して、ステアリングをまっすぐに戻し、車両を停止させる。
【0089】
最後に、リバースギアを解除することにより、縦列駐車モードが解除される。
【0090】
このように、本発明の第1の実施形態によれば、並列駐車や縦列駐車のために車両を移動させる際に必要なスペースが側方スペース線108a、108b等で、カメラ2よりの車両後方の撮像画像に重畳されてモニター11aの画面に表示されるので、車両が周辺の車両等に接触しないことを簡便に確認でき、駐車時の運転者の判断を容易にし、運転者の操作負担を軽減することができる。
【0091】
(第2の実施形態)
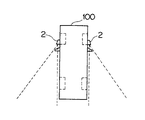
次に、本発明の第2の実施形態について図16〜図23を参照して説明する。この第2の実施形態においては、駐車支援装置は、第1の実施形態における図1に示すブロック図と同一構成を有するが、カメラ2は、図16に示すように、自車両100の側方に取り付けられ、並列駐車または縦列駐車の際に希望駐車スペースが視認できる水平視野角(たとえば、60度)を有しており、車両側方の撮像画像を、OSDC12に対して出力する。
【0092】
また、メモリ13には、側方スペース線パターンデータに代えて、側方スペース線およびこの側方スペース線と直交する前後マーカー線を含むパターンデータが予め格納されている。
【0093】
次に、上述した構成の駐車支援装置の第2の実施形態における並列駐車モード時の動作の具体例について詳述する。図17および図18は、並列駐車モード時の具体的な駐車支援動作を説明する図であり、以下これらの図を参照しながら説明する。
【0094】
通常、CPU3aは、ナビゲーション装置15によりナビゲーション機能を働かせ、モニター11aおよびスピーカ11bを使用して、出発地から目的地までの経路案内や自車両の現在位置を表示したり音声案内したりしている。
【0095】
そこで、図17に示すように、まず、自車両100を位置Aに停止させる。これは、自車両100が駐車予定の駐車スペースP付近に来たときに、運転者が、並列駐車開始スイッチ8を押下することにより、並列駐車モードへ移行する。
【0096】
並列駐車開始スイッチ8が押下されると、並列駐車開始スイッチ8からの並列駐車開始信号の入力に応じて、CPU3aは、ナビゲーション機能を停止させ、モニター11aの画面をナビゲーション画面からカメラ2からの側方撮像画像に切り換えると共に、予めメモリ13に格納されている側方スペース線および前後マーカー線を含むパターンデータを読み出し、OSDC12で側方撮像画像に重畳し、モニター11aの画面に表示させる。
【0097】
図17では、自車両100の左側にある駐車スペースPへの並列駐車を想定した側方スペース線108aおよび前後マーカー線112が示されているが、駐車する側と反対側(すなわち、右側)の側方スペース線および前後マーカー線は省略されている。
【0098】
図19は、側方スペース線と前後マーカー線が、カメラ2による側方撮像画像に重畳されて、自車両100の運転席の近傍に設置されたモニター11aの画面に表示された例を示す。図19では、カメラ2からの側方撮像画像で直接視認できる駐車予定の駐車スペースPに対応して、側方スペース線108aおよび前後マーカー線112が表示されている。
【0099】
運転者は、モニター11aの画面で側方スペース線108aを見ることにより、駐車予定の駐車スペースP側において駐車車両201の横に所定距離の側方スペースを空けて停車ができたか、また、並列駐車のための旋回に必要な反対側の側方スペースが空いているかどうかを確認することができる。また、運転者は、モニター11aの画面で前後マーカー線112の位置を見ることにより、駐車予定の駐車スペースPへ並列駐車するための初期位置Aを決めることができる。
【0100】
すなわち、図19に示す画面において、駐車を希望する駐車スペースPの隣の駐車枠、すなわち自車両の100の進入方向から見て前方の駐車車両201が駐車している駐車枠との区画境界線Pbと、自車両の左右方向と平行になるように表示される前後マーカー線112とが画面上でほぼ一致し、かつ自車両100の前後方向と平行になるように表示される側方スペース線108aと、駐車区画前縁線Paとがほぼ一致するようにすれば、初期位置Aが決定できる。この初期位置Aは、運転者が自車両100を移動させて合わせても良いし、モニター11aの画面を見ながら側方スペース線108aおよび前後マーカー線112の位置をキー入力手段(図示しない)からのキー入力等で調整し、最適な位置を選択しても良い。もちろん、自車両100の移動により大まかに合わせた後、キー入力手段からの入力等で微調整を画面上で行っても良い。
【0101】
なお、画面上で調整できる範囲には限界があるが、画面上の表示をキー入力手段等で調整する際には、駐車スペースPに至る予想軌跡パターンが変わるので、調整に応じた別の予想軌跡パターンをメモリ13から読み出す必要がある。
【0102】
上述のようにして、自車両100の初期位置Aが決定されたならば、CPU3aは、初期位置Aの決定に基づき、側方スペース線108aおよび前後マーカー線112をモニター11aの画面から削除し、初期位置Aに対応する予想軌跡パターンをメモリ13から読み出し、読み出した予想軌跡パターンに基づく駐車動作ガイドを行う。この駐車動作ガイドは、メモリ13に予め格納されている文字メッセージを読み出してモニター11aの画面に表示することにより行われる。
【0103】
運転者は、図18に示すように、側方スペース線108aおよび前後マーカー線112に合わせて停止した初期位置Aより、駐車動作ガイドに基づき、自車両100を駐車する方向と反対方向にステアリングを操舵し、予想軌跡パターンに基づいて予め決められたステアリング舵角を保持して予め決められた距離だけ自車両100を前進させ、位置Bへ移動させる。このとき、CPU3aは、舵角センサ5からのパルス信号S2と、走行センサ6からのパルス信号S3(または、図示しない方位角センサからの方位変化を示す信号)とを検出して、所定距離前進したことを検出する。
【0104】
運転者は、駐車動作ガイドにしたがい、位置Bで自車両100を停止させ、続いてギアをリバースに入れた後、ステアリングを反対方向の予め決められたステアリング舵角に転舵し、そのステアリング舵角を保持して、駐車スペースPへ向けて自車両100を後退させる。次いで、運転者は、自車両100が駐車スペースPに対して平行になったところ(図18における位置C)で、ステアリングを直進位置に戻し、さらに自車両100を後退させて駐車スペースP内に入りきったところで停止させ、並列駐車開始スイッチ8を押下して並列駐車モードを解除する。
【0105】
なお、位置B以降の動作では、側方を撮像するカメラ2に加えて、後方を撮像するカメラも装着されている場合には、後方撮像画像に駐車スペースPが映り始めるので、モニター11aの画面を側方カメラ2の撮像画像から後方カメラの撮像画像に切り替え、その画像上にステアリング舵角に応じた後輪の予想進路軌跡と車幅を表す車幅延長線など、ガイド用の重畳表示を出しても良い。
【0106】
また、図20に示すように、前後マーカー線112は、区画境界線Pbではなく、駐車を希望する駐車スペースPの手前側の駐車枠、すなわち駐車車両202が駐車している駐車枠との区画境界線Pcと画面上でほぼ一致するように、初期位置Aを決定することもできる。
【0107】
次に、上述した構成の駐車支援装置の第2の実施形態における縦列駐車モード時の動作の具体例について詳述する。図21および図22は、縦列駐車モード時の具体的な駐車支援動作を説明する図であり、以下これらの図を参照しながら説明する。
【0108】
通常、CPU3aは、ナビゲーション装置15によりナビゲーション機能を働かせ、モニター11aおよびスピーカ11bを使用して、出発地から目的地までの経路案内や自車両の現在位置を表示したり音声案内したりしている。
【0109】
そこで、図21に示すように、まず、自車両100を位置Aに停止させる。これは、自車両100が駐車予定の駐車スペースP付近に来たときに、運転者が、縦列駐車開始スイッチ9を押下することにより、縦列駐車モードへ移行する。
【0110】
並列駐車開始スイッチ9が押下されると、縦列駐車開始スイッチ8からの縦列駐車開始信号の入力に応じて、CPU3aは、ナビゲーション機能を停止させ、モニター11aの画面をナビゲーション画面からカメラ2からの側方撮像画像に切り換えると共に、予めメモリ13に格納されている側方スペース線および前後マーカー線を含むパターンデータを読み出し、OSDC12で側方撮像画像に重畳し、モニター11aの画面に表示させる。
【0111】
運転者は、モニター11aの画面で側方スペース線108aを見ることにより、駐車予定の駐車スペースP側において駐車車両201の横に所定距離の側方スペースを空けて停車ができたか、また、並列駐車のための旋回に必要な反対側の側方スペースが空いているかどうかを確認することができる。また、運転者は、モニター11aの画面で前後マーカー線112の位置を見ることにより、駐車予定の駐車スペースPへ並列駐車するための初期位置Aを決めることができる。
【0112】
すなわち、図21に示すように、駐車を希望する駐車スペースPの前方に駐車している駐車車両201の右後端に、側方スペース線108と前後マーカー線112の交点がほぼ一致するように、モニター11aの画面上で初期位置Aを決定することができる。(なお、駐車区画線が引いてある場合には、駐車車両201が駐車している駐車枠と駐車スペースP間の区画境界線と区画前縁線の交点に、側方スペース線108と前後マーカー線112の交点がほぼ一致するように、モニター11aの画面上で初期位置Aを決定することができる。)この初期位置Aは、運転者が自車両100を移動させて合わせても良いし、モニター11aの画面を見ながら側方スペース線108aおよび前後マーカー線112の位置をキー入力手段(図示しない)からのキー入力等で調整し、最適な位置を選択しても良い。もちろん、自車両100の移動により大まかに合わせた後、キー入力手段からの入力等で微調整を画面上で行っても良い。
【0113】
なお、画面上で調整できる範囲には限界があるが、画面上の表示をキー入力手段等で調整する際には、駐車スペースPに至る予想軌跡パターンが変わるので、調整に応じた別の予想軌跡パターンをメモリ13から読み出す必要がある。
【0114】
上述のようにして、自車両100の初期位置Aが決定されたならば、CPU3aは、初期位置Aの決定に基づき、側方スペース線108aおよび前後マーカー線112をモニター11aの画面から削除し、初期位置Aに対応する予想軌跡パターンをメモリ13から読み出し、読み出した予想軌跡パターンに基づく駐車動作ガイドを行う。この駐車動作ガイドは、メモリ13に予め格納されている文字メッセージを読み出してモニター11aの画面に表示することにより行われる。
【0115】
運転者は、図22に示すように、側方スペース線108aおよび前後マーカー線112に合わせて停止した初期位置Aより、駐車動作ガイドに基づき、自車両100を駐車する方向と反対方向にステアリングを操舵し、予想軌跡パターンに基づいて予め決められたステアリング舵角を保持して予め決められた距離だけ自車両100を前進させ、位置Bへ移動させる。この前進時でも、第1の実施形態に比べて、駐車スペースPから多くの距離を前進する必要がなく、斜めに前進することで、駐車動作の開始を他の車両の運転者にアピールすることができる。このとき、CPU3aは、舵角センサ5からのパルス信号S2と、走行センサ6からのパルス信号S3(または、図示しない方位角センサからの方位変化を示す信号)とを検出して、所定距離前進したことを検出する。
【0116】
運転者は、駐車動作ガイドにしたがい、位置Bで自車両100を停止させ、続いてギアをリバースに入れた後、ステアリングを直進位置に戻してそのまま後退させる。次いで、運転者は、駐車動作ガイドにしたがって位置Cで自車両100を再度停止させ、再びステアリングを自車両100を駐車する方向と反対方向の予め決められたステアリング舵角に転舵し、そのステアリング舵角を保持して、駐車スペースPへ向けて自車両100を後退させる。次いで、運転者は、自車両100が駐車スペースPに対して平行になったところ(図22における位置D)で、ステアリングを直進位置に戻し、駐車スペースPに対する自車両100の前後の位置を調整して停止させた後、並列駐車開始スイッチ8を押下して並列駐車モードを解除する。
【0117】
なお、位置B以降の動作では、側方を撮像するカメラ2に加えて、後方を撮像するカメラも装着されている場合には、後方撮像画像に駐車スペースPが映り始めるので、モニター11aの画面を側方カメラ2の撮像画像から後方カメラの撮像画像に切り替え、その画像上にステアリング舵角に応じた後輪の予想進路軌跡と車幅を表す車幅延長線など、ガイド用の重畳表示を出しても良い。
【0118】
このように、本発明の第2の実施形態によれば、並列駐車や縦列駐車のために車両を移動させる際に必要なスペースが側方スペース線108a、108b等で、カメラ2よりの車両後方の撮像画像に重畳されてモニター11aの画面に表示されるので、車両が周辺の車両等に接触しないことを簡便に確認でき、駐車時の運転者の判断を容易にし、運転者の操作負担を軽減することができる。
【0119】
以上の通り、本発明の実施の形態について説明したが、本発明はこれに限らず、種々の変形、応用が可能である。
【0120】
たとえば、重畳手段として、オンスクリーンディスプレイコントローラ12およびメモリ13に代えて、ステアリング角度が変わる度に走行予想軌跡を算出して再描画することができるグラフィックコントローラを用いても良い。
【0121】
また、第2の実施形態においては、側方スペース線と前後マーカー線によって初期位置Aを決定しているが、これに代わる変形例として、縦列駐車モード時に使用される標準駐車位置104の表示を利用して、たとえば並列駐車モード時の例である図23に示すように、モニター11aの画面上で、標準駐車位置104の表示が駐車スペースP内に入るように初期位置Aを決定しても良い。この場合の初期位置Aも、運転者が自車両100を移動させて合わせても良いし、モニター11aの画面を見ながら標準駐車位置104の表示位置をキー入力手段(図示しない)からのキー入力等で調整し、最適な位置を選択しても良い。もちろん、自車両100の移動により大まかに合わせた後、キー入力手段からの入力等で微調整を画面上で行っても良い。(なお、縦列駐車モード時においても、図示しないが同様のやり方で初期位置Aを決定することができる。)
【0122】
また、第2の実施形態においては、駐車動作ガイドをモニター11aの画面に文字メッセージを表示させることにより行っているが、これに限らず、スピーカ11bにより音声メッセージを出してガイドするように構成しても良く、または両方を併用しても良い。
【0123】
また、本発明の他の実施例として、第2の実施形態におけるカメラ2の側方撮像画像をモニター11aの画面に表示させる際、自車両100の前端から延長される車両前端延長線を前後マーカー線112としてモニター11aの画面に重畳して表示させることにより、駐車支援の効果に加えて交差点などにおける自車両の飛び出し長がわかるという効果が見込める。たとえば図24に示すように、運転者は、モニター11aに映るカメラ2の側方撮像画像上に重畳された仮想線である車両前端延長線113(ここでは、側方スペース線は省略されている)と、建物301,302の壁などの路側構造物とを比べることによって、自車両の交差道路側への飛び出し程度が分かり、安全確認を行うことができる。さらに、車両前端延長線113を起点として後方に向かって距離ゲージを表示しても良い。(距離ゲージは側方スペース線を起点にして横方向に表示することもできる。
【0124】
また、本発明のさらなる他の実施例として、側方撮像画像を得るカメラ2として、車両の前バンパー中央に装着され、1つで左右の側方を監視できるタイプのカメラを使用しても良い。さらに側方カメラであれば、車両中央部や後端部付近に取り付けても適用可能である。
【0125】
また、本発明のさらなる他の実施例として、図25に示すように、車両側面やドアミラー部に斜め後ろ向きに装着される後側方を撮像する後側方カメラ(またはドアカメラ)でも、同様に適用可能である。
【0126】
【発明の効果】
請求項1記載の発明によれば、駐車時の運転者の判断を容易にし、運転者の操作負担を軽減することができる。
【0127】
請求項2記載の発明によれば、駐車時に車両を安全に移動させることができる。
【0128】
請求項3記載の発明によれば、駐車時にステアリングを操舵する際に、安全を確保することができる。
【0129】
請求項4記載の発明によれば、並列駐車時にステアリングを操舵して車両を後退させる際に、安全を確認することができる。
【0130】
請求項5記載の発明によれば、縦列駐車時にステアリングを操舵して車両を後退させる際に、安全を確認することができる。
【0131】
請求項6記載の発明によれば、並列または縦列駐車時にステアリングを操舵して車両を移動させる際に、安全を確認することができる。
【0132】
請求項7記載の発明によれば、駐車支援の効果に加えて交差点などにおける自車両の飛び出し長がわかるという効果が見込める。
【図面の簡単な説明】
【図1】本発明による駐車支援装置の第1の実施形態を示すブロック図である。
【図2】(A)および(B)は、図1の駐車支援装置におけるカメラの取付位置を説明する図である。
【図3】図1の駐車支援装置の動作を説明するフローチャートである。
【図4】並列駐車モード時の具体的な駐車支援動作を説明する図である。
【図5】並列駐車モード時の具体的な駐車支援動作を説明する図である。
【図6】並列駐車モード時の位置Aにおけるモニターの画面の一例を示す。
【図7】(A)および(B)は、並列駐車モード時の位置Bにおけるモニターの画面の一例を示す。
【図8】縦列駐車モード時の駐車支援イメージ図である。
【図9】縦列駐車モード時の具体的な駐車支援動作を説明する図である。
【図10】縦列駐車モード時の具体的な駐車支援動作を説明する図である。
【図11】縦列駐車モード時の具体的な駐車支援動作を説明する図である。
【図12】縦列駐車モード時の位置Aにおけるモニターの画面の一例を示す図である。
【図13】縦列駐車モード時の位置Bにおける後退動作前のモニターの画面の一例を示す図である。
【図14】(A)および(B)は、縦列駐車モード時の位置Bにおける後退動作後のモニターの画面の一例を示す図である。
【図15】縦列駐車モード時の位置Cにおけるモニターの画面の一例を示す図である。
【図16】本発明による駐車支援装置の第2の実施形態におけるカメラの取付位置を説明する図である。
【図17】並列駐車モード時の具体的な駐車支援動作を説明する図である。
【図18】並列駐車モード時の具体的な駐車支援動作を説明する図である。
【図19】並列駐車モード時の位置Aにおけるモニターの画面の一例を示す。
【図20】並列駐車モード時の具体的な駐車支援動作の変形例を説明する図である。
【図21】縦列駐車モード時の具体的な駐車支援動作を説明する図である。
【図22】縦列駐車モード時の具体的な駐車支援動作を説明する図である。
【図23】第2の実施形態の変形例を説明する図である。
【図24】本発明の他の実施例を説明する図である。
【図25】本発明のさらなる他の実施例を説明する図である。
【符号の説明】
2 カメラ(撮像手段)
3 マイクロコンピュータ
4 リバース検出センサ
5 舵角センサ(舵角検出手段)
6 走行センサ
7 ヨーレートセンサ
8 並列駐車開始スイッチ
9 縦列駐車開始スイッチ
10 駐車エリア選択スイッチ
11 指示部
11a モニター(表示手段)
11b スピーカ
12 オンスクリーンディスプレイコントローラ(OSDC)(重畳手段)
13 メモリ(記憶手段)
14 EEPROM
101 後輪の予想進路軌跡
102 車幅延長線
104 標準駐車位置
108a,108b 側方スペース線
110 最大旋回部の予想進路軌跡
112 前後マーカー線
113 車両前端延長線[0001]
BACKGROUND OF THE INVENTION
The present invention relates to a parking assistance device.
[0002]
[Prior art]
In recent years, back monitor devices for vehicle rearward confirmation have become widespread. The feature of this back monitor device is that the driver of the vehicle can easily confirm the rear (periphery) by monitoring the blind spot portion of the rearview mirror with a video camera. ) Is effective when the area around the back is a blind spot.
[0003]
Further, in the back monitor device, not only the driver is shown an image, but also as shown in Japanese Patent Application Laid-Open No. 64-14700 (Patent Document 1), after the vehicle is moved backward according to the steering angle. In some cases, the predicted track trajectory of the wheel is superimposed and displayed on the image of the rear or rear side view of the monitor to improve the operability of the driver.
[0004]
Since the predicted trajectory display of the rear wheel disclosed in the above-described prior art can know the traveling direction and the vehicle width of the host vehicle at a glance, the driver can easily perform the backward traveling at the time of parking. . However, during rotational travel, when the vehicle rotates backward, for example, clockwise, the front wheels that are on the outside with respect to the rotation, unlike the course of the outer rear wheels, rotate a lot. Therefore, if the driver pays attention only to the predicted course trajectory of the rear wheel and is enthusiastic about the driving operation, the vehicle front body part that rotates more than the rear wheel may come into contact with the obstacle.
[0005]
Therefore, as a technique for solving the above-described problem, there is a technique disclosed in Japanese Patent Laid-Open No. 2000-339598 (Patent Document 2) previously proposed by the applicant. In this technology, the predicted trajectory of the minimum turning part (for example, the rear wheel on the inner side) and the maximum turning part (for example, the front end of the outer shape of the vehicle) at the time of forward or backward movement of the vehicle is calculated. They are superimposed and displayed simultaneously. Thereby, the predicted course direction and the vehicle width of the vehicle are known, and further, the front or rear confirmation range is clarified, so that there is an advantage that the front or rear confirmation and operability of the driver are facilitated.
[0006]
[Patent Document 1]
JP-A 64-14700
[Patent Document 2]
JP 2000-339598 A
[0007]
[Problems to be solved by the invention]
However, both of the above-mentioned techniques can assist the steering of the driver when the vehicle is moving forward or backward when parallel parking or parallel parking, but prior to moving forward or backward, parallel parking or parallel parking is required. The driver was not able to accurately tell the initial position to start.
[0008]
Therefore, in view of the above-described conventional problems, an object of the present invention is to provide a parking assistance device that can confirm a space necessary for moving a vehicle when parking.
[0009]
[Means for Solving the Problems]
In order to solve the above-mentioned problems, the invention according to
[0010]
According to the first aspect of the present invention, there is provided a parking support apparatus that displays a captured image of the periphery of the vehicle imaged by an imaging unit mounted on the vehicle on a display unit in the vehicle and assists when the vehicle is parked. In addition, a lateral space line that is drawn parallel to the vehicle front-rear direction at a predetermined distance from the vehicle at the side of the vehicle and that represents the side space necessary for vehicle movement during parking is superimposed on the captured image. Since the superimposing means for displaying on the display means is provided, the judgment of the driver at the time of parking can be facilitated, and the operation burden on the driver can be reduced.
[0011]
In order to solve the above-mentioned problem, the invention according to
[0012]
According to the invention of
[0013]
According to a third aspect of the present invention, there is provided the parking assist apparatus according to the first or second aspect, wherein the maximum turning portion is a corner of a front end of a vehicle.
[0014]
According to the invention described in
[0015]
According to a fourth aspect of the present invention for solving the above-mentioned problem, the superimposing means superimposes the side space line and an expected track of the rear wheel of the vehicle on the captured image in the parallel parking mode. It displays on the said display means, It exists in the parking assistance apparatus of any one of
[0016]
According to the fourth aspect of the present invention, the superimposing means superimposes the side space line and the expected trajectory of the rear wheel of the vehicle on the captured image in the parallel parking mode, and displays it on the display means. Safety can be confirmed when the vehicle is moved backward by steering.
[0017]
The invention according to
[0018]
According to the invention described in
[0019]
The invention according to
[0020]
According to the invention described in
[0021]
7. The parking assist apparatus according to
[0022]
According to the seventh aspect of the present invention, the front and rear marker lines are extended lines from the front end of the host vehicle, so that in addition to the effect of parking assistance, the effect of knowing the jump length of the host vehicle at an intersection or the like is obtained. Can be expected.
[0023]
DETAILED DESCRIPTION OF THE INVENTION
Hereinafter, embodiments of the present invention will be described with reference to the drawings. In summary, the parking assist device according to the present invention is mounted on a vehicle, and displays a space necessary for moving the vehicle for parallel parking or parallel parking on an image with a side space line or the like, This makes it possible to easily confirm that the vehicle does not come into contact with surrounding vehicles and the like, thereby reducing the burden on the driver.
[0024]
(First embodiment)
First, a first embodiment of the present invention will be described with reference to FIGS. FIG. 1 is a block diagram showing a first embodiment of a parking assistance apparatus according to the present invention. In the figure, the parking assist device includes a
[0025]
As shown in FIGS. 2 (A) and 2 (B), the
[0026]
The
[0027]
The
[0028]
The
[0029]
The
[0030]
The side space line in the side space line pattern data is drawn to the rear of the vehicle by a predetermined length parallel to the vehicle front-rear direction at a predetermined distance from the vehicle on the side of the vehicle. It is a line showing the side space required for vehicle movement.
[0031]
Two types of predicted trajectory patterns are stored for the parallel parking mode and the parallel parking mode. The expected trajectory pattern for the parallel parking mode is, for example, that the expected course trajectory of the rear wheel of the vehicle and the vehicle width extension line representing the vehicle width are the maximum angle (for example, 2 °) for each predetermined angle (for example, 2 °). , ± 35 °) are stored in correspondence with each steering angle.
[0032]
The expected trajectory pattern for the parallel parking mode is the expected trajectory trajectory of the rear wheel of the vehicle by a combination of arbitrary angle steering in one direction of steering, turning-back turning point and maximum angle steering in the other direction of steering, The first expected trajectory pattern that combines the standard parking position that represents the stop position and size of the vehicle at the end point of the course trajectory, and the road shoulder side (or curb side) parking position prediction when steered at the position of the turning turning point A second expected trajectory pattern composed of a line, and a third expected trajectory pattern composed of an expected trajectory trajectory of the maximum turning portion of the vehicle at the time of maximum angle steering when the steering is steered in the other direction.
[0033]
Next, operation | movement at the time of the parallel parking mode of the parking assistance apparatus of the structure mentioned above is demonstrated with reference to the flowchart of the process of CPU3a shown in FIG.
[0034]
Normally, the CPU 3a operates the navigation function by the navigation device 15, and uses the monitor 11a and the speaker 11b to display route guidance from the departure point to the destination, the current position of the host vehicle, and voice guidance. .
[0035]
Therefore, by first pressing the parallel
[0036]
If the ignition switch is off (Y in Step S1), the steering angle at that time is stored in the EEPROM 14 by the pulse signal S2 from the steering angle sensor 5 (Step S3). The steering angle stored in the EEPROM 14 is read when the ignition switch is turned on, and the state of the steering is confirmed. Subsequent to step S3, an end process is performed (step S4), and then the parking support process ends.
[0037]
On the other hand, if the ignition switch is not turned off (N in step S2), whether or not there is a reverse signal (pulse signal S1) from the reverse detection sensor 4 (in other words, whether or not the gear is put in reverse). Is determined (step S5), and if not, the process returns to step S2.
[0038]
If there is a reverse signal (pulse signal S1) (Y in step S5), the navigation function is stopped and the screen of the monitor 11a is switched from the navigation image to the display of the camera image from the
[0039]
Next, the expected trajectory pattern read from the
[0040]
Next, it is determined whether or not there is a reverse signal (pulse signal S1) from the reverse detection sensor 4 (in other words, whether or not the gear is put in reverse) (step S10). Return.
[0041]
On the other hand, if there is no reverse signal (pulse signal S1) (N in step S10), it means that the reverse has been canceled, so the screen of the monitor 11a is erased (step S11), and then the process returns to step S2.
[0042]
Next, a specific example of the operation in the parallel parking mode will be described in detail. 4 and 5 are diagrams for explaining a specific parking assist operation in the parallel parking mode, and will be described below with reference to these drawings.
[0043]
Normally, the CPU 3a operates the navigation function by the navigation device 15, and uses the monitor 11a and the speaker 11b to display route guidance from the departure place to the destination, the current position of the host vehicle, and voice guidance. .
[0044]
Therefore, as shown in FIG. 4, first, the
[0045]
After stopping at the position A in this way, next, a transition is made to the parallel parking mode. This is done by the driver depressing the parallel
[0046]
When the parallel
[0047]
The
[0048]
The
[0049]
If the
[0050]
The pattern data of the
[0051]
FIG. 6 shows an example in which the predicted path trajectory of the side space line and the rear wheel is displayed on the screen of the monitor 11a installed in the vicinity of the driver's seat of the
[0052]
The driver sees the
[0053]
As described above, if it is confirmed that the space on both sides of the
[0054]
Next, the driver turns the steering wheel at a predetermined angle and moves the host vehicle toward the parking space P.
[0055]
As described above, when the driver steers the steering wheel at a predetermined angle, the
[0056]
FIG. 7 shows an example of the screen of the monitor 11a in the parallel parking mode at this stage, in which an expected
[0057]
As can be seen from FIGS. 7A and 7B, when the steering rudder angle is changed, an expected trajectory for the parallel parking mode having an expected
[0058]
If the steering wheel is moved backward with a full steering angle, the vehicle is parked in the parking space P. At this time, the intersection X of the predicted
[0059]
Next, a specific example of the operation in the parallel parking mode that is started by operating the parallel parking start switch 9 will be described in detail.
[0060]
In the parallel parking mode, as shown in the parallel parking support image diagram of FIG. 8, when the
[0061]
The travel route described above may be a travel route by a combination of arbitrary angle steering other than the maximum angle in one direction of the steering, the turning-back turning point, and the maximum angle steering in the other direction of the steering. Here, as an example A case will be described in which the
[0062]
9-11 is a figure explaining the concrete parking assistance operation | movement at the time of parallel parking mode, and hereafter, it demonstrates, referring these figures.
[0063]
Normally, the CPU 3a operates the navigation function by the navigation device 15, and uses the monitor 11a and the speaker 11b to display route guidance from the departure place to the destination, the current position of the host vehicle, and voice guidance. .
[0064]
Therefore, first, the
[0065]
After stopping at the position A in this way, the process next shifts to the parallel parking mode. This is done by the driver depressing the parallel parking start switch 9 after putting the gear in reverse. Note that when the parallel parking start switch 9 is pressed again, the parallel parking mode is canceled.
[0066]
When the parallel parking start switch 9 is pressed, the CPU 3a stops the navigation function according to the input of the parallel parking start signal from the parallel parking start switch 9, and the screen of the monitor 11a is switched from the navigation screen to the
[0067]
The
[0068]
The
[0069]
If the
[0070]
The pattern data of the
[0071]
Further, the expected
[0072]
In FIG. 12, the side space line and the expected course trajectory of the maximum turning portion of the vehicle at the time of maximum angle steering at the time of steering in the other direction of the steering are superimposed on the captured image and displayed on the screen of the monitor 11a. An example is shown. In FIG. 12, the
[0073]
The driver sees the
[0074]
As described above, if it is confirmed that the space on both sides of the
[0075]
This stop position is an optimal position (that is, a position corresponding to the starting point c1 in FIG. 8) for starting a backward operation described later for parallel parking.
[0076]
Next, it is determined whether to steer to the left or right of the vehicle. This is performed based on detection of the pulse signal S2 of the
[0077]
Similarly, when the user wants to park in the parking space on the right side of the vehicle, the driver steers the steering to the right. At this time, the side space displayed as shown in FIG. 12 according to the pulse signal S2 corresponding to the left 15 degree steering from the
[0078]
FIG. 13 shows a first example of the parallel parking mode in the case of parallel parking in the left parking space P displayed on the screen of the monitor 11a when the
[0079]
On the other hand, when the
[0080]
Next, the backward movement of the
[0081]
Next, when the vehicle is moved backward from the position B while the steering angle is maintained at 15 degrees, the expected
[0082]
FIG. 14A shows a display example of the screen of the monitor 11a after retreating from the position B. FIG. In FIG. 14A, the roadside parking
[0083]
As shown in the modified example of FIG. 14B, the road shoulder parallel tangent of the above-mentioned outside predicted course locus may be displayed on the screen in a straight line as the roadside parking
[0084]
When the driver confirms that the roadside parking
[0085]
Next, the vehicle is steered at position C. This is done by the driver fully steering in the opposite direction. Corresponding to the pulse signal S2 indicating the maximum angle from the
[0086]
FIG. 15 shows an example of the screen of the monitor 11a at the position C in the parallel parking mode, in which an expected
[0087]
Next, the driver confirms that full steering is maintained, and then confirms the display of the screen of the monitor 11a. When the predicted
[0088]
Next, the vehicle is stopped at position D as shown in FIG. This position D is a position where the vehicle is parallel to the parking space, and the driver retreats the
[0089]
Finally, the parallel parking mode is canceled by releasing the reverse gear.
[0090]
Thus, according to the first embodiment of the present invention, the space necessary for moving the vehicle for parallel parking or parallel parking is the
[0091]
(Second Embodiment)
Next, a second embodiment of the present invention will be described with reference to FIGS. In the second embodiment, the parking assistance apparatus has the same configuration as the block diagram shown in FIG. 1 in the first embodiment, but the
[0092]
In addition, instead of the side space line pattern data, the
[0093]
Next, a specific example of the operation in the parallel parking mode in the second embodiment of the parking assistance apparatus having the above-described configuration will be described in detail. 17 and 18 are diagrams for explaining a specific parking assist operation in the parallel parking mode, and will be described below with reference to these drawings.
[0094]
Normally, the CPU 3a operates the navigation function by the navigation device 15, and uses the monitor 11a and the speaker 11b to display route guidance from the departure place to the destination, the current position of the host vehicle, and voice guidance. .
[0095]
Therefore, as shown in FIG. 17, first, the
[0096]
When the parallel
[0097]
In FIG. 17, the
[0098]
FIG. 19 shows an example in which the side space line and the front and rear marker lines are displayed on the screen of the monitor 11 a installed in the vicinity of the driver's seat of the
[0099]
The driver can see the
[0100]
That is, on the screen shown in FIG. 19, a partition boundary line with the parking frame next to the parking space P for which parking is desired, that is, the parking frame in which the parked
[0101]
The range that can be adjusted on the screen is limited, but when adjusting the display on the screen using key input means, etc., the expected trajectory pattern leading to the parking space P changes. It is necessary to read the locus pattern from the
[0102]
If the initial position A of the
[0103]
As shown in FIG. 18, the driver steers in the direction opposite to the direction in which the
[0104]
In accordance with the parking operation guide, the driver stops the
[0105]
In addition, in the operation after the position B, in addition to the
[0106]
Further, as shown in FIG. 20, the front and
[0107]
Next, a specific example of the operation in the parallel parking mode in the second embodiment of the parking assistance device having the above-described configuration will be described in detail. FIGS. 21 and 22 are diagrams for explaining a specific parking assist operation in the parallel parking mode, and will be described below with reference to these drawings.
[0108]
Normally, the CPU 3a operates the navigation function by the navigation device 15, and uses the monitor 11a and the speaker 11b to display route guidance from the departure place to the destination, the current position of the host vehicle, and voice guidance. .
[0109]
Therefore, as shown in FIG. 21, first, the
[0110]
When the parallel parking start switch 9 is pressed, the CPU 3a stops the navigation function according to the input of the parallel parking start signal from the parallel
[0111]
The driver can see the
[0112]
That is, as shown in FIG. 21, the intersection of the side space line 108 and the front and
[0113]
The range that can be adjusted on the screen is limited, but when adjusting the display on the screen using key input means, etc., the expected trajectory pattern leading to the parking space P changes. It is necessary to read the locus pattern from the
[0114]
If the initial position A of the
[0115]
As shown in FIG. 22, the driver steers in the direction opposite to the direction in which the
[0116]
In accordance with the parking operation guide, the driver stops the
[0117]
In addition, in the operation after the position B, in addition to the
[0118]
Thus, according to the second embodiment of the present invention, the space necessary for moving the vehicle for parallel parking or parallel parking is the
[0119]
As described above, the embodiment of the present invention has been described. However, the present invention is not limited to this, and various modifications and applications are possible.
[0120]
For example, as the superimposing means, instead of the on-
[0121]
Further, in the second embodiment, the initial position A is determined by the side space line and the front and rear marker lines. However, as an alternative example, the
[0122]
In the second embodiment, the parking operation guide is performed by displaying a text message on the screen of the monitor 11a. However, the present invention is not limited to this, and the speaker 11b is configured to guide and output a voice message. Or both of them may be used in combination.
[0123]
As another example of the present invention, when displaying a side image of the
[0124]
As still another embodiment of the present invention, a camera of a type that can be mounted in the center of the front bumper of the vehicle and can monitor the left and right sides by one as the
[0125]
Further, as still another embodiment of the present invention, as shown in FIG. 25, a rear side camera (or a door camera) that captures an image of a rear side that is mounted obliquely rearward on a vehicle side surface or a door mirror is similarly used. Applicable.
[0126]
【The invention's effect】
According to the first aspect of the present invention, the judgment of the driver at the time of parking can be facilitated, and the operation burden on the driver can be reduced.
[0127]
According to invention of
[0128]
According to the third aspect of the present invention, safety can be ensured when steering is performed during parking.
[0129]
According to the fourth aspect of the present invention, safety can be confirmed when the vehicle is moved backward by steering the steering wheel during parallel parking.
[0130]
According to the fifth aspect of the present invention, safety can be confirmed when the steering is steered and the vehicle is moved backward during parallel parking.
[0131]
According to the sixth aspect of the present invention, safety can be confirmed when the vehicle is moved by steering the steering during parallel or parallel parking.
[0132]
According to the seventh aspect of the present invention, in addition to the parking support effect, the effect of knowing the jump length of the host vehicle at an intersection or the like can be expected.
[Brief description of the drawings]
FIG. 1 is a block diagram showing a first embodiment of a parking assistance apparatus according to the present invention.
FIGS. 2A and 2B are diagrams for explaining camera mounting positions in the parking assistance apparatus of FIG. 1;
FIG. 3 is a flowchart for explaining the operation of the parking assist device of FIG. 1;
FIG. 4 is a diagram for explaining a specific parking support operation in the parallel parking mode.
FIG. 5 is a diagram illustrating a specific parking assist operation in the parallel parking mode.
FIG. 6 shows an example of a monitor screen at position A in the parallel parking mode.
FIGS. 7A and 7B show an example of a monitor screen at position B in the parallel parking mode.
FIG. 8 is a parking assistance image diagram in a parallel parking mode.
FIG. 9 is a diagram for explaining a specific parking support operation in the parallel parking mode.
FIG. 10 is a diagram for explaining a specific parking assist operation in the parallel parking mode.
FIG. 11 is a diagram for explaining a specific parking assist operation in the parallel parking mode.
FIG. 12 is a diagram showing an example of a monitor screen at position A in the parallel parking mode.
FIG. 13 is a diagram showing an example of a monitor screen before the backward movement operation at the position B in the parallel parking mode.
FIGS. 14A and 14B are diagrams showing an example of a monitor screen after a backward movement at position B in the parallel parking mode.
FIG. 15 is a diagram showing an example of a monitor screen at a position C in the parallel parking mode.
FIG. 16 is a diagram for explaining a camera mounting position in the second embodiment of the parking assistance apparatus according to the present invention;
FIG. 17 is a diagram illustrating a specific parking support operation in the parallel parking mode.
FIG. 18 is a diagram illustrating a specific parking assist operation in the parallel parking mode.
FIG. 19 shows an example of a monitor screen at position A in the parallel parking mode.
FIG. 20 is a diagram for explaining a modified example of a specific parking assist operation in the parallel parking mode.
FIG. 21 is a diagram for explaining a specific parking assist operation in the parallel parking mode.
FIG. 22 is a diagram for explaining a specific parking assist operation in the parallel parking mode.
FIG. 23 is a diagram illustrating a modification of the second embodiment.
FIG. 24 is a diagram for explaining another embodiment of the present invention.
FIG. 25 is a diagram illustrating still another embodiment of the present invention.
[Explanation of symbols]
2 Camera (imaging means)
3 Microcomputer
4 Reverse detection sensor
5 Rudder angle sensor (steering angle detection means)
6 Running sensor
7 Yaw rate sensor
8 Parallel parking start switch
9 Parallel parking start switch
10 Parking area selection switch
11 Indicator
11a Monitor (display means)
11b Speaker
12 On-screen display controller (OSDC) (superimposing means)
13 Memory (memory means)
14 EEPROM
101 Expected course of rear wheel
102 Car width extension line
104 Standard parking position
108a, 108b Side space line
110 Expected course trajectory of the maximum turning section
112 Front and rear marker lines
113 Vehicle front end extension line
Claims (7)
車両の側方に車両から所定の間隔だけ離れたところに車両の前後方向と平行に引かれ、駐車時の車両移動に必要な側方スペースを表す側方スペース線を、上記撮像画像に重畳して上記表示手段に表示させる重畳手段を備えた
ことを特徴とする駐車支援装置。A parking assist device for assisting when a vehicle is parked by displaying a captured image around the vehicle imaged by an imaging means mounted on the vehicle on a display means in the vehicle,
A lateral space line that is drawn parallel to the vehicle front-rear direction at a predetermined distance from the vehicle to the side of the vehicle and that represents the side space necessary for vehicle movement during parking is superimposed on the captured image. A parking assist device comprising superimposing means for displaying on the display means.
ことを特徴とする請求項1記載の駐車支援装置。The predetermined distance is set to be larger than a distance between the vehicle and the tangent line when a tangent of an expected course locus of the maximum turning portion of the vehicle is parallel to a lateral space line. Parking assistance device.
ことを特徴とする請求項1または2記載の駐車支援装置。The parking assist device according to claim 1, wherein the maximum turning portion is a corner of a front end of a vehicle.
ことを特徴とする請求項1から3のいずれか1項に記載の駐車支援装置。The said superimposing means superimposes the said side space line and the expected course locus | trajectory of the rear-wheel of a vehicle on the said captured image at the time of parallel parking mode, and makes it display on the said display means. The parking assistance device according to any one of claims.
ことを特徴とする請求項1から3のいずれか1項に記載の駐車支援装置。In the parallel parking mode, the superimposing means superimposes the lateral space line and the predicted trajectory of the maximum turning portion of the vehicle after steering on the captured image and displays the superposed image on the display means. The parking assistance device according to any one of claims 1 to 3.
ことを特徴とする請求項1から3のいずれか1項に記載の駐車支援装置。4. The superimposing means superimposes the side space line and a front and rear marker line orthogonal to the side space line on the captured image and displays them on the display means. The parking assistance apparatus of Claim 1.
ことを特徴とする請求項6記載の駐車支援装置。The parking support device according to claim 6, wherein the front / rear marker line is a vehicle front end extension line extended from a front end of the host vehicle.
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2003077449A JP4061219B2 (en) | 2002-11-01 | 2003-03-20 | Parking assistance device |
| KR1020030076981A KR100552337B1 (en) | 2002-11-01 | 2003-10-31 | Parking support device |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2002319901 | 2002-11-01 | ||
| JP2003077449A JP4061219B2 (en) | 2002-11-01 | 2003-03-20 | Parking assistance device |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2004203365A true JP2004203365A (en) | 2004-07-22 |
| JP4061219B2 JP4061219B2 (en) | 2008-03-12 |
Family
ID=32828304
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2003077449A Expired - Fee Related JP4061219B2 (en) | 2002-11-01 | 2003-03-20 | Parking assistance device |
Country Status (2)
| Country | Link |
|---|---|
| JP (1) | JP4061219B2 (en) |
| KR (1) | KR100552337B1 (en) |
Cited By (21)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2006001301A (en) * | 2004-06-15 | 2006-01-05 | Nissan Motor Co Ltd | Parallel parking support device, and parallel parking method |
| JP2006176041A (en) * | 2004-12-24 | 2006-07-06 | Matsushita Electric Ind Co Ltd | Operation assisting device |
| JP2006221536A (en) * | 2005-02-14 | 2006-08-24 | Denso Corp | Display device for vehicle |
| JP2006298208A (en) * | 2005-04-21 | 2006-11-02 | Aisin Aw Co Ltd | Parking support method and parking support device |
| JP2007106194A (en) * | 2005-10-12 | 2007-04-26 | Nissan Motor Co Ltd | Parking assisting device and parking assisting method |
| JP2007118922A (en) * | 2005-09-27 | 2007-05-17 | Clarion Co Ltd | Vehicular reverse operation assisting device |
| JP2007302065A (en) * | 2006-05-09 | 2007-11-22 | Toyota Motor Corp | Parking assist device |
| JP2008114628A (en) * | 2006-11-01 | 2008-05-22 | Suzuki Motor Corp | Parking support system |
| JP2009502646A (en) * | 2005-08-02 | 2009-01-29 | ルノー・エス・アー・エス | Real-time parking support method for automobile and corresponding device |
| US7515067B2 (en) | 2005-03-28 | 2009-04-07 | Clarion Co., Ltd. | Parking assist apparatus |
| JP2009278349A (en) * | 2008-05-14 | 2009-11-26 | Aisin Seiki Co Ltd | Perimeter monitoring device |
| WO2009147920A1 (en) * | 2008-06-03 | 2009-12-10 | アイシン精機株式会社 | Parking support device |
| JP2009298385A (en) * | 2008-06-17 | 2009-12-24 | Honda Motor Co Ltd | Device for assisting parking |
| JP2010018180A (en) * | 2008-07-11 | 2010-01-28 | Nissan Motor Co Ltd | Parking support device and parking support method |
| US7970535B2 (en) | 2006-07-04 | 2011-06-28 | Denso Corporation | Drive assist system |
| JP2011255783A (en) * | 2010-06-09 | 2011-12-22 | Nissan Motor Co Ltd | Device and method for assisting parking |
| WO2012032809A1 (en) * | 2010-09-06 | 2012-03-15 | アイシン精機株式会社 | Driving assistance device |
| JP2016060222A (en) * | 2014-09-12 | 2016-04-25 | アイシン精機株式会社 | Delivery support device, and delivery support metho |
| JP2019014585A (en) * | 2017-07-07 | 2019-01-31 | 株式会社タダノ | Crane truck |
| US10834552B1 (en) | 2019-06-25 | 2020-11-10 | International Business Machines Corporation | Intelligent vehicle pass-by information sharing |
| US11587434B2 (en) | 2019-06-25 | 2023-02-21 | International Business Machines Corporation | Intelligent vehicle pass-by information sharing |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4818816B2 (en) * | 2006-06-05 | 2011-11-16 | 富士通株式会社 | Parking assistance program and parking assistance device |
| KR100974704B1 (en) | 2007-04-30 | 2010-08-06 | 현대자동차주식회사 | Parking Guidance Method for Vehicle |
| KR101102367B1 (en) * | 2009-06-29 | 2012-01-05 | 김덕진 | hat with size control means |
-
2003
- 2003-03-20 JP JP2003077449A patent/JP4061219B2/en not_active Expired - Fee Related
- 2003-10-31 KR KR1020030076981A patent/KR100552337B1/en active IP Right Grant
Cited By (33)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2006001301A (en) * | 2004-06-15 | 2006-01-05 | Nissan Motor Co Ltd | Parallel parking support device, and parallel parking method |
| JP2006176041A (en) * | 2004-12-24 | 2006-07-06 | Matsushita Electric Ind Co Ltd | Operation assisting device |
| JP2006221536A (en) * | 2005-02-14 | 2006-08-24 | Denso Corp | Display device for vehicle |
| US7515067B2 (en) | 2005-03-28 | 2009-04-07 | Clarion Co., Ltd. | Parking assist apparatus |
| JP2006298208A (en) * | 2005-04-21 | 2006-11-02 | Aisin Aw Co Ltd | Parking support method and parking support device |
| JP4561456B2 (en) * | 2005-04-21 | 2010-10-13 | アイシン・エィ・ダブリュ株式会社 | Parking support method and parking support device |
| KR101389417B1 (en) | 2005-08-02 | 2014-04-25 | 르노 에스.아.에스. | Method for real-time parking assistance for a motor vehicle, and corresponding device |
| JP2009502646A (en) * | 2005-08-02 | 2009-01-29 | ルノー・エス・アー・エス | Real-time parking support method for automobile and corresponding device |
| JP4912402B2 (en) * | 2005-08-02 | 2012-04-11 | ルノー・エス・アー・エス | Real-time parking support method for automobile and corresponding device |
| JP2007118922A (en) * | 2005-09-27 | 2007-05-17 | Clarion Co Ltd | Vehicular reverse operation assisting device |
| JP2007106194A (en) * | 2005-10-12 | 2007-04-26 | Nissan Motor Co Ltd | Parking assisting device and parking assisting method |
| JP4677877B2 (en) * | 2005-10-12 | 2011-04-27 | 日産自動車株式会社 | Parking assistance device and parking assistance method |
| JP2007302065A (en) * | 2006-05-09 | 2007-11-22 | Toyota Motor Corp | Parking assist device |
| JP4613871B2 (en) * | 2006-05-09 | 2011-01-19 | トヨタ自動車株式会社 | Parking assistance device |
| US7970535B2 (en) | 2006-07-04 | 2011-06-28 | Denso Corporation | Drive assist system |
| JP2008114628A (en) * | 2006-11-01 | 2008-05-22 | Suzuki Motor Corp | Parking support system |
| JP4716139B2 (en) * | 2008-05-14 | 2011-07-06 | アイシン精機株式会社 | Perimeter monitoring device |
| JP2009278349A (en) * | 2008-05-14 | 2009-11-26 | Aisin Seiki Co Ltd | Perimeter monitoring device |
| US8907815B2 (en) | 2008-06-03 | 2014-12-09 | Aisin Kabushiki Kaisha | Parking support device |
| JP2009292228A (en) * | 2008-06-03 | 2009-12-17 | Aisin Seiki Co Ltd | Parking assistant device |
| WO2009147920A1 (en) * | 2008-06-03 | 2009-12-10 | アイシン精機株式会社 | Parking support device |
| JP2009298385A (en) * | 2008-06-17 | 2009-12-24 | Honda Motor Co Ltd | Device for assisting parking |
| JP2010018180A (en) * | 2008-07-11 | 2010-01-28 | Nissan Motor Co Ltd | Parking support device and parking support method |
| JP2011255783A (en) * | 2010-06-09 | 2011-12-22 | Nissan Motor Co Ltd | Device and method for assisting parking |
| WO2012032809A1 (en) * | 2010-09-06 | 2012-03-15 | アイシン精機株式会社 | Driving assistance device |
| CN103079902A (en) * | 2010-09-06 | 2013-05-01 | 爱信精机株式会社 | Driving assistance device |
| JP5561566B2 (en) * | 2010-09-06 | 2014-07-30 | アイシン精機株式会社 | Driving assistance device |
| US9294733B2 (en) | 2010-09-06 | 2016-03-22 | Aisin Seiki Kabushiki Kaisha | Driving assist apparatus |
| EP2614997A4 (en) * | 2010-09-06 | 2016-11-23 | Aisin Seiki | Driving assist apparatus |
| JP2016060222A (en) * | 2014-09-12 | 2016-04-25 | アイシン精機株式会社 | Delivery support device, and delivery support metho |
| JP2019014585A (en) * | 2017-07-07 | 2019-01-31 | 株式会社タダノ | Crane truck |
| US10834552B1 (en) | 2019-06-25 | 2020-11-10 | International Business Machines Corporation | Intelligent vehicle pass-by information sharing |
| US11587434B2 (en) | 2019-06-25 | 2023-02-21 | International Business Machines Corporation | Intelligent vehicle pass-by information sharing |
Also Published As
| Publication number | Publication date |
|---|---|
| JP4061219B2 (en) | 2008-03-12 |
| KR20040038880A (en) | 2004-05-08 |
| KR100552337B1 (en) | 2006-02-20 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4061219B2 (en) | Parking assistance device | |
| JP4466200B2 (en) | Parking assistance device | |
| JP3575364B2 (en) | Steering support device | |
| US6940423B2 (en) | Device for monitoring area around vehicle | |
| US7755511B2 (en) | Parking assistance apparatus | |
| EP2147826B1 (en) | Parking assistance apparatus and parking assistance method | |
| JP3803021B2 (en) | Driving assistance device | |
| JP4853712B2 (en) | Parking assistance device | |
| JP5429514B2 (en) | Parking assistance device | |
| EP1493632B1 (en) | Parking operation assisting system | |
| US20060287800A1 (en) | Driving support apparatus | |
| JP5380926B2 (en) | Parking assistance device and parking assistance method | |
| JP5446139B2 (en) | Parking assistance device and parking assistance method | |
| JP2011051586A (en) | Method of assisting driver | |
| JP2003300443A (en) | Parking assist system | |
| JP6318204B2 (en) | Parking exit support device | |
| JP2008037320A (en) | Parking assistant device, parking assistant method and parking assistant program | |
| KR100542805B1 (en) | Parking assisting device | |
| JP2009126353A (en) | Parking support device | |
| JP2005075015A (en) | Guidance assistance device | |
| JP3107088B1 (en) | Steering support device for parallel parking | |
| JP6373916B2 (en) | Parking exit support device | |
| JP6385991B2 (en) | Delivery support device | |
| JP2004106615A (en) | Parking support system | |
| JP3541792B2 (en) | Backing support device for parallel parking |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20050524 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20070213 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20070220 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20070410 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20071211 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20071221 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20101228 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 4061219 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20111228 Year of fee payment: 4 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20111228 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20121228 Year of fee payment: 5 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20121228 Year of fee payment: 5 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20131228 Year of fee payment: 6 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |