EP4549366A1 - Verfahren zum ausführen einer funktion - Google Patents
Verfahren zum ausführen einer funktion Download PDFInfo
- Publication number
- EP4549366A1 EP4549366A1 EP23206953.4A EP23206953A EP4549366A1 EP 4549366 A1 EP4549366 A1 EP 4549366A1 EP 23206953 A EP23206953 A EP 23206953A EP 4549366 A1 EP4549366 A1 EP 4549366A1
- Authority
- EP
- European Patent Office
- Prior art keywords
- lifting device
- arm system
- load
- movement
- predetermined
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images









Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66C—CRANES; LOAD-ENGAGING ELEMENTS OR DEVICES FOR CRANES, CAPSTANS, WINCHES, OR TACKLES
- B66C23/00—Cranes comprising essentially a beam, boom, or triangular structure acting as a cantilever and mounted for translatory of swinging movements in vertical or horizontal planes or a combination of such movements, e.g. jib-cranes, derricks, tower cranes
- B66C23/54—Cranes comprising essentially a beam, boom, or triangular structure acting as a cantilever and mounted for translatory of swinging movements in vertical or horizontal planes or a combination of such movements, e.g. jib-cranes, derricks, tower cranes with pneumatic or hydraulic motors, e.g. for actuating jib-cranes on tractors
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66C—CRANES; LOAD-ENGAGING ELEMENTS OR DEVICES FOR CRANES, CAPSTANS, WINCHES, OR TACKLES
- B66C13/00—Other constructional features or details
- B66C13/16—Applications of indicating, registering, or weighing devices
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66C—CRANES; LOAD-ENGAGING ELEMENTS OR DEVICES FOR CRANES, CAPSTANS, WINCHES, OR TACKLES
- B66C23/00—Cranes comprising essentially a beam, boom, or triangular structure acting as a cantilever and mounted for translatory of swinging movements in vertical or horizontal planes or a combination of such movements, e.g. jib-cranes, derricks, tower cranes
- B66C23/62—Constructional features or details
- B66C23/64—Jibs
- B66C23/70—Jibs constructed of sections adapted to be assembled to form jibs or various lengths
- B66C23/701—Jibs constructed of sections adapted to be assembled to form jibs or various lengths telescopic
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66C—CRANES; LOAD-ENGAGING ELEMENTS OR DEVICES FOR CRANES, CAPSTANS, WINCHES, OR TACKLES
- B66C23/00—Cranes comprising essentially a beam, boom, or triangular structure acting as a cantilever and mounted for translatory of swinging movements in vertical or horizontal planes or a combination of such movements, e.g. jib-cranes, derricks, tower cranes
- B66C23/88—Safety gear
- B66C23/90—Devices for indicating or limiting lifting moment
- B66C23/905—Devices for indicating or limiting lifting moment electrical
Definitions
- the invention relates to a method for carrying out a predetermined or predeterminable function of a lifting device according to the preamble of claim 1, a control for a lifting device for carrying out such a method and a lifting device with such a control.
- Methods for performing a predetermined or predeterminable function of a lifting device are known in the prior art, in which the lifting device must be brought into a predetermined position of an arm system of the lifting device. Methods are also known in which a predetermined or predeterminable function is performed in a state of the lifting device in which the lifting device is at a standstill.
- the methods known in the prior art pose additional requirements for a user, since the lifting device must be brought into a predetermined position of the arm system in order to perform a predetermined or predeterminable function, or the movement and thus the work with the lifting device must be interrupted because the lifting device must be at a standstill in order to perform a predetermined or predeterminable function. This is disadvantageously associated with increased demands on the operation of a lifting device and increased time expenditure for carrying out a lifting operation.
- the object of the invention is to provide an improved method for carrying out a predetermined or predeterminable function of a lifting device, a control for a lifting device for carrying out such a method and a lifting device with such a control.
- This object is achieved by a method for carrying out a predetermined or predeterminable function of a lifting device having the features of claim 1, a control for a lifting device for carrying out such a method and a lifting device having such a control.
- a method according to the invention can execute a predetermined or predeterminable function of a lifting device depending on at least one trigger interface.
- the method can preferably execute a predetermined or predeterminable function of a hydraulic lifting device.
- a lifting device may comprise an arm system with arms having a variable geometry, wherein, during a movement of the lifting device, the arms of the arm system can be moved relative to one another by at least one actuator along at least one degree of freedom.
- the arm system may, for example, be a crane column, a lifting arm, an articulated arm with at least one crane extension arm, at least one knuckle arm extension with at least one crane extension arm and/or a boom extension.
- a movement along a degree of freedom can be achieved by an actuator corresponding to the degree of freedom.
- an actuator corresponding to the degree of freedom.
- two pivotally mounted arms can be pivoted relative to each other by an actuator.
- Two displaceably mounted arms can be displaced relative to each other by an actuator, for example.
- Actuators for moving the lifting device and/or an arm system of the lifting device can be electrical and/or hydraulic.
- the degrees of freedom of the arm system can generally include angles between the arms of the arm system and the lengths of adjustable arms.
- the arm system can exhibit a degree of freedom of rotation through a rotatable mounting in a base.
- Values of degrees of freedom of movement can be detected by suitable sensors, such as angle sensors, position sensors for lengths of length-adjustable arms and/or length-adjustable actuators, and can be fed to a control of the lifting device in the form of at least one sensor signal.
- suitable sensors such as angle sensors, position sensors for lengths of length-adjustable arms and/or length-adjustable actuators
- the lifting device can be controlled by controlling actuators through control commands issued by the controller. Actuators of the lifting device can be specifically controlled based on operating commands from a user through corresponding control commands issued by the controller.
- the controller can have a suitable user interface or human-machine interface for issuing operating commands by a user.
- the controller can be remotely controlled using a remote control, which can have at least one user interface for issuing operating commands by a user. Based on the operating commands, the controller can generate control commands for controlling the lifting device.
- the controller can generally have at least one processing unit and at least one memory unit.
- the processing unit can be connected to the memory unit or can be connected to it.
- a user interface of a control and/or a remote control can be menu-driven and/or with an input mask in the form of user guidance with a graphical, character-oriented, or voice-oriented user interface.
- a specification of at least one parameter for a relative position of the at least one trigger interface relative to the lifting device can be done via the user interface, in particular input devices.
- the lifting device can have at least one working device that can be arranged on an arm system.
- a working device can basically be understood as an attachment that can be arranged on the arm system for manipulating objects or items, for example a load to be lifted.
- the arm system and the working device preferably the at least one movable part of the working device, can be controlled separately or jointly by appropriate control commands.
- the working device can be designed as a gripper with two or more gripper jaws or gripper shells that can be moved relative to one another.
- One working device can be designed in the form of a rotator for moving another working device relative to the arm system. The movements of the at least one working device can be driven by appropriate actuators.
- a movement of the lifting device can be effected by a substantially free control of actuators by issuing operating commands by a user, preferably via a suitable user interface or human-machine interface of a control system.
- individual actuators of the lifting device can be specifically controlled based on operating commands from a user by corresponding control commands, for example issued by a control system.
- a movement of the lifting device can also be effected in the form of a coordinate control (also called " boom tip control " ) of the The individual actuators of the arm system are controlled by the controller in such a way that the user controls the behavior of a crane tip of the arm system, instead of controlling the individual actuators themselves as usual.
- At least one parameter for a relative position of the at least one trigger interface relative to the lifting device can be specified.
- a specification can be made by at least one sensor signal from a sensor of the lifting device that is in data communication with a controller of the lifting device.
- a specification can be made by a user via at least one user interface of a controller of the lifting device.
- the at least one trigger interface can be created.
- At least one predetermined or predeterminable function of the lifting device can be executed.
- at least one predetermined or predeterminable function of the lifting device when a predetermined or predeterminable point of an arm system of the lifting device approaches the at least one trigger interface, at least one predetermined or predeterminable function of the lifting device can be executed.
- a predetermined or predeterminable point of an arm system of the lifting device passes through the at least one trigger interface, at least one predetermined or predeterminable function of the lifting device.
- the at least one trigger interface can be created by a control system of the lifting device.
- the approach and/or passage can be detected by the control system of the lifting device.
- at least one parameter for a relative position of the at least one trigger interface relative to the lifting device can be stored in a memory unit.
- the approach and/or passage can be detected using values of degrees of freedom of the movement of the arm system of the lifting device supplied to the control system.
- the at least one predetermined or predeterminable function of the lifting device can be executed by a controller of the lifting device. For example, upon detecting an approach of a person and/or a stepping through, a computing unit of the controller can execute commands that cause the controller to execute the at least one predetermined or predeterminable function.
- a predetermined or predeterminable point of an arm system of the lifting device can correspond to a tip of the arm system, a position of a working device arranged on the lifting device, in particular on the arm system, or an essentially freely selectable point of the arm system.
- Execution of at least one predetermined or predeterminable function of the lifting device upon approach of a predetermined or predeterminable point of an arm system of the lifting device to the at least one trigger interface and/or upon passage of a predetermined or predeterminable point of an arm system of the lifting device through the at least one trigger interface can be repeated essentially as often as desired.
- the execution can be repeated upon repeated loading of loads, preferably upon repeated loading of loads onto or from a loading space.
- a trigger interface can, in principle, be an essentially two-dimensional subset of three-dimensional space, a two-dimensional geometric figure, or a boundary surface of a three-dimensional body.
- a trigger interface can be at least partially flat and/or at least partially curved.
- a trigger interface can be limited in at least one spatial direction.
- a trigger interface can be limited in a vertical extension, a longitudinal extension, and/or a radius.
- a user of a lifting device By executing a function depending on a trigger interface, a user of a lifting device does not have to place it in a predetermined position of an arm system or interrupt the movement and thus the work with the lifting device.
- a position of an arm system of the lifting device and/or movement of the lifting device that is at least partially identical or approximate within a range can be approached and/or passed through with each repetition.
- a range can be related to an interval or intervals of values of the degrees of freedom of the movement of the arm system.
- a user of the lifting device does not have to move to a predetermined position of an arm system or interrupt the movement and thus the work with the lifting device when executing the function, as well as for a repeated execution of the function, but only has to approach a predetermined or predeterminable point of an arm system of the lifting device to the at least one trigger interface and/or pass through the at least one trigger interface with a predetermined or predeterminable point of an arm system of the lifting device.
- an interface between at least a part of an interior region of a loading area of the lifting device and at least a part of an exterior region of the loading area of the lifting device can be created
- at least one parameter for a relative position of the at least one trigger interface relative to the lifting device can be predetermined as a function of a position of a loading area of the lifting device provided for depositing loads lifted by the lifting device.
- a loading area of the lifting device can, for example, correspond to a loading area of a carrier vehicle of the lifting device and/or a loading area of at least one trailer.
- the at least one trailer can be positionable relative to the lifting device.
- a loading area can have a longitudinal extension along a longitudinal axis.
- a loading area can have a transverse extension along a transverse axis.
- a parameter for a relative position of the at least one trigger interface relative to the lifting device can be specified, for example, in the form of an angular position of a longitudinal axis of a loading area and/or a transverse axis of a loading area relative to a predetermined or predeterminable spatial direction.
- a predetermined or The predefined spatial direction can be related to the lifting device.
- a predefined spatial direction can correspond to a longitudinal axis of a carrier vehicle of the lifting device or be related to it.
- At least one parameter for a relative position of the at least one trigger interface relative to the lifting device can be specified as a function of the position of a loading area by at least one sensor signal from a sensor of the lifting device that is in data communication with a controller of the lifting device.
- An angular position of a longitudinal axis of a loading area and/or a transverse axis of a loading area relative to a predetermined or predeterminable spatial direction can be detected.
- an angular position of a longitudinal axis of a loading area relative to a longitudinal axis of a carrier vehicle of the lifting device can be detected and specified as a parameter.
- a parameter can be specified as a function of the position of a loading area by a user via at least one user interface of a controller of the lifting device.
- An angular position of a longitudinal axis of a loading area relative to a longitudinal axis of a carrier vehicle of the lifting device can be specified by a user via at least one user interface of a controller of the lifting device, for example, by entering an angular position into an input mask of the user interface.
- a function for determining at least one load value of a load lifted by the hydraulic lifting device can be carried out during the approach and/or the passage.
- a load value may be a unit value for the mass of a load lifted by the hydraulic lifting device.
- a load value determined using the method can be displayed to a user.
- the display can be in the form of a user-perceptible, particularly visual and/or acoustic, indication of the at least one load value for the lifted load.
- determining at least one load value for example, the sum of a load lifted during operation of a lifting device can be determined.
- Determining at least one load value can generally be performed continuously, for example, at a certain clock frequency.
- a clock frequency can specify how often a determination is made within a certain time interval.
- Assigning a load value to a lifted load can be done by executing the function upon approach and/or passing through.
- a function in the form of determining at least one load value of a load lifted by the hydraulic lifting device as a function of approaching and/or passing through a trigger interface advantageous states of a position and/or movement of the lifting device for determining at least one load value can be created.
- a function when approaching and/or passing through a predetermined or predeterminable point of an arm system of the lifting device to and/or through the at least one trigger interface, a The position of an arm system of the lifting device and/or movement of the lifting device can be approached and/or passed through.
- a user of the lifting device does not have to move to a predetermined position of an arm system or interrupt the movement and thus the work with the lifting device, but only has to approach a predetermined or predeterminable point of an arm system of the lifting device to the at least one trigger interface and/or pass through the at least one trigger interface with a predetermined or predeterminable point of an arm system of the lifting device.
- a predetermined or predeterminable point of an arm system of the lifting device can be repeatedly approached and/or passed through the at least one triggering interface.
- a position of an arm system of the lifting device and/or movement of the lifting device that is at least partially identical or approximate within a range can be approached and/or passed through.
- the at least one load value determined during each repetition can thus be determined for positions of an arm system of the lifting device and/or movements of an arm system of the lifting device that are at least partially identical or approximate within a range.
- a movement of an arm system of the hydraulic lifting device can take place along at least one degree of freedom of movement of the arm system with a lifted load.
- an essentially freely selectable movement can occur along at least one degree of freedom of the movement of the arm system.
- At least one determination of the dynamic load moments of the arms of the arm system prevailing during the movement can be carried out, whereby at least one load value for the lifted load can be determined by taking into account the dynamic load moments.
- Dynamic load moments can be caused by loads on the arms of the arm system occurring during a movement of the arm system due to their inherent masses and their outsourcing, as well as by the mass or masses of a lifted load and their outsourcing.
- a bearing arrangement can be provided, for example, by a horizontal or radial distance from a vertical axis of an arm system, preferably a vertical pivot axis of a bearing arrangement of an arm system.
- bearing friction of bearing points of arms of an arm system can have a lesser influence on the determination of dynamic load moments than with a static measurement at standstill.
- At least one determination of the dynamic load moments prevailing during the movement due to the dead masses of the arms of the arm system is carried out, whereby at least one load value can be determined by taking the dynamic load moments into account.
- a load value can be determined as a reference value for an unloaded lifting device.
- the at least one load value can be recorded in a load value sequence.
- a repeated determination of at least one load value of a load lifted by the hydraulic lifting device can be carried out, where the repeatedly determined load value can be recorded in a load value sequence.
- the load value sequence can correspond to a chronologically ordered set of recorded load values.
- a recording of at least one load value in a load value sequence can be performed continuously, for example, at a certain clock frequency.
- a clock frequency can specify how often a recording occurs within a certain time interval.
- a recording of at least one load value in a load value sequence can be performed during a movement of the lifting device with a lifted load.
- a recording of at least one load value in a load value sequence can be performed during a movement of the lifting device with the lifting device unloaded.
- a determination of the at least one load value and a recording of the at least one load value in a load value sequence can in principle take place during the entire operation of a lifting device.
- a determination of the at least one load value and a recording of the at least one load value in a load value sequence can be carried out continuously during substantially the entire duration of a movement of an arm system.
- At least one recorded load value can be selected from the load value sequence.
- At least one load value that was determined during the approach and/or passage can be selected from the load value sequence.
- a selection may be made of at least one recorded load value from the load value sequence which was determined within a time interval before, after or around the approach and/or the passage.
- the load value attributable to a load lifted by the hydraulic lifting device can be determined from the at least one selected load value.
- load values can be included in the determination which were determined for positions of an arm system of the lifting device and/or movements of an arm system of the lifting device which are at least partially identical or approximate within a range.
- load values can be selected, for example, which were determined during approach and/or passing through.
- the load value can be determined from an arithmetic mean of the at least one selected load value.
- the load value can be determined from a weighted arithmetic mean, wherein weighting can be performed according to at least one specific selection criterion.
- a movement of an arm system of the hydraulic lifting device can take place along at least one degree of freedom of the movement of the arm system, wherein in at least one time interval during the movement of the arm system at least one detection of the values prevailing in the at least one time interval of at least one of the degrees of freedom of the movement of the arm system and at least one detection of at least one force acting on the arm system in the at least one time interval can take place.
- Suitable sensors can be provided to detect at least one force.
- a recording of prevailing values of at least one of the degrees of freedom of the movement of the arm system and a recording of at least one force acting on the arm system can be carried out in order to determine the dynamic loading moments of the arms of the arm system prevailing during the movement.
- a selection of at least one recorded load value from the load value sequence and/or a weighting may include at least one of the following selection criteria: A selection can be made depending on a minimum duration and/or a maximum duration for at least one time interval.
- a selection can be made depending on a specification of a time interval through an interaction by a user, for example via at least one user interface of a control of the lifting device.
- a selection can be made depending on a minimum value and/or a maximum value and/or an interval for the recorded values of at least one of the degrees of freedom of movement of the arm system. This allows load values to be selected that are at least partially identical or approximate within a range for positions of an arm system of the lifting device and/or movements of an arm system of the lifting device.
- a selection can be made based on a minimum value and/or a maximum value and/or an interval for the at least one detected force. This allows load values to be selected that were determined when the lifting device was loaded. Load values that lie within technically plausible limits can also be selected, for example, to rule out false signals from sensors.
- a selection can be made depending on a minimum value and/or a maximum value and/or an interval for a rate of change of the detected values of at least one of the degrees of freedom of the arm system's movement. This allows load values to be selected that were determined during a movement along at least one degree of freedom of the arm system that is at least partially substantially uniform.
- a selection can be made depending on a minimum value and/or a maximum value and/or an interval for a rate of change of the at least one detected force. This allows load values to be selected that were determined during a substantially uniform movement along at least one degree of freedom of the arm system, at least in sections.
- the at least one parameter can be specified via at least one user interface of the control system of the lifting device by issuing operating commands for a movement of an arm system having a plurality of degrees of freedom of movement with a plurality of arms along at least one of the degrees of freedom.
- at least one point of the at least one trigger interface can be specified by a user by positioning a predetermined or predefinable point of the arm system of the lifting device by issuing operating commands for a movement of the arm system.
- at least a height, a longitudinal extent, an inclination, a center point or a spatial coordinate of a point of the at least one trigger interface can be specified.
- Several parameters of the at least one trigger interface can be specified.
- the at least one parameter can be specified via at least one user interface of the control system of the lifting device by a user entering at least one distance value and/or an angle value for a relative position of the at least one trigger interface relative to the lifting device.
- At least one height, a longitudinal extent, an inclination, a center point, or a spatial coordinate of a point of the at least one trigger interface can also be specified. Multiple parameters of the at least one trigger interface can be specified.
- the specification of the at least one parameter is carried out by issuing operating commands, a determination of at least one value of the at least one parameter that can be processed by the controller and at least one sensor signal that can be detected by a controller of the lifting device from at least one sensor arranged or that can be arranged on the lifting device can be carried out.
- Sensors arranged or arrangeable on the lifting device may generally include angle sensors, length sensors, position sensors, and/or optical sensors such as infrared sensors, ultrasonic sensors, and/or a camera.
- Execution of the at least one predetermined or predeterminable function of the lifting device upon approaching the at least one triggering interface can occur within a predetermined or predeterminable distance from a predetermined or predeterminable point of the arm system of the lifting device.
- a specification can be made via at least one user interface of the control system of the lifting device, for example, by entering at least one distance value.
- Protection is also sought for a control system for a lifting device which comprises means for carrying out the method described above.
- the control can be configured to specify at least one parameter for a relative position of the at least one trigger interface relative to the lifting device by at least one sensor signal of a sensor of the lifting device that is in data communication with a control of the lifting device and/or via at least one user interface of a control of the lifting device by a user.
- the controller may be configured to create the at least one trigger interface depending on the at least one parameter.
- the controller can be configured to execute at least one predetermined or predeterminable function of the lifting device when a predetermined or predeterminable point of an arm system of the lifting device approaches the at least one trigger interface and/or when a predetermined or predeterminable point of an arm system of the lifting device passes through the at least one trigger interface.
- a computer program product may comprise instructions which cause the previously described controller configured to carry out the method, optionally in an arrangement with a lifting device preferably equipped with corresponding sensors, to carry out a method as described above.
- Instructions of a computer program product can, for example, be stored in at least one memory unit of the controller and executed by at least one computing unit of the controller.
- the lifting device can be designed as a loading crane or a timber crane.
- the lifting device can be designed as a hydraulic crane.
- the lifting device can be arranged on a carrier vehicle to form a vehicle with a lifting device.
- the carrier vehicle can have a loading area for cargo.
- the carrier vehicle can be arranged with at least one trailer having a loading area, which can be positioned relative to the lifting device.
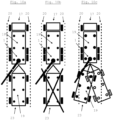
- FIGS. 1 to 3 show schematically embodiments of a process for executing a predetermined or predeterminable function.
- Figure 4 shows an embodiment of a lifting device 1 with a controller 11 having a user interface 21 and a lifted load 3, wherein the degrees of freedom w, k1, k2, s1, s2, a of the movement of the arm system 2 having a plurality of arms 4, 5, 6, 7, 8, 9 and a trigger interface 20 positioned relative to the lifting device are illustrated.
- Figure 5 shows a further schematic representation of a lifting device 1.
- the Figures 6a to 6c show a schematic representation of a movement of a lifting device 1.
- Figure 7 shows an embodiment of a vehicle 17 with a rear-mounted lifting device 1 with a loading area 19.
- the Figures 8a and 8b show schematic views of different arrangements of a vehicle 17 with a Lifting device 1 and a trailer 23 with a specification of at least one parameter for a trigger interface 20.
- the Figures 9a and 9b show schematic views of different arrangements of a vehicle 17 with a lifting device 1 and a trailer 23 with a specification of at least one parameter for a trigger interface 20.
- the Figures 10a to 10c schematic views of user interface options 21.
- Figure 1 shows schematically a sequence of an embodiment of a method for carrying out a predetermined or predeterminable function of a lifting device 1 in dependence on at least one trigger interface 20.
- a specification i of at least one parameter for a relative position of the at least one trigger interface 20 relative to the lifting device 1 can be made by at least one sensor signal of a sensor of the lifting device 1 that is in data communication with a controller 11 of the lifting device 1 and/or a specification via at least one user interface 21 of a controller 11 of the lifting device 1 by a user.
- At least one trigger interface 20 can be created.
- the specification of at least one parameter and the corresponding creation of at least one, optionally additional, trigger interface 20 can be repeated. Multiple trigger interfaces 20 can also be created using parameters.
- FIG. 2 an embodiment of the method is shown in which, during the approach and/or the passing through, a function for determining at least one load value m1, m2, m3 of a load 3 lifted by the hydraulic lifting device 1 is carried out.
- a movement of an arm system 2 of the hydraulic lifting device 1 can take place along at least one degree of freedom w, k1, k2, s1, s2, a of the movement of the arm system 2 with a lifted load e, wherein during the movement of the arm system 2 at least one determination of the dynamic load moments of the arms 4, 5, 6, 7, 8, 9 of the arm system 2 prevailing during the movement takes place, wherein taking into account the dynamic load moments at least one load value m1, m2, m3 for the lifted load 3 can be determined.
- At least one load value m1, m2, m3 can be continuously determined for the lifted load 3.
- a load value m1, m2, m3 can be assigned to a lifted load 3 by executing the function iii.
- a recording iv of the at least one load value m1, m2, m3 in a load value sequence (m1, m2, m3) can be carried out.
- a selection v of at least one recorded load value m1, m2, m3 from the load value sequence (m2, m3) can be carried out and an adjusted load value m can be determined vi from the at least one selected load value m1, m2, m3.
- FIG 4 an embodiment of a lifting device 1 with a controller 11 and sensors arranged on the arm system 2 of the lifting device 1 is shown.
- the arm system 2 of the lifting device 1 comprises a crane column 5 pivotably mounted in a base 4, a lifting arm 6 pivotably mounted thereon, and an articulated arm 7 pivotably mounted thereon.
- the lifting arm 6 is arranged at a first articulation angle k1 on the crane column 5, and the articulated arm 7 is arranged at a second articulation angle k2 on the lifting arm 6.
- Actuators 14, 15 are provided for pivoting the lifting arm 6 and the articulated arm 7. provided.
- the articulated boom 7 has two extension arms 8, 9, by means of which the length of the articulated boom 7 can be changed.
- a freely suspended working device 10 in the form of a grab is arranged at the crane tip, which in the embodiment shown is formed by the free end of the articulated boom 7.
- the tip 18 of the articulated arm 7 is specified as a point P of the arm system 2 related to the approach to and/or passage through the trigger interface 20.
- a point on the working device 10 or a point along the arm system 2 can also be specified.
- the sensor system of the lifting device 1 comprises a sensor d4 for detecting a pivoting position w of the crane column 5 relative to the base 4, a sensor d1 for detecting the first articulation angle k1, a sensor d2 for detecting the second articulation angle k2, a thrust position sensor 11 for detecting the thrust position s1 of the first thrust arm 8 and a second thrust position sensor 12 for detecting the thrust position s2 of the second thrust arm 9.
- the working device 3 arranged on the lifting device 1 and designed as a gripper has a sensor d3 for detecting the opening angle a.
- Suitable sensors p1, p2, such as pressure sensors or power sensors, can be provided to detect at least one operating parameter of the actuators 14, 15, with which forces acting on the actuators can be detected.
- the sensors installed on the lifting device 1 can detect the geometry of the arm system 2.
- the controller 11 can have signal inputs for supplying sensor signals via signal lines of the sensors and signal outputs for outputting control commands at least to the actuators 14, 15.
- the controller 11 has a computing unit 11 and a memory unit 13.
- the controller has a user interface 21, which is suitable for specifying at least one parameter for a relative position of the at least one trigger interface 20 relative to the lifting device 1.
- the user interface 21 can be connected to the controller 11 and/or a remote control 22 of the controller 11 and can be menu-driven and/or have an input mask in the form of user guidance with a graphical, character-oriented, or voice-oriented user interface.
- a specification of at least one parameter for a relative position of the at least one trigger interface 20 relative to the lifting device 1 can be made via the user interface 21, in particular input means.
- a specification i of at least one parameter via at least one user interface 21 of the control 11 of the lifting device 1 can in this embodiment be carried out by entering at least one distance value D and/or a Angle value N for a relative position of the at least one trigger interface 20 relative to the lifting device 1.
- a specification i of at least one parameter of the at least one trigger interface 20 can also be carried out as in the Figures 8a, 8b , 9a, 9b shown.
- Execution iii of the at least one predetermined or predeterminable function of the lifting device 1 upon approach to the at least one trigger interface 20 can take place within a predetermined or predeterminable distance x of a predetermined or predeterminable point P of the arm system 2 of the lifting device 1.
- a predetermined or predeterminable distance x is shown by way of example in the Figures 4 , 6c , 9a and 9b shown.
- FIG 5 A further schematic representation of a lifting device 1 is shown.
- the design essentially corresponds to that of the Figure 4 , wherein the articulated arm 7 is formed from two push arms 7, 8 for simplified representation.
- Load moments acting on the arm system 2 can be caused by loads on the arms 4, 5, 6, 7, 8, 9 of the arm system 2 due to their inherent masses and their outsourcing, as well as by the mass or masses of a lifted load 3 and their outsourcing.
- the loads can be added by the inherent masses and the outsourcing of the arms 4, 5, 6, 7, 8, 9 of the arm system 2 by the masses of the centers of gravity SP6, SP8, SP9 of the arms 4, 5, 6, 7, 8, 9, 6, 8, 9 and their offsets r6, r8, r9 contribute to the load.
- the dead masses of the centers of gravity SP15, SP10 of an actuator 15 and a work tool 10 and their offsets r15, r10 can be added to the load.
- the mass of the center of gravity SP3 of load 3 and its offset r3 can contribute to the load.
- an offset r3, r6, r8, r9, r10, r15 can be given by a horizontal or radial distance from a vertical pivot axis of a bearing of an arm system 2 and can be determined, for example, trigonometrically from known dimensions of arms 4, 5, 6, 7, 8, 9 of the arm system 2 and sensors installed on the lifting device 2.
- the pivot axis of a bearing can run through the crane column 5.
- FIG. 6a, 6b, 6c is a schematic representation of a lifting movement of a lifting device 1 with a load 3 attached to it by a load rope 16.
- the design of the lifting device 1 can essentially be that of the Figures 4 or 5 are equivalent to.
- an exemplary movement i of the arm system 2 takes place along a degree of freedom w, k1, k2, s1, s2, a of the bending angle k2.
- a function for determining at least one load value m1, m2, m3 of a load 3 lifted by the hydraulic lifting device 1 can be executed.
- at least one load value m1, m2, m3 can be continuously determined for the lifted load 3, and upon approaching and/or passing through, a load value m1, m2, m3 can be assigned to a lifted load 3 by executing the function.
- a recording iv of the recorded load values m1, m2, m3 can be carried out in a load value sequence and, depending on at least one predetermined or predeterminable selection criterion, a selection v of at least one recorded load value m2, m3 from the load value sequence can be carried out.
- Figure 6c a selection v of at least one recorded load value m3 from the load value sequence.
- Figure 6a a force detected by sensor p1 is below a minimum value. This can be used to detect, for example, that load 3 has not yet been lifted and the Figure 6a certain load value m1 is not representative of the load mass.
- An adjusted load value m can subsequently be determined vi from the selected load values m2, m3.
- the determination vi of the adjusted load value m can be carried out from a weighted arithmetic mean, in which the load value m3 selected depending on the approach and/or penetration is given greater weight.
- FIG. 7 An embodiment of a vehicle 17 is shown with a lifting device 1 arranged at the rear along a longitudinal axis of the vehicle 17, with an arm system 2.
- the vehicle 17 with the lifting device 1 can be arranged as shown schematically in the Figures 8a and 8b shown with at least one trailer 23 having a loading area 19, wherein the trailer 23 can be positioned relative to the lifting device 1 as shown.
- the lifting device 1 can have a sensor d5.
- an interface when creating a trigger interface 20, an interface can be created between at least part of an interior region of a loading area 19 of the lifting device 1 and at least part of an exterior region of the loading area 19 of the lifting device 1.
- At least one parameter for a relative position of the at least one trigger interface 20 relative to the lifting device 1 can be specified as a function of a position of a loading area 19 of the lifting device 1.
- a specification i of at least one parameter for a relative position of the at least one trigger interface 20 relative to the lifting device 1 can be Figure 8a by a sensor d5 for detecting an angular position of a trailer 23 relative to the vehicle 17.
- This can be done by moving the arm system 2.
- trigger boundary surface 20 for a loading area 19 of the lifting device 1 and a trigger boundary surface 20 for a loading area 19 of a trailer 23 can be specified by a movement of the arm system 2, wherein the positions of the arm system 2 used for this purpose are shown superimposed.
- FIG. 9a and 9b illustrates a specification i of a parameter depending on the position of a loading area 19 via at least one user interface of a controller 11 of the lifting device 1 by a user.
- a center point M and a radius R of a circular, in particular circular-cylindrical, trigger boundary surface 20 for a loading area 19 of a trailer 23 can be specified by a movement of the arm system 2, wherein the positions of the arm system 2 used for this purpose are shown superimposed.
- a movement of the arm system 2 an angle value N of a
- the angular position of a trigger interface 20 for a loading area 19 of a trailer 23 can be specified.
- Parameters that can be processed by the controller 2 for the relative position of the at least one trigger interface 20 relative to the lifting device 1 can be provided by sensors of the lifting device 1.
- a user interface 21 of a controller 11 and/or a remote control 22 of the controller 11 can be designed character-oriented.
- the representations in the Figures 10a, 10b and 10c may represent selection options on a display of the user interface 21 that a user can select in the case of a substantially rectilinear arrangement of a vehicle 17 with a lifting device 1 and a trailer 23 having a loading area 19, in the absence of a trailer 23, or in an arrangement deviating from a rectilinear arrangement.
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Control And Safety Of Cranes (AREA)
- Forklifts And Lifting Vehicles (AREA)
Abstract
Verfahren zum Ausführen einer vorbestimmten oder vorbestimmbaren Funktion einer, vorzugsweise hydraulischen, Hebevorrichtung (1) in Abhängigkeiten zumindest einer Auslösergrenzfläche (20), wobei
- eine Vorgabe (i) zumindest eines Parameters (D, N, M, R) für eine Relativposition der zumindest einen Auslösergrenzfläche (20) relativ zu der Hebevorrichtung (1) durch zumindest ein Sensorsignal eines mit einer Steuerung (11) der Hebevorrichtung (1) in Datenkommunikation stehenden Sensors (d1, d2, d3, d4, d5, 11, 12, p1, p2) der Hebevorrichtung (1) erfolgt und/oder über zumindest eine Benutzerschnittstelle (21) einer Steuerung (11) der Hebevorrichtung (1) durch einen Benutzer erfolgt
- ein Erstellen (ii) der zumindest einen Auslösergrenzfläche (20) in Abhängigkeit des zumindest einen Parameters (D, N, M, R) erfolgt
- ein Ausführen (iii) zumindest einer vorbestimmten oder vorbestimmbaren Funktion der Hebevorrichtung (1) bei einer Annäherung eines vorgegebenen oder vorgebbaren Punktes (P) eines Armsystems (2) der Hebevorrichtung (1) an die zumindest eine Auslösergrenzfläche (20) und/oder bei einem Durchtreten eines vorgegebenen oder vorgebbaren Punktes (P) eines Armsystems (2) der Hebevorrichtung (1) durch die zumindest eine Auslösergrenzfläche (20) erfolgt.
- eine Vorgabe (i) zumindest eines Parameters (D, N, M, R) für eine Relativposition der zumindest einen Auslösergrenzfläche (20) relativ zu der Hebevorrichtung (1) durch zumindest ein Sensorsignal eines mit einer Steuerung (11) der Hebevorrichtung (1) in Datenkommunikation stehenden Sensors (d1, d2, d3, d4, d5, 11, 12, p1, p2) der Hebevorrichtung (1) erfolgt und/oder über zumindest eine Benutzerschnittstelle (21) einer Steuerung (11) der Hebevorrichtung (1) durch einen Benutzer erfolgt
- ein Erstellen (ii) der zumindest einen Auslösergrenzfläche (20) in Abhängigkeit des zumindest einen Parameters (D, N, M, R) erfolgt
- ein Ausführen (iii) zumindest einer vorbestimmten oder vorbestimmbaren Funktion der Hebevorrichtung (1) bei einer Annäherung eines vorgegebenen oder vorgebbaren Punktes (P) eines Armsystems (2) der Hebevorrichtung (1) an die zumindest eine Auslösergrenzfläche (20) und/oder bei einem Durchtreten eines vorgegebenen oder vorgebbaren Punktes (P) eines Armsystems (2) der Hebevorrichtung (1) durch die zumindest eine Auslösergrenzfläche (20) erfolgt.
Description
- Die Erfindung betrifft ein Verfahren zum Ausführen einer vorbestimmten oder vorbestimmbaren Funktion einer Hebevorrichtung gemäß dem Oberbegriff des Anspruchs 1, eine Steuerung für eine Hebevorrichtung zur Durchführung eines solchen Verfahrens und eine Hebevorrichtung mit einer solchen Steuerung.
- Im Stand der Technik sind Verfahren zum Ausführen einer vorbestimmten oder vorbestimmbaren Funktion einer Hebevorrichtung bekannt, bei welchen die Hebevorrichtung in eine vorgegebene Stellung eines Armsystems der Hebevorrichtung gebracht werden muss. Auch sind Verfahren bekannt, bei denen eine vorbestimmte oder vorbestimmbare Funktion in einem Zustand der Hebevorrichtung ausgeführt wird, in welchem sich die Hebevorrichtung im Stillstand befindet. Die im Stand der Technik bekannten Verfahren stellen für einen Benutzer zusätzliche Anforderungen dar, da die Hebevorrichtung zum Ausführen einer vorbestimmten oder vorbestimmbaren Funktion in eine vorgegebene Stellung des Armsystems gebracht werden muss oder die Bewegung und damit die Arbeit mit der Hebevorrichtung unterbrochen werden muss, da die Hebevorrichtung sich zum Ausführen einer vorbestimmten oder vorbestimmbaren Funktion im Stillstand befinden muss. Dies ist nachteilig mit erhöhten Anforderungen an die Bedienung einer Hebevorrichtung und erhöhtem Zeitaufwand zum Durchführen eines Hebevorgangs verbunden.
- Aufgabe der Erfindung ist es, ein verbessertes Verfahren zum Ausführen einer vorbestimmten oder vorbestimmbaren Funktion einer Hebevorrichtung, eine Steuerung für eine Hebevorrichtung zur Durchführung eines solchen Verfahrens und eine Hebevorrichtung mit einer solchen Steuerung anzugeben.
- Diese Aufgabe wird durch ein Verfahren zum Ausführen einer vorbestimmten oder vorbestimmbaren Funktion einer Hebevorrichtung mit den Merkmalen des Anspruchs 1, eine Steuerung für eine Hebevorrichtung zur Durchführung eines solchen Verfahrens und eine Hebevorrichtung mit einer solchen Steuerung gelöst.
- Vorteilhafte Ausführungen der Erfindung sind in den abhängigen Ansprüchen definiert.
- Ein erfindungsgemäßes Verfahren kann eine vorbestimmte oder vorbestimmbare Funktion einer Hebevorrichtung in Abhängigkeiten zumindest einer Auslösergrenzfläche ausführen. Das Verfahren kann vorzugsweise eine vorbestimmte oder vorbestimmbare Funktion einer hydraulischen Hebevorrichtung ausführen.
- Eine Hebevorrichtung kann ein Armsystem mit Armen mit einer veränderbaren Geometrie aufweisen, wobei bei einer Bewegung der Hebevorrichtung die Arme des Armsystem zueinander durch zumindest einen Aktuator entlang von zumindest einem Freiheitsgrad bewegbar sein können. Das Armsystem kann beispielsweise eine Kransäule, einen Hubarm, einen Knickarm mit zumindest einem Kranschubarm, zumindest eine Knickarmverlängerung mit zumindest einem Kranschubarm und/oder eine Auslegerverlängerung aufweisen.
- Eine Bewegung entlang eines Freiheitsgrades kann durch einen mit dem Freiheitsgrad korrespondierenden Aktuator erfolgen. Beispielsweise können zwei schwenkbar aneinander gelagerte Arme durch einen Aktuator relativ zueinander verschwenkt werden. Zwei verschiebbar zueinander gelagert Arme können beispielsweise durch einen Aktuator relativ zueinander verschoben werden.
- Aktuatoren zur Bewegung der Hebevorrichtung und/oder eines Armsystems der Hebevorrichtung können elektrisch und/oder hydraulisch ausgebildet sein.
- Die Freiheitsgrade des Armsystems können grundsätzlich Winkel von Armen des Armsystems zueinander und Längen von längenveränderbaren Armen umfassen. Das Armsystem kann durch eine drehbare Lagerung in einer Basis einen Freiheitsgrad der Rotation ausweisen.
- Werte von Freiheitsgraden der Bewegung können durch durch geeignete Sensoren, wie etwa Winkelsensoren, Positionsgebern für Längen von längenveränderbaren Armen und/oder längenveränderbaren Aktuatoren, erfassbar sein und in Form zumindest eines Sensorsignals einer Steuerung der Hebevorrichtung zuführbar sein.
- Eine Steuerung der Hebevorrichtung kann durch eine Ansteuerung von Aktuatoren durch von der Steuerung abgegebene Steuerbefehle erfolgen. Dabei können Aktuatoren der Hebevorrichtung gezielt auf Basis von Bedienbefehlen eines Benutzers durch entsprechende von der Steuerung ausgegebene Steuerbefehle angesteuert werden. Die Steuerung kann eine geeignete Benutzerschnittstelle oder Mensch-Maschine-Schnittstelle zur Abgabe von Bedienbefehlen durch einen Benutzer aufweisen.
- Die Steuerung kann mit einer Fernsteuerung fernbedienbar sein, wobei die Fernsteuerung zumindest eine Benutzerschnittstelle zur Abgabe von Bedienbefehlen durch einen Benutzer aufweisen kann. Auf Basis der Bedienbefehle können von der Steuerung Steuerbefehle für die Ansteuerung der Hebevorrichtung generiert werden.
- Die Steuerung kann grundsätzlich wenigstens eine Recheneinheit und wenigstens eine Speichereinheit aufweisen. Die Recheneinheit kann mit der Speichereinheit in einer Datenverbindung stehen oder in eine solche bringbar sein.
- Eine Benutzerschnittstelle einer Steuerung und/oder einer Fernsteuerung kann menügeführt und/oder mit einer Eingabemaske in Form einer Benutzerführung mit grafischer, zeichenorientierter oder sprachorientierter Benutzeroberfläche ausgeführt sein. Eine Vorgabe zumindest eines Parameters für eine Relativposition der zumindest einen Auslösergrenzfläche relativ zu der Hebevorrichtung kann über die Benutzerschnittstelle, insbesondere Eingabemittel, erfolgen.
- Die Hebevorrichtung kann zumindest ein an einem Armsystem anordenbares Arbeitsgerät aufweisen. Als Arbeitsgerät kann grundsätzlich ein am Armsystem anordenbares Anbauteil zur Manipulation von Objekten oder Gegenständen, beispielsweise einer anzuhebenden Last, verstanden werden. Das Armsystem und das Arbeitsgerät, vorzugsweise der zumindest eine bewegbare Teil des Arbeitsgeräts, können getrennt voneinander oder auch gemeinsam durch entsprechende Steuerbefehle angesteuert werden. In einer beispielhaften Ausführung kann das Arbeitsgerät als ein Greifer mit zwei oder mehreren relativ zueinander bewegbaren Greiferbacken oder Greiferschalen ausgebildet sein. Ein Arbeitsgerät kann in Form eines Rotators zur Bewegung eines weiteren Arbeitsgeräts relativ zum Armsystem ausgebildet sein. Die Bewegungen des zumindest einen Arbeitsgeräts können durch entsprechende Aktuatoren antreibbar sein.
- Eine Bewegung der Hebevorrichtung kann durch eine im Wesentlichen freie Ansteuerung von Aktuatoren durch Abgabe von Bedienbefehlen durch einen Benutzer, vorzugsweise über eine geeignete Benutzerschnittstelle oder Mensch-Maschine-Schnittstelle einer Steuerung, erfolgen. Dabei können beispielsweise einzelne Aktuatoren der Hebevorrichtung gezielt auf Basis von Bedienbefehlen eines Benutzers durch entsprechende, beispielsweise von einer Steuerung ausgegebene, Steuerbefehle angesteuert werden. Eine Bewegung der Hebevorrichtung kann auch in Form einer Koordinatensteuerung (auch "boom tip control" genannt) des Armsystems erfolgen. Dabei werden die einzelnen Aktuatoren des Armsystems von der Steuerung so angesteuert, dass der Benutzer das Verhalten einer Kranspitze des Armsystems steuert, anstatt wie gewöhnlich die einzelnen Aktuatoren selbst anzusteuern.
- Bei dem Verfahren kann eine Vorgabe zumindest eines Parameters für eine Relativposition der zumindest einen Auslösergrenzfläche relativ zu der Hebevorrichtung erfolgen. Eine Vorgabe kann durch zumindest ein Sensorsignal eines mit einer Steuerung der Hebevorrichtung in Datenkommunikation stehenden Sensors der Hebevorrichtung erfolgen. Alternativ oder in Kombination kann eine Vorgabe über zumindest eine Benutzerschnittstelle einer Steuerung der Hebevorrichtung durch einen Benutzer erfolgen.
- In Abhängigkeit des zumindest einen vorgegebenen Parameters kann ein Erstellen der zumindest einen Auslösergrenzfläche erfolgen.
- Mit einer Auslösergrenzfläche kann bei einer Annäherung eines vorgegebenen oder vorgebbaren Punktes eines Armsystems der Hebevorrichtung an die zumindest eine Auslösergrenzfläche ein Ausführen zumindest einer vorbestimmten oder vorbestimmbaren Funktion der Hebevorrichtung erfolgen. Alternativ oder in Kombination kann bei einem Durchtreten eines vorgegebenen oder vorgebbaren Punktes eines Armsystems der Hebevorrichtung durch die zumindest eine Auslösergrenzfläche ein Ausführen zumindest einer vorbestimmten oder vorbestimmbaren Funktion der Hebevorrichtung erfolgen.
- Ein Erstellen der zumindest einen Auslösergrenzfläche kann durch eine Steuerung der Hebevorrichtung erfolgen. Ebenso kann ein Erfassen des Annäherns und/oder des Durchtretens von der Steuerung der Hebevorrichtung erfolgen. Dabei kann beispielsweise zumindest ein Parameter für eine Relativposition der zumindest einen Auslösergrenzfläche relativ zu der Hebevorrichtung in einer Speichereinheit hinterlegbar sein. Mit der Steuerung zugeführten Werten von Freiheitsgraden der Bewegung des Armsystems der Hebevorrichtung kann ein Erfassen des Annäherns und/oder des Durchtretens erfolgen.
- Die zumindest eine vorbestimmte oder vorbestimmbare Funktion der Hebevorrichtung kann von einer Steuerung der Hebevorrichtung ausgeführt werden. Beispielsweise kann eine Recheneinheit der Steuerung bei Erkennung einer Annäherung eines und/oder eines Durchtretens Befehle ausführen, welche die Steuerung zur Ausführung der zumindest einen vorbestimmten oder vorbestimmbaren Funktion veranlassen.
- Ein vorgegebener oder vorgebbaren Punkt eines Armsystems der Hebevorrichtung kann einer Spitze des Armsystem, einer Position eines an der Hebevorrichtung, insbesondere am Armsystem, angeordneten Arbeitsgeräts oder einem im Wesentlichen frei wählbaren Punkt des Armsystems entsprechen.
- Ein Ausführen zumindest einer vorbestimmten oder vorbestimmbaren Funktion der Hebevorrichtung bei einer Annäherung eines vorgegebenen oder vorgebbaren Punktes eines Armsystems der Hebevorrichtung an die zumindest eine Auslösergrenzfläche und/oder bei einem Durchtreten eines vorgegebenen oder vorgebbaren Punktes eines Armsystems der Hebevorrichtung durch die zumindest eine Auslösergrenzfläche kann im Wesentlichen beliebig oft wiederholt werden. Beispielsweise kann eine Wiederholung der Ausführung bei einem wiederholten Verladen von Lasten erfolgen, vorzugsweise bei einem wiederholten Verladen von Lasten auf einen oder von einem Laderaum.
- Eine Auslösergrenzfläche kann grundsätzlich eine im Wesentlichen zweidimensionale Teilmenge des dreidimensionalen Raumes, eine zweidimensionale geometrische Figur oder eine Begrenzungsfläche eines dreidimensionalen Körpers sein. Eine Auslösergrenzfläche kann zumindest abschnittsweise flach und/oder zumindest abschnittsweise gekrümmt sein.
- Eine Auslösergrenzfläche kann in zumindest einer Raumrichtung beschränkt sein. Dabei kann eine Auslösergrenzfläche beispielweise in einer Höhenerstreckung, einer Längserstreckung und/oder einem Radius beschränkt sein.
- Durch eine Ausführung einer Funktion in Abhängigkeit einer Auslösergrenzfläche muss ein Benutzer einer Hebevorrichtung diese nicht in eine vorgegebene Stellung eines Armsystems bringen oder die Bewegung und damit die Arbeit mit der Hebevorrichtung unterbrechen.
- Bei einem wiederholten Annähern und/oder Durchtreten eines vorgegebenen oder vorgebbaren Punktes eines Armsystems der Hebevorrichtung an die und/oder durch die zumindest eine Auslösergrenzfläche kann bei jeder Wiederholung eine zumindest teilweise innerhalb eines Bereichs identische oder angenäherte Stellung eines Armsystems der Hebevorrichtung und/oder Bewegung der Hebevorrichtung angefahren und/oder durchlaufen werden. Eine Bereich kann auf ein Intervall oder auf Intervalle von Werten der Freiheitsgrade der Bewegung des Armsystems bezogen sein.
- Ein Benutzer der Hebevorrichtung muss ein Ausführen der Funktion, als auch für ein wiederholtes Ausführen der Funktion, keine vorgegebene Stellung eines Armsystems anfahren oder die Bewegung und damit die Arbeit mit der Hebevorrichtung unterbrechen, sondern lediglich einen vorgegebenen oder vorgebbaren Punktes eines Armsystems der Hebevorrichtung an die zumindest eine Auslösergrenzfläche annähern und/oder mit einem vorgegebenen oder vorgebbaren Punktes eines Armsystems der Hebevorrichtung durch die zumindest eine Auslösergrenzfläche durchtreten.
- In einer Ausführung kann bei dem Erstellen der zumindest einen Auslösergrenzfläche eine Grenzfläche zwischen zumindest einem Teil eines Innenbereichs eines Ladebereichs der Hebevorrichtung und zumindest eines Teils eines Außenbereichs des Ladebereichs der Hebevorrichtung erstellt werden. Dabei kann zumindest ein Parameter für eine Relativposition der zumindest einen Auslösergrenzfläche relativ zu der Hebevorrichtung in Abhängigkeit einer Position eines zur Ablage von durch die Hebevorrichtung gehobenes Ladegut vorgesehenen Ladebereichs der Hebevorrichtung vorgebbar sein.
- Ein Ladebereich der Hebevorrichtung kann beispielsweise einem Ladebereich eines Trägerfahrzeugs der Hebevorrichtung und/oder einem Ladebereich zumindest eines Anhängers entsprechen. Der zumindest eine Anhänger kann relativ zur Hebevorrichtung positionierbar sein. Ein Ladebereich kann entlang einer Längsachse eine Längserstreckung aufweisen. Ein Ladebereich kann entlang einer Querachse eine Quererstreckung aufweisen.
- Ein möglicher Parameter für eine Relativposition der zumindest einen Auslösergrenzfläche relativ zu der Hebevorrichtung kann in Abhängigkeit einer Längsachse eines Ladebereichs, und/oder einer Längserstreckung eines Ladebereichs, und/oder einer Querachse eines Ladebereichs, und/oder einer Quererstreckung eines Ladebereichs vorgegeben werden.
- Ein Parameter für eine Relativposition der zumindest einen Auslösergrenzfläche relativ zu der Hebevorrichtung kann beispielsweise in Form einer Winkelstellung einer Längsachse eines Ladebereichs und/oder einer Querachse eines Ladebereichs relativ zu einer vorgegebenen oder vorgebbaren Raumrichtung vorgegeben werden. Einer vorgegebenen oder vorgebbaren Raumrichtung kann dabei auf die Hebevorrichtung bezogen sein. Beispielsweise kann eine vorgegebene Raumrichtung einer Längsachse eines Trägerfahrzeugs der Hebevorrichtung entsprechen oder auf diese bezogen sein.
- Eine Vorgabe zumindest eines Parameters für eine Relativposition der zumindest einen Auslösergrenzfläche relativ zu der Hebevorrichtung in Abhängigkeit der Position eines Ladebereichs kann durch zumindest ein Sensorsignal eines mit einer Steuerung der Hebevorrichtung in Datenkommunikation stehenden Sensors der Hebevorrichtung erfolgen. Dabei kann eine Winkelstellung einer Längsachse eines Ladebereichs und/oder einer Querachse eines Ladebereichs relativ zu einer vorgegebenen oder vorgebbaren Raumrichtung erfasst werden. Beispielsweise kann eine Winkelstellung einer Längsachse eines Ladebereichs relativ zu einer Längsachse eines Trägerfahrzeugs der Hebevorrichtung erfasst werden und als ein Parameter vorgegeben werden. Alternativ oder in Kombination kann eine Vorgabe eines Parameters in Abhängigkeit der Position eines Ladebereichs über zumindest eine Benutzerschnittstelle einer Steuerung der Hebevorrichtung durch einen Benutzer erfolgen. Dabei kann eine Winkelstellung einer Längsachse eines Ladebereichs relativ zu einer Längsachse eines Trägerfahrzeugs der Hebevorrichtung über zumindest eine Benutzerschnittstelle einer Steuerung der Hebevorrichtung durch einen Benutzer vorgebbar sein, beispielsweise durch Eingabe einer Winkelstellung in eine Eingabemaske der Benutzerschnittstelle.
- In einer Ausführung des Verfahrens kann
- ein Abstellen einer Hebevorrichtung mit einem Ladebereich und/oder eines Anhängers mit einem Ladebereich zur Ablage und Aufnahme von Ladegut der hydraulischen Hebevorrichtung erfolgen
- eine Vorgabe eines zumindest eines Parameters für eine Relativposition der zumindest einen Auslösergrenzfläche zwischen zumindest einem Teil eines Innenbereichs zumindest eines Ladebereichs und zumindest eines Teils eines Außenbereichs zumindest eines Ladebereichs erfolgen
- ein Erstellen der zumindest einen Auslösergrenzfläche in Abhängigkeit des zumindest einen Parameters erfolgen
- ein Ausführen zumindest einer vorbestimmten oder vorbestimmbaren Funktion der Hebevorrichtung bei einer Annäherung eines vorgegebenen oder vorgebbaren Punktes eines Armsystems der Hebevorrichtung an die zumindest eine Auslösergrenzfläche und/oder bei einem Durchtreten eines vorgegebenen oder vorgebbaren Punktes eines Armsystems der Hebevorrichtung durch die zumindest eine Auslösergrenzfläche erfolgt.
- In einer vorteilhaften Ausführung des Verfahrens kann bei dem Annähern und/oder dem Durchtreten eine Funktion zur Bestimmung zumindest eines Lastwertes einer von der hydraulischen Hebevorrichtung angehobenen Last ausgeführt werden.
- Ein Lastwert kann ein mit einer Einheit behafteter Wert für die Masse einer von der hydraulischen Hebevorrichtung angehobenen Last sein.
- Ein mit dem Verfahren bestimmter Lastwert kann einem Benutzer angezeigt werden. Eine Anzeige kann in Form einer für einen Benutzer wahrnehmbaren, insbesondere optischen und/oder akustischen, Anzeige des zumindest einen Lastwerts für die angehobene Last erfolgen.
- Durch die ein Bestimmung zumindest eines Lastwerts kann beispielsweise die Summe einer im Betrieb einer Hebevorrichtung gehobenen Last bestimmt werden.
- Eine Bestimmen zumindest eines Lastwerts kann grundsätzlich fortlaufend erfolgen, beispielsweise mit einer gewissen Taktfrequenz. Eine Taktfrequenz kann angeben, wie oft eine Bestimmung innerhalb eines gewissen Zeitintervalls erfolgt. Eine Zuordnung eines Lastwerts zu einer angehobenen Last kann durch die Ausführung der Funktion bei dem Annähern und/oder dem Durchtreten erfolgen.
- Durch die Ausführung einer Funktion in Form einer Bestimmung zumindest eines Lastwertes einer von der hydraulischen Hebevorrichtung angehobenen Last in Abhängigkeit eines Annäherns und/oder dem Durchtretens können mit einer Auslösergrenzfläche vorteilhafte Zustände einer Stellung und/oder einer Bewegung der Hebevorrichtung für die Bestimmung zumindest eines Lastwerts geschaffen werden. Durch die Ausführung der Funktion bei dem Annähern und/oder dem Durchtreten eines vorgegebenen oder vorgebbaren Punktes eines Armsystems der Hebevorrichtung an die und/oder durch die zumindest eine Auslösergrenzfläche kann eine zumindest teilweise innerhalb eines vorgebbaren oder vorgegebenen Bereichs liegende Stellung eines Armsystems der Hebevorrichtung und/oder Bewegung der Hebevorrichtung angefahren und/oder durchlaufen werden.
- Ein Benutzer der Hebevorrichtung muss dabei zur Bestimmung eines Lastwerts einer Last keine vorgegebene Stellung eines Armsystems anfahren oder die Bewegung und damit die Arbeit mit der Hebevorrichtung unterbrechen, sondern lediglich einen vorgegebenen oder vorgebbaren Punktes eines Armsystems der Hebevorrichtung an die zumindest eine Auslösergrenzfläche annähern und/oder mit einem vorgegebenen oder vorgebbaren Punktes eines Armsystems der Hebevorrichtung durch die zumindest eine Auslösergrenzfläche durchtreten.
- Bei einer wiederholten Bestimmung zumindest eines Lastwertes, beispielsweise beim wiederholten Verladen von Lasten, etwa auf einen oder von einem Laderaum, kann ein wiederholtes Annähern und/oder Durchtreten eines vorgegebenen oder vorgebbaren Punktes eines Armsystems der Hebevorrichtung an die und/oder durch die zumindest eine Auslösergrenzfläche erfolgen. Dabei kann bei jeder Wiederholung eine zumindest teilweise innerhalb eines Bereichs identische oder angenäherte Stellung eines Armsystems der Hebevorrichtung und/oder Bewegung der Hebevorrichtung angefahren und/oder durchlaufen werden. Der bei jeder Wiederholung bestimmte zumindest eine Lastwert kann so für zumindest teilweise innerhalb eines Bereichs identischen oder angenäherten Stellungen eines Armsystems der Hebevorrichtung und/oder Bewegungen eines Armsystems der Hebevorrichtung ermittelt werden.
- Es kann während des Annäherns und/oder des Durchtretens eine Bewegung eines Armsystems der hydraulischen Hebevorrichtung entlang zumindest eines Freiheitsgrades der Bewegung des Armsystems mit einer angehobenen Last erfolgen.
- Bei einer Bewegung des Armsystems kann eine im Wesentlichen frei wählbare Bewegung entlang zumindest eines Freiheitsgrades der Bewegung des Armsystems erfolgen.
- Während der Bewegung des Armsystems kann zumindest eine Bestimmung der während der Bewegung vorherrschenden dynamischen Belastungsmomente der Arme des Armsystems erfolgen, wobei unter Einbeziehung der dynamischen Belastungsmomente zumindest ein Lastwert für die angehobene Last bestimmt werden kann.
- Dynamische Belastungsmomente können durch während einer Bewegung eines Armsystem auftretende Belastungen der Arme des Armsystems durch deren Eingenmassen und deren Auslagerung, sowie durch die Masse oder Massen einer angehobenen Last und deren Auslagerung gegeben sein.
- Auch können während einer Bewegung auftretende Beschleunigungskräfte einen Beitrag zu den dynamische Belastungsmomenten leisten. Bei einer im Wesentlichen gleichförmig verlaufenden Bewegung können die auftretende Beschleunigungskräfte sehr viel kleiner sein als die durch die Eigenmassen der Arme oder durch Lastmassen gegebenen Gewichtskräfte.
- Eine Auslagerung kann beispielsweise durch einen horizontalen oder radialen Abstand von einer vertikalen Achse eines Armsystems, vorzugsweise einer vertikalen Schwenkachse einer Lagerung eines Armsystems, gegeben sein.
- Durch eine während einer Bewegung erfolgende Bestimmung können beispielsweise Lagerreibungen von Lagerstellen von Armen eines Armsystems einen geringeren Einfluss auf eine Bestimmung von dynamischen Belastungsmomenten haben als bei einer statischen Messung im Stillstand.
- Es soll nicht ausgeschlossen sein, dass während einer Bewegung des Armsystems ohne eine angehobene Last zumindest eine Bestimmung der während der Bewegung vorherrschenden dynamischen Belastungsmomente durch die Eigenmassen der Arme des Armsystems erfolgt, wobei unter Einbeziehung der dynamischen Belastungsmomente zumindest ein Lastwert bestimmt werden kann. Ein solcher Lastwert kann als eine Referenzgröße für eine unbeladene Hebevorrichtung bestimmt werden.
- Bei einer Bestimmung zumindest eines Lastwertes einer von der hydraulischen Hebevorrichtung angehobenen Last kann eine Aufzeichnung des zumindest einen Lastwerts in einer Lastwertfolge erfolgen. Dabei kann eine wiederholte Bestimmung zumindest eines Lastwertes einer von der hydraulischen Hebevorrichtung angehobenen Last erfolgen, wobei der wiederholt bestimmte Lastwert in einer Lastwertfolge aufgezeichnet werden kann. Die Lastwertfolge kann einer zeitlich geordneten Menge von aufgezeichneten Lastwerten entsprechen.
- Eine Aufzeichnung des zumindest einen Lastwerts in einer Lastwertfolge kann fortlaufend erfolgen, beispielsweise mit einer gewissen Taktfrequenz. Eine Taktfrequenz kann angeben, wie oft eine Aufzeichnung innerhalb eines gewissen Zeitintervalls erfolgt.
- Eine Aufzeichnung des zumindest einen Lastwerts in einer Lastwertfolge kann während einer Bewegung der Hebevorrichtung mit einer angehobenen Last erfolgen. Analog kann eine Aufzeichnung zumindest eines Lastwerts in einer Lastwertfolge während einer Bewegung der Hebevorrichtung mit unbelasteter Hebevorrichtung erfolgen.
- Eine Bestimmung des zumindest einen Lastwerts und eine Aufzeichnung des zumindest einen Lastwerts in einer Lastwertfolge kann grundsätzlich während des gesamten Betriebs einer Hebevorrichtung erfolgen.
- Beispielsweise kann eine Bestimmung des zumindest einen Lastwerts und eine Aufzeichnung des zumindest einen Lastwerts in einer Lastwertfolge fortlaufend während der im Wesentlichen gesamten Zeitdauer einer Bewegung eines Armsystems erfolgen.
- In Abhängigkeit der Annäherung und/oder des Durchtretens eines vorgegebenen oder vorgebbaren Punktes eines Armsystems der Hebevorrichtung an die und/oder durch die zumindest eine Auslösergrenzfläche kann eine Auswahl zumindest eines aufgezeichneten Lastwerts aus der Lastwertfolge erfolgen. Dabei kann aus der Lastwertfolge zumindest ein Lastwert ausgewählt werden, der bei der Annäherung und/oder dem Durchtreten bestimmt wurde.
- Es kann eine Auswahl zumindest eines aufgezeichneten Lastwerts aus der Lastwertfolge erfolgen, der innerhalb eines Zeitintervalls vor dem, nach dem oder um das Annähern und/oder das Durchtreten bestimmt wurde.
- Der Lastwert, der einer von der hydraulischen Hebevorrichtung angehobenen Last zuordenbar ist, kann aus dem zumindest einen ausgewählten Lastwert bestimmt werden.
- Durch eine Bestimmung des Lastwerts aus ausgewählten Lastwerten können beispielsweise Lastwerte in die Bestimmung einbezogen werden, die für zumindest teilweise innerhalb eines Bereichs identische oder angenäherten Stellungen eines Armsystems der Hebevorrichtung und/oder Bewegungen eines Armsystems der Hebevorrichtung bestimmt wurden.
- Bei einer fortlaufend während einer im Wesentlichen gesamten Zeitdauer einer Bewegung eines Armsystems erfolgenden Bestimmung und Aufzeichnung zumindest eines Lastwerts können beispielsweise Lastwerte ausgewählt werden, der bei der Annäherung und/oder dem Durchtreten bestimmt wurden.
- Der Lastwert kann aus einem arithmetischen Mittel aus dem zumindest einen ausgewählten Lastwert bestimmt werden. Vorzugsweise kann der Lastwert aus einem gewichteten arithmetischen Mittel bestimmt werden, wobei eine Gewichtung nach zumindest einem bestimmten Auswahlkriterium erfolgen kann.
- Während des Annäherns und/oder des Durchtretens kann eine Bewegung eines Armsystems der hydraulischen Hebevorrichtung entlang zumindest eines Freiheitsgrades der Bewegung des Armsystems erfolgen, wobei in zumindest einem Zeitintervall während der Bewegung des Armsystems zumindest eine Erfassung der in dem zumindest einen Zeitintervall vorherrschenden Werte zumindest eines der Freiheitsgrade der Bewegung des Armsystems und zumindest eine Erfassung zumindest einer in dem zumindest einen Zeitintervall auf das Armsystem wirkenden Kraft erfolgen kann.
- Für die Erfassung zumindest einer Kraft können geeignete Sensoren vorgesehen sein.
- Eine Erfassung von vorherrschenden Werte zumindest eines der Freiheitsgrade der Bewegung des Armsystems und eine Erfassung zumindest einer auf das Armsystem wirkenden Kraft kann für eine Bestimmung der während der Bewegung vorherrschenden dynamischen Belastungsmomente der Arme des Armsystems erfolgen.
- Ein Zeitintervall, in welchem eine Erfassung von vorherrschenden Werte zumindest eines der Freiheitsgrade der Bewegung des Armsystems und eine Erfassung zumindest einer auf das Armsystem wirkenden Kraft erfolgt, kann sich zumindest
- vor das Annähern und/oder das Durchtreten,
- nach das Annähern und/oder das Durchtreten, oder
- um das Annähern und/oder das Durchtreten
- Eine Auswahl zumindest eines aufgezeichneten Lastwerts aus der Lastwertfolge und/oder eine Gewichtung kann zumindest eines der folgenden Auswahlkriterien umfassen:
Eine Auswahl kann abhängig von einer Mindestdauer und/oder einer Maximaldauer für das zumindest eine Zeitintervall erfolgen. - Eine Auswahl kann abhängig von einer Vorgabe eines Zeitintervalls durch eine Interaktion durch einen Benutzer, beispielweise über zumindest eine Benutzerschnittstelle einer Steuerung der Hebevorrichtung, erfolgen.
- Eine Auswahl kann abhängig von einem Minimalwert und/oder einem Maximalwert und/oder einem Intervall für die erfassten Werte des zumindest einen der Freiheitsgrade der Bewegung des Armsystems erfolgen. Dadurch können Lastwerte ausgewählt werden, die für zumindest teilweise innerhalb eines Bereichs identische oder angenäherten Stellungen eines Armsystems der Hebevorrichtung und/oder Bewegungen eines Armsystems der Hebevorrichtung bestimmt wurden.
- Eine Auswahl kann abhängig von einem Minimalwert und/oder einem Maximalwert und/oder einem Intervall für die zumindest eine erfasste Kraft erfolgen. Dadurch können Lastwerte ausgewählt werden, die in einem beladenen Zustand der Hebevorrichtung bestimmt wurden. Auch können dadurch Lastwerte ausgewählt werden, die innerhalb von technisch plausiblen Grenzen liegen, um beispielsweise Fehlsignale von Sensoren auszuschließen.
- Eine Auswahl kann abhängig von einem Minimalwert und/oder einem Maximalwert und/oder einem Intervall für eine Änderungsrate der erfassten Werte des zumindest einen der Freiheitsgrade der Bewegung des Armsystems erfolgen. Dadurch können Lastwerte ausgewählt werden, die während einer zumindest abschnittsweise im Wesentlichen gleichförmigen Bewegung entlang zumindest eines Freiheitsgrades des Armsystems bestimmt wurden.
- Eine Auswahl kann abhängig von einem Minimalwert und/oder einem Maximalwert und/oder einem Intervall für eine Änderungsrate der zumindest einen erfassten Kraft erfolgen. Dadurch können Lastwerte ausgewählt werden, die während einer zumindest abschnittsweise im Wesentlichen gleichförmigen Bewegung entlang zumindest eines Freiheitsgrades des Armsystems bestimmt wurden.
- Eine Vorgabe des zumindest einen Parameters kann über zumindest eine Benutzerschnittstelle der Steuerung der Hebevorrichtung durch eine Abgabe von Bedienbefehlen für eine Bewegung eines mehrere Freiheitsgrade der Bewegung aufweisenden Armsystem mit mehreren Armen entlang zumindest eines der Freiheitsgrade erfolgen. Dabei kann beispielsweise zumindest ein Punkt der zumindest einen Auslösergrenzfläche durch Positionieren eines vorgegebenen oder vorgebbaren Punktes des Armsystems der Hebevorrichtung durch eine Abgabe von Bedienbefehlen für eine Bewegung des Armsystems durch einen Benutzer vorgegeben werden. Dadurch kann beispielsweise zumindest eine Höhe, eine Längserstreckung, eine Neigung, ein Mittelpunkt oder eine Raumkoordinate eines Punktes der zumindest einen Auslösergrenzfläche vorgebbar sein. Es können mehrere Parameter der zumindest einen Auslösergrenzfläche vorgebbar sein.
- Alternativ oder in Kombination kann eine Vorgabe des zumindest einen Parameters über zumindest eine Benutzerschnittstelle der Steuerung der Hebevorrichtung durch eine Eingabe zumindest eines Abstandswertes und/oder eines Winkelwertes für eine Relativposition der zumindest einen Auslösergrenzfläche relativ zu der Hebevorrichtung durch einen Benutzer erfolgen. Auch können zumindest eine Höhe, eine Längserstreckung, eine Neigung, ein Mittelpunkt oder eine Raumkoordinate eines Punktes der zumindest einen Auslösergrenzfläche vorgebbar sein. Es können mehrere Parameter der zumindest einen Auslösergrenzfläche vorgebbar sein.
- Erfolgt die Vorgabe des zumindest einen Parameters durch eine Abgabe von Bedienbefehlen, kann eine Bestimmung zumindest eines durch die Steuerung verarbeitbaren Wertes des zumindest einen Parameters durch die Steuerung und zumindest ein von einer Steuerung der Hebevorrichtung erfassbares Sensorsignal zumindest eines an der Hebevorrichtung angeordneten oder anordenbaren Sensors erfolgen.
- An der Hebevorrichtung angeordneten oder anordenbaren Sensoren können allgemein Winkelsensoren, Längensensoren, Positionssensoren, und/oder optische Sensoren wie Infrarotsensoren, Ultraschallsensoren, und/oder eine Kamera umfassen.
- Ein Ausführen der zumindest einen vorbestimmten oder vorbestimmbaren Funktion der Hebevorrichtung bei einer Annäherung an die zumindest eine Auslösergrenzfläche kann innerhalb eines vorgegebenen oder vorgebbaren Abstands eines vorgegebenen oder vorgebbaren Punktes des Armsystems der Hebevorrichtung erfolgen. Eine Vorgabe kann über zumindest eine Benutzerschnittstelle der Steuerung der Hebevorrichtung, beispielsweise durch eine Eingabe zumindest eines Abstandswertes, erfolgen.
- Schutz wird auch begehrt für eine Steuerung für eine Hebevorrichtung, die Mittel zur Ausführung des zuvor beschriebenen Verfahrens umfasst.
- Die Steuerung kann zur Vorgabe zumindest eines Parameters für eine Relativposition der zumindest einen Auslösergrenzfläche relativ zu der Hebevorrichtung durch zumindest ein Sensorsignal eines mit einer Steuerung der Hebevorrichtung in Datenkommunikation stehenden Sensors der Hebevorrichtung erfolgt und/oder über zumindest eine Benutzerschnittstelle einer Steuerung der Hebevorrichtung durch einen Benutzer konfiguriert sein.
- Die Steuerung kann zum Erstellen der zumindest einen Auslösergrenzfläche in Abhängigkeit des zumindest einen Parameters konfiguriert sein.
- Die Steuerung kann zum Ausführen zumindest einer vorbestimmten oder vorbestimmbaren Funktion der Hebevorrichtung bei einer Annäherung eines vorgegebenen oder vorgebbaren Punktes eines Armsystems der Hebevorrichtung an die zumindest eine Auslösergrenzfläche und/oder bei einem Durchtreten eines vorgegebenen oder vorgebbaren Punktes eines Armsystems der Hebevorrichtung durch die zumindest eine Auslösergrenzfläche konfiguriert sein.
- Ein Computerprogrammprodukt kann Befehle umfassen, die bewirken, dass die zuvor beschriebene, zur Durchführung des Verfahrens konfigurierte Steuerung, gegebenenfalls in einer Anordnung mit einer vorzugsweise mit entsprechenden Sensoren ausgestatteten Hebevorrichtung, ein wie zuvor beschriebenes Verfahren ausführt.
- Befehle eines Computerprogrammprodukts können beispielsweise in wenigstens einer Speichereinheit der Steuerung hinterlegt sein und durch wenigstens eine Recheneinheit der Steuerung ausgeführt werden.
- Schutz wird auch begehrt für eine Hebevorrichtung mit einer wie zuvor beschriebenen Steuerung. Die Hebevorrichtung kann als Ladekran oder als Holzkran ausgebildet sein. Vorzugsweise kann die Hebevorrichtung als ein hydraulischer Kran ausgebildet sein.
- Die Hebevorrichtung kann zur Ausbildung eines Fahrzeugs mit einer Hebevorrichtung auf einem Trägerfahrzeug anordenbar sein. Das Trägerfahrzeug kann einen Ladebereich für Ladegut aufweisen. Das Trägerfahrzeug kann mit zumindest einem einen Ladebereich aufweisenden Anhänger, der relativ zur Hebevorrichtung positionierbar sein kann, angeordnet werden.
- Weitere Einzelheiten und Vorteile der vorliegenden Erfindung werden anhand der Figurenbeschreibung unter Bezugnahme auf die in den Zeichnungen dargestellten Ausführungsbeispiele im Folgenden näher erläutert. Darin zeigt:
- Figuren 1 bis 3
- schematische Abläufe von Ausführungen eines Verfahrens
- Figur 4
- eine Ausführung einer Hebevorrichtung mit einer Steuerung und einer Auslösergrenzfläche
- Figur 5
- eine schematische Darstellung einer Hebevorrichtung
- Figuren 6a bis 6c
- eine schematische Darstellung einer Bewegung einer Hebevorrichtung
- Figur 7
- eine Ausführung eines Fahrzeugs mit einer Hebevorrichtung
- Figuren 8a und 8b
- schematische Ansichten unterschiedlicher Anordnungen eines Fahrzeugs mit einer Hebevorrichtung und einem Anhänger
- Figuren 9a und 9b
- schematische Ansichten unterschiedlicher Anordnungen eines Fahrzeugs mit einer Hebevorrichtung und einem Anhänger
- Figuren 10a bis 10c
- schematische Ansichten zu Auswahlmöglichkeiten einer Benutzerschnittstelle
- Die
Figuren 1 bis 3 zeigen schematisch Ausführungen eines Ablauf zum Ausführen einer vorbestimmten oder vorbestimmbaren Funktion.Figur 4 zeigt eine Ausführung einer Hebevorrichtung 1 mit einer eine Benutzerschnittstelle 21 aufweisenden Steuerung 11 und einer angehobenen Last 3, wobei die Freiheitsgrade w, k1, k2, s1, s2, a der Bewegung des mehrere Arme 4, 5, 6, 7, 8, 9 aufweisenden Armsystems 2 und eine relativ zur Hebevorrichtung positionierte Auslösergrenzfläche 20 illustriert sind.Figur 5 zeigt eine weitere schematische Darstellung einer Hebevorrichtung 1. DieFiguren 6a bis 6c zeigen eine schematische Darstellung einer Bewegung einer Hebevorrichtung 1.Figur 7 zeigt eine Ausführung eines Fahrzeugs 17 mit einer heckseitig angeordneten Hebevorrichtung 1 mit einem Ladebereich 19. DieFiguren 8a und 8b zeigen schematische Ansichten unterschiedlicher Anordnungen eines Fahrzeugs 17 mit einer Hebevorrichtung 1 und einem Anhänger 23 bei einer Vorgabe zumindest eines Parameters für eine Auslösergrenzfläche 20. DieFiguren 9a und 9b zeigen schematische Ansichten unterschiedlicher Anordnungen eines Fahrzeugs 17 mit einer Hebevorrichtung 1 und einem Anhänger 23 bei einer Vorgabe zumindest eines Parameters für eine Auslösergrenzfläche 20. DieFiguren 10a bis 10c schematische Ansichten zu Auswahlmöglichkeiten einer Benutzerschnittstelle 21. -
Figur 1 zeigt schematisch einen Ablauf einer Ausführung eines Verfahrens zum Ausführen einer vorbestimmten oder vorbestimmbaren Funktion eine Hebevorrichtung 1 in Abhängigkeiten zumindest einer Auslösergrenzfläche 20. - Dabei kann eine Vorgabe i zumindest eines Parameters für eine Relativposition der zumindest einen Auslösergrenzfläche 20 relativ zu der Hebevorrichtung 1 durch zumindest ein Sensorsignal eines mit einer Steuerung 11 der Hebevorrichtung 1 in Datenkommunikation stehenden Sensors der Hebevorrichtung 1 und/oder eine Vorgabe über zumindest eine Benutzerschnittstelle 21 einer Steuerung 11 der Hebevorrichtung 1 durch einen Benutzer erfolgen.
- In Abhängigkeit des zumindest einen Parameters kann ein Erstellen ii der zumindest einen Auslösergrenzfläche 20 erfolgen. Die Vorgabe i zumindest eines Parameters und entsprechendes Erstellen ii zumindest einer, gegebenenfalls zusätzlichen, Auslösergrenzfläche 20 kann wiederholt erfolgen. Auch können mehrere Auslösergrenzflächen 20 durch Parameter erstellt werden.
- Bei einer Annäherung eines vorgegebenen oder vorgebbaren Punktes P eines Armsystems 2 der Hebevorrichtung 1 an die zumindest eine Auslösergrenzfläche 20 und/oder bei einem Durchtreten eines vorgegebenen oder vorgebbaren Punktes P eines Armsystems 2 der Hebevorrichtung 1 durch die zumindest eine Auslösergrenzfläche 20 kann ein Ausführen iii zumindest einer vorbestimmten oder vorbestimmbaren Funktion der Hebevorrichtung 1 erfolgen. Es ist möglich, dass nach einem Ausführen iii zumindest einer vorbestimmten oder vorbestimmbaren Funktion der Hebevorrichtung 1 die Vorgabe i zumindest eines Parameters und entsprechendes Erstellen ii zumindest einer Auslösergrenzfläche 20 wiederholt wird.
- In
Figur 2 ist eine Ausführung des Verfahrens gezeigt, bei welchem bei dem Annähern und/oder dem Durchtreten eine Funktion zur Bestimmung zumindest eines Lastwertes m1, m2, m3 einer von der hydraulischen Hebevorrichtung 1 angehobenen Last 3 ausgeführt wird. - Während des Annäherns und/oder des Durchtretens kann eine Bewegung eines Armsystems 2 der hydraulischen Hebevorrichtung 1 entlang zumindest eines Freiheitsgrades w, k1, k2, s1, s2, a der Bewegung des Armsystems 2 mit einer angehobenen Last e erfolgen, wobei während der Bewegung des Armsystems 2 zumindest eine Bestimmung der während der Bewegung vorherrschenden dynamischen Belastungsmomente der Arme 4, 5, 6, 7, 8, 9 des Armsystems 2 erfolgt, wobei unter Einbeziehung der dynamischen Belastungsmomente zumindest ein Lastwert m1, m2, m3 für die angehobene Last 3 bestimmt werden kann.
- Dabei kann während der Bewegung des Armsystems 2 fortlaufend zumindest ein Lastwert m1, m2, m3 für die angehobene Last 3 bestimmt werden. Bei dem Annähern und/oder dem Durchtreten kann durch ein Ausführen iii der Funktion eine Zuordnung eines Lastwerts m1, m2, m3 zu einer angehobenen Last 3 erfolgen.
- Dabei kann wie in
Figur 3 schematisch dargestellt eine Aufzeichnung iv des zumindest einen Lastwerts m1, m2, m3 in einer Lastwertfolge (m1, m2, m3) erfolgen. In Abhängigkeit der Annäherung und/oder des Durchtretens kann eine Auswahl v zumindest eines aufgezeichneten Lastwerts m1, m2, m3 aus der Lastwertfolge (m2, m3) erfolgen und ein bereinigter Lastwert m aus dem zumindest einen ausgewählten Lastwert m1, m2, m3 bestimmt vi werden. - In
Figur 4 eine Ausführung einer Hebevorrichtung 1 mit einer Steuerung 11 und am Armsystem 2 der Hebevorrichtung 1 angeordneter Sensorik gezeigt. - Das Armsystem 2 der Hebevorrichtung 1 weist in der beispielhaften Ausführung eine schwenkbar in einer Basis 4 gelagerte Kransäule 5, einen schwenkbar an dieser gelagerten Hubarm 6 und einen schwenkbar an diesem gelagerten Knickarm 7 auf. In der gezeigten Stellung des Armsystems2 ist der Hubarm 6 unter einem ersten Knickwinkel k1 an der Kransäule 5 angeordnet und der Knickarm 7 unter einem zweiten Knickwinkel k2 am Hubarm 6 angeordnet. Zum Verschwenken des Hubarms 6 und des Knickarms 7 sind Aktuatoren 14, 15 vorgesehen. Der Knickarm 7 weist in der gezeigten Ausführung 2 zwei Schubarme 8,9 auf, mittels welcher sich die Länge des Knickarms 7 verändern lässt. An der Kranspitze, welche in der gezeigten Ausführung vom freien Ende des Knickarms 7 ausgebildet wird, ist ein frei hängendes Arbeitsgerät 10 in Form eines Greifers angeordnet.
- Als ein auf das Annähern und/oder des Durchtreten an und/oder durch die Auslösergrenzfläche 20 bezogener Punkt P des Armsystems 2 ist in dieser Ausführung die Spitze 18 des Knickarms 7 vorgegeben. Ein Punkt des Arbeitsgeräts 10 oder ein Punkt entlang des Armsystem 2 ist ebenso vorgebbar.
- Die Sensorik der Hebevorrichtung 1 umfasst einen Sensor d4 zur Erfassung einer Schwenkstellung w der Kransäule 5 zur Basis 4, einen Sensor d1 zur Erfassung des ersten Knickwinkels k1, einen Sensor d2 zur Erfassung des zweiten Knickwinkels k2, einen Schubstellungssensor 11 zur Erfassung der Schubstellung s1 des ersten Schubarms 8 und einen zweiten Schubstellungssensor 12 zur Erfassung der Schubstellung s2 des zweiten Schubarms 9 auf.
- Das an der Hebevorrichtung 1 angeordnete und als Greifer ausgebildete Arbeitsgerät 3 weist einen Sensor d3 zur Erfassung des Öffnungswinkels a auf.
- Zur Erfassung zumindest eines Betriebsparameters der Aktuatoren 14, 15, mit denen sich auf die Aktuatoren wirkende Kräfte erfassbar sind, können geeignete Sensoren p1, p2, wie beispielsweise Drucksensoren oder Leistungssensoren, vorgesehen sein.
- Durch die an der Hebevorrichtung 1 verbauten Sensoren kann sich die Geometrie des Armsystem 2 erfassen lassen.
- In der gezeigten Ausführung kann die Steuerung 11 Signaleingänge zur Zuführung von Sensorsignalen über Signalleitungen der Sensoren und Signalausgänge zur Ausgabe von Steuerbefehlen zumindest an die Aktuatoren 14, 15 aufweisen. Die Steuerung 11 weist eine Recheneinheit 11 und eine Speichereinheit 13 auf.
- Die Steuerung weist eine Benutzerschnittstelle 21 auf, die zumindest zur Vorgabe i zumindest eines Parameters für eine Relativposition der zumindest einen Auslösergrenzfläche 20 relativ zu der Hebevorrichtung 1 geeignet ist. Die Benutzerschnittstelle 21 kann mit der Steuerung 11 und/oder einer Fernsteuerung 22 der Steuerung 11 in Datenverbindung stehen und kann menügeführt und/oder mit einer Eingabemaske in Form einer Benutzerführung mit grafischer, zeichenorientierter oder sprachorientierter Benutzeroberfläche ausgeführt sein. Eine Vorgabe zumindest eines Parameters für eine Relativposition der zumindest einen Auslösergrenzfläche 20 relativ zu der Hebevorrichtung 1 kann über die Benutzerschnittstelle 21, insbesondere Eingabemittel, erfolgen.
- Eine Vorgabe i zumindest eines Parameters über zumindest eine Benutzerschnittstelle 21 der Steuerung 11 der Hebevorrichtung 1 kann in dieser Ausführung durch eine Eingabe zumindest eines Abstandswertes D und/oder eines Winkelwertes N für eine Relativposition der zumindest einen Auslösergrenzfläche 20 relativ zu der Hebevorrichtung 1 erfolgen. Eine Vorgabe i zumindest eines Parameters der zumindest einen Auslösergrenzfläche 20 kann auch wie in den
Figuren 8a, 8b ,9a, 9b dargestellt erfolgen. - Ein Ausführen iii der zumindest einen vorbestimmten oder vorbestimmbaren Funktion der Hebevorrichtung 1 bei einer Annäherung an die zumindest eine Auslösergrenzfläche 20 kann innerhalb eines vorgegebenen oder vorgebbaren Abstands x eines vorgegebenen oder vorgebbaren Punktes P des Armsystems 2 der Hebevorrichtung 1 erfolgen. Ein solcher vorgegebener oder vorgebbarer Abstand x ist beispielhaft in den
Figuren 4 ,6c ,9a und 9b dargestellt. - In
Figur 5 ist eine weitere schematische Darstellung einer Hebevorrichtung 1 gezeigt. Die Ausführung entspricht im Wesentlichen jener derFigur 4 , wobei der Knickarm 7 zur vereinfachten Darstellung aus zwei Schubarmen 7, 8 gebildet ist. - Auf das Armsystem 2 wirkende Belastungsmomente können durch Belastungen der Arme 4, 5, 6, 7, 8, 9 des Armsystems 2 durch deren Eingenmassen und deren Auslagerung, sowie durch die Masse oder Massen einer angehobenen Last 3 und deren Auslagerung gegeben sein.
- Zu den Belastungen können Eingenmassen und Auslagerung der Arme 4, 5, 6, 7, 8, 9 des Armsystems 2 können durch die Massen der Schwerpunkte SP6, SP8, SP9 der Arme 4, 5, 6, 7, 8, 9 6, 8, 9 und deren Auslagerungen r6, r8, r9 beitragen. Zur Belastung können die Eigenmassen der Schwerpunkte SP15, SP10 eines Aktuators 15 und eines Arbeitsgeräts 10 und deren Auslagerungen r15, r10 hinzu kommen. Letztlich kann die Masse des Schwerpunkts SP3 der Last 3 und deren Auslagerung r3 zur Belastung beitragen.
- Eine Auslagerung r3, r6, r8, r9, r10, r15 kann wie dargestellt durch einen horizontalen oder radialen Abstand von einer vertikalen Schwenkachse einer Lagerung eines Armsystems 2 gegeben sein und dich beispielsweise trigonometrisch aus bekannten Abmessungen von Armen 4, 5, 6, 7, 8, 9 des Armsystems 2 und an der Hebevorrichtung 2 verbauter Sensoren ermitteln lassen. Die Schwenkachse einer Lagerung kann durch die Kransäule 5 verlaufen.
- Im Ablauf der
Figuren 6a, 6b, 6c ist eine schematische Darstellung einer Hubbewegung einer Hebevorrichtung 1 mit einer daran an einem Lastseil 16 angeschlagenen Last 3 gezeigt. Die Ausführung der Hebevorrichtung 1 kann im Wesentlichen jenen derFiguren 4 oder5 entsprechen. - In der Darstellung der
Figuren 6a, 6b, 6c erfolgt ein beispielhaftes Bewegen i des Armsystems 2 entlang eines Freiheitsgrades w, k1, k2, s1, s2, a des Knickwinkels k2. - Für die Bestimmung von dynamischen Belastungsmomenten kann in zumindest einem Zeitintervall während der Bewegung des Armsystems 2 zumindest eine Erfassung der in dem zumindest einen Zeitintervall vorherrschenden Werte zumindest eines der Freiheitsgrade w, k1, k2, s1, s2, a k2 der Bewegung des Armsystems 2 und zumindest eine Erfassung zumindest einer in dem zumindest einen Zeitintervall gemeinsam mit der Last 3 auf das Armsystem 2 wirkenden Kraft erfolgen. Damit kann eine Bestimmung der während der Bewegung vorherrschenden dynamischen Belastungsmomente der Arme 4, 5, 6, 7, 8, 9 des Armsystems 2 erfolgen und unter Einbeziehung der dynamischen Belastungsmomente eine Bestimmung zumindest eines Lastwerts m1, m2, m3 für die angehobene Last 3 erfolgen.
- Bei dem Annähern und/oder dem Durchtreten des Punktes P des Armsystems 2 kann eine Funktion zur Bestimmung zumindest eines Lastwertes m1, m2, m3 einer von der hydraulischen Hebevorrichtung 1 angehobenen Last 3 ausgeführt werden. Während der Bewegung des Armsystems 2 kann fortlaufend zumindest ein Lastwert m1, m2, m3 für die angehobene Last 3 bestimmt werden und bei dem Annähern und/oder dem Durchtreten kann durch ein Ausführen der Funktion eine Zuordnung eines Lastwerts m1, m2, m3 zu einer angehobenen Last 3 erfolgen.
- Es kann eine Aufzeichnung iv der erfassten Lastwerte m1, m2, m3 in einer Lastwertfolge erfolgen und daraus in Abhängigkeit zumindest eines vorgegebenen oder vorgebbaren Auswahlkriteriums eine Auswahl v zumindest eines aufgezeichneten Lastwerts m2, m3 aus der Lastwertfolge erfolgen.
- In Abhängigkeit der Annäherung und/oder des Durchtretens kann in
Figur 6c eine Auswahl v zumindest eines aufgezeichneten Lastwerts m3 aus der Lastwertfolge erfolgen. Zusätzlich kann als Auswahlkriterium beispielsweise inFigur 6a eine mittels dem Sensor p1 erfasste Kraft unterhalb eines Minimalwerts liegen. Daraus kann beispielsweise erkannt werden, dass die Last 3 noch nicht angehoben wurde und der fürFigur 6a bestimmte Lastwert m1 nicht repräsentativ für die Lastmasse ist. - Ein bereinigter Lastwert m kann in weiterer Folge aus den ausgewählten Lastwerten m2, m3 bestimmt vi werden. Insbesondere kann die die Bestimmung vi des bereinigten Lastwerts m aus einem gewichteten arithmetischen Mittel erfolgen, bei dem der in Abhängigkeit der Annäherung und/oder des Durchtretens ausgewählte Lastwert m3 stärker gewichtet wird.
- Weitere Auswahlkriterien wie etwa für Werte und Änderungsraten von Freiheitsgraden, Dauern von Zeitintervallen und Werte und Änderungsraten von Kräften können ebenso zur Auswahl zumindest eines der bestimmten Lastwerte m1, m2, m3 herangezogen werden.
- Analog zur Bestimmung von dynamischen Belastungsmomenten können
- dynamische Eigenmomente ohne eine angehobene Last, und/oder
- statische Eigenmomente ohne eine angehobene Last, und/oder
- statische Belastungsmomente mit einer angehobenen Last 3 in Form einer Referenzlast mit bekannter Lastmasse, und/oder
- dynamische Belastungsmomente mit einer angehobenen Last 3 in Form einer Referenzlast mit bekannter Lastmasse
- In
Figur 7 ist ein Ausführung eines Fahrzeugs 17 mit einer entlang einer Längsachse des Fahrzeugs 17 heckseitig angeordneten Hebevorrichtung 1 mit einem Armsystem 2 gezeigt. Das Fahrzeug 17 - und damit die Hebevorrichtung 1 - kann einen Ladebereich 19 für eine Last 3 aufweisen. - Das Fahrzeug 17 mit der Hebevorrichtung 1 kann wie schematisch in den
Figuren 8a und 8b dargestellt mit zumindest einem einen Ladebereich 19 aufweisenden Anhänger 23 angeordnet werden, wobei der Anhänger 23 wie gezeigt relativ zur Hebevorrichtung 1 positionierbar sein kann. Zur Erfassung einer Winkelstellung eines Anhängers 23 relativ zum Fahrzeug 17 kann die Hebevorrichtung 1 einen Sensor d5 aufweisen. - In einer Ausführung kann bei dem Erstellen ii einer Auslösergrenzfläche 20 eine Grenzfläche zwischen zumindest einem Teil eines Innenbereichs eines Ladebereichs 19 der Hebevorrichtung 1 und zumindest eines Teils eines Außenbereichs des Ladebereichs 19 der Hebevorrichtung 1 erstellt werden. Dabei kann zumindest ein Parameter für eine Relativposition der zumindest einen Auslösergrenzfläche 20 relativ zu der Hebevorrichtung 1 in Abhängigkeit einer Position eines Ladebereichs 19 der Hebevorrichtung 1 vorgebbar sein.
- Eine Vorgabe i zumindest eines Parameters für eine Relativposition der zumindest einen Auslösergrenzfläche 20 relativ zu der Hebevorrichtung 1 kann im Beispiel der
Figur 8a durch einen Sensor d5 zur Erfassung einer Winkelstellung eines Anhängers 23 relativ zum Fahrzeug 17 erfolgen. Im Beispiel derFigur 8b kann dies durch eine Bewegung des Armsystems 2 erfolgen. InFigur 8b kann Auslösergrenzfläche 20 für einen Ladebereich 19 der Hebevorrichtung 1 und eine Auslösergrenzfläche 20 für einen Ladebereich 19 eines Anhängers 23 durch eine Bewegung des Armsystems 2 vorgegeben werden, wobei die dafür verwendeten Stellungen des Armsystems 2 überlagert dargestellt sind. - Alternativ oder in Kombination kann wie in den
Figuren 9a und 9b illustriert eine Vorgabe i eines Parameters in Abhängigkeit der Position eines Ladebereichs 19 über zumindest eine Benutzerschnittstelle einer Steuerung11 der Hebevorrichtung 1 durch einen Benutzer erfolgen. - Dies kann durch eine Abgabe von Bedienbefehlen für eine Bewegung des Armsystems 2 erfolgen. Dadurch kann allgemein im Wesentlichen zumindest ein Punkt der Auslösergrenzfläche 20 vorgegeben werden. Im Beispiel der
Figur 9a kann ein Mittepunkt M und ein Radius R einer kreisförmigen, insbesondere Kreiszylinder-förmigen, Auslösergrenzfläche 20 für einen Ladebereich 19 eines Anhängers 23 durch eine Bewegung des Armsystems 2 vorgegeben werden, wobei die dafür verwendeten Stellungen des Armsystems 2 überlagert dargestellt sind. Im Beispiel derFigur 9b kann eine durch eine Bewegung des Armsystems 2 ein Winkelwert N einer Winkelstellung einer Auslösergrenzfläche 20 für einen Ladebereich 19 eines Anhängers 23 vorgegeben werden. Von der Steuerung 2 verarbeitbare Parameter für die Relativposition der zumindest einen Auslösergrenzfläche 20 relativ zu der Hebevorrichtung 1 können durch Sensoren der Hebevorrichtung 1 erfolgen. - Wie in den
Figuren 10a und 10c dargestellt ist, kann eine Benutzerschnittstelle 21 einer Steuerung 11 und/oder einer Fernsteuerung 22 der Steuerung 11 zeichenorientiert ausgeführt sein. Die Darstellungen in denFiguren 10a, 10b und 10c können Auswahlmöglichkeiten auf einer Anzeige der Benutzerschnittstelle 21 repräsentieren, die ein Benutzer bei einer im Wesentlichen geradlinigen Anordnung eines Fahrzeugs 17 mit einer Hebevorrichtung 1 und eines einen Ladebereich 19 aufweisenden Anhängers 23, bei einer Abwesenheit eines Anhängers 23, oder bei einer von einer geradlinigen Anordnung abweichenden Anordnung auswählen kann. -
- 1
- Hebevorrichtung
- 2
- Armsystem
- 3
- Last
- 4
- Basis
- 5
- Kransäule
- 6
- Hubarm
- 7
- Knickarm
- 8
- Schubarm
- 9
- Schubarm
- 10
- Arbeitsgerät
- 11
- Steuerung
- 12
- Recheneinheit
- 13
- Speichereinheit
- 14
- Aktuator
- 15
- Aktuator
- 16
- Lastseil
- 17
- Fahrzeug
- 18
- Spitze
- 19
- Ladebereich
- 20
- Auslösergrenzfläche
- 21
- Benutzerschnittstelle
- 22
- Funkfernsteuerung
- 23
- Anhänger
- P
- Punkt
- D
- Abstandswert
- N
- Winkelwert
- M
- Mittelpunkt
- R
- Radius
- m1, m2, m3
- Lastwerte
- m
- Lastwert
- w
- Schwenkwinkel
- k1, k2
- Knickwinkel
- s1, s2
- Schubstellung
- a
- Öffnungswinkel
- p1, p2
- Sensor
- d1, d2, d3, d4
- Sensor
- d5
- Sensor
- l1, l2
- Längensensor
- r6, r8, r9
- Auslagerung
- SP6, SP8, SP9
- Schwerpunkt
- r10
- Auslagerung
- SP10
- Schwerpunkt
- r15
- Auslagerung
- SP15
- Schwerpunkt
- r3
- Auslagerung
- SP3
- Schwerpunkt
- r14
- Auslagerung
- x
- Abstand
Claims (15)
- Verfahren zum Ausführen einer vorbestimmten oder vorbestimmbaren Funktion einer, vorzugsweise hydraulischen, Hebevorrichtung (1) in Abhängigkeiten zumindest einer Auslösergrenzfläche (20), wobei- eine Vorgabe (i) zumindest eines Parameters (D, N, M, R) für eine Relativposition der zumindest einen Auslösergrenzfläche (20) relativ zu der Hebevorrichtung (1) durch zumindest ein Sensorsignal eines mit einer Steuerung (11) der Hebevorrichtung (1) in Datenkommunikation stehenden Sensors (d1, d2, d3, d4, d5, l1, l2, p1, p2) der Hebevorrichtung (1) erfolgt und/oder über zumindest eine Benutzerschnittstelle (21) einer Steuerung (11) der Hebevorrichtung (1) durch einen Benutzer erfolgt- ein Erstellen (ii) der zumindest einen Auslösergrenzfläche (20) in Abhängigkeit des zumindest einen Parameters (D, N, M, R) erfolgt- ein Ausführen (iii) zumindest einer vorbestimmten oder vorbestimmbaren Funktion der Hebevorrichtung (1) bei einer Annäherung eines vorgegebenen oder vorgebbaren Punktes (P) eines Armsystems (2) der Hebevorrichtung (1) an die zumindest eine Auslösergrenzfläche (20) und/oder bei einem Durchtreten eines vorgegebenen oder vorgebbaren Punktes (P) eines Armsystems (2) der Hebevorrichtung (1) durch die zumindest eine Auslösergrenzfläche (20) erfolgt.
- Verfahren nach dem vorangehenden Anspruch, wobei bei dem Annähern und/oder dem Durchtreten eine Funktion zur Bestimmung zumindest eines Lastwertes (m1, m2, m3) einer von der hydraulischen Hebevorrichtung (1) angehobenen Last (3) ausgeführt wird.
- Verfahren nach einem der vorangehenden Ansprüche, wobei während des Annäherns und/oder des Durchtretens eine Bewegung eines Armsystems (2) der hydraulischen Hebevorrichtung (1) entlang zumindest eines Freiheitsgrades (w, k1, k2, s1, s2, a) der Bewegung des Armsystems (2) mit einer angehobenen Last (3) erfolgt, wobei während der Bewegung des Armsystems (2) zumindest eine Bestimmung der während der Bewegung vorherrschenden dynamischen Belastungsmomente der Arme (4, 5, 6, 7, 8, 9) des Armsystems (2) erfolgt, wobei unter Einbeziehung der dynamischen Belastungsmomente zumindest ein Lastwert (m1, m2, m3) für die angehobene Last (3) bestimmt wird.
- Verfahren nach einem der beiden vorangehenden Ansprüche, wobei- eine Aufzeichnung (iv) des zumindest einen Lastwerts (m1, m2, m3) in einer Lastwertfolge erfolgt- in Abhängigkeit der Annäherung und/oder des Durchtretens eine Auswahl (v) zumindest eines aufgezeichneten Lastwerts (m1, m2, m3) aus der Lastwertfolge erfolgt- ein bereinigter Lastwert (m) aus dem zumindest einen ausgewählten Lastwert (m1, m2, m3) bestimmt (vi) wird.
- Verfahren nach einem der vorangehenden Ansprüche, wobei während des Annäherns und/oder des Durchtretens eine Bewegung eines Armsystems (2) der hydraulischen Hebevorrichtung (1) entlang zumindest eines Freiheitsgrades (w, k1, k2, s1, s2, a) der Bewegung des Armsystems (2) erfolgt, wobei in zumindest einem Zeitintervall während der Bewegung des Armsystems (2) zumindest eine Erfassung der in dem zumindest einen Zeitintervall vorherrschenden Werte zumindest eines der Freiheitsgrade (w, k1, k2, s1, s2, a) der Bewegung des Armsystems (2) und zumindest eine Erfassung zumindest einer in dem zumindest einen Zeitintervall auf das Armsystem (2) wirkenden Kraft erfolgt.
- Verfahren nach den Ansprüchen 4 und 5, wobei eine Auswahl des zumindest eines aufgezeichneten Lastwerts (m1, m2, m3) aus der Lastwertfolge zusätzlich in Abhängigkeit zumindest eines der folgenden Auswahlkriterien umfasst:- eine Mindestdauer und/oder einen Maximaldauer für das zumindest eine Zeitintervall- eine Vorgabe eines Zeitintervalls durch eine Interaktion durch einen Benutzer- einen Minimalwert und/oder einen Maximalwert und/oder ein Intervall für die erfassten Werte des zumindest einen der Freiheitsgrade (w, k1, k2, s1, s2, a) der Bewegung des Armsystems- einen Minimalwert und/oder einen Maximalwert und/oder ein Intervall für die zumindest eine erfasste Kraft- einen Minimalwert und/oder einen Maximalwert und/oder ein Intervall für eine Änderungsrate der erfassten Werte des zumindest einen der Freiheitsgrade (w, k1, k2, s1, s2, a) der Bewegung des Armsystems- einen Minimalwert und/oder einen Maximalwert und/oder ein Intervall für eine Änderungsrate der zumindest einen erfassten Kraft
- Verfahren nach einem der vorangehenden Ansprüche, wobei die Vorgabe (i) des zumindest einen Parameters (D, N, M, R) über zumindest eine Benutzerschnittstelle (21) der Steuerung (2) der Hebevorrichtung (1) durch- eine Abgabe von Bedienbefehlen für eine Bewegung eines mehrere Freiheitsgrade (w, k1, k2, s1, s2, a) der Bewegung aufweisenden Armsystems (2) mit mehreren Armen (4, 5, 6, 7, 8, 9) entlang zumindest eines der Freiheitsgrade (w, k1, k2, s1, s2, a), und/oder- eine Eingabe zumindest eines Abstandswertes (D) und/oder eines Winkelwertes (N) für eine Relativposition der zumindest einen Auslösergrenzfläche (20) relativ zu der Hebevorrichtung (1)durch einen Benutzer erfolgt.
- Verfahren nach dem vorangehenden Anspruch, wobei die Vorgabe (i) des zumindest einen Parameters (D, N, M, R) durch eine Abgabe von Bedienbefehlen erfolgt und eine Bestimmung zumindest eines durch die Steuerung (11) verarbeitbaren Wertes des zumindest einen Parameters (D, N, M, R) durch Die Steuerung (11) und zumindest ein von einer Steuerung der Hebevorrichtung (1) erfassbares Sensorsignal zumindest eines an der Hebevorrichtung (1) angeordneten oder anordenbaren Sensors (d1, d2, d3, d4, d5, l1, l2, p1, p2) erfolgt.
- Verfahren nach einem der vorangehenden Ansprüche, wobei das Ausführen (iii) der zumindest einen vorbestimmten oder vorbestimmbaren Funktion der Hebevorrichtung (1) bei einer Annäherung an die zumindest eine Auslösergrenzfläche (20) innerhalb eines vorgegebenen oder vorgebbaren Abstands (x) eines vorgegebenen oder vorgebbaren Punktes (P) des Armsystems (2) der Hebevorrichtung (1) erfolgt.
- Verfahren nach einem der vorangehenden Ansprüche, wobei der vorgegebene oder vorgebbare Punkt (P) des Armsystems (2) der Hebevorrichtung (1) einer Position eines an der Hebevorrichtung (1) angeordneten Arbeitsgeräts (10), einer Position der Spitzte (18) des Armsystems (2) oder einem im Wesentlichen frei wählbaren Punkt (P) des Armsystems (2) entspricht.
- Verfahren nach einem der vorangehenden Ansprüche, wobei bei dem Erstellen (ii) der zumindest einen Auslösergrenzfläche (20) eine Grenzfläche (20) zwischen zumindest einem Teil eines Innenbereichs eines Ladebereichs (19) der Hebevorrichtung (1) und zumindest eines Teils eines Außenbereichs des Ladebereichs (19) der Hebevorrichtung (1) erstellt wird.
- Verfahren nach einem der vorangehenden Ansprüche, wobei- das Erstellen (ii) der zumindest einen Auslösergrenzfläche (20) durch eine Steuerung (11) der Hebevorrichtung (1) erfolgt und ein Erfassen des Annäherns und/oder des Durchtretens von der Steuerung (11) der Hebevorrichtung (1) erfolgt, und/oder- die zumindest eine vorbestimmte oder vorbestimmbare Funktion der Hebevorrichtung (1) von einer Steuerung (11) der Hebevorrichtung (1) ausgeführt (iii) wird
- Steuerung (11) für eine Hebevorrichtung (1), die Mittel zur Ausführung des Verfahrens nach einem der vorangehenden Ansprüche umfasst.
- Hebevorrichtung (1), vorzugsweise hydraulischer Kran, mit einer Steuerung (11) nach dem vorangehenden Anspruch.
- Fahrzeug (17) mit einer Hebevorrichtung (1) nach dem vorangehenden Anspruch.
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP23206953.4A EP4549366A1 (de) | 2023-10-31 | 2023-10-31 | Verfahren zum ausführen einer funktion |
| JP2024190769A JP7692522B2 (ja) | 2023-10-31 | 2024-10-30 | 機能を実施するための方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP23206953.4A EP4549366A1 (de) | 2023-10-31 | 2023-10-31 | Verfahren zum ausführen einer funktion |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| EP4549366A1 true EP4549366A1 (de) | 2025-05-07 |
Family
ID=88647502
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP23206953.4A Pending EP4549366A1 (de) | 2023-10-31 | 2023-10-31 | Verfahren zum ausführen einer funktion |
Country Status (2)
| Country | Link |
|---|---|
| EP (1) | EP4549366A1 (de) |
| JP (1) | JP7692522B2 (de) |
Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2015162096A1 (de) * | 2014-04-22 | 2015-10-29 | Terex Cranes Germany Gmbh | Verfahren und vorrichtung zum betreiben eines mobilkrans sowie mobilkran |
| EP4257755A1 (de) * | 2020-12-07 | 2023-10-11 | Sumitomo Heavy Industries, LTD. | Arbeitsmaschine und steuerungsvorrichtung für eine arbeitsmaschine |
Family Cites Families (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2004130945A (ja) * | 2002-10-10 | 2004-04-30 | Tadano Ltd | 旋回式作業車の走行ブレーキ装置 |
| JP2004332890A (ja) * | 2003-05-12 | 2004-11-25 | Mitsui Eng & Shipbuild Co Ltd | 上下動補償機能付巻上げ装置 |
| DE102010025022A1 (de) * | 2010-06-24 | 2011-12-29 | Hirschmann Automation And Control Gmbh | Verfahren zur Lastmomentbegrenzung eines Arbeitsfahrzeuges mit einem Ausleger |
| JP5953031B2 (ja) * | 2011-11-09 | 2016-07-13 | 古河ユニック株式会社 | クレーンの連動作動制御装置 |
-
2023
- 2023-10-31 EP EP23206953.4A patent/EP4549366A1/de active Pending
-
2024
- 2024-10-30 JP JP2024190769A patent/JP7692522B2/ja active Active
Patent Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2015162096A1 (de) * | 2014-04-22 | 2015-10-29 | Terex Cranes Germany Gmbh | Verfahren und vorrichtung zum betreiben eines mobilkrans sowie mobilkran |
| EP4257755A1 (de) * | 2020-12-07 | 2023-10-11 | Sumitomo Heavy Industries, LTD. | Arbeitsmaschine und steuerungsvorrichtung für eine arbeitsmaschine |
Also Published As
| Publication number | Publication date |
|---|---|
| JP7692522B2 (ja) | 2025-06-13 |
| JP2025076396A (ja) | 2025-05-15 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP3362400B1 (de) | Anordnung aus einer steuerung und einem mobilen steuerungsmodul | |
| DE102017128543B4 (de) | Störbereich-einstellvorrichtung für einen mobilen roboter | |
| DE102009037880B4 (de) | Mobile Arbeitsmaschine mit einer Regelvorrichtung mit einem Arbeitsarm und Verfahren zur Arbeitspunktregelung eines Arbeitsarms einer mobilen Arbeitsmaschine | |
| EP2422018B1 (de) | Mobile arbeitsmaschine mit einer positionsregeleinrichtung eines arbeitsarms und verfahren zur positionsregelung eines arbeitsarms einer mobilen arbeitsmaschine | |
| EP3440273B1 (de) | Verfahren zur steuerung der bewegung eines gelenkschlauchträgers eines saugbaggers | |
| EP3854943B1 (de) | Tiefbaugerät | |
| DE102017109939A1 (de) | Identifikation des Betriebs einer Arbeitsmaschine | |
| EP1537282A1 (de) | Vorrichtung zur betätigung eines knickmasts | |
| EP2736833B1 (de) | Steuervorrichtung | |
| EP1906281B1 (de) | Verfahren und System zur Auslegung und Überprüfung von Sicherheitsbereichen eines Roboters | |
| WO2008122448A1 (de) | Verfahren zur bestimmung von massenschwerpunkten bei grossstrukturen | |
| DE112011104025T5 (de) | Hubarm-und Werkzeugsteuersystem | |
| WO2019136505A1 (de) | Hebevorrichtung | |
| DE102022120687A1 (de) | Arbeitsfahrzeuggabelausrichtungssystem und -verfahren | |
| EP4130394B1 (de) | Verfahren zur überwachung und/oder durchführung einer bewegung eines arbeitsgeräts sowie arbeitsgerät und computerprogrammprodukt | |
| DE102016004466A1 (de) | Verfahren zum Bewegen des letzten Gliedes einer kinematischen Kette sowie Vorrichtung und Arbeitsmaschine zum Durchführen des Verfahrens | |
| EP4522546B1 (de) | Verfahren zum bewegen einer hebevorrichtung | |
| EP4549366A1 (de) | Verfahren zum ausführen einer funktion | |
| DE102007042247A1 (de) | Vorrichtung zum handgeführten Bewegen von Lasten in lateraler Richtung | |
| EP3417685B1 (de) | Verfahren zur bestimmung einer physikalischen grösse eines oberlenkers | |
| EP4549365A1 (de) | Verfahren zur bestimmung einer last | |
| EP0062657B1 (de) | Steuerung fpr handhabungssysteme und handhabungssystem mit einer derartigen steuerung | |
| DE10302592A1 (de) | Verfahren und Vorrichtung zum Betreiben eines Arbeitsroboters | |
| EP3395136A1 (de) | Verfahren zum einstellen der arbeitstiefe eines landwirtschaftlichen bodenbearbeitungsgeräts | |
| EP1416095B1 (de) | Arbeitsfahrzeug, insbesondere ein Tieflöffelbagger und/oder ein Fahrzeug mit einem Frontlader |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: THE APPLICATION HAS BEEN PUBLISHED |
|
| AK | Designated contracting states |
Kind code of ref document: A1 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC ME MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: REQUEST FOR EXAMINATION WAS MADE |
|
| 17P | Request for examination filed |
Effective date: 20251107 |