EP4339066A1 - Dynamics model for a rail vehicle - Google Patents
Dynamics model for a rail vehicle Download PDFInfo
- Publication number
- EP4339066A1 EP4339066A1 EP22195763.2A EP22195763A EP4339066A1 EP 4339066 A1 EP4339066 A1 EP 4339066A1 EP 22195763 A EP22195763 A EP 22195763A EP 4339066 A1 EP4339066 A1 EP 4339066A1
- Authority
- EP
- European Patent Office
- Prior art keywords
- time course
- value
- driving value
- model
- driving
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images

Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B61—RAILWAYS
- B61L—GUIDING RAILWAY TRAFFIC; ENSURING THE SAFETY OF RAILWAY TRAFFIC
- B61L27/00—Central railway traffic control systems; Trackside control; Communication systems specially adapted therefor
- B61L27/60—Testing or simulation
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B61—RAILWAYS
- B61L—GUIDING RAILWAY TRAFFIC; ENSURING THE SAFETY OF RAILWAY TRAFFIC
- B61L15/00—Indicators provided on the vehicle or train for signalling purposes
- B61L15/0058—On-board optimisation of vehicle or vehicle train operation
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B61—RAILWAYS
- B61L—GUIDING RAILWAY TRAFFIC; ENSURING THE SAFETY OF RAILWAY TRAFFIC
- B61L15/00—Indicators provided on the vehicle or train for signalling purposes
- B61L15/0081—On-board diagnosis or maintenance
Definitions
- the invention relates to a method for creating a dynamic model of a rail vehicle, a method for operating a rail vehicle, a control unit for a rail vehicle and a rail vehicle.
- the characteristics of the dynamics can include which control values of control elements of the rail vehicle result in which driving values. For example, it is advantageous to know which position of a drive lever leads to which speeds and/or accelerations, or which position of a brake lever leads to which decelerations. The position of the drive or brake lever can then be a control value, and the speed, acceleration or deceleration can be a driving value.
- the characteristics of the dynamics can be stored in a dynamics model of the rail vehicle.
- the dynamic model can be used to calculate associated driving values using predetermined driving values or to calculate associated driving values using predetermined driving values.
- the invention is based on the object of providing a method for creating a dynamic model of a rail vehicle, in which the dynamic model is created automatically and so effort and costs can be reduced.
- a further object of the invention is to provide a method for operating a rail vehicle that uses such a dynamic model.
- a further object of the invention is to provide a control unit that can be used in these methods.
- Another object of the invention is to provide a rail vehicle.
- the invention relates to a method for creating a dynamic model of a rail vehicle, the dynamic model comprising at least one model parameter.
- the procedure for creating a dynamics model includes the following steps.
- the dynamics model is initialized with the model parameter.
- recorded data from the rail vehicle is read in, the recorded data comprising a time course of at least one control value and a time course of at least one driving value of the rail vehicle.
- the data recorded may have been generated during test drives or during regular operation of the rail vehicle.
- the time course of the control value is then entered into the dynamic model and a model course of the driving value is calculated from it. Then the modeled time course of the driving value and the recorded time course of the driving value are compared with one another.
- the dynamic model is stored in a memory. In this case, it can be assumed that the dynamics model is sufficiently accurate and the dynamics model can therefore be stored for later use. In the event that the modeled time course of the driving value and the recorded time course of the driving value deviate from each other by more than a predetermined deviation, the model parameter is adjusted. The dynamics model is then updated with the adjusted model parameters.
- the time course of the control value is now entered into the updated dynamic model and an updated modeled time course of the driving value is calculated from it.
- the updated modeled time course of the driving value and the recorded time course of the driving value can then be compared with one another. If necessary, the updated dynamic model can now be stored in the memory.
- the dynamics model is created using this method provides a simple way to create a dynamics model for a rail vehicle.
- the initialization with the model parameter takes place on the basis of fundamental considerations as to how the rail vehicle could possibly function. If necessary, adjusting the model parameter, updating the dynamic model with the adapted model parameter, entering the time course of the control value into the updated dynamic model, calculating the updated modeled time course of the driving value from it and comparing the updated modeled time course of the driving value and the recorded time course of the driving value can be carried out several times with one another.
- model parameters can also be used be provided, wherein in the event that the modeled time course of the driving value and the recorded time course of the driving value deviate from each other by more than a predetermined deviation, one of the model parameters, several of the model parameters or all model parameters are changed.
- the recorded data when creating the recorded data, predetermined driving situations are run through so that the recorded data is as relevant as possible for creating the dynamic model.
- the recorded data may have been created during regular operation of the rail vehicle. The latter can be particularly advantageous if the rail vehicle is already in use.
- the dynamics model is created using the recorded data, it may be that an influence of a train driver on the energy consumption of the rail vehicle can be negated, since in addition to the actual value of the energy consumption, an optimal energy consumption calculated according to the dynamics model is also available.
- the method can be used to describe a relationship between control values of operating elements of the rail vehicle and driving values of the rail vehicle using the dynamic model. For example, it can be determined which position of a driving lever leads to which speeds and/or accelerations or which position of a brake lever leads to which decelerations.
- a control value can therefore be the position of the driving lever or the position of the brake lever, and a driving value can be the speed, acceleration or deceleration.
- a control value is the set value of a control element.
- the driving value generally refers to a value that describes the movement of the rail vehicle.
- the dynamics model can be used to determine associated driving values using specified driving values To calculate control values or to calculate associated driving values using specified control values.
- the dynamic model is updated iteratively. This can be done in particular by carrying out several runs of the method, with the specified deviations being reduced in each case in order to ultimately obtain a dynamic model that fits as well as possible.
- the memory is arranged in the rail vehicle.
- the method can then be carried out by a computing unit in the rail vehicle, for example a control unit of the rail vehicle, during a journey, in particular the test journey.
- the method can also be carried out by a computing unit arranged outside a rail vehicle.
- the dynamics model can then be transferred to a memory in the rail vehicle.
- the dynamic model is further updated during operation of the rail vehicle. This allows, for example, the dynamic model to be adjusted automatically in the event of aging/wear and/or modifications.
- the dynamics model then updates itself independently and is always up to date. This enables improved creation of the dynamics model.
- information relating to the changed dynamic model is output in order, for example, to enable wear management of the rail vehicle.
- further recorded data from the rail vehicle is read in to update the dynamic model.
- the further recorded data include a further time course of at least one control value and a further time course of at least one driving value of the rail vehicle.
- the control value and the Driving values can be identical to the initially used control value and driving value.
- the further time course of the control value is entered into the dynamic model in the memory and a further modeled time course of the driving value is calculated from this.
- the further modeled time course of the driving value and the further recorded time course of the driving value are compared.
- the model parameter is adjusted, the dynamic model is further updated with the adapted model parameter, the further time course of the manipulated value entered into the further updated dynamic model, and a further updated modeled time course of the driving value is calculated from this.
- the further updated modeled time course of the driving value and the further recorded time course of the driving value are compared. If necessary, the model parameter is then adjusted and the process is repeated or the updated dynamic model is stored in the memory.
- the dynamic model includes several model parameters. It is also checked whether all model parameters have an influence on the modeled time course of the driving value. The dynamics model is only stored in the memory when all model parameters have an influence on the modeled time course of the driving value. In this case, it can be assumed that enough recorded data was used to determine the dynamics model sufficiently well and that all relevant driving situations were present in the recorded data.
- the model parameters are varied when checking whether all model parameters have an influence on the modeled time course of the driving value. It is assumed that a model parameter has an influence on the modeled time course if a varied model parameter leads to a changed modeled time course.
- the model parameters are varied individually in order to be able to identify the influence of the individual model parameters on the dynamics model and thus their measurement uncertainty.
- the modeled time course of the driving value is calculated using a neural network.
- Neural networks are particularly suitable for determining a connection between the control values and the driving values if no other knowledge about the dynamic model is available.
- the invention further relates to a method for operating a rail vehicle, wherein the rail vehicle comprises a control unit with a memory.
- a dynamic model of the rail vehicle created using the method according to the invention for creating a dynamic model is stored in the memory.
- the control unit selects a driving value, uses the dynamics model to calculate a control value with which the driving value is achieved and then sets the control value based on the calculation. This can be used, for example, in automated control of the rail vehicle.
- control unit checks the dynamics model based on driving values and control values and, if necessary, adapts the dynamics model if there are deviations. This can be done, for example, using the described method for creating the dynamics model.
- an adapted dynamic model is sent to a central processing unit via a radio connection.
- the central processing unit is then, if necessary, set up to output findings from the adapted dynamic model, in particular adapted model parameters, to other rail vehicles.
- control unit is given a driving value profile, wherein the control unit calculates a control value profile from the driving value profile using the dynamic model.
- the control unit then provides the control value profile.
- the control value profile can correspond to changes in the control value over time.
- the driving value profile can correspond to changes in the driving value over time and can be predetermined, for example, by a route (for example due to speed limits) or by a timetable.
- control unit detects deviations between driving values calculated from the control values and real driving values and outputs information.
- the information can, for example, be output to a train driver by means of a display or acoustically and thus draw attention to faulty or critical conditions of the rail vehicle.
- the invention also relates to a computer program product with program instructions for carrying out the method according to the invention and/or its exemplary embodiments, wherein the method according to the invention and/or its exemplary embodiments can be carried out by means of the computer program product.
- the invention also relates to a provision device for storing and/or providing the computer program product.
- the provision device is, for example, a data storage medium that stores and/or provides the computer program product.
- the provision device is, for example, a network service, a computer system, a server system, in particular a distributed computer system, a cloud-based computer system and/or virtual computer system, which stores and/or provides the computer program product, preferably in the form of a data stream.
- the invention further comprises a control unit for a rail vehicle, which is set up to load a dynamic model from a memory, select a driving value, use the dynamic model to calculate a control value with which the driving value is achieved and then set the control value. Furthermore, it can be provided that the control unit is also set up to carry out the method according to the invention for operating a rail vehicle and/or to carry out the method according to the invention for creating a dynamic model of the rail vehicle. In particular, the control unit can be set up to check the dynamic model by comparing the driving values expected based on the set control values with real driving values and then, if necessary, adapting the dynamic model in the event of a deviation.
- the invention further includes a rail vehicle with a control unit according to the invention.
- FIG 1 shows a flowchart 100 of a method for creating a dynamic model of a rail vehicle, the dynamic model comprising at least one model parameter.
- a first method step 105 the dynamics model is initialized with the model parameter.
- a second method step 110 is carried out, in which recorded data of the rail vehicle is read in, the recorded data comprising a time course of at least one control value and a time course of at least one driving value of the rail vehicle.
- the data recorded may have been generated during test drives or during regular operation of the rail vehicle.
- a subsequent third method step 115 the time course of the control value is entered into the dynamics model and a modeled time course of the driving value is calculated from it.
- a subsequent fourth method step 120 the modeled time course of the driving value and the recorded time course of the driving value are compared with one another. In this comparison, provision can be made to check whether the modeled time course of the driving value corresponds sufficiently well with the recorded time course of the driving value, for example in that there is a deviation of the modeled time course of the driving value from the recorded time course of the driving value.
- a fifth method step 125 is carried out, in which the dynamic model is stored in a memory.
- the dynamics model is sufficiently accurate and the dynamics model can therefore be stored for later use.
- a sixth method step 130 is carried out.
- the model parameter is adjusted.
- the dynamic model is updated with the adjusted model parameters.
- the method is then continued with the third method step 115, whereby the time course of the control value is again entered into the now updated dynamic model and an updated modeled time course of the driving value is calculated from it.
- the fourth method step 120 is then carried out again and the updated modeled time course of the driving value and the recorded time course of the driving value are compared with one another. If the updated modeled time course of the driving value and the recorded time course of the driving value deviate from each other by a maximum of a predetermined deviation, the fifth method step 125 can now be carried out. Otherwise, the sixth method step 130, the third method step 115 and the fourth method step 120 are carried out again, if necessary until the updated modeled time course of the driving value and the recorded time course of the driving value only differ from each other by the predetermined deviation. As soon as the updated modeled time course of the driving value and the recorded time course of the driving value only differ from each other by the specified deviation, the fifth method step 125 can be carried out.
- the dynamics model is created using this method provides a simple way to create a dynamics model for a rail vehicle.
- the initialization with the model parameter in the first method step 105 takes place on the basis of fundamental considerations as to how the rail vehicle could possibly function.
- several model parameters can also be provided, whereby in the event that the modeled time course of the driving value and the recorded time course of the driving value deviate from one another by more than a predetermined deviation, one of the model parameters, several of the model parameters or all model parameters are changed.
- predetermined driving situations are run through so that the captured data is as relevant as possible for creating the dynamic model.
- the recorded data may have been created during regular operation of the rail vehicle. The latter can be particularly advantageous if the rail vehicle is already in use.
- the dynamics model is created using the recorded data, it may be that an influence of a locomotive driver on the energy consumption of the rail vehicle can be negated, since in addition to the actual value of the energy consumption, an energy consumption calculated according to the dynamics model is also available.
- FIG 1 further optional method steps 135, 140, 145, 150 are shown. These, together with further options for the already mentioned method steps 105, 110, 115, 120, 125, 130, are explained below.
- the dynamic model is updated iteratively. This can be done in particular in that after the updated modeled time course of the driving value and the recorded time course of the driving value only differ from each other by the predetermined deviation, the predetermined deviation relevant to the fourth method step 120 is reduced, so that the sixth method step 130, which third method step 115 and the fourth method step 120 are carried out further. Several runs of the method or these method steps can then be carried out, with the specified deviations being further reduced if the previous specified deviation is not reached. After falling below a termination deviation, a dynamic model that fits as well as possible is then achieved, which can then be stored in the memory in the fifth method step 125.
- the memory is arranged in the rail vehicle.
- the method can then be carried out by a computing unit in the rail vehicle, for example a control unit of the rail vehicle, during a journey, in particular the test journey.
- the method can also be carried out by a computing unit arranged outside a rail vehicle.
- the dynamics model can then be transferred to a memory in the rail vehicle.
- the dynamic model is further updated during operation of the rail vehicle.
- the dynamic model previously stored in the fifth method step 125 is initialized and then in a seventh method step 135, further recorded data from the rail vehicle is read in.
- the dynamics model can then be further updated using the third method step 115, the fourth method step 120 and, if necessary, the sixth method step 130 and is therefore always up to date.
- information relating to the changed dynamic model is output in an eighth method step 140, for example to enable wear management of the rail vehicle. This output can be made to the driver or to a central location.
- control value and the driving value can be identical to the control value and driving value used initially.
- the further time course of the control value is entered into the dynamic model from the memory in the third method step 115 and a further modeled time course of the driving value is calculated from it.
- the further modeled time course of the driving value and the further recorded time course of the driving value are compared in the fourth method step 120.
- the fifth method step 125 is carried out if the further modeled time course of the driving value and the further recorded time course of the driving value deviate from each other by a maximum of a further predetermined deviation, or the sixth method step 130 and subsequently the third method step 115 and the fourth method step 120 carried out if the further recorded time course of the driving value deviates from one another by more than a further predetermined deviation.
- the model parameter is adjusted and the dynamic model is further updated with the adjusted model parameter.
- the further time course of the control value is then entered into the further updated dynamic model and a further updated modeled time course of the driving value is calculated from it.
- the further updated modeled time course of the driving value and the further recorded time course of the driving value are compared. If necessary, the model parameter is then adjusted and the method is repeated via the sixth method step 130 or the further updated dynamic model is stored in the memory in the fifth method step 125.
- the dynamics model includes several model parameters.
- a ninth method step 145 after the fourth method step 120, it is further checked whether all model parameters have an influence on the modeled time course of the driving value.
- the dynamics model is only stored in memory when all model parameters have an influence have the modeled time course of the driving value. In this case, it can be assumed that enough recorded data was used to determine the dynamics model sufficiently well and that all relevant driving situations were present in the recorded data.
- the fifth method step 125 is carried out. If not all model parameters yet have an influence on the modeled time course of the driving value, the method is continued after the ninth method step 145 with the third method step 115, after either the second method step 110 or the seventh method step 135 have been carried out again, i.e. further recorded data To be available.
- model parameters are varied in the ninth method step 145. It is assumed that a model parameter has an influence on the modeled time course if a varied model parameter leads to a changed modeled time course. It can be provided that the model parameters are varied individually, in particular, in order to be able to recognize the influence of the individual model parameters on the dynamic model.
- the modeled time course of the driving value is calculated in the third method step 115 using a neural network.
- Neural networks are particularly suitable for determining a connection between the control values and the driving values if no other knowledge about the dynamic model is available.
- an optional tenth method step 150 can be provided, in which the dynamics model stored in the memory is output to a central processing unit.
- the tenth method step can in particular be carried out after the fifth method step 125. It can be provided that the tenth method step 150 always is then executed when the dynamics model changes and then the in FIG 1 The method shown leads to a renewed storage of an updated dynamic model.
- FIG 2 shows a flowchart 100 of a method for operating a rail vehicle.
- the rail vehicle includes a control unit with a memory.
- memory is a related to FIG 1
- the dynamic model of the rail vehicle created in the procedure explained for creating a dynamic model is stored. If necessary, if this is in FIG 1
- the method shown was also carried out by the control unit of the rail vehicle in FIG 2 procedure shown directly to the in FIG 1 Connect the procedures shown.
- the control unit loads the dynamics model from the memory.
- the control unit selects a driving value in a twelfth method step 160, calculates in a thirteenth method step 165 using the dynamic model a control value with which the driving value is achieved and in a subsequent fourteenth method step 170 sets the control value based on the calculation. This can be used, for example, in automated control of the rail vehicle.
- FIG 2 further optional method steps 175, 180 are shown. These are explained below, together with further options for the method steps 155, 160, 165, 170 already mentioned.
- control unit is given a driving value profile in the twelfth method step 160.
- the control unit calculates a control value profile from the driving value profile using the dynamic model.
- the control unit sets the control value profile in the fourteenth method step 170.
- the control value profile can correspond to changes in the control value over time.
- the driving value profile can correspond to changes in the driving value over time and, for example, through a route (for example due to speed limits) or by a timetable.
- the control unit checks the dynamics model based on driving values and control values and, if necessary, adapts the dynamics model if there are deviations. This can be done, for example, by means of the in connection with FIG 1 described method for creating the dynamics model.
- the driving values relevant for the twelfth method step 160 are made available in the fifteenth method step 175.
- an adapted dynamic model is sent to a central processing unit by means of a radio connection in a sixteenth method step 180.
- the central processing unit is then, if necessary, set up to output findings from the adapted dynamic model, in particular adapted model parameters, to other rail vehicles.
- control unit determines deviations between driving values calculated from the control values and real driving values and outputs information in a seventeenth method step 185.
- the information can, for example, be output to a driver by means of a display or acoustically.
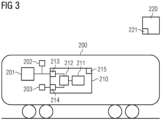
- FIG 3 shows a rail vehicle 200 with a control unit 210 for the rail vehicle 200.
- the control unit 210 is set up to load a dynamic model from a memory 211.
- the control unit has a processor 212, which is set up in FIG 1 method shown and/or that in FIG 2 carry out the procedures shown.
- the processor 212 can be set up to select a driving value, to use the dynamics model to calculate a control value with which the driving value is achieved and then to set the control value by outputting the control value via an output 213 to a drive 201 of the rail vehicle.
- the control value can be output to a braking device 202 via the output 213.
- control unit 210 can also be set up to check the dynamic model by comparing the driving values expected based on the set control values with real driving values, which are determined by means of a sensor 203 and read in via an input 214, and then, if necessary, the dynamic model in connection with FIG 1 explained, adjusted.
- the control unit 210 also has a radio module 215 with which the dynamics model can be sent to a central processing unit 220. This also has a radio module 221 for this purpose. Furthermore, it can be provided that the control unit 210 receives a dynamics model from the central processing unit 220.
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Health & Medical Sciences (AREA)
- Biomedical Technology (AREA)
- General Health & Medical Sciences (AREA)
- Feedback Control In General (AREA)
Abstract
Die Erfindung betrifft ein Verfahren zum Erstellen eines Dynamikmodells eines Schienenfahrzeuges, wobei das Dynamikmodell zumindest einen Modellparameter umfasst. Das Dynamikmodell wird mit dem Modellparameter initialisiert. Ferner werden erfasste Daten des Schienenfahrzeugs eingelesen, wobei die erfassten Daten einen zeitlichen Verlauf zumindest eines Stellwerts und einen zeitlichen Verlauf zumindest eines Fahrwerts des Schienenfahrzeugs umfassen. Anschließend wird der zeitliche Verlauf des Stellwerts in das Dynamikmodell eingegeben und ein modellierter zeitlicher Verlauf des Fahrwerts daraus berechnet. Dann wird der modellierte zeitliche Verlauf des Fahrwerts und der erfasste zeitliche Verlauf des Fahrwerts miteinander verglichen. Für den Fall, dass der modellierte zeitliche Verlauf des Fahrwerts und der erfasste zeitliche Verlauf des Fahrwerts maximal um eine vorgegebene Abweichung voneinander abweichen wird das Dynamikmodell in einem Speicher abgelegt. Für den Fall, dass der modellierte zeitliche Verlauf des Fahrwerts und der erfasste zeitliche Verlauf des Fahrwerts um mehr als eine vorgegebene Abweichung voneinander abweichen wird der Modellparameter angepasst und das Verfahren erneut durchgeführt.The invention relates to a method for creating a dynamic model of a rail vehicle, the dynamic model comprising at least one model parameter. The dynamics model is initialized with the model parameter. Furthermore, recorded data of the rail vehicle is read in, the recorded data comprising a time course of at least one control value and a time course of at least one driving value of the rail vehicle. The time course of the control value is then entered into the dynamics model and a modeled time course of the driving value is calculated from it. Then the modeled time course of the driving value and the recorded time course of the driving value are compared with one another. In the event that the modeled time course of the driving value and the recorded time course of the driving value differ from each other by a maximum of a predetermined deviation, the dynamic model is stored in a memory. In the event that the modeled time course of the driving value and the recorded time course of the driving value differ from each other by more than a predetermined deviation, the model parameter is adjusted and the method is carried out again.
Description
Die Erfindung betrifft ein Verfahren zum Erstellen eines Dynamikmodells eines Schienenfahrzeuges, ein Verfahren zum Betreiben eines Schienenfahrzeugs, eine Steuereinheit für ein Schienenfahrzeug sowie ein Schienenfahrzeug.The invention relates to a method for creating a dynamic model of a rail vehicle, a method for operating a rail vehicle, a control unit for a rail vehicle and a rail vehicle.
Um Schienenfahrzeuge effizient zu betreiben ist es notwendig, eine Charakteristik der Dynamik des Schienenfahrzeugs zu kennen. Insbesondere kann die Charakteristik der Dynamik umfassen, welche Stellwerte von Bedienelementen des Schienenfahrzeugs welche Fahrwerte zur Folge haben. Beispielsweise ist es vorteilhaft, zu wissen, welche Stellung eines Fahrhebels zu welchen Geschwindigkeiten und/oder Beschleunigungen führt, oder welche Stellung eines Bremshebels zu welchen Verzögerungen führt. Die Stellung des Fahr- beziehungsweise des Bremshebels kann dann ein Stellwert sein, die Geschwindigkeit, Beschleunigung oder Verzögerung ein Fahrwert. Die Charakteristik der Dynamik kann in einem Dynamikmodell des Schienenfahrzeugs hinterlegt sein. Das Dynamikmodell kann dazu dienen, mittels vorgegebener Fahrwerte zugehörige Stellwerte zu berechnen oder mittels vorgegebener Stellwerte zugehörige Fahrwerte zu berechnen.In order to operate rail vehicles efficiently, it is necessary to know a characteristic of the dynamics of the rail vehicle. In particular, the characteristics of the dynamics can include which control values of control elements of the rail vehicle result in which driving values. For example, it is advantageous to know which position of a drive lever leads to which speeds and/or accelerations, or which position of a brake lever leads to which decelerations. The position of the drive or brake lever can then be a control value, and the speed, acceleration or deceleration can be a driving value. The characteristics of the dynamics can be stored in a dynamics model of the rail vehicle. The dynamic model can be used to calculate associated driving values using predetermined driving values or to calculate associated driving values using predetermined driving values.
Hersteller von Schienenfahrzeugen haben im Regelfall genügend Kenntnis über das Schienenfahrzeug, um ein Dynamikmodell bereitzustellen. Allerdings kann diese Kenntnis der Geheimhaltung unterliegen, verloren gegangen sein, da der Hersteller beispielsweise den Betrieb eingestellt hat und/oder veraltet sein, da das Schienenfahrzeug verändert ist, beispielsweise aufgrund von Alterung/Verschleiß und/oder aufgrund von vorgenommenen Modifikationen. In diesen Fällen steht gegebenenfalls nur ein veraltetes oder überhaupt kein Dynamikmodell zur Verfügung. Es ist ferner möglich, ein Dynamikmodell für ein Schienenfahrzeug zu bestimmen, indem Stellwerte und Fahrwerte verglichen werden und Zusammenhänge erkannt werden.Manufacturers of rail vehicles usually have enough knowledge about the rail vehicle to provide a dynamics model. However, this knowledge may be subject to confidentiality, may have been lost because, for example, the manufacturer has ceased operations and/or may be outdated because the rail vehicle has changed, for example due to aging/wear and/or due to modifications made. In these cases, only an outdated dynamic model or no dynamic model at all may be available. It is also possible to determine a dynamic model for a rail vehicle by comparing control values and driving values and recognizing relationships.
Dieses Verfahren ist jedoch aufwändig und mit hohen Kosten verbunden.However, this process is complex and involves high costs.
Der Erfindung liegt die Aufgabe zugrunde, ein Verfahren zum Erstellen eines Dynamikmodells eines Schienenfahrzeuges bereitzustellen, bei dem das Dynamikmodell automatisiert erstellt wird und so ein Aufwand beziehungsweise Kosten reduziert sein können. Eine weitere Aufgabe der Erfindung ist es, ein Verfahren zum Betreiben eines Schienenfahrzeugs bereitzustellen, das ein solches Dynamikmodell nutzt. Eine weitere Aufgabe der Erfindung ist es, eine Steuereinheit bereitzustellen, die in diesen Verfahren eingesetzt werden kann. Eine weitere Aufgabe der Erfindung ist es, ein Schienenfahrzeug bereitzustellen.The invention is based on the object of providing a method for creating a dynamic model of a rail vehicle, in which the dynamic model is created automatically and so effort and costs can be reduced. A further object of the invention is to provide a method for operating a rail vehicle that uses such a dynamic model. A further object of the invention is to provide a control unit that can be used in these methods. Another object of the invention is to provide a rail vehicle.
Diese Aufgaben werden mit den Gegenständen der unabhängigen Patentansprüche gelöst. Vorteilhafte Weiterbildungen sind in den abhängigen Ansprüchen angegeben.These tasks are solved with the subject matter of the independent patent claims. Advantageous further developments are specified in the dependent claims.
Die Erfindung betrifft ein Verfahren zum Erstellen eines Dynamikmodells eines Schienenfahrzeuges, wobei das Dynamikmodell zumindest einen Modellparameter umfasst. Das Verfahren zum Erstellen eines Dynamikmodells umfasst die folgenden Schritte. Das Dynamikmodell wird mit dem Modellparameter initialisiert. Gleichzeitig, davor oder danach werden erfasste Daten des Schienenfahrzeugs eingelesen, wobei die erfassten Daten einen zeitlichen Verlauf zumindest eines Stellwerts und einen zeitlichen Verlauf zumindest eines Fahrwerts des Schienenfahrzeugs umfassen. Die erfassten Daten können dabei während Testfahrten oder im regulären Betrieb des Schienenfahrzeugs generiert worden sein. Anschließend wird der zeitliche Verlauf des Stellwerts in das Dynamikmodell eingegeben und ein Modellverlauf des Fahrwerts daraus berechnet. Dann wird der modellierte zeitliche Verlauf des Fahrwerts und der erfasste zeitliche Verlauf des Fahrwerts miteinander verglichen. Bei diesem Vergleich kann vorgesehen sein, zu überprüfen, ob der modellierte zeitliche Verlauf des Fahrwerts mit dem erfassten zeitlichen Verlauf des Fahrwerts ausreichend gut übereinstimmt, beispielsweise indem eine Abweichung des modellierten zeitlichen Verlaufs des Fahrwerts vom erfassten zeitlichen Verlauf des Fahrwerts vorliegt. Für den Fall, dass der modellierte zeitliche Verlauf des Fahrwerts und der erfasste zeitliche Verlauf des Fahrwerts maximal um eine vorgegebene Abweichung voneinander abweichen wird das Dynamikmodell in einem Speicher abgelegt. In diesem Fall kann davon ausgegangen werden, dass das Dynamikmodell ausreichend genau ist und somit das Dynamikmodell für eine spätere Anwendung abgelegt werden kann. Für den Fall, dass der modellierte zeitliche Verlauf des Fahrwerts und der erfasste zeitliche Verlauf des Fahrwerts um mehr als eine vorgegebene Abweichung voneinander abweichen wird der Modellparameter angepasst. Das Dynamikmodell wird dann mit dem angepassten Modellparameter fortgeschrieben. Der zeitliche Verlauf des Stellwerts wird nun in das fortgeschriebene Dynamikmodell eingegeben und ein fortgeschriebener modellierte zeitliche Verlauf des Fahrwerts daraus berechnet. Anschließend können der fortgeschriebene modellierte zeitliche Verlauf des Fahrwerts und der erfasste zeitliche Verlauf des Fahrwerts miteinander verglichen werden. Gegebenenfalls kann nun das fortgeschriebene Dynamikmodell im Speicher abgelegt werden.The invention relates to a method for creating a dynamic model of a rail vehicle, the dynamic model comprising at least one model parameter. The procedure for creating a dynamics model includes the following steps. The dynamics model is initialized with the model parameter. At the same time, before or after, recorded data from the rail vehicle is read in, the recorded data comprising a time course of at least one control value and a time course of at least one driving value of the rail vehicle. The data recorded may have been generated during test drives or during regular operation of the rail vehicle. The time course of the control value is then entered into the dynamic model and a model course of the driving value is calculated from it. Then the modeled time course of the driving value and the recorded time course of the driving value are compared with one another. In this comparison, provision can be made to check whether the modeled time course of the driving value is sufficient with the recorded time course of the driving value matches well, for example in that there is a deviation of the modeled time course of the driving value from the recorded time course of the driving value. In the event that the modeled time course of the driving value and the recorded time course of the driving value differ from each other by a maximum of a predetermined deviation, the dynamic model is stored in a memory. In this case, it can be assumed that the dynamics model is sufficiently accurate and the dynamics model can therefore be stored for later use. In the event that the modeled time course of the driving value and the recorded time course of the driving value deviate from each other by more than a predetermined deviation, the model parameter is adjusted. The dynamics model is then updated with the adjusted model parameters. The time course of the control value is now entered into the updated dynamic model and an updated modeled time course of the driving value is calculated from it. The updated modeled time course of the driving value and the recorded time course of the driving value can then be compared with one another. If necessary, the updated dynamic model can now be stored in the memory.
Dadurch, dass das Dynamikmodell mit diesem Verfahren erstellt wird, ist eine einfache Möglichkeit gegeben, ein Dynamikmodell für ein Schienenfahrzeug zu erstellen. Insbesondere kann dabei vorgesehen sein, dass das Initialisieren mit dem Modellparameter anhand von grundsätzlichen Erwägungen, wie das Schienenfahrzeug gegebenenfalls funktionieren könnte, erfolgt. Gegebenenfalls können das Anpassen des Modellparameters, das Fortschreiben des Dynamikmodells mit dem angepassten Modellparameter, das Eingeben des zeitlichen Verlaufs des Stellwerts in das fortgeschriebene Dynamikmodell, die Berechnung des ein fortgeschriebener modellierte zeitliche Verlauf des Fahrwerts daraus und der Vergleich des fortgeschriebenen modellierten zeitlichen Verlaufs des Fahrwerts und des erfassten zeitlichen Verlaufs des Fahrwerts miteinander mehrfach durchgeführt werden. Ferner können auch mehrere Modellparameter vorgesehen sein, wobei für den Fall, dass der modellierte zeitliche Verlauf des Fahrwerts und der erfasste zeitliche Verlauf des Fahrwerts um mehr als eine vorgegebene Abweichung voneinander abweichen einer der Modellparameter, mehrere der Modellparameter oder alle Modellparameter verändert werden.The fact that the dynamics model is created using this method provides a simple way to create a dynamics model for a rail vehicle. In particular, it can be provided that the initialization with the model parameter takes place on the basis of fundamental considerations as to how the rail vehicle could possibly function. If necessary, adjusting the model parameter, updating the dynamic model with the adapted model parameter, entering the time course of the control value into the updated dynamic model, calculating the updated modeled time course of the driving value from it and comparing the updated modeled time course of the driving value and the recorded time course of the driving value can be carried out several times with one another. Furthermore, several model parameters can also be used be provided, wherein in the event that the modeled time course of the driving value and the recorded time course of the driving value deviate from each other by more than a predetermined deviation, one of the model parameters, several of the model parameters or all model parameters are changed.
Es kann vorgesehen sein, dass bei der Erstellung der erfassten Daten vorgegebene Fahrsituationen durchlaufen werden, damit die erfassten Daten möglichst relevant zur Erstellung des Dynamikmodells sind. Alternativ oder zusätzlich können die erfassten Daten während eines regulären Betriebs des Schienenfahrzeugs erstellt worden sein. Letzteres kann insbesondere dann vorteilhaft sein, wenn das Schienenfahrzeug bereits eingesetzt wird.It can be provided that when creating the recorded data, predetermined driving situations are run through so that the recorded data is as relevant as possible for creating the dynamic model. Alternatively or additionally, the recorded data may have been created during regular operation of the rail vehicle. The latter can be particularly advantageous if the rail vehicle is already in use.
Dadurch, dass das Dynamikmodell mittels der erfassten Daten erstellt wird, kann es sein, dass ein Einfluss eines Triebfahrzeugführers auf einen Energieverbrauch des Schienenfahrzeugs negiert werden kann, da neben dem Istwert des Energieverbrauchs auch ein nach dem Dynamikmodell berechneter optimaler Energieverbrauch zur Verfügung steht.Because the dynamics model is created using the recorded data, it may be that an influence of a train driver on the energy consumption of the rail vehicle can be negated, since in addition to the actual value of the energy consumption, an optimal energy consumption calculated according to the dynamics model is also available.
Durch das Verfahren kann ein Zusammenhang zwischen Stellwerten von Bedienelementen des Schienenfahrzeugs und Fahrwerten des Schienenfahrzeugs mittels des Dynamikmodells beschrieben werden. Beispielsweise kann so ermittelt werden, welche Stellung eines Fahrhebels zu welchen Geschwindigkeiten und/oder Beschleunigungen oder welche Stellung eines Bremshebels zu welchen Verzögerungen führt. Ein Stellwert kann somit die Stellung des Fahrhebels beziehungsweise die Stellung des Bremshebels sein, ein Fahrwert entsprechend die Geschwindigkeit, Beschleunigung oder Verzögerung. Allgemein ist ein Stellwert der eingestellte Wert eines Bedienelements. Der Fahrwert bezieht sich allgemein auf einen Wert, der die Bewegung des Schienenfahrzeugs beschreibt. Das Dynamikmodell kann dazu genutzt werden, mittels vorgegebener Fahrwerte zugehörige Stellwerte zu berechnen oder mittels vorgegebener Stellwerte zugehörige Fahrwerte zu berechnen.The method can be used to describe a relationship between control values of operating elements of the rail vehicle and driving values of the rail vehicle using the dynamic model. For example, it can be determined which position of a driving lever leads to which speeds and/or accelerations or which position of a brake lever leads to which decelerations. A control value can therefore be the position of the driving lever or the position of the brake lever, and a driving value can be the speed, acceleration or deceleration. In general, a control value is the set value of a control element. The driving value generally refers to a value that describes the movement of the rail vehicle. The dynamics model can be used to determine associated driving values using specified driving values To calculate control values or to calculate associated driving values using specified control values.
In einer Ausführungsform des Verfahrens erfolgt das Fortschreiben des Dynamikmodells iterativ. Dies kann insbesondere dadurch erfolgen, dass mehrere Durchläufe des Verfahrens durchgeführt werden, wobei die vorgegebenen Abweichungen jeweils verkleinert werden, um schlussendlich ein möglichst gut passendes Dynamikmodell zu erhalten.In one embodiment of the method, the dynamic model is updated iteratively. This can be done in particular by carrying out several runs of the method, with the specified deviations being reduced in each case in order to ultimately obtain a dynamic model that fits as well as possible.
In einer Ausführungsform des Verfahrens ist der Speicher im Schienenfahrzeug angeordnet. Dann kann das Verfahren von einer Recheneinheit im Schienenfahrzeug, beispielsweise einer Steuereinheit des Schienenfahrzeugs, bereits während einer Fahrt, insbesondere der Testfahrt, durchgeführt werden. Alternativ kann das Verfahren auch von einer außerhalb eines Schienenfahrzeugs angeordneten Recheneinheit durchgeführt werden. Das Dynamikmodell kann dann auf einen Speicher im Schienenfahrzeug übertragen werden.In one embodiment of the method, the memory is arranged in the rail vehicle. The method can then be carried out by a computing unit in the rail vehicle, for example a control unit of the rail vehicle, during a journey, in particular the test journey. Alternatively, the method can also be carried out by a computing unit arranged outside a rail vehicle. The dynamics model can then be transferred to a memory in the rail vehicle.
In einer Ausführungsform des Verfahrens wird während des Betriebs des Schienenfahrzeugs das Dynamikmodell weiter fortgeschrieben. Dies ermöglicht beispielsweise eine Anpassung des Dynamikmodells automatisch bei Alterung/Verschleiß und/oder bei vorgenommenen Modifikationen. Das Dynamikmodell aktualisiert sich dann selbstständig und ist immer auf dem aktuellen Stand. Dies ermöglicht ein verbessertes Erstellen des Dynamikmodells. Ferner kann vorgesehen sein, dass eine Information das veränderte Dynamikmodell betreffend ausgegeben wird, um so beispielsweise ein Verschleißmanagement des Schienenfahrzeugs zu ermöglichen.In one embodiment of the method, the dynamic model is further updated during operation of the rail vehicle. This allows, for example, the dynamic model to be adjusted automatically in the event of aging/wear and/or modifications. The dynamics model then updates itself independently and is always up to date. This enables improved creation of the dynamics model. Furthermore, it can be provided that information relating to the changed dynamic model is output in order, for example, to enable wear management of the rail vehicle.
In einer Ausführungsform des Verfahrens werden zum Fortschreiben des Dynamikmodells weitere erfasste Daten des Schienenfahrzeugs eingelesen. Die weiteren erfassten Daten umfassen einen weiteren zeitlichen Verlauf zumindest eines Stellwerts und einen weiteren zeitlichen Verlauf zumindest eines Fahrwerts des Schienenfahrzeugs. Der Stellwert und der Fahrwert können dabei identisch zum initial verwendeten Stellwert und Fahrwert sein. Der weitere zeitliche Verlauf des Stellwerts wird in das Dynamikmodell im Speicher eingegeben und ein weiterer modellierte zeitliche Verlauf des Fahrwerts daraus berechnet. Der weitere modellierte zeitliche Verlauf des Fahrwerts und der weitere erfasste zeitliche Verlauf des Fahrwerts werden verglichen. Für den Fall, dass der weitere modellierte zeitliche Verlauf des Fahrwerts und der weitere erfasste zeitliche Verlauf des Fahrwerts um mehr als eine weitere vorgegebene Abweichung voneinander abweichen, wird der Modellparameter angepasst, das Dynamikmodell mit dem angepassten Modellparameter weiter fortgeschrieben, der weitere zeitliche Verlauf des Stellwerts in das weiter fortgeschriebene Dynamikmodell eingegeben, ein weiterer fortgeschriebener modellierte zeitliche Verlauf des Fahrwerts daraus berechnet. Der weiter fortgeschriebene modellierte zeitliche Verlauf des Fahrwerts und der weitere erfasste zeitliche Verlauf des Fahrwerts werden verglichen. Gegebenenfalls wird dann der Modellparameter angepasst und das Verfahren wiederholt oder das weiter fortgeschriebene Dynamikmodell im Speicher abgelegt.In one embodiment of the method, further recorded data from the rail vehicle is read in to update the dynamic model. The further recorded data include a further time course of at least one control value and a further time course of at least one driving value of the rail vehicle. The control value and the Driving values can be identical to the initially used control value and driving value. The further time course of the control value is entered into the dynamic model in the memory and a further modeled time course of the driving value is calculated from this. The further modeled time course of the driving value and the further recorded time course of the driving value are compared. In the event that the further modeled time course of the driving value and the further recorded time course of the driving value deviate from one another by more than a further predetermined deviation, the model parameter is adjusted, the dynamic model is further updated with the adapted model parameter, the further time course of the manipulated value entered into the further updated dynamic model, and a further updated modeled time course of the driving value is calculated from this. The further updated modeled time course of the driving value and the further recorded time course of the driving value are compared. If necessary, the model parameter is then adjusted and the process is repeated or the updated dynamic model is stored in the memory.
In einer Ausführungsform des Verfahrens umfasst das Dynamikmodell mehrere Modellparameter. Es wird ferner überprüft, ob alle Modellparameter Einfluss auf den modellierten zeitlichen Verlauf des Fahrwerts haben. Das Dynamikmodell wird erst im Speicher abgelegt, wenn alle Modellparameter Einfluss auf den modellierten zeitlichen Verlauf des Fahrwerts haben. In diesem Fall kann man davon ausgehen, dass genügend erfasste Daten verwendet wurden, um das Dynamikmodell ausreichend gut zu bestimmen und alle relevanten Fahrsituationen in den erfassten Daten vorhanden waren.In one embodiment of the method, the dynamic model includes several model parameters. It is also checked whether all model parameters have an influence on the modeled time course of the driving value. The dynamics model is only stored in the memory when all model parameters have an influence on the modeled time course of the driving value. In this case, it can be assumed that enough recorded data was used to determine the dynamics model sufficiently well and that all relevant driving situations were present in the recorded data.
In einer Ausführungsform des Verfahrens werden bei der Überprüfung, ob alle Modellparameter Einfluss auf den modellierten zeitlichen Verlauf des Fahrwerts haben die Modellparameter variiert. Es wird angenommen, dass ein Modellparameter Einfluss auf den modellierten zeitlichen Verlauf hat, wenn ein variierter Modellparameter zu einem veränderten modellierten zeitlichen Verlauf führt. Die Modellparameter werden dabei insbesondere einzeln variiert, um die Beeinflussung des Dynamikmodells von den einzelnen Modellparametern und so deren messtechnische Unsicherheit erkennen zu können.In one embodiment of the method, the model parameters are varied when checking whether all model parameters have an influence on the modeled time course of the driving value. It is assumed that a model parameter has an influence on the modeled time course if a varied model parameter leads to a changed modeled time course. In particular, the model parameters are varied individually in order to be able to identify the influence of the individual model parameters on the dynamics model and thus their measurement uncertainty.
In einer Ausführungsform des Verfahrens erfolgt das Berechnen des modellierten zeitlichen Verlaufs des Fahrwerts mittels eines neuronalen Netzes. Neuronale Netze sind insbesondere dann geeignet, einen Zusammenhang zwischen den Stellwerten und den Fahrwerten zu ermitteln, wenn sonst keine weiteren Kenntnisse über das Dynamikmodell vorliegen.In one embodiment of the method, the modeled time course of the driving value is calculated using a neural network. Neural networks are particularly suitable for determining a connection between the control values and the driving values if no other knowledge about the dynamic model is available.
Die Erfindung betrifft ferner ein Verfahren zum Betreiben eines Schienenfahrzeugs, wobei das Schienenfahrzeug eine Steuereinheit mit einem Speicher umfasst. Im Speicher ist ein mit dem erfindungsgemäßen Verfahren zum Erstellen eines Dynamikmodells erstelltes Dynamikmodell des Schienenfahrzeugs abgelegt. Die Steuereinheit wählt einen Fahrwert, berechnet mittels des Dynamikmodells einen Stellwert, mit dem der Fahrwert erreicht wird und stellt anschließend den Stellwert anhand der Berechnung. Dies kann beispielsweise beim automatisierten Steuern des Schienenfahrzeugs eingesetzt werden.The invention further relates to a method for operating a rail vehicle, wherein the rail vehicle comprises a control unit with a memory. A dynamic model of the rail vehicle created using the method according to the invention for creating a dynamic model is stored in the memory. The control unit selects a driving value, uses the dynamics model to calculate a control value with which the driving value is achieved and then sets the control value based on the calculation. This can be used, for example, in automated control of the rail vehicle.
In einer Ausführungsform überprüft die Steuereinheit das Dynamikmodell anhand von Fahrwerten und Stellwerten und passt das Dynamikmodell gegebenenfalls an, wenn Abweichungen vorliegen. Dies kann beispielsweise mittels des beschriebenen Verfahrens zum Erstellen des Dynamikmodells erfolgen.In one embodiment, the control unit checks the dynamics model based on driving values and control values and, if necessary, adapts the dynamics model if there are deviations. This can be done, for example, using the described method for creating the dynamics model.
In einer Ausführungsform wird ein angepasstes Dynamikmodell mittels Funkverbindung an eine zentrale Recheneinheit gesendet. Die Zentrale Recheneinheit ist dann gegebenenfalls eingerichtet, Erkenntnisse aus dem angepassten Dynamikmodell, insbesondere angepasste Modellparameter, an andere Schienenfahrzeuge auszugeben.In one embodiment, an adapted dynamic model is sent to a central processing unit via a radio connection. The central processing unit is then, if necessary, set up to output findings from the adapted dynamic model, in particular adapted model parameters, to other rail vehicles.
In einer Ausführungsform wird der Steuereinheit ein Fahrwertprofil vorgegeben, wobei die Steuereinheit ein Stellwertprofil aus dem Fahrwertprofil anhand des Dynamikmodells berechnet. Anschließend stellt die Steuereinheit das Stellwertprofil bereit. Das Stellwertprofil kann dabei zeitlichen Veränderungen des Stellwerts entsprechen. Das Fahrwertprofil kann zeitlichen Veränderungen des Fahrwerts entsprechen und beispielsweise durch eine Fahrstrecke (beispielsweise aufgrund von Geschwindigkeitsbegrenzungen) oder durch einen Fahrplan vorgegeben sein.In one embodiment, the control unit is given a driving value profile, wherein the control unit calculates a control value profile from the driving value profile using the dynamic model. The control unit then provides the control value profile. The control value profile can correspond to changes in the control value over time. The driving value profile can correspond to changes in the driving value over time and can be predetermined, for example, by a route (for example due to speed limits) or by a timetable.
In einer Ausführungsform stellt die Steuereinheit Abweichungen zwischen aus den Stellwerten berechneten Fahrwerten und realen Fahrwerten fest und gibt eine Information aus. Die Information kann beispielsweise an einen Triebfahrzeugführer mittels Anzeige oder akustisch ausgegeben werden und so auf fehlerhafte bzw. kritische Zustände des Schienenfahrzeuges aufmerksam machen.In one embodiment, the control unit detects deviations between driving values calculated from the control values and real driving values and outputs information. The information can, for example, be output to a train driver by means of a display or acoustically and thus draw attention to faulty or critical conditions of the rail vehicle.
Des Weiteren betrifft die Erfindung auch ein Computerprogrammprodukt mit Programmbefehlen zur Durchführung des genannten erfindungsgemäßen Verfahrens und/oder dessen Ausführungsbeispielen, wobei mittels des Computerprogrammprodukts jeweils das erfindungsgemäße Verfahren und/oder dessen Ausführungsbeispiele durchführbar sind.Furthermore, the invention also relates to a computer program product with program instructions for carrying out the method according to the invention and/or its exemplary embodiments, wherein the method according to the invention and/or its exemplary embodiments can be carried out by means of the computer program product.
Darüber hinaus betrifft die Erfindung auch noch eine Bereitstellungsvorrichtung zum Speichern und/oder Bereitstellen des Computerprogrammprodukts. Die Bereitstellungsvorrichtung ist beispielsweise ein Datenträger, der das Computerprogrammprodukt speichert und/oder bereitstellt. Alternativ und/oder zusätzlich ist die Bereitstellungsvorrichtung beispielsweise ein Netzwerkdienst, ein Computersystem, ein Serversystem, insbesondere ein verteiltes Computersystem, ein cloudbasiertes Rechnersystem und/oder virtuelles Rechnersystem, welches das Computerprogrammprodukt vorzugsweise in Form eines Datenstroms speichert und/oder bereitstellt.In addition, the invention also relates to a provision device for storing and/or providing the computer program product. The provision device is, for example, a data storage medium that stores and/or provides the computer program product. Alternatively and/or additionally, the provision device is, for example, a network service, a computer system, a server system, in particular a distributed computer system, a cloud-based computer system and/or virtual computer system, which stores and/or provides the computer program product, preferably in the form of a data stream.
Die Erfindung umfasst ferner eine Steuereinheit für ein Schienenfahrzeug, die eingerichtet ist, ein Dynamikmodell aus einem Speicher zu laden, einen Fahrwert zu wählen, mittels des Dynamikmodells einen Stellwert zu berechnen, mit dem der Fahrwert erreicht wird und anschließend den Stellwert zu stellen. Ferner kann vorgesehen sein, dass die Steuereinheit darüber hinaus eingerichtet ist, das erfindungsgemäße Verfahren zum Betreiben eines Schienenfahrzeugs auszuführen und/oder das erfindungsgemäße Verfahren zum Erstellen eines Dynamikmodells des Schienenfahrzeugs auszuführen. Insbesondere kann die Steuereinheit eingerichtet sein, das Dynamikmodell zu überprüfen, indem die anhand der gestellten Stellwerte erwarteten Fahrwerte mit realen Fahrwerten verglichen werden und anschließend gegebenenfalls bei Abweichung das Dynamikmodell angepasst wird.The invention further comprises a control unit for a rail vehicle, which is set up to load a dynamic model from a memory, select a driving value, use the dynamic model to calculate a control value with which the driving value is achieved and then set the control value. Furthermore, it can be provided that the control unit is also set up to carry out the method according to the invention for operating a rail vehicle and/or to carry out the method according to the invention for creating a dynamic model of the rail vehicle. In particular, the control unit can be set up to check the dynamic model by comparing the driving values expected based on the set control values with real driving values and then, if necessary, adapting the dynamic model in the event of a deviation.
Die Erfindung umfasst ferner ein Schienenfahrzeug mit einer erfindungsgemäßen Steuereinheit.The invention further includes a rail vehicle with a control unit according to the invention.
Die oben beschriebenen Eigenschaften, Merkmale und Vorteile dieser Erfindung sowie die Art und Weise, wie diese erreicht werden, werden klarer und deutlicher verständlich durch die Erläuterungen der folgenden, stark vereinfachten, schematischen Darstellungen bevorzugter Ausführungsbeispiele. Hierbei zeigen in jeweils schematisierter Darstellung:
-
FIG 1 ein Ablaufdiagramm eines Verfahrens zum Erstellen eines Dynamikmodells eines Schienenfahrzeuges; -
FIG 2 ein Ablaufdiagramm eines Verfahrens zum Betreiben eines Schienenfahrzeugs; und -
FIG 3 ein Schienenfahrzeug mit einer Steuereinheit.
-
FIG 1 a flowchart of a method for creating a dynamics model of a rail vehicle; -
FIG 2 a flowchart of a method for operating a rail vehicle; and -
FIG 3 a rail vehicle with a control unit.
In einem ersten Verfahrensschritt 105 wird das Dynamikmodell mit dem Modellparameter initialisiert. Gleichzeitig, davor oder danach wird ein zweiter Verfahrensschritt 110 ausgeführt, bei dem erfasste Daten des Schienenfahrzeugs eingelesen werden, wobei die erfassten Daten einen zeitlichen Verlauf zumindest eines Stellwerts und einen zeitlichen Verlauf zumindest eines Fahrwerts des Schienenfahrzeugs umfassen. Die erfassten Daten können dabei während Testfahrten oder im regulären Betrieb des Schienenfahrzeugs generiert worden sein.In a
In einem daran anschließenden dritten Verfahrensschritt 115 wird der zeitliche Verlauf des Stellwerts in das Dynamikmodell eingegeben und ein modellierter zeitlicher Verlauf des Fahrwerts daraus berechnet. In einem daran anschließenden vierten Verfahrensschritt 120 werden der modellierte zeitliche Verlauf des Fahrwerts und der erfasste zeitliche Verlauf des Fahrwerts miteinander verglichen. Bei diesem Vergleich kann vorgesehen sein, zu überprüfen, ob der modellierte zeitliche Verlauf des Fahrwerts mit dem erfassten zeitlichen Verlauf des Fahrwerts ausreichend gut übereinstimmt, beispielsweise indem eine Abweichung des modellierten zeitlichen Verlaufs des Fahrwerts vom erfassten zeitlichen Verlauf des Fahrwerts vorliegt. Für den Fall, dass der modellierte zeitliche Verlauf des Fahrwerts und der erfasste zeitliche Verlauf des Fahrwerts maximal um eine vorgegebene Abweichung voneinander abweichen wird ein fünfter Verfahrensschritt 125 ausgeführt, bei dem das Dynamikmodell in einem Speicher abgelegt wird. In diesem Fall kann davon ausgegangen werden, dass das Dynamikmodell ausreichend genau ist und somit das Dynamikmodell für eine spätere Anwendung abgelegt werden kann. Für den Fall, dass der modellierte zeitliche Verlauf des Fahrwerts und der erfasste zeitliche Verlauf des Fahrwerts um mehr als eine vorgegebene Abweichung voneinander abweichen, wird ein sechster Verfahrensschritt 130 ausgeführt. Im sechsten Verfahrensschritt 130 wird der Modellparameter angepasst. Ferner wird das Dynamikmodell mit dem angepassten Modellparameter fortgeschrieben.In a subsequent
Anschließend wird das Verfahren mit dem dritten Verfahrensschritt 115 fortgeführt, wobei erneut der zeitliche Verlauf des Stellwerts in das nun fortgeschriebene Dynamikmodell eingegeben und ein fortgeschriebener modellierte zeitliche Verlauf des Fahrwerts daraus berechnet wird. Anschließend wird der vierte Verfahrensschritt 120 erneut ausgeführt und der fortgeschriebene modellierte zeitliche Verlauf des Fahrwerts und der erfasste zeitliche Verlauf des Fahrwerts miteinander verglichen. Weichen nun der fortgeschriebene modellierte zeitliche Verlauf des Fahrwerts und der erfasste zeitliche Verlauf des Fahrwerts maximal um eine vorgegebene Abweichung voneinander ab, kann nun der fünfte Verfahrensschritt 125 ausgeführt werden. Ansonsten werden der sechste Verfahrensschritt 130, der dritte Verfahrensschritt 115 und der vierte Verfahrensschritt 120 erneut ausgeführt, gegebenenfalls so lange, bis sich der fortgeschriebene modellierte zeitliche Verlauf des Fahrwerts und der erfasste zeitliche Verlauf des Fahrwerts nur noch um die vorgegebene Abweichung voneinander unterscheiden. Sobald sich der fortgeschriebene modellierte zeitliche Verlauf des Fahrwerts und der erfasste zeitliche Verlauf des Fahrwerts nur noch um die vorgegebene Abweichung voneinander unterscheiden, kann der fünfte Verfahrensschritt 125 ausgeführt werden.The method is then continued with the
Dadurch, dass das Dynamikmodell mit diesem Verfahren erstellt wird, ist eine einfache Möglichkeit gegeben, ein Dynamikmodell für ein Schienenfahrzeug zu erstellen. Insbesondere kann dabei vorgesehen sein, dass das Initialisieren mit dem Modellparameter im ersten Verfahrensschritt 105 anhand von grundsätzlichen Erwägungen, wie das Schienenfahrzeug gegebenenfalls funktionieren könnte, erfolgt. Ferner können auch mehrere Modellparameter vorgesehen sein, wobei für den Fall, dass der modellierte zeitliche Verlauf des Fahrwerts und der erfasste zeitliche Verlauf des Fahrwerts um mehr als eine vorgegebene Abweichung voneinander abweichen einer der Modellparameter, mehrere der Modellparameter oder alle Modellparameter verändert werden.The fact that the dynamics model is created using this method provides a simple way to create a dynamics model for a rail vehicle. In particular, it can be provided that the initialization with the model parameter in the
Es kann vorgesehen sein, dass bei der Erstellung der erfassten Daten, die im zweiten Verfahrensschritt 110 eingelesen werden, vorgegebene Fahrsituationen durchlaufen werden, damit die erfassten Daten möglichst relevant zur Erstellung des Dynamikmodells sind. Alternativ oder zusätzlich können die erfassten Daten während eines regulären Betriebs des Schienenfahrzeugs erstellt worden sein. Letzteres kann insbesondere dann vorteilhaft sein, wenn das Schienenfahrzeug bereits eingesetzt wird.It can be provided that when creating the captured data, which is read in in the
Dadurch, dass das Dynamikmodell mittels der erfassten Daten erstellt wird, kann es sein, dass ein Einfluss eines Triebfahrzeugführers auf einen Energieverbrauch des Schienenfahrzeugs negiert werden kann, da neben dem Istwert des Energieverbrauchs auch ein nach dem Dynamikmodell berechneter Energieverbrauch zur Verfügung steht.Because the dynamics model is created using the recorded data, it may be that an influence of a locomotive driver on the energy consumption of the rail vehicle can be negated, since in addition to the actual value of the energy consumption, an energy consumption calculated according to the dynamics model is also available.
Außerdem sind in
In einem Ausführungsbeispiel erfolgt das Fortschreiben des Dynamikmodells iterativ. Dies kann insbesondere dadurch erfolgen, nachdem sich der fortgeschriebene modellierte zeitliche Verlauf des Fahrwerts und der erfasste zeitliche Verlauf des Fahrwerts nur noch um die vorgegebene Abweichung voneinander unterscheiden die für den vierten Verfahrensschritt 120 relevante vorgegebene Abweichung reduziert wird, so dass der sechste Verfahrensschritt 130, der dritte Verfahrensschritt 115 und der vierte Verfahrensschritt 120 weiter ausgeführt werden. Mehrere Durchläufe des Verfahrens beziehungsweise dieser Verfahrensschritte können dann durchgeführt werden, wobei die vorgegebenen Abweichungen immer weiter reduziert werden, wenn die bisherige vorgegebene Abweichung unterschritten wird. Nach Unterschreiten einer Abbruchabweichung ist dann ein möglichst gut passendes Dynamikmodell erreicht, welches im fünften Verfahrensschritt 125 dann im Speicher abgelegt werden kann.In one exemplary embodiment, the dynamic model is updated iteratively. This can be done in particular in that after the updated modeled time course of the driving value and the recorded time course of the driving value only differ from each other by the predetermined deviation, the predetermined deviation relevant to the
In einem Ausführungsbeispiel ist der Speicher im Schienenfahrzeug angeordnet. Dann kann das Verfahren von einer Recheneinheit im Schienenfahrzeug, beispielsweise einer Steuereinheit des Schienenfahrzeugs, bereits während einer Fahrt, insbesondere der Testfahrt, durchgeführt werden. Alternativ kann das Verfahren auch von einer außerhalb eines Schienenfahrzeugs angeordneten Recheneinheit durchgeführt werden. Das Dynamikmodell kann dann auf einen Speicher im Schienenfahrzeug übertragen werden.In one exemplary embodiment, the memory is arranged in the rail vehicle. The method can then be carried out by a computing unit in the rail vehicle, for example a control unit of the rail vehicle, during a journey, in particular the test journey. Alternatively, the method can also be carried out by a computing unit arranged outside a rail vehicle. The dynamics model can then be transferred to a memory in the rail vehicle.
In einem Ausführungsbeispiel wird das Dynamikmodell während des Betriebs des Schienenfahrzeugs weiter fortgeschrieben. Hierzu wird im ersten Verfahrensschritt 105 das zuvor im fünften Verfahrensschritt 125 gespeicherte Dynamikmodell initialisiert und dann in einem siebten Verfahrensschritt 135 weitere erfasste Daten des Schienenfahrzeugs eingelesen. Dies ermöglicht beispielsweise eine Anpassung des Dynamikmodells automatisch bei Alterung/Verschleiß und/oder bei vorgenommenen Modifikationen. Das Dynamikmodell kann dann mittels des dritten Verfahrensschritts 115, des vierten Verfahrensschritts 120 und gegebenenfalls des sechsten Verfahrensschritts 130 weiter aktualisiert werden und ist so immer auf dem aktuellen Stand. Dies ermöglicht ein verbessertes Erstellen des Dynamikmodells. Ferner kann vorgesehen sein, dass eine Information das veränderte Dynamikmodell betreffend in einem achten Verfahrensschritt 140 ausgegeben wird, um so beispielsweise ein Verschleißmanagement des Schienenfahrzeugs zu ermöglichen. Diese Ausgabe kann an den Triebfahrzeugführer oder an eine zentrale Stelle erfolgen.In one exemplary embodiment, the dynamic model is further updated during operation of the rail vehicle. For this purpose, in the
Werden zum Fortschreiben des Dynamikmodells weitere erfasste Daten des Schienenfahrzeugs im siebten Verfahrensschritt 135 eingelesen, können diese insbesondere einen weiteren zeitlichen Verlauf zumindest eines Stellwerts und einen weiteren zeitlichen Verlauf zumindest eines Fahrwerts des Schienenfahrzeugs umfassen. Der Stellwert und der Fahrwert können dabei identisch zum initial verwendeten Stellwert und Fahrwert sein. Der weitere zeitliche Verlauf des Stellwerts wird im dritten Verfahrensschritt 115 in das Dynamikmodell aus dem Speicher eingegeben und ein weiterer modellierte zeitliche Verlauf des Fahrwerts daraus berechnet. Der weitere modellierte zeitliche Verlauf des Fahrwerts und der weitere erfasste zeitliche Verlauf des Fahrwerts werden im vierten Verfahrensschritt 120 verglichen. Nun wird entweder der fünfte Verfahrensschritt 125 durchgeführt, wenn der weitere modellierte zeitliche Verlauf des Fahrwerts und der weitere erfasste zeitliche Verlauf des Fahrwerts maximal um eine weitere vorgegebene Abweichung voneinander abweichen, oder der sechste Verfahrensschritt 130 und nachfolgend der dritte Verfahrensschritt 115 und der vierte Verfahrensschritt 120 durchgeführt, wenn der weitere erfasste zeitliche Verlauf des Fahrwerts um mehr als eine weitere vorgegebene Abweichung voneinander abweichen. Dann wird im sechsten Verfahrensschritt 130 der Modellparameter angepasst und das Dynamikmodell mit dem angepassten Modellparameter weiter fortgeschrieben. Im dritten Verfahrensschritt 115 wird dann der weitere zeitliche Verlauf des Stellwerts in das weiter fortgeschriebene Dynamikmodell eingegeben und ein weiterer fortgeschriebener modellierte zeitliche Verlauf des Fahrwerts daraus berechnet. Im vierten Verfahrensschritt 120 werden der weiter fortgeschriebene modellierte zeitliche Verlauf des Fahrwerts und der weitere erfasste zeitliche Verlauf des Fahrwerts verglichen. Gegebenenfalls wird dann der Modellparameter angepasst und das Verfahren über den sechsten Verfahrensschritt 130 wiederholt oder das weiter fortgeschriebene Dynamikmodell im fünften Verfahrensschritt 125 im Speicher abgelegt.If further recorded data of the rail vehicle is read in in the
In einem Ausführungsbeispiel umfasst das Dynamikmodell mehrere Modellparameter. In einem neunten Verfahrensschritt 145 wird nach dem vierten Verfahrensschritt 120 ferner überprüft, ob alle Modellparameter Einfluss auf den modellierten zeitlichen Verlauf des Fahrwerts haben. Das Dynamikmodell wird erst im Speicher abgelegt, wenn alle Modellparameter Einfluss auf den modellierten zeitlichen Verlauf des Fahrwerts haben. In diesem Fall kann man davon ausgehen, dass genügend erfasste Daten verwendet wurden, um das Dynamikmodell ausreichend gut zu bestimmen und alle relevanten Fahrsituationen in den erfassten Daten vorhanden waren. In diesem Fall wird also der fünfte Verfahrensschritt 125 durchgeführt. Haben noch nicht alle Modellparameter Einfluss auf den modellierten zeitlichen Verlauf des Fahrwerts, wird das Verfahren nach dem neunten Verfahrensschritt 145 mit dem dritten Verfahrensschritt 115 fortgeführt, nachdem entweder ferner der zweite Verfahrensschritt 110 oder der siebte Verfahrensschritt 135 erneut durchgeführt wurden, also weitere erfasste Daten zur Verfügung stehen.In one embodiment, the dynamics model includes several model parameters. In a
Es kann vorgesehen sein, dass im neunten Verfahrensschritt 145 die Modellparameter variiert werden. Es wird angenommen, dass ein Modellparameter Einfluss auf den modellierten zeitlichen Verlauf hat, wenn ein variierter Modellparameter zu einem veränderten modellierten zeitlichen Verlauf führt. Es kann vorgesehen sein, dass die Modellparameter dabei insbesondere einzeln variiert werden, um die Beeinflussung des Dynamikmodells von den einzelnen Modellparametern erkennen zu können.It can be provided that the model parameters are varied in the
In einem Ausführungsbeispiel erfolgt das Berechnen des modellierten zeitlichen Verlaufs des Fahrwerts im dritten Verfahrensschritt 115 mittels eines neuronalen Netzes. Neuronale Netze sind insbesondere dann geeignet, einen Zusammenhang zwischen den Stellwerten und den Fahrwerten zu ermitteln, wenn sonst keine weiteren Kenntnisse über das Dynamikmodell vorliegen.In one exemplary embodiment, the modeled time course of the driving value is calculated in the
Außerdem kann ein optionaler zehnter Verfahrensschritt 150 vorgesehen sein, in dem das im Speicher abgelegte Dynamikmodell an eine zentrale Recheneinheit ausgegeben wird. Der zehnte Verfahrensschritt kann dabei insbesondere nach dem fünften Verfahrensschritt 125 ausgeführt werden. Es kann vorgesehen sein, dass der zehnte Verfahrensschritt 150 immer dann ausgeführt wird, wenn sich das Dynamikmodell ändert und dann das in
Außerdem sind in
In einem Ausführungsbeispiel wird der Steuereinheit im zwölften Verfahrensschritt 160 ein Fahrwertprofil vorgegeben. Im dreizehnten Verfahrensschritt 165 berechnet die Steuereinheit ein Stellwertprofil aus dem Fahrwertprofil anhand des Dynamikmodells. Anschließend stellt die Steuereinheit das Stellwertprofil im vierzehnten Verfahrensschritt 170. Das Stellwertprofil kann dabei zeitlichen Veränderungen des Stellwerts entsprechen. Das Fahrwertprofil kann zeitlichen Veränderungen des Fahrwerts entsprechen und beispielsweise durch eine Fahrstrecke (beispielsweise aufgrund von Geschwindigkeitsbegrenzungen) oder durch einen Fahrplan vorgegeben sein.In one exemplary embodiment, the control unit is given a driving value profile in the
In einem Ausführungsbeispiel überprüft die Steuereinheit in einem fünfzehnten Verfahrensschritt 175 das Dynamikmodell anhand von Fahrwerten und Stellwerten und passt das Dynamikmodell gegebenenfalls an, wenn Abweichungen vorliegen. Dies kann beispielsweise mittels des im Zusammenhang mit
In einem Ausführungsbeispiel wird ein angepasstes Dynamikmodell mittels Funkverbindung in einem sechzehnten Verfahrensschritt 180 an eine zentrale Recheneinheit gesendet. Die Zentrale Recheneinheit ist dann gegebenenfalls eingerichtet, Erkenntnisse aus dem angepassten Dynamikmodell, insbesondere angepasste Modellparameter, an andere Schienenfahrzeuge auszugeben.In one exemplary embodiment, an adapted dynamic model is sent to a central processing unit by means of a radio connection in a
In einem Ausführungsbeispiel stellt die Steuereinheit Abweichungen zwischen aus den Stellwerten berechneten Fahrwerten und realen Fahrwerten fest und gibt in einem siebzehnten Verfahrensschritt 185 eine Information aus. Die Information kann beispielsweise an einen Triebfahrzeugführer mittels Anzeige oder akustisch ausgegeben werden.In one exemplary embodiment, the control unit determines deviations between driving values calculated from the control values and real driving values and outputs information in a
Die Steuereinheit 210 weist ferner ein Funkmodul 215 auf, mit dem das Dynamikmodell an eine zentrale Recheneinheit 220 gesendet werden kann. Diese weist hierzu ebenfalls ein Funkmodul 221 auf. Ferner kann vorgesehen sein, dass die Steuereinheit 210 ein Dynamikmodell von der zentralen Recheneinheit 220 empfängt.The
Obwohl die Erfindung im Detail durch das bevorzugte Ausführungsbeispiel näher illustriert und beschrieben wurde, so ist die Erfindung nicht durch die offenbarten Beispiele eingeschränkt und andere Variationen können vom Fachmann hieraus abgeleitet werden, ohne den Schutzumfang der Erfindung zu verlassen.Although the invention has been illustrated and described in detail by the preferred embodiment, the invention is not limited by the examples disclosed and other variations may be derived therefrom by those skilled in the art without departing from the scope of the invention.
Claims (15)
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP22195763.2A EP4339066A1 (en) | 2022-09-15 | 2022-09-15 | Dynamics model for a rail vehicle |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP22195763.2A EP4339066A1 (en) | 2022-09-15 | 2022-09-15 | Dynamics model for a rail vehicle |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| EP4339066A1 true EP4339066A1 (en) | 2024-03-20 |
Family
ID=83355333
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP22195763.2A Pending EP4339066A1 (en) | 2022-09-15 | 2022-09-15 | Dynamics model for a rail vehicle |
Country Status (1)
| Country | Link |
|---|---|
| EP (1) | EP4339066A1 (en) |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20190369627A1 (en) * | 2018-06-01 | 2019-12-05 | Thales Canada Inc | Self learning vehicle control system |
| US20210107543A1 (en) * | 2019-10-11 | 2021-04-15 | Progress Rail Services Corporation | Artificial intelligence based ramp rate control for a train |
| EP4035969A1 (en) * | 2021-01-29 | 2022-08-03 | Siemens Mobility GmbH | Controller, railway vehicle and method for training a controller for a railway vehicle |
-
2022
- 2022-09-15 EP EP22195763.2A patent/EP4339066A1/en active Pending
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20190369627A1 (en) * | 2018-06-01 | 2019-12-05 | Thales Canada Inc | Self learning vehicle control system |
| US20210107543A1 (en) * | 2019-10-11 | 2021-04-15 | Progress Rail Services Corporation | Artificial intelligence based ramp rate control for a train |
| EP4035969A1 (en) * | 2021-01-29 | 2022-08-03 | Siemens Mobility GmbH | Controller, railway vehicle and method for training a controller for a railway vehicle |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP2631878A1 (en) | Diagnostic method and diagnostic device for a vehicle component of a vehicle | |
| EP3331736B2 (en) | Method for putting a brake system having specified approval prerequisites into service and system for putting a brake system having specified approval prerequisites into service | |
| DE102019126195A1 (en) | Process for the efficient, simulative application of automated driving functions | |
| DE102019134053A1 (en) | Process for the continuous validation of automated driving functions applied in driving tests | |
| DE102006028695A1 (en) | Electronic control system with malfunction monitoring | |
| DE102018209108A1 (en) | Fast fault analysis for machine learning technical devices | |
| DE102013201031A1 (en) | Method for commissioning at least one functional device and rail vehicle association | |
| EP3460727A1 (en) | Method for examining a functional behaviour of a technical system and evaluation unit | |
| EP4339066A1 (en) | Dynamics model for a rail vehicle | |
| WO2005003972A2 (en) | Method for checking the safety and reliability of a software-based electronic system | |
| EP4082868A1 (en) | Method for optimizing rail traffic of a rail traffic network | |
| DE10153447B4 (en) | Method and device for programming a control device of a vehicle, in particular of a motor vehicle | |
| EP4117977A2 (en) | Railway system with diagnostic system and method for operating same | |
| DE102018202626A1 (en) | Method for the computer-aided parameterization of a technical system | |
| EP3603010A1 (en) | Method for transferring data from a device to a data management means, switching unit, device and system | |
| EP1117023B1 (en) | Device for fault diagnosis during motor vehicle operation | |
| DE102021130866A1 (en) | Method for determining a vehicle mass of a vehicle, mass estimation unit and vehicle | |
| WO2022084452A1 (en) | Method for operating an automation system of a machine or an installation | |
| DE102018222150A1 (en) | Method for emergency braking of an at least partially automated motor vehicle | |
| DE102019107240A1 (en) | Diagnostic method, diagnostic system and motor vehicle | |
| DE112018007474T5 (en) | TRANSFER SYSTEM AND TRANSFER PROCEDURE | |
| DE19748181B4 (en) | Method for testing a function or device of a vehicle | |
| DE102017009031A1 (en) | Method for the objective evaluation of a lateral control behavior of an active lane keeping system of a vehicle | |
| EP1040974A2 (en) | Device for influencing a first vehicle parameter | |
| DE102023001315A1 (en) | Method for determining the relevance of bus signals for the power requirements of electrical consumers arranged in an on-board network of a vehicle, computing device and vehicle for carrying out the method |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: THE APPLICATION HAS BEEN PUBLISHED |
|
| AK | Designated contracting states |
Kind code of ref document: A1 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: REQUEST FOR EXAMINATION WAS MADE |
|
| 17P | Request for examination filed |
Effective date: 20240919 |
|
| RBV | Designated contracting states (corrected) |
Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| RAP3 | Party data changed (applicant data changed or rights of an application transferred) |
Owner name: SIEMENS MOBILITY GMBH |