EP4008866B1 - Procédé de commande en fonctionnement d'un dispositif d'entraînement motorisé d'une fenêtre coulissante pour un bâtiment, fenêtre coulissante et installation domotique associées - Google Patents
Procédé de commande en fonctionnement d'un dispositif d'entraînement motorisé d'une fenêtre coulissante pour un bâtiment, fenêtre coulissante et installation domotique associées Download PDFInfo
- Publication number
- EP4008866B1 EP4008866B1 EP22152194.1A EP22152194A EP4008866B1 EP 4008866 B1 EP4008866 B1 EP 4008866B1 EP 22152194 A EP22152194 A EP 22152194A EP 4008866 B1 EP4008866 B1 EP 4008866B1
- Authority
- EP
- European Patent Office
- Prior art keywords
- relative
- frame
- opening
- sash
- fixed frame
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000000034 method Methods 0.000 title claims description 29
- 238000009434 installation Methods 0.000 title claims description 8
- 230000004913 activation Effects 0.000 claims description 11
- 238000012544 monitoring process Methods 0.000 claims description 11
- 238000001514 detection method Methods 0.000 claims description 9
- 238000006073 displacement reaction Methods 0.000 claims description 4
- 230000002441 reversible effect Effects 0.000 claims description 4
- 230000003213 activating effect Effects 0.000 claims 1
- 238000004804 winding Methods 0.000 description 44
- 230000000670 limiting effect Effects 0.000 description 15
- 238000009423 ventilation Methods 0.000 description 6
- 230000036961 partial effect Effects 0.000 description 4
- 238000005253 cladding Methods 0.000 description 3
- 238000004891 communication Methods 0.000 description 3
- 230000009849 deactivation Effects 0.000 description 3
- 239000006185 dispersion Substances 0.000 description 3
- 230000007246 mechanism Effects 0.000 description 3
- 238000003825 pressing Methods 0.000 description 3
- CURLTUGMZLYLDI-UHFFFAOYSA-N Carbon dioxide Chemical compound O=C=O CURLTUGMZLYLDI-UHFFFAOYSA-N 0.000 description 2
- 230000015556 catabolic process Effects 0.000 description 2
- 238000012423 maintenance Methods 0.000 description 2
- 230000009467 reduction Effects 0.000 description 2
- 238000000926 separation method Methods 0.000 description 2
- 229920002994 synthetic fiber Polymers 0.000 description 2
- 238000013519 translation Methods 0.000 description 2
- 230000005355 Hall effect Effects 0.000 description 1
- 239000004677 Nylon Substances 0.000 description 1
- 239000004698 Polyethylene Substances 0.000 description 1
- 229910000831 Steel Inorganic materials 0.000 description 1
- 230000009471 action Effects 0.000 description 1
- 230000000903 blocking effect Effects 0.000 description 1
- 229910002092 carbon dioxide Inorganic materials 0.000 description 1
- 239000001569 carbon dioxide Substances 0.000 description 1
- 238000012512 characterization method Methods 0.000 description 1
- 230000007613 environmental effect Effects 0.000 description 1
- 230000002401 inhibitory effect Effects 0.000 description 1
- 239000004973 liquid crystal related substance Substances 0.000 description 1
- 239000000463 material Substances 0.000 description 1
- 238000005259 measurement Methods 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 229920001778 nylon Polymers 0.000 description 1
- 230000003287 optical effect Effects 0.000 description 1
- -1 polyethylene Polymers 0.000 description 1
- 229920000573 polyethylene Polymers 0.000 description 1
- 238000011084 recovery Methods 0.000 description 1
- 230000008439 repair process Effects 0.000 description 1
- 230000000284 resting effect Effects 0.000 description 1
- 230000000717 retained effect Effects 0.000 description 1
- 238000010079 rubber tapping Methods 0.000 description 1
- 239000007787 solid Substances 0.000 description 1
- 239000010959 steel Substances 0.000 description 1
- 230000001360 synchronised effect Effects 0.000 description 1
- 239000010409 thin film Substances 0.000 description 1
- 239000012855 volatile organic compound Substances 0.000 description 1
- 230000002618 waking effect Effects 0.000 description 1
Images





Classifications
-
- E—FIXED CONSTRUCTIONS
- E05—LOCKS; KEYS; WINDOW OR DOOR FITTINGS; SAFES
- E05F—DEVICES FOR MOVING WINGS INTO OPEN OR CLOSED POSITION; CHECKS FOR WINGS; WING FITTINGS NOT OTHERWISE PROVIDED FOR, CONCERNED WITH THE FUNCTIONING OF THE WING
- E05F15/00—Power-operated mechanisms for wings
- E05F15/60—Power-operated mechanisms for wings using electrical actuators
- E05F15/603—Power-operated mechanisms for wings using electrical actuators using rotary electromotors
- E05F15/632—Power-operated mechanisms for wings using electrical actuators using rotary electromotors for horizontally-sliding wings
- E05F15/643—Power-operated mechanisms for wings using electrical actuators using rotary electromotors for horizontally-sliding wings operated by flexible elongated pulling elements, e.g. belts, chains or cables
-
- E—FIXED CONSTRUCTIONS
- E05—LOCKS; KEYS; WINDOW OR DOOR FITTINGS; SAFES
- E05B—LOCKS; ACCESSORIES THEREFOR; HANDCUFFS
- E05B65/00—Locks or fastenings for special use
- E05B65/08—Locks or fastenings for special use for sliding wings
- E05B65/087—Locks or fastenings for special use for sliding wings the bolts sliding parallel to the wings
- E05B65/0876—Locks or fastenings for special use for sliding wings the bolts sliding parallel to the wings cooperating with the slide guide, e.g. the rail
-
- E—FIXED CONSTRUCTIONS
- E05—LOCKS; KEYS; WINDOW OR DOOR FITTINGS; SAFES
- E05B—LOCKS; ACCESSORIES THEREFOR; HANDCUFFS
- E05B47/00—Operating or controlling locks or other fastening devices by electric or magnetic means
- E05B47/02—Movement of the bolt by electromagnetic means; Adaptation of locks, latches, or parts thereof, for movement of the bolt by electromagnetic means
- E05B47/026—Movement of the bolt by electromagnetic means; Adaptation of locks, latches, or parts thereof, for movement of the bolt by electromagnetic means the bolt moving rectilinearly
-
- E—FIXED CONSTRUCTIONS
- E05—LOCKS; KEYS; WINDOW OR DOOR FITTINGS; SAFES
- E05D—HINGES OR SUSPENSION DEVICES FOR DOORS, WINDOWS OR WINGS
- E05D13/00—Accessories for sliding or lifting wings, e.g. pulleys, safety catches
- E05D13/04—Fasteners specially adapted for holding sliding wings open
-
- E—FIXED CONSTRUCTIONS
- E05—LOCKS; KEYS; WINDOW OR DOOR FITTINGS; SAFES
- E05Y—INDEXING SCHEME ASSOCIATED WITH SUBCLASSES E05D AND E05F, RELATING TO CONSTRUCTION ELEMENTS, ELECTRIC CONTROL, POWER SUPPLY, POWER SIGNAL OR TRANSMISSION, USER INTERFACES, MOUNTING OR COUPLING, DETAILS, ACCESSORIES, AUXILIARY OPERATIONS NOT OTHERWISE PROVIDED FOR, APPLICATION THEREOF
- E05Y2201/00—Constructional elements; Accessories therefor
- E05Y2201/20—Brakes; Disengaging means; Holders; Stops; Valves; Accessories therefor
- E05Y2201/218—Holders
- E05Y2201/22—Locks
-
- E—FIXED CONSTRUCTIONS
- E05—LOCKS; KEYS; WINDOW OR DOOR FITTINGS; SAFES
- E05Y—INDEXING SCHEME ASSOCIATED WITH SUBCLASSES E05D AND E05F, RELATING TO CONSTRUCTION ELEMENTS, ELECTRIC CONTROL, POWER SUPPLY, POWER SIGNAL OR TRANSMISSION, USER INTERFACES, MOUNTING OR COUPLING, DETAILS, ACCESSORIES, AUXILIARY OPERATIONS NOT OTHERWISE PROVIDED FOR, APPLICATION THEREOF
- E05Y2201/00—Constructional elements; Accessories therefor
- E05Y2201/20—Brakes; Disengaging means; Holders; Stops; Valves; Accessories therefor
- E05Y2201/23—Actuation thereof
- E05Y2201/246—Actuation thereof by auxiliary motors, magnets, springs or weights
-
- E—FIXED CONSTRUCTIONS
- E05—LOCKS; KEYS; WINDOW OR DOOR FITTINGS; SAFES
- E05Y—INDEXING SCHEME ASSOCIATED WITH SUBCLASSES E05D AND E05F, RELATING TO CONSTRUCTION ELEMENTS, ELECTRIC CONTROL, POWER SUPPLY, POWER SIGNAL OR TRANSMISSION, USER INTERFACES, MOUNTING OR COUPLING, DETAILS, ACCESSORIES, AUXILIARY OPERATIONS NOT OTHERWISE PROVIDED FOR, APPLICATION THEREOF
- E05Y2201/00—Constructional elements; Accessories therefor
- E05Y2201/40—Motors; Magnets; Springs; Weights; Accessories therefor
- E05Y2201/43—Motors
- E05Y2201/434—Electromotors; Details thereof
-
- E—FIXED CONSTRUCTIONS
- E05—LOCKS; KEYS; WINDOW OR DOOR FITTINGS; SAFES
- E05Y—INDEXING SCHEME ASSOCIATED WITH SUBCLASSES E05D AND E05F, RELATING TO CONSTRUCTION ELEMENTS, ELECTRIC CONTROL, POWER SUPPLY, POWER SIGNAL OR TRANSMISSION, USER INTERFACES, MOUNTING OR COUPLING, DETAILS, ACCESSORIES, AUXILIARY OPERATIONS NOT OTHERWISE PROVIDED FOR, APPLICATION THEREOF
- E05Y2800/00—Details, accessories and auxiliary operations not otherwise provided for
- E05Y2800/40—Physical or chemical protection
- E05Y2800/424—Physical or chemical protection against unintended use, e.g. protection against vandalism or sabotage
- E05Y2800/426—Physical or chemical protection against unintended use, e.g. protection against vandalism or sabotage against unauthorised use, e.g. keys
-
- E—FIXED CONSTRUCTIONS
- E05—LOCKS; KEYS; WINDOW OR DOOR FITTINGS; SAFES
- E05Y—INDEXING SCHEME ASSOCIATED WITH SUBCLASSES E05D AND E05F, RELATING TO CONSTRUCTION ELEMENTS, ELECTRIC CONTROL, POWER SUPPLY, POWER SIGNAL OR TRANSMISSION, USER INTERFACES, MOUNTING OR COUPLING, DETAILS, ACCESSORIES, AUXILIARY OPERATIONS NOT OTHERWISE PROVIDED FOR, APPLICATION THEREOF
- E05Y2800/00—Details, accessories and auxiliary operations not otherwise provided for
- E05Y2800/74—Specific positions
- E05Y2800/75—Specific positions intermediate
-
- E—FIXED CONSTRUCTIONS
- E05—LOCKS; KEYS; WINDOW OR DOOR FITTINGS; SAFES
- E05Y—INDEXING SCHEME ASSOCIATED WITH SUBCLASSES E05D AND E05F, RELATING TO CONSTRUCTION ELEMENTS, ELECTRIC CONTROL, POWER SUPPLY, POWER SIGNAL OR TRANSMISSION, USER INTERFACES, MOUNTING OR COUPLING, DETAILS, ACCESSORIES, AUXILIARY OPERATIONS NOT OTHERWISE PROVIDED FOR, APPLICATION THEREOF
- E05Y2900/00—Application of doors, windows, wings or fittings thereof
- E05Y2900/10—Application of doors, windows, wings or fittings thereof for buildings or parts thereof
- E05Y2900/13—Type of wing
- E05Y2900/148—Windows
Definitions
- the present invention relates to a method for controlling the operation of a motorized drive device for a sliding window for a building, a sliding window for a building associated with such a control method, as well as a home automation installation comprising such a sliding window.
- the present invention relates to the field of windows comprising a motorized drive device setting in motion an opening relative to a fixed frame following a sliding movement, between at least a first position and at least a second position.
- a motorized drive device of such a window comprises an electromechanical actuator.
- the locking device comprises a first subassembly and a second subassembly.
- the first subassembly is fixed to the fixed frame.
- the second subassembly is fixed to the opening leaf.
- the second subassembly comprises a finger movable about an axis of rotation and an elastic return element.
- the elastic return element is configured to bring the movable finger to a rest position.
- the movable finger is configured to cooperate with the first subassembly, during a movement of the opening leaf relative to the fixed frame, so as to be able to lock the opening leaf relative to the fixed frame.
- the first subassembly comprises a rack.
- the movable finger of the second subassembly is configured to cooperate with notches of the rack of the first subassembly.
- the locking device is configured to be able to lock the sash relative to the frame in an open position, a closed position, and a locked ajar position.
- the locked ajar position is disposed between the open position and the closed position of the sash relative to the frame.
- the unlocking of the opening relative to the fixed frame can only be carried out manually by pulling on a chain connected to the movable finger.
- the present invention aims to solve the aforementioned drawbacks.
- the present invention relates to a method for controlling the operation of a motorized drive device for a sliding window for a building, as defined in claim 1.
- the present invention also relates to a sliding window for a building, as defined in claim 8, as well as a home automation installation, as defined in claim 10.
- the first locking device makes it possible to lock the opening relative to the fixed frame in the locked half-open position by means of the motorized drive device.
- the first locking device makes it possible to ensure the ventilation of the building in a secure manner by a half-opening of the opening relative to the fixed frame, in particular by means of simple parts.
- the unlocking of the opening relative to the fixed frame in connection with the first locking device is implemented by means of the motorized drive device configured to generate a movement of the opening relative to the fixed frame passing through the closed and locked position of the opening relative to the fixed frame, by means of the second locking device.
- the electronic control unit of the motorized drive device makes it possible to control the movement of the opening leaf relative to the fixed frame in order to lock the opening leaf relative to the fixed frame in the locked half-open position and to unlock the opening leaf relative to the fixed frame from the locked half-open position.
- the first locking device thus makes it possible to prohibit, or at least delay, an attempted intrusion by an individual.
- Sliding window 2 can also be called sliding bay window.
- the present invention applies to sliding windows and sliding French windows, whether or not equipped with transparent glazing.
- Window 2 comprises at least one opening 3a, 3b and a fixed frame 4.
- window 2 comprises a first opening 3a and a second opening 3b.
- the window 2 also comprises a motorized drive device 5 configured to slide an opening 3a relative to the fixed frame 4.
- the motorized drive device 5 is configured to slide only one of the first and second openings 3a, 3b relative to the fixed frame 4, in particular the first opening 3a.
- the second opening 3b is movable manually, in particular by the action of a user exerting a force on a handle, not shown, of the second opening 3b.
- the second opening 3b is fixed.
- the number of window openings is not limited and may be different, in particular equal to three.
- Each opening 3a, 3b comprises a frame 15.
- Each opening 3a, 3b may also comprise at least one window 16 arranged in the frame 15.
- the number of windows in the opening is not limited and may be different, in particular equal to two or more.
- the frame 15 of each opening 3a, 3b comprises an upper crosspiece 15a, a lower crosspiece, not shown, and first and second lateral uprights 15c, in the assembled configuration of the window 2 relative to the building, as illustrated in Figures 1 to 3 .
- the first side post 15c of the frame 15 of the first opening 3a is the side post 15c located on the right of the first opening 3a. Furthermore, the second side post 15c of the frame 15 of the first opening 3a is the side post 15c located on the left of the first opening 3a.
- the first side upright 15c of the frame 15 of the first opening 3a is opposite the second side upright 15c of the frame 15 of the first opening 3a.
- first side post 15c of the frame 15 of the second opening 3b is the side post 15c located on the right of the second opening 3b.
- second side post 15c of the frame 15 of the second opening 3b is the side post 15c located on the left of the second opening 3b.
- the first side upright 15c of the frame 15 of the second opening 3b is opposite the second side upright 15c of the frame 15 of the second opening 3b.
- the sleeping frame 4 comprises an upper crosspiece 4a, a lower crosspiece, not shown, and first and second side uprights 4c, in the configuration assembly of window 2 relative to the building, as shown in Figures 1 to 3 .
- the first side upright 4c of the sleeping frame 4 is the side upright 4c located on the right of the sleeping frame 4. Furthermore, the second side upright 4c of the sleeping frame 4 is the side upright 4c located on the left of the sleeping frame 4.
- the first side upright 4c of the sleeping frame 4 is opposite the second side upright 4c of the sleeping frame 4.
- the upper crosspiece 4a, the lower crosspiece and the two side uprights 4c of the dormant frame 4 respectively have an inner face and at least one outer face.
- the inner faces of the upper crosspiece 4a, of the lower crosspiece and of the two side uprights 4c of the fixed frame 4 are oriented towards the inside of the window 2 and, in particular, towards an outer edge of the frame 15 of each opening 3a, 3b.
- the outer faces of the upper crosspiece 4a, the lower crosspiece and the two side uprights 4c of the fixed frame 4 are oriented towards the outside of the window 2.
- the window 2 also includes a fitting system, not shown, arranged between the fixed frame 4 and each opening leaf 3a, 3b.
- the fitting system of the window 2 is not shown in the Figures 1 to 3 , so as to make them easier to read.
- the fitting system of the sliding window 2 allows each opening 3a, 3b to slide relative to the fixed frame 4 in a sliding direction D, in the horizontal example, in the assembled configuration of the window 2 relative to the building, as illustrated in Figures 1 to 3 .
- the hardware system comprises a cremone bolt and elements for locking the first opening 3a relative to the fixed frame 4.
- the fitting system is mounted along the first side upright 15c of the frame 15 of the first opening 3a.
- the cremone bolt is arranged inside the first side upright 15c of the frame 15 of the first opening 3a.
- the cremone bolt can also be arranged partly inside the upper crosspiece 15a or the lower crosspiece of the frame 15 of the first opening 3a.
- the cremone bolt comprises at least one rod.
- the cremone bolt also comprises a body.
- the body of the cremone bolt is fixed relative to the first lateral upright 15c of the frame 15 of the first opening 3a.
- the rod is configured to move relative to the body of the cremone bolt.
- the rod is made of several parts connected together, in particular by means of holding elements.
- the movement of the rod of the cremone bolt is implemented along the first lateral upright 15c of the frame 15 of the first opening 3a, in particular in a vertical direction, in the assembled configuration of the window 2 relative to the building.
- the rod of the cremone bolt comprises at least one hook forming a locking element.
- the fixed frame 4, in particular the first lateral upright 4c of the fixed frame 4, comprises at least one striker, not shown.
- Each hook of the rod is configured to cooperate with the aforementioned striker of the fixed frame 4.
- the hooks of the rod, as well as the latches provided in the frame 4, form at least in part the locking elements of the fitting system.
- the first opening 3a is in a so-called locked closed position, which is both closed and locked relative to the frame 4.
- the first opening 3a is in an unlocked position relative to the fixed frame 4, which can also be closed or open.
- the upper crosspiece 4a of the fixed frame 4 comprises a sliding rail 11a to allow sliding of the first opening 3a and a sliding rail, not shown, to allow sliding of the second opening 3b.
- the lower crosspiece of the fixed frame 4 also comprises two sliding rails, respectively for the first opening 3a and the second opening 3b.
- each of the upper 4a and lower crosspieces of the fixed frame 4 comprises a first sliding rail 11a or equivalent for the first opening 3a and a second sliding rail or equivalent for the second opening 3b.
- first and second openings 3a, 3b are configured to move respectively along the first and second sliding rails 11a and the like.
- first and second sliding rails 11a or equivalent are arranged parallel to each other. Furthermore, the first and second sliding rails 11a or equivalent are offset relative to each other according to the thickness of the dormant frame 4.
- the window 2 comprises sliding elements, not shown, allowing the movement of each opening 3a, 3b relative to the fixed frame 4.
- the sliding elements are arranged inside the first and second sliding rails of the lower crosspiece.
- the sliding elements comprise rollers arranged under the first and second openings 3a, 3b.
- the rollers are configured to roll inside the first and second sliding rails of the lower crosspiece.
- a partial or maximum sliding opening position of each opening 3a, 3b relative to the fixed frame 4 corresponds to a ventilation position of the building.
- the motorized drive device 5 makes it possible to automatically move the first opening leaf 3a by sliding relative to the fixed frame 4, in particular between the maximum opening position by sliding the first opening leaf 3a relative to the fixed frame 4 and the closed position of the first opening leaf 3a relative to the fixed frame 4.
- the motorized drive device 5 comprises an electromechanical actuator 6.
- the electromechanical actuator 6 comprises an electric motor 7.
- the electromechanical actuator 6 also comprises an output shaft 8, which is rotatable about an axis of rotation X.
- the axis of rotation X is parallel to the sliding direction D of the first opening 3a relative to the fixed frame 4 and, in the present case, of the second opening 3b relative to the fixed frame 4.
- the electric motor 7 of the electromechanical actuator 6 is of the variable speed type.
- the electric motor 7 is configured to drive the output shaft 8 in rotation according to at least a first rotation speed setpoint and a second rotation speed setpoint, such that the movement of the first opening 3a relative to the fixed frame 4 is implemented either at a first speed or at a second speed, different from the first speed.
- the electric motor 7 is of the brushless type with electronic commutation, also called “BLDC” (acronym for the Anglo-Saxon term BrushLess Direct Current) or “synchronous with permanent magnets”.
- BLDC brushless type with electronic commutation
- the electromechanical actuator 6 is of the reversible type.
- the electromechanical actuator 6 is controlled by an electronic control unit 10 belonging to the motorized drive device 5.
- an electronic control unit 10 makes it possible to determine the position of the first opening 3a by relative to the frame 4, as well as to trigger movements of the first opening 3a relative to the frame 4 by means of the electromechanical actuator 6, autonomously.
- the electronic control unit 10 associated with the electromechanical actuator 6 is configured to detect a movement of the first opening leaf 3a relative to the fixed frame 4 implemented manually and, more particularly, by an element external to the electromechanical actuator 6 acting on the first opening leaf 3a.
- the electromechanical actuator 6 is devoid of a brake, in particular to allow the electromechanical actuator 6 to be reversible.
- the electromechanical actuator 6 is arranged on a part fixed relative to the window 2, in particular relative to the fixed frame 4.
- the electromechanical actuator 6 may also comprise a reduction device, in particular with gears, not shown.
- the electromechanical actuator 6 may also comprise an end-of-travel and/or obstacle detection device, not shown. This detection device may be mechanical or electronic.
- the electric motor 7 and, optionally, the reduction device are arranged inside a casing 17 of the electromechanical actuator 6.
- the electromechanical actuator 6 is of the tubular type.
- the motorized drive device 5 also comprises a flexible element 9.
- the flexible element 9 is driven in movement by the electromechanical actuator 6.
- the flexible element 9 is configured to drive the first opening leaf 3a in movement relative to the fixed frame 4, when the electromechanical actuator 6 is electrically activated.
- the flexible element 9 comprises a first strand 9a and a second strand 9b.
- the flexible element 9 may be of circular section.
- the section of the flexible element is not limiting and may be different, in particular square, rectangular or even oval.
- the flexible element 9 is a cable or a cord.
- the material of the flexible element is not limiting and may be different. In particular, it may be steel.
- the motorized drive device 5 also comprises a drive arm 18.
- the drive arm 18 is, on the one hand, fixed to the first opening 3a and, on the other hand, connected to the flexible element 9.
- the drive arm 18 is configured to secure the flexible element 9 to the first opening 3a.
- the drive arm 18 is connected to the flexible element 9 by means of a shuttle 45.
- the shuttle 45 is fixed to the flexible element 9, in particular to the second strand 9b of the flexible element 9, by means of fixing elements, not shown.
- the fixing elements of the flexible element 9, in particular of the second strand 9b of the flexible element 9, on the shuttle 45 can be of the cable clamp type.
- these fixing elements are screws, for example two in number, configured to be screwed respectively into a screw hole of the shuttle 45, so as to fix the flexible element 9, in particular the second strand 9b of the flexible element 9, by wedging between the head of the screws and a surface of the shuttle 45.
- the drive arm 18 is fixed directly to the first opening 3a.
- the drive arm 18 is connected, on the one hand, to the frame 15 of the first opening 3a and, more particularly, to the first lateral upright 15c of the frame 15 of the first opening 3a and, on the other hand, to the flexible element 9.
- the drive arm 18 is fixed, therefore immobile, relative to the frame 15 of the first opening 3a.
- connection between the drive arm 18 and the frame 15 of the first opening 3a is simplified and makes it possible to minimize the costs of obtaining the window 2.
- the drive arm 18 is arranged in the upper part of the first lateral upright 15c of the frame 15 of the first opening 3a.
- the drive arm 18 is configured to hook onto the flexible element 9 arranged above the sleeping frame 4 and, more particularly, arranged inside a crosspiece 47.
- the drive arm 18 is fixed on an external face of the first lateral upright 15c of the frame 15 of the first opening 3a.
- the drive arm 18 is fixed on a face of the first side upright 15c of the frame 15 of the first opening 3a oriented towards the outside of the window 2, in other words visible to the user.
- the drive arm 18 is assembled with the first opening 3a on the inner side of the frame 15 of the first opening 3a, in the assembled configuration of the window 2 relative to the building.
- the inner side of the frame 15 of the first opening 3a is oriented towards the interior of the building, in the assembled configuration of the window 2 relative to the building.
- the flexible element 9 is connected to the drive arm 18, regardless of the state of the locking elements of the fitting system, i.e. both in the locked state and in the unlocked state of the first opening 3a relative to the fixed frame 4.
- the flexible element 9 is connected to the drive arm 18 permanently, in the assembled configuration of the motorized drive device 5 on the window 2.
- connection between the flexible element 9 and the drive arm 18 is simplified and makes it possible to minimize the costs of obtaining the window 2.
- the drive arm 18 is fixed to the first lateral upright 15c of the frame 15 of the first opening leaf 3a, configured to cooperate with the first lateral upright 4c of the fixed frame 4, when reaching the closed position of the first opening leaf 3a relative to the fixed frame 4.
- the drive arm 18 is fixed to the first lateral upright 15c of the frame 15 of the first opening 3a by means of fixing elements, not shown, in particular removable by means of a tool.
- the fixing elements of the drive arm 18 on the first opening 3a are screw fixing elements.
- the type of fastening elements of the drive arm on the first opening is not limiting and may be different. In particular, they may be elastic snap-fastening fastening elements.
- the drive arm 18 is fixed to the frame 15 of the first opening leaf 3a, following the installation of the first opening leaf 3a inside the fixed frame 4 and, in the present case, also of the second opening leaf 3b inside the fixed frame 4, installation during which the adjustments of the fitting system and the sliding elements are implemented.
- the adjustments of the fitting system and the sliding elements can be implemented manually and conventionally, as for a window without the motorized drive device 5.
- the drive arm 18 is fixed to the frame 15 of the first opening 3a, following the electrical connection of the electromechanical actuator 6, either to a mains power supply network or to a battery.
- the window 2 comprises a covering element.
- the covering element is configured to cover at least the drive arm 18.
- the trim element is configured to cover only the drive arm 18.
- the cladding element is configured to cover the drive arm 18 as well as part or all of the first lateral upright 15c of the frame 15 of the first opening 3a, in particular depending on the height of the frame 15, in the assembled configuration of the window 2 relative to the building.
- the cladding element is fixed relative to the first opening 3a by means of fixing elements, following the assembly of the drive arm 18 on the frame 15 of the first opening 3a.
- the fixing elements of the covering element are configured to cooperate with the drive arm 18 and/or with the first lateral upright 15c of the frame 15 of the first opening 3a.
- the fixing elements of the cladding element relative to the first opening 3a may be, in particular, fixing elements by elastic snap-fastening or by screwing.
- the crosspiece 47 comprises a slide 36. Furthermore, the shuttle 45 is configured to slide inside the slide 36 of the crosspiece 47.
- the motorized drive device 5 comprises a winding pulley 19 of the flexible element 9.
- the winding pulley 19 is driven in rotation by the output shaft 8 of the electromechanical actuator 6.
- a first end of the first strand 9a of the flexible element 9 is connected to a first part of the winding pulley 19.
- a first end of the second strand 9b of the flexible element 9 is connected to a second part of the winding pulley 19.
- first end of each of the first and second strands 9a, 9b of the flexible element 9 is attached respectively to the first part or to the second part of the winding pulley 19 by means of fixing elements 46.
- each of the first and second strands 9a, 9b of the flexible element 9 is respectively fixed directly to the first part or to the second part of the winding pulley 19.
- the fixing elements 46 of the end of each of the first and second strands 9a, 9b of the flexible element 9 are cable clamp type elements.
- these fixing elements 46 are screws, in particular of the self-tapping type, screwing into the winding pulley 19, so as to fix the first and second strands 9a, 9b of the flexible element 9 by wedging between the head of the screws and the winding surface of the flexible element 9 of the winding pulley 19.
- the direction of winding, respectively of unwinding, of the first strand 9a of the flexible element 9 around the first part of the winding pulley 19 is opposite to the direction of winding, respectively of unwinding, of the second strand 9b of the flexible element 9 around the second part of the winding pulley 19.
- the first strand 9a of the flexible element 9 unwinds around the first part of the winding pulley 19, while the second strand 9b of the flexible element 9 winds around the second part of the winding pulley 19.
- the second sliding direction of the first opening 3a relative to the fixed frame 4 is opposite to the first sliding direction.
- the direction of sliding of the first opening 3a relative to the fixed frame 4 is determined as a function of the direction of rotation of the output shaft 8 of the electromechanical actuator 6. Furthermore, the direction of rotation of the winding pulley 19 is determined by the direction of rotation of the output shaft 8 of the electromechanical actuator 6.
- the direction of rotation of the first strand 9a and the second strand 9b of the flexible element 9 around the first and second parts of the winding pulley 19 is a function of the direction of rotation of the output shaft 8 of the electromagnetic actuator 6.
- the direction of rotation of the winding pulley 19 is identical to the direction of rotation of the output shaft 8 of the electromechanical actuator 6.
- Control means of the electromechanical actuator 6 make it possible to control the sliding movement of the first opening 3a relative to the fixed frame 4.
- These control means comprise at least the electronic control unit 10.
- the electronic control unit 10 is configured to operate the electric motor 7 of the electromechanical actuator 6 and, in particular, to enable the supply of electrical energy to the electric motor 7.
- the electronic control unit 10 controls, in particular, the electric motor 7, so as to open or close by sliding the first opening 3a relative to the fixed frame 4.
- the window 2 comprises the electronic control unit 10. More particularly, the electronic control unit 10 is integrated into the motorized drive device 5.
- the motorized drive device 5 is a subassembly pre-assembled before mounting, in the example on the crosspiece 47, which comprises at least the electromechanical actuator 6, the winding pulley 19, the flexible element 9 and the electronic control unit 10.
- the motorized drive device 5 is controlled by a control unit.
- the control unit may be, for example, a local control unit 12.
- the local control unit 12 can be connected by wired or wireless connection to a central control unit 13.
- the central control unit 13 controls the local control unit 12, as well as other similar local control units distributed throughout the building.
- the electronic control unit 10 also comprises a module for receiving orders, in particular radioelectric orders emitted by an order transmitter, such as the local control unit 12 or the central control unit 13, these orders being intended to control the motorized drive device 5.
- the order receiving module can also allow the reception of orders transmitted by wired means.
- the electronic control unit 10, the local control unit 12 and/or the central control unit 13 may be in communication with one or more sensors configured to determine, for example, a temperature, a humidity, a wind speed, a measurement of an indoor or outdoor air quality parameter or even a presence.
- the central control unit 13 can also be in communication with a server 14, so as to control the electromechanical actuator 6 according to data made available remotely via a communication network, in particular an internet network which can be connected to the server 14.
- a communication network in particular an internet network which can be connected to the server 14.
- the electronic control unit 10 can be controlled from the local control unit 12.
- the local control unit 12 is provided with a control keyboard.
- the control keyboard of the local control unit 12 comprises selection elements and, optionally, display elements.
- the selection elements may be push buttons or sensitive keys
- the display elements may be light-emitting diodes, an LCD (acronym for the English expression “Liquid Crystal Display”) or TFT (acronym for the English expression “Thin Film Transistor”) display.
- the selection and display elements may also be produced by means of a touch screen.
- the local control unit 12 may be a fixed or nomadic control point.
- a fixed control point corresponds to a control box intended to be fixed on a facade of a wall of the building, on a face of the frame 15 of the first opening 3a of the window 2 or on one side of the fixed frame 4 of window 2.
- a portable control point corresponds to a remote control.
- the local control unit 12 allows the electronic control unit 10 to be directly controlled according to a selection made by the user.
- the local control unit 12 allows the user to intervene directly on the electromechanical actuator 6 of the motorized drive device 5 via the electronic control unit 10 associated with this motorized drive device 5, or to intervene indirectly on the electromechanical actuator 6 of the motorized drive device 5 via the central control unit 13.
- the motorized drive device 5, in particular the electronic control unit 10, is preferably configured to execute control commands for closing by sliding as well as opening by sliding of the first opening leaf 3a relative to the fixed frame 4, these control commands being able to be issued, in particular, by the local control unit 12 or by the central control unit 13.
- the electronic control unit 10 is thus able to operate the electromechanical actuator 6 of the motorized drive device 5 and, in particular, to enable the supply of electrical energy to the electromechanical actuator 6.
- the electronic control unit 10 is arranged inside the casing 17 of the electromechanical actuator 6.
- the control means of the electromechanical actuator 6 comprise hardware and/or software means.
- the hardware means may include at least one microcontroller.
- the local control unit 12 comprises a sensor measuring at least one parameter of the environment inside the building and integrated into this unit.
- the local control unit 12 can communicate with the central control unit 13, and the central control unit 13 can control the electronic control unit 10 associated with the motorized drive device 5 based on data from the sensor measuring the parameter of the environment inside the building.
- the local control unit 12 can directly control the electronic control unit 10 associated with the motorized drive device 5 based on data coming from the sensor measuring the parameter of the environment inside the building.
- an environmental parameter to inside the building measured by the sensor integrated into the local control unit 12 is the humidity, temperature, carbon dioxide level or the level of a volatile organic compound in the air.
- the activation of the local control unit 12 by the user takes priority over the activation of the central control unit 13, so as to control the closing and opening by sliding of the first opening leaf 3a relative to the fixed frame 4.
- the activation of the local control unit 12 directly controls the electronic control unit 10 associated with the motorized drive device 5 according to a selection made by the user, possibly inhibiting a control order that can be issued by the central control unit 13 or ignoring a value measured by a sensor measuring at least one parameter of the environment inside the building or outside the building, or a presence detection signal inside the building.
- the motorized drive device 5 can be controlled by the user, for example by receiving a control command corresponding to pressing a selection element of the local control unit 12, such as a remote control or a fixed control point.
- the motorized drive device 5 can also be controlled automatically, for example by receiving a control command corresponding to at least one signal from at least one sensor and/or a signal from a clock.
- the sensor and/or the clock can be integrated into the local control unit 12 or the central control unit 13.
- the motorized drive device 5 makes it possible to automatically move the first opening leaf 3a by sliding relative to the fixed frame 4 to a predetermined position, between the closed position and the maximum opening position.
- the sliding movement of the first opening leaf 3a relative to the fixed frame 4 to the predetermined position, in particular partial opening, is implemented following the reception of a control order issued by the local control unit 12, the central control unit 13 or a sensor.
- a sliding movement of the first opening 3 relative to the fixed frame 4 in the sliding direction D is implemented by supplying electrical energy to the electromechanical actuator 6, so as to unwind or wind the first and second strands 9a, 9b of the flexible element 9 around the first and second parts of the winding pulley 19.
- the unwinding or winding of the first and second strands 9a, 9b of the flexible element 9 around the first and second parts of the winding pulley 19 is controlled by the electrical energy supply of the electromechanical actuator 6.
- the electrical energy supply to the electromechanical actuator 6 is controlled by a control order received by the electronic control unit 10 coming from the local control unit 12, from the central control unit 13 or from a sensor.
- the motorized drive device 5, in particular the electromechanical actuator 6, is supplied with electrical energy from a power supply network.
- the electromechanical actuator 6 comprises an electrical power supply cable, not shown, allowing it to be supplied with electrical energy from the mains power supply network.
- the motorized drive device 5, in particular the electromechanical actuator 6, is supplied with electrical energy by means of a battery, not shown.
- the battery can be recharged, for example, by a photovoltaic panel or any other energy recovery system, in particular, of the thermal type.
- the winding pulley 19 and the output shaft 8 of the electromechanical actuator 6 have the same axis of rotation, namely the axis of rotation X.
- the axis of rotation of the winding pulley 19 coincides with the axis of rotation of the output shaft 8 of the electromechanical actuator 6.
- the winding pulley 19 is arranged in the extension of the output shaft 8 of the electromechanical actuator 6 and is driven in rotation about the same axis of rotation X as the output shaft 8 of the electromechanical actuator 6.
- the flexible element 9 forms a loop, called open, between the first end of the first strand 9a, connected to the first part of the winding pulley 19, and the first end of the second strand 9b, connected to the second part of the winding pulley 19.
- first and second strands 9a, 9b of the flexible element 9 are connected to the winding pulley 19 and separated at the first and second parts thereof.
- the electromechanical actuator 6 is fixed to the crosspiece 47 by means of fixing elements 28.
- winding pulley 19 is held on the crosspiece 47 by means of these same fixing elements 28.
- the fixing elements 28 of the electromechanical actuator 6 on the crosspiece 47 comprise supports, in particular fixing brackets.
- these supports are fixed to the crosspiece 47 of the fixed frame 4 by screwing.
- each support of the fixing elements 28 comprises at least one hole 48 for passing a fixing screw.
- each support comprises two holes 48 for passing a fixing screw.
- each fixing screw passing through one of the through holes 48 is screwed into a strip, not shown, held in a groove 49 of the crosspiece 47, in particular in a screw opening provided in the strip.
- the fixing elements 28 of the electromechanical actuator 6 on the crosspiece 47 comprise two supports. A first of these supports is assembled to a first end 6a of the electromechanical actuator 6. A second of these supports is assembled to a second end 6b of the electromechanical actuator 6. The first end 6a of the electromechanical actuator 6 is opposite the second end 6b of the electromechanical actuator 6.
- each support of the fixing elements 28 comprises at least one pin, not shown, configured to cooperate with the groove 49 formed in the crosspiece 47.
- each support comprises two pins.
- each support is oriented and positioned relative to the crosspiece 47.
- the fixing of the electromechanical actuator 6, as well as of the winding pulley 19, on the supports of the fixing elements 28 is implemented by fixing parts, not shown, in particular by screwing.
- the fixing parts of the electromechanical actuator 6, as well as the winding pulley 19, on the supports are elastic snap-fastening elements.
- the flexible element 9 of the motorized drive device 5 extends along the upper crosspiece 4a of the sleeping frame 4 and, more particularly, the crosspiece 47, from the first part of the winding pulley 19 to the second part of the winding pulley 19.
- the crosspiece 47 is fixed to the upper crosspiece 4a of the sleeping frame 4 by means of fixing elements, not shown.
- the elements for fixing the crosspiece 47 to the upper crosspiece 4a of the fixed frame 4 are screw fixing elements.
- the type of fixing elements of the crosspiece on the upper crosspiece of the dormant frame are not limiting and may be different. They may be, in particular, elastic snap-fastening fixing elements.
- the electromechanical actuator 6 is fixed to the upper crosspiece 4a of the fixed frame 4 by means of the fixing elements 28.
- the flexible element 9 extends only at the level of the upper crosspiece 4a of the sleeping frame 4, following at least part of the length V of the crosspiece 47.
- the motorized drive device 5 comprises at least two angle return pulleys 35 spaced apart by a determined spacing along the length V of the crosspiece 47.
- the angle return pulleys 35 are configured to guide the flexible element 9, in particular relative to the winding pulley 19 and the drive arm 18, in particular during a movement of the first opening 3a relative to the fixed frame 4.
- At least one first angle return pulley 35 is arranged on a first side of the electromechanical actuator 6, i.e. on the side of the first end 6a of the electromechanical actuator 6. At least one second angle return pulley 35 is arranged on a second side of the electromechanical actuator 6, i.e. on the side of the second end 6b of the electromechanical actuator 6.
- the motorized drive device 5 comprises a pair of angle return pulleys 35 arranged on the first side of the electromechanical actuator 6 at a distance of the determined spacing from a pair of angle return pulleys 35 arranged on the second side of the electromechanical actuator 6.
- the angle return pulleys 35 arranged on the second side of the electromechanical actuator 6 are hidden by a first locking device 20.
- the number of angle return pulleys is not limiting and can be different.
- Each angle return pulley 35 can be produced, for example, by an idle pulley, in other words mounted freely in rotation, in particular on the upper crosspiece 4a of the sleeping frame 4, or by a fixed pulley, in other words secured to its axis, in particular fixed on the upper crosspiece 4a of the sleeping frame 4.
- Each 35 bevel gear pulley may be a pulley with a grooved wheel, generally called a sheave.
- the electromechanical actuator 6 and the flexible element 9 are arranged inside the crosspiece 47, configured to form a box and arranged above the window 2, in particular extending at least partly above the upper crosspiece 4a of the fixed frame 4.
- the electromechanical actuator 6 and the flexible element 9 are concealed inside the crosspiece 47, so as to guarantee the aesthetic appearance of the sliding window 2.
- winding pulley 19 is arranged inside the crosspiece 47 provided above the window 2.
- the crosspiece 47 may extend partially or completely in front of the fixed frame 4, in the assembled configuration of the window 2 relative to the building. In this case, the crosspiece 47 extends at least partly projecting relative to the fixed frame 4.
- the crosspiece 47 can either be arranged above the upper crosspiece 4a of the fixed frame 4 or arranged opposite the upper crosspiece 4a of the fixed frame 4, that is to say protruding towards the interior of the building, in the assembled configuration of the window 2 relative to the building.
- the crosspiece 47 comprises a cover, not shown, configured to access the motorized drive device 5 and, more particularly, the electromechanical actuator 6 and the flexible element 9, as well as the winding pulley 19.
- the cover makes it possible to carry out a maintenance operation on the motorized drive device 5 and/or a repair operation on the latter.
- the cover extends along the entire length V of the crosspiece 47.
- the hood extends only along a portion of the length V of the crosspiece 47.
- the only opening 3a, among the first and second openings 3a, 3b, which can be driven in sliding by the motorized drive device 5 is an interior opening of the window 2.
- the interior opening 3a is arranged on the interior side relative to the building, in the assembled configuration of the window 2 in the building.
- the flexible element 9 allowing the sliding drive of the first opening leaf 3a relative to the fixed frame 4 is kept inaccessible from outside the building and, more particularly, from the window 2, when the first opening leaf 3a is in the closed position, as shown in FIG. figure 1 , or a safe ventilation position, as shown in figure 2 , relative to the sleeping frame 4.
- the secure ventilation position in other words a locked half-open position, is a position of the first opening leaf 3a relative to the fixed frame 4 in which the first opening leaf 3a is half-open relative to the fixed frame 4 and kept locked by the first locking device 20.
- the locked half-open position is arranged between the open position and the closed position of the first opening leaf 3a relative to the fixed frame 4.
- the locked half-open position is a partially open position of the first opening leaf 3a relative to the fixed frame 4, for which the frame 15 of the first opening leaf 3a is spaced from the fixed frame 4 by a predetermined distance, in particular of the order of a few centimeters.
- the second opening 3b is manually movable, it can be moved by the user independently of the first opening 3a, in particular in the event of a lack of electrical power supply to the motorized drive device 5 or a breakdown of the motorized drive device 5.
- the motorized drive device 5 makes it possible to automatically slide the first opening 3a relative to the fixed frame 4 in the sliding direction D, by winding, respectively by unwinding, the first strand 9a of the flexible element 9 around the first part of the winding pulley 19 and by unwinding, respectively by winding, the second strand 9b of the flexible element 9 around the second part of the winding pulley 19.
- the motorized drive device 5 thus makes it possible to close and open the first opening leaf 3a in a motorized manner relative to the fixed frame 4, by sliding in the sliding direction D.
- the use of the flexible element 9 to move the first opening 3a relative to the fixed frame 4 makes it possible to minimize the costs of obtaining the motorized drive device 5, as well as to minimize the size of the motorized drive device 5, in particular compared to a belt.
- window 2 also includes a second locking device 21 for locking the first opening 3a relative to the fixed frame 4 in the closed position and thus moving it into the locked closed position.
- the window 2 comprises a control device 22 for controlling the second locking device 21, as illustrated in figure 1 .
- the control device 22 is configured, on the one hand, to cooperate with the second locking device 21 and, on the other hand, to be actuated by means of the flexible element 9 and, more particularly by means of the shuttle 45, when the electromechanical actuator 6 is electrically activated.
- the second locking device 21 is part of the previously mentioned fitting system of the window 2.
- the drive arm 18 supports the control device 22.
- the drive arm 18 and the control device 22 form a solid mechanical assembly.
- control device 22 advantageously comprises a drive element 30.
- This drive element 30 is, on the one hand, connected to the shuttle 45 and, on the other hand, mounted in rotation relative to the drive arm 18.
- the drive element 30 has a clearance relative to the drive arm 18 and, more particularly, relative to a casing 38 of the drive arm 18.
- control device 22 comprises a plurality of drive elements 30.
- Each of the drive elements 30 is configured to be connected to the shuttle 45.
- one of the drive elements 30 is connected to the shuttle 45, depending on the positioning of the first locking device 20 relative to the crosspiece 47, in the sliding direction D.
- the trunk formed by the crosspiece 47 and its cover, comprises a slot 24 configured to allow the passage of an upper part of the drive arm 18, during a movement of the drive arm 18 relative to the dormant frame 4 in the sliding direction D, as illustrated in FIG. figure 4 .
- the drive arm 18 can be driven in movement relative to the box, in the assembled configuration of the window 2, while being connected to the drive element 30 of the control device 22.
- the upper portion of the drive arm 18 is configured to move within the slot 24 provided in the trunk.
- a lower portion of the drive arm 18 is arranged outside the trunk.
- the drive arm 18 and the second locking device 21 are arranged in the upper part of the first lateral upright 15c of the frame 15 of the first opening 3a, in the assembled configuration of the window 2 relative to the building.
- the drive arm 18 and the second locking device 21 are arranged as close as possible to the flexible element 9, since the flexible element 9 extends inside the crosspiece 47.
- the second locking device 21 is arranged inside the first lateral upright 15c of the frame 15 of the first opening 3a.
- the second locking device 21 comprises at least one housing, a shaft, commonly called a square, a drive bell and a bolt, not shown.
- the drive bell comprises a housing.
- a first end of the shaft is arranged inside the housing of the drive bell.
- the bolt is configured to cooperate with a hole made in the rod of the cremone bolt.
- the drive bell is rotated inside the housing of the second locking device 21, then the bolt of the second locking device 21 is driven in translation, so as to move the rod of the espagnolette along the lateral upright 15c of the frame 15 of the first opening leaf 3a, in particular in a vertical direction, in the assembled configuration of the window 2 relative to the building.
- control device 22 comprises an actuating mechanism of the second locking device 21 configured to drive the shaft of the second locking device 21 in rotation, when the flexible element 9 is driven by the electromechanical actuator 6.
- the actuating mechanism of the control device 22 is configured to transform the translational movement of the flexible element 9 applied to the drive arm 18 via the shuttle 45, in particular by the drive element, during the electrical activation of the electromechanical actuator 6, into a rotational movement of the shaft of the second locking device 21, when locking or unlocking the first opening 3a relative to the fixed frame 4.
- the actuating mechanism of the control device 22 can be implemented by means of one or more lever arms and/or by one or more pinions.
- the first locking device 20 comprises a movable arm 23 around a first axis of rotation Y1.
- the movable arm 23 is configured to move relative to a fixed part of the window 2 around the first axis of rotation Y1.
- the movable arm 23 is configured to move relative to the crosspiece 47 around the first axis of rotation Y1.
- the movable arm 23 is assembled on the crosspiece 47 by means of an assembly element 25.
- the assembly element 25 comprises an opening 26 inside which a rotation shaft 27 is arranged, so as to allow a rotational movement of the movable arm 23 around the first axis of rotation Y1.
- the movable arm 23 is mounted in rotation relative to the assembly element 25 around the first axis of rotation Y1, by means of a pivot connection.
- the assembly element 25 is fixed to the crosspiece 47 by means of fixing elements, not shown.
- the assembly element 25 is configured to fix the first locking device 20 on a fixed part of the window 2, in particular the crosspiece 47.
- the fixing elements of the assembly element 25 on the crosspiece 47 comprise positioning elements inside the groove 49 of the crosspiece 47, such as, for example, guide pins, as well as fixing screws.
- Each fixing screw is configured to pass through a through hole provided in the crosspiece 47 and to screw into a fixing hole of the assembly element 25.
- the type of fastening elements of the assembly element on the crosspiece is not limiting and may be different. These may include, in particular, elastic snap-fastening elements.
- the first locking device 20 rests on the crosspiece 47. And, more particularly, a wall of the assembly element 25 of the first locking device 20 rests on a wall of the crosspiece 47.
- the assembly element 25 of the first locking device 20 is produced in the form of a stirrup.
- the first locking device 20 comprises a first elastic return element, not shown, arranged between the movable arm 23 and the assembly element 25.
- the first elastic return element makes it possible to ensure that the movable arm 23 is maintained in a rest position relative to the assembly element 25 and, more particularly, relative to the crosspiece 47.
- the first elastic return element is a spring, in particular of the pin type.
- the type of elastic return element between the movable arm and the assembly element is not limiting and may be different. It may be, in particular, a torsion spring, for example with spirals.
- the first elastic return element is located on the same axis of rotation Y1 as that of the movable arm 23.
- the movable arm 23 bears against a stop, not shown, of the assembly element 25.
- the movable arm 23 is configured to move relative to the sleeping frame 4 around the first axis of rotation Y1 and, more particularly, relative to the upper crosspiece 4a of the sleeping frame 4.
- the drive arm 18 is configured to cooperate with the movable arm 23 of the first locking device 20.
- the shuttle 45 is also configured to cooperate with the movable arm 23 of the first locking device 20.
- the movable arm 23 is configured to hold the drive arm 18 and, more particularly, the casing 38 of the drive arm 18, between the locked half-open position and the closed position of the first opening leaf 3a relative to the fixed frame 4, following the crossing of the locked half-open position, during a movement of the first opening leaf 3a relative to the fixed frame 4 from an open position to the closed position.
- the first locking device 20 comprises a release device 29 of the movable arm 23 relative to the drive arm 18.
- the release device 29 is configured to be activated, following the locking of the first opening 3a relative to the fixed frame 4 in the closed position, by means of the second locking device 21.
- the first locking device 20 makes it possible to lock the first opening 3a relative to the fixed frame 4 in the locked half-open position, by means of the motorized drive device 5.
- the first locking device 20 makes it possible to ensure the ventilation of the building in a secure manner by a half-opening of the first opening 3a relative to the fixed frame 4, in particular by means of simple parts.
- the unlocking of the first opening leaf 3a relative to the fixed frame 4 in connection with the first locking device 20 is implemented by means of the motorized drive device 5 configured to generate a movement of the first opening leaf 3a relative to the fixed frame 4 passing through the closed and locked position of the first opening leaf 3a relative to the fixed frame 4, by means of the second locking device 21.
- the electronic control unit 10 of the motorized drive device 5 makes it possible to control the movement of the first opening leaf 3a relative to the fixed frame 4 in order to lock the first opening leaf 3a relative to the fixed frame 4 in the locked half-open position and to unlock the first opening leaf 3a relative to the fixed frame 4 from the locked half-open position.
- the first locking device 20 thus makes it possible to prohibit, or at least delay, an attempted intrusion by an individual.
- the release device 29 is configured to be activated by means of the drive arm 18 and, more particularly, of the shuttle 45, in particular a ramp 40 of the shuttle 45, during a movement of the first opening leaf 3a relative to the fixed frame 4 from the closed position and, more particularly, the locked closed position to an open position of the first opening leaf 3a relative to the fixed frame 4.
- the activation of the release device 29, in particular by the shuttle 45, during a movement of the first opening 3a relative to the fixed frame 4 from the closed position to an open position of the first opening 3a relative to the fixed frame 4, makes it possible to release the drive arm 18 relative to the movable arm 23 of the first locking device 20.
- the drive arm 18 is unlocked relative to the movable arm 23 of the first locking device 20 and the first opening leaf 3a can be moved relative to the frame 4 beyond the locked half-open position, following the direction of movement of the first opening leaf 3a relative to the frame 4 from the closed position to an open position.
- the movable arm 23 comprises a stop 31.
- This stop 31 of the movable arm 23 is configured to limit the travel of the drive arm 18, following the crossing of this stop 31 corresponding to a maximum locked half-open position, during a movement of the first opening 3a relative to the fixed frame 4 from an open position to the closed position.
- the stop 31 of the movable arm 23 makes it possible to ensure that the first opening leaf 3a is held in position relative to the fixed frame 4 in the locked half-open position.
- the stop 31 of the movable arm 23 makes it possible to block the drive arm 18 and therefore to guarantee locking in the locked half-open position, where the pressing of the drive arm 18 against the stop 31 of the movable arm 23 corresponds to the maximum half-opening of the first opening 3a relative to the fixed frame 4.
- the drive arm 18, in particular a wall 18a of the drive arm 18, is configured to cooperate with a free end 23a of the movable arm 23, during a movement of the first opening leaf 3a relative to the fixed frame 4, in the direction of movement from an open position to the closed position of the first opening leaf 3a relative to the fixed frame 4.
- the drive arm 18 makes it possible to ensure that the free end 23a of the movable arm 23 is kept in contact with it, during a movement of the first opening leaf 3a relative to the fixed frame 4, in the direction of movement from an open position to the closed position of the first opening leaf 3a relative to the fixed frame 4.
- the free end 23a of the movable arm 23 is the part of the movable arm 23 comprising the stop 31.
- the movable arm 23 comprises a ramp 39 configured to cooperate with the drive arm 18 and, more particularly, with the wall 18a of the drive arm 18, in other words with the casing 38 of the drive arm 18.
- the release device 29 comprises a cam 32 movable about a second axis of rotation Y2. Furthermore, the cam 32 is configured to be moved relative to the movable arm 23.
- the cam 32 is assembled on the movable arm 23.
- the movable arm 23 comprises an opening, not shown, inside which is arranged a rotation shaft 33, so as to allow a rotational movement of the cam 32 around the second rotation shaft Y2.
- the cam 32 is mounted in rotation relative to the movable arm 23 by means of a pivot connection.
- the first locking device 20 comprises a second elastic return element 34 arranged between the movable arm 23 and the cam 32.
- the second elastic return element 34 makes it possible to ensure that the cam 32 is maintained in a rest position relative to the movable arm 23.
- the second elastic return element 34 is a spring, in particular of the pin type.
- the type of elastic return element between the movable arm and the cam is not limiting and may be different. It may be, in particular, a torsion spring, for example with spirals.
- the second elastic return element 34 is located on the same axis of rotation Y2 as that of the cam 32.
- the cam 32 bears against a support stop, not shown, of the movable arm 23.
- the ramp 40 of the shuttle 45 is configured to cooperate with the cam 32, during a movement of the first opening leaf 3a relative to the fixed frame 4, both in the direction of movement from an open position to the closed position of the first opening leaf 3a relative to the fixed frame 4 and in the direction of movement from the closed position to an open position of the first opening leaf 3a relative to the fixed frame 4.
- the ramp 40 of the shuttle 45 makes it possible to guarantee that the release device 29 remains in contact with the cam 32, during a movement of the first opening leaf 3a relative to the fixed frame 4, regardless of the direction of movement of the first opening leaf 3a relative to the fixed frame 4.
- ramp 40 is integrated into shuttle 45.
- the ramp 40 of the shuttle 45 makes it possible to avoid the drive arm 18 coming into contact with the movable arm 23 of the first unlocking device 20, during the unlocking the first locking device 20.
- the shuttle 45 in particular the ramp 40 of the shuttle 45, is brought into contact with the cam 32.
- the movement of the shuttle 45 by means of the motorized drive device 5 makes it possible to push the movable arm 23, against the force exerted by the second elastic return element 34, so as to disengage the stop 31 of the movable arm 23 relative to the drive arm 18.
- the first locking device 20 is unlocked and the first opening leaf 3a can be moved relative to the frame 4 to an open position located beyond the locked half-open position, by means of the motorized drive device 5.
- the release device 29 and, more particularly, the cam 32 of the release device 29 is in contact with the shuttle 45 and, more particularly, with the ramp 40 of the shuttle 45.
- the motorized drive device 5 drives the first opening leaf 3a relative to the fixed frame 4 in a translational movement, as illustrated by an arrow F2, in the sliding direction D, in particular on the figure 12 .
- the first opening leaf 3a is in the locked closed position relative to the fixed frame 4.
- the release device 29 and, more particularly, the cam 32 of the release device 29 is no longer in contact with the shuttle 45 and, more particularly, with the ramp 40 of the shuttle 45, as illustrated in FIG. figure 5 .
- the release device 29 is activated, in other words brought back in a rest position, in particular by means of the second elastic return element 34.
- the locking of the first opening 3a relative to the fixed frame 4 in the closed position, by means of the second locking device 21, is implemented, in particular, by means of the flexible element 9, the shuttle 45 and the control device 22, as described above.
- the first locking device 20 also comprises an adjustment device 50 for the position of the release device 29 relative to the movable arm 23.
- the adjustment device 50 makes it possible to compensate for uncertainties in the positioning of the first locking device 20 relative to the crosspiece 47 and the fixed frame 4.
- the adjustment device 50 makes it possible to take into account dispersions of dimensions and positioning of the first locking device 20 and, more particularly, of the movable arm 23 and of the release device 29 relative to the shuttle 45 and to the sleeping frame 4.
- the release device 29 comprises the cam 32, movable around a second axis of rotation Y2', not shown, and the second elastic return element 34, in a manner similar to the first embodiment.
- the adjustment device 50 makes it possible to adjust the contact length between the release device 29 and, more particularly, the cam 32 and the shuttle 45.
- the adjustment device 50 comprises a plate 51.
- the plate 51 is adjustable in position relative to the movable arm 23, in a direction of movement, in particular in the sliding direction D.
- the cam 32 is assembled on the plate 51.
- the adjustment device 50 of the first locking device 20 makes it possible to adjust the position of the release device 29 and, more particularly, of the cam 32 relative to the movable arm 23, following a translational movement.
- the plate 51 comprises an opening, not shown, inside which the rotation shaft 33 is arranged, so as to allow a rotational movement of the cam 32 around the second rotation shaft Y2'.
- the cam 32 is mounted in rotation relative to the plate 51 and, more particularly, relative to the movable arm 23 by means of a pivot connection.
- the second elastic return element 34 is arranged between the plate 51 and the cam 32.
- the second elastic return element 34 makes it possible to ensure that the cam 32 is maintained in a rest position relative to the plate 51 and, more particularly, relative to the movable arm 23.
- the second elastic return element 34 is a spring, in particular of the pin type.
- the type of elastic return element between the plate and the cam is not limiting and may be different. It may be, in particular, a torsion spring, for example with spirals.
- the second elastic return element 34 is located on the same axis of rotation Y2' as that of the cam 32.
- the cam 32 bears against a support stop, not shown, of the plate 51.
- the plate 51 comprises a groove, not shown, configured to cooperate with a rib 53 formed in the movable arm 23, so as to move the plate 51 relative to the movable arm 23, following a translational movement.
- the adjustment device 50 comprising at least the plate 51 and the cam 32, can be moved relative to the movable arm 23, by means of a sliding connection.
- the adjustment device 50 also comprises at least one fixing element 54 of the plate 51 relative to the movable arm 23.
- the fixing element 54 of the plate 51 relative to the movable arm 23 is a fixing screw.
- the fixing element 54 is configured to pass through a passage opening 52 provided in the plate 51 and to bear against a wall of the movable arm 23, in particular a face of the groove 53.
- the maintenance in position of the plate 51 relative to the movable arm 23 is implemented by applying pressure between the plate 51 and the movable arm 23, by means of the fixing element 54, which here is a pressure screw.
- the passage opening 52 of the plate 51 is oblong in shape.
- the adjustment device 50 is implemented by means of the movable arm 23 which is telescopic, that is to say that the movable arm 23 comprises a first part and a second part, the first and second parts of the movable arm 23 being configured to slide relative to each other, in particular in the sliding direction D.
- the adjustment device 50 is implemented by means of the assembly element 25 connecting the movable arm 23 to the crosspiece 47, which can be moved inside the groove 49 of the crosspiece 47, in particular in the sliding direction D, and be held in position relative to the crosspiece 47 by means of a fixing element, in particular a pressure screw bearing against the crosspiece 47.
- the shuttle 45 comprises a device for adjusting the position of the ramp 40 relative to a body of the shuttle 45.
- the device for adjusting the ramp 40 relative to the body of the shuttle 45 makes it possible to compensate for uncertainties in the positioning of the first locking device 20 relative to the crosspiece 47 and the sleeping frame 4.
- the device for adjusting the ramp 40 relative to the body of the shuttle 45 makes it possible to take into account dispersions of dimensions and positioning of the first locking device 20 and, more particularly, of the movable arm 23 and of the release device 29 relative to the shuttle 45 and to the sleeping frame 4.
- the device for adjusting the ramp 40 relative to the body of the shuttle 45 makes it possible to adjust the contact length between the release device 29 and, more particularly, the cam 32 and the ramp 40 of the shuttle 45.
- the device for adjusting the position of the ramp 40 relative to the body of the shuttle 45 comprises a slide, so as to move the ramp 40 by sliding relative to the body of the shuttle 45, in particular in the sliding direction D, and at least one fixing element, in particular a pressure screw, so as to maintain the ramp 40 in position relative to the body of the shuttle 45.
- control device 22 according to the fourth embodiment.
- control device 22 comprises a device for adjusting the position of the drive element 30 relative to the drive arm 18.
- the device for adjusting the drive element 30 relative to the drive arm 18 makes it possible to compensate for uncertainties in the positioning of the first locking device 20 relative to the crosspiece 47 and the sleeping frame 4.
- the device for adjusting the drive element 30 relative to the drive arm 18 makes it possible to take into account dispersions in the dimensions and positioning of the first locking device 20 and, more particularly, of the movable arm 23 and of the release device 29 relative to the shuttle 45 and the sleeping frame 4.
- the device for adjusting the drive element 30 relative to the drive arm 18 makes it possible to adjust the contact length between the release device 29 and, more particularly, the cam 32 and the shuttle 45.
- the device for adjusting the position of the drive element 30 relative to the drive arm 18 comprises a slide, so as to move the drive element 30 by sliding relative to an element of the control device 22, in particular in the sliding direction D, and at least one fixing element, in particular a pressure screw, so as to hold the drive element 30 in position relative to the element of the control device 22.
- the method for controlling the operation of the motorized drive device 5 comprises a first control step, so as to position the first opening 3a relative to the fixed frame 4 in the locked half-open position.
- the first control step is implemented by sending a control command to the electronic control unit 10 of the motorized drive device 5, in particular by means of one of the local 12 or central 13 control units or even a sensor.
- the first control step can thus be implemented manually, in particular by the user, or automatically.
- the method comprises a first step of moving the first opening leaf 3a relative to the fixed frame 4 from the closed position to an open position, in which the shuttle 45 is positioned beyond the first locking device 20 in the sliding direction D of the first opening leaf 3a relative to the fixed frame 4.
- the drive arm 18, in particular the drive element 30 of the control device 22 is also positioned beyond the first locking device 20 in the sliding direction D of the first opening leaf 3a relative to the fixed frame 4.
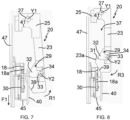
- the direction of movement of the first opening 3a relative to the fixed frame 4, during the first movement step is illustrated by the arrow F1 at Figures 5 to 7 .
- the first step of moving the first opening 3a relative to the fixed frame 4 is implemented by the electrical activation of the electromechanical actuator 6.
- the drive arm 18 When the first opening 3a is in the closed position relative to the fixed frame 4, the drive arm 18 is arranged inside a recess 37 of the first locking device 20, as illustrated in figure 5 .
- the recess 37 of the first locking device 20 is defined at a first end by the stop 31 of the movable arm 23 and at a second end by the assembly element 25 and, more particularly, by a stop 41 of the assembly element 25.
- the first end of the recess 37 is opposite the second end thereof.
- the shuttle 45 in particular the ramp 40 of the shuttle 45, is moved by means of the flexible element 9 and bears on the cam 32.
- the cam 32 is held in position by means of the aforementioned support stop, between the cam 32 and the movable arm 23.
- the cam 32 is stationary, around the axis of rotation Y2, during this movement of the first opening 3a relative to the fixed frame 4 from the closed position to the open position.
- the movable arm 23 is moved relative to the assembly element 25 and, more particularly, relative to the crosspiece 47 by a rotational movement R1 around the first axis of rotation Y1, as illustrated in figures 6 And 7 .
- the rotational movement R1 of the movable arm 23 relative to the assembly element 25 is implemented against the force of the first elastic return element arranged at the level of the first axis of rotation Y1.
- the method comprises a second step of moving the first opening leaf 3a relative to the fixed frame 4 from the open position to the locked half-open position of the first opening leaf 3a relative to the fixed frame 4.
- the locked half-open position of the first opening 3a relative to the fixed frame 4 corresponds to the position where the drive arm 18 is positioned inside the recess 37 of the first locking device 20.
- a so-called maximum locked half-open position of the first opening 3a relative to the fixed frame 4 corresponds to the drive arm 18 resting against the stop 31 of the movable arm 23, as illustrated in figure 10 .
- the direction of movement of the first opening 3a relative to the fixed frame 4, during the second movement step is illustrated by the arrow F2 at figures 9 to 10 .
- the second step of moving the first opening 3a relative to the fixed frame 4 is implemented by the electrical activation of the electromechanical actuator 6.
- the support of the drive arm 18 against the stop 31 of the movable arm 23 makes it possible to prevent the movement of the first opening leaf 3a relative to the fixed frame 4 towards an open position of the first opening leaf 3a relative to the fixed frame 4.
- the movable arm 23, in particular the free end 23a of the movable arm 23, is moved relative to the assembly element 25 and, more particularly, relative to the crosspiece 47, in other words relative to a fixed part of the window 2, initially by a first rotational movement R1 about the first axis of rotation Y1, as illustrated in FIG. figure 9 , and, in a second step, by a second rotational movement R3 around the first axis of rotation Y1, as illustrated in figure 10 .
- the first rotational movement R1 around the first axis of rotation Y1 of the movable arm 23 is opposite to the second rotational movement R3 around the first axis of rotation Y1 of the movable arm 23.
- the first rotational movement R1 of the movable arm 23 relative to the assembly element 25 is implemented against the force of the first elastic return element arranged at the first axis of rotation Y1. Furthermore, the second rotational movement R3 about the first axis of rotation Y1 of the movable arm 23 relative to the assembly element 25 is implemented by the force exerted by the first elastic return element arranged at the first axis of rotation Y1.
- the movable arm 23 is moved into its rest position relative to the assembly element 25 and, more particularly, relative to the crosspiece 47 by the second rotational movement R3 around the first axis of rotation Y1, as illustrated in FIG. figure 10 .
- the cam 32 is moved relative to the movable arm 23 by a rotational movement R2 around the second axis of rotation Y2, as illustrated in figure 9 .
- the cam 32 is movable in rotation about the axis of rotation Y2 during this movement of the first opening leaf 3a relative to the fixed frame 4 from the open position to the locked half-open position of the first opening leaf 3a relative to the fixed frame 4.
- the second moving step may comprise a first sub-step of moving the first opening leaf 3a relative to the fixed frame 4 from the open position to a position where the drive arm 18 is located inside the recess 37 of the first locking device 20, then a second sub-step of moving the first opening leaf 3a relative to the fixed frame 4 from the position where the drive arm 18 is located inside the recess 37 of the first locking device 20 to the maximum locked half-open position of the first opening leaf 3a relative to the fixed frame 4.
- the direction of movement of the first opening leaf 3a relative to the fixed frame 4, during the first additional movement step corresponds to that of the arrow F2. Furthermore, the direction of movement of the first opening leaf 3a relative to the fixed frame 4, during the second additional movement step, corresponds to that of the arrow F1.
- the second movement step only comprises moving the first opening leaf 3a relative to the fixed frame 4 from the open position to the locked half-open position of the first opening leaf 3a relative to the fixed frame 4.
- the method comprises a step of stopping the first opening leaf 3a relative to the fixed frame 4 in the locked half-open position of the first opening leaf 3a relative to the fixed frame 4, as illustrated in figure 10 or to the figure 11 .
- step of stopping the first opening 3a relative to the fixed frame 4 is implemented by the electrical deactivation of the electromechanical actuator 6.
- the steps of the control method described above are implemented automatically by the motorized drive device 5 and, more particularly, by the electronic control unit 10, so as to reach the locked half-open position of the first opening 3a relative to the fixed frame 4.
- the method comprises a second control step, so as to deactivate the first locking device 20.
- the second control step is implemented by sending a control command to the electronic control unit 10 of the motorized drive device 5, in particular by means of one of the local 12 or central 13 control units or even a sensor.
- the second control step can thus be implemented manually, in particular by the user, or automatically.
- the method comprises a third step of moving the first opening 3a relative to the fixed frame 4 from the locked half-open position to the locked closed position.
- the direction of movement of the first opening 3a relative to the fixed frame 4, during the third movement step is illustrated by the arrow F2 at Figures 11 and 12 .
- the third step of moving the first opening 3a relative to the fixed frame 4 is implemented by the electrical activation of the electromechanical actuator 6.
- the deactivation of the first locking device 20 is implemented when the shuttle 45 is positioned inside the recess 37 of the first locking device 20 and, more particularly, when the cam 32 is moved to its rest position relative to the movable arm 23 by a rotational movement R4 around the second axis of rotation Y2, as illustrated in FIG. figure 5 .
- the deactivation of the first locking device 20 is put in operation only when the shuttle 45 is in the position corresponding to the locked closed position of the first opening 3a relative to the fixed frame 4.
- the movement of the cam 32 into its rest position relative to the movable arm 23 by the rotational movement R4 around the second axis of rotation Y2 is configured to be implemented only when the shuttle 45 is in the position corresponding to the locked closed position of the first opening 3a relative to the fixed frame 4.
- the first locking device 20 is configured to hold the first opening leaf 3a in a half-open position locked relative to the fixed frame 4, that is to say that the first locking device 20 is configured to prevent manual opening of the first opening leaf 3a relative to the fixed frame 4, in other words the drive arm 18 is retained inside the recess 37 of the first locking device 20 by the stop 31 of the movable arm 23.
- the control device 22 housed in the drive arm 18 activates the second locking device 21, in particular by tilting the drive element 30 inside the drive arm 18, so as to unlock the second locking device 21.
- the first opening 3a returns to its initial position relative to the fixed frame 4, as well as the movable arm 23 relative to the assembly element 25 and, more particularly, to the crosspiece 47, as well as the cam 32 relative to the movable arm 23, as prior to the first displacement step.
- the cam 32 when the first opening 3a is in the closed position locked relative to the sleeping frame 4, the cam 32 is in its rest position, in other words the cam 32 is no longer in contact with the shuttle 45, in particular the ramp 40 of the shuttle 45.
- the method comprises a step of monitoring the position of the first opening leaf 3a relative to the fixed frame 4.
- the monitoring step makes it possible to detect a movement of the first opening 3a relative to the fixed frame 4.
- the monitoring step is implemented by at least one position detection sensor of an output shaft of the electric motor 7 of the electromechanical actuator 6.
- the output shaft of the electric motor 7 of the electromechanical actuator 6 is driven in rotation through the motorized drive device 5.
- the movement of the first opening 3a relative to the fixed frame 4 is determined by the position detection sensor of the output shaft of the electric motor 7.
- the position detection sensor of the output shaft of the electric motor 7 is a Hall effect sensor.
- the monitoring step is implemented by at least one sensor for detecting the position of an output shaft of the electromechanical actuator 6.
- the monitoring step is implemented by at least one sensor for detecting the position of the first opening 3a relative to the fixed frame 4.
- position detection sensors are not limiting and may be different. They may include, in particular, one or more optical sensors.
- the monitoring step is implemented through the electronic control unit 10 of the motorized drive device 5.
- the method comprises a step of determining an attempted intrusion.
- the step of determining an intrusion attempt is inhibited.
- the movement of the first opening 3a relative to the fixed frame 4 detected during the monitoring step is considered to be a movement implemented voluntarily by a user.
- the monitoring step makes it possible to determine whether the movement of the first opening 3a relative to the fixed frame 4 is implemented manually.
- an attempted intrusion is determined in the case where the length of the movement of the first opening 3a relative to the fixed frame 4 is greater than a predetermined threshold value M during a predetermined period of time T.
- an attempted intrusion is determined in the case where the length of the displacement of the first opening 3a relative to the fixed frame 4 is greater than one centimeter over a period of time of one minute.
- the step of determining an attempted intrusion is implemented through the electronic control unit 10 of the motorized drive device 5.
- the method comprises a fourth step of moving the first opening 3a relative to the fixed frame 4 from the locked half-open position to the locked closed position.
- the direction of movement of the first opening 3a relative to the fixed frame 4, during the fourth movement step corresponds to that of the arrow F2.
- the fourth step of moving the first opening 3a relative to the fixed frame 4 is implemented by the electrical activation of the electromechanical actuator 6.
- This fourth movement step is implemented in a similar manner to the third movement step.
- the fourth step of the control method is implemented automatically by the motorized drive device 5 and, more particularly, by the electronic control unit 10, so as to place the first opening 3a relative to the fixed frame 4 in the closed position, itself locked by the second locking device 21.
- the window 2 and, more particularly, the building is protected against attempted intrusion by closing the first opening 3a relative to the fixed frame 4 by means of the motorized drive device 5.
- the method Prior to the fourth displacement step, the method comprises a step of waking up the electromechanical actuator 6 from a standby state.
- the method can also comprise a step of transmitting information to an alarm system, not shown.
- the alarm system can trigger a siren, so as to emit an audible signal, emit a notification to at least one mobile terminal, for example to a smartphone, so as to inform one or more users, and/or emit a notification to the central control unit, so as to command the closing of the screen of each concealment device, for example of each shutter.
- the first locking device makes it possible to lock the opening relative to the fixed frame in the locked half-open position by means of the motorized drive device.
- the first locking device makes it possible to ensure the ventilation of the building in a secure manner by a half-opening of the opening relative to the fixed frame, in particular by means of simple parts.
- the unlocking of the opening relative to the fixed frame in connection with the first locking device is implemented by means of the motorized drive device configured to generate a movement of the opening relative to the fixed frame passing through the closed and locked position of the opening relative to the fixed frame by means of the second locking device.
- the electronic control unit of the motorized drive device makes it possible to control the movement of the opening leaf relative to the fixed frame in order to lock the opening leaf relative to the fixed frame in the locked half-open position and to unlock the opening leaf relative to the fixed frame from the locked half-open position.
- the first locking device thus makes it possible to prohibit, or at least delay, an attempted intrusion by an individual.
- the motorized drive device 5 can be configured to slide several openings 3a, 3b by means of the flexible element 9, in the same direction of movement or in an opposite direction of movement.
- the electric motor 7 of the electromechanical actuator 6 may be of the asynchronous or direct current type.
Landscapes
- Power-Operated Mechanisms For Wings (AREA)
Description
- La présente invention concerne un procédé de commande en fonctionnement d'un dispositif d'entraînement motorisé d'une fenêtre coulissante pour un bâtiment, une fenêtre coulissante pour un bâtiment associée à un tel procédé de commande, ainsi qu'une installation domotique comprenant une telle fenêtre coulissante.
- De manière générale, la présente invention concerne le domaine des fenêtres comprenant un dispositif d'entraînement motorisé mettant en mouvement un ouvrant par rapport à un cadre dormant suivant un mouvement de coulissement, entre au moins une première position et au moins une deuxième position. Un dispositif d'entraînement motorisé d'une telle fenêtre comprend un actionneur électromécanique.
- On connaît déjà le document
US 3 352 586 A qui décrit une fenêtre coulissante pour un bâtiment comprenant un cadre dormant, un ouvrant et un dispositif de verrouillage de l'ouvrant par rapport au cadre dormant. Le dispositif de verrouillage comprend un premier sous-ensemble et un deuxième sous-ensemble. Le premier sous-ensemble est fixé sur le cadre dormant. Le deuxième sous-ensemble est fixé sur l'ouvrant. Le deuxième sous-ensemble comprend un doigt mobile autour d'un axe de rotation et un élément de rappel élastique. L'élément de rappel élastique est configuré pour amener le doigt mobile vers une position de repos. Le doigt mobile est configuré pour coopérer avec le premier sous-ensemble, lors d'un déplacement de l'ouvrant par rapport au cadre dormant, de sorte à pouvoir verrouiller l'ouvrant par rapport au cadre dormant. - Le premier sous-ensemble comprend une crémaillère. Le doigt mobile du deuxième sous-ensemble est configuré pour coopérer avec des crans de la crémaillère du premier sous-ensemble.
- Le dispositif de verrouillage est configuré pour pouvoir verrouiller l'ouvrant par rapport au cadre dormant dans une position ouverte, une position fermée et une position entrebâillée verrouillée. La position entrebâillée verrouillée est disposée entre la position ouverte et la position fermée de l'ouvrant par rapport au cadre dormant.
- Cependant, un tel dispositif de verrouillage d'une fenêtre coulissante présente l'inconvénient de mettre en oeuvre le blocage du doigt mobile par rapport à la crémaillère, en fonction d'un déplacement manuel de l'ouvrant par rapport au cadre dormant.
- Par conséquent, une telle fenêtre coulissante nécessite de manoeuvrer l'ouvrant par rapport au cadre dormant manuellement, en particulier au moyen d'une poignée de manoeuvre disposée sur l'ouvrant.
- En outre, le déverrouillage de l'ouvrant par rapport au cadre dormant ne peut être mis en oeuvre que manuellement en tirant sur une chaîne reliée au doigt mobile.
- Par conséquent, un tel dispositif de verrouillage n'est pas compatible avec un dispositif d'entraînement motorisé configuré pour déplacer par coulissement l'ouvrant par rapport au cadre dormant.
- La présente invention a pour but de résoudre les inconvénients précités.
- A cet effet, la présente invention a pour objet un procédé de commande en fonctionnement d'un dispositif d'entraînement motorisé d'une fenêtre coulissante pour un bâtiment, tel que défini à la revendication 1.
- La présente invention a également pour objet une fenêtre coulissante pour un bâtiment, telle que définie à la revendication 8, ainsi qu'une installation domotique, telle que définie à la revendication 10.
- Des caractéristiques avantageuses de la présente invention sont définies aux autres revendications.
- Ainsi, le premier dispositif de verrouillage permet de verrouiller l'ouvrant par rapport au cadre dormant dans la position entrebâillée verrouillée au moyen du dispositif d'entraînement motorisé.
- De cette manière, le premier dispositif de verrouillage permet de garantir la ventilation du bâtiment de manière sécurisée par un entrebâillement de l'ouvrant par rapport au cadre dormant, en particulier au moyen de pièces simples.
- En outre, le déverrouillage de l'ouvrant par rapport au cadre dormant en lien avec le premier dispositif de verrouillage est mis en oeuvre au moyen du dispositif d'entraînement motorisé configuré pour générer un déplacement de l'ouvrant par rapport au cadre dormant passant par la position fermée et verrouillée de l'ouvrant par rapport au cadre dormant, au moyen du deuxième dispositif de verrouillage.
- De cette manière, le déverrouillage de l'ouvrant par rapport au cadre dormant est mis en oeuvre uniquement au moyen du dispositif d'entraînement motorisé.
- Par ailleurs, l'unité électronique de contrôle du dispositif d'entraînement motorisé permet de commander le déplacement de l'ouvrant par rapport au cadre dormant pour verrouiller l'ouvrant par rapport au cadre dormant dans la position entrebâillée verrouillée et pour déverrouiller l'ouvrant par rapport au cadre dormant de la position entrebâillée verrouillée.
- De cette manière, l'atteinte de la position entrebâillée verrouillée par le dispositif d'entraînement motorisé est mise en oeuvre de manière répétable, tout en garantissant une butée franche de l'ouvrant par rapport au cadre dormant par l'intermédiaire du premier dispositif de verrouillage.
- Le premier dispositif de verrouillage permet ainsi d'interdire, ou tout au moins retarder, une tentative d'intrusion d'un individu.
- D'autres particularités et avantages de l'invention apparaîtront encore dans la description ci-après.
- Aux dessins annexés, donnés à titre d'exemples non limitatifs :
- la
figure 1 est une vue schématique partielle en perspective d'une fenêtre coulissante conforme à un premier mode de réalisation de l'invention, où un premier ouvrant est dans une position fermée par rapport à un cadre dormant et où un capot d'une traverse est ôté ; - la
figure 2 est une vue analogue à lafigure 1 , où le premier ouvrant est dans une position entrebâillée verrouillée par rapport au cadre dormant ; - la
figure 3 est une vue analogue auxfigures 1 et2 , où le premier ouvrant est dans une position ouverte par rapport au cadre dormant ; - la
figure 4 est une vue schématique partielle en perspective de la fenêtre illustrée auxfigures 1 à 3 , où un premier dispositif de verrouillage est représenté ; - les
figures 5 à 12 sont des vues de dessus de la fenêtre similaires à celle de lafigure 4 illustrant différents états du premier dispositif de verrouillage ; et - la
figure 13 est une vue schématique de face d'une partie de la fenêtre coulissante illustrée auxfigures 1 à 3 , illustrant le premier dispositif de verrouillage selon un deuxième mode de réalisation. - On décrit tout d'abord, en référence aux
figures 1 à 3 , une installation domotique conforme à l'invention et installée dans un bâtiment comportant une ouverture 1, dans laquelle est disposée une fenêtre coulissante 2, conforme à un premier mode de réalisation de l'invention. - La fenêtre coulissante 2 peut également être appelée baie coulissante.
- La présente invention s'applique aux fenêtres coulissantes et aux portes-fenêtres coulissantes, équipées ou non d'un vitrage transparent.
- La fenêtre 2 comprend au moins un ouvrant 3a, 3b et un cadre dormant 4.
- Ici, et tel qu'illustré aux
figures 1 à 3 , la fenêtre 2 comprend un premier ouvrant 3a et un deuxième ouvrant 3b. - La fenêtre 2 comprend également un dispositif d'entraînement motorisé 5 configuré pour déplacer par coulissement un ouvrant 3a par rapport au cadre dormant 4.
- Ici, le dispositif d'entraînement motorisé 5 est configuré pour déplacer par coulissement un seul des premier et deuxième ouvrants 3a, 3b par rapport au cadre dormant 4, en particulier le premier ouvrant 3a.
- Ici, et tel qu'illustré aux
figures 1 à 3 , le deuxième ouvrant 3b est mobile manuellement, en particulier par l'action d'un utilisateur exerçant un effort sur une poignée, non représentée, du deuxième ouvrant 3b. - En variante, le deuxième ouvrant 3b est fixe.
- Le nombre d'ouvrants de la fenêtre n'est pas limitatif et peut être différent, en particulier égal à trois.
- Chaque ouvrant 3a, 3b comprend un cadre 15. Chaque ouvrant 3a, 3b peut également comprendre au moins une vitre 16 disposée dans le cadre 15.
- Le nombre de vitres de l'ouvrant n'est pas limitatif et peut être différent, en particulier égal à deux ou plus.
- Le cadre 15 de chaque ouvrant 3a, 3b comporte une traverse supérieure 15a, une traverse inférieure, non représentée, et des premier et deuxième montants latéraux 15c, dans la configuration assemblée de la fenêtre 2 par rapport au bâtiment, comme illustré aux
figures 1 à 3 . - Ici et comme illustré aux
figures 1 à 3 , le premier montant latéral 15c du cadre 15 du premier ouvrant 3a est le montant latéral 15c situé sur la droite du premier ouvrant 3a. En outre, le deuxième montant latéral 15c du cadre 15 du premier ouvrant 3a est le montant latéral 15c situé sur la gauche du premier ouvrant 3a. - Le premier montant latéral 15c du cadre 15 du premier ouvrant 3a est opposé au deuxième montant latéral 15c du cadre 15 du premier ouvrant 3a.
- De même, le premier montant latéral 15c du cadre 15 du deuxième ouvrant 3b est le montant latéral 15c situé sur la droite du deuxième ouvrant 3b. En outre, le deuxième montant latéral 15c du cadre 15 du deuxième ouvrant 3b est le montant latéral 15c situé sur la gauche du deuxième ouvrant 3b.
- Le premier montant latéral 15c du cadre 15 du deuxième ouvrant 3b est opposé au deuxième montant latéral 15c du cadre 15 du deuxième ouvrant 3b.
- Le cadre dormant 4 comporte une traverse supérieure 4a, une traverse inférieure, non représentée, et des premier et deuxième montants latéraux 4c, dans la configuration assemblée de la fenêtre 2 par rapport au bâtiment, comme illustré aux
figures 1 à 3 . - Ici et comme illustré aux
figures 1 à 3 , le premier montant latéral 4c du cadre dormant 4 est le montant latéral 4c situé sur la droite du cadre dormant 4. En outre, le deuxième montant latéral 4c du cadre dormant 4 est le montant latéral 4c situé sur la gauche du cadre dormant 4. - Le premier montant latéral 4c du cadre dormant 4 est opposé au deuxième montant latéral 4c du cadre dormant 4.
- La traverse supérieure 4a, la traverse inférieure et les deux montants latéraux 4c du cadre dormant 4 présentent respectivement une face intérieure et au moins une face extérieure.
- Les faces intérieures de la traverse supérieure 4a, de la traverse inférieure et des deux montants latéraux 4c du cadre dormant 4 sont orientées vers l'intérieur de la fenêtre 2 et, en particulier, vers un rebord extérieur du cadre 15 de chaque ouvrant 3a, 3b.
- Les faces extérieures de la traverse supérieure 4a, de la traverse inférieure et des deux montants latéraux 4c du cadre dormant 4 sont orientées vers l'extérieur de la fenêtre 2.
- La fenêtre 2 comprend également un système de ferrure, non représenté, ménagé entre le cadre dormant 4 et chaque ouvrant 3a, 3b. Le système de ferrure de la fenêtre 2 n'est pas représenté sur les
figures 1 à 3 , de sorte à faciliter la lecture de celles-ci. - Le système de ferrure de la fenêtre coulissante 2 permet de faire coulisser chaque ouvrant 3a, 3b par rapport au cadre dormant 4 selon une direction de coulissement D, dans l'exemple horizontale, dans la configuration assemblée de la fenêtre 2 par rapport au bâtiment, comme illustré aux
figures 1 à 3 . - Avantageusement, le système de ferrure comprend une crémone et des éléments de verrouillage du premier ouvrant 3a par rapport au cadre dormant 4.
- Ici, le système de ferrure est monté le long du premier montant latéral 15c du cadre 15 du premier ouvrant 3a.
- Ici, la crémone est disposée à l'intérieur du premier montant latéral 15c du cadre 15 du premier ouvrant 3a.
- En variante, non représentée, la crémone peut également être disposée en partie à l'intérieur de la traverse supérieure 15a ou de la traverse inférieure du cadre 15 du premier ouvrant 3a.
- Avantageusement, la crémone comporte au moins une tringle. En outre, la crémone comprend également un corps.
- En pratique, le corps de la crémone est fixe par rapport au premier montant latéral 15c du cadre 15 du premier ouvrant 3a. En outre, la tringle est configurée pour se déplacer par rapport au corps de la crémone.
- Avantageusement, la tringle est réalisée en plusieurs parties reliées entre elles, en particulier au moyen d'éléments de maintien.
- Ici, le déplacement de la tringle de la crémone est mis en oeuvre le long du premier montant latéral 15c du cadre 15 du premier ouvrant 3a, en particulier selon une direction verticale, dans la configuration assemblée de la fenêtre 2 par rapport au bâtiment.
- Avantageusement, la tringle de la crémone comprend au moins un crochet formant un élément de verrouillage. Le cadre dormant 4, en particulier le premier montant latéral 4c du cadre dormant 4, comprend au moins une gâche, non représentée. Chaque crochet de la tringle est configuré pour coopérer avec la gâche précitée du cadre dormant 4.
- Les crochets de la tringle, ainsi que les gâches ménagées dans le cadre dormant 4, forment au moins en partie les éléments de verrouillage du système de ferrure.
- Lorsque les crochets de la tringle sont engagés dans les gâches du cadre dormant 4, le premier ouvrant 3a est dans une position dite fermée verrouillée, qui est à la fois fermée et verrouillée par rapport au cadre dormant 4.
- Lorsque les crochets de la tringle sont désengagés par rapport aux gâches du cadre dormant 4, le premier ouvrant 3a est dans une position déverrouillée par rapport au cadre dormant 4, pouvant être, en outre, fermée ou ouverte.
- La traverse supérieure 4a du cadre dormant 4 comprend un rail de coulissement 11a pour permettre un coulissement du premier ouvrant 3a et un rail de coulissement, non représenté, pour permettre un coulissement du deuxième ouvrant 3b. La traverse inférieure du cadre dormant 4 comprend également deux rails de coulissement, respectivement pour le premier ouvrant 3a et le deuxième ouvrant 3b.
- Ainsi, chacune des traverses supérieure 4a et inférieure du cadre dormant 4 comprend un premier rail de coulissement 11a ou équivalent pour le premier ouvrant 3a et un deuxième rail de coulissement ou équivalent pour le deuxième ouvrant 3b.
- De cette manière, les premier et deuxième ouvrants 3a, 3b sont configurés pour se déplacer respectivement le long des premier et deuxième rails de coulissement 11a et équivalents.
- En pratique, les premier et deuxième rails de coulissement 11a ou équivalents sont disposés parallèlement l'un par rapport à l'autre. En outre, les premier et deuxième rails de coulissement 11a ou équivalents sont décalés l'un par rapport à l'autre suivant l'épaisseur du cadre dormant 4.
- La fenêtre 2 comprend des éléments de coulissement, non représentés, permettant le déplacement de chaque ouvrant 3a, 3b par rapport au cadre dormant 4. Les éléments de coulissement sont disposés à l'intérieur des premier et deuxième rails de coulissement de la traverse inférieure.
- En pratique, les éléments de coulissement comprennent des roulettes disposées sous les premier et deuxième ouvrants 3a, 3b. Les roulettes sont configurées pour rouler à l'intérieur des premier et deuxième rails de coulissement de la traverse inférieure.
- Une position d'ouverture par coulissement, partielle ou maximale, de chaque ouvrant 3a, 3b par rapport au cadre dormant 4 correspond à une position d'aération du bâtiment.
- Le dispositif d'entraînement motorisé 5 permet de déplacer automatiquement par coulissement le premier ouvrant 3a par rapport au cadre dormant 4, en particulier entre la position d'ouverture maximale par coulissement du premier ouvrant 3a par rapport au cadre dormant 4 et la position fermée du premier ouvrant 3a par rapport au cadre dormant 4.
- Le dispositif d'entraînement motorisé 5 comprend un actionneur électromécanique 6. L'actionneur électromécanique 6 comprend un moteur électrique 7. L'actionneur électromécanique 6 comprend également un arbre de sortie 8, qui est rotatif autour d'un axe de rotation X.
- Ici, l'axe de rotation X est parallèle à la direction de coulissement D du premier ouvrant 3a par rapport au cadre dormant 4 et, dans le cas présent, du deuxième ouvrant 3b par rapport au cadre dormant 4.
- Avantageusement, le moteur électrique 7 de l'actionneur électromécanique 6 est de type à vitesse variable. Le moteur électrique 7 est configuré pour entraîner en rotation l'arbre de sortie 8 selon au moins une première consigne de vitesse de rotation et une deuxième consigne de vitesse de rotation, de sorte que le déplacement du premier ouvrant 3a par rapport au cadre dormant 4 est mis en oeuvre soit à une première vitesse soit à une deuxième vitesse, différente de la première vitesse.
- Ici, le moteur électrique 7 est de type sans balais à commutation électronique, appelé également « BLDC » (acronyme du terme anglo-saxon BrushLess Direct Current) ou « synchrone à aimants permanents ».
- Préférentiellement, l'actionneur électromécanique 6 est de type réversible.
- Ici, l'actionneur électromécanique 6 est contrôlé par une unité électronique de contrôle 10 appartenant au dispositif d'entraînement motorisé 5. Une telle unité électronique de contrôle 10 permet de déterminer la position du premier ouvrant 3a par rapport au cadre dormant 4, ainsi que de déclencher des mouvements du premier ouvrant 3a par rapport au cadre dormant 4 au moyen de l'actionneur électromécanique 6, de manière autonome.
- Préférentiellement, l'unité électronique de contrôle 10 associée à l'actionneur électromécanique 6 est configurée pour détecter un mouvement du premier ouvrant 3a par rapport au cadre dormant 4 mis en oeuvre manuellement et, plus particulièrement, par un élément extérieur à l'actionneur électromécanique 6 agissant sur le premier ouvrant 3a.
- Avantageusement, l'actionneur électromécanique 6 est dépourvu d'un frein, en particulier pour permettre à l'actionneur électromécanique 6 d'être réversible.
- L'actionneur électromécanique 6 est disposé sur une partie fixe par rapport à la fenêtre 2, en particulier par rapport au cadre dormant 4.
- L'actionneur électromécanique 6 peut également comprendre un dispositif de réduction, notamment à engrenages, non représenté.
- L'actionneur électromécanique 6 peut également comprendre un dispositif de détection de fin de course et/ou d'obstacle, non représenté. Ce dispositif de détection peut être mécanique ou électronique.
- Avantageusement, le moteur électrique 7 et, éventuellement, le dispositif de réduction sont disposés à l'intérieur d'un carter 17 de l'actionneur électromécanique 6.
- Ici, l'actionneur électromécanique 6 est de type tubulaire.
- Comme illustré aux
figures 1 à 3 , le dispositif d'entraînement motorisé 5 comprend également un élément flexible 9. L'élément flexible 9 est entraîné en déplacement par l'actionneur électromécanique 6. - L'élément flexible 9 est configuré pour entraîner en déplacement le premier ouvrant 3a par rapport au cadre dormant 4, lorsque l'actionneur électromécanique 6 est activé électriquement.
- Ici, l'élément flexible 9 comprend un premier brin 9a et un deuxième brin 9b.
- L'élément flexible 9 peut être de section circulaire. La section de l'élément flexible n'est pas limitative et peut être différente, en particulier carrée, rectangulaire ou encore ovale.
- En pratique, l'élément flexible 9 est un câble ou un cordon.
- Il peut être réalisé dans une matière synthétique, telle que par exemple du nylon ou du polyéthylène de masse molaire très élevée. Ainsi, l'utilisation d'un élément flexible 9 en matière synthétique permet de minimiser le diamètre de poulies du dispositif d'entraînement motorisé 5.
- La matière de l'élément flexible n'est pas limitative et peut être différente. En particulier, il peut s'agir d'un acier.
- Le dispositif d'entraînement motorisé 5 comprend également un bras d'entraînement 18.
- Le bras d'entraînement 18 est, d'une part, fixé sur le premier ouvrant 3a et, d'autre part, relié à l'élément flexible 9.
- Ainsi, le bras d'entraînement 18 est configuré pour solidariser l'élément flexible 9 au premier ouvrant 3a.
- Ici, le bras d'entraînement 18 est relié à l'élément flexible 9 au moyen d'une navette 45.
- Avantageusement, la navette 45 est fixée sur l'élément flexible 9, en particulier sur le deuxième brin 9b de l'élément flexible 9, au moyen d'éléments de fixation, non représentés.
- En pratique, les éléments de fixation de l'élément flexible 9, en particulier du deuxième brin 9b de l'élément flexible 9, sur la navette 45 peuvent être de type serre-câble.
- Ici, ces éléments de fixation sont des vis, par exemple au nombre de deux, configurées pour être vissées respectivement dans un trou de vissage de la navette 45, de sorte à fixer l'élément flexible 9, en particulier le deuxième brin 9b de l'élément flexible 9, par coincement entre la tête des vis et une surface de la navette 45.
- Ici, le bras d'entraînement 18 est fixé directement sur le premier ouvrant 3a.
- Avantageusement, le bras d'entraînement 18 est relié, d'une part, au cadre 15 du premier ouvrant 3a et, plus particulièrement, au premier montant latéral 15c du cadre 15 du premier ouvrant 3a et, d'autre part, à l'élément flexible 9.
- Préférentiellement, le bras d'entraînement 18 est fixe, donc immobile, par rapport au cadre 15 du premier ouvrant 3a.
- De cette manière, la liaison entre le bras d'entraînement 18 et le cadre 15 du premier ouvrant 3a est simplifiée et permet de minimiser les coûts d'obtention de la fenêtre 2.
- Avantageusement, le bras d'entraînement 18 est disposé en partie supérieure du premier montant latéral 15c du cadre 15 du premier ouvrant 3a.
- Ainsi, le bras d'entraînement 18 est configuré pour s'accrocher à l'élément flexible 9 disposé au-dessus du cadre dormant 4 et, plus particulièrement, disposé à l'intérieur d'une traverse 47.
- Préférentiellement, le bras d'entraînement 18 est fixé sur une face extérieure du premier montant latéral 15c du cadre 15 du premier ouvrant 3a.
- Ainsi, le bras d'entraînement 18 est fixé sur une face du premier montant latéral 15c du cadre 15 du premier ouvrant 3a orientée vers l'extérieur de la fenêtre 2, autrement dit visible par l'utilisateur.
- De cette manière, la fixation du bras d'entraînement 18 sur le premier montant latéral 15c du cadre 15 du premier ouvrant 3a est facilitée par rapport à une fixation du bras d'entraînement 18 sur une zone interne du cadre 15 du premier ouvrant 3a, en particulier située au niveau du rail de coulissement 11a de la traverse supérieure 4a du cadre dormant 4, dans la configuration assemblée de la fenêtre 2.
- Avantageusement, le bras d'entraînement 18 est assemblé avec le premier ouvrant 3a du côté intérieur du cadre 15 du premier ouvrant 3a, dans la configuration assemblée de la fenêtre 2 par rapport au bâtiment.
- Le côté intérieur du cadre 15 du premier ouvrant 3a est orienté vers l'intérieur du bâtiment, dans la configuration assemblée de la fenêtre 2 par rapport au bâtiment.
- Avantageusement, l'élément flexible 9 est relié au bras d'entraînement 18, quel que soit l'état des éléments de verrouillage du système de ferrure, c'est-à-dire aussi bien dans l'état verrouillé que dans l'état déverrouillé du premier ouvrant 3a par rapport au cadre dormant 4.
- Ainsi, l'élément flexible 9 est relié au bras d'entraînement 18 de manière permanente, dans la configuration assemblée du dispositif d'entraînement motorisé 5 sur la fenêtre 2.
- De cette manière, la liaison entre l'élément flexible 9 et le bras d'entraînement 18 est simplifiée et permet de minimiser les coûts d'obtention de la fenêtre 2.
- En pratique, le bras d'entraînement 18 est fixé sur le premier montant latéral 15c du cadre 15 du premier ouvrant 3a, configuré pour coopérer avec le premier montant latéral 4c du cadre dormant 4, lors de l'atteinte de la position de fermeture du premier ouvrant 3a par rapport au cadre dormant 4.
- En pratique, le bras d'entraînement 18 est fixé sur le premier montant latéral 15c du cadre 15 du premier ouvrant 3a au moyen d'éléments de fixation, non représentés, en particulier démontables au moyen d'un outil.
- Ici, les éléments de fixation du bras d'entraînement 18 sur le premier ouvrant 3a sont des éléments de fixation par vissage.
- Le type d'éléments de fixation du bras d'entraînement sur le premier ouvrant n'est pas limitatif et peut être différent. Il peut s'agir, en particulier, d'éléments de fixation par encliquetage élastique.
- Avantageusement, le bras d'entraînement 18 est fixé sur le cadre 15 du premier ouvrant 3a, suite à l'installation du premier ouvrant 3a à l'intérieur du cadre dormant 4 et, dans le cas présent, également du deuxième ouvrant 3b à l'intérieur du cadre dormant 4, installation au cours de laquelle sont mis en oeuvre les réglages du système de ferrure et des éléments de coulissement.
- Ainsi, les réglages du système de ferrure et des éléments de coulissement peuvent être mis en oeuvre manuellement et classiquement, comme pour une fenêtre dépourvue du dispositif d'entraînement motorisé 5.
- Préférentiellement, le bras d'entraînement 18 est fixé sur le cadre 15 du premier ouvrant 3a, suite au raccordement électrique de l'actionneur électromécanique 6, soit à un réseau d'alimentation électrique du secteur, soit à une batterie.
- En variante, non représentée, la fenêtre 2 comprend un élément d'habillage. L'élément d'habillage est configuré pour recouvrir au moins le bras d'entraînement 18.
- Dans un exemple de réalisation, l'élément d'habillage est configuré pour recouvrir uniquement le bras d'entraînement 18.
- Dans un autre exemple de réalisation, l'élément d'habillage est configuré pour recouvrir le bras d'entraînement 18 ainsi qu'une partie ou la totalité du premier montant latéral 15c du cadre 15 du premier ouvrant 3a, en particulier suivant la hauteur du cadre 15, dans la configuration assemblée de la fenêtre 2 par rapport au bâtiment.
- En pratique, l'élément d'habillage est fixé par rapport au premier ouvrant 3a au moyen d'éléments de fixation, suite à l'assemblage du bras d'entraînement 18 sur le cadre 15 du premier ouvrant 3a.
- Avantageusement, les éléments de fixation de l'élément d'habillage sont configurés pour coopérer avec le bras d'entraînement 18 et/ou avec le premier montant latéral 15c du cadre 15 du premier ouvrant 3a.
- Les éléments de fixation de l'élément d'habillage par rapport au premier ouvrant 3a peuvent être, notamment, des éléments de fixation par encliquetage élastique ou par vissage.
- Préférentiellement, la traverse 47 comprend une glissière 36. En outre, la navette 45 est configurée pour coulisser à l'intérieur de la glissière 36 de la traverse 47.
- Ainsi, les déplacements de la navette 45, lors de l'entraînement de l'élément flexible 9, sont guidés à l'intérieur de la glissière 36 de la traverse 47.
- Dans l'exemple de réalisation illustré aux
figures 1 à 3 , le dispositif d'entraînement motorisé 5 comprend une poulie d'enroulement 19 de l'élément flexible 9. La poulie d'enroulement 19 est entraînée en rotation par l'arbre de sortie 8 de l'actionneur électromécanique 6. - Une première extrémité du premier brin 9a de l'élément flexible 9 est reliée à une première partie de la poulie d'enroulement 19. Une première extrémité du deuxième brin 9b de l'élément flexible 9 est reliée à une deuxième partie de la poulie d'enroulement 19.
- Avantageusement, la première extrémité de chacun des premier et deuxième brins 9a, 9b de l'élément flexible 9 est accrochée respectivement à la première partie ou à la deuxième partie de la poulie d'enroulement 19 au moyen d'éléments de fixation 46.
- Ainsi, la première extrémité de chacun des premier et deuxième brins 9a, 9b de l'élément flexible 9 est respectivement fixée directement à la première partie ou à la deuxième partie de la poulie d'enroulement 19.
- En pratique, les éléments de fixation 46 de l'extrémité de chacun des premier et deuxième brins 9a, 9b de l'élément flexible 9 sont des éléments de type serre-câble.
- Ici, ces éléments de fixation 46 sont des vis, en particulier de type auto-taraudeuses, se vissant dans la poulie d'enroulement 19, de sorte à fixer les premier et deuxième brins 9a, 9b de l'élément flexible 9 par coincement entre la tête des vis et la surface d'enroulement de l'élément flexible 9 de la poulie d'enroulement 19.
- Ici, le sens d'enroulement, respectivement de déroulement, du premier brin 9a de l'élément flexible 9 autour de la première partie de la poulie d'enroulement 19 est opposé au sens d'enroulement, respectivement de déroulement, du deuxième brin 9b de l'élément flexible 9 autour de la deuxième partie de la poulie d'enroulement 19.
- Ainsi, lors du déplacement du premier ouvrant 3a par rapport au cadre dormant 4 selon un premier sens de coulissement, notamment lors du déplacement de la position de fermeture vers une position d'ouverture du premier ouvrant 3a par rapport au cadre dormant 4, le premier brin 9a de l'élément flexible 9 s'enroule autour de la première partie de la poulie d'enroulement 19, alors que le deuxième brin 9b de l'élément flexible 9 se déroule autour de la deuxième partie de la poulie d'enroulement 19.
- En outre, lors du déplacement du premier ouvrant 3a par rapport au cadre dormant 4 selon un deuxième sens de coulissement, notamment lors du déplacement d'une position d'ouverture vers la position de fermeture du premier ouvrant 3a par rapport au cadre dormant 4, le premier brin 9a de l'élément flexible 9 se déroule autour de la première partie de la poulie d'enroulement 19, alors que le deuxième brin 9b de l'élément flexible 9 s'enroule autour de la deuxième partie de la poulie d'enroulement 19.
- Le deuxième sens de coulissement du premier ouvrant 3a par rapport au cadre dormant 4 est opposé au premier sens de coulissement.
- De cette manière, le sens d'entraînement en rotation du premier brin 9a de l'élément flexible 9 autour de la première partie de la poulie d'enroulement 19 est inverse au sens d'entraînement en rotation du deuxième brin 9b de l'élément flexible 9 autour de la deuxième partie de la poulie d'enroulement 19.
- Avantageusement, le sens de coulissement du premier ouvrant 3a par rapport au cadre dormant 4 est déterminé en fonction du sens de rotation de l'arbre de sortie 8 de l'actionneur électromécanique 6. En outre, le sens d'entraînement en rotation de la poulie d'enroulement 19 est déterminé par le sens de rotation de l'arbre de sortie 8 de l'actionneur électromécanique 6.
- Ainsi, le sens d'entraînement en rotation du premier brin 9a et du deuxième brin 9b de l'élément flexible 9 autour des première et deuxième parties de la poulie d'enroulement 19 est fonction du sens de rotation de l'arbre de sortie 8 de l'actionneur électromagnétique 6.
- Ici, le sens d'entraînement en rotation de la poulie d'enroulement 19 est identique au sens de rotation de l'arbre de sortie 8 de l'actionneur électromécanique 6.
- Des moyens de commande de l'actionneur électromécanique 6 permettent de commander le déplacement par coulissement du premier ouvrant 3a par rapport au cadre dormant 4. Ces moyens de commande comprennent au moins l'unité électronique de contrôle 10. L'unité électronique de contrôle 10 est configurée pour mettre en fonctionnement le moteur électrique 7 de l'actionneur électromécanique 6 et, en particulier, permettre l'alimentation en énergie électrique du moteur électrique 7.
- Ainsi, l'unité électronique de contrôle 10 commande, notamment, le moteur électrique 7, de sorte à ouvrir ou fermer par coulissement le premier ouvrant 3a par rapport au cadre dormant 4.
- De cette manière, la fenêtre 2 comprend l'unité électronique de contrôle 10. Plus particulièrement, l'unité électronique de contrôle 10 est intégrée dans le dispositif d'entraînement motorisé 5.
- Avantageusement, le dispositif d'entraînement motorisé 5 est un sous-ensemble pré-assemblé avant montage, dans l'exemple sur la traverse 47, qui comprend au moins l'actionneur électromécanique 6, la poulie d'enroulement 19, l'élément flexible 9 et l'unité électronique de contrôle 10.
- Le dispositif d'entraînement motorisé 5 est commandé par une unité de commande. L'unité de commande peut être, par exemple, une unité de commande locale 12.
- L'unité de commande locale 12 peut être reliée en liaison filaire ou non filaire avec une unité de commande centrale 13. L'unité de commande centrale 13 pilote l'unité de commande locale 12, ainsi que d'autres unités de commande locales similaires et réparties dans le bâtiment.
- L'unité électronique de contrôle 10 comprend également un module de réception d'ordres, en particulier d'ordres radioélectriques émis par un émetteur d'ordres, tel que l'unité de commande locale 12 ou l'unité de commande centrale 13, ces ordres étant destinés à commander le dispositif d'entraînement motorisé 5. Le module de réception d'ordres peut également permettre la réception d'ordres transmis par des moyens filaires.
- L'unité électronique de contrôle 10, l'unité de commande locale 12 et/ou l'unité de commande centrale 13 peuvent être en communication avec un ou plusieurs capteurs configurés pour déterminer, par exemple, une température, une hygrométrie, une vitesse de vent, une mesure d'un paramètre de qualité d'air intérieur ou extérieur ou encore une présence.
- L'unité de commande centrale 13 peut également être en communication avec un serveur 14, de sorte à contrôler l'actionneur électromécanique 6 suivant des données mises à disposition à distance par l'intermédiaire d'un réseau de communication, en particulier un réseau internet pouvant être relié au serveur 14.
- L'unité électronique de contrôle 10 peut être commandée à partir de l'unité de commande locale 12. L'unité de commande locale 12 est pourvue d'un clavier de commande. Le clavier de commande de l'unité de commande locale 12 comprend des éléments de sélection et, éventuellement, des éléments d'affichage.
- A titre d'exemples nullement limitatifs, les éléments de sélection peuvent être des boutons poussoirs ou des touches sensitives, les éléments d'affichage peuvent être des diodes électroluminescentes, un afficheur LCD (acronyme de l'expression anglo-saxonne « Liquid Crystal Display ») ou TFT (acronyme de l'expression anglo-saxon « Thin Film Transistor »). Les éléments de sélection et d'affichage peuvent être également réalisés au moyen d'un écran tactile.
- L'unité de commande locale 12 peut être un point de commande fixe ou nomade. Un point de commande fixe correspond à un boîtier de commande destiné à être fixé sur une façade d'un mur du bâtiment, sur une face du cadre 15 du premier ouvrant 3a de la fenêtre 2 ou encore sur une face du cadre dormant 4 de la fenêtre 2. Un point de commande nomade correspond à une télécommande.
- L'unité de commande locale 12 permet de commander directement l'unité électronique de contrôle 10 en fonction d'une sélection effectuée par l'utilisateur.
- L'unité de commande locale 12 permet à l'utilisateur d'intervenir directement sur l'actionneur électromécanique 6 du dispositif d'entraînement motorisé 5 par l'intermédiaire de l'unité électronique de contrôle 10 associée à ce dispositif d'entraînement motorisé 5, ou d'intervenir indirectement sur l'actionneur électromécanique 6 du dispositif d'entraînement motorisé 5 par l'intermédiaire de l'unité de commande centrale 13.
- Le dispositif d'entraînement motorisé 5, en particulier l'unité électronique de contrôle 10, est, de préférence, configuré pour exécuter des ordres de commande de fermeture par coulissement ainsi que d'ouverture par coulissement du premier ouvrant 3a par rapport au cadre dormant 4, ces ordres de commande pouvant être émis, notamment, par l'unité de commande locale 12 ou par l'unité de commande centrale 13.
- L'unité électronique de contrôle 10 est ainsi apte à mettre en fonctionnement l'actionneur électromécanique 6 du dispositif d'entraînement motorisé 5 et, en particulier, permettre l'alimentation en énergie électrique de l'actionneur électromécanique 6.
- Ici, et tel qu'illustré à la
figure 1 , l'unité électronique de contrôle 10 est disposée à l'intérieur du carter 17 de l'actionneur électromécanique 6. - Les moyens de commande de l'actionneur électromécanique 6 comprennent des moyens matériels et/ou logiciels.
- A titre d'exemple nullement limitatif, les moyens matériels peuvent comprendre au moins un microcontrôleur.
- Avantageusement, l'unité de commande locale 12 comprend un capteur mesurant au moins un paramètre de l'environnement à l'intérieur du bâtiment et intégré à cette unité.
- Ainsi, l'unité de commande locale 12 peut communiquer avec l'unité de commande centrale 13, et l'unité de commande centrale 13 peut commander l'unité électronique de contrôle 10 associée au dispositif d'entraînement motorisé 5 en fonction de données provenant du capteur mesurant le paramètre de l'environnement à l'intérieur du bâtiment.
- Par ailleurs, l'unité de commande locale 12 peut commander directement l'unité électronique de contrôle 10 associée au dispositif d'entraînement motorisé 5 en fonction de données provenant du capteur mesurant le paramètre de l'environnement à l'intérieur du bâtiment.
- A titre d'exemples nullement limitatifs, un paramètre de l'environnement à l'intérieur du bâtiment mesuré par le capteur intégré à l'unité de commande locale 12 est l'humidité, la température, le taux de dioxyde de carbone ou le taux d'un composé organique volatile dans l'air.
- Préférentiellement, l'activation de l'unité de commande locale 12 par l'utilisateur est prioritaire par rapport à l'activation de l'unité de commande centrale 13, de sorte à contrôler la fermeture et l'ouverture par coulissement du premier ouvrant 3a par rapport au cadre dormant 4.
- Ainsi, l'activation de l'unité de commande locale 12 pilote directement l'unité électronique de contrôle 10 associée au dispositif d'entraînement motorisé 5 en fonction d'une sélection effectuée par l'utilisateur, en inhibant éventuellement un ordre de commande pouvant être émis par l'unité de commande centrale 13 ou en ignorant une valeur mesurée par un capteur mesurant au moins un paramètre de l'environnement à l'intérieur du bâtiment ou à l'extérieur du bâtiment, ou un signal de détection de présence à l'intérieur du bâtiment.
- Le dispositif d'entraînement motorisé 5 peut être contrôlé par l'utilisateur, par exemple par la réception d'un ordre de commande correspondant à un appui sur un élément de sélection de l'unité de commande locale 12, telle qu'une télécommande ou un point de commande fixe.
- Le dispositif d'entraînement motorisé 5 peut également être contrôlé automatiquement, par exemple par la réception d'un ordre de commande correspondant à au moins un signal provenant d'au moins un capteur et/ou à un signal provenant d'une horloge. Le capteur et/ou l'horloge peuvent être intégrés à l'unité de commande locale 12 ou à l'unité de commande centrale 13.
- Avantageusement, le dispositif d'entraînement motorisé 5 permet de déplacer automatiquement par coulissement le premier ouvrant 3a par rapport au cadre dormant 4 jusqu'à une position prédéterminée, entre la position fermée et la position d'ouverture maximale. Le déplacement par coulissement du premier ouvrant 3a par rapport au cadre dormant 4 jusqu'à la position prédéterminée, en particulier d'ouverture partielle, est mis en oeuvre suite à la réception d'un ordre de commande émis par l'unité de commande locale 12, l'unité de commande centrale 13 ou un capteur.
- Ici, un mouvement par coulissement du premier ouvrant 3 par rapport au cadre dormant 4 selon la direction de coulissement D est mis en oeuvre en alimentant en énergie électrique l'actionneur électromécanique 6, de sorte à dérouler ou enrouler les premier et deuxième brins 9a, 9b de l'élément flexible 9 autour des première et deuxième parties de la poulie d'enroulement 19.
- Ainsi, le déroulement ou l'enroulement des premier et deuxième brins 9a, 9b de l'élément flexible 9 autour des première et deuxième parties de la poulie d'enroulement 19 est contrôlé par l'alimentation en énergie électrique de l'actionneur électromécanique 6.
- En pratique, l'alimentation en énergie électrique de l'actionneur électromécanique 6 est pilotée par un ordre de commande reçu par l'unité électronique de contrôle 10 provenant de l'unité de commande locale 12, de l'unité de commande centrale 13 ou d'un capteur.
- Ici, le dispositif d'entraînement motorisé 5, en particulier l'actionneur électromécanique 6, est alimenté en énergie électrique à partir d'un réseau d'alimentation électrique. Dans un tel cas, l'actionneur électromécanique 6 comprend un câble d'alimentation électrique, non représenté, permettant son alimentation en énergie électrique depuis le réseau d'alimentation électrique du secteur.
- En variante, le dispositif d'entraînement motorisé 5, en particulier l'actionneur électromécanique 6, est alimenté en énergie électrique au moyen d'une batterie, non représentée. Dans un tel cas, la batterie peut être rechargée, par exemple, par un panneau photovoltaïque ou tout autre système de récupération d'énergie, notamment, de type thermique.
- Ici, la poulie d'enroulement 19 et l'arbre de sortie 8 de l'actionneur électromécanique 6 présentent un même axe de rotation, à savoir l'axe de rotation X. En d'autres termes, l'axe de rotation de la poulie d'enroulement 19 est confondu avec l'axe de rotation de l'arbre de sortie 8 de l'actionneur électromécanique 6.
- Ainsi, la poulie d'enroulement 19 est disposée dans le prolongement de l'arbre de sortie 8 de l'actionneur électromécanique 6 et est entraînée en rotation autour d'un même axe de rotation X que l'arbre de sortie 8 de l'actionneur électromécanique 6.
- Par ailleurs, l'élément flexible 9 forme une boucle, dite ouverte, entre la première extrémité du premier brin 9a, reliée à la première partie de la poulie d'enroulement 19, et la première extrémité du deuxième brin 9b, reliée à la deuxième partie de la poulie d'enroulement 19.
- De cette manière, les premier et deuxième brins 9a, 9b de l'élément flexible 9 sont reliés à la poulie d'enroulement 19 et séparés au niveau des première et deuxième parties de celle-ci.
- Dans l'exemple de réalisation illustré aux
figures 1 à 3 , l'actionneur électromécanique 6 est fixé sur la traverse 47 au moyen d'éléments de fixation 28. - En outre, la poulie d'enroulement 19 est maintenue sur la traverse 47 au moyen de ces mêmes éléments de fixation 28.
- En pratique, les éléments de fixation 28 de l'actionneur électromécanique 6 sur la traverse 47 comprennent des supports, en particulier des équerres de fixation.
- Avantageusement, ces supports sont fixés sur la traverse 47 du cadre dormant 4 par vissage.
- En pratique, chaque support des éléments de fixation 28 comprend au moins un trou 48 de passage d'une vis de fixation. Dans cet exemple de réalisation, chaque support comprend deux trous 48 de passage d'une vis de fixation.
- En outre, chaque vis de fixation traversant l'un des trous de passage 48 est vissée dans un lardon, non représenté, maintenu dans une rainure 49 de la traverse 47, en particulier dans une ouverture de vissage ménagée dans le lardon.
- Ici, les éléments de fixation 28 de l'actionneur électromécanique 6 sur la traverse 47 comprennent deux supports. Un premier de ces supports est assemblé à une première extrémité 6a de l'actionneur électromécanique 6. Un deuxième de ces supports est assemblé à une deuxième extrémité 6b de l'actionneur électromécanique 6. La première extrémité 6a de l'actionneur électromécanique 6 est opposée à la deuxième extrémité 6b de l'actionneur électromécanique 6.
- Avantageusement, chaque support des éléments de fixation 28 comprend au moins un pion, non représenté, configuré pour coopérer avec la rainure 49 ménagée dans la traverse 47. Dans un exemple de réalisation, chaque support comprend deux pions.
- Ainsi, chaque support est orienté et positionné par rapport à la traverse 47.
- Avantageusement, la fixation de l'actionneur électromécanique 6, ainsi que de la poulie d'enroulement 19, sur les supports des éléments de fixation 28 est mise en oeuvre par des pièces de fixation, non représentées, en particulier par vissage.
- En variante, non représentée, les pièces de fixation de l'actionneur électromécanique 6, ainsi que de la poulie d'enroulement 19, sur les supports sont des éléments d'encliquetage élastique.
- Ici et comme illustré aux
figures 1 à 3 , l'élément flexible 9 du dispositif d'entraînement motorisé 5 s'étend le long de la traverse supérieure 4a du cadre dormant 4 et, plus particulièrement, de la traverse 47, à partir de la première partie de la poulie d'enroulement 19 jusqu'à la deuxième partie de la poulie d'enroulement 19. - Ainsi, un tel arrangement de l'élément flexible 9 permet de garantir les déplacements par coulissement du premier ouvrant 3a par rapport au cadre dormant 4, ainsi que l'aspect esthétique de la fenêtre 2.
- Avantageusement, la traverse 47 est fixée sur la traverse supérieure 4a du cadre dormant 4 au moyen d'éléments de fixation, non représentés.
- Dans cet exemple de réalisation, les éléments de fixation de la traverse 47 sur la traverse supérieure 4a du cadre dormant 4 sont des éléments de fixation par vissage.
- Le type des éléments de fixation de la traverse sur la traverse supérieure du cadre dormant ne sont pas limitatifs et peuvent être différents. Il peut s'agir, notamment, d'éléments de fixation par encliquetage élastique.
- En variante, non représentée, l'actionneur électromécanique 6 est fixé sur la traverse supérieure 4a du cadre dormant 4 au moyen des éléments de fixation 28.
- Ici et comme illustré aux
figures 1 à 3 , l'élément flexible 9 s'étend uniquement au niveau de la traverse supérieure 4a du cadre dormant 4, suivant au moins une partie de la longueur V de la traverse 47. - En pratique, le dispositif d'entraînement motorisé 5 comprend au moins deux poulies de renvoi d'angle 35 distantes d'un écartement déterminé suivant la longueur V de la traverse 47.
- Les poulies de renvoi d'angle 35 sont configurées pour guider l'élément flexible 9, par rapport, notamment, à la poulie d'enroulement 19 et au bras d'entraînement 18, en particulier lors d'un déplacement du premier ouvrant 3a par rapport au cadre dormant 4.
- Au moins une première poulie de renvoi d'angle 35 est disposée d'un premier côté de l'actionneur électromécanique 6, c'est-à-dire du côté de la première extrémité 6a de l'actionneur électromécanique 6. Au moins une deuxième poulie de renvoi d'angle 35 est disposée d'un deuxième côté de l'actionneur électromécanique 6, c'est-à-dire du côté de la deuxième extrémité 6b de l'actionneur électromécanique 6.
- Ici, le dispositif d'entraînement motorisé 5 comprend une paire de poulies de renvoi d'angle 35 disposée du premier côté de l'actionneur électromécanique 6 distante de l'écartement déterminé par rapport à une paire de poulies de renvoi d'angle 35 disposée du deuxième côté de l'actionneur électromécanique 6.
- Dans cet exemple de réalisation, les poulies de renvoi d'angle 35 disposées du deuxième côté de l'actionneur électromécanique 6 sont masquées par un premier dispositif de verrouillage 20.
- Le nombre de poulies de renvoi d'angle n'est pas limitatif et peut être différent.
- Chaque poulie de renvoi d'angle 35 peut être réalisée, par exemple, par une poulie folle, autrement dit montée libre en rotation, en particulier sur la traverse supérieure 4a du cadre dormant 4, ou par une poulie fixe, autrement dit solidaire de son axe, en particulier fixée sur la traverse supérieure 4a du cadre dormant 4.
- Chaque poulie de renvoi d'angle 35 peut être une poulie avec une roue à gorge, généralement appelée réa.
- Tel qu'illustré aux
figures 1 à 3 , l'actionneur électromécanique 6 et l'élément flexible 9 sont disposés à l'intérieur de la traverse 47, configurée pour former un coffre et ménagé au-dessus de la fenêtre 2, en particulier s'étendant au moins en partie au-dessus de la traverse supérieure 4a du cadre dormant 4. - Ainsi, l'actionneur électromécanique 6 et l'élément flexible 9 sont dissimulés à l'intérieur de la traverse 47, de sorte à garantir l'aspect esthétique de la fenêtre coulissante 2.
- De même, la poulie d'enroulement 19 est disposée à l'intérieur de la traverse 47 ménagé au-dessus de la fenêtre 2.
- La traverse 47 peut s'étendre partiellement ou totalement devant le cadre dormant 4, dans la configuration assemblée de la fenêtre 2 par rapport au bâtiment. Dans ce cas, la traverse 47 s'étend au moins en partie en saillie par rapport au cadre dormant 4.
- Dans un tel cas, la traverse 47 peut être soit disposée au-dessus de la traverse supérieure 4a du cadre dormant 4 soit disposée en vis-à-vis de la traverse supérieure 4a du cadre dormant 4, c'est-à-dire en proéminence vers l'intérieur du bâtiment, dans la configuration assemblée de la fenêtre 2 par rapport au bâtiment.
- Avantageusement, la traverse 47 comprend un capot, non représenté, configuré pour accéder au dispositif d'entraînement motorisé 5 et, plus particulièrement, à l'actionneur électromécanique 6 et à l'élément flexible 9, ainsi qu'à la poulie d'enroulement 19.
- Ainsi, le capot permet de réaliser une opération de maintenance du dispositif d'entraînement motorisé 5 et/ou une opération de réparation de celui-ci.
- Dans un exemple de réalisation, le capot s'étend suivant la totalité de la longueur V de la traverse 47.
- En variante, le capot s'étend seulement suivant une partie de la longueur V de la traverse 47.
- Avantageusement, le seul ouvrant 3a, parmi les premier et deuxième ouvrants 3a, 3b, pouvant être entraîné en coulissement par le dispositif d'entraînement motorisé 5 est un ouvrant intérieur de la fenêtre 2. L'ouvrant intérieur 3a est disposé du côté intérieur par rapport au bâtiment, dans la configuration assemblée de la fenêtre 2 dans le bâtiment.
- Ainsi, l'élément flexible 9 permettant l'entraînement par coulissement du premier ouvrant 3a par rapport au cadre dormant 4 est maintenu inaccessible à partir de l'extérieur du bâtiment et, plus particulièrement, de la fenêtre 2, lorsque le premier ouvrant 3a est dans la position fermée, telle que montrée à la
figure 1 , ou une position de ventilation sécurisée, telle que montrée à lafigure 2 , par rapport au cadre dormant 4. - La position de ventilation sécurisée, autrement dit une position entrebâillée verrouillée, est une position du premier ouvrant 3a par rapport au cadre dormant 4 dans laquelle le premier ouvrant 3a est entrebâillé par rapport au cadre dormant 4 et maintenu verrouillé par le premier dispositif de verrouillage 20. La position entrebâillée verrouillée est disposée entre la position ouverte et la position fermée du premier ouvrant 3a par rapport au cadre dormant 4.
- La position entrebâillée verrouillée est une position partiellement ouverte du premier ouvrant 3a par rapport au cadre dormant 4, pour laquelle le cadre 15 du premier ouvrant 3a est écarté du cadre dormant 4 d'une distance prédéterminée, en particulier de l'ordre de quelques centimètres.
- En outre, dans le cas où le deuxième ouvrant 3b est mobile manuellement, celui-ci peut être déplacé par l'utilisateur indépendamment du premier ouvrant 3a, notamment en cas d'absence d'alimentation en énergie électrique du dispositif d'entraînement motorisé 5 ou de panne du dispositif d'entraînement motorisé 5.
- Le dispositif d'entraînement motorisé 5 permet de faire coulisser automatiquement le premier ouvrant 3a par rapport au cadre dormant 4 selon la direction de coulissement D, en enroulant, respectivement en déroulant, le premier brin 9a de l'élément flexible 9 autour de la première partie de la poulie d'enroulement 19 et en déroulant, respectivement en enroulant, le deuxième brin 9b de l'élément flexible 9 autour de la deuxième partie de la poulie d'enroulement 19.
- Le dispositif d'entraînement motorisé 5 permet ainsi de fermer et d'ouvrir de manière motorisée le premier ouvrant 3a par rapport au cadre dormant 4, par coulissement selon la direction de coulissement D.
- Avantageusement, en cas de panne du dispositif d'entraînement motorisé 5 ou d'une coupure d'alimentation électrique du dispositif d'entraînement motorisé 5, un coulissement manuel, en particulier par l'utilisateur, du premier ouvrant 3a par rapport au cadre dormant 4 selon la direction de coulissement D peut être mis en oeuvre, puisque l'actionneur électromécanique 6 est réversible ou encore suite à la désolidarisation de l'élément flexible 9 par rapport au premier ouvrant 3a ou suite à la désolidarisation du bras d'entraînement 18 par rapport au premier ouvrant 3a.
- Par ailleurs, l'utilisation de l'élément flexible 9 pour déplacer le premier ouvrant 3a par rapport au cadre dormant 4 permet de minimiser les coûts d'obtention du dispositif d'entraînement motorisé 5, ainsi que de minimiser l'encombrement du dispositif d'entraînement motorisé 5, en particulier par rapport à une courroie.
- Comme indiqué en pointillés sur la
figure 1 , la fenêtre 2 comprend également un deuxième dispositif de verrouillage 21 pour verrouiller le premier ouvrant 3a par rapport au cadre dormant 4 dans la position fermée et ainsi le passer dans la position fermée verrouillée. - En outre, la fenêtre 2 comprend un dispositif de commande 22 pour commander le deuxième dispositif de verrouillage 21, comme illustré à la
figure 1 . Le dispositif de commande 22 est configuré, d'une part, pour coopérer avec le deuxième dispositif de verrouillage 21 et, d'autre part, pour être actionné au moyen de l'élément flexible 9 et, plus particulièrement au moyen de la navette 45, lorsque l'actionneur électromécanique 6 est activé électriquement. - Avantageusement, le deuxième dispositif de verrouillage 21 fait partie du système de ferrure, évoqué précédemment, de la fenêtre 2.
- Préférentiellement, le bras d'entraînement 18 supporte le dispositif de commande 22.
- Ainsi, le bras d'entraînement 18 et le dispositif de commande 22 forment un ensemble mécanique solidaire.
- Comme montré sur la
figure 4 , le dispositif de commande 22 comprend avantageusement un élément d'entraînement 30. Cet élément d'entraînement 30 est, d'une part, relié à la navette 45 et, d'autre part, monté en rotation par rapport au bras d'entraînement 18. - Ainsi, l'élément d'entraînement 30 présente un débattement par rapport au bras d'entraînement 18 et, plus particulièrement, par rapport à un carter 38 du bras d'entraînement 18.
- En variante, non représentée, le dispositif de commande 22 comprend une pluralité d'éléments d'entraînement 30. Chacun des éléments d'entraînement 30 est configuré pour être relié à la navette 45.
- Los de la mise en service de la fenêtre 2, l'un des éléments d'entraînement 30 est relié à la navette 45, en fonction du positionnement du premier dispositif de verrouillage 20 par rapport à la traverse 47, suivant la direction de coulissement D.
- Avantageusement, le coffre, formé par la traverse 47 et son capot, comprend une fente 24 configurée pour permettre le passage d'une partie supérieure du bras d'entraînement 18, lors d'un déplacement du bras d'entraînement 18 par rapport au cadre dormant 4 selon la direction de coulissement D, comme illustré à la
figure 4 . - Ainsi, le bras d'entraînement 18 peut être entraîné en déplacement par rapport au coffre, dans la configuration assemblée de la fenêtre 2, tout en étant relié à l'élément d'entraînement 30 du dispositif de commande 22.
- De cette manière, la partie supérieure du bras d'entraînement 18 est configurée pour se déplacer à l'intérieur de la fente 24 ménagée dans le coffre.
- Par ailleurs, une partie inférieure du bras d'entraînement 18 est disposée à l'extérieur du coffre.
- Préférentiellement, le bras d'entraînement 18 et le deuxième dispositif de verrouillage 21 sont disposés en partie supérieure du premier montant latéral 15c du cadre 15 du premier ouvrant 3a, dans la configuration assemblée de la fenêtre 2 par rapport au bâtiment.
- Ainsi, le bras d'entraînement 18 et le deuxième dispositif de verrouillage 21 sont disposés au plus proche de l'élément flexible 9, puisque l'élément flexible 9 s'étend à l'intérieur de la traverse 47.
- Préférentiellement, le deuxième dispositif de verrouillage 21 est disposé à l'intérieur du premier montant latéral 15c du cadre 15 du premier ouvrant 3a.
- Avantageusement, le deuxième dispositif de verrouillage 21 comprend au moins un boîtier, un arbre, communément appelé carré, une cloche d'entraînement et un pêne, non représentés. La cloche d'entraînement comprend un logement. Une première extrémité de l'arbre est disposée à l'intérieur du logement de la cloche d'entraînement. Le pêne est configuré pour coopérer avec un trou ménagé dans la tringle de la crémone.
- Ici, lors de l'entraînement en rotation de l'arbre du deuxième dispositif de verrouillage 21 par le dispositif de commande 22, que ce soit pour le verrouillage du premier ouvrant 3a par rapport au cadre dormant 4 ou pour le déverrouillage du premier ouvrant 3a par rapport au cadre dormant 4, la cloche d'entraînement est entraînée en rotation à l'intérieur du boîtier du deuxième dispositif de verrouillage 21, puis le pêne du deuxième dispositif de verrouillage 21 est entraîné en translation, de sorte à déplacer la tringle de la crémone le long du montant latéral 15c du cadre 15 du premier ouvrant 3a, en particulier suivant une direction verticale, dans la configuration assemblée de la fenêtre 2 par rapport au bâtiment.
- Avantageusement, le dispositif de commande 22 comprend un mécanisme d'actionnement du deuxième dispositif de verrouillage 21 configuré pour entraîner en rotation l'arbre du deuxième dispositif de verrouillage 21, lors de l'entraînement de l'élément flexible 9 par l'actionneur électromécanique 6.
- Ainsi, le mécanisme d'actionnement du dispositif de commande 22 est configuré pour transformer le mouvement de translation de l'élément flexible 9 appliqué au bras d'entraînement 18 par l'intermédiaire de la navette 45, en particulier par l'élément d'entraînement, lors de l'activation électrique de l'actionneur électromécanique 6, en un mouvement de rotation de l'arbre du deuxième dispositif de verrouillage 21, lors du verrouillage ou du déverrouillage du premier ouvrant 3a par rapport au cadre dormant 4.
- Avantageusement, le mécanisme d'actionnement du dispositif de commande 22 peut être mis en oeuvre au moyen d'un ou plusieurs bras de leviers et/ou par un ou plusieurs pignons.
- On décrit à présent, en référence aux
figures 4 à 12 , plus en détail l'arrangement entre le dispositif d'entraînement motorisé 5 et le premier dispositif de verrouillage 20 de la fenêtre coulissante 2, selon un mode de réalisation. - Le premier dispositif de verrouillage 20 comprend un bras mobile 23 autour d'un premier axe de rotation Y1.
- Avantageusement, le bras mobile 23 est configuré pour se déplacer par rapport à une partie fixe de la fenêtre 2 autour du premier axe de rotation Y1.
- Ici, le bras mobile 23 est configuré pour se déplacer par rapport à la traverse 47 autour du premier axe de rotation Y1.
- Dans cet exemple de réalisation, le bras mobile 23 est assemblé sur la traverse 47 au moyen d'un élément d'assemblage 25.
- Ici, l'élément d'assemblage 25 comprend une ouverture 26 à l'intérieur de laquelle est disposé un arbre de rotation 27, de sorte à permettre un mouvement de rotation du bras mobile 23 autour du premier axe de rotation Y1.
- Ainsi, le bras mobile 23 est monté en rotation par rapport à l'élément d'assemblage 25 autour du premier axe de rotation Y1, au moyen d'une liaison pivot.
- Avantageusement, l'élément d'assemblage 25 est fixé sur la traverse 47 au moyen d'éléments de fixation, non représentés.
- Ici, l'élément d'assemblage 25 est configuré pour fixer le premier dispositif de verrouillage 20 sur une partie fixe de la fenêtre 2, en particulier la traverse 47.
- Ici, les éléments de fixation de l'élément d'assemblage 25 sur la traverse 47 comprennent des éléments de positionnement à l'intérieur de la rainure 49 de la traverse 47, tels que, par exemple, des pions de guidage, ainsi que des vis de fixation. Chaque vis de fixation est configurée pour traverser un trou de passage ménagé dans la traverse 47 et pour se visser dans un trou de fixation de l'élément d'assemblage 25.
- Le type d'éléments de fixation de l'élément d'assemblage sur la traverse n'est pas limitatif et peut être différent. Il peut s'agir, notamment, d'éléments de fixation par encliquetage élastique.
- Dans cet exemple de réalisation, le premier dispositif de verrouillage 20 est en appui sur la traverse 47. Et, plus particulièrement, une paroi de l'élément d'assemblage 25 du premier dispositif de verrouillage 20 est en appui sur une paroi de la traverse 47.
- Ici, l'élément d'assemblage 25 du premier dispositif de verrouillage 20 est réalisé sous la forme d'un étrier.
- Avantageusement, le premier dispositif de verrouillage 20 comprend un premier élément de rappel élastique, non représenté, disposé entre le bras mobile 23 et l'élément d'assemblage 25.
- Ainsi, le premier élément de rappel élastique permet de garantir le maintien dans une position de repos du bras mobile 23 par rapport à l'élément d'assemblage 25 et, plus particulièrement, par rapport à la traverse 47.
- Ici, le premier élément de rappel élastique est un ressort, en particulier de type à épingle.
- Le type d'élément de rappel élastique entre le bras mobile et l'élément d'assemblage n'est pas limitatif et peut être différent. Il peut s'agir, notamment, d'un ressort de torsion, par exemple à spirales.
- Avantageusement, le premier élément de rappel élastique est situé sur le même axe de rotation Y1 que celui du bras mobile 23.
- Dans un tel cas, le bras mobile 23 est en appui contre une butée, non représentée, de l'élément d'assemblage 25.
- En variante, non représentée, le bras mobile 23 est configuré pour se déplacer par rapport au cadre dormant 4 autour du premier axe de rotation Y1 et, plus particulièrement, par rapport à la traverse supérieure 4a du cadre dormant 4.
- Le bras d'entraînement 18 est configuré pour coopérer avec le bras mobile 23 du premier dispositif de verrouillage 20.
- Ici, la navette 45 est également configurée pour coopérer avec le bras mobile 23 du premier dispositif de verrouillage 20.
- Le bras mobile 23 est configuré pour maintenir le bras d'entraînement 18 et, plus particulièrement le carter 38 du bras d'entraînement 18, entre la position entrebâillée verrouillée et la position fermée du premier ouvrant 3a par rapport au cadre dormant 4, suite au franchissement de la position entrebâillée verrouillée, lors d'un déplacement du premier ouvrant 3a par rapport au cadre dormant 4 à partir d'une position ouverte vers la position fermée.
- Le premier dispositif de verrouillage 20 comprend un dispositif de libération 29 du bras mobile 23 par rapport au bras d'entraînement 18.
- Le dispositif de libération 29 est configuré pour être activé, suite au verrouillage du premier ouvrant 3a par rapport au cadre dormant 4 dans la position fermée, au moyen du deuxième dispositif de verrouillage 21.
- Ainsi, le premier dispositif de verrouillage 20 permet de verrouiller le premier ouvrant 3a par rapport au cadre dormant 4 dans la position entrebâillée verrouillée, au moyen du dispositif d'entraînement motorisé 5.
- De cette manière, le premier dispositif de verrouillage 20 permet de garantir la ventilation du bâtiment de manière sécurisée par un entrebâillement du premier ouvrant 3a par rapport au cadre dormant 4, en particulier au moyen de pièces simples.
- En outre, le déverrouillage du premier ouvrant 3a par rapport au cadre dormant 4 en lien avec le premier dispositif de verrouillage 20 est mis en oeuvre au moyen du dispositif d'entraînement motorisé 5 configuré pour générer un déplacement du premier ouvrant 3a par rapport au cadre dormant 4 passant par la position fermée et verrouillée du premier ouvrant 3a par rapport au cadre dormant 4, au moyen du deuxième dispositif de verrouillage 21.
- De cette manière, le déverrouillage du premier ouvrant 3a par rapport au cadre dormant 4 est mis en oeuvre uniquement au moyen du dispositif d'entraînement motorisé 5.
- Par ailleurs, l'unité électronique de contrôle 10 du dispositif d'entraînement motorisé 5 permet de commander le déplacement du premier ouvrant 3a par rapport au cadre dormant 4 pour verrouiller le premier ouvrant 3a par rapport au cadre dormant 4 dans la position entrebâillée verrouillée et pour déverrouiller le premier ouvrant 3a par rapport au cadre dormant 4 de la position entrebâillée verrouillée.
- De cette manière, l'atteinte de la position entrebâillée verrouillée par le dispositif d'entraînement motorisé 5 est mise en oeuvre de manière répétable, tout en garantissant une butée franche du premier ouvrant 3a par rapport au cadre dormant 4 par l'intermédiaire du premier dispositif de verrouillage 20.
- Le premier dispositif de verrouillage 20 permet ainsi d'interdire, ou tout au moins retarder, une tentative d'intrusion d'un individu.
- Avantageusement, le dispositif de libération 29 est configuré pour être activé au moyen du bras d'entraînement 18 et, plus particulièrement, de la navette 45, notamment une rampe 40 de la navette 45, lors d'un déplacement du premier ouvrant 3a par rapport au cadre dormant 4 à partir de la position fermée et, plus particulièrement, la position fermée verrouillée vers une position ouverte du premier ouvrant 3a par rapport au cadre dormant 4.
- Ainsi, l'activation du dispositif de libération 29, en particulier par la navette 45, lors d'un déplacement du premier ouvrant 3a par rapport au cadre dormant 4 à partir de la position fermée vers une position ouverte du premier ouvrant 3a par rapport au cadre dormant 4, permet de libérer le bras d'entraînement 18 par rapport au bras mobile 23 du premier dispositif de verrouillage 20.
- De cette manière, le bras d'entraînement 18 est déverrouillé par rapport au bras mobile 23 du premier dispositif de verrouillage 20 et le premier ouvrant 3a peut être déplacé par rapport au cadre dormant 4 au-delà de la position entrebâillée verrouillée, suivant le sens de déplacement du premier ouvrant 3a par rapport au cadre dormant 4 à partir de la position fermée vers une position ouverte.
- Avantageusement, le bras mobile 23 comprend une butée 31. Cette butée 31 du bras mobile 23 est configurée pour limiter la course du bras d'entraînement 18, suite au franchissement de cette butée 31 correspondant à une position entrebâillée verrouillée maximale, lors d'un déplacement du premier ouvrant 3a par rapport au cadre dormant 4 à partir d'une position ouverte vers la position fermée.
- Ainsi, la butée 31 du bras mobile 23 permet de garantir le maintien en position du premier ouvrant 3a par rapport au cadre dormant 4 dans la position entrebâillée verrouillée.
- De cette manière, la butée 31 du bras mobile 23 permet de bloquer le bras d'entraînement 18 et donc de garantir un verrouillage dans la position entrebâillée verrouillée, où la mise en appui du bras d'entraînement 18 contre la butée 31 du bras mobile 23 correspond à l'entrebâillement maximal du premier ouvrant 3a par rapport au cadre dormant 4.
- Préférentiellement, le bras d'entraînement 18, en particulier une paroi 18a du bras d'entraînement 18, est configuré pour coopérer avec une extrémité libre 23a du bras mobile 23, lors d'un déplacement du premier ouvrant 3a par rapport au cadre dormant 4, dans le sens de déplacement à partir d'une position ouverte vers la position fermée du premier ouvrant 3a par rapport au cadre dormant 4.
- Ainsi, le bras d'entraînement 18 permet de garantir le maintien en contact avec l'extrémité libre 23a du bras mobile 23, lors d'un déplacement du premier ouvrant 3a par rapport au cadre dormant 4, dans le sens de déplacement à partir d'une position ouverte vers la position fermée du premier ouvrant 3a par rapport au cadre dormant 4.
- Ici, l'extrémité libre 23a du bras mobile 23 est la partie du bras mobile 23 comprenant la butée 31.
- Préférentiellement, le bras mobile 23 comprend une rampe 39 configurée pour coopérer avec le bras d'entraînement 18 et, plus particulièrement, avec la paroi 18a du bras d'entraînement 18, autrement dit avec le carter 38 du bras d'entraînement 18.
- Avantageusement, le dispositif de libération 29 comprend une came 32 mobile autour d'un deuxième axe de rotation Y2. En outre, la came 32 est configurée pour être déplacée par rapport au bras mobile 23.
- Dans cet exemple de réalisation, la came 32 est assemblée sur le bras mobile 23.
- Ici, le bras mobile 23 comprend une ouverture, non représentée, à l'intérieur de laquelle est disposé un arbre de rotation 33, de sorte à permettre un mouvement de rotation de la came 32 autour du deuxième de rotation Y2.
- Ainsi, la came 32 est montée en rotation par rapport au bras mobile 23 au moyen d'une liaison pivot.
- Avantageusement, le premier dispositif de verrouillage 20 comprend un deuxième élément de rappel élastique 34 disposé entre le bras mobile 23 et la came 32.
- Ainsi, le deuxième élément de rappel élastique 34 permet de garantir le maintien dans une position de repos de la came 32 par rapport au bras mobile 23.
- Ici, le deuxième élément de rappel élastique 34 est un ressort, en particulier de type à épingle.
- Le type d'élément de rappel élastique entre le bras mobile et la came n'est pas limitatif et peut être différent. Il peut s'agir, notamment, d'un ressort de torsion, par exemple à spirales.
- Avantageusement, le deuxième élément de rappel élastique 34 est situé sur le même axe de rotation Y2 que celui de la came 32.
- Dans un tel cas, la came 32 est en appui contre une butée d'appui, non représentée, du bras mobile 23.
- Préférentiellement, la rampe 40 de la navette 45 est configurée pour coopérer avec la came 32, lors d'un déplacement du premier ouvrant 3a par rapport au cadre dormant 4, aussi bien dans le sens de déplacement à partir d'une position ouverte vers la position fermée du premier ouvrant 3a par rapport au cadre dormant 4 que dans le sens de déplacement à partir de la position fermée vers une position ouverte du premier ouvrant 3a par rapport au cadre dormant 4.
- Ainsi, la rampe 40 de la navette 45 permet de garantir le maintien en contact avec la came 32 du dispositif de libération 29, lors d'un déplacement du premier ouvrant 3a par rapport au cadre dormant 4, quel que soit le sens de déplacement du premier ouvrant 3a par rapport au cadre dormant 4.
- Ici, la rampe 40 est intégrée à la navette 45.
- En outre, la rampe 40 de la navette 45 permet d'éviter la mise en contact du bras d'entraînement 18 avec le bras mobile 23 du premier dispositif déverrouillage 20, lors du déverrouillage du premier dispositif de verrouillage 20.
- Suite au verrouillage du premier ouvrant 3a par rapport au cadre dormant 4 dans la position fermée au moyen du deuxième dispositif de verrouillage 21, puis lors d'un déplacement du premier ouvrant 3a par rapport au cadre dormant 4 suivant le sens de déplacement à partir de la position fermée vers une position ouverte du premier ouvrant 3a par rapport au cadre dormant 4, la navette 45, en particulier la rampe 40 de la navette 45, est mise en contact avec la came 32.
- Ainsi, le déplacement de la navette 45 au moyen du dispositif d'entraînement motorisé 5 permet de repousser le bras mobile 23, à l'encontre de la force exercée par le deuxième élément de rappel élastique 34, de sorte à dégager la butée 31 du bras mobile 23 par rapport au bras d'entraînement 18.
- De cette manière, le premier dispositif de verrouillage 20 est déverrouillé et le premier ouvrant 3a peut être déplacé par rapport au cadre dormant 4 vers une position ouverte située au-delà de la position entrebâillée verrouillée, au moyen du dispositif d'entraînement motorisé 5.
- Avantageusement, lorsque le premier ouvrant 3a est dans la position fermée non verrouillée par rapport au cadre dormant 4, le dispositif de libération 29 et, plus particulièrement, la came 32 du dispositif de libération 29 est en contact avec la navette 45 et, plus particulièrement, avec la rampe 40 de la navette 45.
- Avantageusement, lors du passage de la position fermée non verrouillée du premier ouvrant 3a par rapport au cadre dormant 4 à la position fermée verrouillée du premier ouvrant 3a par rapport au cadre dormant 4, au moyen du deuxième dispositif de verrouillage 21, le dispositif d'entraînement motorisé 5 entraîne le premier ouvrant 3a par rapport au cadre dormant 4 suivant un mouvement de translation, tel qu'illustré par une flèche F2, selon la direction de coulissement D, notamment sur la
figure 12 . - Ainsi, à la fin du déplacement du premier ouvrant 3a par rapport au cadre dormant 4, mis en oeuvre par le dispositif d'entraînement motorisé 5, le premier ouvrant 3a est dans la position fermée verrouillée par rapport au cadre dormant 4.
- Avantageusement, lorsque le premier ouvrant 3a est dans la position fermée verrouillée par rapport au cadre dormant 4, le dispositif de libération 29 et, plus particulièrement, la came 32 du dispositif de libération 29 n'est plus en contact avec la navette 45 et, plus particulièrement, avec la rampe 40 de la navette 45, comme illustré à la
figure 5 . - Ainsi, lors de l'atteinte de la position fermée verrouillée du premier ouvrant 3a par rapport au cadre dormant 4, le dispositif de libération 29 est activé, autrement dit ramené dans une position de repos, en particulier au moyen du deuxième élément de rappel élastique 34.
- En outre, le verrouillage du premier ouvrant 3a par rapport au cadre dormant 4 en position fermée, au moyen du deuxième dispositif de verrouillage 21, est mis en oeuvre, en particulier, au moyen de l'élément flexible 9, de la navette 45 et du dispositif de commande 22, comme décrit précédemment.
- Dans un deuxième mode de réalisation, représenté à la
figure 13 , les éléments analogues à ceux du premier mode de réalisation portent les mêmes références et fonctionnent comme expliqué ci-dessus. Dans ce qui suit, on décrit, principalement, que ce qui distingue ce mode de réalisation du précédent. Dans ce qui suit, lorsqu'un signe de référence est utilisé sans être reproduit sur lafigure 13 , il correspond à l'objet portant la même référence sur l'une desfigures 1 à 12 . - On décrit maintenant, en particulier, en référence à la
figure 13 , le premier dispositif déverrouillage 20, selon le deuxième mode de réalisation. - Avantageusement, le premier dispositif de verrouillage 20 comprend également un dispositif de réglage 50 en position du dispositif de libération 29 par rapport au bras mobile 23.
- Ainsi, le dispositif de réglage 50 permet de compenser des incertitudes de positionnement du premier dispositif de verrouillage 20 par rapport à la traverse 47 et au cadre dormant 4.
- De cette manière, le dispositif de réglage 50 permet de prendre en considération des dispersions de côtes et de positionnement du premier dispositif de verrouillage 20 et, plus particulièrement, du bras mobile 23 et du dispositif de libération 29 par rapport à la navette 45 et au cadre dormant 4.
- Ici, le dispositif de libération 29 comprend la came 32, mobile autour d'un deuxième axe de rotation Y2', non représenté, et le deuxième élément de rappel élastique 34, de manière similaire au premier mode de réalisation.
- En outre, le dispositif de réglage 50 permet de régler la longueur de contact entre le dispositif de libération 29 et, plus particulièrement, la came 32 et la navette 45.
- Avantageusement, le dispositif de réglage 50 comprend une platine 51. La platine 51 est réglable en position par rapport au bras mobile 23, selon une direction de déplacement, en particulier selon la direction de coulissement D.
- En outre, dans cet exemple de réalisation, la came 32 est assemblée sur la platine 51.
- Ainsi, le dispositif de réglage 50 du premier dispositif de verrouillage 20 permet de régler la position du dispositif de libération 29 et, plus particulièrement, de la came 32 par rapport au bras mobile 23, suivant un mouvement de translation.
- Ici, la platine 51 comprend une ouverture, non représentée, à l'intérieur de laquelle est disposé l'arbre de rotation 33, de sorte à permettre un mouvement de rotation de la came 32 autour du deuxième de rotation Y2'.
- Ainsi, la came 32 est montée en rotation par rapport à la platine 51 et, plus particulièrement, par rapport au bras mobile 23 au moyen d'une liaison pivot.
- Avantageusement, le deuxième élément de rappel élastique 34 est disposé entre la platine 51 et la came 32.
- Ainsi, le deuxième élément de rappel élastique 34 permet de garantir le maintien dans une position de repos de la came 32 par rapport à la platine 51 et, plus particulièrement, par rapport au bras mobile 23.
- Ici, le deuxième élément de rappel élastique 34 est un ressort, en particulier de type à épingle.
- Le type d'élément de rappel élastique entre la platine et la came n'est pas limitatif et peut être différent. Il peut s'agir, notamment, d'un ressort de torsion, par exemple à spirales.
- Avantageusement, le deuxième élément de rappel élastique 34 est situé sur le même axe de rotation Y2' que celui de la came 32.
- Dans un tel cas, la came 32 est en appui contre une butée d'appui, non représentée, de la platine 51.
- Avantageusement, la platine 51 comprend une rainure, non représentée, configurée pour coopérer avec une nervure 53 ménagée dans le bras mobile 23, de sorte à déplacer la platine 51 par rapport au bras mobile 23, suivant un mouvement de translation.
- Ainsi, le dispositif de réglage 50, comprenant au moins la platine 51 et la came 32, peut être déplacé par rapport au bras mobile 23, au moyen d'une liaison glissière.
- Avantageusement, le dispositif de réglage 50 comprend également au moins un élément de fixation 54 de la platine 51 par rapport au bras mobile 23.
- Avantageusement, l'élément de fixation 54 de la platine 51 par rapport au bras mobile 23 est une vis de fixation. L'élément de fixation 54 est configuré pour traverser une ouverture de passage 52 ménagée dans la platine 51 et pour prendre appui contre une paroi du bras mobile 23, en particulier une face de la rainure 53.
- Ainsi, le maintien en position de la platine 51 par rapport au bras mobile 23 est mis en oeuvre en appliquant une pression entre la platine 51 et le bras mobile 23, au moyen de l'élément de fixation 54, qui est ici une vis de pression.
- Avantageusement, l'ouverture de passage 52 de la platine 51 est de forme oblongue.
- En variante, non représentée, le dispositif de réglage 50 est mis en oeuvre par l'intermédiaire du bras mobile 23 qui est télescopique, c'est-à-dire que le bras mobile 23 comprend une première partie et une deuxième partie, les première et deuxième parties du bras mobile 23 étant configurées pour coulisser l'une par rapport à l'autre, en particulier selon la direction de coulissement D.
- En variante, non représentée, le dispositif de réglage 50 est mis en oeuvre par l'intermédiaire de l'élément d'assemblage 25 reliant le bras mobile 23 à la traverse 47, qui peut être déplacé à l'intérieur de la rainure 49 de la traverse 47, en particulier selon la direction de coulissement D, et être maintenu en position par rapport à la traverse 47 au moyen d'un élément de fixation, en particulier une vis de pression prenant appui contre la traverse 47.
- Dans un troisième mode de réalisation, non représenté, les éléments analogues à ceux des premier et deuxième modes de réalisation portent les mêmes références et fonctionnent comme expliqué ci-dessus. Dans ce qui suit, on décrit, principalement, que ce qui distingue ce mode de réalisation des précédents. Dans ce qui suit, lorsqu'un signe de référence est utilisé, il correspond à l'objet portant la même référence sur l'une des
figures 1 à 13 . - On décrit maintenant, en particulier, la navette 45, selon le troisième mode de réalisation.
- Avantageusement, la navette 45 comprend un dispositif de réglage en position de la rampe 40 par rapport à un corps de la navette 45.
- Ainsi, le dispositif de réglage de la rampe 40 par rapport au corps de la navette 45 permet de compenser des incertitudes de positionnement du premier dispositif de verrouillage 20 par rapport à la traverse 47 et au cadre dormant 4.
- De cette manière, le dispositif de réglage de la rampe 40 par rapport au corps de la navette 45 permet de prendre en considération des dispersions de côtes et de positionnement du premier dispositif de verrouillage 20 et, plus particulièrement, du bras mobile 23 et du dispositif de libération 29 par rapport à la navette 45 et au cadre dormant 4.
- En outre, le dispositif de réglage de la rampe 40 par rapport au corps de la navette 45 permet de régler la longueur de contact entre le dispositif de libération 29 et, plus particulièrement, la came 32 et la rampe 40 de la navette 45.
- Avantageusement, le dispositif de réglage en position de la rampe 40 par rapport au corps de la navette 45 comprend une glissière, de sorte à déplacer par coulissement la rampe 40 par rapport au corps de la navette 45, en particulier selon la direction de coulissement D, et au moins un élément de fixation, en particulier une vis de pression, de sorte à maintenir en position la rampe 40 par rapport au corps de la navette 45.
- Dans un quatrième mode de réalisation, non représenté, les éléments analogues à ceux des premier aux troisièmes modes de réalisation portent les mêmes références et fonctionnent comme expliqué ci-dessus. Dans ce qui suit, on décrit, principalement, que ce qui distingue ce mode de réalisation des précédents. Dans ce qui suit, lorsqu'un signe de référence est utilisé, il correspond à l'objet portant la même référence sur l'une des
figures 1 à 13 . - On décrit maintenant, en particulier, le dispositif de commande 22, selon le quatrième mode de réalisation.
- Avantageusement, le dispositif de commande 22 comprend un dispositif de réglage en position de l'élément d'entraînement 30 par rapport au bras d'entraînement 18.
- Ainsi, le dispositif de réglage de l'élément d'entraînement 30 par rapport au bras d'entraînement 18 permet de compenser des incertitudes de positionnement du premier dispositif de verrouillage 20 par rapport à la traverse 47 et au cadre dormant 4.
- De cette manière, le dispositif de réglage de l'élément d'entraînement 30 par rapport au bras d'entraînement 18 permet de prendre en considération des dispersions de côtes et de positionnement du premier dispositif de verrouillage 20 et, plus particulièrement, du bras mobile 23 et du dispositif de libération 29 par rapport à la navette 45 et au cadre dormant 4.
- En outre, le dispositif de réglage de l'élément d'entraînement 30 par rapport au bras d'entraînement 18 permet de régler la longueur de contact entre le dispositif de libération 29 et, plus particulièrement, la came 32 et la navette 45.
- Avantageusement, le dispositif de réglage en position de l'élément d'entraînement 30 par rapport au bras d'entraînement 18 comprend une glissière, de sorte à déplacer par coulissement l'élément d'entraînement 30 par rapport à un élément du dispositif de commande 22, en particulier selon la direction de coulissement D, et au moins un élément de fixation, en particulier une vis de pression, de sorte à maintenir en position l'élément d'entraînement 30 par rapport à l'élément du dispositif de commande 22.
- On décrit à présent, en référence aux
figures 5 à 12 , un procédé de commande en fonctionnement du dispositif d'entraînement motorisé 5 de la fenêtre coulissante 2 pour un bâtiment conforme à l'invention. - Avantageusement, le procédé de commande en fonctionnement du dispositif d'entraînement motorisé 5 comprend une première étape de commande, de sorte à positionner le premier ouvrant 3a par rapport au cadre dormant 4 dans la position entrebâillée verrouillée.
- Ici, la première étape de commande est mise en oeuvre par l'émission d'un ordre de commande à l'unité électronique de contrôle 10 du dispositif d'entraînement motorisé 5, en particulier au moyen de l'une des unités de commande locale 12 ou centrale 13 ou encore d'un capteur.
- La première étape de commande peut ainsi être mise en oeuvre manuellement, en particulier par l'utilisateur, ou automatiquement.
- Avantageusement, suite à la première étape de commande, le procédé comprend une première étape de déplacement du premier ouvrant 3a par rapport au cadre dormant 4 à partir de la position fermée jusqu'à une position ouverte, dans laquelle la navette 45 est positionnée au-delà du premier dispositif de verrouillage 20 suivant la direction de coulissement D du premier ouvrant 3a par rapport au cadre dormant 4.
- Lorsque la navette 45 est positionnée au-delà du premier dispositif de verrouillage 20 suivant la direction de coulissement D du premier ouvrant 3a par rapport au cadre dormant 4, le bras d'entraînement 18, en particulier l'élément d'entraînement 30 du dispositif de commande 22, est également positionné au-delà du premier dispositif de verrouillage 20 suivant la direction de coulissement D du premier ouvrant 3a par rapport au cadre dormant 4.
- Dans cet exemple de réalisation, le sens de déplacement du premier ouvrant 3a par rapport au cadre dormant 4, lors de la première étape de déplacement, est illustré par la flèche F1 aux
figures 5 à 7 . - Ici, la première étape de déplacement du premier ouvrant 3a par rapport au cadre dormant 4 est mise en oeuvre par l'activation électrique de l'actionneur électromécanique 6.
- Lorsque le premier ouvrant 3a est dans la position fermée par rapport au cadre dormant 4, le bras d'entraînement 18 est disposé à l'intérieur d'un évidement 37 du premier dispositif de verrouillage 20, comme illustré à la
figure 5 . - Avantageusement, l'évidement 37 du premier dispositif de verrouillage 20 est défini à une première extrémité par la butée 31 du bras mobile 23 et à une deuxième extrémité par l'élément d'assemblage 25 et, plus particulièrement, par une butée 41 de l'élément d'assemblage 25. La première extrémité de l'évidement 37 est opposée à la deuxième extrémité de celui-ci.
- Au cours du déplacement du premier ouvrant 3a par rapport au cadre dormant 4 à partir de la position fermée jusqu'à la position ouverte, la navette 45, en particulier la rampe 40 de la navette 45, est déplacée au moyen de l'élément flexible 9 et prend appui sur la came 32.
- Lors de ce déplacement du premier ouvrant 3a par rapport au cadre dormant 4 à partir de la position fermée jusqu'à la position ouverte, la came 32 est maintenue en position au moyen de la butée d'appui précitée, entre la came 32 et le bras mobile 23.
- Ainsi, la came 32 est immobile, autour de l'axe de rotation Y2, au cours de ce déplacement du premier ouvrant 3a par rapport au cadre dormant 4 à partir de la position fermée jusqu'à la position ouverte.
- De cette manière, le bras mobile 23 est déplacé par rapport à l'élément d'assemblage 25 et, plus particulièrement, par rapport à la traverse 47 par un mouvement de rotation R1 autour du premier axe de rotation Y1, comme illustré aux
figures 6 et7 . - Ici, le mouvement de rotation R1 du bras mobile 23 par rapport à l'élément d'assemblage 25 est mis en oeuvre contre l'effort du premier élément de rappel élastique disposé au niveau du premier axe de rotation Y1.
- Lorsque la navette 45 est positionnée au-delà du premier dispositif de verrouillage 20 suivant la direction de coulissement D du premier ouvrant 3a par rapport au cadre dormant 4, le bras mobile 23 est déplacé dans sa position de repos par rapport à l'élément d'assemblage 25 et, plus particulièrement, par rapport à la traverse 47 par un mouvement de rotation R3 autour du premier axe de rotation Y1, comme illustré à la
figure 8 . - Suite à la première étape de déplacement, le procédé comprend une deuxième étape de déplacement du premier ouvrant 3a par rapport au cadre dormant 4 à partir de la position ouverte jusqu'à la position entrebâillée verrouillée du premier ouvrant 3a par rapport au cadre dormant 4.
- Ici, la position entrebâillée verrouillée du premier ouvrant 3a par rapport au cadre dormant 4 correspond à la position où le bras d'entraînement 18 est positionné à l'intérieur de l'évidement 37 du premier dispositif de verrouillage 20.
- En outre, une position entrebâillée verrouillée dite maximale du premier ouvrant 3a par rapport au cadre dormant 4 correspond à la mise en appui du bras d'entraînement 18 contre la butée 31 du bras mobile 23, comme illustré à la
figure 10 . - Dans cet exemple de réalisation, le sens de déplacement du premier ouvrant 3a par rapport au cadre dormant 4, lors de la deuxième étape de déplacement, est illustré par la flèche F2 aux
figures 9 à 10 . - Ici, la deuxième étape de déplacement du premier ouvrant 3a par rapport au cadre dormant 4 est mise en oeuvre par l'activation électrique de l'actionneur électromécanique 6.
- Ainsi, la mise en appui du bras d'entraînement 18 contre la butée 31 du bras mobile 23 permet d'empêcher le déplacement du premier ouvrant 3a par rapport au cadre dormant 4 vers une position ouverte du premier ouvrant 3a par rapport au cadre dormant 4.
- Au cours du déplacement du premier ouvrant 3a par rapport au cadre dormant 4 à partir de la position ouverte jusqu'à la position entrebâillée verrouillée du premier ouvrant 3a par rapport au cadre dormant 4, la navette 45 est déplacée au moyen de l'élément flexible 9.
- Lors de ce déplacement du premier ouvrant 3a par rapport au cadre dormant 4 à partir de la position ouverte jusqu'à la position entrebâillée verrouillée du premier ouvrant 3a par rapport au cadre dormant 4, le bras mobile 23, en particulier l'extrémité libre 23a du bras mobile 23, est déplacé par rapport à l'élément d'assemblage 25 et, plus particulièrement, par rapport à la traverse 47, autrement dit par rapport à une partie fixe de la fenêtre 2, dans un premier temps, par un premier mouvement de rotation R1 autour du premier axe de rotation Y1, comme illustré à la
figure 9 , et, dans un deuxième temps, par un deuxième mouvement de rotation R3 autour du premier axe de rotation Y1, comme illustré à lafigure 10 . Le premier mouvement de rotation R1 autour du premier axe de rotation Y1 du bras mobile 23 est opposé au deuxième mouvement de rotation R3 autour du premier axe de rotation Y1 du bras mobile 23. - Ici, le premier mouvement de rotation R1 du bras mobile 23 par rapport à l'élément d'assemblage 25 est mis en oeuvre contre l'effort du premier élément de rappel élastique disposé au niveau du premier axe de rotation Y1. En outre, le deuxième mouvement de rotation R3 autour du premier axe de rotation Y1 du bras mobile 23 par rapport à l'élément d'assemblage 25 est mis en oeuvre par l'effort exercé par le premier élément de rappel élastique disposé au niveau du premier axe de rotation Y1.
- Ainsi, lorsque le bras d'entraînement 18 est positionné à l'intérieur de l'évidement 37 du premier dispositif de verrouillage 20, le bras mobile 23 est déplacé dans sa position de repos par rapport à l'élément d'assemblage 25 et, plus particulièrement, par rapport à la traverse 47 par le deuxième mouvement de rotation R3 autour du premier axe de rotation Y1, comme illustré à la
figure 10 . - En outre, lors de ce déplacement du premier ouvrant 3a par rapport au cadre dormant 4 à partir de la position ouverte jusqu'à la position entrebâillée verrouillée du premier ouvrant 3a par rapport au cadre dormant 4, la came 32 est déplacée par rapport au bras mobile 23 par un mouvement de rotation R2 autour du deuxième axe de rotation Y2, comme illustré à la
figure 9 . - Ainsi, la came 32 est mobile en rotation autour de l'axe de rotation Y2 au cours de ce déplacement du premier ouvrant 3a par rapport au cadre dormant 4 à partir de la position ouverte jusqu'à la position entrebâillée verrouillée du premier ouvrant 3a par rapport au cadre dormant 4.
- Ici, le mouvement de rotation R2 de la came 32 par rapport au bras mobile 23 est mis en oeuvre contre l'effort du deuxième élément de rappel élastique 34 disposé au niveau du deuxième axe de rotation Y2.
- Lorsque le premier ouvrant 3a est dans la position entrebâillée verrouillée par rapport au cadre dormant 4, le bras d'entraînement 18 est bloqué en translation par la butée 31 du bras mobile 23, lors d'un déplacement du premier ouvrant 3a par rapport au cadre dormant 4 mis en oeuvre à partir de la position entrebâillée verrouillée maximale vers une position ouverte.
- Dans un exemple de réalisation, la deuxième étape de déplacement peut comprendre une première sous-étape de déplacement du premier ouvrant 3a par rapport au cadre dormant 4 à partir de la position ouverte jusqu'à une position où le bras d'entraînement 18 est situé à l'intérieur de l'évidement 37 du premier dispositif de verrouillage 20, puis une deuxième sous-étape de déplacement du premier ouvrant 3a par rapport au cadre dormant 4 à partir de la position où le bras d'entraînement 18 est situé à l'intérieur de l'évidement 37 du premier dispositif de verrouillage 20 jusqu'à la position entrebâillée verrouillée maximale du premier ouvrant 3a par rapport au cadre dormant 4.
- Dans cet exemple de réalisation, le sens de déplacement du premier ouvrant 3a par rapport au cadre dormant 4, lors de la première étape additionnelle de déplacement, correspond à celui de la flèche F2. En outre, le sens de déplacement du premier ouvrant 3a par rapport au cadre dormant 4, lors de la deuxième étape additionnelle de déplacement, correspond à celui de la flèche F1.
- En variante, la deuxième étape de déplacement comprend uniquement le déplacement du premier ouvrant 3a par rapport au cadre dormant 4 à partir de la position ouverte jusqu'à la position entrebâillée verrouillée du premier ouvrant 3a par rapport au cadre dormant 4.
- Suite à la deuxième étape de déplacement, le procédé comprend une étape d'arrêt du premier ouvrant 3a par rapport au cadre dormant 4 dans la position entrebâillée verrouillée du premier ouvrant 3a par rapport au cadre dormant 4, comme illustré à la
figure 10 ou à lafigure 11 . - Ici, l'étape d'arrêt du premier ouvrant 3a par rapport au cadre dormant 4 est mise en oeuvre par la désactivation électrique de l'actionneur électromécanique 6.
- Avantageusement, les étapes du procédé de commande décrites précédemment sont mises en oeuvre de manière automatique par le dispositif d'entraînement motorisé 5 et, plus particulièrement, par l'unité électronique de contrôle 10, de sorte à atteindre la position entrebâillée verrouillée du premier ouvrant 3a par rapport au cadre dormant 4.
- Avantageusement, suite à l'atteinte de la position entrebâillée verrouillée du premier ouvrant 3a par rapport au cadre dormant 4, le procédé comprend une deuxième étape de commande, de sorte à désactiver le premier dispositif de verrouillage 20.
- Ici, la deuxième étape de commande est mise en oeuvre par l'émission d'un ordre de commande à l'unité électronique de contrôle 10 du dispositif d'entraînement motorisé 5, en particulier au moyen de l'une des unités de commande locale 12 ou centrale 13 ou encore d'un capteur.
- La deuxième étape de commande peut ainsi être mise en oeuvre manuellement, en particulier par l'utilisateur, ou automatiquement.
- Suite à la deuxième étape de commande, le procédé comprend une troisième étape de déplacement du premier ouvrant 3a par rapport au cadre dormant 4 à partir de la position entrebâillée verrouillée jusqu'à la position fermée verrouillée.
- Dans cet exemple de réalisation, le sens de déplacement du premier ouvrant 3a par rapport au cadre dormant 4, lors de la troisième étape de déplacement, est illustré par la flèche F2 aux
figures 11 et 12 . - Ici, la troisième étape de déplacement du premier ouvrant 3a par rapport au cadre dormant 4 est mise en oeuvre par l'activation électrique de l'actionneur électromécanique 6.
- Au cours du déplacement du premier ouvrant 3a par rapport au cadre dormant 4 à partir de la position entrebâillée verrouillée jusqu'à la position fermée verrouillée, le bras d'entraînement 18 est entraîné en déplacement au moyen de la navette 45 et de l'élément flexible 9.
- Ainsi, la désactivation du premier dispositif de verrouillage 20 est mise en oeuvre lorsque la navette 45 est positionnée à l'intérieur de l'évidement 37 du premier dispositif de verrouillage 20 et, plus particulièrement, lorsque la came 32 est déplacée jusqu'à sa position de repos par rapport au bras mobile 23 par un mouvement de rotation R4 autour du deuxième axe de rotation Y2, comme illustré à la
figure 5 . - De cette manière, la désactivation du premier dispositif de verrouillage 20 est mise en oeuvre uniquement lorsque la navette 45 est dans la position correspondant à la position fermée verrouillée du premier ouvrant 3a par rapport au cadre dormant 4.
- Un tel positionnement de la navette 45 par rapport au premier dispositif de verrouillage 20 permet de libérer la came 32 par rapport à la rampe 40 de la navette 45 et de ramener la came 32 dans sa position de repos. Ainsi, le dispositif de libération 29 est activé, suite au verrouillage du premier ouvrant 3a dans la position fermée, au moyen du deuxième dispositif de verrouillage 21.
- Ici, le déplacement de la came 32 dans sa position de repos par rapport au bras mobile 23 par le mouvement de rotation R4 autour du deuxième axe de rotation Y2 est configuré pour être mis en oeuvre uniquement lorsque la navette 45 est dans la position correspondant à la position fermée verrouillée du premier ouvrant 3a par rapport au cadre dormant 4.
- Avantageusement, tant que la came 32 est maintenue dans une position inclinée par la navette 45, en particulier par la rampe 40 de la navette 45, c'est-à-dire dans une position différente de la position de repos de la came 32, le premier dispositif de verrouillage 20 est configuré pour maintenir le premier ouvrant 3a dans une position entrebâillée verrouillée par rapport au cadre dormant 4, c'est-à-dire que le dispositif premier dispositif de verrouillage 20 est configuré pour empêcher une ouverture manuelle du premier ouvrant 3a par rapport au cadre dormant 4, autrement dit le bras d'entraînement 18 est retenu à l'intérieur de l'évidement 37 du premier dispositif de verrouillage 20 par la butée 31 du bras mobile 23.
- En outre, lors de l'atteinte de la position fermée du premier ouvrant 3a par rapport au cadre dormant 4 au moyen du dispositif d'entraînement motorisé 5, le dispositif de commande 22 logé dans le bras d'entraînement 18 active le deuxième dispositif de verrouillage 21, en particulier par le basculement de l'élément d'entraînement 30 à l'intérieur du bras d'entraînement 18, de sorte à déverrouiller le deuxième dispositif de verrouillage 21.
- De cette manière, le premier ouvrant 3a est déverrouillé par rapport au cadre dormant 4.
- Suite au déverrouillage du deuxième dispositif de verrouillage 21, le premier ouvrant 3a revient en position initiale par rapport au cadre dormant 4, ainsi que le bras mobile 23 par rapport à l'élément d'assemblage 25 et, plus particulièrement, à la traverse 47, de même que la came 32 par rapport au bras mobile 23, comme préalablement à la première étape de déplacement.
- Avantageusement, lorsque le premier ouvrant 3a est dans la position fermée verrouillée par rapport au cadre dormant 4, la came 32 est dans sa position de repos, autrement dit la came 32 n'est plus en contact avec la navette 45, en particulier la rampe 40 de la navette 45.
- Lors d'une nouvelle exécution de la première étape de commande et de la première étape de déplacement, le fonctionnement du premier dispositif de verrouillage 20 et du dispositif d'entraînement motorisé 5 décrit précédemment est mis en oeuvre de manière identique.
- Suite à l'atteinte de la position entrebâillée verrouillée du premier ouvrant 3a par rapport au cadre dormant 4, le procédé comprend une étape de surveillance de la position du premier ouvrant 3a par rapport au cadre dormant 4.
- Ainsi, l'étape de surveillance permet de détecter un déplacement du premier ouvrant 3a par rapport au cadre dormant 4.
- Ici, l'étape de surveillance est mise en oeuvre par au moins un capteur de détection de position d'un arbre de sortie du moteur électrique 7 de l'actionneur électromécanique 6.
- Dans l'exemple de réalisation, lors du déplacement du premier ouvrant 3a par rapport au cadre dormant 4, l'arbre de sortie du moteur électrique 7 de l'actionneur électromécanique 6 est entraîné en rotation au travers du dispositif d'entraînement motorisé 5.
- Ainsi, le déplacement du premier ouvrant 3a par rapport au cadre dormant 4 est déterminé par le capteur de détection de position de l'arbre de sortie du moteur électrique 7.
- Ici, le capteur de détection de position de l'arbre de sortie du moteur électrique 7 est un capteur à effet Hall.
- En variante, l'étape de surveillance est mise en oeuvre par au moins un capteur de détection de position d'un arbre de sortie de l'actionneur électromécanique 6.
- En variante, l'étape de surveillance est mise en oeuvre par au moins un capteur de détection de position du premier ouvrant 3a par rapport au cadre dormant 4.
- Le type et le nombre de capteurs de détection de position ne sont pas limitatifs et peuvent être différents. Il peut s'agir, notamment, d'un ou plusieurs capteurs optiques.
- Ici, l'étape de surveillance est mise en oeuvre au travers de l'unité électronique de contrôle 10 du dispositif d'entraînement motorisé 5.
- Suite à la détection d'un déplacement du premier ouvrant 3a par rapport au cadre dormant 4 au cours de l'étape de surveillance, le procédé comprend une étape de détermination d'une tentative d'intrusion.
- Avantageusement, dans le cas où un ordre de commande est émis à partir de l'une des unités de commande 12, 13 ou d'un capteur, l'étape de détermination d'une tentative d'intrusion est inhibée.
- Ainsi, le déplacement du premier ouvrant 3a par rapport au cadre dormant 4 détecté au cours de l'étape de surveillance est considéré comme un déplacement mis en oeuvre volontairement par un utilisateur.
- De cette manière, l'étape de surveillance permet de déterminer si le déplacement du premier ouvrant 3a par rapport au cadre dormant 4 est mis en oeuvre manuellement.
- Avantageusement, une tentative d'intrusion est déterminée dans le cas où la longueur du déplacement du premier ouvrant 3a par rapport au cadre dormant 4 est supérieure à une valeur seuil M prédéterminée au cours d'une période de temps T prédéterminée.
- Ainsi, de tels paramètres M, T pour la caractérisation du déplacement du premier ouvrant 3a par rapport au cadre dormant 4 détecté permet d'éviter de déterminer de manière intempestive une tentative d'intrusion.
- A titre d'exemple nullement limitatif, une tentative d'intrusion est déterminée dans le cas où la longueur du déplacement du premier ouvrant 3a par rapport au cadre dormant 4 est supérieure à un centimètre au cours d'une période de temps d'une valeur d'une minute.
- Ici, l'étape de détermination d'une tentative d'intrusion est mise en oeuvre au travers de l'unité électronique de contrôle 10 du dispositif d'entraînement motorisé 5.
- Dans le cas où une tentative d'intrusion a été déterminée lors de l'étape de détermination d'une tentative d'intrusion, le procédé comprend une quatrième étape de déplacement du premier ouvrant 3a par rapport au cadre dormant 4 à partir de la position entrebâillée verrouillée jusqu'à la position fermée verrouillée.
- Dans cet exemple de réalisation, le sens de déplacement du premier ouvrant 3a par rapport au cadre dormant 4, lors de la quatrième étape de déplacement, correspond à celui de la flèche F2.
- Ici, la quatrième étape de déplacement du premier ouvrant 3a par rapport au cadre dormant 4 est mise en oeuvre par l'activation électrique de l'actionneur électromécanique 6.
- Cette quatrième étape de déplacement est mise en oeuvre de manière similaire à la troisième étape de déplacement.
- Avantageusement, la quatrième étape du procédé de commande est mise en oeuvre de manière automatique par le dispositif d'entraînement motorisé 5 et, plus particulièrement, par l'unité électronique de contrôle 10, de sorte à placer le premier ouvrant 3a par rapport au cadre dormant 4 dans la position fermée, elle-même verrouillée par le deuxième dispositif de verrouillage 21.
- Ainsi, la fenêtre 2 et, plus particulièrement, le bâtiment est protégé contre la tentative d'intrusion en fermant le premier ouvrant 3a par rapport cadre dormant 4 au moyen du dispositif d'entraînement motorisé 5.
- Préalablement à la quatrième étape de déplacement, le procédé comprend une étape de réveil de l'actionneur électromécanique 6 à partir d'un état de veille.
- Avantageusement, dans le cas où une tentative d'intrusion a été déterminée lors de l'étape de détermination d'une tentative d'intrusion, le procédé peut également comprendre une étape de transmission d'une information à un système d'alarme, non représenté.
- Ainsi, le système d'alarme peut déclencher une sirène, de sorte à émettre un signal sonore, émettre une notification vers au moins un terminal mobile, par exemple vers un téléphone intelligent, de sorte à informer un ou plusieurs utilisateurs, et/ou émettre une notification vers l'unité de commande centrale, de sorte à commander la fermeture de l'écran de chaque dispositif d'occultation, par exemple de chaque volet.
- Grâce à la présente invention, le premier dispositif de verrouillage permet de verrouiller l'ouvrant par rapport au cadre dormant dans la position entrebâillée verrouillée au moyen du dispositif d'entraînement motorisé.
- De cette manière, le premier dispositif de verrouillage permet de garantir la ventilation du bâtiment de manière sécurisée par un entrebâillement de l'ouvrant par rapport au cadre dormant, en particulier au moyen de pièces simples.
- En outre, le déverrouillage de l'ouvrant par rapport au cadre dormant en lien avec le premier dispositif de verrouillage est mis en oeuvre au moyen du dispositif d'entraînement motorisé configuré pour générer un déplacement de l'ouvrant par rapport au cadre dormant passant par la position fermée et verrouillée de l'ouvrant par rapport au cadre dormant au moyen du deuxième dispositif de verrouillage.
- De cette manière, le déverrouillage de l'ouvrant par rapport au cadre dormant est mis en oeuvre uniquement au moyen du dispositif d'entraînement motorisé.
- Par ailleurs, l'unité électronique de contrôle du dispositif d'entraînement motorisé permet de commander le déplacement de l'ouvrant par rapport au cadre dormant pour verrouiller l'ouvrant par rapport au cadre dormant dans la position entrebâillée verrouillée et pour déverrouiller l'ouvrant par rapport au cadre dormant de la position entrebâillée verrouillée.
- Le premier dispositif de verrouillage permet ainsi d'interdire, ou tout au moins retarder, une tentative d'intrusion d'un individu.
- De nombreuses modifications peuvent être apportées aux exemples de réalisation décrits précédemment sans sortir du cadre de l'invention défini par les revendications.
- En particulier, le dispositif d'entraînement motorisé 5 peut être configuré pour déplacer par coulissement plusieurs ouvrants 3a, 3b au moyen de l'élément flexible 9, selon un même sens de déplacement ou selon un sens de déplacement opposé.
- En variante, le moteur électrique 7 de l'actionneur électromécanique 6 peut être du type asynchrone ou à courant continu.
- En outre, les modes de réalisation et variantes envisagés peuvent être combinés pour générer de nouveaux modes de réalisation de l'invention, sans sortir du cadre de l'invention défini par les revendications.
Claims (10)
- Procédé de commande en fonctionnement d'un dispositif d'entraînement motorisé (5) d'une fenêtre coulissante (2) pour un bâtiment,la fenêtre coulissante (2) comprenant :- un cadre dormant (4),- au moins un ouvrant (3a, 3b), et- un premier dispositif de verrouillage (20) de l'ouvrant (3a) par rapport au cadre dormant (4) dans une position entrebâillée verrouillée, la position entrebâillée verrouillée étant disposée entre une position ouverte et une position fermée de l'ouvrant (3a) par rapport au cadre dormant (4), le premier dispositif de verrouillage (20) comprenant un bras mobile (23) autour d'un axe de rotation (Y1),caractérisé en ce que la fenêtre (2) comprend également :- un dispositif d'entraînement motorisé (5) configuré pour déplacer par coulissement l'ouvrant (3a) par rapport au cadre dormant (4), et- un deuxième dispositif de verrouillage (21) qui verrouille l'ouvrant (3a) par rapport au cadre dormant (4) dans la position fermée et passe ainsi l'ouvrant (3a) dans une position fermée verrouillée,en ce que le dispositif d'entraînement motorisé (5) comprend :- une unité électronique de contrôle (10),- un actionneur électromécanique (6), l'actionneur électromécanique (6) comprenant un moteur électrique (7),- un élément flexible (9), l'élément flexible (9) étant configuré pour entraîner en déplacement l'ouvrant (3a) par rapport au cadre dormant (4), lorsque l'actionneur électromécanique (6) est activé électriquement, et- un bras d'entraînement (18), le bras d'entraînement (18) étant relié, d'une part, à l'ouvrant (3a) et, d'autre part, à l'élément flexible (9),en ce que le bras d'entraînement (18) coopère avec le bras mobile (23) du premier dispositif de verrouillage (20),en ce que le bras mobile (23) maintient le bras d'entraînement (18) entre la position entrebâillée verrouillée et la position fermée de l'ouvrant (3a) par rapport au cadre dormant (4), suite au franchissement de la position entrebâillée verrouillée, lors d'un déplacement de l'ouvrant (3a) par rapport au cadre dormant (4) à partir d'une position ouverte vers la position fermée, mis en oeuvre par l'activation électrique de l'actionneur électromécanique (6),en ce que le premier dispositif de verrouillage (20) comprend un dispositif de libération (29) du bras mobile (23) par rapport au bras d'entraînement (18), le dispositif de libération (29) étant activé, suite au verrouillage de l'ouvrant (3a) par rapport au cadre dormant (4) dans la position fermée, au moyen du deuxième dispositif de verrouillage (21), et en ce que le procédé comprend au moins :- une étape de déplacement de l'ouvrant (3a) par rapport au cadre dormant (4) à partir d'une position ouverte jusqu'à la position entrebâillée verrouillée de l'ouvrant (3a) par rapport au cadre dormant (4), mise en oeuvre par l'activation électrique de l'actionneur électromécanique (6),- suite à l'atteinte de la position entrebâillée verrouillée de l'ouvrant (3a) par rapport au cadre dormant (4), une étape de surveillance de la position de l'ouvrant (3a) par rapport au cadre dormant (4),- suite à une détection d'un déplacement de l'ouvrant (3a) par rapport au cadre dormant (4) au cours de l'étape de surveillance, une étape de détermination d'une tentative d'intrusion, et- dans le cas où une tentative d'intrusion a été déterminée lors de l'étape de détermination d'une tentative d'intrusion, une autre étape de déplacement de l'ouvrant (3a) par rapport au cadre dormant (4) à partir de la position entrebâillée verrouillée jusqu'à la position fermée verrouillée.
- Procédé de commande en fonctionnement d'un dispositif d'entraînement motorisé (5) d'une fenêtre coulissante (2) pour un bâtiment selon la revendication 1, caractérisé en ce que, dans le cas où un ordre de commande est émis à partir d'une unité de commande (12, 13) ou d'un capteur, l'étape de détermination d'une tentative d'intrusion est inhibée.
- Procédé de commande en fonctionnement d'un dispositif d'entraînement motorisé (5) d'une fenêtre coulissante (2) pour un bâtiment selon la revendication 1 ou selon la revendication 2, caractérisé en ce qu'une tentative d'intrusion est déterminée dans le cas où la longueur du déplacement de l'ouvrant (3a) par rapport au cadre dormant (4) est supérieure à une valeur seuil (M) prédéterminée au cours d'une période de temps (T) prédéterminée.
- Procédé de commande en fonctionnement d'un dispositif d'entraînement motorisé (5) d'une fenêtre coulissante (2) pour un bâtiment selon l'une quelconque des revendications 1 à 3, caractérisé en ce que l'autre étape de déplacement est mise en oeuvre de manière automatique par le dispositif d'entraînement motorisé (5), de sorte à placer l'ouvrant (3a) par rapport au cadre dormant (4) dans la position fermée, elle-même verrouillée par le deuxième dispositif de verrouillage (21).
- Procédé de commande en fonctionnement d'un dispositif d'entraînement motorisé (5) d'une fenêtre coulissante (2) pour un bâtiment selon l'une quelconque des revendications 1 à 4, caractérisé en ce que, dans le cas où une tentative d'intrusion a été déterminée lors de l'étape de détermination d'une tentative d'intrusion, le procédé comprend une étape de transmission d'une information à un système d'alarme.
- Procédé de commande en fonctionnement d'un dispositif d'entraînement motorisé (5) d'une fenêtre coulissante (2) pour un bâtiment selon la revendications 5, caractérisé en ce que, dans le cas où une tentative d'intrusion a été déterminée lors de l'étape de détermination d'une tentative d'intrusion, le système d'alarme déclenche une sirène, de sorte à émettre un signal sonore, émet une notification vers au moins un terminal mobile, de sorte à informer un ou plusieurs utilisateurs, et/ou émet une notification vers une unité de commande centrale, de sorte à commander la fermeture d'un écran de dispositif d'occultation.
- Procédé de commande en fonctionnement d'un dispositif d'entraînement motorisé (5) d'une fenêtre coulissante (2) pour un bâtiment selon l'une quelconque des revendications 1 à 6, caractérisé en ce que, préalablement à l'autre étape de déplacement, le procédé comprend une étape de réveil de l'actionneur électromécanique (6) à partir d'un état de veille.
- Fenêtre coulissante (2) pour un bâtiment, la fenêtre coulissante (2) comprenant :- un cadre dormant (4),- au moins un ouvrant (3a, 3b), et- un premier dispositif de verrouillage (20) de l'ouvrant (3a) par rapport au cadre dormant (4) dans une position entrebâillée verrouillée, la position entrebâillée verrouillée étant disposée entre une position ouverte et une position fermée de l'ouvrant (3a) par rapport au cadre dormant (4), le premier dispositif de verrouillage (20) comprenant un bras mobile (23) autour d'un axe de rotation (Y1),caractérisée en ce que la fenêtre (2) comprend également :- un dispositif d'entraînement motorisé (5) configuré pour déplacer par coulissement l'ouvrant (3a) par rapport au cadre dormant (4), et- un deuxième dispositif de verrouillage (21) de l'ouvrant (3a) par rapport au cadre dormant (4) dans la position fermée,en ce que le dispositif d'entraînement motorisé (5) comprend :- une unité électronique de contrôle (10),- un actionneur électromécanique (6), l'actionneur électromécanique (6) comprenant un moteur électrique (7),- un élément flexible (9), l'élément flexible (9) étant configuré pour entraîner en déplacement l'ouvrant (3a) par rapport au cadre dormant (4), lorsque l'actionneur électromécanique (6) est activé électriquement, et- un bras d'entraînement (18), le bras d'entraînement (18) étant relié, d'une part, à l'ouvrant (3a) et, d'autre part, à l'élément flexible (9),en ce que le bras d'entraînement (18) coopère avec le bras mobile (23) du premier dispositif de verrouillage (20),en ce que le bras mobile (23) maintient le bras d'entraînement (18) entre la position entrebâillée verrouillée et la position fermée de l'ouvrant (3a) par rapport au cadre dormant (4), suite au franchissement de la position entrebâillée verrouillée, lors d'un déplacement de l'ouvrant (3a) par rapport au cadre dormant (4) à partir d'une position ouverte vers la position fermée, mis en oeuvre par l'activation électrique de l'actionneur électromécanique (6),en ce que le premier dispositif de verrouillage (20) comprend un dispositif de libération (29) du bras mobile (23) par rapport au bras d'entraînement (18), le dispositif de libération (29) étant activé, suite au verrouillage de l'ouvrant (3a) par rapport au cadre dormant (4) dans la position fermée, au moyen du deuxième dispositif de verrouillage (21),et en ce que l'unité électronique de contrôle (10) est configurée pour mettre en oeuvre les étapes du procédé conforme à l'une quelconque des revendications 1 à 7.
- Fenêtre coulissante (2) pour un bâtiment selon la revendication 8, caractérisée en ce que l'actionneur électromécanique (6) est de type réversible.
- Installation domotique, caractérisée en ce que ladite installation comprend une fenêtre coulissante (2) conforme à la revendication 8 ou à la revendication 9.
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| FR1756731A FR3069007B1 (fr) | 2017-07-17 | 2017-07-17 | Fenetre coulissante pour un batiment et installation domotique comprenant une telle fenetre, ainsi que procede de commande associe |
| EP18737936.7A EP3655606A1 (fr) | 2017-07-17 | 2018-07-16 | Fenêtre coulissante pour un bâtiment et installation domotique comprenant une telle fenêtre coulissante, ainsi que procédé de commande associé |
| PCT/EP2018/069285 WO2019016147A1 (fr) | 2017-07-17 | 2018-07-16 | Fenêtre coulissante pour un bâtiment et installation domotique comprenant une telle fenêtre coulissante, ainsi que procédé de commande associé |
Related Parent Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP18737936.7A Division EP3655606A1 (fr) | 2017-07-17 | 2018-07-16 | Fenêtre coulissante pour un bâtiment et installation domotique comprenant une telle fenêtre coulissante, ainsi que procédé de commande associé |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| EP4008866A1 EP4008866A1 (fr) | 2022-06-08 |
| EP4008866B1 true EP4008866B1 (fr) | 2024-08-14 |
Family
ID=60080975
Family Applications (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP18737936.7A Pending EP3655606A1 (fr) | 2017-07-17 | 2018-07-16 | Fenêtre coulissante pour un bâtiment et installation domotique comprenant une telle fenêtre coulissante, ainsi que procédé de commande associé |
| EP22152194.1A Active EP4008866B1 (fr) | 2017-07-17 | 2018-07-16 | Procédé de commande en fonctionnement d'un dispositif d'entraînement motorisé d'une fenêtre coulissante pour un bâtiment, fenêtre coulissante et installation domotique associées |
Family Applications Before (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP18737936.7A Pending EP3655606A1 (fr) | 2017-07-17 | 2018-07-16 | Fenêtre coulissante pour un bâtiment et installation domotique comprenant une telle fenêtre coulissante, ainsi que procédé de commande associé |
Country Status (3)
| Country | Link |
|---|---|
| EP (2) | EP3655606A1 (fr) |
| FR (1) | FR3069007B1 (fr) |
| WO (1) | WO2019016147A1 (fr) |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| FR3101904B1 (fr) | 2019-10-09 | 2021-10-29 | Somfy Activites Sa | Procédé de commande en fonctionnement d’un dispositif d’entraînement motorisé d’une fenêtre coulissante pour un bâtiment, fenêtre et installation domotique associées |
Family Cites Families (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US3352586A (en) * | 1965-09-20 | 1967-11-14 | Paulyne Hakanson M | Locking device for sliding windows and doors |
| JP2006194065A (ja) * | 2004-12-17 | 2006-07-27 | Hamada Kousyou Co Ltd | 窓(扉、戸等の開閉手段を含む)のロック及び/又は開閉を自動制御する窓の自動開閉システム |
| KR20090098240A (ko) * | 2008-03-13 | 2009-09-17 | (주) 중앙디자인 | 창문 개폐장치 |
-
2017
- 2017-07-17 FR FR1756731A patent/FR3069007B1/fr active Active
-
2018
- 2018-07-16 EP EP18737936.7A patent/EP3655606A1/fr active Pending
- 2018-07-16 WO PCT/EP2018/069285 patent/WO2019016147A1/fr unknown
- 2018-07-16 EP EP22152194.1A patent/EP4008866B1/fr active Active
Also Published As
| Publication number | Publication date |
|---|---|
| WO2019016147A1 (fr) | 2019-01-24 |
| EP4008866A1 (fr) | 2022-06-08 |
| FR3069007B1 (fr) | 2019-08-23 |
| EP3655606A1 (fr) | 2020-05-27 |
| FR3069007A1 (fr) | 2019-01-18 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP3722547B1 (fr) | Dispositif d'entraînement motorisé, fenêtre coulissante pour un bâtiment et installation domotique associées | |
| EP3571368B1 (fr) | Fenêtre coulissante pour un bâtiment, installation domotique comprenant une telle fenêtre coulissante et procédé de commande en fonctionnement d'un dispositif d'entraînement motorisé d'une telle fenêtre | |
| FR3069008A1 (fr) | Fenetre coulissante pour un batiment et installation domotique comprenant une telle fenetre coulissante, ainsi que procede de commande associe | |
| EP3530857B1 (fr) | Procédé de commande en fonctionnement d'un dispositif d'entraînement motorisé d'une fenêtre pour un bâtiment, fenêtre et installation domotique associés | |
| EP4008866B1 (fr) | Procédé de commande en fonctionnement d'un dispositif d'entraînement motorisé d'une fenêtre coulissante pour un bâtiment, fenêtre coulissante et installation domotique associées | |
| EP3216963B1 (fr) | Fenêtre oscillo-battante pour un bâtiment et installation domotique comprenant une telle fenêtre oscillo-battante | |
| EP3529439B1 (fr) | Procédé de commande en fonctionnement d'un dispositif d'entraînement motorisé d'une fenêtre coulissante pour un bâtiment | |
| EP3510227B1 (fr) | Fenêtre coulissante pour un bâtiment et installation domotique comprenant une telle fenêtre coulissante | |
| EP3805503B1 (fr) | Procédé de commande en fonctionnement d'un dispositif d'entraînement motorisé d'une fenêtre coulissante pour un bâtiment, fenêtre et installation domotique associées | |
| EP3517721B1 (fr) | Fenêtre coulissante pour un bâtiment et installation domotique comprenant une telle fenêtre coulissante | |
| EP3805505B1 (fr) | Procédé de commande en fonctionnement d'un dispositif d'entraînement motorisé d'une fenêtre coulissante pour un bâtiment, fenêtre et installation domotique associées | |
| EP3333349B1 (fr) | Fenêtre oscillo-battante pour un bâtiment, installation domotique comprenant une telle fenêtre et procédé de commande en fonctionnement d'un dispositif d'entraînement motorisé d'une telle fenêtre | |
| EP3805492B1 (fr) | Procédé de commande en fonctionnement d'un dispositif d'entraînement motorisé d'une fenêtre coulissante pour un bâtiment, fenêtre et installation domotique associées | |
| EP4116535B1 (fr) | Procédé de commande en fonctionnement d'un dispositif d'entraînement motorisé d'une fenêtre coulissante pour un bâtiment, fenêtre et installation domotique associées | |
| FR3079259A1 (fr) | Fenetre coulissante pour un batiment et installation domotique comprenant une telle fenetre coulissante | |
| EP3190253B1 (fr) | Fenêtre oscillo-battante pour un bâtiment et installation domotique comprenant une telle fenêtre oscillo-battante | |
| FR3095000A1 (fr) | Dispositif d’entraînement motorisé, fenêtre coulissante pour un bâtiment et installation domotique associées |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: THE APPLICATION HAS BEEN PUBLISHED |
|
| AC | Divisional application: reference to earlier application |
Ref document number: 3655606 Country of ref document: EP Kind code of ref document: P |
|
| AK | Designated contracting states |
Kind code of ref document: A1 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: REQUEST FOR EXAMINATION WAS MADE |
|
| 17P | Request for examination filed |
Effective date: 20221124 |
|
| RBV | Designated contracting states (corrected) |
Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| GRAP | Despatch of communication of intention to grant a patent |
Free format text: ORIGINAL CODE: EPIDOSNIGR1 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: GRANT OF PATENT IS INTENDED |
|
| INTG | Intention to grant announced |
Effective date: 20240402 |
|
| GRAS | Grant fee paid |
Free format text: ORIGINAL CODE: EPIDOSNIGR3 |
|
| GRAA | (expected) grant |
Free format text: ORIGINAL CODE: 0009210 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: THE PATENT HAS BEEN GRANTED |
|
| AC | Divisional application: reference to earlier application |
Ref document number: 3655606 Country of ref document: EP Kind code of ref document: P |
|
| AK | Designated contracting states |
Kind code of ref document: B1 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| REG | Reference to a national code |
Ref country code: GB Ref legal event code: FG4D Free format text: NOT ENGLISH |
|
| RIN1 | Information on inventor provided before grant (corrected) |
Inventor name: BUFFLIER, NADEGE Inventor name: HOFF, LAURENT Inventor name: EICHLER, MICKAEL Inventor name: CRON, JULIEN Inventor name: BEAU, STEPHANE Inventor name: CAVAREC, PIERRE-EMMANUEL |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: EP |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R096 Ref document number: 602018073269 Country of ref document: DE |
|
| REG | Reference to a national code |
Ref country code: IE Ref legal event code: FG4D Free format text: LANGUAGE OF EP DOCUMENT: FRENCH |