EP3991876A1 - Method and device for handling a ladle shroud - Google Patents
Method and device for handling a ladle shroud Download PDFInfo
- Publication number
- EP3991876A1 EP3991876A1 EP21198254.1A EP21198254A EP3991876A1 EP 3991876 A1 EP3991876 A1 EP 3991876A1 EP 21198254 A EP21198254 A EP 21198254A EP 3991876 A1 EP3991876 A1 EP 3991876A1
- Authority
- EP
- European Patent Office
- Prior art keywords
- shroud
- ladle
- handling device
- manipulator
- robot
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
- 238000000034 method Methods 0.000 title claims description 10
- 230000008878 coupling Effects 0.000 claims description 31
- 238000010168 coupling process Methods 0.000 claims description 31
- 238000005859 coupling reaction Methods 0.000 claims description 31
- 239000000155 melt Substances 0.000 claims description 11
- 239000002184 metal Substances 0.000 claims description 5
- 238000005266 casting Methods 0.000 description 6
- XKRFYHLGVUSROY-UHFFFAOYSA-N Argon Chemical compound [Ar] XKRFYHLGVUSROY-UHFFFAOYSA-N 0.000 description 4
- 230000003287 optical effect Effects 0.000 description 4
- 238000009434 installation Methods 0.000 description 3
- 229910052786 argon Inorganic materials 0.000 description 2
- 238000005259 measurement Methods 0.000 description 2
- 241001310793 Podium Species 0.000 description 1
- QVGXLLKOCUKJST-UHFFFAOYSA-N atomic oxygen Chemical compound [O] QVGXLLKOCUKJST-UHFFFAOYSA-N 0.000 description 1
- 238000009749 continuous casting Methods 0.000 description 1
- 230000001276 controlling effect Effects 0.000 description 1
- 230000001419 dependent effect Effects 0.000 description 1
- 238000011161 development Methods 0.000 description 1
- 238000007599 discharging Methods 0.000 description 1
- 238000006073 displacement reaction Methods 0.000 description 1
- 239000007788 liquid Substances 0.000 description 1
- 239000000463 material Substances 0.000 description 1
- 230000003647 oxidation Effects 0.000 description 1
- 238000007254 oxidation reaction Methods 0.000 description 1
- 239000001301 oxygen Substances 0.000 description 1
- 229910052760 oxygen Inorganic materials 0.000 description 1
- 238000012545 processing Methods 0.000 description 1
- 239000011819 refractory material Substances 0.000 description 1
- 230000001105 regulatory effect Effects 0.000 description 1
- 230000003252 repetitive effect Effects 0.000 description 1
- 230000011664 signaling Effects 0.000 description 1
- 239000000725 suspension Substances 0.000 description 1
- 239000002699 waste material Substances 0.000 description 1
Images


Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B22—CASTING; POWDER METALLURGY
- B22D—CASTING OF METALS; CASTING OF OTHER SUBSTANCES BY THE SAME PROCESSES OR DEVICES
- B22D41/00—Casting melt-holding vessels, e.g. ladles, tundishes, cups or the like
- B22D41/50—Pouring-nozzles
- B22D41/56—Means for supporting, manipulating or changing a pouring-nozzle
Definitions
- the invention relates to a handling device and a method for handling a shroud in the area of a ladle.
- a molten metal is poured from a ladle into a tundish, and then from the tundish into a mold or directly from a ladle into a mold.
- the melt solidifies on the cooled mold walls of the mold, so that a partially solidified cast strand with a solidified strand shell and a usually still liquid core is discharged from the mold, which is then further cooled.
- the melt is fed from the ladle through a so-called shroud into the distributor or directly into the mold to prevent the melt from reacting with the oxygen in the air after leaving the ladle .
- the shroud is usually guided on what is known as a shroud manipulator, which is also referred to as a ladle shroud manipulator (LSM for short).
- LSM ladle shroud manipulator
- a shadow tube manipulator is often operated manually. Operating the shadow tube manipulator manually is an expensive and dangerous job for the operator.
- CN 110653365A and CN 110625106A disclose devices and methods in which the spatial position of a spout for discharging a metallic melt from a metallurgical vessel is determined by a robot arranged on a casting platform and a shroud manipulator is controlled by the robot with a cable or wirelessly to a shroud by means of the shroud manipulator turn on or remove the spout.
- the object of the invention is to automate the handling of a shroud, in particular using a manually operable shroud manipulator.
- the object is achieved according to the invention by a handling device having the features of claim 1 and a method having the features of claim 15 .
- the handling device enables mechanical guidance of a shroud manipulator by a robot for positioning the shroud at a ladle outlet before pouring metallic melt from the ladle and removing the shroud from the ladle outlet after pouring the melt.
- An optical position measuring system provides the position of the pouring ladle outlet required by the robot to guide the shroud manipulator.
- the handling device can be implemented with a conventional, manually operated shroud manipulator.
- such a shroud manipulator can be expanded inexpensively and with little installation effort into a handling device according to the invention with automated operation of the shroud manipulator by a robot, since in addition to the robot itself only the optical position measuring system and, if necessary, a signaling connection to the shroud manipulator, via which a drive of the shroud manipulator by the robot can be controlled, and/or a coupling element on which the robot can guide the shadow tube manipulator must be installed.
- the shroud manipulator has a support arm which can be pivoted about a transverse axis by a drive and has a shroud holder for the shroud.
- the drive has a hydraulic cylinder, for example.
- the robot is set up to activate the drive after positioning the shroud tube on the ladle outlet and to deactivate it before the shroud tube is pulled off the ladle outlet.
- the shroud tube arranged in the shroud tube holder can be moved and pressed against the pouring ladle outlet.
- the advantage of pressing the shroud tube against the pouring ladle outlet while the melt is being poured out of the ladle is that the shroud tube can easily be pulled off the pouring ladle outlet again after the melt has been poured out, and that no disruptive and dirt-prone locking device is required.
- a drive of the support arm with a hydraulic cylinder Controlling the drive by the robot enables fully automated handling of the shroud tube before, during and after pouring melt from the pouring ladle.
- the robot is set up to insert the shroud into the shroud holder and/or to remove it from the shroud holder.
- the robot is also advantageously used to equip the shroud manipulator with the shroud tube and to remove the shroud tube from the shroud manipulator and can therefore also be used to replace the shroud tube.
- the support arm of the shroud manipulator is movably mounted on a support arm carrier of the shroud manipulator via a double joint with two mutually parallel axes of rotation spaced apart.
- the axes of rotation are aligned vertically.
- the support arm of the shroud manipulator can be freely displaced by the robot in an area of a plane that is defined by the length of the support arm and is perpendicular to the axes of rotation, in particular in a horizontal plane.
- the support arm of the shroud manipulator can be rotated about its longitudinal axis by a motor.
- the shadow tube can be tilted on the support arm. This tiltability is advantageous so that appropriate tilting, if necessary, prevents the shroud tube from colliding with mechanical obstacles in the region of the ladle when it is placed against the ladle or when it is pulled off the ladle.
- a coupling element is arranged on the shroud manipulator, for example on its support arm, on which the robot makes contact with the shroud manipulator.
- the coupling element is spherical and the robot has a gripping tool that is designed to grip the coupling element.
- the gripping tool preferably grips the coupling element with a play in the range of 0.1 mm to 0.5 mm.
- the coupling element is made of a hardened metal, for example.
- the coupling element defines the robot's point of attack on the shroud tube manipulator.
- a spherical coupling element which can be gripped by a gripping tool of the robot with some play, allows the gripping tool to rotate relative to the coupling element when guiding the support arm.
- a clearance in the range of 0.1 mm to 0.5 mm enables a positioning accuracy of less than 1 mm when positioning the shroud tube arranged on the shroud manipulator at the ladle outlet by the robot. This accuracy is required in order to position the shroud tube precisely enough at the pouring ladle outlet.
- the shroud manipulator is arranged on a movable carriage. This allows the shroud tube manipulator to be moved with the traversing carriage if necessary.
- the robot is designed as a six-axis industrial robot.
- Such robots are today available relatively inexpensively and, in particular in connection with the above-mentioned spherical coupling element, is suitable and sufficient for guiding the shroud manipulator on the coupling element.
- the shroud pipe manipulator is accordingly controlled by the robot through direct mechanical contact in such a way that the shroud pipe arranged on the shroud pipe manipulator can reach a ladle outlet of the ladle before melt is poured out of the ladle is turned on and withdrawn from the pouring ladle outlet after the pouring of the melt.
- FIG 1 shows a perspective view of an embodiment of a handling device 1 according to the invention for handling a shroud tube 2 in the area of a ladle 3 with a ladle outlet 4 corresponding to the shroud tube 2.
- the handling device 1 comprises a shroud tube manipulator 5, a position measuring system 6 and a robot 7.
- the robot 7 is set up to guide the shroud manipulator 5 in a manner described in more detail below by direct mechanical contact in such a way that the shroud pipe 2 arranged on the shroud manipulator 5 is positioned at the ladle outlet 4 before the pouring of metallic melt from the ladle 3 and after the pouring of the melt from the pouring ladle outlet 4 is withdrawn.
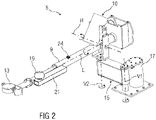
- FIG 2 shows a perspective view of the shroud manipulator 5 of FIG figure 1 handling device 1 shown.
- the shadow tube manipulator 5 has a support arm 9 which can be pivoted about a horizontal transverse axis H by a drive 10 .
- the drive 10 has a hydraulic cylinder 11 which is arranged above the support arm 9 .
- the support arm 9 has a shroud holder 13 into which the shroud 2 can be inserted.
- the shroud tube mount 13 forms one end of the support arm 9.
- the support arm 9 is movably mounted on a support arm carrier 17 of the shroud tube manipulator 5 via a double joint 15 with two spaced-apart vertical axes of rotation V1, V2, which are parallel to one another and perpendicular to the transverse axis H.
- the support arm 9 can be rotated about its longitudinal axis L by a motor (not shown).
- a coupling element 19 is mounted on the support arm 9, on which the robot 7 contacts the shroud manipulator 5 in order to move the support arm 9.
- the coupling element 19 is at one Coupling element carrier 21 is arranged, which is attached to the support arm 9.
- the coupling element 19 is spherical and made of a hardened metal.
- the shroud manipulator 5 is arranged on a displaceable carriage 22 and can thus be traversed with the carriage 22 .
- the shadow tube manipulator 5 has a (in figure 2 not shown) gallows-shaped holding device 23, in which a mechanical locking device 24 can be latched to the support arm 9 to lock the support arm 9 in a defined parking position.
- the shroud manipulator 5 can also have an argon feed to the shroud holder 13, by means of which argon is automatically discharged during the pouring out of melt from the casting ladle 3 from an annular nozzle running in a ring around a contact point of the shroud with the casting ladle outlet 4 in order to prevent possible oxidation processes (for example by an incomplete seal) and to prevent blockages of the shroud tube 2.
- a mechanical folding mechanism is arranged on the support arm 9, which automatically folds the annular nozzle into a working position when the shading tube 2 is inserted into the shading tube holder 13.
- the robot 7 is designed as a six-axis industrial robot and is stationarily arranged on a ladle operator platform 25 .
- the robot 7 has a lifting force of at least 3 kN.
- the robot 7 has an exchangeable gripping tool 27 which is designed to grip the coupling element 19 in order to guide the support arm 9 of the shroud manipulator 5 on the coupling element 19 .
- the gripping tool 27 grips the coupling element 19 with a play ranging from 0.1 mm to 0.5 mm.
- a relative twistability of the gripping tool 27 relative to the coupling element 19 when guiding the support arm 9 but on the other hand also achieves a positioning accuracy of less than 1 mm when positioning the shroud tube 2 arranged in the shroud tube holder 13 on the ladle outlet 4 by the robot 7 when the robot 7 moves the support arm 9 on the coupling element 19 to the ladle outlet 4.
- figure 1 shows the robot 7 guiding the support arm 9, with the gripping tool 27 gripping the coupling element 19.
- the position measuring system 6 is set up to detect a position of the pouring ladle outlet 4 and to provide it to the robot 7 .
- the position measuring system 6 has a stereo camera system, from whose camera images the position is determined.
- a determination of the position of the ladle outlet 4 with an accuracy of less than 1 mm is required.
- so-called target plates with optical markings are mounted in the vicinity of the ladle outlet 4, for example.
- the support arm 9 of the shroud manipulator 5 is freely displaceable in a region of a horizontal plane defined by the length of the support arm 9. Due to the pivotability of the support arm 9 about the transverse axis H by means of the drive 10 with the hydraulic cylinder 11, the shroud 2 arranged in the shroud holder 13 can be moved vertically and pressed against the casting ladle outlet 4. Due to the motor-driven rotatability of the support arm 9 about its longitudinal axis L, the shroud 2 can also be tilted against the vertical direction.
- the shroud manipulator 5 can also be operated manually by a human operator.
- the displacement of the support arm 9 in the horizontal plane requires only minimal effort and can be effected manually by the operator, while the pivoting of the support arm 9 about the transverse axis H by the drive 10 with the hydraulic cylinder 11 and the rotation of the support arm 9 about its longitudinal axis L are effected by the engine, with the drive 10 and engine being activated by the operator.
- the robot 7 guides the support arm 9 on the coupling element 19 only towards the ladle outlet 4 or away from the ladle outlet 4 .
- the shroud pipe 2 is permanently pressed against the ladle outlet 4 by the drive 10 with the hydraulic cylinder 11 with a contact force.
- the robot 7 activates this after the shading tube 2 has been placed on the Ladle outlet 4 deactivates the drive 10 and deactivates the drive 10 before the shroud 2 is pulled off the ladle outlet 4.
- the robot 7 can be decoupled from the shroud manipulator 5 in order to perform other tasks with the robot 7 if necessary.
- the permanent pressing of the shroud tube 2 against the ladle outlet 4 while pouring melt out of the ladle 3 has the advantage that the shroud tube 2 can easily be pulled off the ladle outlet 4 and no mechanical means are needed to hold the shroud tube 2 on the ladle outlet 4 Closure device is required, which is prone to failure and dirt.
- the robot 7 can, if necessary, activate the motor for rotating the support arm 9 about its longitudinal axis L.
- the robot 7 has a wired or wireless signal connection with controllers of the drive 10 and the motor in order to send corresponding control signals to the controllers.
- the hydraulic cylinder 11 is not regulated to balance the support arm 9 in general manually operated installations known in the prior art and in a preferred embodiment of the invention. Therefore, a human operator must manually attach or remove counterweights in this configuration if the load on the support arm 9 changes significantly, for example if the shroud 2 has become heavier after a pouring process due to blockages or a new shroud 2 has been hung in, or after a used one Shadow pipe 2 was disposed of in a waste dump.
- load changes can easily be absorbed by the robot 7 without counterweights.
- An advantage of the robot-supported guidance of the shroud manipulator 2 according to the invention is therefore also that there is no need for complex control of the hydraulic cylinder 11, which, for example, also Use of proportional valves and position sensors for detecting the current position of the support arm 9 could require.
- the robot 7 is also set up to insert the shroud 2 into the shroud holder 13 and/or to remove it from the shroud holder 13 .
- the shadow tube 2 is made of high-temperature-resistant, refractory material.
- the shroud tube 2 is used to discharge a metallic melt from the ladle 3 into a metallurgical processing device below, in particular into a distributor or a mold.
- the shroud 2 itself can be placed in a shroud sleeve 29 (see Fig figure 3 ) be stored made of metal, on which the gripping tool 27 detects the shadow tube 2.
- FIG 3 shows a perspective view of a second exemplary embodiment of a handling device 1 according to the invention for handling a shroud tube 2.
- This exemplary embodiment differs from that in FIG figure 1 shown embodiment only by the execution of the shroud holder 13 of the support arm 9 of the shroud manipulator 5.
- the shroud holder 13 is not ring-shaped in this case, but designed as a suspension for a shroud sleeve 29 of the shroud 2.
- the shroud sleeve 29 is pushed laterally into the shroud holder 13 for inserting the shroud tube 2, with the shroud sleeve 29 being gripped by the gripping tool 27 of the robot 7 as in FIG figure 3 shown is captured.
- the robot 7 is rigidly coupled to the shroud manipulator 5, or the robot 7 grips it directly Shadow tube 2 when this is arranged on the shadow tube manipulator 5.
- the coupling element 19 can be omitted.
- a robot 7 with more complex control software is then required.
- the inventive guidance of a shadow manipulator 5 by a robot 7 is a cost-effective retrofit solution for existing, manually operated shadow tube manipulators 5 that involves little installation effort, since in addition to the robot 7 itself there is only a signal connection to the shadow tube manipulator 5, as well as the optical position measuring system 6 and, if necessary, a coupling element 11 must be installed on the shadow tube manipulator 5.
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Manipulator (AREA)
Abstract
Die Erfindung betrifft eine Handhabungsvorrichtung (1) zum Handhaben eines Schattenrohrs (2) im Bereich einer Gießpfanne (3) mit einem zu dem Schattenrohr (2) korrespondierenden Gießpfannenauslass (4). Die Handhabungsvorrichtung (1) umfasst einen Schattenrohrmanipulator (5), an dem das Schattenrohr (2) anordenbar ist und mit dem das Schattenrohr (2) bewegbar und an die Gießpfanne (3) drückbar ist, ein Positionsmesssystem (6), das eingerichtet ist, eine Position des Gießpfannenauslasses (4) zu erfassen, und einen Roboter (7), der eingerichtet ist, den Schattenrohrmanipulator (5) durch direkten mechanischen Kontakt derart zu führen, dass das an dem Schattenrohrmanipulator (5) angeordnete Schattenrohr (2) an den Gießpfannenauslass (4) angestellt wird oder von dem Gießpfannenauslass (4) abgezogen wird.The invention relates to a handling device (1) for handling a shroud (2) in the area of a ladle (3) with a ladle outlet (4) corresponding to the shroud (2). The handling device (1) comprises a shroud manipulator (5) on which the shroud (2) can be arranged and with which the shroud (2) can be moved and pressed against the ladle (3), a position measuring system (6) which is set up to detect a position of the ladle outlet (4), and a robot (7) which is set up to guide the shroud manipulator (5) by direct mechanical contact in such a way that the shroud pipe (2) arranged on the shroud manipulator (5) touches the ladle outlet (4) is turned on or withdrawn from the ladle outlet (4).
Description
Die Erfindung betrifft eine Handhabungsvorrichtung und ein Verfahren zum Handhaben eines Schattenrohrs im Bereich einer Gießpfanne.The invention relates to a handling device and a method for handling a shroud in the area of a ladle.
Beim Stranggießen wird eine metallische Schmelze aus einer Gießpfanne in einen Verteiler, der auch als Tundish (engl.) bezeichnet wird, und anschließend aus dem Verteiler in eine Kokille oder direkt aus einer Gießpfanne in eine Kokille gegossen. An den gekühlten Kokillenwänden der Kokille erstarrt die Schmelze, so dass von der Kokille ein teilerstarrter Gießstrang mit einer erstarrten Strangschale und einem in der Regel noch flüssigen Kern ausgegeben wird, der anschließend weiter abgekühlt wird.In continuous casting, a molten metal is poured from a ladle into a tundish, and then from the tundish into a mold or directly from a ladle into a mold. The melt solidifies on the cooled mold walls of the mold, so that a partially solidified cast strand with a solidified strand shell and a usually still liquid core is discharged from the mold, which is then further cooled.
Aus der Gießpfanne wird die Schmelze dabei durch ein so genanntes Schattenrohr, das auch als Shroud (engl.) bezeichnet wird, in den Verteiler oder direkt in die Kokille geleitet, um zu verhindern, dass die Schmelze nach dem Verlassen der Gießpfanne mit dem Luftsauerstoff reagiert. Das Schattenrohr wird dabei in der Regel an einem so genannten Schattenrohrmanipulator, der auch als Ladle Shroud Manipulator (engl., abgekürzt LSM) bezeichnet wird, geführt. Ein Schattenrohrmanipulator wird häufig manuell bedient. Das manuelle Bedienen des Schattenrohrmanipulators ist eine teure und für den Bediener gefährliche Tätigkeit.The melt is fed from the ladle through a so-called shroud into the distributor or directly into the mold to prevent the melt from reacting with the oxygen in the air after leaving the ladle . The shroud is usually guided on what is known as a shroud manipulator, which is also referred to as a ladle shroud manipulator (LSM for short). A shadow tube manipulator is often operated manually. Operating the shadow tube manipulator manually is an expensive and dangerous job for the operator.
Der Erfindung liegt die Aufgabe zugrunde, das Handhaben eines Schattenrohrs zu automatisieren, insbesondere unter Verwendung eines manuell bedienbaren Schattenrohrmanipulators.The object of the invention is to automate the handling of a shroud, in particular using a manually operable shroud manipulator.
Die Aufgabe wird erfindungsgemäß durch eine Handhabungsvorrichtung mit den Merkmalen des Anspruchs 1 und ein Verfahren mit den Merkmalen des Anspruchs 15 gelöst.The object is achieved according to the invention by a handling device having the features of
Vorteilhafte Ausgestaltungen der Erfindung sind Gegenstand der Unteransprüche.Advantageous configurations of the invention are the subject matter of the dependent claims.
Eine erfindungsgemäße Handhabungsvorrichtung zum Handhaben eines Schattenrohrs im Bereich einer Gießpfanne mit einem zu dem Schattenrohr korrespondierenden Gießpfannenauslass umfasst
- einen Schattenrohrmanipulator, an dem das Schattenrohr anordenbar ist und mit dem das Schattenrohr bewegbar und an die Gießpfanne drückbar ist,
- ein Positionsmesssystem, das eingerichtet ist, eine Position des Gießpfannenauslasses zu erfassen, und
- einen Roboter, der eingerichtet ist, den Schattenrohrmanipulator durch direkten mechanischen Kontakt derart zu führen, dass das an dem Schattenrohrmanipulator angeordnete Schattenrohr an den Gießpfannenauslass angestellt wird oder von dem Gießpfannenauslass abgezogen wird.
- a shroud manipulator on which the shroud can be arranged and with which the shroud can be moved and pressed against the ladle,
- a position measurement system configured to detect a position of the ladle outlet, and
- a robot that is set up to guide the shroud manipulator by direct mechanical contact in such a way that the shroud arranged on the shroud manipulator is placed on the ladle outlet or withdrawn from the ladle outlet.
Die erfindungsgemäße Handhabungsvorrichtung ermöglicht eine mechanische Führung eines Schattenrohrmanipulators durch einen Roboter zum Anstellen des Schattenrohrs an einen Gießpfannenauslass vor einem Ausgießen metallischer Schmelze aus der Gießpfanne und Abziehen des Schattenrohrs von dem Gießpfannenauslass nach dem Ausgießen der Schmelze. Ein optisches Positionsmesssystem liefert dabei die von dem Roboter zum Führen des Schattenrohrmanipulators benötigte Position des Gießpfannenauslasses. Insbesondere kann die Handhabungsvorrichtung mit einem herkömmlichen, manuell bedienbaren Schattenrohrmanipulator realisiert werden.The handling device according to the invention enables mechanical guidance of a shroud manipulator by a robot for positioning the shroud at a ladle outlet before pouring metallic melt from the ladle and removing the shroud from the ladle outlet after pouring the melt. An optical position measuring system provides the position of the pouring ladle outlet required by the robot to guide the shroud manipulator. In particular, the handling device can be implemented with a conventional, manually operated shroud manipulator.
Dadurch kann ein derartiger Schattenrohrmanipulator kostengünstig und mit wenig Installationsaufwand zu einer erfindungsgemäßen Handhabungsvorrichtung mit einer automatisierten Bedienung des Schattenrohrmanipulators durch einen Roboter erweitert werden, da neben dem Roboter selbst lediglich das optische Positionsmesssystem sowie gegebenenfalls eine signaltechnische Verbindung zum Schattenrohrmanipulator, über die ein Antrieb des Schattenrohrmanipulators durch den Roboter steuerbar ist, und/oder ein Kuppelelement, an dem der Roboter den Schattenrohrmanipulator führen kann, installiert werden müssen.As a result, such a shroud manipulator can be expanded inexpensively and with little installation effort into a handling device according to the invention with automated operation of the shroud manipulator by a robot, since in addition to the robot itself only the optical position measuring system and, if necessary, a signaling connection to the shroud manipulator, via which a drive of the shroud manipulator by the robot can be controlled, and/or a coupling element on which the robot can guide the shadow tube manipulator must be installed.
Bei einer Ausgestaltung der erfindungsgemäßen Handhabungsvorrichtung weist der Schattenrohrmanipulator einen Tragarm auf, der durch einen Antrieb um eine Querachse schwenkbar ist und eine Schattenrohrhalterung für das Schattenrohr aufweist. Der Antrieb weist beispielsweise einen Hydraulikzylinder auf. Bei einer Weitergestaltung der vorgenannten Ausgestaltung der erfindungsgemäßen Handhabungsvorrichtung ist der Roboter eingerichtet, den Antrieb nach dem Anstellen des Schattenrohrs an den Gießpfannenauslass zu aktivieren und vor dem Abziehen des Schattenrohrs von dem Gießpfannenauslass zu deaktivieren.In one embodiment of the handling device according to the invention, the shroud manipulator has a support arm which can be pivoted about a transverse axis by a drive and has a shroud holder for the shroud. The drive has a hydraulic cylinder, for example. In a further development of the aforementioned embodiment of the handling device according to the invention, the robot is set up to activate the drive after positioning the shroud tube on the ladle outlet and to deactivate it before the shroud tube is pulled off the ladle outlet.
Durch die Schwenkbarkeit des Tragarms um die Querachse mittels des Antriebs kann das in der Schattenrohrhalterung angeordnete Schattenrohr bewegt und an den Gießpfannenauslass gedrückt werden. Das Andrücken des Schattenrohrs an den Gießpfannenauslass während des Ausgießens von Schmelze aus der Gießpfanne hat den Vorteil, dass das Schattenrohr in einfacher Weise nach dem Ausgießen der Schmelze von dem Gießpfannenauslass wieder abgezogen werden kann, und dass zum Halten des Schattenrohrs an dem Gießpfannenauslass keine störungs- und verschmutzungsanfällige Verschlussvorrichtung erforderlich ist. Zum Heben und Senken des Schattenrohrs und zum Andrücken des Schattenrohrs an den Gießpfannenauslass eignet sich aufgrund der dafür erforderlichen Hebekraft und Anstellkraft insbesondere ein Antrieb des Tragarms mit einem Hydraulikzylinder. Die Steuerung des Antriebs durch den Roboter ermöglicht eine vollständig automatisierte Handhabung des Schattenrohrs vor, während und nach dem Ausgießen von Schmelze aus der Gießpfanne.Due to the fact that the support arm can be pivoted about the transverse axis by means of the drive, the shroud tube arranged in the shroud tube holder can be moved and pressed against the pouring ladle outlet. The advantage of pressing the shroud tube against the pouring ladle outlet while the melt is being poured out of the ladle is that the shroud tube can easily be pulled off the pouring ladle outlet again after the melt has been poured out, and that no disruptive and dirt-prone locking device is required. A drive of the support arm with a hydraulic cylinder. Controlling the drive by the robot enables fully automated handling of the shroud tube before, during and after pouring melt from the pouring ladle.
Bei einer weiteren Ausgestaltung der erfindungsgemäßen Handhabungsvorrichtung ist der Roboter eingerichtet, das Schattenrohr in die Schattenrohrhalterung einzusetzen und/oder aus der Schattenrohrhalterung zu entnehmen.In a further embodiment of the handling device according to the invention, the robot is set up to insert the shroud into the shroud holder and/or to remove it from the shroud holder.
Gemäß der vorgenannten Ausgestaltung der erfindungsgemäßen Handhabungsvorrichtung wird der Roboter also vorteilhaft auch zum Bestücken des Schattenrohrmanipulators mit dem Schattenrohr und Entfernen des Schattenrohrs aus dem Schattenrohrmanipulator eingesetzt und kann mithin auch zum Austausch des Schattenrohrs verwendet werden.According to the aforementioned embodiment of the handling device according to the invention, the robot is also advantageously used to equip the shroud manipulator with the shroud tube and to remove the shroud tube from the shroud manipulator and can therefore also be used to replace the shroud tube.
Bei einer weiteren Ausgestaltung der erfindungsgemäßen Handhabungsvorrichtung ist der Tragarm des Schattenrohrmanipulators über ein Doppelgelenk mit zwei voneinander beabstandeten, zueinander parallelen Drehachsen bewegbar an einem Tragarmträger des Schattenrohrmanipulators gelagert. Insbesondere sind die Drehachsen vertikal ausgerichtet.In a further embodiment of the handling device according to the invention, the support arm of the shroud manipulator is movably mounted on a support arm carrier of the shroud manipulator via a double joint with two mutually parallel axes of rotation spaced apart. In particular, the axes of rotation are aligned vertically.
Durch das Doppelgelenk mit den beiden Drehachsen ist der Tragarm des Schattenrohrmanipulators durch den Roboter frei in einem durch die Länge des Tragarms definierten Bereich einer Ebene, die senkrecht zu den Drehachsen ist, insbesondere in einer horizontalen Ebene, verschiebbar.Due to the double joint with the two axes of rotation, the support arm of the shroud manipulator can be freely displaced by the robot in an area of a plane that is defined by the length of the support arm and is perpendicular to the axes of rotation, in particular in a horizontal plane.
Bei einer weiteren Ausgestaltung der erfindungsgemäßen Handhabungsvorrichtung ist der Tragarm des Schattenrohrmanipulators durch einen Motor um seine Längsachse drehbar.In a further embodiment of the handling device according to the invention, the support arm of the shroud manipulator can be rotated about its longitudinal axis by a motor.
Durch die motorisch antreibbare Drehbarkeit des Tragarms um dessen Längsachse kann das Schattenrohr an dem Tragarm verkippt werden. Diese Verkippbarkeit ist vorteilhaft, damit gegebenenfalls durch entsprechende Verkippungen verhindert wird, dass das Schattenrohr beim Anstellen an die Gießpfanne beziehungsweise beim Abziehen von der Gießpfanne mit mechanischen Hindernissen im Bereich der Gießpfanne kollidiert.Due to the motor-driven rotatability of the support arm about its longitudinal axis, the shadow tube can be tilted on the support arm. This tiltability is advantageous so that appropriate tilting, if necessary, prevents the shroud tube from colliding with mechanical obstacles in the region of the ladle when it is placed against the ladle or when it is pulled off the ladle.
Bei einer weiteren Ausgestaltung der erfindungsgemäßen Handhabungsvorrichtung ist an dem Schattenrohrmanipulator, beispielsweise an dessen Tragarm, ein Kuppelelement angeordnet, an dem der Roboter den Schattenrohrmanipulator kontaktiert. Beispielsweise ist das Kuppelelement kugelförmig ausgebildet und der Roboter weist ein Greifwerkzeug auf, das zum Greifen des Kuppelelements ausgebildet ist. Vorzugsweise greift das Greifwerkzeug das Kuppelelement mit einem Spiel im Bereich von 0,1 mm bis 0,5 mm. Das Kuppelelement ist beispielsweise aus einem gehärteten Metall gefertigt.In a further embodiment of the handling device according to the invention, a coupling element is arranged on the shroud manipulator, for example on its support arm, on which the robot makes contact with the shroud manipulator. For example, the coupling element is spherical and the robot has a gripping tool that is designed to grip the coupling element. The gripping tool preferably grips the coupling element with a play in the range of 0.1 mm to 0.5 mm. The coupling element is made of a hardened metal, for example.
Das Kuppelelement definiert den Angriffspunkt des Roboters an dem Schattenrohrmanipulator. Ein kugelförmiges Kuppelelement, das von einem Greifwerkzeug des Roboters mit einem Spiel greifbar ist, ermöglicht eine relative Verdrehbarkeit des Greifwerkzeugs gegenüber dem Kuppelelement beim Führen des Tragarms. Ein Spiel im Bereich von 0,1 mm bis 0,5 mm ermöglicht eine Positioniergenauigkeit von weniger als 1 mm beim Positionieren des an dem Schattenrohrmanipulator angeordneten Schattenrohrs an dem Gießpfannenauslass durch den Roboter. Diese Genauigkeit wird benötigt, um das Schattenrohr präzise genug an dem Gießpfannenauslass anzustellen.The coupling element defines the robot's point of attack on the shroud tube manipulator. A spherical coupling element, which can be gripped by a gripping tool of the robot with some play, allows the gripping tool to rotate relative to the coupling element when guiding the support arm. A clearance in the range of 0.1 mm to 0.5 mm enables a positioning accuracy of less than 1 mm when positioning the shroud tube arranged on the shroud manipulator at the ladle outlet by the robot. This accuracy is required in order to position the shroud tube precisely enough at the pouring ladle outlet.
Bei einer weiteren Ausgestaltung der erfindungsgemäßen Handhabungsvorrichtung ist der Schattenrohrmanipulator auf einem verfahrbaren Verfahrwagen angeordnet. Dadurch kann der Schattenrohrmanipulator mit dem Verfahrwagen erforderlichenfalls verschoben werden.In a further embodiment of the handling device according to the invention, the shroud manipulator is arranged on a movable carriage. This allows the shroud tube manipulator to be moved with the traversing carriage if necessary.
Bei einer weiteren Ausgestaltung der erfindungsgemäßen Handhabungsvorrichtung ist der Roboter als ein sechsachsiger Industrieroboter ausgebildet. Derartige Roboter sind heute relativ kostengünstig verfügbar und insbesondere in Verbindung mit dem oben genannten kugelförmigen Kuppelelement zum Führen des Schattenrohrmanipulators an dem Kuppelelement geeignet und ausreichend.In a further embodiment of the handling device according to the invention, the robot is designed as a six-axis industrial robot. Such robots are today available relatively inexpensively and, in particular in connection with the above-mentioned spherical coupling element, is suitable and sufficient for guiding the shroud manipulator on the coupling element.
Bei dem erfindungsgemäßen Verfahren zum Handhaben eines Schattenrohrs im Bereich einer Gießpfanne mit einer erfindungsgemäßen Handhabungsvorrichtung wird der Schattenrohrmanipulator dementsprechend von dem Roboter durch direkten mechanischen Kontakt derart gesteuert, dass das an dem Schattenrohrmanipulator angeordnete Schattenrohr vor einem Ausgießen von Schmelze aus der Gießpfanne an einen Gießpfannenauslass der Gießpfanne angestellt wird und nach dem Ausgießen der Schmelze von dem Gießpfannenauslass abgezogen wird.In the method according to the invention for handling a shroud pipe in the area of a ladle with a handling device according to the invention, the shroud pipe manipulator is accordingly controlled by the robot through direct mechanical contact in such a way that the shroud pipe arranged on the shroud pipe manipulator can reach a ladle outlet of the ladle before melt is poured out of the ladle is turned on and withdrawn from the pouring ladle outlet after the pouring of the melt.
Die oben beschriebenen Eigenschaften, Merkmale und Vorteile dieser Erfindung sowie die Art und Weise, wie diese erreicht werden, werden klarer und deutlicher verständlich im Zusammenhang mit der folgenden Beschreibung von Ausführungsbeispielen, die im Zusammenhang mit den Zeichnungen näher erläutert werden. Dabei zeigen:
-
FIG 1 eine perspektivische Darstellung eines ersten Ausführungsbeispiels einer erfindungsgemäßen Handhabungsvorrichtung zum Handhaben eines Schattenrohrs, -
FIG 2 eine perspektivische Darstellung des Schattenrohrmanipulators der inFigur 1 -
FIG 3 eine perspektivische Darstellung eines zweiten Ausführungsbeispiels einer erfindungsgemäßen Handhabungsvorrichtung zum Handhaben eines Schattenrohrs.
-
FIG 1 a perspective view of a first embodiment of a handling device according to the invention for handling a shadow tube, -
FIG 2 a perspective view of the shadow tube manipulator infigure 1 shown handling device, -
3 a perspective view of a second embodiment of a handling device according to the invention for handling a shadow tube.
Einander entsprechende Teile sind in den Figuren mit denselben Bezugszeichen versehen.Corresponding parts are provided with the same reference symbols in the figures.
Der Tragarm 9 weist eine Schattenrohrhalterung 13 auf, in die das Schattenrohr 2 einsetzbar ist. Die Schattenrohrhalterung 13 bildet ein Ende des Tragarms 9. Der Tragarm 9 ist über ein Doppelgelenk 15 mit zwei voneinander beabstandeten vertikalen Drehachsen V1, V2, die zueinander parallel und senkrecht zu der Querachse H sind, bewegbar an einem Tragarmträger 17 des Schattenrohrmanipulators 5 gelagert.The
Ferner ist der Tragarm 9 durch einen (nicht dargestellten) Motor um seine Längsachse L drehbar.Furthermore, the
An dem Tragarm 9 ist ein Kuppelelement 19 montiert, an dem der Roboter 7 den Schattenrohrmanipulator 5 kontaktiert, um den Tragarm 9 zu bewegen. Das Kuppelelement 19 ist an einem Kuppelelementträger 21 angeordnet, der an dem Tragarm 9 befestigt ist. Das Kuppelelement 19 ist kugelförmig ausgebildet und aus einem gehärteten Metall gefertigt.A
Der Schattenrohrmanipulator 5 ist auf einem verschiebbaren Verfahrwagen 22 angeordnet und somit mit dem Verfahrwagen 22 verfahrbar.The
Ferner weist der Schattenrohrmanipulator 5 eine (in
Der Schattenrohrmanipulator 5 kann ferner eine Argonzuführung zur Schattenrohrhalterung 13 aufweisen, mittels welcher während des Ausgießens von Schmelze aus der Gießpfanne 3 Argon automatisch aus einer ringförmig um eine Kontaktstelle des Schattenrohrs mit dem Gießpfannenauslass 4 verlaufenden Ringdüse abgegeben wird, um an diesem mechanischen Übergang mögliche Oxidationsvorgänge (beispielsweise durch eine unvollständige Abdichtung) zu unterbinden und Verstopfungen des Schattenrohrs 2 vorzubeugen. Beispielsweise ist ein mechanischer Klappmechanismus an dem Tragarm 9 angeordnet, der beim Einsetzen des Schattenrohrs 2 in die Schattenrohrhalterung 13 die Ringdüse automatisch in eine Arbeitsposition klappt.The
Der Roboter 7 ist als ein sechsachsiger Industrieroboter ausgebildet und ortsfest auf einem Pfannengießerpodest 25 (engl. Ladle Operator Platform) angeordnet. Beispielsweise weist der Roboter 7 eine Hebekraft von wenigstens 3 kN auf.The
Der Roboter 7 weist ein auswechselbares Greifwerkzeug 27 auf, das zum Greifen des Kuppelelements 19 ausgebildet ist, um den Tragarm 9 des Schattenrohrmanipulators 5 an dem Kuppelelement 19 zu führen. Das Greifwerkzeug 27 greift das Kuppelelement 19 mit einem Spiel im Bereich von 0,1 mm bis 0,5 mm. Dadurch wird einerseits eine relative Verdrehbarkeit des Greifwerkzeugs 27 gegenüber dem Kuppelelement 19 beim Führen des Tragarms 9 ermöglicht, andererseits aber auch eine Positioniergenauigkeit von weniger als 1 mm beim Positionieren des in der Schattenrohrhalterung 13 angeordneten Schattenrohrs 2 an dem Gießpfannenauslass 4 durch den Roboter 7 erreicht, wenn der Roboter 7 den Tragarm 9 an dem Kuppelelement 19 zu dem Gießpfannenauslass 4 führt.
Das Positionsmesssystem 6 ist eingerichtet, eine Position des Gießpfannenauslasses 4 zu erfassen und dem Roboter 7 bereitzustellen. Zu diesem Zweck weist das Positionsmesssystem 6 ein Stereokamerasystem auf, aus dessen Kamerabildern die Position ermittelt wird. Insbesondere ist eine Bestimmung der Position des Gießpfannenauslasses 4 mit einer Genauigkeit von weniger als 1 mm erforderlich. Um die Position des Gießpfannenauslasses 4 mit dieser Genauigkeit zu bestimmen, werden in der Nähe des Gießpfannenauslasses 4 beispielsweise so genannte Targetplatten mit optischen Markierungen montiert. Die genaue Bestimmung der Position des Gießpfannenauslasses 4 bei jedem Ausgießen von Schmelze aus der Gießpfanne 3 ist erforderlich, da die Gießpfanne 3 und der Verfahrwagen 22 zwar für jeden Ausgießvorgang jeweils in definierte Positionen gefahren werden, die Positionierung dieser Gewerke jedoch aufgrund deren bewegten Massen von beispielsweise mehreren hundert Tonnen nicht mit der genannten Genauigkeit möglich ist. Zum Anstellen des Schattenrohrs 2 an den Gießpfannenauslass 4 durch den Roboter 7, werden diese sich wiederholende Grobposition des Gießpfannenauslasses 4 und der Verfahrweg dorthin von einer Anfangsposition dem Roboter 7 in bekannter Weise eingelernt (so genanntes Teaching), wenn der Roboter 7 auf dem Pfannengießerpodest 25 installiert wird beziehungsweise wenn eine neue räumliche Gießbühnenkonfiguration festgelegt wird. Durch eine Feinjustierung anhand der mittels des Positionsmesssystems 6 ermittelten Position des Gießpfannenauslasses 4 kann das Schattenrohr 2 dann durch den Roboter 7 bei jedem Ausgießvorgang zuverlässig mit der erforderlichen Genauigkeit an den Gießpfannenauslass 4 angestellt werden.The
Durch das Doppelgelenk 15 mit den beiden vertikalen Drehachsen V1, V2 ist der Tragarm 9 des Schattenrohrmanipulators 5 frei in einem durch die Länge des Tragarms 9 definierten Bereich einer horizontalen Ebene verschiebbar. Durch die Schwenkbarkeit des Tragarms 9 um die Querachse H mittels des Antriebs 10 mit dem Hydraulikzylinder 11 kann das in der Schattenrohrhalterung 13 angeordnete Schattenrohr 2 vertikal bewegt und an den Gießpfannenauslass 4 gedrückt werden. Durch die motorisch antreibbare Drehbarkeit des Tragarms 9 um dessen Längsachse L kann das Schattenrohr 2 außerdem gegen die vertikale Richtung verkippt werden. Diese Verkippbarkeit ist vorteilhaft, damit gegebenenfalls durch entsprechende Verkippungen verhindert wird, dass das Schattenrohr 2 beim Anstellen an die Gießpfanne 3 beziehungsweise beim Abziehen von der Gießpfanne 3 mit mechanischen Hindernissen im Bereich der Gießpfanne 3 kollidiert. Der Schattenrohrmanipulator 5 kann prinzipiell auch manuell von einem menschlichen Bediener bedient werden. Dabei erfordert die Verschiebung des Tragarms 9 in der horizontalen Ebene nur minimalen Kraftaufwand und kann manuell von dem Bediener bewirkt werden, während das Schwenken des Tragarms 9 um die Querachse H durch den Antrieb 10 mit dem Hydraulikzylinder 11 und das Drehen des Tragarms 9 um dessen Längsachse L durch den Motor bewirkt werden, wobei der Antrieb 10 und der Motor von dem Bediener aktiviert werden.Due to the double joint 15 with the two vertical axes of rotation V1, V2, the
Durch den Roboter 7 wird der Tragarm 9 an dem Kuppelelement 19 lediglich zu dem Gießpfannenauslass 4 hin beziehungsweise von dem Gießpfannenauslass 4 weg geführt. Beim Ausgießen von Schmelze aus der Gießpfanne 3 wird das Schattenrohr 2 permanent durch den Antrieb 10 mit dem Hydraulikzylinder 11 mit einer Anstellkraft an den Gießpfannenauslass 4 gedrückt. Der Roboter 7 aktiviert dazu nach dem Anstellen des Schattenrohrs 2 an den Gießpfannenauslass 4 den Antrieb 10 und deaktiviert den Antrieb 10 vor dem Abziehen des Schattenrohrs 2 von dem Gießpfannenauslass 4. Während des Ausgießens der Schmelze kann der Roboter 7 von dem Schattenrohrmanipulator 5 entkoppelt werden, um mit dem Roboter 7 gegebenenfalls andere Aufgaben zu verrichten. Das permanente Andrücken des Schattenrohrs 2 an den Gießpfannenauslass 4 während des Ausgießens von Schmelze aus der Gießpfanne 3 hat den Vorteil, dass das Schattenrohr 2 in einfacher Weise von dem Gießpfannenauslass 4 wieder abgezogen werden kann und zum Halten des Schattenrohrs 2 an dem Gießpfannenauslass 4 keine mechanische Verschlussvorrichtung erforderlich ist, die störungs- und verschmutzungsanfällig ist.The
Ferner kann der Roboter 7 erforderlichenfalls den Motor zum Drehen des Tragarms 9 um dessen Längsachse L aktivieren. Zum Aktivieren und Deaktivieren des Antriebs 10 und des Motors weist der Roboter 7 eine kabelgebundene oder kabellose signaltechnische Verbindung mit Steuerungen des Antriebs 10 und des Motors auf, um entsprechende Steuersignale an die Steuerungen zu senden.Furthermore, the
Der Hydraulikzylinder 11 ist in allgemeinen, aus dem Stand der Technik bekannten manuell bedienbaren Installationen sowie in einer bevorzugten Ausführung der Erfindung nicht geregelt, um den Tragarm 9 auszubalancieren. Daher muss ein menschlicher Bediener in dieser Konfiguration manuell Gegengewichte anbringen beziehungsweise entfernen, wenn sich die Last am Tragarm 9 nennenswert ändert, beispielsweise wenn das Schattenrohr 2 nach einem Ausgießvorgang aufgrund von Verstopfungen schwerer geworden ist oder ein neues Schattenrohr 2 eingehängt wurde, oder nachdem ein verbrauchtes Schattenrohr 2 in eine Abfallsenke entsorgt wurde. Durch den Roboter 7 können derartige Laständerungen jedoch problemlos ohne Gegengewichte abgefangen werden. Vorteilhaft an der erfindungsgemäßen robotergestützten Führung des Schattenrohrmanipulators 2 ist somit auch, dass auf eine aufwändige Regelung des Hydraulikzylinders 11 verzichtet werden kann, welche beispielsweise auch die Verwendung von Proportionalventilen und Positionssensoren zur Erfassung der momentanen Lage des Tragarms 9 erfordern könnte.The
Der Roboter 7 ist ferner eingerichtet, das Schattenrohr 2 in die Schattenrohrhalterung 13 einzusetzen und/oder aus der Schattenrohrhalterung 13 zu entnehmen.The
Das Schattenrohr 2 ist aus hochtemperaturbeständigem, feuerfestem Material gefertigt. Das Schattenrohr 2 dient der Ausleitung einer metallischen Schmelze aus der Gießpfanne 3 in eine darunter liegende metallurgische Verarbeitungsvorrichtung, insbesondere in einen Verteiler oder eine Kokille. Um das spröde Material des Schattenrohrs 2 durch das Greifwerkzeug 27 des Roboters 7 beim Einsetzen in die Schattenrohrhalterung 13 oder Entfernen aus der Schattenrohrhalterung 13 nicht zu beschädigen, kann das Schattenrohr 2 selbst in einer Schattenrohrmanschette 29 (siehe
Bei alternativen Ausführungen der Handhabungsvorrichtung 1 wird der Roboter 7 starr mit dem Schattenrohrmanipulator 5 gekoppelt oder der Roboter 7 greift direkt an dem Schattenrohr 2 an, wenn dieses an dem Schattenrohrmanipulator 5 angeordnet ist. Bei derartigen Ausführungen kann das Kuppelelement 19 entfallen. Jedoch wird dann ein Roboter 7 mit einer komplexeren Steuersoftware benötigt.In alternative versions of the
Die erfinderische Führung eines Schattenmanipulators 5 durch einen Roboter 7 ist eine kostengünstige und mit wenig Installationsaufwand verbundene Nachrüstlösung für bestehende, manuell bedienbare Schattenrohrmanipulatoren 5, da neben dem Roboter 7 selbst lediglich eine signaltechnische Verbindung zum Schattenrohrmanipulator 5, sowie das optische Positionsmesssystem 6 und gegebenenfalls ein Kuppelelement 11 an dem Schattenrohrmanipulator 5 installiert werden müssen.The inventive guidance of a
- 11
- Handhabungsvorrichtunghandling device
- 22
- Schattenrohrshadow tube
- 33
- Gießpfanneladle
- 44
- Gießpfannenauslassladle outlet
- 55
- SchattenrohrmanipulatorShadow Tube Manipulator
- 66
- Positionsmesssystemposition measurement system
- 77
- Roboterrobot
- 99
- TragarmBeam
- 1010
- Antriebdrive
- 1111
- Hydraulikzylinderhydraulic cylinder
- 1313
- Schattenrohrhalterungshadow tube mount
- 1515
- Doppelgelenkdouble joint
- 1717
- Tragarmträgersupport arm carrier
- 1919
- Kuppelelementdome element
- 2121
- Kuppelelementträgercoupling element carrier
- 2222
- Verfahrwagencarriage
- 2323
- Haltevorrichtungholding device
- 2424
- Einrastvorrichtungsnap-in device
- 2525
- PfannengießerpodestLadle Podium
- 2727
- Greifwerkzeuggripping tool
- 2929
- SchattenrohrmanschetteShadow Tube Cuff
- HH
- Querachsetransverse axis
- LL
- Längsachselongitudinal axis
- V1, V2V1, V2
- Drehachseaxis of rotation
Claims (15)
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202011190573.7A CN112247134B (en) | 2020-10-30 | 2020-10-30 | Device and method for operating a shielding tube |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| EP3991876A1 true EP3991876A1 (en) | 2022-05-04 |
Family
ID=74268474
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP21198254.1A Pending EP3991876A1 (en) | 2020-10-30 | 2021-09-22 | Method and device for handling a ladle shroud |
Country Status (2)
| Country | Link |
|---|---|
| EP (1) | EP3991876A1 (en) |
| CN (1) | CN112247134B (en) |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20140125164A (en) * | 2013-04-18 | 2014-10-28 | 주식회사 포스코 | Apparatus for controlling nozzle |
| CN109570483A (en) * | 2018-11-29 | 2019-04-05 | 杨进 | A kind of continuous-casting steel pouring special manipulator of robot guidance |
| CN110625106A (en) | 2019-10-11 | 2019-12-31 | 宝钢工程技术集团有限公司 | Robot-guided continuous casting automatic steel pouring device and method of use thereof |
| CN110653365A (en) | 2019-10-11 | 2020-01-07 | 宝钢工程技术集团有限公司 | Automatic continuous casting device and using method thereof |
| CN111168051A (en) * | 2020-01-04 | 2020-05-19 | 鞍钢股份有限公司 | Unmanned system for ladle pouring area and operation method thereof |
Family Cites Families (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3179251B2 (en) * | 1993-07-02 | 2001-06-25 | 品川白煉瓦株式会社 | Immersion nozzle automatic changer |
| CN203917902U (en) * | 2014-07-17 | 2014-11-05 | 上海耀秦冶金设备技术有限公司 | Continuous casting steel ladle long spout manipulator |
| CN206065401U (en) * | 2016-10-13 | 2017-04-05 | 武汉钢铁股份有限公司 | A kind of mechanical hand changed for the big water-coating port of continuous casting |
| CN107020370A (en) * | 2017-06-05 | 2017-08-08 | 大连华锐重工集团股份有限公司 | Supermatic ladle long nozzle steerable system |
| CN108941526A (en) * | 2018-10-15 | 2018-12-07 | 哈尔滨博实自动化股份有限公司 | A kind of long nozzle robot of the intelligent automation operation on continuous casting platform |
| CN209174850U (en) * | 2018-10-15 | 2019-07-30 | 宝钢工程技术集团有限公司 | A device for locating the ladle drain using machine vision |
-
2020
- 2020-10-30 CN CN202011190573.7A patent/CN112247134B/en active Active
-
2021
- 2021-09-22 EP EP21198254.1A patent/EP3991876A1/en active Pending
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20140125164A (en) * | 2013-04-18 | 2014-10-28 | 주식회사 포스코 | Apparatus for controlling nozzle |
| CN109570483A (en) * | 2018-11-29 | 2019-04-05 | 杨进 | A kind of continuous-casting steel pouring special manipulator of robot guidance |
| CN110625106A (en) | 2019-10-11 | 2019-12-31 | 宝钢工程技术集团有限公司 | Robot-guided continuous casting automatic steel pouring device and method of use thereof |
| CN110653365A (en) | 2019-10-11 | 2020-01-07 | 宝钢工程技术集团有限公司 | Automatic continuous casting device and using method thereof |
| CN111168051A (en) * | 2020-01-04 | 2020-05-19 | 鞍钢股份有限公司 | Unmanned system for ladle pouring area and operation method thereof |
Also Published As
| Publication number | Publication date |
|---|---|
| CN112247134A (en) | 2021-01-22 |
| CN112247134B (en) | 2022-06-28 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| AT502058B1 (en) | CONTINUITY CASTING SYSTEM WITH AT LEAST ONE MULTIFUNCTION ROBOT | |
| DE2709727C3 (en) | Device for replacing pouring pipes on pouring vessels during continuous casting | |
| EP0592365A1 (en) | Process and apparatus for controlling the movement of a casting ladle in a casting plant | |
| WO2005118182A1 (en) | Continuous casting plant comprising at least one robot, and method for the operation of a continuous casting plant by incorporating at least one robot | |
| AT506190B1 (en) | DEVICE FOR INTERCHANGEABLE CONNECTION OF A PIPING TUBE TO AN OUTLET OF A MELT CONTAINER | |
| DE2250695A1 (en) | DEVICE FOR SLAGING DOWN POURS | |
| WO1999000205A1 (en) | Method and device for controlling the movement of a teeming ladle having a low teeming height in a teeming installation | |
| DE2753161C3 (en) | Method and device for changing measuring and / or sampling probes for molten steel | |
| EP3991876A1 (en) | Method and device for handling a ladle shroud | |
| DE2738587C2 (en) | Adjustment device for a shielding device to protect the pouring stream | |
| DE2430786A1 (en) | ROTATING DEVICE FOR TRANSPORTING STEEL CASTING PANS | |
| EP3993923B1 (en) | Device for manipulating a spout at an exchange device at the outlet of a metallurgical container | |
| DE2737571A1 (en) | DEVICE FOR SUCTION OF SLAG O.DGL. | |
| DE2146221C3 (en) | Pouring device | |
| DE1284577B (en) | Device for emptying stopper pans containing liquid metal | |
| EP0029820B1 (en) | Device for withdrawing and inserting a starter bar in a continuous casting plant | |
| EP0073537A1 (en) | Smoke elbow support for an electric arc furnace | |
| EP3649418A1 (en) | Guiding a probe | |
| DE2905752A1 (en) | Electrode clamp foe electroslag remelting plant - where clamp includes tilting devices which maintain electrode at correct distance from mould walls | |
| DE2510497C2 (en) | Purification device | |
| DE3818000A1 (en) | Installation for treating molten metals | |
| DE3015694A1 (en) | Torpedo ladle refractory lining breaking-up mechanism - has rigid arm supporting tool on portal chassis fitting over bogie | |
| DE29813629U1 (en) | Manipulator for operating processes with particularly high heat development | |
| DE202023106984U1 (en) | Installation, robot and head for atomizing a product in an interior of a container suitable for containing molten metal | |
| EP0043364B1 (en) | Device for introducing a flexible starter bar into a continuous casting machine |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: THE APPLICATION HAS BEEN PUBLISHED |
|
| AK | Designated contracting states |
Kind code of ref document: A1 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: REQUEST FOR EXAMINATION WAS MADE |
|
| 17P | Request for examination filed |
Effective date: 20221104 |
|
| RBV | Designated contracting states (corrected) |
Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| RAP3 | Party data changed (applicant data changed or rights of an application transferred) |
Owner name: PRIMETALS TECHNOLOGIES AUSTRIA GMBH |