EP3865032A1 - Système de préparation d'aliments, procédé de commande d'un système de préparation d'aliments et programme - Google Patents
Système de préparation d'aliments, procédé de commande d'un système de préparation d'aliments et programme Download PDFInfo
- Publication number
- EP3865032A1 EP3865032A1 EP19872123.5A EP19872123A EP3865032A1 EP 3865032 A1 EP3865032 A1 EP 3865032A1 EP 19872123 A EP19872123 A EP 19872123A EP 3865032 A1 EP3865032 A1 EP 3865032A1
- Authority
- EP
- European Patent Office
- Prior art keywords
- cooking
- area
- user
- task
- unit
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 238000000034 method Methods 0.000 title claims abstract description 160
- 235000013305 food Nutrition 0.000 title description 7
- 238000002360 preparation method Methods 0.000 title description 4
- 238000010411 cooking Methods 0.000 claims abstract description 845
- 230000008569 process Effects 0.000 claims abstract description 111
- 230000009471 action Effects 0.000 claims description 68
- 238000001514 detection method Methods 0.000 claims description 32
- 238000005516 engineering process Methods 0.000 abstract description 25
- 230000006870 function Effects 0.000 description 108
- 238000010586 diagram Methods 0.000 description 103
- 238000012545 processing Methods 0.000 description 103
- 235000012041 food component Nutrition 0.000 description 84
- 239000005417 food ingredient Substances 0.000 description 84
- 230000033001 locomotion Effects 0.000 description 75
- 238000007726 management method Methods 0.000 description 55
- 230000002093 peripheral effect Effects 0.000 description 32
- 238000004891 communication Methods 0.000 description 27
- 238000005520 cutting process Methods 0.000 description 25
- 230000004044 response Effects 0.000 description 25
- 238000005406 washing Methods 0.000 description 23
- XLYOFNOQVPJJNP-UHFFFAOYSA-N water Substances O XLYOFNOQVPJJNP-UHFFFAOYSA-N 0.000 description 23
- 238000013461 design Methods 0.000 description 20
- 235000021186 dishes Nutrition 0.000 description 20
- 238000004458 analytical method Methods 0.000 description 18
- 230000008859 change Effects 0.000 description 16
- 244000061456 Solanum tuberosum Species 0.000 description 15
- 235000002595 Solanum tuberosum Nutrition 0.000 description 15
- 239000004615 ingredient Substances 0.000 description 15
- 238000013459 approach Methods 0.000 description 14
- 235000011194 food seasoning agent Nutrition 0.000 description 13
- 239000002699 waste material Substances 0.000 description 13
- 238000003780 insertion Methods 0.000 description 11
- 230000037431 insertion Effects 0.000 description 11
- 241000972773 Aulopiformes Species 0.000 description 10
- 235000019515 salmon Nutrition 0.000 description 10
- 238000013500 data storage Methods 0.000 description 9
- 239000002184 metal Substances 0.000 description 9
- 235000013311 vegetables Nutrition 0.000 description 9
- 230000001276 controlling effect Effects 0.000 description 8
- 238000010438 heat treatment Methods 0.000 description 8
- 235000019640 taste Nutrition 0.000 description 8
- 240000008415 Lactuca sativa Species 0.000 description 7
- 239000002775 capsule Substances 0.000 description 7
- 230000035622 drinking Effects 0.000 description 7
- 235000012045 salad Nutrition 0.000 description 7
- 239000000779 smoke Substances 0.000 description 7
- 239000004278 EU approved seasoning Substances 0.000 description 6
- 239000008157 edible vegetable oil Substances 0.000 description 6
- 230000007246 mechanism Effects 0.000 description 6
- 238000002156 mixing Methods 0.000 description 6
- 230000000391 smoking effect Effects 0.000 description 6
- 229910001220 stainless steel Inorganic materials 0.000 description 6
- 239000010935 stainless steel Substances 0.000 description 6
- 230000014509 gene expression Effects 0.000 description 5
- 235000012015 potatoes Nutrition 0.000 description 5
- 238000003860 storage Methods 0.000 description 5
- 239000011248 coating agent Substances 0.000 description 4
- 238000000576 coating method Methods 0.000 description 4
- 238000001816 cooling Methods 0.000 description 4
- 239000006071 cream Substances 0.000 description 4
- 230000005611 electricity Effects 0.000 description 4
- 239000011521 glass Substances 0.000 description 4
- 230000012447 hatching Effects 0.000 description 4
- 239000007788 liquid Substances 0.000 description 4
- 235000008390 olive oil Nutrition 0.000 description 4
- 239000004006 olive oil Substances 0.000 description 4
- 239000011347 resin Substances 0.000 description 4
- 229920005989 resin Polymers 0.000 description 4
- 235000014347 soups Nutrition 0.000 description 4
- 238000004659 sterilization and disinfection Methods 0.000 description 4
- 230000001133 acceleration Effects 0.000 description 3
- 230000004397 blinking Effects 0.000 description 3
- 239000000919 ceramic Substances 0.000 description 3
- 238000004040 coloring Methods 0.000 description 3
- 239000000463 material Substances 0.000 description 3
- 235000013372 meat Nutrition 0.000 description 3
- 239000004925 Acrylic resin Substances 0.000 description 2
- 229920000178 Acrylic resin Polymers 0.000 description 2
- 238000013473 artificial intelligence Methods 0.000 description 2
- 235000008429 bread Nutrition 0.000 description 2
- 238000004140 cleaning Methods 0.000 description 2
- 239000003086 colorant Substances 0.000 description 2
- 230000008878 coupling Effects 0.000 description 2
- 238000010168 coupling process Methods 0.000 description 2
- 238000005859 coupling reaction Methods 0.000 description 2
- 238000013523 data management Methods 0.000 description 2
- 230000000249 desinfective effect Effects 0.000 description 2
- 230000000694 effects Effects 0.000 description 2
- 230000007613 environmental effect Effects 0.000 description 2
- 238000010801 machine learning Methods 0.000 description 2
- 238000005259 measurement Methods 0.000 description 2
- 229920003217 poly(methylsilsesquioxane) Polymers 0.000 description 2
- 150000003839 salts Chemical class 0.000 description 2
- 239000012780 transparent material Substances 0.000 description 2
- 241000251468 Actinopterygii Species 0.000 description 1
- 241000287828 Gallus gallus Species 0.000 description 1
- 235000016838 Pomo dAdamo Nutrition 0.000 description 1
- 244000003138 Pomo dAdamo Species 0.000 description 1
- 235000013334 alcoholic beverage Nutrition 0.000 description 1
- 244000052616 bacterial pathogen Species 0.000 description 1
- 238000005452 bending Methods 0.000 description 1
- 235000013361 beverage Nutrition 0.000 description 1
- 230000005540 biological transmission Effects 0.000 description 1
- 230000036772 blood pressure Effects 0.000 description 1
- 230000037237 body shape Effects 0.000 description 1
- 238000009835 boiling Methods 0.000 description 1
- 230000006378 damage Effects 0.000 description 1
- 238000005034 decoration Methods 0.000 description 1
- 238000011161 development Methods 0.000 description 1
- 230000018109 developmental process Effects 0.000 description 1
- 238000001035 drying Methods 0.000 description 1
- 235000013399 edible fruits Nutrition 0.000 description 1
- 230000008451 emotion Effects 0.000 description 1
- 230000005057 finger movement Effects 0.000 description 1
- 235000019688 fish Nutrition 0.000 description 1
- 238000007710 freezing Methods 0.000 description 1
- 230000008014 freezing Effects 0.000 description 1
- 238000003384 imaging method Methods 0.000 description 1
- 230000002452 interceptive effect Effects 0.000 description 1
- 230000007774 longterm Effects 0.000 description 1
- 238000004519 manufacturing process Methods 0.000 description 1
- 238000013507 mapping Methods 0.000 description 1
- 235000012054 meals Nutrition 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 230000036651 mood Effects 0.000 description 1
- 239000010813 municipal solid waste Substances 0.000 description 1
- 239000003921 oil Substances 0.000 description 1
- 235000019198 oils Nutrition 0.000 description 1
- 230000003287 optical effect Effects 0.000 description 1
- 230000001151 other effect Effects 0.000 description 1
- 235000015927 pasta Nutrition 0.000 description 1
- 238000000053 physical method Methods 0.000 description 1
- 238000005057 refrigeration Methods 0.000 description 1
- 230000001105 regulatory effect Effects 0.000 description 1
- 230000033764 rhythmic process Effects 0.000 description 1
- 235000012046 side dish Nutrition 0.000 description 1
- 229910052710 silicon Inorganic materials 0.000 description 1
- 239000010703 silicon Substances 0.000 description 1
- 235000014214 soft drink Nutrition 0.000 description 1
- 238000010025 steaming Methods 0.000 description 1
- 238000003756 stirring Methods 0.000 description 1
- 239000008400 supply water Substances 0.000 description 1
- 235000015112 vegetable and seed oil Nutrition 0.000 description 1
- 239000008158 vegetable oil Substances 0.000 description 1
- 238000010792 warming Methods 0.000 description 1
Images

















































































Classifications
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47J—KITCHEN EQUIPMENT; COFFEE MILLS; SPICE MILLS; APPARATUS FOR MAKING BEVERAGES
- A47J36/00—Parts, details or accessories of cooking-vessels
- A47J36/32—Time-controlled igniting mechanisms or alarm devices
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J19/00—Accessories fitted to manipulators, e.g. for monitoring, for viewing; Safety devices combined with or specially adapted for use in connection with manipulators
- B25J19/06—Safety devices
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J19/00—Accessories fitted to manipulators, e.g. for monitoring, for viewing; Safety devices combined with or specially adapted for use in connection with manipulators
- B25J19/02—Sensing devices
- B25J19/04—Viewing devices
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Programme-controlled manipulators
- B25J9/16—Programme controls
- B25J9/1674—Programme controls characterised by safety, monitoring, diagnostic
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16P—SAFETY DEVICES IN GENERAL; SAFETY DEVICES FOR PRESSES
- F16P1/00—Safety devices independent of the control and operation of any machine
- F16P1/02—Fixed screens or hoods
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16P—SAFETY DEVICES IN GENERAL; SAFETY DEVICES FOR PRESSES
- F16P3/00—Safety devices acting in conjunction with the control or operation of a machine; Control arrangements requiring the simultaneous use of two or more parts of the body
- F16P3/001—Safety devices for guarding the human operator of punch presses or like machine tools performing an opening and closing travel
- F16P3/006—Safety devices for guarding the human operator of punch presses or like machine tools performing an opening and closing travel having a screen moving with the machine and moving the operator out of danger, or restraining the operator, without influencing the switching system
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16P—SAFETY DEVICES IN GENERAL; SAFETY DEVICES FOR PRESSES
- F16P3/00—Safety devices acting in conjunction with the control or operation of a machine; Control arrangements requiring the simultaneous use of two or more parts of the body
- F16P3/12—Safety devices acting in conjunction with the control or operation of a machine; Control arrangements requiring the simultaneous use of two or more parts of the body with means, e.g. feelers, which in case of the presence of a body part of a person in or near the danger zone influence the control or operation of the machine
- F16P3/14—Safety devices acting in conjunction with the control or operation of a machine; Control arrangements requiring the simultaneous use of two or more parts of the body with means, e.g. feelers, which in case of the presence of a body part of a person in or near the danger zone influence the control or operation of the machine the means being photocells or other devices sensitive without mechanical contact
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V20/00—Scenes; Scene-specific elements
- G06V20/10—Terrestrial scenes
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V40/00—Recognition of biometric, human-related or animal-related patterns in image or video data
- G06V40/20—Movements or behaviour, e.g. gesture recognition
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06N—COMPUTING ARRANGEMENTS BASED ON SPECIFIC COMPUTATIONAL MODELS
- G06N20/00—Machine learning
Definitions
- the present technology relates to a cooking system, a method for controlling a cooking system, and a program and in particular to a cooking system, a method for controlling a cooking system, and a program that enable a user to enjoy the pleasure and happiness of cooking by safely providing novel cooking experiences.
- Patent Literature 1 Japanese Patent Application Laid-open No. 2016-209991
- Patent Literature 1 the user cannot consciously avoid the contact with the robot arm because a mechanism that enables the user to predict movements of the robot arm is not provided.
- Patent Literature 1 As a result, even if the technology of Patent Literature 1 is applied to a smart kitchen, the user cannot be provided with a cooking experience in a state in which the safety is secured. Therefore, the user cannot intervene in the cooking with an easy mind and may not be able to fully enjoy the pleasure and happiness of the cooking through a new cooking experience.
- the present technology has been made in view of the above-mentioned circumferences for making it possible to cause a user to enjoy the pleasure and happiness of cooking by providing novel cooking experiences safely.
- a cooking system is a cooking system including: a cooking space state detection unit that detects a state of a cooking space; a dangerous area detection unit that detects a dangerous area for a user in the cooking space on the basis of a cooking process and the state of the cooking space; and an indication control unit that performs control to indicate the dangerous area detected by the dangerous area detection unit in the cooking space.
- a method for controlling a cooking system and a program according to an aspect of the present technology corresponds to the cooking system.
- the state of the cooking space is detected, the dangerous area for the user in the cooking space is detected on the basis of the cooking process and the state of the cooking space, and the control to indicate the detected dangerous area in the cooking space is performed.
- Fig. 1 is a perspective view showing a configuration example of the outer appearance of a robotic kitchen 1 according to an embodiment of the present technology.
- the robotic kitchen 1 is a cooking system including a computer that controls general operations using artificial intelligence (AI) and the like, a device of a drive system such as a cooking arm, and various sensors and having robotic functions to autonomously perform cooking.
- the robotic kitchen 1 is installed in a house, for example.
- the robotic kitchen 1 includes a housing 11 in a horizontally long rectangular parallelepiped shape.
- Various devices such as a computer are provided inside the housing 11 as the main body of the robotic kitchen 1.
- a cooking assistance system 31 is provided, erected from the upper surface of the housing 11.
- the cooking assistance system 31 is configured such that various cooking assistance units such as a refrigerator, a microwave oven, and storage are arranged. The details of respective units such as the cooking assistance unit will be described later.
- a groove is formed in a longitudinal direction in substantially the center of the housing 11.
- a rail is provided along the groove and cooking arms 51-1 to 51-4 are provided in the rail.
- the cooking arms 51-1 to 51-4 can be repositioned along the rail serving as a movement mechanism.
- the cooking arms 51-1 to 51-4 are robotic arms configured by connecting cylindrical members at joint portions. Various tasks such as cooking and cleaning are performed by the cooking arms 51-1 to 51-4.
- a space above a top plate 21A on the front side of the housing 11 is a cooking space in which the cooking arms 51-1 to 51-4 perform cooking.
- the cooking space is a generic term for a space in which the cooking arms 51-1 to 51-4 or a user performs cooking.
- the cooking space includes not only a space completely identical to the space in which the cooking arms 51-1 to 51-4 or the user performs cooking, but also a partial space included in such a space.
- the number of cooking arms is not limited to four.
- the cooking arms 51 when it is unnecessary to distinguish each of the cooking arms 51-1 to 51-4, they will be collectively referred to as the cooking arms 51 as necessary.
- Fig. 2 is a diagram showing a state of the cooking arms 51 performing a task.
- attachments having various cooking functions are attached to distal ends of the cooking arms 51.
- an attachment having a manipulator function (hand function) of gripping food ingredients and tableware, an attachment having a knife function of cutting food ingredients, an attachment having a mixer function of mixing liquid such as seasoning, and the like are prepared.
- a knife attachment which is an attachment having a knife function is attached to the cooking arm 51-1.
- a mass of meat placed on the top plate 21A is cut by using the knife attachment.
- a spindle attachment which is an attachment to be used for fixing or rotating a food ingredient is attached to the cooking arm 51-2.
- a peeler attachment which is an attachment having a peeler function of peeling a food ingredient is attached to the cooking arm 51-3.
- a potato lifted by the cooking arm 51-2 using the spindle attachment is peeled off by the cooking arm 51-3 using the peeler attachment. In this manner, it is also possible for the plurality of cooking arms 51 to perform one task in cooperation with each other.
- the manipulator attachment which is the attachment having the manipulator function is attached to the cooking arm 51-4.
- a frying pan in which chicken is put is transported to the cooking assistance unit having an oven function by using the manipulator attachment.
- the cooking with such cooking arms 51 is performed by replacing the attachments as appropriate in accordance with the contents of tasks.
- the attachments are also automatically replaced by the robotic kitchen 1.
- recipe data prepared for each dish for example.
- the recipe data also describes information indicating the operation of each cooking arm 51 in each task.
- the robotic kitchen 1 controls the operation of the respective units such as the cooking arm 51 and performs cooking in accordance with the description of the recipe data.
- the user can leave cooking that the user cannot do up to the robotic kitchen 1 by setting the degree of involvement to be lower.
- the dish means a thing made up after cooking.
- the cooking means a process of making a dish or an act of making a dish.
- Fig. 3 is a diagram showing a first example of the collaborative task.
- a state in which the user is cutting a potato with a knife is shown. Uncut potatoes are prepared near the potato that the user is cutting. The cooking arm 51-1 to which the knife attachment is attached stands by near the user.
- the knife used by the user and the food ingredients such as the potatoes are prepared by the cooking arms 51.
- the robotic kitchen 1 determines to perform the continuation of the cutting using the uncut potatoes as targets.
- the robotic kitchen 1 outputs a synthesized voice saying "Yes, sir”.
- the robotic kitchen 1 also has a function of learning the user's action, a function of recognizing what the user said and replying it, and the like.
- a camera for taking an image of the user's action, a microphone for detecting the voice, and a speaker for outputting the synthesized voice are provided at predetermined positions in the robotic kitchen 1.
- the cooking arm 51-1 takes over the cutting using the remaining potatoes as the targets as indicated by the arrow A2.
- the direction of the cutting, the width of the cutting, and the like are based on the manner of the user obtained by learning.
- a simple task such as cutting lots of the same kinds of food ingredients among the cooking tasks is a task that the user wishes to omit as much as possible. Since the robotic kitchen 1 learns the user's action and takes the same action as the user's action, the user does not need to perform such a simple task.
- Fig. 4 is a diagram showing a second example of the collaborative task.
- a state in which sliced baguette and smoked salmon are placed on the top plate 21A is shown.
- the preparation of the food ingredient, the slicing of the food ingredient, and the smoking of the salmon are performed by the cooking arms 51.
- the manipulator attachment is attached to the cooking arm 51-1.
- a piece of smoked salmon is lifted by the cooking arm 51-1 and transported toward the baguette.
- the baguette on which the smoked salmon is put is cooked.
- the baguette that is a completed dish is delivered to the user by the cooking arm 51-1 as indicated by the arrow A11. Moreover, a synthesized voice saying "Please have a taste” is output and the user is requested to have a taste.
- the user receives and tastes the delivered baguette.
- a task of placing the smoked salmon on the baguette is thereafter performed.
- the tasting is an important task among cooking tasks and is also a pleasant task for the user.
- the user can perform the pleasant task by himself or herself.
- Fig. 5 is a diagram showing a third example of the collaborative task.
- FIG. 5 a state in which a coating task of coating a sponge with cream is performed by the cooking arm 51-1 is shown.
- a spatula attachment having a spatula function is attached to the cooking arm 51-1.
- the sponge and the cream are prepared by the cooking arms 51.
- the user performs a task of decorating with the cream as the finishing task in response to the request from the robotic kitchen 1.
- the finishing task such as decoration with cream in making a cake and food presentation is performed by the user with creativity, and can be a pleasant task.
- the user can perform such a pleasant task by himself or herself.
- the cooking by the robotic kitchen 1 is performed in collaboration with the user as appropriate. Since the tasks are shared such that the robotic kitchen 1 performs simple tasks such as preparation, the user can perform only the pleasant task by himself or herself and leave the troublesome task up to the robotic kitchen 1.
- the user can obtain novel cooking experiences such as cooking in collaboration with the robotic kitchen 1.
- the user can also enjoy seeing the cooking arms 51 performing the tasks on the top plate 21A. If the cooking is performed inside the housing 11 and the completed dish comes out, such a kitchen can be regarded as a simple apparatus for manufacturing a dish, and it is convenient but lacking in interest.
- the robotic kitchen 1 can produce a space such as a room by the cooking task itself.
- the robotic kitchen 1 is an entertainment kitchen.
- Figs. 6 and 7 are diagrams showing the outer appearance of the robotic kitchen 1 on a sleep mode.
- Fig. 6 shows a state in which the robotic kitchen 1 on the sleep mode is viewed from the front
- Fig. 7 shows a state in which the robotic kitchen 1 on the sleep mode is viewed from the right front.
- the housing 11 in the horizontally long rectangular parallelepiped shape is provided on a columnar base portion 12 fixed to the floor.
- a space having a predetermined height is formed between the bottom surface of the housing 11 and the floor.
- the cooking assistance system 31 On the sleep mode, the cooking assistance system 31 is housed in the housing 11.
- the cooking assistance system 31 is provided at a position lower than a top plate unit 21.
- the top plate 21A and a top plate 21B constituting the top plate unit 21 are provided at the same height with a slight gap therebetween.
- the top plate 21A and the top plate 21B are provided in contact at the same height, and the upper surface of the housing 11 is thus a substantially flat surface.
- Fig. 8 is a diagram showing the outer appearance of the robotic kitchen 1 on an active mode.
- the cooking assistance system 31 ascends and the cooking assistance system 31 is erected on the rear side of the housing 11 as shown in Fig. 8 .
- the cooking assistance system 31 provided on the side of the bottom surface of the top plate 21B appears.
- the switching from the sleep mode to the active mode is performed at a predetermined timing such as a timing at which a preset cooking start time comes and a timing at which it is detected that a person who performs a collaborative task is present near the robotic kitchen 1.
- a predetermined timing such as a timing at which a preset cooking start time comes and a timing at which it is detected that a person who performs a collaborative task is present near the robotic kitchen 1.
- Such deformation of the robotic kitchen 1 is performed by electric power.
- Fig. 9 is a front view of the cooking assistance system 31.
- the front, rear, left, and right side surfaces surrounding the box-shaped cooking assistance system 31 are constructed by a transparent member such as a thermally insulative reinforced glass. The interior of the cooking assistance system 31 can be thus seen.
- the cooking assistance system 31 includes cooking assistance units 31-1 to 31-6.
- the cooking assistance units 31-1 to 31-6 are devices having functions of assisting the cooking of the robotic kitchen 1.
- the respective cooking assistance units are partitioned by thin plate-like members. Partitioned by two thin plate-like shelf boards, a space having vertically three stages is formed inside of each cooking assistance unit. For example, the front member slides open to allow access to each stage of each cooking assistance unit.
- the cooking assistance unit 31-1 is a device having a freezing function. In the cooking assistance unit 31-1, meat, fish, and the like are stored in a frozen state.
- the cooking assistance unit 31-2 is a device having a refrigeration function. In the cooking assistance unit 31-2, fruit, beverages, and the like are stored in a cooled state.
- the cooking assistance unit 31-3 is a device having a function of maintaining a low temperature state. Vegetables and the like are stored in the cooking assistance unit 31-3 in a low temperature state. For example, in the lower stage of the cooking assistance unit 31-3, the attachments to be attached to the cooking arms 51 and cooking tools (kitchen knives, chopping boards, peelers, spatulas, and like used by human) are housed. Since the attachments are housed in a low temperature state, the propagation of germs can be suppressed.
- the cooking assistance unit 31-4 functions as room temperature storage.
- the cooking assistance unit 31-4 stores bread, pasta, seasoning, and the like.
- the cooking assistance unit 31-4 also stores tableware, cutlery, and the like.
- the cooking assistance unit 31-5 is a device having a heat insulating function.
- the cooking assistance unit 31-5 stores soups, foods being thawed, foods being low-temperature cooked, and the like.
- the cooking assistance unit 31-6 is a device having an oven function.
- the cooking assistance unit 31-6 is used for performing cooking with heat such as baking bread and grilling meat.
- the cooking assistance units 31-1 to 31-6 are arranged such that the unit having a function of storing foods and the like at a lower temperature is located on the left side and the unit having a function of storing foods and the like at a higher temperature is located on the right side.
- a device for adjusting the temperature in each cooking assistance unit is provided at a predetermined position such as under each cooking assistance unit.
- the temperature in each unit is adjusted by sending cold air or hot air discharged by a temperature adjustment device.
- the cooking arms 51 appear on the front side of the cooking assistance system 31 as shown in Fig. 10 following the cooking assistance system 31.
- the cooking arms 51 are those housed in a groove portion which appears as the top plate 21B ascends.
- the width in a depth direction of the cooking assistance system 31 is, as shown in Fig. 10 , smaller than the width in a depth direction of the top plate 21B.
- the groove portion closed by the top plate 21B on the sleep mode appears as the top plate 21B ascends and the cooking arms 51 are activated from the groove portion.
- a groove portion 101 is, as shown by hatching in the cross-section of the side surface of the housing 11 of Fig. 10 , formed in the longitudinal direction of the housing 11 in the vicinity of the boundary between the top plate 21A and the top plate 21B.
- the length of the groove portion 101 is substantially the same length as the length of the longitudinal direction of the housing 11 except for wall surface portions having a predetermined width on the side of the left side surface and on the side of the right side surface.
- a rail 102 is provided along the side surface of the groove portion 101.
- the rail 102 is provided along the side surface on the front side of the groove portion 101 as shown by coloring. It can be also said that the groove portion 101 is formed along the rail 102.
- the cooking arm 51 is mounted to be movable along the rail 102.
- the groove portion 101 includes a set of the ultraviolet ray irradiation ports 111, the air jet ejection ports 112, and the water ejection ports 113 (see Fig. 13 for all of them) as the washing function, and a plurality of such sets is provided at predetermined intervals in the longitudinal direction of the groove portion 101.
- the set at the position at which the user has inserted the hands is driven to wash the hands.
- the tableware, the cutlery, the attachments to be attached to the cooking arms 51, and the like are also washed by using the washing function of the groove portion 101. Not only washing but also drying and disinfecting the tableware, the cutlery, and the attachments are performed in a manner similar to that of the hands of the person.
- the groove portion 101 is provided with a waste treatment function of treating waste such as trash generated at the time of cooking.
- waste scattered on the top plate 21A is swept by the cooking arms 51 and introduced into the groove portion 101.
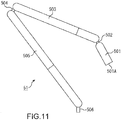
- Fig. 11 is a diagram showing the outer appearance of the cooking arm 51.
- the cooking arm 51 is generally configured by connecting thin cylindrical members with hinge portions serving as joint portions.
- Each hinge portion is provided with a motor and the like for generating force for driving each member.
- an attaching/detaching member 501 As the cylindrical members, an attaching/detaching member 501, a relay member 503, and a base member 505 are provided in order from the distal end.
- the attaching/detaching member 501 is a member having a length of substantially 1/5 of the length of the relay member 503.
- the length obtained by adding the length of the attaching/detaching member 501 to the length of the relay member 503 is substantially the same as the length of the base member 505.
- the attaching/detaching member 501 and the relay member 503 are connected to each other through a hinge portion 502 and the relay member 503 and the base member 505 are connected to each other through a hinge portion 504.
- the hinge portion 502 and the hinge portion 504 are provided at both ends of the relay member 503.
- the cooking arm 51 is constituted by the three cylindrical members in this example, the cooking arm 51 may be constituted by four or more cylindrical members. In this case, a plurality of relay members 503 is provided.
- An attaching/detaching portion 501A to/from which the attachment is attached and detached is provided at the distal end of the attaching/detaching member 501.
- the attaching/detaching member 501 has a attaching/detaching portion 501A to/from which one of the attachments having various cooking functions is attached and detached and functions as a cooking function arm portion that performs cooking by operating the attachment.
- the rear end of the base member 505 is provided with an attaching/detaching portion 506 which is attached to an arm movement unit 131 fitted in the rail 102.
- the base member 505 has an attaching/detaching portion 506 which is attached to the arm movement unit 131 and functions as a movement function arm portion that achieves the movement of the cooking arm 51.
- Fig. 12 is a diagram showing an example of a range of motion of each portion of the cooking arm 51.
- the attaching/detaching member 501 is rotatable about the central axis of the circular cross-section.
- the small flat circle shown in the center of the ellipse #1 indicates the direction of the rotational axis as the long dashed short dashed line.
- the range of rotation of the attaching/detaching member 501 is set as a range in which the pipe of the attachment is not detached in a case where the attachment is attached to the attaching/detaching portion 501A.
- the range of rotation is switched in a manner that depends on the attachment.
- the attaching/detaching member 501 is rotatable about an axis passing through a fitting portion 501B for the hinge portion 502.
- the relay member 503 is rotatable about an axis passing through a fitting portion 503A for the hinge portion 502.
- the two small circles shown inside the circle #2 indicate the direction of each rotational axis (direction perpendicular to the sheet).
- the range of motion of the attaching/detaching member 501 about the axis passing through the fitting portion 501B and the range of motion of the relay member 503 about the axis passing through the fitting portion 503A are each in the range of 90 degrees, for example.
- the relay member 503 is constituted by a member 503-1 on the distal end side and a member 503-2 on the rear end side. As shown surrounded by the ellipse #3, the relay member 503 is rotatable about the central axis of the circular cross-section at a coupling portion 503B between the member 503-1 and the member 503-2.
- the other movable portions also have a basically similar range of motion.
- the relay member 503 is rotatable about an axis passing through a fitting portion 503C for the hinge portion 504.
- the base member 505 is rotatable about an axis passing through a fitting portion 505A for the hinge portion 504.
- the base member 505 is constituted by a member 505-1 on the distal end side and a member 505-2 on the rear end side. As shown surrounded by the ellipse #5, the base member 505 is rotatable about the central axis of the circular cross-section at a coupling portion 505B between the member 505-1 and the member 505-2.
- the base member 505 is rotatable about an axis passing through a fitting portion 505C for the attaching/detaching portion 506.
- the attaching/detaching portion 506 is attached to the arm movement unit 131 to be rotatable about the central axis of the circular cross-section.
- the attaching/detaching member 501 having the attaching/detaching portion 501A at the distal end, the relay member 503 that connects the attaching/detaching member 501 and the base member 505 to each other, and the base member 505 having the rear end to which the attaching/detaching portion 506 is connected are rotatably connected to one another by the hinge portions.
- the movement of each movable portion is controlled by a controller in the robotic kitchen 1.
- Fig. 13 is a cross-sectional view showing the vicinity of the rail 102 in an enlarged state.
- the arm movement unit 131 is fitted in the rail 102 provided at the edge of the top plate 21A.
- Small grooves 102A and 102B are formed in the upper and lower surfaces of the rail 102 and rollers 131A and 131B provided in the upper and lower surfaces of the arm movement unit 131 are fitted in the grooves 102A and 102B.
- the distal end of the arm movement unit 131 is formed as a gentle curved face and an attaching/detaching portion 131C ( Fig. 14 ) is provided on the curved face.
- FIG. 13 the illustration of the pipe 132 is omitted.
- the pipe 132 passes through the inside of the arm movement unit 131 and is guided to the attaching/detaching portion 131C.
- the attaching/detaching portion 506 is inserted into the attaching/detaching portion 131C, the pipe 132 is connected to the pipe in the cooking arm 51.
- Fig. 14 is a diagram showing a movement direction of the arm movement unit 131.
- Fig. 14 a state of the arm movement unit 131 fitted in the rail 102 as viewed from the inside of the groove portion 101 is shown.
- the arm movement unit 131 moves horizontally along the rail 102.
- the arm movement unit 131 By moving the arm movement unit 131, it is possible to move the cooking arm 51 attached to the arm movement unit 131 to an arbitrary position. Not only the movement of each movable portion, but also the position of the cooking arm 51 are controlled by the controller in the robotic kitchen 1.
- Fig. 15 is a diagram showing a state in which the cooking arm 51 is attached and detached.
- the cooking arm 51 is attachable/detachable to/from the arm movement unit 131 fitted in the rail 102.
- the cooking arms 51 are individually sold. By additionally purchasing them, the user can increase the number of cooking arms 51 having the number of arm movement units 131 provided in the rail 102 as the upper limit.
- Fig. 16 is a diagram showing a function example of the cooking arm 51.
- the cooking arm 51 has a function of supplying electricity to the attachment.
- the attachment is driven by the electricity supplied from the cooking arm 51.
- the electricity supplied to the attachment is supplied to the cooking arm 51 via the rail 102, for example.
- the cooking arm 51 has a function of supplying heat or cold air to the attachment. For example, cooking with heat is performed in the attachment by using the heat supplied from the cooking arm 51. Moreover, the temperature adjustment of food ingredients is performed by using the cold air supplied from the cooking arm 51.
- the heat or cold air supplied to the attachment is generated in the arm function control device 133 and supplied to the cooking arm 51 via the pipe 132.
- the heat or cold air generated in the arm function control device 133 is transmitted to the cooking arm 51 by feeding compressed air or the like to the pipe 132 from the arm function control device 133.
- the cooking arm 51 has a function of supplying edible oil such as olive oil and vegetable oil to the attachment.
- edible oil supplied from the cooking arm 51 frying is performed in the attachment, for example.
- cooking such as sprinkling olive oil on ingredients is also performed.
- the edible oil supplied to the attachment is supplied to the cooking arm 51 from the arm function control device 133 via the pipe 132.
- the edible oil stored in the container provided inside the arm function control device 133 is supplied to the cooking arm 51 from the arm function control device 133 by flowing into the pipe 132.
- the cooking arm 51 has a function of supplying water to the attachment. For example, washing of food ingredients and washing of the top plate 21A are performed by using the water supplied from the cooking arm 51. The washing of the food ingredients and the washing of the top plate 21A are also tasks performed as cooking.
- the water supplied to the attachment is supplied to the cooking arm 51 from the arm function control device 133 via the pipe 132.
- Water drawn from a water pipe by the arm function control device 133 is supplied to the cooking arm 51 by flowing into the pipe 132.
- Temperature-regulated water may be supplied to the cooking arm 51 in the arm function control device 133.
- the cooking arm 51 has a function of supplying the air to the attachment.
- steam, smoke, or gas may be supplied to the attachment.
- steaming or disinfecting the top plate 21A and the attachments attached to the other cooking arms 51 is performed by using the steam supplied from the cooking arm 51.
- smoking is performed by the attachment by using the smoke supplied from the cooking arm 51.
- cooking with heat is performed by the attachment with flame using the gas supplied from the cooking arm 51.
- the air supplied to the attachment is supplied to the cooking arm 51 from the arm function control device 133 via the pipe 132.
- Steam or smoke generated in the arm function control device 133 is supplied to the cooking arm 51 by being fed with compressed air from the arm function control device 133 to the pipe 132.
- Gas drawn from a gas pipe by the arm function control device 133 is supplied to the cooking arm 51 from the arm function control device 133 by being fed into the pipe 132.
- the cooking arm 51 has a function of suctioning liquid or gas. Suction force generated in the arm function control device 133 is transmitted to the attachment through the pipe 132 and the cooking arm 51 and the liquid or gas at the suction port of the attachment is suctioned.
- the cooking arm 51 has at least one of the functions rather than having all of the functions shown in Fig. 16 .
- Fig. 17 is a diagram showing an example of an attaching/detaching mechanism of the attachment.
- a concave insertion hole 521 is formed in the center of the attaching/detaching portion 501A formed at the distal end of the attaching/detaching member 501 on the cooking arm 51 side.
- an attaching/detaching portion 611 is provided on an attachment 601 side.
- a convex protrusion is formed as an insertion portion 621 at the distal end of the attaching/detaching portion 611.
- a lock portion 521A provided in the insertion hole 521 is fitted in a groove portion 621A formed in the circumferential side surface of the insertion portion 621, such that the attachment 601 is fixed to the cooking arm 51.
- Insertion of the insertion portion 621 into the insertion hole 521 is guided by attraction of magnets provided on the attaching/detaching portion 501A side and the attaching/detaching portion 611 side, respectively.
- magnets 533-1 and 533-2 and magnets 633-1 and 633-2 are provided at corresponding positions on the attaching/detaching portion 501A side and the attaching/detaching portion 611 side, respectively.
- Fig. 18 shows a configuration of a contact surface between the attaching/detaching portion 501A and the attaching/detaching portion 611.
- a pipe 531 is provided in the innermost portion of the insertion hole 521. As shown in Fig. 18 , three pipes are provided on the upper side of the pipe 531 and three pipes are provided on the lower side of the pipe 531. Each pipe is disposed in each member constituting the cooking arm 51.
- a pipe 631 is provided in the tip end surface of the insertion portion 621. As shown in Fig. 18 , three pipes are provided on the upper side of the pipe 631 and three pipes are provided on the lower side of the pipe 631.
- the pipe 531 on the cooking arm 51 side and the pipe 631 on the attachment 601 side are used for suctioning liquid or gas as indicated by the arrow A71 in Fig. 17 .
- Pipes 532-1 and 532-2 on the cooking arm 51 side and pipes 632-1 and 632-2 on the attachment 601 side are used for supplying water as indicated by the arrows A72 in Fig. 17 , for example.
- pipes 532-3 and 532-4 on the cooking arm 51 side and pipes 632-3 and 632-4 on the attachment 601 side are used for supplying edible oil.
- Pipes 532-5 and 532-6 on the cooking arm 51 side and pipes 632-5 and 632-6 on the attachment 601 side are used for supplying gas.
- the supply of heat or cold air, the supply of steam, smoke, or gas, and the like are performed through the pipes 532-5 and 532-6 and pipes 632-5 and 632-6.
- Figs. 19 and 20 are diagrams showing a flow of attaching the attachment 601.
- the state of the cooking arm 51 immediately after it is activated is in the standby state as shown in the upper part of Fig. 19 . After it is determined to attach the attachment on the basis of the recipe data or the like, the driving of the cooking arm 51 is started as indicated by the arrow A81.
- the position of an attachment of the plurality of attachments housed in the cooking assistance unit 31-3, which is to be attached, is recognized.
- the position of each attachment is recognized by analyzing an image taken by a camera, for example.
- each attachment may be fixed.
- Each attachment is housed in the cooking assistance unit 31-3 in a state in which the attaching/detaching portion 611 is directed to the groove portion 101, for example.
- each portion of the cooking arm 51 is driven such that the attaching/detaching portion 501A comes close to the attaching/detaching portion 611 of the attachment 601 to be attached.
- the attachment 601 When the attaching/detaching portion 501A is moved close to the attaching/detaching portion 611 of the attachment 601, the attachment 601 is attached to the attaching/detaching portion 501A by attraction force of the magnets provided on the attaching/detaching portion 501A side and the attaching/detaching portion 611 side as indicated by the arrow A82.
- cooking using the attachment 601 can be performed as indicated by the arrow A83.
- cooking of mixing ingredients is performed by vibrating the attachment 601.
- the attachment 601 can be provided with various cooking functions by connection between the pipe on the attachment 601 side and the pipe on the cooking arm 51 side when the attachment 601 is attached.
- a cooking unit 612 that achieves the cooking functions.
- the operation of the cooking unit 612 is switched as appropriate in accordance with the state of the user who performs the collaborative task.
- the configuration of the cooking unit 612 differs in a manner that depends on the type of attachment.
- connection of the pipes has been mainly described in the example of Figs. 17 and 18 , configurations and the like for connecting a cable for supplying electricity and signal lines for supplying various control signals to the attachment 601 side are provided on the cooking arm 51 side and the attachment 601 side, respectively.
- the cooking unit 612 is connected to the control device (controller 201 in Fig. 32 ) of the robotic kitchen 1 and functions as a connection unit that receives a control signal transmitted from the control device. Moreover, the cooking unit 612 functions as a control unit that controls the cooking functions of the cooking function cooking unit 612 itself on the basis of a control signal received at the connection unit.
- Figs. 21 to 24 are diagrams showing examples of attachments.
- each attachment attached to the cooking arm 51 is shown.
- the attaching/detaching portion 611 is provided at the root of each attachment.
- the portion on the distal side of the attaching/detaching portion 611 corresponds to the cooking unit 612 of each attachment.
- a of Fig. 21 shows the outer appearance of a manipulator attachment 651, which is an attachment having a manipulator function of gripping ingredients, tableware, and the like. The details of the manipulator attachment 651 will be described later.
- FIG. 21 shows the outer appearance of a spatula attachment 652, which is an attachment having a spatula function.
- the spatula attachment 652 has a narrow, thin plate-like shape having a tip rounded in a semicircular arc shape.
- the spatula attachment 652 is made from metal such as stainless steel, ceramic, resin, and the like.
- the spatula attachment 652 is used for performing a task such as coating as described above.
- a task of heating the a food ingredient with heat supplied from the cooking arm 51 or cooling a food ingredient with the cold air supplied from the cooking arm 51 by placing the spatula attachment 652 on the food ingredient may be performed.
- FIG. 21 shows the outer appearance of a knife attachment 653, which is an attachment having a knife function.
- the knife attachment 653 has a narrow, thin plate-like shape. A blade is formed in the lower part of the knife attachment 653.
- the knife attachment 653 is made from metal such as stainless steel, ceramic, resin, and the like.
- a task of cutting a food ingredient as described above is performed by using the knife attachment 653.
- the material of the knife attachment 653 is metal, a food ingredient is cut while heating the cut section with heat generated by the heating wire inside the knife attachment 653.
- a of Fig. 22 shows the outer appearance of an all-purpose pin attachment 654.
- the all-purpose pin attachment 654 has a thin pin-like shape having a rounded tip.
- the all-purpose pin attachment 654 is made from metal such as stainless steel.
- the all-purpose pin attachment 654 is inserted into the soup, the all-purpose pin attachment 654 is heated with heat supplied from the cooking arm 51 and the soup is warmed with the heat of the all-purpose pin attachment 654.
- FIG. 22 shows the outer appearance of a shaker attachment 655.
- the shaker attachment 655 has a hollow cylindrical shape.
- the shaker attachment 655 includes a base portion 655-1 and a capsule portion 655-2 provided on the distal side of the base portion 655-1.
- the capsule portion 655-2 is made from a transparent material such as reinforced glass and acrylic resin.
- the attachment 601 described with reference to Figs. 19 to 20 and the like is the shaker attachment 655.
- a task of mixing seasonings put in the capsule portion 655-2 is performed by shaking the entire shaker attachment 655.
- a part of the capsule portion 655-2 is configured as a slidable cover portion. Food ingredients including seasonings to be mixed are put into the capsule portion 655-2 from an opening formed when the cover portion is opened.
- a task of heating the food ingredients put in the capsule portion 655-2 with heat supplied from the cooking arm 51 or mixing the food ingredients put in the capsule portion 655-2 with water and olive oil supplied from the cooking arm 51 may be performed.
- FIG. 22 shows the outer appearance of a spindle attachment 656.
- the spindle attachment 656 has a thin pin-like shape having a sharp tip. A pin-like portion on the distal side of a movable portion 656A is rotatable.
- the spindle attachment 656 is made from metal such as stainless steel.
- a task of peeling vegetables as described above is performed by using the spindle attachment 656.
- the cooking arm 51 to which the spindle attachment 656 is attached sticks the tip of the spindle attachment 656 into the potato, lifts the potato, and rotates the potato in that state.
- another cooking arm 51 to which the peeler attachment is attached presses the peeler attachment against the surface of the rotating potato and performs the task of peeling the potato.
- a of Fig. 23 shows the outer appearance of a peeler attachment 657.
- the peeler attachment 657 has an oblong elliptical shape and an elliptical hole portion is formed at its center. A blade for peeling is formed along the hole portion.
- the peeler attachment 657 is made from metal such as stainless steel, ceramic, resin, and the like.
- the task of peeling vegetables in cooperation with the cooking arm 51 to which the spindle attachment 656 is attached is performed by using the peeler attachment 657.
- FIG. 23 shows the outer appearance of a cleaner attachment 658.
- the cleaner attachment 658 has a substantially triangular shape extending from the root toward the tip.
- the cleaner attachment 658 is made from metal such as stainless steel, resin, and the like.
- the top plate 21A is cleaned by using the cleaner attachment 658.
- the details of the cleaner attachment 658 will be described later.
- Fig. 24 shows the outer appearance of cover attachments 659 and 660.
- the cover attachments 659 and 660 each has a hollow cylindrical housing.
- the cover attachment 659 is wider than the cover attachment 660.
- the cover attachments 659 and 660 are each made from a transparent material such as reinforced glass and acrylic resin.
- the attaching/detaching portion 611 is provided in the center of the upper surface of each of the cover attachments 659 and 660.
- each of the cover attachments 659 and 660 The entire bottom surface of the housing of each of the cover attachments 659 and 660 is opened.
- the cover attachments 659 and 660 each covers a food ingredient placed on the top plate 21A and is used for performing various tasks in its hollow portion. The details of the cover attachments 659 and 660 will be described later.
- the robotic kitchen 1 is provided with various dedicated attachments different from tools used for cooking by a human. By replacing the attachment, it is possible to provide the cooking arm 51 with various cooking functions.
- attachments are grouped and managed in accordance with the cooking process and frequency of use. For example, frequently used attachments are stored in the upper shelf of the cooking assistance unit 31-3, from which it can be easily taken out. In this case, infrequently used attachments are stored in the lower shelf of the cooking assistance unit 31-3.
- the attachments are individually sold.
- the user can increase the variety of cooking that can be performed by the robotic kitchen 1 by additionally purchasing them.
- Fig. 25 is a diagram showing a configuration example of the manipulator attachment 651.
- a gripping portion 671 is provided on the distal end side of the manipulator attachment 651.
- the gripping portion 671 is made from a deformable material such as silicon.
- Finger portions 671A to 671C serving as three fingers are formed in the gripping portion 671 by dividing the gripping portion 671 into three pieces.
- the lower part of Fig. 25 shows a state of the gripping portion 671 as viewed from the distal end side of the manipulator attachment 651.
- the finger portions 671A to 671C have curved faces.
- the width of the finger 671A is larger than the width of the finger 671B or 671C.
- joint portions 681-1 to 681-3 are provided inside each finger portion.
- the joint portions are connected to one another with a wire 682.
- the joint portions 681-1 are provided in the vicinity of the root of the gripping portion 671 branched into the finger portions 671A to 671C and the joint portion 681-3 is provided in the vicinity of the tip end of each finger portion.
- the joint portion 681-2 is provided at a position slightly closer to the joint portion 681-3 than the intermediate position between the joint portion 681-1 and the joint portion 681-3.
- the distance between the joint portions on the distal end side of the gripping portion 671 is smaller than the distance between the joint portions on the rear end side.
- Fig. 26 is a diagram showing an example of movement of the gripping portion 671.
- the state of the gripping portion 671 shown on the left side of Fig. 26 is a standby state.
- the state of the gripping portion 671 shown in the center of Fig. 26 is a state of gripping a large object.
- the respective joint portions 681-1 of the finger portions 671A to 671C are driven to open the portions on the distal side of the joint portions 681-1 outward.
- the respective joint portions 681-2 of the finger portions 671A to 671C are driven to gently close the portions on the distal side of the joint portions 681-2 inward.
- the state of the gripping portion 671 shown on the right side of Fig. 26 is a state of pinching a small object.
- the respective joint portions 681-1 of the finger portions 671A to 671C are driven to open the portions on the distal side of the joint portions 681-1 outward in a manner similar to that when gripping the object.
- the joint portions 681-2 of the finger portions 671A to 671C are driven to close the portions on the distal side of the joint portions 681-2 more inward than when gripping the object.
- the respective joint portions 681-3 of the finger portions 671A to 671C are driven to open the portions on the distal side of the joint portions 681-3 outward.
- the finger portions 671A to 671C are also capable of performing different movements rather than performing the same movement.
- Figs. 27 and 28 are diagrams showing a state of gripping food ingredients.
- the manipulator attachment 651 grips a baguette on which a piece of smoked salmon is put by bending the finger portion 671A and making the finger portion 671B and the finger portion 671C substantially straight.
- the gripping portion 671 of the manipulator attachment 651 may be used to grip a common cooking tool used by the user by driving the respective joint portions of the finger portions 671A to 671C. That is, for example, the gripping portion 671 is also capable of gripping a chopping board that is a common cooking tool, pulling out the chopping board, placing a food ingredient on the chopping board, gripping a common knife, and cutting the food ingredient on the chopping board.
- Air suction ports are provided in the inner surfaces of the finger portions 671A to 671C. By suctioning an object to the inner surfaces of the finger portions 671A to 671C, it is possible to support force for gripping an object such as a food ingredient.
- Fig. 29 is a diagram showing the cleaner attachment 658 in an enlarged state.
- a narrow opening 658A is formed at the distal end of the cleaner attachment 658 having a triangular shape.
- hot water is ejected from the opening 658A.
- the surface of the top plate 21A is washed with the hot water ejected from the opening 658A.
- the hot water used for washing is suctioned into the opening 658A as indicated by the arrows A112.
- the hot water is ejected and suctioned, for example, simultaneously.
- the robotic kitchen 1 can wash the surface of the top plate 21A by driving the cooking arm 51 to slide the distal end of the cleaner attachment 658 along the surface of the top plate 21A.
- the surface of the top plate 21A may be washed by ejecting steam from the opening 658A.
- Fig. 30 shows another application example of the cleaner attachment 658.
- the groove portion 101 is provided with the function of treating waste.
- the cleaner attachment 658 is also used for introducing waste on the top plate 21A into the groove portion 101.
- the robotic kitchen 1 can recognize the position of the waste and introduce the waste into the groove portion 101 by driving the cooking arm 51 to sweep from the position of the waste to the position of the groove portion 101 with the distal end of the cleaner attachment 658.
- the cleaner attachment 658 having such a function is used not only for washing the surface of the top plate 21A, but also for washing other portions of the robotic kitchen 1 such as the inside of the groove portion 101 and the rail 102.
- Fig. 31 is a diagram showing an application example of the cover attachment 659.
- the cover attachment 659 is used covering food ingredients placed on the top plate 21A, for example.
- the cooking arm 51 makes the cover attachment 659 cover two potatoes.
- the cover attachment 659 is filled with water supplied from the cooking arm 51 as shown in Fig. 31 .
- the cover attachment 7659 is filled with water, the air supplied from the cooking arm 51 causes convection inside the cover attachment 659 to wash the food ingredients.
- the water with which the cover attachment 659 is filled is suctioned by the cooking arm 51. After the water has been completely suctioned, the washed ingredients are removed by detaching the cover attachment 659.
- the cover attachment 659 is used for bringing the opening into close contact with the surface of the top plate 21A and washing the food ingredients in the inner space.
- cover attachment 659 is used for smoking ingredients in the inner space.
- the food ingredients are covered with the cover attachment 659 and smoking is performed in the inner space of the cover attachment 659 with smoke supplied from the cooking arm 51.
- the smoke with which the cover attachment 659 is filled is suctioned by the cooking arm 51. After the smoke is suctioned, the smoked food ingredients are removed by detaching the cover attachment 659.
- the cover attachment 659 is also used for frying food ingredients in the inner space.
- the food ingredients are covered with the cover attachment 659, and the frying is performed in the inner space of the cover attachment 659 with high-temperature edible oil sprayed from the cooking arm 51.
- the cooked food ingredients are removed by detaching the cover attachment 659.
- the cover attachment 659 is used for performing various tasks in the inner space. Since the task is performed in the closed space, it is possible to prevent the surrounding from becoming dirty.
- the application of the cover attachment 660 is basically similar to the application of the cover attachment 659.
- the cover attachment 659 is used in a case where the amount of food ingredient is large or a large food ingredient is used and the cover attachment 660 is used in a case where the amount of food ingredient is small or a small food ingredient is used.
- the cover attachments 659 and 660 may be used in a manner that depends on applications, for example, such that the cover attachment 659 is used for washing and smoking food ingredients and the cover attachment 660 is used for frying food ingredients.
- Figs. 32 and 33 are diagrams showing another example of the outer appearance of the robotic kitchen.
- the same components as those of the robotic kitchen 1 described above are denoted by the same reference numerals.
- a robotic kitchen 901 of Figs. 32 and 33 is provided in a space in which many people are present, for example, a lounge of an airport, a party venue of a hotel, or the like.
- the robotic kitchen 901 may be provided in a house as in the robotic kitchen 1.
- the robotic kitchen 1 has a cylindrical housing 911.
- the side shown in Fig. 32 corresponds to the front side of the housing 911.
- Various devices such as a computer are provided inside the housing 911.
- a top plate portion 921 is provided in the upper surface of the housing 911 in a state in which a part thereof protrudes on the rear side as shown in Fig. 33 .
- Chairs are arranged along the circumferential side surface on the rear side of the housing 911.
- the top plate portion 921 is constituted by an annular top plate 921A and a circular top plate 921B.
- the top plate 921B is provided at a position surrounded by the top plate 921A.
- Fig. 34 is a top view of the robotic kitchen 901.
- the top plate 921A and the top plate 921B constituting the top plate portion 921 are provided at the same height with a slight gap therebetween. Since the top plate 921A and the top plate 921B are provided in contact at the same height, the upper surface of the housing 911 is a substantially flat surface.
- the cooking arm 51 is provided along the gap between the top plate 921A and the top plate 921B.
- a rail is provided in the vicinity of the inner edge of the top plate 921A.
- the cooking arm 51 has a configuration similar to the configuration described above. In this example, six cooking arms 51 are provided.
- a part of the top plate portion 921 moves such that cooking can be performed.
- the movement of the part of the top plate portion 921 may be performed in accordance with the cooking process described in the recipe data.
- Fig. 35 is a diagram showing an example of the movement of the top plate portion 921 at the time of switching the operation mode.
- the state shown in the upper part of Fig. 35 is a state before the movement of the top plate portion 921 is started.
- the top plate 921B gradually descends as indicated by the arrows A151 and A152. That is, the movement direction of the part of the top plate portion 921 of the robotic kitchen 901 is a vertically lower direction.
- the cooking arms 51 start their operations.
- the cooking is performed on the top plate 921A or the top plate 921B by using various attachments.
- Fig. 36 is a diagram showing a state of the cooking arms 51 during operation.
- the task is performed by cooking arms 51-1, 51-2, and 51-6 of the cooking arms 51-1 to 51-6.
- the cooking arm 51-1 to which the knife attachment is attached slices the baguette, and the cooking arm 51-6 to which the manipulator attachment is attached performs a task of lifting and transporting a piece of smoked salmon toward the baguette. Also in this example, the baguette on which the smoked salmon is put is cooked.
- the cooking arm 51-2 to which the manipulator attachment is attached passes the baguette on which the smoked salmon is put to a person present near the robotic kitchen 901.
- Fig. 37 is a diagram showing the position of the cooking space.
- a cylindrical space above the top plate 921B that has descended is a cooking space in which the cooking arms 51 perform cooking.
- the cooking space is formed by descending of the top plate 921B.
- the space above the top plate 921A is the space in which dishes are placed and is also used as the cooking space. That is, since the space above the top plate 921A is mainly used as the place where the dishes are placed, the cylindrical space above the top plate 921B is used for the main cooking. However, a part of the space above the top plate 921A is also used as the cooking space when a collaborative task with the user is performed or when serving is performed in front of the user.
- the dishes by the robotic kitchen 901 is provided by directly placing the dishes on the top plate 921A whose temperature can be partially adjusted, for example.
- a heating device using a heating wire or a cooling device of a predetermined type such as an air-cooled type and a forced-air-cooled type are provided inside the housing 911.
- the cooking by the robotic kitchen 901 is performed in either the cooking space above the top plate 921B formed in the center of the people surrounding the robotic kitchen 901 or the cooking space above the top plate 921A.
- the robotic kitchen 901 can show the state in which the cooking is performed as entertainment and produce the space.
- the robotic kitchen 901 can secure a distance from the side surface of the housing 911 to the cooking space. By securing the distance from the side surface of the housing 911 to the cooking space, the cooking arms 51 performing the cooking and the attachments used in the cooking can be prevented from hitting the people.
- Fig. 38 is a diagram showing an arrangement example of the cooking assistance units.
- the cooking assistance units 31-1 to 31-6 having functions of assisting the cooking of the robotic kitchen 901 are provided inside the housing 911, arranged in an annular form.
- the positions of the cooking assistance units 31-1 to 31-6 are positions on the side of the bottom surface of the top plate 921A.
- Fig. 39 is a perspective view showing an example of the inner circumferential side surface of the housing 911.
- the inner circumferential side surface of the housing 911 that appears when the top plate 921B descends is constituted by a member serving as a door slidable in a predetermined direction.
- door portions 931-1 to 931-3 are shown.
- the cooking assistance unit 31-1 of Fig. 38 appears.
- the cooking assistance unit 31-2 appears.
- the cooking assistance unit 31-3 appears.
- the cooking assistance units 31-4 to 31-6 also appear when the door portion provided in front of each of them is opened.
- the cooking assistance units 31-1 to 31-6 are provided with their fronts directed to the center of the housing 911.
- each of the cooking assistance units is provided on the side surface surrounding the cooking space such that it is accessible from the cooking space formed when the top plate 921B descends.
- Each cooking assistance unit appears together with the cooking space as the top plate 921B descends.
- the robotic kitchen 901 can access a predetermined cooking assistance unit through the cooking arm 51 and perform the cooking by using the cooking assistance unit.
- a groove portion having a washing function and a waste treatment function is also formed in the robotic kitchen 901.
- Fig. 40 is a diagram showing an arrangement example of the groove portion.
- the position of the groove portion 101 as viewed from above is a position below the vicinity of the boundary between the top plate 921A and the top plate 921B.
- the groove portion 101 is formed to surround the top plate 921B that has descended.
- Fig. 41 is a cross-sectional view of the housing 911.
- the groove portion 101 is formed at a position lower than the top plate 921B around the top plate 921B that has descended. Since the groove portion 101 is provided to surround the top plate 921B that has descended, the cooking arms 51 can wash the attachments and tableware and treat waste through the groove portion 101 from any position on the rail 102.
- the respective configurations described with reference to Figs. 10 and 13 are also provided in the groove portion 101 formed in the housing 911.
- Fig. 42 is a diagram showing a state in which waste is treated.
- the robotic kitchen 901 may introduce the waste on the top plate 921B into the groove portion 101 by operating the cooking arm 51-1 to sweep the surface of the top plate 921B with the distal end of the cleaner attachment.
- the groove portion 101 of the robotic kitchen 901 may have a function of housing the cooking arms 51.
- the groove portion 101 is used as a housing space for the cooking arms 51.
- the cooking arms 51 are housed in the groove portion 101 on the sleep mode or in accordance with the cooking process, for example.
- the robotic kitchen 901 basically has a configuration similar to that of the robotic kitchen 1 while the shape of the housing and the arrangement of the respective configurations are different.
- Fig. 43 is a block diagram showing a configuration example of hardware of the robotic kitchen 1. It should be noted that the hardware configurations of the robotic kitchen 1 and the robotic kitchen 901 are basically the same, and thus the robotic kitchen 1 will be described as an example here and the description of the robotic kitchen 901 will be omitted.
- the robotic kitchen 1 is configured by connecting each unit to the controller 201.
- the same configurations as the configurations described above are denoted by the same reference signs. Duplicate descriptions will be omitted as appropriate.
- the above-mentioned configurations such as the cooking assistance system 31, the cooking arms 51, and the arm function control device 133 are connected to the controller 201.
- the arm movement control unit 202, the washing unit 203, the top plate driving unit 204, and the top plate temperature adjustment unit 205 are connected to the controller 201.
- the camera 206, the microphone 207, the projector 208, the speaker 209, the sensor 210, and the communication unit 211 are connected to the controller 201.
- the controller 201 is constituted by a computer including a central processing unit (CPU), a read only memory (ROM), a random access memory (RAM), a flash memory, and the like.
- the controller 201 executes a predetermined program by the CPU and controls general operations of the robotic kitchen 1.
- the computer constituting the controller 201 is housed inside the housing 11 and functions as a control device that controls the operation of the robotic kitchen 1.
- the arm movement control unit 202 is constituted by a motor that moves the arm movement unit 131 along the rail 102, a sensor that detects the position of the arm movement unit 131, and the like.
- the washing unit 203 is constituted by an ultraviolet disinfection machine, a hand dryer, and a water ejection device.
- the washing unit 203 is also provided with a sensor or the like that detects that the user's hands are put into the groove portion 101.
- a sensor or the like that detects that the user's hands are put into the groove portion 101.
- at least one of the ultraviolet disinfection machine, the hand dryer, or the water ejection device may be provided in the washing unit 203.
- Ultraviolet rays generated by the ultraviolet disinfection machine constituting the washing unit 203 are emitted from the irradiation ports 111 provided in the groove portion 101. Moreover, the air jet generated by the hand dryer constituting the washing unit 203 is discharged from the ejection ports 112 provided in the groove portion 101. Water pressurized by the ejection device constituting the washing unit 203 is discharged from the ejection ports 113 provided in the groove portion 101.
- the top plate driving unit 204 is constituted by a motor that drives the top plate 21B together with the cooking assistance system 31, a sensor that detects the position of the cooking assistance system 31 or the like, and the like.
- the top plate temperature adjustment unit 205 is constituted by a heating device that warms the surface of the top plate 21A, a cooling device that cools the surface of the top plate 21A, a temperature sensor that measures the temperature of each portion of the top plate 21A, and the like.
- the temperature of the surface of the top plate 21A can be adjusted for each position.
- the temperature of the surface of the top plate 21A is adjusted in accordance with a cooking process, for example.
- the camera 206 images a room where the robotic kitchen 1 is installed and outputs an image obtained by imaging to the controller 201.
- the camera 206 is provided at various positions such as the sides of the housing 11, the front of the cooking assistance system 31, the inside of the groove portion 101, and the ceiling from which the entire room where the robotic kitchen 1 is installed can be looked down at.
- the camera 206 may be a normal camera that takes a two-dimensional image or may be a depth camera that takes a distance image, for example.
- the microphone 207 detects the user's voice and outputs the user's voice data to controller 201.
- the microphone 207 also detects an environmental sound and the like of the room where the robotic kitchen 1 is installed. The data of the environmental sound is used for analysis of a peripheral state and the like.
- the projector 208 projects various types of information such as a menu of dishes, information regarding a cooking process, and the like.
- Various requests for the robotic kitchen 1, such as a request for a refill, are also input by using a UI projected by the projector 208.
- the surface of the top plate 21A is used as a projection surface of information by the projector 208.
- Another flat surface such as a floor surface, a wall surface provided on the rear side of the robotic kitchen 1, and a surface of a top plate of the dining table provided in front of the robotic kitchen 1 may be used as the projection surface.
- the shelf board, the annular top plate 921A, or the circular top plate 921B of the cooking assistance unit 31 is used as the projection surface of the information by the projector 208.
- a display such as an LCD or an organic EL display may be provided at a predetermined position in the robotic kitchen 1.
- the speaker 209 outputs a predetermined sound such as a synthesized voice, a sound effect, and BGM.
- the sensor 210 is constituted by various sensors such as temperature and wetness sensors, a pressure sensor, an optical sensor, a distance sensor, a human sense, and a position measurement sensor.
- the detection by the sensor 210 is performed at a predetermined cycle.
- Data representing the detection result of the sensor 210 is output to the controller 201.
- the communication unit 211 is a wireless communication module such as a wireless LAN module or a portable communication module corresponding to long term evolution (LTE).
- the communication unit 211 communicates with the transportation robot 2 and an external device such as a server on the Internet.
- the communication between the controller 201 and the cooking arms 51 may be performed by the communication unit 211.
- the communication unit 211 communicates with a portable terminal such as a smartphone and a tablet terminal used by the user.
- a portable terminal such as a smartphone and a tablet terminal used by the user.
- the user's request to the robotic kitchen 1 may be input by an operation on the portable terminal.
- the robotic kitchen 1 may notify the user by using screen display of the portable terminal or the like. For example, when a timing of a task to be performed in collaboration with the user comes, the user is notified of it by using the screen display of the portable terminal. In this manner, the robotic kitchen 1 has a function of cooperating with the user's portable terminal.
- the camera 206, the microphone 207, the projector 208, the speaker 209, and the sensor 210 may be provided at positions distant from the robotic kitchen 1, rather than provided in the robotic kitchen 1.
- Each device provided at the position distant from the robotic kitchen 1 is connected to the controller 201 via wireless communication.
- the projector 208 provided at the position distant from the robotic kitchen 1 projects predetermined information on a projection surface on the basis of information transmitted from the controller 201.
- the sensor 210 provided at the position distant from the robotic kitchen 1 transmits detected data to the controller 201.
- Fig. 47 is a block diagram showing a configuration example of hardware of the cooking arm 51.
- the cooking arm 51 includes a controller 231, a communication unit 232, a sensor 233, and a motor 234.
- the controller 231 includes a CPU, a ROM, RAM, a flash memory, and the like.
- the controller 231 executes a predetermined program and controls the driving of the motor 234 on the basis of the information transmitted from the controller 201 serving as a control device on the main body side of the robotic kitchen 1. Moreover, the controller 231 controls the driving of the motor 234 in accordance with the detection result of the sensor 233.
- the controller 231 controls the driving of the attachment.
- the controller 231 functions as a cooking control unit that controls the cooking function of the attachment.
- the communication unit 232 receives information transmitted from the controller 201 and outputs the received information to the controller 231.
- the controller 201 transmits, for example, information for controlling the driving of each joint portion and information for controlling the driving of the attachment.
- the communication unit 232 transmits information regarding the state of the cooking arm 51 to the controller 201 as appropriate.
- the information regarding the state of the cooking arm 51 includes information indicating a driving state of each joint portion, which is represented by the detection result of the sensor 233, and the like.
- the communication unit 232 is connected to the controller 201 serving as the control device on the main body side of the robotic kitchen 1 and functions as a connection unit that transmits and receives various types of information to/from the controller 201.
- the sensor 233 is constituted by a gyro sensor, an acceleration sensor, a touch sensor, a camera (image sensor), and the like, for example.
- the sensor 233 detects angular velocity, acceleration, or the like of each joint portion and takes a peripheral image or the like and outputs information representing the detection result and the taken image to the controller 231.
- the sensor 233 also detects the user's contact state to each member of the cooking arms 51 during operation of the cooking arms 51 on the basis of the detection result of the acceleration sensor, the touch sensor, the camera, or the like, and outputs information representing the user's contact state to the controller 231. For example, the sensor 233 detects the contact state of the user performing a task in collaboration with the cooking arms 51.
- the information representing the detection result of the sensor 233 is, as appropriate, output to the communication unit 232 from the controller 231 and transmitted to the controller 201 on the main body side. Based on the information detected by the sensor 233, the operation of the cooking arm 51 is controlled by the controller 201.
- autonomous operating functions may be provided in the cooking arms 51.
- the motor 234 is provided at each joint.
- the motor 234 performs a rotational operation about the axis in accordance with the control of the controller 231.
- the motor 234 functions as a drive unit that drives in accordance with the control of the controller 231.
- An encoder that detects the amount of rotation of the motor 234, a driver that adaptively controls the rotation of the motor 234 on the basis of a detection result of the encoder is also provided in each joint portion.
- Fig. 45 is a block diagram showing a functional configuration example of the controller 201 of Fig. 43 .
- At least some of the functional units shown in Fig. 45 are realized by executing the predetermined program through the CPU of the computer constituting the controller 201.
- a cooking process management unit 241, an operation mode management unit 242, an arm control unit 243, a unit control unit 244, a recipe data storage unit 245, a recipe data acquisition unit 246, a recipe data processing unit 247, a cooking log management unit 248 are realized in the controller 201.
- An analysis unit 249, a peripheral state recognition unit 250, a person state recognition unit 251, a voice analysis unit 252, a voice recognition unit 253, a voice UI control unit 254, and a projection control unit 255, are also realized in the controller 201.
- the cooking process management unit 241 controls each unit in accordance with a cooking process described in the recipe data.
- the control on each unit by the cooking process management unit 241 is performed as appropriate in accordance with recognition results of the peripheral state recognition unit 250, the person state recognition unit 251, and the voice recognition unit 253.
- the cooking process management unit 241 manages the safety in order to avoid danger caused by the collaborative task. In addition, the cooking process management unit 241 predicts the user's action and performs indication according to a prediction result to the user.
- the operation mode management unit 242 manages the operation mode of the robotic kitchen 1.
- the operation mode management unit 242 controls the top plate driving unit 204 to deform the robotic kitchen 1 in accordance with the operation mode.
- the operation mode management unit 242 causes the cooking assistance system 31 or the like to be housed inside the housing 11 as described with reference to Fig. 6 and the like.
- the operation mode management unit 242 switches the operation mode of the robotic kitchen 1 from the sleep mode to the active mode.
- the operation mode management unit 242 lifts the cooking assistance system 31 together with the top plate 21B to expose the cooking assistance space of the cooking assistance system 31, the groove portion 101, and the like.
- the cooking assistance space is a generic term for a space which appears when a part of the ceiling portion moves and in which the function of assisting the cooking is exerted.
- the cooking assistance space includes not only a space completely identical to the space in which the function of assisting the cooking is exerted but also a partial space included in such a space.
- the arm control unit 243 controls the position on the rail 102 of the cooking arm 51 by driving the arm movement control unit 202.
- the arm control unit 243 controls the attitude and operation of the cooking arm 51 by driving each joint portion of the cooking arm 51.
- the arm control unit 243 controls the driving of the attachment attached to the cooking arm 51.
- the unit control unit 244 controls the driving of the unit of each unit.
- Each cooking assistance unit constituting the cooking assistance system 31, each device of the washing unit 203, the arm function control device 133, and the like are driven in accordance with the control of the unit control unit 244.
- the recipe data storage unit 245 stores recipe data describing a cooking process.
- the recipe data storage unit 245 is realized as a memory of the controller 201.
- the recipe data acquisition unit 246 reads and acquires the recipe data for the dish from the recipe data storage unit 245. As shown in Fig. 46 , the recipe data is prepared for each dish.
- Which dish to make is selected by the user from a menu projected by the projector 208, for example.
- ingredients prepared in the cooking assistance system 31 are recognized by the peripheral state recognition unit 250 and the cooking process management unit 241 selects a dish that can be made from the food ingredients prepared in the cooking assistance system 31.
- Which dish to make may be selected in a manner that depends on the person who eats the dish.
- the person who is present near the robotic kitchen 1 is recognized by the person state recognition unit 251 and the cooking process management unit 241 selects the dish that matches the preference of the recognized person.
- the cooking process management unit 241 information regarding the preference of a person living in a house where the robotic kitchen 1 is installed is registered. In this case, the cooking using the cooking arms 51 is performed in accordance with the preference of the person who eats the dish.
- the cooking process management unit 241 may select the dish according to attributes of the person who eats the dish, such as gender and age or may select the dish according to characteristics of the person who eats the dish, such as personality and mood.
- the attributes or characteristics of the person who eats the dish are also recognized by the person state recognition unit 251.
- the cooking process management unit 241 may select the dish according to the timing of eating the dish, such as a season, a temperature, and a time zone.
- the recipe data acquisition unit 246 reads and acquires recipe data for the dish selected to be made from the recipe data storage unit 245 and outputs the recipe data to the cooking process management unit 241.
- the recipe data acquired by the recipe data acquisition unit 246 is also output to the recipe data processing unit 247 as necessary.
- the recipe data may be acquired from the server connected via the Internet as shown in Fig. 47 rather than acquired from the recipe data storage unit 245 in the robotic kitchen 1.
- Recipe data corresponding to the request from the recipe data acquisition unit 246 is transmitted to the robotic kitchen 1 from the recipe data management server 271 and is acquired by the recipe data acquisition unit 246.
- the recipe data processing unit 247 processes the recipe data supplied from the recipe data acquisition unit 246 and outputs the processed recipe data to the cooking process management unit 241. The processing of the recipe data will be described later.
- the cooking log management unit 248 manages a cooking log which is a history of cooking performed in the robotic kitchen 1.
- the cooking log records, for example, information regarding people who ate dishes, information regarding dishes made in the robotic kitchen 1, and information regarding cooking that represents processes by which the robotic kitchen 1 made the dishes.
- the analysis unit 249 analyzes the image captured by the camera 206 and the detected data of the sensor 210. An analysis result of the analysis unit 249 is supplied to the peripheral state recognition unit 250 and the person state recognition unit 251.
- the peripheral state recognition unit 250 recognizes a peripheral state on the basis of the analysis result of the analysis unit 249.
- the recognition result of the peripheral state is output to the cooking process management unit 241.
- the peripheral state recognition unit 250 recognizes a state of the cooking assistance system 31, such as the types and amount of food ingredients, the type and number of tableware, the type and number of cutlery, and the types of attachments prepared in the cooking assistance system 31. Moreover, when cooking with heat is performed in the cooking assistance unit 31-5 or the cooking assistance unit 31-6 of the cooking assistance system 31, the peripheral state recognition unit 250 also recognizes a state of the food ingredient when cooked with heat as the state of the cooking assistance system 31.
- the peripheral state recognition unit 250 recognizes a state of the cooking arm 51, such as a position and an operation of each cooking arm 51 and a state of the food ingredient handled by the cooking arm 51.
- the person state recognition unit 251 recognizes a state of the person on the basis of the analysis result of the analysis unit 249. In addition to the movement of the person, the person's gender, age, height, expression, emotion, progress of the meal, and the like are also recognized. The recognition result of the state of the person is output to the cooking process management unit 241.
- the person state recognition unit 251 recognizes a state of the task of the user, such as a standing position of the user and a movement of each site of the user's body.
- the cooking process management unit 241 learns the task performed by the user on the basis of a recognition result of the person state recognition unit 251.
- the cooking process management unit 241 controls the arm control unit 243 and the like, such that the continuation of the task is performed.
- the person state recognition unit 251 recognizes the result of tasting. Whether or not the user who performed the tasting feels delicious may be recognized on the basis of the user's expression.
- the state of the user's task recognized by the person state recognition unit 251 is also used in the cooking process management unit 241 to secure the user's safety, to determine whether the user is performing the task incorrectly, or the like.
- the range of motion of the cooking arm 51 is set as a dangerous area.
- a range in which cooking is being performed with heat a range in which the temperature is high because a dish cooked with heat has been placed just before, and a range in which a cooking tool including an edged tool is placed are also set as dangerous areas.
- the safety of the user is secured by outputting a warning or stopping the task of the cooking arm 51 when the user's body is present in the vicinity of the dangerous area. Since the task is performed in collaboration with the user, it is necessary to give consideration to such security. It should be noted that the details of the safety management for securing the safety will be described later.
- the person state recognition unit 251 recognizes a state of the person who is present near the robotic kitchen 1, such as the number of people who eat the dish, attributes of the person who eats the dish, and the like. For example, the person who is present near the robotic kitchen 1 is considered as the person who eats the dish.
- the recognition of the peripheral state by the peripheral state recognition unit 250 and the recognition of the person state by the person state recognition unit 251 may be performed by using an analysis result of a voice detected by the microphone 207.
- the voice analysis unit 252 analyzes the user's voice detected by the microphone 207 and outputs the analysis result to the voice recognition unit 253.
- the voice recognition unit 253 recognizes the content of the user's utterance on the basis of the analysis result of the voice analysis unit 252. For example, a request to the robotic kitchen 1 is input by voice. The recognition result of the content of the user's utterance is output to the cooking process management unit 241 and the voice UI control unit 254.
- the voice UI control unit 254 determines the content of a response to the user's utterance on the basis of the recognition result of the voice recognition unit 253 and outputs a synthesized voice from the speaker 209. Moreover, the voice UI control unit 254 outputs various synthesized voices of an inquiry or notification to the user and the like from the speaker 209 in accordance with the control of the cooking process management unit 241.
- the projection control unit 255 controls the projection by the projector 208.
- Fig. 48 is a diagram showing an example of the description of the recipe data.
- the cooking process represents the order of tasks.
- Types of tasks constituting the cooking process include a task performed by the robotic kitchen 1 (cooking arm 51) alone, a task performed in collaboration with the user, and the like.
- the task performed by the robotic kitchen 1 alone will be referred to as a solo task and the task performed in collaboration with the user will be referred to as a collaborative task.
- the information regarding the cooking process includes a plurality of pieces of task information which is information regarding the task.
- one piece of task information includes information regarding a cooking arm ID, an attachment type, an attachment function, a cooking assistance unit type, a cooking arm position, a cooking arm operation, ingredients, and tableware.
- the cooking arm ID is an identifier of the cooking arm 51 that performs the task. Based on the cooking arm ID, the cooking arm 51 in charge of the task is determined. In a case where the plurality of cooking arms 51 performs a single task in cooperation with each other, a plurality of cooking arm IDs is described in the task information of the task.
- the attachment type represents the type of attachment used for the task.
- the attachment represented by the attachment type is attached to the cooking arm 51 in charge of the task. It should be noted that in a case where the attachment is the manipulator attachment 651 or the like and where the gripping portion 671 grips and uses a generally-used cooking tool, information regarding the cooking tool gripped and used by the gripping portion 671 may be included as information regarding the attachment type.
- the attachment function represents functions of the attachment used for the task, such as supply of water and suction of the air.
- the cooking assistance unit type represents the type of cooking assistance unit 31 used for the task.
- the use of the cooking assistance unit 31-4 in which the tableware is stored is specified by the type of cooking assistance unit.
- the cooking arm position represents a position on the rail 102 of the cooking arms 51 when performing the task.
- the position of the cooking arm 51 is controlled to move to a position represented by the cooking arm position.
- the cooking arm operation represents the operation of the cooking arm 51 when performing the task. Specifically, the operation of the cooking arm 51 is represented by a time series of angles of each joint, torque of the motor 234 that drives the joint, and the like. Each portion of the cooking arm 51 is controlled to perform an operation represented by the cooking arm operation.
- the ingredients represent ingredients such as seasonings and food ingredients used in the task.
- the tableware represents tableware, cutlery, and the like used in the task.
- information regarding cooking tools that the user needs to use in the task may be included.
- Such various types of information are described in the task information as information regarding each task.
- Fig. 49 is a diagram showing a specific example of the description of the recipe data.
- the cooking process shown in Fig. 49 is a cooking process related to "salad".
- tasks #0 to #12 are shown as the cooking process related to the "salad”.
- the task #0 is a task of preparing a food ingredient 1.
- the task #0 is a solo task performed by the robotic kitchen 1 alone.
- the cooking arm 51-1 to which the manipulator attachment 651 is attached takes the food ingredient 1 which is a first food ingredient out of the cooking assistance system 31 and places the food ingredient 1 on the top plate 21A.
- the task #1 is a solo task of preparing a food ingredient 2 which is a second ingredient. Like the task #0, the food ingredient 2 is prepared in accordance with the description of the task information of the task #1.
- the task #2 is a solo task of preparing a food ingredient 3 which is a third ingredient.
- the food ingredient 3 is prepared in accordance with the description of the task information of the task #2.
- the "salad” made on the basis of the recipe data of Fig. 49 is a dish using three kinds of food ingredients.
- Each operation is performed in parallel with other tasks as necessary.
- the task described later in the cooking process may be performed before the task described earlier in a manner that depends on the state of the cooking arm 51.
- the task #3 is a solo task of preparing a knife for the user.
- the cooking arm 51-1 to which the manipulator attachment 651 is attached takes the knife for the user out of the cooking assistance system 31 and presents the knife to the user. The user receives the presented knife.
- the task #4 is a task of learning the user's movement of cutting the food ingredient 1 and cutting the food ingredient 1 by the same movement as the user's movement.
- the task #4 is a collaborative task performed in collaboration with the user.
- a notification for prompting the user to cut the food ingredient 1 is made.
- Information regarding such a notification is described in the task information of the collaborative task.
- the notification to the user is made, for example, by projecting predetermined information through the projector 208 or by outputting a synthesized voice from the speaker 209.
- the notification to the user may be made by causing an LED provided at a predetermined position in the top plate 21A to emit light.
- the notification to the user may be made by sending information to the user's portable terminal and displaying the information on the screen.
- the user cuts the food ingredient 1 by using the presented knife which is a cooking tool necessary for the task.
- the user's movement is recognized by the person state recognition unit 251 and learning is performed.
- the user is notified of the completion of the learning. The user who has received this notification can leave the continuation of the cutting of the food ingredient 1 up to the robotic kitchen 1.
- the food ingredient 1 is cut by the same movement as the movement of the user by the cooking arm 51-2 to which the knife attachment 653 is attached, for example.
- the task #5 is a collaborative task of cutting the food ingredient 2. As in the task #4, the user's movement of cutting the food ingredient 2 is learned and the cutting of the food ingredient 2 is taken over by the cooking arm 51 on the basis of the learning result.
- the task #6 is a collaborative task of cutting the food ingredient 3. As in the task #4, the user's movement of cutting the food ingredient 3 is learned and the cutting of the food ingredient 3 is taken over by the cooking arm 51 on the basis of the learning result.
- the task #7 is a solo task of preparing ingredients of dressing.
- the cooking arm 51-1 to which the manipulator attachment 651 is attached takes a seasoning out of the cooking assistance system 31.
- the cooking arm 51-3 to which the shaker attachment 655 is attached opens the cover portion of the shaker attachment 655 and moves the shaker attachment 655 close to the cooking arm 51-1 gripping the seasoning.
- the task #7 is a task performed by the plurality of cooking arms 51 in cooperation with each other.
- the cooking arm 51-1 pours the seasoning into the shaker attachment 655.
- a plurality of seasonings may be sequentially poured into the shaker attachment 655.
- the task #8 is a solo task of mixing the poured seasonings as ingredients of the dressing.
- the cooking arm 51-3 shakes the shaker attachment 655 and mixing the seasonings poured into the shaker attachment 655. Olive oil and the like are also supplied into the shaker attachment 655 from the cooking arm 51-3.
- the task #9 is a task of tasting the dressing.
- the task #9 is a collaborative task.
- the cooking arm 51-3 presents the shaker attachment 655 with the cover opened to the user. Moreover, a notification for prompting to have a taste is made. In response to the notification from the robotic kitchen 1, the user tastes the dressing.
- the task of tasting is completed.
- the task #10 is a solo task of preparing tableware.
- the cooking arm 51-1 to which the manipulator attachment 651 is attached takes a plate for presenting the salad out of the cooking assistance system 31 and places the plate on the top plate 21A.
- the task #11 is a collaborative task to present the salad.
- the user is prompted to present the cut ingredients 1, 2, and 3 on the tableware.
- the user presents the cut ingredients 1, 2, and 3 on the plate.
- the cooking arm 51-3 performs an operation of putting the dressing in the shaker attachment 655 on the salad.
- the task #12 is a cleaning task.
- the task #12 is a solo task.
- the cooking arm 51-4 to which the cleaner attachment 658 is attached introduces the remains of the cut food ingredients into the groove portion 101. Moreover, the surface of the top plate 21A is washed with hot water or steam.
- the cooking of the "salad” is performed by the cooking process including the series of tasks described above. Information for achieving each task as described above is described in each piece of recipe data.
- the content of each task changes in accordance with various conditions such as a condition of the person who eats the dish. Even in a case of making the same dishes, for example, the more people eat the dishes, the more food ingredients are needed and the more times the same task is repeated.
- recipe data of one dish for example, a plurality of pieces of recipe data having different description contents in a manner that depends on a combination of conditions is prepared.
- Fig. 50 is a diagram showing examples of conditions under which the description contents of the recipe data are determined.
- the conditions under which the description contents of the recipe data are determined include a condition related to the cooking and a condition related to the person who eats the dish.
- the condition related to the cooking includes, for example, the number of cooking arms 51, the usable attachment types, the number of users (people) involved in the cooking, and the degree of involvement in the cooking.
- the number and types of tasks that can be performed simultaneously vary in a manner that depends on the number of cooking arms 51.
- the type of task that can be performed varies in a manner that depends on the type of attachment prepared in the cooking assistance system 31.
- the number and types of collaborative tasks that can be performed simultaneously vary in a manner that depends on the number of users involved in the cooking.
- the number, contents, and percentage of collaborative tasks vary in a manner that depends on the degree of involvement in the cooking. For example, the higher the degree of involvement, the greater the number of collaborative task or the more advanced task is required for the user.
- the user can select the degree of involvement by himself or herself.
- the degree of involvement is selected at a predetermined timing, for example, before the start of cooking.
- the condition related to the person who eats the dish includes the number, gender, and age of people who eats the dish.
- the amount of food ingredients required, the number of times the same task is repeated, the degree of seasoning, a presentation method, and the like vary in a manner that depends on these conditions.
- Various conditions represented by information that can be acquired as information about the user such as schedule information regarding the schedule of the person who eats the dish and biometric information, as well as conditions related to the outer appearance such as weight and height may be included as the condition related to the person who eats the dish.
- the cooking is performed by reducing the amount of food ingredients.
- the cooking is performed with reduced salt.
- a plurality of pieces of recipe data whose description content differs in a manner that depends on such a combination of conditions are prepared as recipe data for each dish.
- recipe data for the dish A pieces of data having different description contents which are as many as the number of combinations of conditions are prepared.
- the recipe data acquisition unit 246 of Fig. 45 reads and acquires recipe data of the pieces of recipe data for the selected dish, which corresponds to the conditions, from the recipe data storage unit 245.
- recipe data corresponding to the conditions may be generated on the basis of one piece of recipe data serving as a reference.
- the recipe data processing unit 247 processes one piece of recipe data serving as the reference acquired by the recipe data acquisition unit 246 to generate recipe data corresponding to the conditions.
- Fig. 51 is a diagram showing an example of processing the recipe data.
- the learned model shown in Fig. 51 is a model for outputting recipe data corresponding to the conditions, using the condition related to the cooking, the condition related to the person who eats the dish, and the recipe data as inputs. For example, machine learning is performed by using various types of recipe data and conditions as inputs and a learned model is generated. Conditions other than the condition related to the cooking and the condition related to the person who eats the dish may be used for learning the model.
- the recipe data processing unit 247 inputs the recipe data for the dish A serving as a reference to a learned model together with the condition related to the cooking and the condition related to the person who eats the dish.
- the recipe data processing unit 247 acquires recipe data output as an estimation result as recipe data for the dish A, which corresponds to the conditions.
- Such a model may be prepared in the recipe data processing unit 247 to process the recipe data.
- Fig. 52 is a diagram showing another example of processing the recipe data.
- the recipe data processing unit 247 merges recipe data for the dish A and recipe data for the dish B to generate recipe data for making the dishes A and B as shown in Fig. 52 .
- the tasks for making the dish A and the tasks for making the dish B are combined one after the other.
- the robotic kitchen 1 can shorten the cooking time by changing the description contents of the recipe data such that the tasks for making the respective dishes are performed in parallel as necessary.
- the cooking process management unit 241 includes a dangerous area detection unit 261, a secured area determination unit 262, a danger determination unit 263, an action prediction unit 264, and a prediction result response unit 265 as a configuration for managing the safety and supporting the user's movements.
- the dangerous area detection unit 261 detects and sets a dangerous area on the basis of recognition results of the peripheral state recognition unit 250 and the person state recognition unit 251.
- the dangerous area includes a range of motion of the cooking arm 51, a range in which cooking is being performed with heat, a range in which the temperature is high because a dish cooked with heat has been placed just before, a range in which oil is to spatter, a range in which a cooking tool including an edged tool is placed, and the like, for example.
- the dangerous area includes a range other than the ranges above as long as it is a range in which the user who performs the collaborative task is likely to encounter danger.
- the secured area determination unit 262 determines a range necessary for performing a task in the next process of the current process as a secured area.
- the secured area determination unit 262 determines the secured area in a size depending on the task content.
- the cooking process management unit 241 indicates (projects) a secured area and a dangerous area through the projector 208 by controlling the projection control unit 255 on the basis of information regarding the dangerous area determined by the dangerous area detection unit 261 and the secured area determined by the secured area determination unit 262.
- the danger determination unit 263 recognizes a distance between the set dangerous area and the user on the basis of the recognition results of the peripheral state recognition unit 250 and the person state recognition unit 251, and determines whether or not the danger is imminent on the basis of whether the distance between the set dangerous area and the user is smaller than a predetermined distance.
- the danger determination unit 263 determines that the danger is imminent, controls the projection control unit 255 and the voice UI control unit 254 to change the indication state (projection state) of the projector 208 or indicate (notify) that the danger is imminent by a voice from the speaker 209.
- the action prediction unit 264 predicts the user's action on the basis of the recognition results of the peripheral state recognition unit 250 and the person state recognition unit 251, and supplies the prediction results to the prediction result response unit 265.
- the action prediction unit 264 predicts the user's next action on the basis of the recipe data and the user's action. For example, machine learning may be used for the action prediction of the action prediction unit 264.
- the action prediction unit 264 when the action prediction unit 264 detects an action of taking a vegetable out of the cooking assistance unit 31 or the like, the action prediction unit 264 checks the type of taken-out vegetable against the recipe data and predicts an action that can be taken with the taken-out vegetable, for example, an action of cutting, peeling, boiling, or frying the vegetable.
- the prediction result response unit 265 controls the unit control unit 244, the projection control unit 255, and the voice UI control unit 254 to operate the cooking assistance unit 31, change the projection state by the projector 208, or perform a response operation to support the user's action by a voice from the speaker 209.
- the prediction result response unit 265 performs a response operation to support the user such that the user can smoothly take out a cooking tool necessary for cutting the taken-out vegetable.
- the prediction result response unit 265 controls the unit control unit 244 to operate the cooking assistance system 31 to slide the front member of the cooking assistance unit 31-3 in which the knife and the chopping board are stored to open, such that the necessary cooking tools can be taken out.
- the prediction result response unit 265 may control the projection control unit 255 and the voice UI control unit 254 to project the cooking assistance unit 31-3 in which the necessary cooking tools are stored with a color, a design, and the like easily visually recognizable and to output a guidance voice, for example, "The cooking assistance unit 31-3 stores knives and chopping boards.”
- a guidance voice for example, "The cooking assistance unit 31-3 stores knives and chopping boards.”
- the user can also cook a totally unrelated dish while the robotic kitchen 1 performs the cooking on the basis of the recipe data. Moreover, also in this case, the robotic kitchen 1 supports the cooking.
- the user can cause the robotic kitchen 1 to cook a main dish and the user himself or herself can cook a side dish at the same time.
- the action prediction unit 264 predicts not only cooking-related actions but also actions necessary for managing the safety, such as an action of approaching a dangerous area.
- the action prediction unit 264 stores the user's flow line near the robotic kitchen 1 and the user's movements in association with each other, and learns a movement pattern when moving on the flow line to approach the dangerous area. Then, the action prediction unit 264 predicts that the user will approach the dangerous area on the basis of the presence or absence of the movement pattern when moving on the flow line to approach the dangerous area.
- the prediction result response unit 265 notifies the user that the user is approaching the dangerous area and the danger is imminent as one of the response operations to support the user's action on the basis of the action prediction result.
- the notification when the danger is imminent is basically similar to the notification in the processing in which the danger determination unit 263 notifies that the danger is imminent.
- the danger determination unit 263 may notify the user that the danger is imminent the dangerous area and the danger is imminent on the basis of an action prediction result of the action prediction result prediction unit 264.
- the projector 208 displays a color and a design indicating the dangerous area D1 in the corresponding range of the top plate 21A.
- the user can perform a free task by himself or herself in a space in which the task is not performed while the robotic kitchen 1 performs a task alone. At this time, the user may encounter danger of interfering with the movement of the cooking arm 51 or touching an area in which the top plate 21A is in a high temperature state or an edged tool like the knife attachment 653 or the like as a result of performing the task freely.
- the dangerous area D1 is set and put in a visually recognizable state as shown in Fig. 53 , the user can recognize an area that becomes dangerous when the user approaches it, and the user can avoid the risk to encounter the danger by himself or herself.
- the user can recognize the area in which the user is likely to encounter the danger. Therefore, the user can perform a free task that the user desires with the safety managed.
- a range in which the dish is moved by the cooking arm 51-1 at the left end in the figure in order to perform the next task is set as a secured area N1 and the projector 208 displays a color and a design indicating the secured area N1 in the corresponding range of the top plate 21A.
- the user can perform a free task in a space in which the task is not performed while the robotic kitchen 1 performs the task alone, but the movement of the cooking arm 51 may be interfered with after the next task process starts as a result of the user freely performing the task.
- the user can predict the movement of the cooking arm 51 in the next task process. Accordingly, the user can consciously avoid the range of the secured area N1 also when the user performs the task freely.
- the user can perform a free task with the safety managed while the cooking by the robotic kitchen 1 is smoothly achieved.
- the danger determination unit 263 determines that the danger is imminent.
- the danger determination unit 263 controls the projection control unit 255 to change the projection state of the dangerous area D1 of Fig. 53 into an indication state indicating the danger, for example, an indication state as shown in the dangerous area D1' in Fig. 54 with a color close to the primary color of yellow or red, blinking, or the like, to notify the user that the danger is imminent.
- the danger determination unit 263 controls the voice UI control unit 254 to output a voice V11, for example, "You are approaching the dangerous area” as shown in Fig. 54 , to notify the user that the danger is imminent.
- the user can visually or auditorily recognize that the user is approaching the dangerous area even if the user is approaching the dangerous area by making a careless movement in a state in which the user is not aware of the dangerous area. Therefore, the safety can be managed.
- the secured area and the dangerous area may be indicated in other ranges, and for example, the secured area and the dangerous area may be indicated on respective shelves of the cooking assistance units 31-1 to 31-6.
- the secured area and the dangerous area may be projected on the shelves of the cooking assistance units 31-1 to 31-6 as shown in Fig. 55 , for example.
- a color and a design indicating that it is an dangerous area D11 are projected on the second shelf in a high temperature state as shown in Fig. 55 .
- the user can recognize that a certain danger such as the high temperature exists in the range set as the dangerous area D11.
- the user can recognize the area in which the user is likely to encounter the danger. Therefore, the user can perform a free task that the user desires with the safety managed.
- a color and a design indicating that it is a secured area N11 are projected on the third shelf in which the target food ingredient is stored as shown in Fig. 55 .
- the user can recognize that the cooking arm 51 may be operated in the shelf of the cooking assistance unit 31-3, which is set as the secured area N11, in order to take out the target food ingredient for the next task process.
- the user can freely perform any task by avoiding the task near the secured area, with the safety managed by avoiding the interference with the cooking arm 51 in the next task process.
- the projection state (indication state) of the dangerous area D11 in Fig. 55 is changed to indicate to the user that the danger is imminent as shown in a dangerous area D11' in Fig. 56 .
- the projection state of the dangerous area D11 in Fig. 55 is changed into a projection state with a color close to the primary color of yellow or red, blinking, or the like, to notify the user that the danger is imminent, as shown in the dangerous area D11' in Fig. 56 .
- a voice V11 for example, "You are approaching the dangerous area” is output to notify the user that the danger is imminent.
- the user can visually or auditorily recognize that the user is approaching the dangerous area even if the user is approaching the dangerous area by making a careless movement in a state in which the user is not aware of the dangerous area. Therefore, the safety can be managed.
- the secured area and the dangerous area may be indicated in other ranges, and for example, the secured area and the dangerous area may be indicated on the top plate 921A of the robotic kitchen 901 of Fig. 32 .
- a dangerous area D21 is projected on the top plate 921A.
- the dangerous area D21 is projected with a color and a design with which the dangerous area D21 can be recognized as the dangerous area. Since the dangerous area D21 is projected in this manner, the user can recognize that the range set as the dangerous area D21 is a dangerous range in which the cooking arm 51-1 to which an edged tool like the knife attachment is attached is being operated.
- the user can recognize the area in which the user is likely to encounter the danger. Therefore, the user can perform a free task or eating and drinking that the user desires with the safety managed.
- the area to be used in the next task process is recognized as a secured area, and a color and a design indicating that it is a secured area N21 are projected.
- the user can recognize that the cooking arm 51 may be operated in the next task process within the range set as the secured area N21.
- the user can avoid the interference with the cooking arm 51 in the next task process by avoiding the task or eating and drinking near the secured area. Therefore, the user can freely perform some task or eat and drink with the safety managed.
- the projection state of the dangerous area D21 of Fig. 57 is changed to indicate to the user that the danger is imminent.
- the projection state of dangerous area D21 of Fig. 57 is changed into a projection state with a color close to the primary color of yellow or red, blinking, or the like, to notify the user that the danger is imminent, as shown in a dangerous area D21' of Fig. 58 .
- a voice V11 for example, "You are approaching the dangerous area” is output by a voice to notify the user that the danger is imminent.
- the user can visually or auditorily recognize that the user is approaching the dangerous area even if the user is approaching the dangerous area by making a careless movement in a state in which the user is not aware of the dangerous area. Therefore, the safety can be managed.
- the secured area and the dangerous area may be enabled to be recognized by a physical method such that the safety can be managed.
- a cylindrical cover 1171 may be provided above the top plate portion 921, the cylindrical cover 1171 having a diameter of substantially the same size as the outer circumferential portion, and a curtain 1172 capable of changing the distance from the center position of the circular top plate portion 921 may be further provided inside the cover 1171.
- the upper part of the figure shows a top view of the curtain 1172 and the top plate portion 921 and the lower part of the figure shows a side view of the cover 1171, the curtain 1172, and the top plate portion 921.
- the curtain 1172 is configured to be capable of variably changing the distance from a center 921C of the top plate portion 921 within the range of the top plate 921A. Moreover, the curtain 1172 is fire-proof and heat resistant and also knife-proof.
- the curtain 1172 is suspended via, for example, a magnet-like fastener that is movable in a state in which the fastener attracts a metal ceiling plate in the cover 1171 provided facing the top plate portion 921.
- the movement of the fastener is controlled by the dangerous area detection unit 261, secured area determination unit 262, and the danger determination unit 263, and the fastener can be moved in the attracting state in the cover 1171.
- the curtain 1172 is operated to cover and hidden a secured area NZ and a dangerous area DZ as shown in the upper part of Fig. 59 on the basis of the information regarding the dangerous area set in the dangerous area detection unit 261 and the secured area determined by the secured area determination unit 262.
- the curtain 1172 changes its shape to isolate the space above the secured area NZ and the dangerous area DZ from the space in which the user performs a task or eating or drinking.
- the user can recognize the danger and move the hand away from the secured area NZ or the dangerous area DZ Moreover, even if the user completely inserts the hand into the secured area NZ or the dangerous area DZ, the user can be prevented from being damaged, for example, getting burned, getting cut by a knife, or being spattered with food ingredients and the like in the dangerous area because the curtain 1172 is fire-proof and heat resistant and also knife-proof.
- the secured area NZ and the dangerous area DZ may be projected by the projector 208, and the danger determination unit 263 may operate the curtain 1172 to cover and hidden the dangerous area DZ as shown in the upper part of Fig. 59 such that the user does not encounter the danger when the user approaches a position whose distance from the dangerous area DZ is smaller than the predetermined distance.
- the projector 208 is installed downward from the ceiling portion of the cover 1171 as shown in the lower portion of Fig. 59 .
- Step S1 the cooking process management unit 241 selects which dish to make.
- Step S2 the cooking process management unit 241 acquires the condition related to the cooking.
- conditions such as the number of cooking arms 51 and the usable attachment types are detected and acquired.
- Step S3 the cooking process management unit 241 acquires the condition related to the person who eats the dish.
- conditions such as the number, gender, age, and the like of people are detected and acquired.
- the recognition result of the peripheral state by the peripheral state recognition unit 250, the recognition result of the state of the person by the person state recognition unit 251, and the like are used as appropriate.
- the information regarding the dish selected to be made and the information regarding the conditions acquired by the cooking process management unit 241 are supplied to the recipe data acquisition unit 246.
- Step S4 the recipe data acquisition unit 246 reads and acquires recipe data corresponding to the conditions from the recipe data storage unit 245.
- the recipe data corresponding to the conditions may be generated by the recipe data processing unit 247 by performing the processing as described above.
- the recipe data acquired by the recipe data acquisition unit 246 is supplied to the cooking process management unit 241, and then used for the cooking.
- Part 1 cooking processing (Part 1) of the robotic kitchen 1 that performs the cooking will be described with reference to the flowchart of Fig. 61 .
- Fig. 61 The processing of Fig. 61 is started at a predetermined timing such as a timing at which it is detected that the user who performs the collaborative task is present near the robotic kitchen 1, for example.
- Step S11 the cooking process management unit 241 focuses on one task described in the recipe data.
- the task to be focused will be also referred to as the focus task.
- Step S12 the cooking process management unit 241 determines whether or not the focus task is a solo task performed by the robotic kitchen 1 alone.
- Step S12 In a case where it is determined in Step S12 that the focused task is the solo task, the processing proceeds to Step S13.
- Step S13 the dangerous area detection unit 261 detects and sets the dangerous area on the basis of the recognition results of the peripheral state recognition unit 250 and the person state recognition unit 251.
- Step S14 the cooking process management unit 241 controls the projection control unit 255 to project the dangerous area detected by the projector 208 to the corresponding range.
- Step S15 the secured area determination unit 262 determines the next task on the basis of the recipe data.
- Step S16 the secured area determination unit 262 determines, on the basis of the recipe data, a range necessary for the next task to be performed as a secured area. It should be noted that in a case where the next process does not exist, the processing of Steps S15 and S16 is skipped.
- Step S17 the cooking process management unit 241 controls the projection control unit 255 to project the secured area determined by the projector 208 to the corresponding range.
- information indicating time and the like for predicting how many minutes later the secured area will be used may be projected on the secured area in accordance with the recipe data or the progress of cooking. More specifically, for example, a message, for example, "It is an area to be used about 10 minutes later" may be projected on the secured area.
- the user can visually recognize the range in which the cooking arm 51 may be operated in the next task as the secured area.
- Step S18 the arm control unit 243 controls the position and operation of each cooking arm 51 in accordance with the description of the recipe data.
- the task information of the focused task is supplied to the arm control unit 243 from the cooking process management unit 241.
- Step S19 the danger determination unit 263 recognizes the distance between the set dangerous area and the user on the basis of the recognition results of the peripheral state recognition unit 250 and the person state recognition unit 251 and determines whether or not a distance T between both is smaller than a predetermined distance d.
- Step S19 In a case where it is determined in Step S19 that the distance T between the dangerous area and the user is smaller than the predetermined distance d and the danger is imminent, the processing proceeds to Step S20.
- Step S20 the danger determination unit 263 controls the projection control unit 255 and the voice UI control unit 254 to change the projection state of the dangerous area by the projector 208 or notify that the danger is imminent by a voice from the speaker 209.
- Step S21 the cooking process management unit 241 determines whether or not the focus task is complete, and if not, the processing returns to Step S19.
- Step S19 In a case where it is determined in Step S19 that the distance between the dangerous area and the user is not smaller than the predetermined distance d and the danger is not imminent, the processing proceeds to Step S24.
- Step S24 the action prediction unit 264 predicts the user's action on the basis of the recognition results of the peripheral state recognition unit 250 and the person state recognition unit 251 and supplies a prediction result to the prediction result response unit 265.
- Step S25 the prediction result response unit 265 controls the unit control unit 244, the projection control unit 255, and the voice UI control unit 254 on the basis of the action prediction result to operate the cooking assistance system 31, to change the projection state by the projector 208, or to perform a response operation to support the user's action by a voice from the speaker 209.
- Step S24 In a case where the next action cannot be predicted in Step S24, the processing of Steps S24 and S25 may be skipped.
- Steps S19 to S21, S24, and S25 are repeated until the focus task is completed.
- Step S21 In a case where it is determined in Step S21 that the focus task is complete, the processing proceeds to Step S22.
- Step S22 the cooking process management unit 241 determines whether or not all tasks are complete. In a case where it is determined in Step S22 that all the tasks are not complete, the cooking process management unit 241 returns to Step S11 and repeats the subsequent processing using the next task as a focus task.
- Step S12 In a case where it is determined in Step S12 that the focus task is not a solo task, the focus task is considered as a collaborative task and the processing proceeds to Step S23.
- Step S23 the cooking process management unit 241 controls the voice UI control unit 254 and the projection control unit 255 to notify the user that a predetermined task is to be performed, and the processing proceeds to Step S13.
- the collaborative task is performed by the user and the robotic kitchen 1.
- Step S22 In a case where it is determined in Step S22 that all the tasks are complete, the processing ends.
- the indication is performed such that the user can visually or auditorily recognize that the user is approaching to the dangerous area.
- the cooking can be enjoyed with the safety managed.
- the user's action is predicted and a support operation for the predicted action is performed, such that the user can smoothly use a necessary cooking tool.
- a support operation for the predicted action is performed, such that the user can visually or auditorily recognize that the user is approaching the dangerous area.
- the dangerous area may be indicated when the distance between the user and the dangerous area is equal to or smaller than the predetermined distance and the dangerous area may be prevented from being indicated when the distance between the user and the dangerous area is not equal to or smaller than the predetermined distance may be employed.
- the indication of the dangerous area may be changed in accordance with the distance between the user and the dangerous area.
- a distance T1 between the user H1 and the dangerous area D51 is smaller than a predetermined distance d1 and larger than a predetermined distance d2 (d2 ⁇ T1 ⁇ d1) as shown in Fig. 62 . Therefore, the dangerous area D51 is indicated with a pattern PT1 which is a color and a design to be set in accordance with the distance as shown in the upper part of the figure.
- a distance T2 between the user H1 and the dangerous area D1" is smaller than a distance d2 smaller than the predetermined distance d1 (T2 ⁇ d2) as shown in Fig. 62 . Therefore, the dangerous area D1" is indicated with a pattern PT2 which is a color and a design indicating a higher degree of danger, the pattern PT2 being denser than the color and the design indicated in the dangerous area D51.
- the density of the color is expressed by the line intervals of the dangerous areas D1" and D5 expressed with the lattice pattern, a denser color is indicated with the pattern PT2 with the line intervals shorter than those of the pattern PT1, and a state in which the dangerous areas D1" is more dangerous is expressed.
- the danger determination unit 263 changes the color and the design to be indicated in accordance with the distance between the dangerous area D1" or D51 and the user H1 on the basis of the recognition results of the peripheral state recognition unit 250 and the person state recognition unit 251, such that the degree of danger depending on the distance can be easily visually recognized.
- the danger determination unit 263 may control the voice UI control unit 254 to notify that the danger is imminent by a voice in accordance with the distance between the dangerous area D1" or D51 and the user H1.
- a moderate expression for example, "You are approaching the dangerous area” is used when some distance remains between the user H1 and the dangerous area D1" or D51 and the user H1 is relatively far from the dangerous area D1" or D51.
- the indication is performed such that the high degree of emergency can be easily recognized with an expression which is at high sound volume, short, and easy to understand, for example, "Watch out”, “Danger”, or “Stay away", and the dangerous area can be quickly avoided.
- the indication method of the dangerous area is changed in accordance with the distance between the dangerous area and the user in this manner, it is possible to cause the difference in the degree of danger to be visually or auditorily recognized.
- the indication (projection) may be changed with more colors or designs in accordance with the distance.
- the indication state of the dangerous area may be changed in accordance with the type of danger and the degree of danger in the dangerous area.
- the indication state of the secured area may be changed in accordance with the type of danger or the degree of danger depending on the content of the next task.
- the indication method of the dangerous area is changed on the top plate 21A of Fig. 1 in accordance with the distance between the user and the dangerous area
- the indication may be similarly changed also in the case of projecting on each shelf of the cooking assistance units 31-1 to 31-6.
- the density of the color indicated as the dangerous area D11' is changed in accordance with the distance between the user H11 and the dangerous area D11' .
- the dangerous area D11' in Fig. 63 is indicated with the pattern PT2 in Fig. 62 and the dangerous area D11 in Fig. 55 is indicated with the pattern PT1 in Fig. 62 . That is, in the dangerous area D11' in Fig. 63 , a state in which the distance T from the user H11 is smaller and the danger to the user H11 is more imminent as compared to the dangerous area D11 in Fig. 55 is expressed.
- the indication method of the dangerous area by the voice may be changed in accordance with the distance between the user H11 and the dangerous area D11'.
- the indication method of the dangerous area is changed in accordance with the distance between the dangerous area and the user in this manner, it is possible to cause the difference in the degree of danger to be visually or auditorily recognized.
- the dangerous area indicated on the top plate 921A of the robotic kitchen 901 of Fig. 32 may also be changed in accordance with the distance to the user.
- the knife attachment is mounted on the cooking arm 51-1, and the vicinity where the baguette is sliced is regarded as a dangerous area, and the dangerous area D21' is projected on the top plate 921A.
- the indication method of the dangerous area D21' may be changed in accordance with a distance between the user H21 and the dangerous area D21'.
- the dangerous area D21' in Fig. 64 is indicated with the pattern PT2 in Fig. 62 and the dangerous area D21 in Fig. 57 is indicated with the pattern PT1 in Fig. 62 . That is, in the dangerous area D21' in Fig. 64 , a state in which the distance T from the user H21 is smaller and the danger to the user H21 is more imminent as compared to the dangerous area D21 in Fig. 57 is expressed.
- the indication method of the dangerous area by a voice may be changed in accordance with the distance between the user H21 and the dangerous area D21'.
- the indication method of the dangerous area is changed in accordance with the distance between the dangerous area and the user in this manner, it is possible to cause the difference in the degree of danger to be visually or auditorily recognized.
- Part 2 cooking processing (Part 2) of the robotic kitchen 1 to change the indication method of the dangerous area in accordance with the distance between the dangerous area and the user when performing cooking will be described with reference to the flowchart of Fig. 65 .
- Steps S31 to S38 and S43 to S47 is similar to the processing of Steps S11 to S18 and S21 to S25 in the flowchart of Fig. 61 , and thus the descriptions thereof will be omitted as appropriate.
- the indication method of the dangerous area indicated is a default indication method, and for example, the indication method described with reference to Fig. 61 may be used.
- the danger determination unit 263 determines whether or not the distance T between the dangerous area and the user is d2 ⁇ T ⁇ d1 on the basis of the recognition results of the peripheral state recognition unit 250 and the person state recognition unit 251. That is, the danger determination unit 263 determines whether or not the degree of danger is higher by one level than the default state.
- Step S39 In a case where it is determined in Step S39 that the distance T between the dangerous area and the user is d2 ⁇ T ⁇ d1, the processing proceeds to Step S40.
- Step S40 the danger determination unit 263 controls the projection control unit 255 to change and project the color and design of the dangerous area through the projector 208 such that it can be recognized that danger with a degree of danger higher by one level than that of the default state is imminent. By changing and indicating the color and design of the dangerous area in this manner, it is indicated to the user that the user has approached the dangerous area.
- Step S40 In a case where it is determined in Step S39 that the distance T between the dangerous area and the user is not d2 ⁇ T ⁇ d1, the processing of Step S40 is skipped.
- Step S41 the danger determination unit 263 determines whether or not the distance T between the dangerous area and the user is T ⁇ d2 on the basis of the recognition results of the peripheral state recognition unit 250 and the person state recognition unit 251. That is, the danger determination unit 263 determines whether or not it is a highly emergent state in which danger with a degree of danger higher by two or more levels than that of the default state is imminent.
- Step S41 In a case where it is determined in Step S41 that the distance T between the dangerous area and the user is T ⁇ d2, the processing proceeds to Step S42.
- Step S42 the danger determination unit 263 controls the projection control unit 255 to change and project the color and design of the dangerous area through the projector 208 such that it can be recognized that danger with a degree of danger higher by two or more levels than that of the default state and with a higher degree of emergency to avoid the danger is imminent.
- the danger determination unit 263 may control the voice UI control unit 254 to notify that the danger is imminent by a voice in accordance with the distance between the dangerous area and the user.
- Step S41 determines that the distance T between the dangerous area and the user is not T ⁇ d2
- the processing proceeds to Step S46.
- the indication method of the dangerous area is changed in accordance with the distance between the dangerous area and the user, and the dangerous area is indicated with a color and a design having higher visibility, such as a denser color as the distance becomes shorter, i.e., as the degree of emergency of the danger becomes higher. In this manner, it is possible to cause the higher degree of emergency to be recognized.
- the indication method of the dangerous area is changed in accordance with the distance from the user
- the indication method of the secured area and the dangerous area may be changed in accordance with whether the user is a child or an adult, for example.
- Fig. 66 in a case where the user is a child, there is a possibility that the child cannot visually recognize the information indicated on the top plate 21A because of his or her height, and in this case, there is a possibility that the user cannot recognize the secured area and the dangerous area.
- the cooking arms 51 are present on the top plate 21A and cooking tools and the like that can cause injuries are also present in the kitchen. Therefore, from the viewpoint of safety management, it is necessary to cause children to more reliably recognize the presence of the secured area and the dangerous area than adults.
- the danger determination unit 263 determines whether or not the user is a child in a case of performing the collaborative task. Moreover, when the user approaches the secured area N1 or the dangerous area D1 indicated by default such that a distance between the user and the secured area N1 or the dangerous area D1 is equal to or smaller than the predetermined distance, the danger determination unit 263 determines whether or not the approaching user is a child.
- the danger determination unit 263 determines whether or not the user is a child on the basis of the recognition results of the peripheral state recognition unit 250 and the person state recognition unit 251, for example, on the basis of the height, the body shape, and the presence or absence of the Adam's apple based on image recognition, the voice tone based on the voice, or the like. It should be noted that in Fig. 66 , a user H-K represents a child user.
- the danger determination unit 263 indicates a secured area N1-K and a dangerous area D1-K shown as the dotted lines of the figure, which are ranges larger than the indication ranges of the normal, secured area N1 and dangerous area D1 shown as the solid lines.
- the secured area N1-K and the dangerous area D1-K are indicated as ranges wider than the top plate 21A.
- the secured area N1-K and the dangerous area D1-K are indicated not only on the top plate 21A but also on the side surface portion of the main body of the robotic kitchen 1 and the floor, even a short child can recognize the secured area N1-K and the dangerous area D1-K.
- the danger determination unit 263 may control the voice UI control unit 254 to instruct to stay away from the secured area N1-K and the dangerous area D1-K by a voice from the speaker 209.
- the indication may be indicated with marks, patterns, or the like friendly to the child or the instruction may be performed by a voice using easy expressions when indicating the secured area N1-K and the dangerous area D1-K.
- the secured area and the dangerous area are indicated on the top plate 21A of Fig. 1 in a case where the user is a child
- the secured area and the dangerous area may be similarly indicated also in the case of projecting on the shelves of the cooking assistance units 31-1 to 31-6.
- Fig. 67 shows an example in which the third shelf of the cooking assistance unit 31-3 is indicated as the secured area N11 by default and the second shelf of the cooking assistance unit 31-6 is indicated as the dangerous area D11 by default.
- the normal, secured area N11 and dangerous area D11 are indicated, and a secured area N11-K and a dangerous area D11-K are indicated as shown as the dotted lines.
- the range of the secured area or the dangerous area may be indicated in another range, and for example, the range of the secured area or the dangerous area may be indicated on the top plate 921A of the robotic kitchen 901 of Fig. 32 .
- the vicinity of a place on the top plate 921A of the robotic kitchen 901, where a baguette is being sliced with the knife attachment attached to the cooking arm 51-1 is regarded as a dangerous area, and the dangerous area D21 is projected on the top plate 921A.
- the secured area N21 is indicated on the left side of the dangerous area D21 in the figure.
- a secured area N21-K and a dangerous area D21-K each having a wider range are indicated to the secured area N21 and the dangerous area D21 shown as the solid lines again.
- Part 3 cooking processing (Part 3) of the robotic kitchen 1 to change the indication method of the secured area and the dangerous area on the basis of whether the user is a child when performing cooking will be described with reference to the flowchart of Fig. 69 .
- Steps S61 to S65, S69, and S70 and S76 to S80 are similar to the processing of Steps S11 to S15, S17, and S18 and S21 to S25 in the flowchart of Fig. 61 , and thus the descriptions thereof will be omitted as appropriate.
- Step S66 the secured area determination unit 262 determines whether or not the task is a collaborative task and the user is a child.
- Step S66 in a case where the task is a collaborative task and the user is a child, the processing proceeds to Step S67.
- Step S67 the secured area determination unit 262 determines a range necessary for the next task to be performed on the basis of the recipe data as a secured area of a larger size in consideration of the fact that the user is a child.
- the secured area determination unit 262 determines a range necessary for the next task to be performed on the basis of the recipe data as a default secured area, and further determines a range larger than the default secured area by a predetermined ratio as a secured area considering that the user is a child.
- Step S66 in a case where the task is not a collaborative task and the user is not a child, the processing proceeds to Step S68, and the normal range necessary for the next task to be performed, i.e., the default secured area, is determined on the basis of the recipe data.
- Step S68 the cooking process management unit 241 controls the projection control unit 255 to project the secured area determined by the projector 208 on the corresponding range. At this time, in a case where the user is a child, a wider secured area considering that the user is a child is indicated.
- Step S71 the danger determination unit 263 determines whether or not the distance T between the dangerous area and the user is smaller than the predetermined distance d on the basis of the recognition results of the peripheral state recognition unit 250 and the person state recognition unit 251. In a case where it is determined in Step S71 that the distance T between the dangerous area and the user is smaller than the predetermined distance d, the processing proceeds to Step S72.
- Step S72 the danger determination unit 263 recognizes a user whose distance T from the dangerous area is smaller than the predetermined distance d on the basis of the recognition results of the peripheral state recognition unit 250 and the person state recognition unit 251. More specifically, the danger determination unit 263 recognizes whether the user who is present at the position whose distance T from the dangerous area is smaller than the predetermined distance d is an adult or a child.
- Step S73 the danger determination unit 263 determines whether or not the user whose distance T between the dangerous area and the user is smaller than the predetermined distance d is a child on the basis of the recognition result.
- the danger determination unit 263 determines whether or not every user approaching the secured area such that the distance between the user and the secured area is smaller than the predetermined distance is a child.
- Step S73 In a case where it is determined in Step S73 that the user is a child, the processing proceeds to Step S74.
- Step S74 the danger determination unit 263 controls the projection control unit 255 to change the projection state into a dangerous area of a size considering that the user is a child is wider than the default dangerous area and indicate the changed dangerous area through the projector 208.
- the danger determination unit 263 controls the voice UI control unit 254 to notify that the danger is imminent by a voice from the speaker 209.
- Step S73 determines that the user is not a child.
- Step S75 the danger determination unit 263 controls the projection control unit 255 and the voice UI control unit 254 to change the projection state of the dangerous area by the projector 208 or notify that the danger is imminent by a voice from the speaker 209. In this case, the size of the dangerous area is still the default size.
- the indication method may be changed in advance on the basis of whether or not the user is a child.
- the indication of the dangerous area can be changed by employing the processing in the flowchart of Fig. 69 to allow the dangerous area to be widely indicated only when the child approaches the dangerous area such that the distance between the child and the dangerous area is smaller than the predetermined distance d. As a result, it is possible to enhance the warning to the child.
- the indication method of the dangerous area is changed on the basis of whether or not the user is a child
- various attributes for example, whether the user is a child, an adult, a woman, a man, an adolescent, an elderly person, a handicapped person, or a healthy person may be recognized and the indication method of the dangerous area may be changed in accordance with the recognized attributes.
- the size of the secured area may be changed in accordance with the task content.
- a secured area of a range for the task performed by the cooking arm 51 may be set to be narrower and a secured area of a range for the task performed by the user may be set to be wider.
- Fig. 70 it is assumed that when the secured area determination unit 262 attempts to determine an area N1-C as a candidate of a secured area that is a range necessary for the next task to be performed on the basis of the recipe data, the user H1 is performing there some task or eating or drinking which is different from the recipe data.
- the secured area determination unit 262 determines whether or not an alternative area is present as the range necessary for the next task to be performed. For example, in a case where an area N1-N is present as the alternative area in Fig. 70 , the area N1-N is indicated as the secured area. In Fig. 70 , the area N1-N is indicated as the secured area.
- the secured area determination unit 262 controls the projection control unit 255 to project a message requesting to make the secured area open or controls the voice UI control unit 254 to output a message requesting to make the secured area open as a voice.
- the message is, for example, "Please stop your task and make the area open immediately because this area is needed for the next task” or "Please move to another place because this place is going to be used” and is a message requesting the user H1 to make the secured area open.
- the secured area determination unit 262 may search for an alternative area, set the alternative area as the secured area in a case where the alternative area is searched for, and make the requested area open to the user.
- the user H1 can perform the task or eating or drinking in a free space without delaying the cooking processing by the robotic kitchen 1 as long as the alternative area of the secured area is present.
- the secured area determination unit 262 attempts to indicate an area N21-C as a secured area on the top plate 921A on the basis of the recipe data as shown in Fig. 71 , for example, but the user H21 is currently performing some task in the area N21-C.
- the secured area determination unit 262 searches for an alternative area, and indicates an area N21-N as the secured area in a case where the area N21-N is searched out as the alternative area as shown in Fig. 71 , for example.
- the user H21 can perform the task or eating or drinking in a free space without delaying the cooking processing by the robotic kitchen 1 as long as the alternative area of the secured area is present.
- Part 4 cooking processing (Part 4) of the robotic kitchen 1 in which the alternative area is searched for in a case where the user is using the secured area when the secured area is indicated, and the alternative area is indicated as the secured area in a case where the alternative area is present will be described with reference to the flowchart of Fig. 72 .
- Steps S91 to S96 and S101 to S109 is similar to the processing of Steps S11 to S27 in the flowchart of Fig. 61 , and thus the descriptions thereof will be omitted as appropriate.
- Step S97 the secured area determination unit 262 determines whether or not the user is performing some task in the determined secured area on the basis of the recipe data on the basis of the recognition results of the peripheral state recognition unit 250 and the person state recognition unit 251.
- Step S97 for example, in a case where the user H1 is performing some task in the area N1-C determined as the secured area as shown in Fig. 70 , the processing proceeds to Step S98.
- Step S98 the secured area determination unit 262 determines whether or not an alternative area of the secured area is present. Specifically, the secured area determination unit 262 searches for an area in which the task content of the next task can be performed from an area other than the area determined as the secured area, to thereby determine whether or not it is present.
- the alternative area is, for example, an area which is not the best area for performing the next task, but it is, for example, a range which can secure a necessary cooking arm 51 and from which the secured cooking arm 51 can access each shelf of the cooking assistance units 31-1 to 31-6 which is necessary for the next task. Moreover, in a case where the next task is a task by the user, it is a range in which the task by the user can be performed.
- the secured area determination unit 262 determines the alternative area as the secured area in Step S99.
- Step S98 determines that the alternative area is not present.
- Step S100 the secured area determination unit 262 controls the projection control unit 255 to project a message prompting to make the secured area open and controls the voice UI control unit 254 to output a message prompting to make the secured area open as a voice. Then, the processing returns to Step S97.
- Steps S97, S98, and S100 the processing of Steps S97, S98, and S100 is repeated and the projection and the voice output of the messages prompting to make the secured area open are repeated until the secured area is made open.
- Step S97 in a case where the secured area is made open, i.e., in a case where the secured area is not used, the processing proceeds to Step S101. That is, in this case, the initially determined secured area is indicated.
- the user H1 can perform the task or eating or drinking in a free space without delaying the cooking processing by the robotic kitchen 1 as long as the alternative area of the secured area is present.
- the safety of the user can be enhanced by configuring various tasks to be performed in areas away from the dangerous area.
- the secured area when the secured area is set, it may be confirmed whether or not an alternative area away from the dangerous area is present in a case where the secured area is located near the dangerous area, and the alternative area may be indicated as the secured area in a case where the alternative area is present.
- the secured area determination unit 262 determines the area N1-C as the secured area which is a range necessary for the next task to be performed on the basis of the recipe data.
- the secured area determination unit 262 determines whether or not a dangerous area is present near the area N1-C determined as the secured area.
- an area to the right of the area N1-C is set as the dangerous area D1. Therefore, in Fig. 73 , it is considered that the dangerous area D1 is present near the area N1-C determined as the secured area.
- the secured area determination unit 262 determines whether or not an alternative area away from the dangerous area D1 is present.
- the area N1-N away from the dangerous area D1 is searched out as the alternative area, and it is thus considered that the alternative area is present.
- the secured area determination unit 262 determines the area N1-N, which is the alternative area, as the secured area.
- this processing is also a processing of guiding the user to the position away from the dangerous area, and the safety can be managed by avoiding approach to the dangerous area without making the user aware of the position of the dangerous area. As a result, the safety can be managed with higher accuracy.
- the area determined as the secured area is an area N11-C including the second shelf from the top of the cooking assistance unit 31-5 while the second shelf from the top of the cooking assistance unit 31-6, which is an adjacent shelf, is set as the dangerous area D11.
- the secured area determination unit 262 determines whether or not the alternative area is present away from the dangerous area D11.
- an area N11-N including the third shelf from the top of the cooking assistance unit 31-3, which is away from the dangerous area D11, is searched out as the alternative area, and it is thus considered that the alternative area is present.
- the secured area determination unit 262 indicates the area N11-N, which is the alternative area, as the secured area.
- the secured area is set in the area away from the dangerous area as long as the alternative area is present. Therefore, the frequency at which the user approaches the dangerous area is lowered. As a result, the safety can be managed with higher accuracy.
- each shelf has an individual function in the respective shelves of the cooking assistance units 31-1 to 31-6
- the shelf searched out as the alternative area is a shelf having the same function as the shelf searched out as the secured area or a substitutable function.
- the secured area determination unit 262 attempts to indicate the area N21-C as the secured area on the top plate 921A on the basis of the recipe data as shown in Fig. 75 , for example, but the dangerous area D21 is present near the area N21-C.
- the secured area determination unit 262 searches for an alternative area, and indicates the area N21-N as the secured area in a case where the area N21-N is searched out as the alternative area as shown in Fig. 75 , for example.
- the secured area is set in the area away from the dangerous area as long as the alternative area is present. Therefore, the frequency at which the user approaches the dangerous area is lowered.
- Steps S121 to S126 and S130 to S138 is similar to the processing of Steps S11 to S25 in the flowchart of Fig. 61 , and thus the descriptions thereof will be omitted as appropriate.
- Step S127 the secured area determination unit 262 determines whether or not a dangerous area is present near the determined secured area on the basis of the recipe data on the basis of the recognition results of the peripheral state recognition unit 250 and the person state recognition unit 251.
- Step S127 for example, in a case where the dangerous area D1 is present next to the area N1-C determined as the secured area as shown in Fig. 73 , it is considered that the dangerous area is present near the determined secured area, and the processing proceeds to Step S128.
- the secured area determination unit 262 determines whether or not an alternative area of the secured area is present at a position away from the dangerous area. Specifically, the secured area determination unit 262 searches for an area in which the task content of the next task can be performed and which is farther than the predetermined distance from the dangerous area from an area other than the area determined as the secured area, to thereby determine whether or not it is present.
- the secured area determination unit 262 determines the alternative area as the secured area in Step S129.
- Step S127 determines that the dangerous area is not present near the determined secured area or in a case where it is determined in Step S128 that the alternative area is not present.
- the processing of Step S129 is skipped. That is, in this case, the secured area determined in the Step S129 is indicated as it is.
- the secured area is set to the area away from the dangerous area as long as the alternative area is present.
- it is possible to guide the user to the position away from the dangerous area and to cause the user to avoid approach to the dangerous area without making the user aware of the position of the dangerous area.
- cooking tools necessary for the current process task may be indicated to the user.
- knives 291-1 to 291-3 are placed on the top plate 21A as shown in Fig. 77 . It should be noted that when it is not especially necessary to distinguish the knives 291-1 to 291-3 from one another, those will be simply referred to as knives 291.
- the knives 291-1 to 291-3 are each an internet of things (IoT) knife that communicates with the robotic kitchen 1 (or 901) and causes a built-in light emitting unit 304 ( Figs. 78 and 79 ) to emit light in a case where it is a cooking tool necessary for the task.
- IoT internet of things
- Fig. 77 the handle portion of the knife 291-2 of the knives 291-1 to 291-3 emits light, and it is shown that the knife 291-2 is a cooking tool necessary for the current task.
- the user can smoothly select and use the cooking tool necessary for the task by visually selecting the cooking tool emitting light.
- Fig. 78 is an external perspective view of the IoT knife 291
- Fig. 79 is a hardware configuration diagram of the IoT knife 291.
- the IoT knife 291 includes a blade 291A and a handle 291B, and the user grasps the handle 291B and cuts a food ingredient with the blade 291A. That is, the external structure of the IoT knife 291 is similar to that of a generally-used knife as a cooking tool.
- the handle 291B has a skeleton structure, for example, and includes a controller 301, a communication unit 302, a vibrator 303, the light emitting unit 304, and a speaker 305.
- the controller 301 is constituted by a computer including a central processing unit (CPU), a read only memory (ROM), a random access memory (RAM), a flash memory, and the like.
- the controller 301 executes a predetermined program by the CPU and controls general operations of the IoT knife 291.
- the computer constituting the controller 301 is housed inside the handle 291B and functions as a control device that controls the operation of the IoT knife 291.
- the communication unit 302 is controlled by the controller 301 to communicate with the robotic kitchen 1 or 901 and transmit and receive various types of data and programs. Moreover, when the communication unit 302 is notified of a command indicating that it is a cooking tool to be used in the task by the robotic kitchen 1 or 901 on the basis of the recipe data, the communication unit 302 receives the command and outputs the command to the controller 301.
- the vibrator 303 is constituted by a vibrator controlled by the controller 301 and causes the user to recognize a predetermined timing, the presence or absence of the notification, or the like, for example, by vibration.
- the light emitting unit 304 is constituted by a light emission diode (LED) and the like, for example, and is controlled by the controller 301 to emit light when a command indicating that it is the cooking tool to be used in task is received, for example.
- LED light emission diode
- the speaker 305 is controlled by the controller 301 to output a predetermined voice when it is the cooking tool to be used in the task, for example.
- Part 6 cooking processing (Part 6) of the robotic kitchen 1 in which the IoT knife 291 to be used in the task is caused to emit light on the basis of the recipe data, to thereby indicate to the user that it is the cooking tool to be used in the task will be described with reference to the flowchart of Fig. 80 .
- Steps S151 to S163, S166, and S167 is similar to the processing of Steps S11 to S25 in the flowchart of Fig. 61 , and thus the descriptions thereof will be omitted as appropriate.
- Step S164 the cooking process management unit 241 determines the cooking tool necessary for the task on the basis of the recipe data.
- Step S165 the cooking process management unit 241 controls the communication unit 211 to notify the determined cooking tool of a command for causing the cooking tool to emit light to indicate that it is the cooking tool necessary for the task.
- the cooking process management unit 241 controls the communication unit 211 to transmit a command instructing the IoT knife 291 to cause the light emitting unit 304 to emit light to the IoT knife 291.
- the controller 301 of the IoT knife 291 controls the communication unit 302 to receive this command, the controller 301 of the IoT knife 291 controls the light emitting unit 304 to emit light.
- the user can recognize that one of the IoT knives 291, which emits light from the light emitting unit 304 of the handle 291B, is the cooking tool necessary for the task.
- the prediction result response unit 265 controls the unit control unit 244, the projection control unit 255, and the voice UI control unit 254 on the basis of the action prediction result to operate each shelf of the cooking assistance units 31-1 to 31-6, change the projection state by the projector 208, or perform a response operation to support the user's action by a voice from the speaker 209.
- next action predicted by detecting the user's action of taking out a food ingredient is, for example, a task of chopping the taken-out food ingredient with the IoT knife 291-2.
- the prediction result response unit 265 controls the communication unit 211 to transmit a command for causing the light emitting unit 304 of the handle 291B to emit light to the selected IoT knife 291-2 as a response operation to support the user's action.
- the controller 301 of the IoT knife 291-2 controls the communication unit 302 to receive the transmitted command, and causes the light emitting unit 304 of the handle 291B to emit light in accordance with the command.
- the controller 301 may cause the light emitting unit 304 to emit light and the speaker 305 to output a message voice indicating that it is the cooking tool necessary for the task or cause the vibrator 303 to vibrate with a predetermined rhythm.
- the cooking process management unit 241 may control the projection control unit 255 to cause the projector 208 to project a mark, a design, a message, or the like indicating that it is the cooking tool necessary for the task on the handle or blade portion of the knife necessary for the task of interest by projection mapping or the like.
- the example in which the IoT knife 291-2 is selected as the cooking tool necessary for the task has been described above, another one may be used as long as it is a cooking tool, and for example, other cooking tools such as a chopping board and a frying pan may be provided with functions similar to the vibrator 303, the light emitting unit 304, and the speaker 305.
- other cooking tools such as a chopping board and a frying pan
- at least one of an operation of causing the vibrator 303 to vibrate, an operation of causing the light emitting unit 304 to emit light, or an operation of causing the speaker 305 to output a voice may be performed in a case where it is the cooking tool necessary for task.
- the cooking tool necessary for the next task of the current task may be indicated, for example, as in the case where the above-mentioned secured area is indicated.
- the operation of the robotic kitchen 1 is controlled by the controller 201 installed in the robotic kitchen 1, the operation may be controlled by an external device.
- Fig. 81 is a diagram showing a configuration example of a control system.
- the control system shown in Fig. 81 is configured by connecting the robotic kitchen 1 and a cooking control server 1501 via a network such as the Internet.
- the robotic kitchen 1 and the cooking control server 1501 communicate with each other via the network.
- the processing of the robotic kitchen 1 as described above is performed by the cooking control server 1501 which is the external device of the robotic kitchen 1. That is, at least some of the functional units of the controller 201 described with reference to Fig. 45 are realized in the cooking control server 1501 by executing a predetermined program.
- the cooking control server 1501 receives the information transmitted from the robotic kitchen 1 and controls the operation of the cooking arm 51 on the basis of the recipe data to thereby perform each task of the cooking in the robotic kitchen 1.
- the cooking control server 1501 functions as a control device that controls the action of the robotic kitchen 1.
- control device that controls the action of the robotic kitchen 1 may be provided outside the robotic kitchen 1.
- the above-mentioned series of processing may be performed by hardware or may be performed by software.
- a program including the software is installed in a computer incorporated in dedicated hardware, a general-purpose personal computer, or the like from a program recording medium.
- Fig. 82 is a block diagram showing a configuration example of hardware of a computer that executes the above-mentioned series of processing using a program.
- a central processing unit (CPU) 2001, a read only memory (ROM) 2002, and a random access memory (RAM) 2003 are interconnected by a bus 2004.
- the input/output interface 2005 is further connected to the bus 2004.
- An input unit 2006 including a keyboard, a mouse, and the like and an output unit 2007 including a display, a speaker, and the like are connected to the input/output interface 2005.
- the input/output interface 2005 is connected to a storage unit 2008 including a hard disk, a nonvolatile memory, and the like, a communication unit 2009 including a network interface and the like, and a drive 2010 that drives a removable medium 2011.
- the CPU 2001 loads the program stored in the storage unit 2008 into the RAM 2003 via the input/output interface 2005 and the bus 2004 and executes the program for executing the above-mentioned series of processing.
- the program executed by the CPU 2001 is provided, recorded on the removable medium 2011 or via a wired or wireless transmission medium such as a local area network, the Internet, and digital broadcasting, and is installed in the storage unit 2008.
- the program executed by the computer may be a program in which processes are chronologically performed in the order described herein or may be a program in which processes are performed in parallel or each process is performed at a necessary timing such as a timing of calling.
- system set forth herein means a set of a plurality of components (such as devices and modules (parts)) and it does not matter whether all of the components are in the same housing.
- a plurality of devices housed in separate housings and connected to one another via a network and a single device in which a plurality of modules is housed in a single housing are both systems.
- Embodiments of the present technology are not limited to the above-mentioned embodiment, and various modifications can be made without departing from the gist of the present technology.
- the present technology may take a cloud computing configuration in which a plurality of devices shares a single function and collaboratively processes the single function via a network.
- the plurality of processes included in the single step may be performed by a single device or may be shared and performed by a plurality of devices.
- the present technology can also take the following configurations.
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- General Engineering & Computer Science (AREA)
- Robotics (AREA)
- Physics & Mathematics (AREA)
- Theoretical Computer Science (AREA)
- Multimedia (AREA)
- General Physics & Mathematics (AREA)
- Food Science & Technology (AREA)
- Social Psychology (AREA)
- Human Computer Interaction (AREA)
- Psychiatry (AREA)
- General Health & Medical Sciences (AREA)
- Computer Vision & Pattern Recognition (AREA)
- Health & Medical Sciences (AREA)
- Manipulator (AREA)
- Food-Manufacturing Devices (AREA)
- Combinations Of Kitchen Furniture (AREA)
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2018193153 | 2018-10-12 | ||
| PCT/JP2019/038089 WO2020075526A1 (fr) | 2018-10-12 | 2019-09-27 | Système de préparation d'aliments, procédé de commande d'un système de préparation d'aliments et programme |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| EP3865032A1 true EP3865032A1 (fr) | 2021-08-18 |
| EP3865032A4 EP3865032A4 (fr) | 2021-12-08 |
| EP3865032B1 EP3865032B1 (fr) | 2023-03-29 |
Family
ID=70164518
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP19872123.5A Active EP3865032B1 (fr) | 2018-10-12 | 2019-09-27 | Système de préparation d'aliments, procédé de commande d'un système de préparation d'aliments et programme |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US20210387363A1 (fr) |
| EP (1) | EP3865032B1 (fr) |
| JP (1) | JP7338633B2 (fr) |
| CN (1) | CN113015471A (fr) |
| WO (1) | WO2020075526A1 (fr) |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US11945117B2 (en) * | 2021-03-10 | 2024-04-02 | Samsung Electronics Co., Ltd. | Anticipating user and object poses through task-based extrapolation for robot-human collision avoidance |
| US11833691B2 (en) | 2021-03-30 | 2023-12-05 | Samsung Electronics Co., Ltd. | Hybrid robotic motion planning system using machine learning and parametric trajectories |
Family Cites Families (15)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2000202790A (ja) * | 1999-01-14 | 2000-07-25 | Sharp Corp | ロボット装置 |
| JP2001048317A (ja) * | 1999-08-05 | 2001-02-20 | Itoki Crebio Corp | 物品管理システム用のタグ装置、物品管理システムにおける物品格納方法及び物品管理システム |
| US8276505B2 (en) * | 2004-02-18 | 2012-10-02 | David Benjamin Buehler | Food preparation system |
| JP2005242495A (ja) * | 2004-02-24 | 2005-09-08 | Matsushita Electric Works Ltd | 調理情報検索システム |
| JP2008296308A (ja) * | 2007-05-30 | 2008-12-11 | Panasonic Corp | 家事支援ロボットアームの移動制御システムおよび移動制御方法および移動制御プログラム |
| WO2009071567A1 (fr) * | 2007-12-05 | 2009-06-11 | Abb Research Ltd | Chaîne de production et son procédé de fonctionnement |
| JP2010120139A (ja) * | 2008-11-21 | 2010-06-03 | New Industry Research Organization | 産業用ロボットの安全制御装置 |
| JP2012236244A (ja) * | 2011-05-10 | 2012-12-06 | Sony Corp | ロボット装置、ロボット装置の制御方法、並びにロボット装置制御用プログラム |
| JP5978028B2 (ja) | 2012-06-28 | 2016-08-24 | 本田技研工業株式会社 | 移動ロボットの制御装置 |
| JP2014008532A (ja) * | 2012-07-03 | 2014-01-20 | Hikari Seisakusho:Kk | 密閉型矩形容器の製作方法 |
| JP6008123B2 (ja) * | 2013-02-04 | 2016-10-19 | セイコーエプソン株式会社 | 警報装置 |
| WO2015125017A2 (fr) * | 2014-02-20 | 2015-08-27 | Mark Oleynik | Procédés et systèmes de préparation des aliments dans une cuisine robotisée |
| JP6824622B2 (ja) | 2015-05-01 | 2021-02-03 | キヤノン株式会社 | ロボットの制御装置、制御方法およびシステム |
| JP6554945B2 (ja) * | 2015-07-03 | 2019-08-07 | 株式会社デンソーウェーブ | ロボットシステム |
| WO2018165038A1 (fr) * | 2017-03-06 | 2018-09-13 | Miso Robotics, Inc. | Système de préparation d'aliments à réalité augmentée et procédés associés |
-
2019
- 2019-09-27 EP EP19872123.5A patent/EP3865032B1/fr active Active
- 2019-09-27 WO PCT/JP2019/038089 patent/WO2020075526A1/fr unknown
- 2019-09-27 JP JP2020550383A patent/JP7338633B2/ja active Active
- 2019-09-27 CN CN201980065745.7A patent/CN113015471A/zh not_active Withdrawn
- 2019-09-27 US US17/282,905 patent/US20210387363A1/en active Pending
Also Published As
| Publication number | Publication date |
|---|---|
| CN113015471A (zh) | 2021-06-22 |
| JP7338633B2 (ja) | 2023-09-05 |
| JPWO2020075526A1 (ja) | 2021-09-02 |
| EP3865032B1 (fr) | 2023-03-29 |
| EP3865032A4 (fr) | 2021-12-08 |
| US20210387363A1 (en) | 2021-12-16 |
| WO2020075526A1 (fr) | 2020-04-16 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US11117253B2 (en) | Methods and systems for food preparation in a robotic cooking kitchen | |
| US20210394371A1 (en) | Cooking arm and cooking system | |
| AU2018306475A1 (en) | Systems and methods for operations a robotic system and executing robotic interactions | |
| EP3865032B1 (fr) | Système de préparation d'aliments, procédé de commande d'un système de préparation d'aliments et programme | |
| US20210394368A1 (en) | Transportation movable object | |
| EP3861906A1 (fr) | Système de préparation d'aliments | |
| US20210386248A1 (en) | Cooking system | |
| JP6989683B2 (ja) | 音声制御調理器具プラットフォーム | |
| WO2020071147A1 (fr) | Fixation pour bras de cuisson | |
| CN112068526B (zh) | 用于在机器人烹饪厨房中制备食物的方法和系统 | |
| CN107775646A (zh) | 用于指导烹饪的厨房机器人 | |
| KR20220039707A (ko) | 정보 처리 장치, 정보 처리 방법, 조리 로봇, 조리 방법, 및 조리 기구 | |
| Crenshaw | The giving of food |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: THE INTERNATIONAL PUBLICATION HAS BEEN MADE |
|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: REQUEST FOR EXAMINATION WAS MADE |
|
| 17P | Request for examination filed |
Effective date: 20210331 |
|
| AK | Designated contracting states |
Kind code of ref document: A1 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| A4 | Supplementary search report drawn up and despatched |
Effective date: 20211105 |
|
| RIC1 | Information provided on ipc code assigned before grant |
Ipc: G06N 20/00 20190101ALI20211101BHEP Ipc: F16P 3/14 20060101ALI20211101BHEP Ipc: F16P 3/00 20060101ALI20211101BHEP Ipc: F16P 1/02 20060101ALI20211101BHEP Ipc: B25J 19/06 20060101ALI20211101BHEP Ipc: A47J 43/04 20060101AFI20211101BHEP |
|
| DAV | Request for validation of the european patent (deleted) | ||
| DAX | Request for extension of the european patent (deleted) | ||
| GRAP | Despatch of communication of intention to grant a patent |
Free format text: ORIGINAL CODE: EPIDOSNIGR1 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: GRANT OF PATENT IS INTENDED |
|
| INTG | Intention to grant announced |
Effective date: 20221025 |
|
| RIN1 | Information on inventor provided before grant (corrected) |
Inventor name: TOTSUKA, NORIKO Inventor name: CINCAREK, TOBIAS Inventor name: YAMAMOTO, SHOHEI Inventor name: OGAWA, HIROAKI Inventor name: OCHIAI, KAZUKI Inventor name: SUZUKI, HIROTAKA Inventor name: WATANABE, KANAKO |
|
| GRAS | Grant fee paid |
Free format text: ORIGINAL CODE: EPIDOSNIGR3 |
|
| GRAA | (expected) grant |
Free format text: ORIGINAL CODE: 0009210 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: THE PATENT HAS BEEN GRANTED |
|
| AK | Designated contracting states |
Kind code of ref document: B1 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: EP |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R096 Ref document number: 602019027031 Country of ref document: DE |
|
| REG | Reference to a national code |
Ref country code: AT Ref legal event code: REF Ref document number: 1556094 Country of ref document: AT Kind code of ref document: T Effective date: 20230415 |
|
| REG | Reference to a national code |
Ref country code: NL Ref legal event code: FP Ref country code: IE Ref legal event code: FG4D |
|
| REG | Reference to a national code |
Ref country code: LT Ref legal event code: MG9D |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: RS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20230329 Ref country code: NO Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20230629 Ref country code: LV Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20230329 Ref country code: LT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20230329 Ref country code: HR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20230329 |
|
| REG | Reference to a national code |
Ref country code: AT Ref legal event code: MK05 Ref document number: 1556094 Country of ref document: AT Kind code of ref document: T Effective date: 20230329 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20230329 Ref country code: GR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20230630 Ref country code: FI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20230329 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: NL Payment date: 20230822 Year of fee payment: 5 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SM Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20230329 Ref country code: RO Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20230329 Ref country code: PT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20230731 Ref country code: ES Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20230329 Ref country code: EE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20230329 Ref country code: AT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20230329 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20230329 Ref country code: PL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20230329 Ref country code: IS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20230729 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: FR Payment date: 20230822 Year of fee payment: 5 Ref country code: DE Payment date: 20230822 Year of fee payment: 5 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R097 Ref document number: 602019027031 Country of ref document: DE |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: DK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20230329 Ref country code: CZ Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20230329 |
|
| PLBE | No opposition filed within time limit |
Free format text: ORIGINAL CODE: 0009261 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: NO OPPOSITION FILED WITHIN TIME LIMIT |
|
| 26N | No opposition filed |
Effective date: 20240103 |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: PL |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20230329 |