EP3797836A1 - Fall-prevention device, preferably with automatic return - Google Patents
Fall-prevention device, preferably with automatic return Download PDFInfo
- Publication number
- EP3797836A1 EP3797836A1 EP20197085.2A EP20197085A EP3797836A1 EP 3797836 A1 EP3797836 A1 EP 3797836A1 EP 20197085 A EP20197085 A EP 20197085A EP 3797836 A1 EP3797836 A1 EP 3797836A1
- Authority
- EP
- European Patent Office
- Prior art keywords
- pawl
- reel
- housing
- fall arrest
- ratchet
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images











Classifications
-
- A—HUMAN NECESSITIES
- A62—LIFE-SAVING; FIRE-FIGHTING
- A62B—DEVICES, APPARATUS OR METHODS FOR LIFE-SAVING
- A62B1/00—Devices for lowering persons from buildings or the like
- A62B1/06—Devices for lowering persons from buildings or the like by making use of rope-lowering devices
- A62B1/08—Devices for lowering persons from buildings or the like by making use of rope-lowering devices with brake mechanisms for the winches or pulleys
-
- A—HUMAN NECESSITIES
- A62—LIFE-SAVING; FIRE-FIGHTING
- A62B—DEVICES, APPARATUS OR METHODS FOR LIFE-SAVING
- A62B35/00—Safety belts or body harnesses; Similar equipment for limiting displacement of the human body, especially in case of sudden changes of motion
- A62B35/0093—Fall arrest reel devices
Definitions
- This disclosure relates to the field of personal protective equipment, more particularly fall protection equipment, more precisely a fall prevention device, preferably with automatic return, allowing the user of the fall prevention device to be raised by an outside person.
- Self-retracting fall arrest devices are known in the state of the art comprising a casing, a reel around which a lanyard is intended to be wound, said reel being mounted so as to be rotatably mounted relative to the casing so as to be able to be driven in rotation in a winding direction and in an unwinding direction, and an automatic locking means configured to block the rotation of the reel in the unwinding direction in the event of a fall.
- Such devices are in particular designed to protect a user from a height, for example a user working on the roof of a building, a scaffolding, a building facade or even a confined space presenting a risk of falling from a height, against falling. user.
- the user wears personal protective equipment, such as a harness or a harness, to which one end of the lanyard is attached, for example using a carabiner.
- the automatic locking means blocks the rotation of the reel, which stops the unwinding of the lanyard and stops the user from falling.
- Some of these self-retracting fall arresters comprise a drive means comprising a drive shaft rotatably mounted relative to the housing so as to be able to be driven in rotation by the reel and to drive the reel in rotation, a ratchet. capable of being driven by the drive shaft, and a pawl, the pawl being configured to evolve between a first position in which the pawl does not interfere with the ratchet so that the drive of the ratchet by the drive shaft is free and a second position in which the pawl interferes with the ratchet so that the drive of the ratchet by the reel is prevented while the drive shaft can drive the reel at least in the winding direction.
- These devices are more particularly designed for the case where the user moves in a confined space and must both be protected against falling and be able to be reassembled by an outside person in the event of a fall, accident or any other situation in the environment. which it becomes necessary to reassemble the user.
- the confined space can be, for example, a manhole, a chimney or a technical shaft of a building.
- the external person acts on the device to move the pawl from the first position to the second position, then to drive the reel in the winding direction so as to raise the pawl. 'user.
- the outside person successively carries out these two operations using a crank supplied with the device and having an end piece complementary to a footprint carried by the drive shaft.
- the outside person should move the pawl from the second position to the first position, so that the device can revert to its self-retracting fall arrest operation.
- the external person must actuate the crank in a large gesture in the opposite direction to that used to raise the user, in order to move the pawl from the second position to the first position, then remove the tip from the crank imprint.
- the gesture to be performed to move the pawl to the first position is not intuitive for the outside person, so that the use of the device is not easy.
- the external person does not have an indication allowing him to know whether the pawl has returned to the first position, which is a source of confusion as to the condition. of operation of the automatic retractable fall arrest device and therefore potentially of risk to the user.
- This presentation aims to at least partially meet this need.
- the outside person can cause the pawl to pass between the first position and the second position using the control member, rather than the crank.
- the use of the device is therefore more intuitive for the outside person.
- the obstacle is a ratchet which can be driven by the drive shaft.
- the self-retracting fall arrest device includes a first self-retracting means configured to return the pawl to the second position.
- the pawl is pivotally mounted relative to the housing.
- control member comprises a control portion pivotally mounted relative to the housing.
- control member comprises a handling portion integral with the control portion and received in a flare that has an outer surface of the housing.
- the outside person can thus cause the pawl to pass between the first position and the second position by manipulating the handling portion, which is accessible from outside the housing. This further simplifies the use of the device for the outside person.
- the flaring can prevent, or at least limit, the risk of accidental manipulation of the manipulation portion.
- the device then offers particularly simple and intuitive operation for the outside person, since it suffices for the latter to manipulate the handling portion so that the pawl is brought to the second position and thus allows the outside person to reassemble the device. user.
- the flare has two stop walls, the handling portion abutting against one of the stop walls when the control portion is in the non-actuating position and against the other of the stop walls. when the control member is in the actuation position.
- the drive shaft has a footprint, the footprint being accessible from outside the housing when the control portion is in the actuation position.
- the drive shaft can be driven by a crank having a complementary end piece of the footprint or by a source of mechanical power comprising a shaft having a complementary end piece of the footprint.
- the present disclosure further relates to a fall arrest system comprising the fall arrest device described above and a crank having a tip complementary to the cavity, the housing preferably having at least one retaining element configured to hold the crank in place on the housing. .
- the present disclosure further relates to a fall arrest system comprising the fall arrest device described above and a mechanical power source comprising a shaft having a tip complementary to the footprint.
- the fall arrest device D shown in the figures is of the automatic return type. For the sake of brevity, it will hereinafter be referred to simply as "device D".
- the device D comprises a housing B.
- the housing B surrounds all the moving parts of the device D, which protects them against the external environment (dust, dirt, etc.) while protecting the user against contact with these. same parts of the device, and in particular contact with his fingers.
- the housing B mainly consists of two half-shells B1 and B2 fixed to one another so as to define an internal volume of the housing receiving the moving parts of the device D.
- the half-shell B2 furthermore carries a cover B3 which carries the control member C and masks the drive means described below.
- the half-shells B1 and B2 and the cover B3 can be produced by injection molding of a thermoplastic polymer, for example by injection molding of acrylonitrile butadiene styrene (ABS).
- ABS acrylonitrile butadiene styrene
- the half-shells B1 and B2 and the cover B3 are fixed to an internal bracket U described below, for example using screws 91.
- Box B can carry a handle 88 (visible on the figure 1 ), and / or at least one (two in the example shown) shackles 94, and / or a swivel 47.
- the handle 88 can allow the device D to be transported using only one hand.
- the shackle or shackles 94 can make it possible to fix the housing B to a frame A (described below).
- the swivel 47 can make it possible to fix the housing B to the frame A described below or to an anchoring point (not illustrated).
- the figures 5 and 6 show in perspective the device D, the housing B having been removed.
- the internal caliper U comprises a first plate U1 and a second plate U2 integral with one another so as to face each other.
- the plates U1 and U2 are joined together by two rods U8 at their end adjacent to the swivel 48, and by two other rods U9 at their end opposite to the swivel 48, the rods U8 and U9 being fixed to the plates U1 and U2, for example using nuts (not referenced but visible on the figures 5 and 6 ).
- the rods U8 have a cylindrical section, and are spaced so as to be able to receive between them one end of the swivel 47 so that the swivel is free to rotate while being held in position between the rods U8.
- An elastomeric seal U11 for example made of a synthetic rubber such as EPDM, can be provided on the first plate U1 to ensure a seal between the cover B3 and the plate U1 and thus protect the moving parts of the device. D against the external environment.
- the device D further comprises a reel 1.
- the reel 1 is rotatably mounted relative to the housing B, so as to be able to be driven in rotation in a winding direction E + and in an unwinding direction E-.
- the reel 1 can be carried, via bearings (not referenced), by a rotation shaft 29 itself carried by the plates U1 and U2.
- the reel 1 is of the drum type.
- a lanyard 64 can be wound around the reel 1.
- the term “lanyard” is understood to denote a strap, a cable, a chain or a cord, or more generally any flexible element and having sufficient mechanical strength to. join two elements.
- the lanyard 64 can for example wrap around a central portion 1B of the reel 1. Naturally, one end of the lanyard 64 is fixed to the reel 1, for example to its central portion 1B, while one end of the lanyard 64 is attached to the reel 1, for example to its central portion 1B. other end of the lanyard 64 is free.
- a rotation of the reel 1 in the winding direction E + tends to wrap the lanyard 64 around the reel 1 and therefore to distribute a shorter length of lanyard 64 outside the housing B
- a rotation of the reel 1 in the unwinding direction E - tends to unwind the lanyard 64 and therefore to distribute a greater length of lanyard 64 outside the housing B.
- the central portion 1B may have grooves 1BR complementary to the lanyard 64.
- the free end of the lanyard 64 can be provided, as shown in the figures 1 and 2 , a hook 70 allowing the attachment of this free end to personal protective equipment (not shown), such as a harness or a harness, of a user.
- the hook 70 can be connected to the free end of the lanyard 64 via a pivot 69 and two stitches 66, 73.
- a handle 74 can be provided between the free end of the lanyard 64 and the stitches 73, 66 to facilitate the handling of the lanyard 64 by the user.
- the device D comprises an automatic recall means.
- this automatic return means is in the form of a leaf spring 14 (visible in the sectional view of the figure 3A ) received in a groove 1A (visible on the figures 5 and 6 ) corresponding that presents the reel 1.
- This automatic return means is configured to recall the reel 1 in rotation in the winding direction E +. Due to this action of the automatic return means on the reel 1, the lanyard 64 is permanently maintained in tension when the user is attached to the free end of the lanyard 64 via his personal protective equipment. It is however specified that this automatic return means can be omitted from the device D, that is to say that the device D is not necessarily of the automatic return type.
- the device D also comprises an automatic blocking means configured to block the rotation of the reel 1 in the unwinding direction E - in the event of a fall.
- This automatic locking means consists of a pawl 40 pivotally mounted on the plate U1 via a pivot 34 and returned by an elastic element, in this case a torsion spring 39, and a ratchet 83. These elements are better visible on the figure 5 .
- the pawl 40 engages against one of the teeth of the ratchet 83, which blocks the rotation of the reel 1.
- Such an automatic locking means is known as such in the field of fall arrest devices and is therefore not described in more detail here.
- the device D further comprises a drive means.
- This drive means makes it possible to drive the reel 1 at least in the winding direction E +. It comprises a drive shaft 48 rotatably mounted relative to the housing B.
- the drive shaft 48 is carried by the plates U1 and U2, respectively via a ball bearing 53 and via a circlip 41 attached to one end 48A of the drive shaft 48, this end 48A having a shoulder for receive the circlip 41.
- the axis of the drive shaft 48 is preferably coplanar with the axis of the rotation shaft 29.
- the drive shaft 48 may carry a toothed wheel 55 meshing with the teeth. of a toothed part 1D which the reel 1 presents.
- the plane of the axis of the drive shaft 48 and of the axis of the rotation shaft 29 is preferably parallel with the plates U1 and U2, the plates U1 and U2 being themselves parallel, as shown in the figures.
- the drive shaft 48 can be arranged differently with respect to the rotation shaft 29, without departing from the scope of the present disclosure, as long as the drive shaft 48 can rotate the reel. 1 and be rotated by the reel 1.
- the drive shaft 48 can rotate the reel 1 and be rotated by the reel 1 in any other known way, for example via a drive with shaft and flange or with shaft and drive screw.
- the drive means is shown in more detail on the figures 3A , 3B and 4 , the figure 3A being a partial sectional view of the figure 2 according to III-III, the figure 3B being an enlargement of part of the partial sectional view of the figure 3A , and the figure 4 being a partially exploded view of device D without housing B.
- the drive means comprises a ratchet 57 which can be driven by the drive shaft 48, and a pawl 44.
- the drive shaft 48 has a portion of larger diameter 48H, this portion of larger diameter 48H having at least two shoulders, one of which keeps the cage of the pump in place.
- ball bearing 53 as shown in figure 3A .
- This portion of larger diameter also has a hollow portion carrying an internal thread 48F complementary to an external thread 50F carried by one end of an actuating portion 50.
- the actuating portion 50 has, at its end opposite to the end carrying the external thread 50F, an indentation 508.
- the indentation 508 is complementary to a tip 98 of a crank M which will be described in more detail later. .
- An end surface 48H1 of the larger diameter portion 48H is in contact with a friction plate 49 ', which itself is in contact with one face of the ratchet 57.
- the other face of the ratchet 57 is in contact. of another friction plate 49, which is itself in contact with a drive portion 52.
- the drive portion 52 is in the form of an annular plate, the central orifice of which is provided with two contact surfaces 52J1, 52J2 which are complementary to two corresponding surfaces 50J1, 50J2 carried by the actuating portion 50, as shown in figure 4 .
- One or more elastic elements are provided between the actuating portion 50 and the drive portion 52.
- these elastic elements are a plurality of (in this case, three) spring washers 51.
- the spring washers 51 are themselves held in place by a shoulder 50A presented by the actuating portion 50.
- the actuating portion 50 is itself held in place in an internal flare of the cover B3 by a washer 50 '.
- the ratchet 57 is mounted on the actuating portion 50 through a washer 56, so that as long as the pawl 44 is disengaged from the ratchet 57, the ratchet 57 can rotate the actuating portion 50 and 'drive shaft 48, and vice versa.
- the pawl 44 is configured to move between a first position in which it does not interfere with the ratchet 57, and a second position in which it interferes with the ratchet 57.
- the pawl 44 is pivotally mounted by with respect to the housing B. More precisely, the pawl 44 is mounted on a pivot 43 which is received in a through hole 42A of a fixing plate 42 attached to the plate U1. The pivot 43 is received in a through hole 441 provided by the pawl 44. A circlip 43 '(visible on the figure 4 ) is received in a groove 43G presented by the pivot in order to hold the pawl 44 in place on the pivot 43.
- the device D can further include a first automatic return means configured to return the pawl 44 to the second position.
- this first automatic return means is a torsion spring R1.
- One of the fixing ends R1A of the torsion spring R1 bears on an edge 42T of the fixing plate 42, while the other fixing end R1B of the torsion spring R1 bears on an edge of the pawl 44.
- the torsion spring R1 is held in place between the fixing plate 42 and the pawl 44 by a shoulder 43A carried by the pivot 43.
- the first automatic return means could be configured differently, and in particular be an elastic element other than a torsion spring, as long as it tends to return the pawl 44 to the second position.
- the device D further comprises a control member C mounted on the housing B.
- the control member C is intended to be manipulated by an outside person, in order to cause the pawl to pass between the first position and the second position.
- the control unit C thus presents, as can be seen on the figures 1 to 3A , a handling portion CM accessible from outside the housing B.
- the handling portion CM may have a slight flaring CP, typically of the dimensions and shape of a human thumb, of so that the outside person can move the CM manipulation portion with the thumb.
- control unit C is mounted on the cover B3.
- the handling portion CM is thus accessible from the exterior face of the cover B3.
- the handling portion CM is integral with a control portion C1.
- This control portion C1 acts on the pawl 44, for example by cooperating with a surface of the pawl 44, in order to cause the pawl 44 to pass from the first position to the second position and from the second position to the first position.
- control portion C1 is pivotally mounted relative to the housing. More precisely, as this is best seen on the figures 3 , 4 and 6 , the control portion C1 can itself take the form of a pivot received in an opening (not referenced) of the cache B3. As is best seen on the figure 4 , the control portion C1 has, at its end opposite to the handling portion CM, a tongue C12 received in a corresponding groove 442 presented by the pawl 44.
- the handling portion CM to pivot around the pivot materialized by the control portion C1
- the external person can bring the control portion C1 from a non-actuation position (shown in the figures 1 to 8 ) to an actuation position (described later with reference to the figure 9 ).
- the handling portion CM and the control portion C1 can be produced by injection molding of a thermoplastic polymer, for example by injection molding of acrylonitrile butadiene styrene (ABS). It is preferable that the handling portion CM and the control portion C1 are produced by injection molding of the same thermoplastic polymer as that used to produce the half-shells B1 and B2 and the cover B3.
- ABS acrylonitrile butadiene styrene
- the device D can further include a second automatic return means configured to return the control portion C1 to the non-actuation position.
- this second automatic return means is a torsion spring R2.
- one of the fixing ends R2A of the torsion spring R2 rests on an internal flare B3R that the cover B3 has, while the other fixing end R2B of the torsion spring R2 is received in a groove C1B that has the control portion C1.
- the second automatic return means could be configured differently, and in particular be an elastic element other than a torsion spring, as long as it tends to return the control portion C1 to the non-actuation position.
- control portion C1 can be brought from a non-actuating position to an actuating position.
- the figure 8 represents the case where the control portion C1 is in the non-actuation position.
- the control portion C1 is returned to this position by the second automatic return means, that is to say, in the example shown, by the torsion spring R2.
- the pawl 44 is returned to the second position by the first automatic return means, that is to say, in the example shown, by the torsion spring R1; but these first and second automatic return means are configured so that, when the control portion C1 is in the non-actuating position, the second automatic return means impose the position of the control portion C1 on the pawl 44, c ' that is, the pawl 44 is maintained in the first position despite the action of the first automatic return means.
- the stiffness constant of the torsion spring R2 is greater. than the stiffness constant of the torsion spring R1.
- the stiffness constant of the torsion spring R2 can be at least 2 times greater, and preferably between 2 times and 3 times greater than the stiffness constant of the torsion spring R1
- the cavity 508 is masked by the manipulation portion CM when the control portion C1 is in the non-actuating position. In fact, in this case, it is impossible for the external person to incorrectly use the device D by inserting the tip 98 of the crank M into the recess 508 while the pawl 44 is in its first position in which it is not. 'not interfere with ratchet 57.
- the groove 442 of the pawl 42 covers an angular sector larger than the tongue C12 of the control portion C1, in order to create a clearance between the groove 442 and the tongue C12 which allows the pawl 44 to reach its second position when the control portion C1 is brought to the actuation position.
- the end 50B of the actuating portion 50 which carries the external thread 50F receives a 50W deformable washer.
- the deformable washer 50W is provided between the end 50B and the end face of the flare of the drive shaft 48 on which the internal thread 48F is provided. This end face has a blind hole 48J.
- the friction plates 49, 49 ' are kept in contact with the corresponding face of the ratchet 57.
- the friction of the friction plates 49, 49' against the two faces of the ratchet 57 contributes to block the rotation of the ratchet 57, together with the interference of the pawl 44 with the ratchet 57. The reel 1 is thus prevented from driving the ratchet 57.
- any rotation of the crank M after the maximum deformation has been reached drives the actuation portion 50, which in turn drives the drive portion 52 (due to the cooperation between the surfaces 50J1, 50J2 and 52J1, 52J2), the drive shaft 48, and therefore the toothed wheel 55 and finally the reel 1.
- the device D which has just been described offers particularly simple and intuitive operation for the outside person, since it suffices for the latter to manipulate the handling portion CM so that the pawl 44 is brought to the second position and thus allows to the external person to raise the user using the crank M, then to let the control portion C1 be returned to the non-actuating position so that the pawl 44 is again brought to the first position and allows device D to operate as an automatic fall arrester again.
- the ratchet 57 may have an arbitrary number of teeth allowing the pawl 44 to interfere with the ratchet 57.
- the ratchet 57 can be replaced by any element which can be driven by the drive shaft 48, as long as this element materializes an obstacle with which the pawl 44 interferes in the second position and does not interfere in the first position .
- the handling portion CM is received in a flare R that has an outer surface of the housing B.
- the flare R is located on an outer surface of the cover B3.
- the CM manipulation portion can then, as shown in the figure figure 3A , be flush with the outer surface of the cover B3, except possibly at the level of the flaring CP of the handling portion CM. This can prevent, or at least limit, the risk of accidental manipulation of the CM manipulation portion.
- the flare R preferably has two stop portions P1, P2 serving to limit the movement of the handling portion CM in the flare R.
- the handling portion CM abuts against the stop wall P1 when the control portion C1 is in the non-actuating position (position shown in the figure. figure 8 ) and against the stop wall P2 when the control portion C2 is in the actuation position (position shown on the figure 9 ).
- the operation of device D is then considerably more intuitive for the outside person, since it suffices for the latter to bring the handling portion CM against the stop wall P2 when he wishes to use the crank M to raise the user, then to let the second automatic return means bring the handling portion CM back against the stop wall P1.
- the flare R, the handling portion CM and the tip 98 of the crank M are configured such that when the tip 98 is received in the recess 508, the tip 98 maintains the handling portion CM in abutment against the abutment wall P2.
- the operation of the device D is then even more intuitive for the outside person, since it is the very fact of bringing the handling portion CM against the stop wall P2 to introduce the end piece 98 of the crank M which brings the pawl 44 to the second position, then it is the very fact of removing the end piece 98 from the crank M which again brings the handling portion CM into abutment against the stop wall P1 and the pawl 44 in the first position.
- the crank M can in principle have any suitable geometry, as long as it has a tip 98 complementary to the tip 508 and thus allows the outside person to drive the drive shaft 48 in rotation by turning the crank M.
- the M crank has the configuration shown in the figures 1 and 2 .
- the end piece 98 is carried by a first portion 97, which is planar and is integral with a second portion 100, which is also planar and forms an obtuse angle with the first portion 97.
- the first portion planar 97 and the second planar portion 100 can for example be produced by casting or by machining a metal alloy, for example galvanized steel.
- the second planar portion 100 has at one of its ends a rivet 101, with the aid of which a handle 99 is fixed to the second planar portion 100. By manipulating the handle 99, the user can turn the crank M so rotating the drive shaft 48.
- the housing B preferably carries at least one holding element configured to hold the crank M in place on the housing B.
- the half-shell B1 which carries several holding elements, which are in the form of pairs of elastic clips 96, made of a thermoplastic, for example polycarbonate (PC). It is however specified that other types of retaining elements are possible and that all or some of these retaining elements could be placed on the housing B elsewhere than on the half-shell B1.
- the obtuse angle formed by the first planar portion 97 and the second planar portion 100 can be chosen so as to be substantially equal to an angle formed by an outer surface of the housing B, so that the first planar portion 97 and the second planar portion 100 substantially follow the outer curvature of the housing. This makes it possible to transport the crank M together with the device B in a compact manner.
- This fall protection device comprises the fall protection system comprising the device D and the crank M, the lanyard 64 described above and wound around the reel 1 of the device, and a frame A.
- the armature A is a tripod intended to be placed above a pipe manhole E.
- the device D is fixed to the frame A, for example using a carabiner.
- the lanyard 64 is unwound partially outside the device D and passes through a top A1 of the frame A, so that the user can go down and up in the manhole E while being held by the lanyard 64, after having hooked his personal protective equipment on the hook 70.
- the frame A can be of any type known in the field of fall protection, as long as it offers an anchoring point for the device D which is sufficiently robust to protect the user of the device D against falling. and to allow an outside person to reassemble the user.
- fall protection device described can be used to protect the user in any confined space other than a manhole, for example a chimney or a service duct of a building.
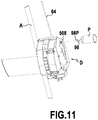
- the fall protection device comprises a source of mechanical power P that can be used in place of the crank M.
- the source of mechanical power P thus comprises a shaft 98 'having a tip 98P complementary to the cavity 508.
- the mechanical power source P can be of any suitable type; it may in particular be an electric motor, possibly powered by a battery.
- device D in this variant is identical to that described in relation to the figures 1 to 10 , except that instead of inserting the tip 98 of the crank M in the recess 508, the external person can introduce the tip 98P into the recess 508. Then, the external person can operate the source. mechanical power P to reassemble the user. The user's ascent does not therefore call on the physical force of the external person, which makes the use of the fall protection device more convenient.
Landscapes
- Health & Medical Sciences (AREA)
- General Health & Medical Sciences (AREA)
- Business, Economics & Management (AREA)
- Emergency Management (AREA)
- Emergency Lowering Means (AREA)
Abstract
Dispositif antichute (D), de préférence à rappel automatique, du type comprenant un moyen d'entraînement comprenant un arbre d'entraînement (48, 50) monté de façon rotative par rapport au boîtier (B) de façon à pouvoir être entraîné en rotation par l'enrouleur (1) et entraîner en rotation l'enrouleur (1), un obstacle (57) pouvant être entraîné par l'arbre d'entraînement (48, 50), et un cliquet (44).Un organe de commande (C) monté sur le boîtier (B) est configuré pour provoquer le passage du cliquet (44) entre une première position dans laquelle le cliquet (44) n'interfère pas avec l'obstacle (57) et une deuxième position dans laquelle le cliquet (44) interfère avec l'obstacle (57) de sorte que l'entraînement de l'obstacle (57) par l'enrouleur (1) est empêché tandis que l'arbre d'entraînement (48, 50) peut entraîner l'enrouleur (1) au moins dans le sens d'enroulement (E+).Fall arrest device (D), preferably with automatic return, of the type comprising drive means comprising a drive shaft (48, 50) rotatably mounted relative to the housing (B) so as to be able to be driven in rotation by the reel (1) and drive the reel (1) in rotation, an obstacle (57) which can be driven by the drive shaft (48, 50), and a pawl (44).A control member (C) mounted on the housing (B) is configured to cause the passage of the pawl (44) between a first position in which the pawl (44) does not interfere with the obstacle (57) and a second position in which the pawl (44) interferes with the obstacle (57) so that the driving of the obstacle (57) by the reel (1) is prevented while the drive shaft (48, 50) can drive the winder (1) at least in the winding direction (E+).
Description
Le présent exposé concerne le domaine des équipements de protection individuelle, plus particulièrement les équipements de protection contre la chute, plus précisément un dispositif antichute, de préférence à rappel automatique, permettant la remontée de l'utilisateur du dispositif antichute par une personne extérieure.This disclosure relates to the field of personal protective equipment, more particularly fall protection equipment, more precisely a fall prevention device, preferably with automatic return, allowing the user of the fall prevention device to be raised by an outside person.
On connaît dans l'état de la technique des dispositifs antichute à rappel automatique comprenant un boîtier, un enrouleur autour duquel est destiné à s'enrouler une longe, ledit enrouleur étant monté de façon rotative par rapport au boîtier de façon à pouvoir être entraîné en rotation dans un sens d'enroulement et dans un sens de déroulement, et un moyen de blocage automatique configuré pour bloquer la rotation de l'enrouleur dans le sens de déroulement en cas de chute.Self-retracting fall arrest devices are known in the state of the art comprising a casing, a reel around which a lanyard is intended to be wound, said reel being mounted so as to be rotatably mounted relative to the casing so as to be able to be driven in rotation in a winding direction and in an unwinding direction, and an automatic locking means configured to block the rotation of the reel in the unwinding direction in the event of a fall.
De tels dispositifs sont notamment conçus pour protéger contre la chute un utilisateur évoluant en hauteur, par exemple un utilisateur intervenant sur la toiture d'un bâtiment, un échafaudage, une façade de bâtiment ou encore un espace confiné présentant un risque de chute de l'utilisateur. L'utilisateur porte un équipement de protection individuelle, tel qu'un harnais ou un baudrier, auquel une extrémité de la longe est fixée, par exemple à l'aide d'un mousqueton. En cas de chute de l'utilisateur, le moyen de blocage automatique bloque la rotation de l'enrouleur, ce qui stoppe le déroulement de la longe et arrête la chute de l'utilisateur.Such devices are in particular designed to protect a user from a height, for example a user working on the roof of a building, a scaffolding, a building facade or even a confined space presenting a risk of falling from a height, against falling. user. The user wears personal protective equipment, such as a harness or a harness, to which one end of the lanyard is attached, for example using a carabiner. In the event of the user falling, the automatic locking means blocks the rotation of the reel, which stops the unwinding of the lanyard and stops the user from falling.
Certains de ces dispositifs antichute à rappel automatique comprennent un moyen d'entraînement comprenant un arbre d'entraînement monté de façon rotative par rapport au boîtier de façon à pouvoir être entraîné en rotation par l'enrouleur et entraîner en rotation l'enrouleur, un rochet pouvant être entraîné par l'arbre d'entraînement, et un cliquet, le cliquet étant configuré pour évoluer entre une première position dans laquelle le cliquet n'interfère pas avec le rochet de sorte que l'entraînement du rochet par l'arbre d'entraînement est libre et une deuxième position dans laquelle le cliquet interfère avec le rochet de sorte que l'entraînement du rochet par l'enrouleur est empêché tandis que l'arbre d'entraînement peut entraîner l'enrouleur au moins dans le sens d'enroulement.Some of these self-retracting fall arresters comprise a drive means comprising a drive shaft rotatably mounted relative to the housing so as to be able to be driven in rotation by the reel and to drive the reel in rotation, a ratchet. capable of being driven by the drive shaft, and a pawl, the pawl being configured to evolve between a first position in which the pawl does not interfere with the ratchet so that the drive of the ratchet by the drive shaft is free and a second position in which the pawl interferes with the ratchet so that the drive of the ratchet by the reel is prevented while the drive shaft can drive the reel at least in the winding direction.
Ces dispositifs sont plus particulièrement conçus pour le cas où l'utilisateur évolue dans un espace confiné et doit à la fois être protégé contre la chute et pouvoir être remonté par une personne extérieure en cas de chute, d'accident ou de toute autre situation dans laquelle il devient nécessaire de remonter l'utilisateur. L'espace confiné peut être, par exemple, un regard de canalisation, une cheminée ou une gaine technique d'un bâtiment. Lorsqu'il devient nécessaire de remonter l'utilisateur, la personne extérieure agit sur le dispositif pour faire passer le cliquet de la première position à la deuxième position, puis pour entraîner l'enrouleur dans le sens d'enroulement de façon à faire remonter l'utilisateur. La personne extérieure réalise successivement ces deux opérations à l'aide d'une manivelle fournie avec le dispositif et présentant un embout complémentaire d'une empreinte que porte l'arbre d'entraînement.These devices are more particularly designed for the case where the user moves in a confined space and must both be protected against falling and be able to be reassembled by an outside person in the event of a fall, accident or any other situation in the environment. which it becomes necessary to reassemble the user. The confined space can be, for example, a manhole, a chimney or a technical shaft of a building. When it becomes necessary to reassemble the user, the external person acts on the device to move the pawl from the first position to the second position, then to drive the reel in the winding direction so as to raise the pawl. 'user. The outside person successively carries out these two operations using a crank supplied with the device and having an end piece complementary to a footprint carried by the drive shaft.
Ces dispositifs donnent globalement satisfaction du point de vue de la sécurité, car ils permettent de protéger l'utilisateur contre la chute et de remonter l'utilisateur en cas de nécessité, sans faire descendre un secouriste dans l'espace confiné.These devices are generally satisfactory from the point of view of safety, because they make it possible to protect the user against falling and to raise the user if necessary, without having a rescuer descend into the confined space.
Toutefois, ils présentent des inconvénients du point de vue de la facilité d'utilisation. Une fois que l'utilisateur a été remonté, la personne extérieure doit faire passer le cliquet de la deuxième position à la première position, afin que le dispositif puisse repasser à son fonctionnement antichute à rappel automatique. Pour ce faire, la personne extérieure doit actionner la manivelle dans un grand geste dans le sens inverse de celui utilisé pour remonter l'utilisateur, afin de faire passer le cliquet de la deuxième position à la première position, puis retirer l'embout de la manivelle de l'empreinte. Le geste à réaliser pour faire passer le cliquet à la première position n'est pas intuitif pour la personne extérieure, de sorte que l'utilisation du dispositif n'est pas aisée. En outre, la personne extérieure ne dispose pas d'indication lui permettant de savoir si le cliquet est bien repassé à la première position, ce qui est source de confusion quant à l'état de fonctionnement du dispositif antichute à rappel automatique et donc potentiellement de risque pour l'utilisateur.However, they have drawbacks from the point of view of ease of use. Once the user has been reassembled, the outside person should move the pawl from the second position to the first position, so that the device can revert to its self-retracting fall arrest operation. To do this, the external person must actuate the crank in a large gesture in the opposite direction to that used to raise the user, in order to move the pawl from the second position to the first position, then remove the tip from the crank imprint. The gesture to be performed to move the pawl to the first position is not intuitive for the outside person, so that the use of the device is not easy. In addition, the external person does not have an indication allowing him to know whether the pawl has returned to the first position, which is a source of confusion as to the condition. of operation of the automatic retractable fall arrest device and therefore potentially of risk to the user.
Il existe donc un réel besoin d'un dispositif antichute à rappel automatique du type précité qui ne présente pas ces inconvénients.There is therefore a real need for an automatic return fall arrest device of the aforementioned type which does not have these drawbacks.
Le présent exposé vise à répondre au moins partiellement à ce besoin.This presentation aims to at least partially meet this need.
Le présent exposé concerne un dispositif antichute à rappel automatique, comprenant :
- un boîtier ;
- un enrouleur autour duquel est destiné à s'enrouler une longe, ledit enrouleur étant monté de façon rotative par rapport au boîtier de façon à pouvoir être entraîné en rotation dans un sens d'enroulement et dans un sens de déroulement ;
- un moyen de blocage automatique configuré pour bloquer la rotation de l'enrouleur dans le sens de déroulement en cas de chute ; et
- un moyen d'entraînement comprenant un arbre d'entraînement monté de façon rotative par rapport au boîtier de façon à pouvoir être entraîné en rotation par l'enrouleur et entraîner en rotation l'enrouleur, un obstacle pouvant être entraîné par l'arbre d'entraînement, et un cliquet, le cliquet étant configuré pour évoluer entre une première position dans laquelle le cliquet n'interfère pas avec l'obstacle de sorte que l'entraînement de l'obstacle par l'arbre d'entraînement est libre et une deuxième position dans laquelle le cliquet interfère avec l'obstacle de sorte que l'entraînement de l'obstacle par l'enrouleur est empêché tandis que l'arbre d'entraînement peut entraîner l'enrouleur au moins dans le sens d'enroulement, le dispositif comprenant en outre un organe de commande monté sur le boîtier et configuré pour provoquer le passage du cliquet entre la première position et la deuxième position.
- a housing ;
- a reel around which a lanyard is intended to be wound, said reel being rotatably mounted relative to the housing so as to be able to be driven in rotation in a winding direction and in an unwinding direction;
- automatic blocking means configured to block the rotation of the reel in the unwinding direction in the event of a fall; and
- a drive means comprising a drive shaft rotatably mounted relative to the housing so as to be able to be driven in rotation by the reel and to drive the reel in rotation, an obstacle being able to be driven by the shaft of drive, and a pawl, the pawl being configured to move between a first position in which the pawl does not interfere with the obstacle so that the drive of the obstacle by the drive shaft is free and a second position in which the pawl interferes with the obstacle so that the driving of the obstacle by the reel is prevented while the drive shaft can drive the reel at least in the winding direction, the device further comprising a control member mounted on the housing and configured to cause the passage of the pawl between the first position and the second position.
Grâce à ces dispositions, la personne extérieure peut provoquer le passage du cliquet entre la première position et la deuxième position à l'aide de l'organe de commande, plutôt que de la manivelle. L'utilisation du dispositif est donc plus intuitive pour la personne extérieure.Thanks to these arrangements, the outside person can cause the pawl to pass between the first position and the second position using the control member, rather than the crank. The use of the device is therefore more intuitive for the outside person.
Dans certains modes de réalisation, l'obstacle est un rochet pouvant être entraîné par l'arbre d'entraînement.In some embodiments, the obstacle is a ratchet which can be driven by the drive shaft.
Dans certains modes de réalisation, le dispositif antichute à rappel automatique comprend un premier moyen de rappel automatique configuré pour rappeler le cliquet vers la deuxième position.In some embodiments, the self-retracting fall arrest device includes a first self-retracting means configured to return the pawl to the second position.
Dans certains modes de réalisation, le cliquet est monté à pivot par rapport au boîtier.In some embodiments, the pawl is pivotally mounted relative to the housing.
Dans certains modes de réalisation, l'organe de commande comprend une portion de commande montée à pivot par rapport au boîtier.In some embodiments, the control member comprises a control portion pivotally mounted relative to the housing.
Dans certains modes de réalisation, l'organe de commande comprend une portion de manipulation solidaire de la portion de commande et reçue dans un évasement que présente une surface extérieure du boîtier.In some embodiments, the control member comprises a handling portion integral with the control portion and received in a flare that has an outer surface of the housing.
La personne extérieure peut ainsi provoquer le passage du cliquet entre la première position et la deuxième position en manipulant la portion de manipulation, qui est accessible depuis l'extérieur du boîtier. Ceci simplifie encore l'utilisation du dispositif pour la personne extérieure. De plus, l'évasement peut empêcher, ou au moins limiter, le risque de manipulation accidentelle de la portion de manipulation.The outside person can thus cause the pawl to pass between the first position and the second position by manipulating the handling portion, which is accessible from outside the housing. This further simplifies the use of the device for the outside person. In addition, the flaring can prevent, or at least limit, the risk of accidental manipulation of the manipulation portion.
Dans certains modes de réalisation,
- la portion de commande est montée à pivot par rapport au boîtier de façon à pouvoir évoluer entre une position de non-actionnement et une position d'actionnement ;
- le dispositif comprend un deuxième moyen de rappel automatique configuré pour rappeler la portion de commande vers la position de non-actionnement ; et
- les premier et deuxième moyens de rappel automatique sont configurés pour que, lorsque la portion de commande est amenée à la position d'actionnement, le premier moyen de rappel automatique amène le cliquet à la deuxième position.
- the control portion is pivotally mounted relative to the housing so as to be able to move between a non-actuation position and an actuation position;
- the device comprises a second automatic return means configured to return the control portion to the non-actuation position; and
- the first and second automatic return means are configured so that, when the control portion is brought to the actuating position, the first automatic return means bring the pawl to the second position.
Le dispositif offre alors un fonctionnement particulièrement simple et intuitif pour la personne extérieure, puisqu'il suffit à celle-ci de manipuler la portion de manipulation pour que le cliquet soit amené à la deuxième position et permette ainsi à la personne extérieure de remonter l'utilisateur.The device then offers particularly simple and intuitive operation for the outside person, since it suffices for the latter to manipulate the handling portion so that the pawl is brought to the second position and thus allows the outside person to reassemble the device. user.
Dans certains modes de réalisation, l'évasement présente deux parois de butée, la portion de manipulation abutant contre l'une des parois de butée lorsque la portion de commande est dans la position de non-actionnement et contre l'autre des parois de butée lorsque l'organe de commande est dans la position d'actionnement.In some embodiments, the flare has two stop walls, the handling portion abutting against one of the stop walls when the control portion is in the non-actuating position and against the other of the stop walls. when the control member is in the actuation position.
Le fonctionnement du dispositif est alors plus intuitif encore pour la personne extérieure, puisque c'est le fait même d'amener la portion de manipulation contre la paroi de butée qui amène le cliquet à la deuxième position.The operation of the device is then even more intuitive for the outside person, since it is the very fact of bringing the handling portion against the stop wall which brings the pawl to the second position.
Dans certains modes de réalisation, l'arbre d'entraînement présente une empreinte, l'empreinte étant accessible depuis l'extérieur du boîtier lorsque la portion de commande est dans la position d'actionnement.In some embodiments, the drive shaft has a footprint, the footprint being accessible from outside the housing when the control portion is in the actuation position.
Ainsi, lorsque la portion de commande est dans la position d'actionnement, l'arbre d'entraînement peut être entraîné par une manivelle présentant un embout complémentaire de l'empreinte ou par une source de puissance mécanique comprenant un arbre présentant un embout complémentaire de l'empreinte.Thus, when the control portion is in the actuating position, the drive shaft can be driven by a crank having a complementary end piece of the footprint or by a source of mechanical power comprising a shaft having a complementary end piece of the footprint.
Le présent exposé concerne en outre un système antichute comprenant le dispositif antichute décrit ci-dessus et une manivelle présentant un embout complémentaire de l'empreinte, le boîtier présentant de préférence au moins un élément de maintien configuré pour maintenir la manivelle en place sur le boîtier.The present disclosure further relates to a fall arrest system comprising the fall arrest device described above and a crank having a tip complementary to the cavity, the housing preferably having at least one retaining element configured to hold the crank in place on the housing. .
Le présent exposé concerne en outre un système antichute comprenant le dispositif antichute décrit ci-dessus et une source de puissance mécanique comprenant un arbre présentant un embout complémentaire de l'empreinte.The present disclosure further relates to a fall arrest system comprising the fall arrest device described above and a mechanical power source comprising a shaft having a tip complementary to the footprint.
Le présent exposé concerne en outre un dispositif de protection antichute comprenant :
- l'un des systèmes antichute décrits ci-dessus ;
- une longe, la longe étant apte à être enroulée autour de l'enrouleur et pouvant être fixée à une extrémité à un équipement de protection individuelle d'un utilisateur ; et
- une armature à laquelle le boîtier peut être fixé.
- one of the fall arrest systems described above;
- a lanyard, the lanyard being adapted to be wound around the reel and being able to be attached at one end to a user's personal protective equipment; and
- a frame to which the housing can be attached.
-
[
Fig. 1 ] Lafigure 1 est une vue en perspective d'un dispositif antichute à rappel automatique conforme au présent exposé.[Fig. 1 ] Thefigure 1 is a perspective view of a fall arrest device with automatic return according to the present disclosure. -
[
Fig. 2 ] Lafigure 2 est une vue de face du dispositif antichute à rappel automatique de lafigure 1 .[Fig. 2 ] Thefigure 2 is a front view of the self-retracting fall arrest systemfigure 1 . -
[
Fig. 3A ] Lafigure 3A est une vue en coupe partielle de lafigure 2 selon III-III.[Fig. 3A ] Thefigure 3A is a partial sectional view of thefigure 2 according to III-III. -
[
Fig. 3B-3C ] Lafigure 3B est un agrandissement d'une partie de la vue en coupe partielle de lafigure 3A , et lafigure 3C est une vue analogue à lafigure 3B , montrant le fonctionnement du dispositif antichute lorsqu'une personne extérieure utilise le dispositif antichute pour remonter l'utilisateur du dispositif antichute.[Fig. 3B-3C ] Thefigure 3B is an enlargement of part of the partial sectional view of thefigure 3A , and thefigure 3C is a view similar to thefigure 3B , showing the operation of the fall arrest system when an outside person uses the fall arrest system to raise the user of the fall arrest system. -
[
Fig. 4 ] Lafigure 4 est une vue partiellement éclatée du dispositif antichute à rappel automatique desfigures 1 à 3C , sans son boîtier.[Fig. 4 ] Thefigure 4 is a partially exploded view of the fall arrest device with automatic return offigures 1 to 3C , without its case. -
[
Fig. 5 ] Lafigure 5 est une vue en perspective du dispositif antichute à rappel automatique desfigures 1 à 3C , sans son boîtier.[Fig. 5 ] Thefigure 5 is a perspective view of the fall arrest device with automatic return offigures 1 to 3C , without its housing. -
[
Fig. 6 ] Lafigure 6 est une autre vue en perspective du dispositif antichute à rappel automatique desfigures 1 à 3C , sans son boîtier.[Fig. 6 ] Thefigure 6 is another perspective view of the fall arrest device with automatic return offigures 1 to 3C , without its housing. -
[
Fig. 7 ] Lafigure 7 est une vue partielle et partiellement arrachée du dispositif antichute à rappel automatique desfigures 1 à 3C .[Fig. 7 ] Thefigure 7 is a partial and partially broken away view of the fall arrest device with automatic return offigures 1 to 3C . -
[
Fig. 8 ] Lafigure 8 est une vue schématique illustrant la position de certaines pièces du dispositif antichute à rappel automatique desfigures 1 à 3C , lorsque la portion de commande de l'organe de commande est dans sa position de non-actionnement.[Fig. 8 ] Thefigure 8 is a schematic view illustrating the position of certain parts of the fall arrest device with automatic return offigures 1 to 3C , when the control portion of the control member is in its non-actuating position. -
[
Fig. 9 ] Lafigure 9 est une vue analogue à celle de lafigure 8 , à ceci près que la portion de commande de l'organe de commande est dans sa position d'actionnement.[Fig. 9 ] Thefigure 9 is a view similar to that of thefigure 8 , except that the control portion of the control member is in its actuation position. -
[
Fig. 10 ] Lafigure 10 est une vue en perspective d'un système antichute et d'un dispositif de protection antichute sur lesquels le dispositif antichute à rappel automatique desfigures 1 à 3C peut être installé.[Fig. 10 ] Thefigure 10 is a perspective view of a fall arrest system and a fall protection device on which the fall arrest device with automatic return offigures 1 to 3C can be installed. -
[
Fig. 11 ] Lafigure 11 est une vue en perspective d'une variante du système antichute et du dispositif de protection antichute de lafigure 10 .[Fig. 11 ] Thefigure 11 is a perspective view of a variant of the fall arrest system and the fall protection device of thefigure 10 .
On a représenté sur les
Le dispositif antichute D représenté sur les figures est du type à rappel automatique. Par souci de concision, on le désignera par la suite simplement par « le dispositif D ».The fall arrest device D shown in the figures is of the automatic return type. For the sake of brevity, it will hereinafter be referred to simply as "device D".
Le dispositif D comprend un boîtier B. Le boîtier B entoure l'ensemble des pièces mobiles du dispositif D, ce qui les protège contre l'environnement extérieur (poussière, salissures, etc.) tout en protégeant l'utilisateur contre le contact avec ces mêmes pièces du dispositif, et en particulier du contact avec ses doigts.The device D comprises a housing B. The housing B surrounds all the moving parts of the device D, which protects them against the external environment (dust, dirt, etc.) while protecting the user against contact with these. same parts of the device, and in particular contact with his fingers.
Dans l'exemple représenté, le boîtier B se compose principalement de deux demi-coques B1 et B2 fixées l'une à l'autre de façon à délimiter un volume intérieur de boîtier recevant les pièces mobiles du dispositif D. La demi-coque B2 porte en outre un cache B3 qui porte l'organe de commande C et masque le moyen d'entraînement décrits plus loin.In the example shown, the housing B mainly consists of two half-shells B1 and B2 fixed to one another so as to define an internal volume of the housing receiving the moving parts of the device D. The half-shell B2 furthermore carries a cover B3 which carries the control member C and masks the drive means described below.
Les demi-coques B1 et B2 et le cache B3 peuvent être réalisés par moulage par injection d'un polymère thermoplastique, par exemple par moulage par injection d'acrylonitrile butadiène styrène (ABS). Les demi-coques B1 et B2 et le cache B3 sont fixés à un étrier interne U décrit plus loin, par exemple à l'aide de vis 91.The half-shells B1 and B2 and the cover B3 can be produced by injection molding of a thermoplastic polymer, for example by injection molding of acrylonitrile butadiene styrene (ABS). The half-shells B1 and B2 and the cover B3 are fixed to an internal bracket U described below, for example using screws 91.
Le boîtier B peut porter une poignée 88 (visible sur la
Les
Comme on peut le voir sur ces figures, l'étrier interne U comprend une première plaque U1 et une deuxième plaque U2 solidaires l'une de l'autre de façon à se faire face. Dans l'exemple représenté, les plaques U1 et U2 sont solidarisées entre elles par deux tiges U8 au niveau de leur extrémité voisine de l'émerillon 48, et par deux autres tiges U9 au niveau de leur extrémité opposée à l'émerillon 48, les tiges U8 et U9 étant fixées aux plaques U1 et U2, par exemple à l'aide d'écrous (non référencés mais visibles sur les
Le dispositif D comprend en outre un enrouleur 1. L'enrouleur 1 est monté de façon rotative par rapport au boîtier B, de façon à pouvoir être entraîné en rotation dans un sens d'enroulement E+ et dans un sens de déroulement E-. Pour cela, l'enrouleur 1 peut être porté, via des paliers (non référencés), par un arbre de rotation 29 lui-même porté par les plaques U1 et U2. Dans l'exemple représenté, l'enrouleur 1 est du type à tambour.The device D further comprises a
Une longe 64 peut s'enrouler autour de l'enrouleur 1. Par « longe », on entend désigner une sangle, un câble, une chaîne ou une corde, ou plus généralement n'importe quel élément souple et présentant une résistance mécanique suffisante pour joindre deux éléments. La longe 64 peut par exemple s'enrouler autour d'une portion centrale 1B de l'enrouleur 1. Naturellement, une extrémité de la longe 64 est fixée à l'enrouleur 1, par exemple à sa portion centrale 1B, tandis qu'une autre extrémité de la longe 64 est libre. Ainsi, une rotation de l'enrouleur 1 dans le sens d'enroulement E+ tend à enrouler la longe 64 autour de l'enrouleur 1 et donc à distribuer une plus faible longueur de longe 64 en dehors du boîtier B, tandis qu'une rotation de l'enrouleur 1 dans le sens de déroulement E- tend à dérouler la longe 64 et donc à distribuer une plus grande longueur de longe 64 en dehors du boîtier B. Pour permettre une meilleure disposition de la longe 64 autour de la portion centrale 1B, la portion centrale 1B peut présenter des rainures 1BR complémentaires de la longe 64.A
L'extrémité libre de la longe 64 peut être pourvue, comme représenté sur les
Le dispositif D comprend un moyen de rappel automatique. Dans l'exemple représenté, ce moyen de rappel automatique se présente sous la forme d'un ressort à lames 14 (visible sur la vue en coupe de la
Le dispositif D comprend aussi un moyen de blocage automatique configuré pour bloquer la rotation de l'enrouleur 1 dans le sens de déroulement E- en cas de chute. Ce moyen de blocage automatique se compose d'un cliquet 40 monté à pivot sur la plaque U1 via un pivot 34 et rappelé par un élément élastique, en l'espèce un ressort de torsion 39, et d'un rochet 83. Ces éléments sont mieux visibles sur la
Le dispositif D comprend en outre un moyen d'entraînement. Ce moyen d'entraînement permet d'entraîner l'enrouleur 1 au moins dans le sens d'enroulement E+. Il comprend un arbre d'entraînement 48 monté de façon rotative par rapport au boîtier B. En l'espèce, comme représenté sur les
L'axe de l'arbre d'entraînement 48 est de préférence coplanaire avec l'axe de l'arbre de rotation 29. Dans ce cas, l'arbre d'entraînement 48 peut porter une roue dentée 55 s'engrenant avec les dents d'une partie dentée 1D que présente l'enrouleur 1. Le plan de l'axe de l'arbre d'entraînement 48 et de l'axe de l'arbre de rotation 29 est de préférence parallèle avec les plaques U1 et U2, les plaques U1 et U2 étant elles-mêmes parallèles, comme représenté sur les figures. Il est toutefois entendu que l'arbre d'entraînement 48 peut être agencé différemment par rapport à l'arbre de rotation 29, sans sortir du cadre du présent exposé, tant que l'arbre d'entraînement 48 peut entraîner en rotation l'enrouleur 1 et être entraîné en rotation par l'enrouleur 1. Notamment, l'arbre d'entraînement 48 peut entraîner en rotation l'enrouleur 1 et être entraîné en rotation par l'enrouleur 1 de toute autre façon connue, par exemple via un entraînement à axe et flasque ou à axe et vis d'entraînement.The axis of the
Le moyen d'entraînement est représenté plus en détail sur les
Comme représenté sur ces figures, le moyen d'entraînement comprend un rochet 57 pouvant être entraîné par l'arbre d'entraînement 48, et un cliquet 44.As shown in these figures, the drive means comprises a
À son extrémité opposée à l'extrémité 48A, l'arbre d'entraînement 48 présente une partie de plus grand diamètre 48H, cette partie de plus grand diamètre 48H présentant au moins deux épaulements dont l'un permet de maintenir en place la cage du roulement à billes 53, comme représenté sur la
La portion d'actionnement 50 présente, à son extrémité opposée à l'extrémité portant le filetage extérieur 50F, une empreinte 508. L'empreinte 508 est complémentaire d'un embout 98 d'une manivelle M qui sera décrite plus en détail plus loin.The actuating
Une surface d'extrémité 48H1 de la partie de plus grand diamètre 48H est au contact d'une plaque de friction 49', laquelle est elle-même en contact avec une face du rochet 57. L'autre face du rochet 57 est au contact d'une autre plaque de friction 49, laquelle est elle-même en contact avec une portion d'entraînement 52. La portion d'entraînement 52 se présente sous la forme d'une plaque annulaire, dont l'orifice central est muni de deux surfaces de contact 52J1, 52J2 qui sont complémentaires de deux surfaces correspondantes 50J1, 50J2 que porte la portion d'actionnement 50, comme représenté sur la
Un ou plusieurs éléments élastiques sont prévus entre la portion d'actionnement 50 et la portion d'entraînement 52. Dans l'exemple représenté, ces éléments élastiques sont une pluralité de (en l'espèce, trois) rondelles ressort 51. Les rondelles ressort 51 sont elles-mêmes maintenues en place par un épaulement 50A que présente la portion d'actionnement 50. La portion d'actionnement 50 est elle-même maintenue en place dans un évasement interne du cache B3 par une rondelle 50'.One or more elastic elements are provided between the actuating
Le rochet 57 est monté sur la portion d'actionnement 50 par le biais d'une rondelle 56, de sorte que tant que le cliquet 44 est dégagé du rochet 57, le rochet 57 peut entraîner en rotation la portion d'actionnement 50 et l'arbre d'entraînement 48, et vice versa. The
Le cliquet 44 est configuré pour évoluer entre une première position dans laquelle il n'interfère pas avec le rochet 57, et une deuxième position dans laquelle il interfère avec le rochet 57. Dans l'exemple représenté, le cliquet 44 est monté à pivot par rapport au boîtier B. Plus précisément, le cliquet 44 est monté sur un pivot 43 qui est reçue dans un trou traversant 42A d'une plaque de fixation 42 rapportée à la plaque U1. Le pivot 43 est reçu dans un trou traversant 441 que présente le cliquet 44. Un circlip 43' (visible sur la
Le dispositif D peut comprendre en outre un premier moyen de rappel automatique configuré pour rappeler le cliquet 44 vers la deuxième position. Dans l'exemple représenté, ce premier moyen de rappel automatique est un ressort de torsion R1. L'une des extrémités de fixation R1A du ressort de torsion R1 prend appui sur un bord 42T de la plaque de fixation 42, tandis que l'autre extrémité de fixation R1B du ressort de torsion R1 prend appui sur un bord du cliquet 44. Le ressort de torsion R1 est maintenu en place entre la plaque de fixation 42 et le cliquet 44 par un épaulement 43A que porte le pivot 43. Il est toutefois précisé que le premier moyen de rappel automatique pourrait être configuré différemment, et notamment être un élément élastique autre qu'un ressort de torsion, tant qu'il tend à rappeler le cliquet 44 vers la deuxième position.The device D can further include a first automatic return means configured to return the
Comme représenté sur les
L'organe de commande C est destiné à être manipulé par une personne extérieure, afin de provoquer le passage du cliquet entre la première position et la deuxième position. L'organe de commande C présente ainsi, comme cela est visible sur les
Dans l'exemple représenté, l'organe de commande C est monté sur le cache B3. La portion de manipulation CM est ainsi accessible depuis la face extérieure du cache B3.In the example shown, the control unit C is mounted on the cover B3. The handling portion CM is thus accessible from the exterior face of the cover B3.
La portion de manipulation CM est solidaire d'une portion de commande C1. Cette portion de commande C1 agit sur le cliquet 44, par exemple en coopérant avec une surface du cliquet 44, afin de faire passer le cliquet 44 de la première position à la deuxième position et de la deuxième position à la première position.The handling portion CM is integral with a control portion C1. This control portion C1 acts on the
Dans l'exemple représenté, la portion de commande C1 est montée à pivot par rapport au boîtier. Plus précisément, comme cela est mieux visible sur les
La portion de manipulation CM et la portion de commande C1 peuvent être réalisées par moulage par injection d'un polymère thermoplastique, par exemple par moulage par injection d'acrylonitrile butadiène styrène (ABS). Il est préférable que la portion de manipulation CM et la portion de commande C1 soient réalisées par moulage par injection du même polymère thermoplastique que celui utilisé pour réaliser les demi-coques B1 et B2 et le cache B3.The handling portion CM and the control portion C1 can be produced by injection molding of a thermoplastic polymer, for example by injection molding of acrylonitrile butadiene styrene (ABS). It is preferable that the handling portion CM and the control portion C1 are produced by injection molding of the same thermoplastic polymer as that used to produce the half-shells B1 and B2 and the cover B3.
Le dispositif D peut en outre comprendre un deuxième moyen de rappel automatique configuré pour rappeler la portion de commande C1 vers la position de non-actionnement. Dans l'exemple représenté, ce deuxième moyen de rappel automatique est un ressort de torsion R2. Comme représenté sur la vue partiellement arrachée de la
Comme on l'a mentionné ci-dessus, en manipulant la portion de manipulation CM, la portion de commande C1 peut être amenée d'une position de non-actionnement à une position d'actionnement.As mentioned above, by manipulating the manipulating portion CM, the control portion C1 can be brought from a non-actuating position to an actuating position.
La
Bien que cela ne soit pas indispensable, il est particulièrement préférable que l'empreinte 508 soit masquée par la portion de manipulation CM lorsque la portion de commande C1 est dans la position de non-actionnement. En effet, dans ce cas, il est impossible à la personne extérieure d'utiliser incorrectement le dispositif D en introduisant l'embout 98 de la manivelle M dans l'empreinte 508 alors que le cliquet 44 est dans sa première position dans laquelle il n'interfère pas avec le rochet 57.Although this is not essential, it is particularly preferable that the
On a représenté sur la
On notera que la rainure 442 du cliquet 42 couvre un secteur angulaire plus grand que la languette C12 de la portion de commande C1, ceci afin de créer un débattement entre la rainure 442 et la languette C12 qui permet au cliquet 44 de parvenir à sa deuxième position lorsque la portion de commande C1 est amenée à la position d'actionnement.It will be noted that the
En se référant aux
À titre de comparaison, on a représenté sur la
On a représenté sur la
Une fois ce maximum de déformation atteint, du fait de l'effort exercé par les rondelles ressort 51 sur la portion d'entraînement 52, la plaque de friction 49, le rochet 57, la plaque de friction 49', et la portion de plus grand diamètre 48H, les plaques de friction 49, 49' sont maintenues en contact avec la face correspondante du rochet 57. La friction des plaques de friction 49, 49' contre les deux faces du rochet 57 contribue à bloquer la rotation du rochet 57, ensemble avec l'interférence du cliquet 44 avec le rochet 57. L'enrouleur 1 est ainsi empêché d'entraîner le rochet 57.Once this maximum deformation is reached, due to the force exerted by the
Dans le même temps, toute rotation de la manivelle M après que le maximum de déformation a été atteint entraîne la portion d'actionnement 50, qui entraîne à son tour la portion d'entraînement 52 (du fait de la coopération entre les surfaces 50J1, 50J2 et 52J1, 52J2), l'arbre d'entraînement 48, et donc la roue dentée 55 et finalement l'enrouleur 1.At the same time, any rotation of the crank M after the maximum deformation has been reached drives the
En synthèse, une fois que la personne extérieure a introduit l'embout 98 dans l'empreinte 508 et commencé à tourner la manivelle M, l'entraînement du rochet 57 par l'enrouleur 1 est empêché, tandis que l'arbre d'entraînement 48 peut entraîner l'enrouleur 1 au moins dans le sens d'enroulement E+. En conséquence, seule la rotation de la manivelle M par la personne extérieure peut enrouler ou dérouler la longe 64 autour de l'enrouleur 1. La personne extérieure peut ainsi remonter l'utilisateur du dispositif D à l'aide de la manivelle M, et ce tandis que l'utilisateur ne peut plus chuter puisque le déroulement de la longe 64 n'est possible que par la rotation de la manivelle M.In summary, once the outside person has introduced the
Lorsque la personne extérieure a fini de remonter l'utilisateur du dispositif D à l'aide de la manivelle M, elle peut retirer l'embout 98 de l'empreinte 508, puis laisser la portion de commande C1 être rappelée à la position de non-actionnement par l'action du deuxième moyen de rappel automatique. Le deuxième moyen de rappel automatique impose alors de nouveau la position de la portion de commande C1 au cliquet 44, c'est-à-dire que le cliquet 44 est de nouveau maintenu dans la première position malgré l'action du premier moyen de rappel automatique. Le dispositif D retrouve alors son fonctionnement antichute à rappel automatique.When the external person has finished raising the user of the device D using the crank M, he can remove the
Le dispositif D qui vient d'être décrit offre un fonctionnement particulièrement simple et intuitif pour la personne extérieure, puisqu'il suffit à celle-ci de manipuler la portion de manipulation CM pour que le cliquet 44 soit amené à la deuxième position et permette ainsi à la personne extérieure de remonter l'utilisateur à l'aide de la manivelle M, puis de laisser la portion de commande C1 être rappelée à la position de non-actionnement pour que le cliquet 44 soit de nouveau amené à la première position et permette au dispositif D de fonctionner de nouveau en antichute à rappel automatique.The device D which has just been described offers particularly simple and intuitive operation for the outside person, since it suffices for the latter to manipulate the handling portion CM so that the
On notera que dans le dispositif D qui vient d'être décrit, le rochet 57 peut présenter un nombre arbitraire de dents permettant au cliquet 44 d'interférer avec le rochet 57. En outre, il n'est pas obligatoire que le cliquet 44 interfère un rochet 57 ; le rochet 57 peut être remplacé par n'importe quel élément pouvant être entraîné par l'arbre d'entraînement 48, tant que cet élément matérialise un obstacle avec lequel le cliquet 44 interfère dans la deuxième position et n'interfère pas dans la première position.It will be noted that in the device D which has just been described, the
Il est préférable que, comme représenté sur les
L'évasement R présente de préférence deux portions de butée P1, P2 servant à limiter le déplacement de la portion de manipulation CM dans l'évasement R.The flare R preferably has two stop portions P1, P2 serving to limit the movement of the handling portion CM in the flare R.
Dans ce cas, il est encore plus préférable que la portion de manipulation CM abute contre la paroi de butée P1 lorsque la portion de commande C1 est dans la position de non-actionnement (position représentée sur la
Il est plus préférable encore que l'évasement R, la portion de manipulation CM et l'embout 98 de la manivelle M soient configurés de telle sorte que, lorsque l'embout 98 est reçu dans l'empreinte 508, l'embout 98 maintienne la portion de manipulation CM en butée contre la paroi de butée P2. Le fonctionnement du dispositif D est alors plus intuitif encore pour la personne extérieure, puisque c'est le fait même d'amener la portion de manipulation CM contre la paroi de butée P2 pour introduire l'embout 98 de la manivelle M qui amène le cliquet 44 à la deuxième position, puis c'est le fait même de retirer l'embout 98 de la manivelle M qui amène de nouveau la portion de manipulation CM en butée contre la paroi de butée P1 et le cliquet 44 à la première position.It is even more preferable that the flare R, the handling portion CM and the
La manivelle M peut en principe avoir toute géométrie adaptée, tant qu'elle présente un embout 98 complémentaire de l'embout 508 et permet ainsi à la personne extérieure d'entraîner en rotation l'arbre d'entraînement 48 en tournant la manivelle M. Toutefois, il est préférable que la manivelle M présente la configuration représentée sur les
Comme représenté sur ces figures, l'embout 98 est porté par une première portion 97, qui est planaire et est solidaire d'une deuxième portion 100, qui est elle aussi planaire et forme un angle obtus avec la première portion 97. La première portion planaire 97 et la deuxième portion planaire 100 peuvent par exemple réalisées par coulée ou par usinage d'un alliage métallique, par exemple d'acier galvanisé. La deuxième portion planaire 100 présente à l'une de ses extrémités un rivet 101, à l'aide duquel une poignée 99 est fixée à la deuxième portion planaire 100. En manipulant la poignée 99, l'utilisateur pout tourner la manivelle M de façon à entraîner en rotation l'arbre d'entraînement 48.As shown in these figures, the
Le boîtier B, porte de préférence au moins un élément de maintien configuré pour maintenir en place la manivelle M en place sur le boîtier B. Dans l'exemple représenté, c'est la demi-coque B1 qui porte plusieurs éléments de maintien, lesquels se présentent sous la forme de paires de clips élastiques 96, réalisés en un thermoplastique, par exemple en polycarbonate (PC). Il est toutefois précisé que d'autres types d'éléments de maintien sont envisageables et que tous ou certains de ces éléments de maintien pourraient être disposés sur le boîtier B ailleurs que sur la demi-coque B1.The housing B preferably carries at least one holding element configured to hold the crank M in place on the housing B. In the example shown, it is the half-shell B1 which carries several holding elements, which are in the form of pairs of
On notera que l'angle obtus formé par la première portion planaire 97 et la deuxième portion planaire 100 peut être choisi de façon à être sensiblement égal à un angle formé par une surface extérieure du boîtier B, de sorte que la première portion planaire 97 et la deuxième portion planaire 100 suivent sensiblement la courbure extérieure du boîtier. Ceci permet de transporter la manivelle M ensemble avec le dispositif B de façon compacte.It will be noted that the obtuse angle formed by the first
On a représenté sur la
Ce dispositif de protection antichute comprend le système antichute comprenant le dispositif D et la manivelle M, la longe 64 décrite ci-dessus et enroulée autour de l'enrouleur 1 du dispositif, et une armature A.This fall protection device comprises the fall protection system comprising the device D and the crank M, the
Dans l'exemple représenté, l'armature A est un trépied destiné à être disposé au-dessus d'un regard E de canalisation. Le dispositif D est fixé à l'armature A, par exemple à l'aide d'un mousqueton. La longe 64 est déroulée partiellement en-dehors du dispositif D et passe par un sommet A1 de l'armature A, de sorte que l'utilisateur peut descendre et remonter dans le regard E en étant maintenu par la longe 64, après avoir accroché son équipement de protection individuel au crochet 70.In the example shown, the armature A is a tripod intended to be placed above a pipe manhole E. The device D is fixed to the frame A, for example using a carabiner. The
Bien entendu, l'armature A peut être de tout type connu dans le domaine de la protection antichute, tant qu'elle offre un point d'ancrage pour le dispositif D qui est suffisamment robuste pour protéger l'utilisateur du dispositif D contre la chute et pour permettre à une personne extérieure de remonter l'utilisateur.Of course, the frame A can be of any type known in the field of fall protection, as long as it offers an anchoring point for the device D which is sufficiently robust to protect the user of the device D against falling. and to allow an outside person to reassemble the user.
Il est également bien entendu que le dispositif de protection antichute décrit peut être utilisé pour protéger l'utilisateur dans n'importe quel espace confiné autre qu'un regard de canalisation, par exemple une cheminée ou une gaine technique d'un bâtiment.It is also understood that the fall protection device described can be used to protect the user in any confined space other than a manhole, for example a chimney or a service duct of a building.
On a représenté sur la
Dans cette variante, le dispositif de protection antichute comprend une source de puissance mécanique P pouvant être utilisée à la place de la manivelle M. La source de puissance mécanique P comprend ainsi un arbre 98' présentant un embout 98P complémentaire de l'empreinte 508. La source de puissance mécanique P peut être de tout type approprié ; il peut notamment s'agir d'un moteur électrique, éventuellement alimenté par une batterie.In this variant, the fall protection device comprises a source of mechanical power P that can be used in place of the crank M. The source of mechanical power P thus comprises a shaft 98 'having a
L'utilisation du dispositif D dans cette variante est identique à celle décrite en rapport avec les
Claims (7)
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| FR1910722A FR3101253B1 (en) | 2019-09-27 | 2019-09-27 | Fall arrest device, preferably self-closing |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| EP3797836A1 true EP3797836A1 (en) | 2021-03-31 |
Family
ID=68987975
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP20197085.2A Pending EP3797836A1 (en) | 2019-09-27 | 2020-09-21 | Fall-prevention device, preferably with automatic return |
Country Status (2)
| Country | Link |
|---|---|
| EP (1) | EP3797836A1 (en) |
| FR (1) | FR3101253B1 (en) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN113856085A (en) * | 2021-11-03 | 2021-12-31 | 东方电子股份有限公司 | Speed difference falling protector with reverse locking mechanism for high-altitude operation of electric power iron tower |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US1124938A (en) * | 1912-04-17 | 1915-01-12 | Simplex Self Hoisting Machine Company | Hoisting device. |
| US4489919A (en) * | 1983-03-21 | 1984-12-25 | Meyer Ostrobrod | Safety winch with disengageable drive |
| US20080035423A1 (en) * | 2006-08-08 | 2008-02-14 | D B Industries, Inc. | Retractable horizontal lifeline assembly |
-
2019
- 2019-09-27 FR FR1910722A patent/FR3101253B1/en active Active
-
2020
- 2020-09-21 EP EP20197085.2A patent/EP3797836A1/en active Pending
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US1124938A (en) * | 1912-04-17 | 1915-01-12 | Simplex Self Hoisting Machine Company | Hoisting device. |
| US4489919A (en) * | 1983-03-21 | 1984-12-25 | Meyer Ostrobrod | Safety winch with disengageable drive |
| US20080035423A1 (en) * | 2006-08-08 | 2008-02-14 | D B Industries, Inc. | Retractable horizontal lifeline assembly |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN113856085A (en) * | 2021-11-03 | 2021-12-31 | 东方电子股份有限公司 | Speed difference falling protector with reverse locking mechanism for high-altitude operation of electric power iron tower |
Also Published As
| Publication number | Publication date |
|---|---|
| FR3101253A1 (en) | 2021-04-02 |
| FR3101253B1 (en) | 2022-12-02 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP2637747B1 (en) | Safety securing device and securing assembly comprising such a device | |
| EP0859648B1 (en) | Device for automatically stopping the fall of personnel working high above ground | |
| EP2965647B1 (en) | Device for winding and ratchet locking of a drawstring | |
| FR2748078A1 (en) | PULLEY WITH PIVOTING FLANGE AND INTEGRATED LOCKER | |
| EP1486294A1 (en) | Extension pole for actuating a hand-held tool | |
| WO2014187821A1 (en) | Device for applying temporary fasteners | |
| FR2656267A1 (en) | SECURITY BELT REELS. | |
| EP3797836A1 (en) | Fall-prevention device, preferably with automatic return | |
| WO2017072437A1 (en) | Fall-prevention device with automatic return | |
| EP0255788A1 (en) | Seat belt webbing retractor | |
| EP0089879B1 (en) | Fast locking and unlocking safety belt retractor with reduced operating noise | |
| FR2715965A1 (en) | Safety device against falling, in particular for overhead doors. | |
| EP1589184A1 (en) | Roller blind comprising a device for axial blocking of an axle section encased in a support wing | |
| EP1571287A1 (en) | Roller shutter to protect an opening, in particular a window, a door or similar | |
| FR2740765A1 (en) | Capstan traction tool for dismantling coupling collars used in IC- engines | |
| FR2813299A1 (en) | Spare wheel retainer for motor vehicle has hand crank with gear reduction drive to push shaft retaining wheel in place | |
| FR2754719A1 (en) | Safety harness for high altitude worker | |
| FR3057170A1 (en) | FALLING BRAKE DEVICE WITH ROLLING BRAKE | |
| FR2897096A1 (en) | VERTICAL DISPLACEMENT ROLLING DEVICE FAN SPRING HOUSING. | |
| FR2793837A1 (en) | Anti-collapse safety closing mechanism for vertical metallic shutters does not interfere with complete closing of shutter as user can pull shutter so as to overcome friction forces on ring by flanges | |
| EP4039937A1 (en) | Device for winding a blind fabric | |
| WO2015180990A1 (en) | Automatically retractable leash | |
| FR2961248A1 (en) | MOTORIZED STORAGE MONO-ORDER | |
| EP2636559A1 (en) | Device for automatic winding of straps | |
| WO2008080975A1 (en) | Anti-intrusion device for luggage |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: THE APPLICATION HAS BEEN PUBLISHED |
|
| AK | Designated contracting states |
Kind code of ref document: A1 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| AX | Request for extension of the european patent |
Extension state: BA ME |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: REQUEST FOR EXAMINATION WAS MADE |
|
| 17P | Request for examination filed |
Effective date: 20210903 |
|
| RBV | Designated contracting states (corrected) |
Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| P01 | Opt-out of the competence of the unified patent court (upc) registered |
Effective date: 20230513 |
|
| P02 | Opt-out of the competence of the unified patent court (upc) corrected |
Effective date: 20230517 |