EP3636400A1 - Prehenseur modulaire pour piece de carrosserie de vehicule - Google Patents
Prehenseur modulaire pour piece de carrosserie de vehicule Download PDFInfo
- Publication number
- EP3636400A1 EP3636400A1 EP19194123.6A EP19194123A EP3636400A1 EP 3636400 A1 EP3636400 A1 EP 3636400A1 EP 19194123 A EP19194123 A EP 19194123A EP 3636400 A1 EP3636400 A1 EP 3636400A1
- Authority
- EP
- European Patent Office
- Prior art keywords
- gripper
- tool holder
- fusible
- base
- support
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 238000004873 anchoring Methods 0.000 claims description 22
- 238000000034 method Methods 0.000 claims description 7
- 239000007787 solid Substances 0.000 claims description 5
- 229910000838 Al alloy Inorganic materials 0.000 claims description 3
- 230000006870 function Effects 0.000 description 10
- 229910000831 Steel Inorganic materials 0.000 description 3
- 239000010959 steel Substances 0.000 description 3
- XEEYBQQBJWHFJM-UHFFFAOYSA-N Iron Chemical compound [Fe] XEEYBQQBJWHFJM-UHFFFAOYSA-N 0.000 description 2
- HCHKCACWOHOZIP-UHFFFAOYSA-N Zinc Chemical compound [Zn] HCHKCACWOHOZIP-UHFFFAOYSA-N 0.000 description 2
- 230000000712 assembly Effects 0.000 description 2
- 238000000429 assembly Methods 0.000 description 2
- 238000005553 drilling Methods 0.000 description 2
- 230000000694 effects Effects 0.000 description 2
- 238000009434 installation Methods 0.000 description 2
- 238000004519 manufacturing process Methods 0.000 description 2
- 230000008569 process Effects 0.000 description 2
- 239000011701 zinc Substances 0.000 description 2
- 229910052725 zinc Inorganic materials 0.000 description 2
- VYZAMTAEIAYCRO-UHFFFAOYSA-N Chromium Chemical compound [Cr] VYZAMTAEIAYCRO-UHFFFAOYSA-N 0.000 description 1
- RYGMFSIKBFXOCR-UHFFFAOYSA-N Copper Chemical compound [Cu] RYGMFSIKBFXOCR-UHFFFAOYSA-N 0.000 description 1
- FYYHWMGAXLPEAU-UHFFFAOYSA-N Magnesium Chemical compound [Mg] FYYHWMGAXLPEAU-UHFFFAOYSA-N 0.000 description 1
- XUIMIQQOPSSXEZ-UHFFFAOYSA-N Silicon Chemical compound [Si] XUIMIQQOPSSXEZ-UHFFFAOYSA-N 0.000 description 1
- RTAQQCXQSZGOHL-UHFFFAOYSA-N Titanium Chemical compound [Ti] RTAQQCXQSZGOHL-UHFFFAOYSA-N 0.000 description 1
- 230000009471 action Effects 0.000 description 1
- 229910045601 alloy Inorganic materials 0.000 description 1
- 239000000956 alloy Substances 0.000 description 1
- 230000015556 catabolic process Effects 0.000 description 1
- 229910052804 chromium Inorganic materials 0.000 description 1
- 239000011651 chromium Substances 0.000 description 1
- 230000000295 complement effect Effects 0.000 description 1
- 239000012141 concentrate Substances 0.000 description 1
- 229910052802 copper Inorganic materials 0.000 description 1
- 239000010949 copper Substances 0.000 description 1
- 229910052742 iron Inorganic materials 0.000 description 1
- 238000003754 machining Methods 0.000 description 1
- 229910052749 magnesium Inorganic materials 0.000 description 1
- 239000011777 magnesium Substances 0.000 description 1
- WPBNNNQJVZRUHP-UHFFFAOYSA-L manganese(2+);methyl n-[[2-(methoxycarbonylcarbamothioylamino)phenyl]carbamothioyl]carbamate;n-[2-(sulfidocarbothioylamino)ethyl]carbamodithioate Chemical compound [Mn+2].[S-]C(=S)NCCNC([S-])=S.COC(=O)NC(=S)NC1=CC=CC=C1NC(=S)NC(=O)OC WPBNNNQJVZRUHP-UHFFFAOYSA-L 0.000 description 1
- 239000000463 material Substances 0.000 description 1
- 229910052751 metal Inorganic materials 0.000 description 1
- 239000002184 metal Substances 0.000 description 1
- 150000002739 metals Chemical class 0.000 description 1
- 230000001737 promoting effect Effects 0.000 description 1
- 230000001681 protective effect Effects 0.000 description 1
- 230000009993 protective function Effects 0.000 description 1
- 230000008439 repair process Effects 0.000 description 1
- 229910052710 silicon Inorganic materials 0.000 description 1
- 239000010703 silicon Substances 0.000 description 1
- 125000006850 spacer group Chemical group 0.000 description 1
- 229910052719 titanium Inorganic materials 0.000 description 1
- 239000010936 titanium Substances 0.000 description 1
- 238000013024 troubleshooting Methods 0.000 description 1
Images

Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J19/00—Accessories fitted to manipulators, e.g. for monitoring, for viewing; Safety devices combined with or specially adapted for use in connection with manipulators
- B25J19/06—Safety devices
- B25J19/063—Safety devices working only upon contact with an outside object
- B25J19/065—Mechanical fuse
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J15/00—Gripping heads and other end effectors
- B25J15/0052—Gripping heads and other end effectors multiple gripper units or multiple end effectors
- B25J15/0061—Gripping heads and other end effectors multiple gripper units or multiple end effectors mounted on a modular gripping structure
Definitions
- the invention relates to the field of tools for transporting or handling bodywork elements intended, for example, to equip factories for the manufacture of motor vehicles.
- the invention relates to a modular gripping system for bodywork elements, such as door panels or body sides of a motor vehicle.
- the body parts are caused to be moved between different positions by manipulating robots.
- robots include an arm at the end of which is attached a gripping system, or gripper, configured to hold a part for its movement.
- Said grippers can, for example, comprise a support structure in the form of a tube extending in a main direction, on which are mounted various gripping tools positioned on either side of the support structure in a manner specific to the workpiece .
- This gripping system has been shown to be very effective in handling the bodywork elements.
- this gripping system Since its conception, this gripping system has been improved and in particular has been added a protection system for its components (beam, support means, gripping tools) in the event of an impact.
- at least one support part of a tool holder has been provided with a fuse zone showing reduced mechanical resistance.
- the tool holder breaks, which protects the rest of the system.
- the support part of the tool holder breaks at its fuse zone, its replacement causes production to stop. This is generally a long stop because this part, in addition to a fuse function, also has a function for adjusting the position of the tool it carries.
- the development of a new setting when replacing this part can sometimes take up to three-quarters of an hour, which does not allow internal objectives in terms of breakdown time to be met.
- a solution remains to be found to reduce the troubleshooting time while retaining a protective function of the gripper components by means of a fuse zone.
- the invention aims to overcome the drawbacks of the prior art by proposing a new gripping system configured to provide a protection function by fuse zone without affecting the adjustment of the tool holder (s).
- the invention relates to a gripper comprising at least one structural beam, at least one gripping tool and at least one means for supporting a gripping tool, said supporting means comprising an arm at the end of which is mounted a tool holder, the arm comprising a base for fixing to a structural beam and a support part for the tool holder, the gripper being remarkable in that the arm further comprises a fusible part showing at least one zone of reduced mechanical resistance so as to rupture under the application of a force greater than a given threshold, said fusible part being arranged between the support part of the tool holder and the base.
- the invention consists in shifting the protection function by fuse zone to another part than the support part of the tool holder.
- the invention will dissociate the adjustment function from the protection fuse function so that there is no need to re-adjust the relative positions of the torque formed by the tool holder and its support part in arm breakage.
- Such a configuration makes it possible to significantly reduce repair times.
- the support part of the tool holder no longer shows a fuse zone, the latter is shown by an intermediate part designed for this purpose and which, preferably, does not show an adjustment function or else a simple adjustment in only one direction.
- the gripper further comprises an interface for attachment to a handling robot arm.
- Said fixing interface is preferably fixedly mounted on the structural beam (s).
- the gripper comprises at least two assemblies each provided with a gripping tool and a support means. Even more advantageously, the gripper comprises as many assemblies formed by a support means and a gripping tool as necessary.
- At least one fusible part is in the form of a connection sleeve configured to make the connection between the support part of the tool holder and the base or between the support part of the tool holder and a slide mounted on the 'base.
- the overall shape of the fusible part in the form of a tubular sleeve, makes it a simple component to produce and of moderate cost which has little effect on the overall cost of the gripper.
- At least one fusible part is a tubular part which has two ends and a shoulder along its length so that one of the ends shows a diameter greater than the diameter shown by the other end.
- the larger diameter end is intended to cooperate with the support part of the tool holder.
- At least one fusible part shows a zone of reduced mechanical resistance arranged at the base of the shoulder, that is to say on the part of the part of smaller diameter.
- the reduced resistance zone extends over the entire circumference of the smaller diameter end and is arranged at the base of the shoulder.
- the fusible element concentrates the maximum stresses whatever the level of force applied or the direction of the force applied to the various elements of the gripper.
- At least one fusible part is inserted by its end of smaller diameter in a hollow body presented by a base or in a hollow body formed by a slide.
- the fusible part is inserted into the hollow body until the end of the hollow body comes to stop against the external surface of the shoulder.
- the fitting diameter of the fusible part in the hollow body is the same as that shown by the anchoring foot of the support part of the tool holder.
- said fitting diameter is between 20 and 25 mm and, preferably, is 22 mm.
- a small connection radius increases the stress concentrations.
- At least one support part for the tool holder comprises an anchoring foot inserted in a fusible part; preferably, until the anchoring foot abuts against the internal surface of the shoulder.
- the abutment of the parts against the shoulder of the fuse part makes it possible to dispense with a step of adjusting the relative positioning of the parts and therefore to offer the possibility of a standardized and effortlessly repeatable positioning.
- the gripper is remarkable in that the zone of reduced mechanical resistance of at least one fusible part is a zone showing a reduced thickness compared to the thickness shown by the rest of the body. of said fuse part.
- At least one arm is a telescopic arm comprising a base and a slide mounted slidingly adjustable on said base.
- at least one arm is telescopic and comprises a base mounted on the beam, a slide and a sleeve, so that the slide is mounted adjustable in sliding on said base, and / or the sleeve is mounted adjustable in sliding on said slide.
- the support part of the tool holder comprises an anchoring foot showing a free end
- the gripper is remarkable in that the support part of the tool holder comprises a solid section anchoring foot and / or in that the support part of the tool holder comprises a ball joint for fixing the tool holder and the free end of the anchoring foot is disposed at least 8 cm from the center of the ball joint; preferably at least 10 cm.
- the position of the reduced resistance zone with respect to the load is more distant in the invention compared to the prior art, this makes the gripper more tolerant to the stresses generated by severe applications of shoeing processes and eliminates the unexpected breaks.
- the gripper is stronger while retaining a protective fuse function.
- the fusible part is made of an aluminum alloy of the 7075 type.
- This material is advantageous in that it is more brittle than the steel from which the support part of the tool holder is made. Also, when the elastic limit is reached, the fusible member will suddenly break without going through a phase of permanent deformation which is difficult to detect.
- the invention relates to a method of mounting a gripper according to the first aspect, the method being remarkable in that it comprises a step of mounting a support piece of a tool holder on a fusible element showing at least one zone of mechanical resistance reduced so as to break under the application of a force greater than a given threshold.
- the support part showing an anchoring foot and the fusible part being tubular said mounting step comprises fitting said anchoring foot into said fusible part.
- the support part is pressed into the fusible part until the anchoring foot comes to stop against the internal surface of the shoulder.
- the fixing is carried out by the installation of a pin after counter-drilling of the anchoring foot.
- the method further comprises a step of mounting a fusible part on a hollow body carried by the base or formed by a slide mounted on said base.
- the fusible part is pressed into the hollow body until the end of the hollow body abuts against the external surface of the shoulder.
- the fixing is carried out by the installation of a pin after counter-drilling of the fuse part.
- understand is synonymous with “include” and is not limiting as regards the presence of other elements in the gripper or of other steps in the process to which it relates. It is understood that the term “understand” includes the terms “consist of”. In the different figures, the same references designate identical or similar elements.
- the figure 1 having been commented on in the introductory part, we will now refer to the figure 2 illustrating a gripper 13 according to the invention.
- the method of mounting (or repairing) the gripper and the gripper as such will be described jointly.
- the gripper 13 comprises a general structure similar to that of the prior art with at least one structural beam 3, at least one tool 7 for gripping and at least one support means 11 for a tool 7 for gripping.
- the structural beam (s) 3 preferably consist of a steel profile which is, for example, in the form of a tube or a bar.
- the beam (s) 3 advantageously show a circular profile in order to facilitate the adjustment of the position of the arm (s) on the beam concerned.
- the gripper 13 may comprise a beam 3 of central structure, but it is conceivable that it comprises two parallel beams and integral with one another in particular by means of one or more spacers.
- a multi-beam architecture is advantageous for gripping heavy body parts.
- the structural beam (s) 3 are understood to be in a main direction and the support means (11) generally extend in a direction not parallel to said main direction, generally orthogonal thereto.
- the gripper 13 also comprises an interface 5 for attachment to a handling robot hand generally mounted in a fixed manner on the support beam (s) 3.
- the attachment interface 5 comprises a fixing plate and a device for fixing said plate to the support beam (s) 3.
- the fixing interface 5 is mounted in the central part of the support beam (s) 3.
- the gripper 13 will present in known manner at least one, preferably at least two and more preferably at least three gripping tools 7 designed for gripping a bodywork part 9.
- the gripping tools 7 include a means for clamping the bodywork part 9, in particular of the clamp type and / or at least one suction cup.
- the pliers may be of the mechanical type and be in the form of a collet with a clamping jaw. Optionally, they can be of the electromagnetic type.
- the tools can also include or be in the form of one or more holding suction cups. A person skilled in the art can envisage the use of other gripping tools.
- Each gripping tool 7 is mounted on the beam by a support means 11 illustrated in figure 3 and comprising an arm 15 at the end of which is fixed a tool holder 17.
- the arm 15 comprises a base 19 for fixing to a structural beam (not shown in figure 3 ) and a support part 21 of the tool holder 17.
- the gripper according to the invention is remarkable in that the arm 15 further comprises a fusible part 23 showing at least one zone with a reduced mechanical resistance so as to break under the application of a force greater than a given threshold, said fuse part 23 being arranged between the support part 21 of the tool holder 17 and the base 19.
- the base 19 comprises a stirrup consisting of a semi-annular flange 25 and a semi-annular counter-flange (visible in figure 5 ) mounted tightly around the beam concerned, said stirrup being adjustable in sliding and rotation on said beam before tightening the counter-flange on the flange.
- the gripper therefore offers two first possibilities for adjusting the position of the gripping tool.
- the base 19 further comprises a tubular hollow body 27 projecting from the flange 25 and in which the fuse part 23 is mounted.
- the fuse part 23 can be mounted so that it can slide.
- a slide is mounted so that it can slide on the hollow body of said base.
- This architecture is advantageous in that it makes it possible to form a telescopic arm 15 adjustable in length.
- the adjustment is made by selecting a base 19 whose hollow body 27 shows an adequate length and the mounting of the part.
- fuse 23 is made in a standard position at the free end of said hollow body 27.
- the possibility of varying the length of the arm or arms 15 is a third possibility of adjusting the position of the gripping tool or tools 7.
- the position of the fuse piece 23 can be fixed by screwing, possibly with a pin for holding in position.
- the fuse piece 23 is configured to make the connection between the support piece 21 of the tool holder and the base 19 or between the support piece of the tool holder and a slide mounted on the base. It is a connecting piece which can be in the form of a bar.
- the fusible part 23 is a connecting part showing two ends (29, 31) and being in the form of a sleeve and therefore shows a hollow structure of tubular type.
- the fusible part 23 is placed on or in the hollow body 27 or slides by one of its ends 29 and collaborates with a support part 21 of the tool holder 17 by means of its other end 31.
- At least one fusible part is a tubular part having two ends (29, 31) and a shoulder 33 along its length so that one of the ends 31 shows a diameter greater than the diameter shown by l 'other end 29.
- the end 31 of larger diameter is intended to cooperate with the support part 21 of the tool holder.
- This configuration offers two advantages: on the one hand, it makes it possible to use a support piece 21 of the tool holder which includes an anchoring foot 37 of solid section, therefore more solid, which promotes rupture at the level of the fuse part 23 and not of the support part 21 of the tool holder. On the other hand, this makes it possible to use a support part 21 of the tool holder whose anchoring foot 37 has a larger diameter than in the prior art, therefore also more solid.
- At least one fusible part 23 shows an area 35 of reduced mechanical resistance (visible in figure 5 ) arranged at the base of the shoulder 33 on the part of the part of smaller diameter.
- the zone 35 of reduced mechanical resistance of at least one fusible part is a zone showing a reduced thickness compared to the thickness shown by the rest of the body of said fusible part 23.
- the thickness is understood to be the difference between the inside diameter and the outside diameter of said tube. This zone or section of reduced thickness can be obtained by machining the external surface of said tube.
- the fusible part 23 is a part showing no adjustment function so that its replacement is as rapid as possible, the adjustment functions being carried by d 'other rooms.
- the shoulder 33 shown by the fusible piece 23 plays a role since it allows positioning standard and repeatable of the fusible piece 23 relative to the base 19 or the slide on the one hand and / or relative to the support piece 21 of the tool holder.
- At least one fusible part 23 is inserted by its end 29 of smaller diameter in a hollow body 27 presented by a base 19 or in a hollow body formed by a slide.
- the fusible part 23 is inserted into the hollow body 27 until the end of the hollow body comes to abut against the external surface of the shoulder 33.
- the position of the support piece 21 is fixed, for example, by screwing at least one screw 43 (visible in figure 5 ) and by at least one additional pin 41.
- At least one support part for the tool holder comprises an anchoring foot inserted in a fusible part; preferably until the anchoring foot abuts against the internal surface of the shoulder.
- the position of the tool holder 17 on the arm 15 can be adjusted according to a fourth possibility of adjusting the position of the tool, namely by adjusting the rotation of the tool.
- the tool holder will advantageously include a ball joint 39 intended to cooperate with complementary means, such as a hemispherical cavity, carried by the tool holder 17.
- at least one support piece 21 of the tool holder comprises a ball joint 39 for fixing the tool holder 17 and the free end of the anchoring foot 37 is disposed at least 8 cm from the center of the ball joint 39; preferably at least 10 cm. This arrangement is advantageous by the leverage effect it provides.
- the reduced mechanical resistance zone 35 is in fact offset with respect to the center of the ball joint 39 with respect to the configuration known in the prior art, which makes it possible to lift larger masses. Indeed, in the prior art, the fusible area was at the base of the ball joint.
- the fusible part 23 is not made of steel, but of an aluminum alloy of the 7075 type.
- This type of zinc-based alloy is known and commercially available. It has about 5.6 to 6.1% zinc, 2.1-2.5% magnesium, 1.2 to 1.6% copper, and less than 0.5% silicon, iron, manganese , titanium, chromium and other metals. It is notably marketed under the Fortal brand.
Landscapes
- Engineering & Computer Science (AREA)
- Robotics (AREA)
- Mechanical Engineering (AREA)
- Manipulator (AREA)
- Insertion Pins And Rivets (AREA)
- Vehicle Cleaning, Maintenance, Repair, Refitting, And Outriggers (AREA)
Abstract
Description
- L'invention se situe dans le domaine de l'outillage pour le transport ou la manipulation d'éléments de carrosserie destinés, par exemple, à équiper les usines de fabrication de véhicules automobiles. En particulier, l'invention concerne un système de préhension modulaire d'éléments de carrosserie, tels que des panneaux de porte ou des côtés de caisse de véhicule automobile.
- Dans les lignes d'emboutissage, de ferrage ou encore de montage, les pièces de carrosserie sont amenées à être déplacées entre différents postes par des robots manipulateurs. Ces robots comprennent un bras au bout duquel se fixe un système de préhension, ou préhenseur, configuré pour tenir une pièce en vue de son déplacement. Lesdits préhenseurs peuvent, par exemple, comprendre une structure porteuse sous forme de tube s'étendant selon une direction principale, sur laquelle sont montés divers outils de préhension positionnés de part et d'autre de la structure porteuse de manière spécifique à la pièce à porter.
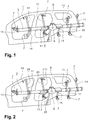
- Un exemple d'un tel système de préhension est donné par le document
FR2972702 figure 1 montre un exemple de réalisation d'un système de préhension 1 selon cet art antérieur. Comme on peut le voir, le système de préhension 1 comprend au moins une poutre de structure 3 ; un moyen d'amarrage 5 sur un robot de manipulation monté librement sur la ou les poutres 3 ; plusieurs outils 7 de préhension conçus pour la préhension d'une pièce de carrosserie 9 ; et plusieurs moyens de support 11 des outils 7 de préhension comportant chacun : - une embase montée réglable en coulissement sur la poutre et réglable en rotation par rapport à la poutre ;
- une coulisse montée réglable en coulissement par rapport à l'embase ; et
- un porte-outil monté réglable en rotation sur la coulisse au moyen d'une pièce de support comprenant une rotule, et portant l'outil de préhension concerné.
- Ce système de préhension s'est montré très efficace pour la manipulation des éléments de carrosserie.
- Depuis sa conception, ce système de préhension a été amélioré et notamment s'est vu adjoindre un système de protection de ses composants (poutre, moyens de support, outils de préhension) en cas de choc. A cet effet, au moins une pièce de support d'un porte-outil a été dotée d'une zone fusible montrant une résistance mécanique diminuée. Ainsi, en cas de choc, le porte-outil se rompt, ce qui protège le reste du système. Malheureusement, lorsque la pièce de support du porte-outil se rompt au niveau de sa zone fusible, son remplacement occasionne un arrêt de la production. Il s'agit généralement d'un arrêt long car cette pièce, en plus d'une fonction fusible, a également une fonction de réglage de la position de l'outil qu'il porte. La mise au point d'un nouveau réglage lors du remplacement de cette pièce peut parfois prendre jusqu'à trois quarts d'heure, ce qui ne permet pas de respecter les objectifs internes en matière de temps de dépannage.
- Une solution reste à trouver pour diminuer le temps de dépannage tout en conservant une fonction de protection des composants du préhenseur au moyen d'une zone fusible.
- L'invention a pour objectif de pallier les inconvénients de l'art antérieur en proposant un nouveau système de préhension configuré pour assurer une fonction de protection par zone fusible sans affecter le réglage du ou des porte-outils.
- A cet effet, et selon un premier aspect, l'invention a pour objet un préhenseur comprenant au moins une poutre de structure, au moins un outil de préhension et au moins un moyen de support d'un outil de préhension, ledit moyen de support comprenant un bras au bout duquel est monté un porte-outil, le bras comprenant une embase de fixation à une poutre de structure et une pièce de support du porte-outil, le préhenseur étant remarquable en ce que le bras comprend en outre une pièce fusible montrant au moins une zone de résistance mécanique amoindrie de manière à se rompre sous l'application d'une force supérieure à un seuil donné, ladite pièce fusible étant agencée entre la pièce de support du porte-outil et l'embase.
- Comme on l'aura compris à la lecture de la définition qui vient d'en être donnée, l'invention consiste à déporter la fonction de protection par zone fusible sur une autre pièce que la pièce de support du porte-outil. Ainsi, l'invention va dissocier la fonction réglage de la fonction fusible de protection de manière à ce qu'il n'y ait pas besoin de régler à nouveau les positions relatives du couple formé par le porte-outil et sa pièce de support en cas de rupture du bras. Une telle configuration permet de diminuer les temps de réparation de manière significative. La pièce de support du porte-outil ne montre plus de zone fusible, cette dernière est montrée par une pièce intermédiaire conçue à cet effet et qui, préférentiellement, ne montre pas de fonction de réglage ou bien un réglage simple selon une seule direction.
- Idéalement, le préhenseur comprend en outre une interface de fixation à un bras de robot de manipulation. Ladite interface de fixation est préférentiellement montée fixement sur la ou les poutres de structures.
- Avantageusement, le préhenseur comprend au moins deux ensembles dotés chacun un outil de préhension et un moyen de support. De manière encore plus avantageuse, le préhenseur comprend autant d'ensembles formés par un moyen de support et un outil de préhension que nécessaire.
- Préférentiellement, au moins une pièce fusible se présente sous une forme de manchon de raccordement configuré pour faire la liaison entre la pièce de support du porte-outil et l'embase ou entre la pièce de support du porte-outil et une coulisse montée sur l'embase. La forme globale de la pièce fusible, sous forme de manchon tubulaire, en fait un composant simple à réaliser et d'un coût modéré qui affecte peu le coût global du préhenseur.
- Selon un mode de réalisation préféré de l'invention, au moins une pièce fusible est une pièce tubulaire qui présente deux extrémités et un épaulement sur sa longueur de manière à ce qu'une des extrémités montre un diamètre supérieur au diamètre montré par l'autre extrémité. De préférence, l'extrémité de plus grand diamètre est destinée à coopérer avec la pièce de support du porte-outil.
- Selon une caractéristique de l'invention, au moins une pièce fusible montre une zone de résistance mécanique amoindrie agencée à la base de l'épaulement, c'est-à-dire sur la partie de la pièce de plus petit diamètre. De préférence, la zone de résistance amoindrie s'étend sur toute la circonférence de l'extrémité de plus petit diamètre et est agencée à la base de l'épaulement.
- Par le dimensionnement de la pièce fusible, le caractère multidirectionnel de sa zone de résistance mécanique amoindrie, et sa position dans l'assemblage ; la pièce fusible concentre les contraintes maximales quel que soit le niveau d'effort appliqué ou la direction de l'effort appliqué sur les différents éléments du préhenseur.
- Idéalement, au moins une pièce fusible est insérée par son extrémité de plus petit diamètre dans un corps creux présenté par une embase ou dans un corps creux formé par une coulisse. De préférence, la pièce fusible est insérée dans le corps creux jusqu'à ce que l'extrémité du corps creux vienne se placer en butée contre la surface externe de l'épaulement.
- Avantageusement, le diamètre d'emmanchement de la pièce fusible dans le corps creux est le même que celui montré par le pied d'ancrage de la pièce de support du porte-outil. Par exemple, ledit diamètre d'emmanchement est compris entre 20 et 25 mm et, de préférence, est de 22 mm. Un rayon de raccordement faible augmente les concentrations de contrainte.
- De manière complémentaire ou alternative, au moins une pièce de support du porte-outil comprend un pied d'ancrage inséré dans une pièce fusible ; de préférence, jusqu'à ce que le pied d'ancrage se place en butée contre la surface interne de l'épaulement.
- La mise en butée des pièces contre l'épaulement de la pièce fusible permet de s'affranchir d'une étape de réglage du positionnement relatif des pièces et donc d'offrir la possibilité d'un positionnement standardisé et répétable sans effort.
- Avantageusement, la ou les pièces fusibles montrant un corps, le préhenseur est remarquable en ce que la zone de résistance mécanique amoindrie d'au moins une pièce fusible est une zone montrant une épaisseur réduite par rapport à l'épaisseur montrée par le reste du corps de ladite pièce fusible.
- Eventuellement, au moins un bras est un bras télescopique comprenant une embase et une coulisse montée réglable en coulissement sur ladite embase. Préférentiellement, au moins un bras est télescopique et comprend une embase montée sur la poutre, une coulisse et un manchon, de manière à ce que la coulisse soit montée réglable en coulissement sur ladite embase, et/ou le manchon soit monté réglable en coulissement sur ladite coulisse.
- Selon un mode de réalisation particulier, la pièce de support du porte-outil comprend un pied d'ancrage montrant une extrémité libre, le préhenseur est remarquable en ce que la pièce de support du porte-outil comprend un pied d'ancrage de section pleine et/ou en ce que la pièce de support du porte-outil comprend une rotule pour la fixation du porte-outil et l'extrémité libre du pied d'ancrage est disposée à au moins 8 cm du centre de la rotule ; de préférence à au moins 10 cm. La position de la zone de résistance amoindrie par rapport à la charge est plus éloignée dans l'invention par rapport à l'art antérieur, cela permet de rendre le préhenseur plus tolérant aux sollicitations engendrées par les applications sévères des procédés de ferrage et élimine les casses inopinées. Le préhenseur est plus solide tout en conservant une fonction fusible de protection.
- Optionnellement, la pièce fusible est réalisée en un alliage d'aluminium de type 7075. L'emploi de ce matériau est avantageux en ce qu'il est plus cassant que l'acier dont est confectionnée la pièce de support du porte-outil. Aussi, lorsque la limite élastique est atteinte, la pièce fusible cassera brutalement sans passer par une phase de déformation permanente difficilement détectable.
- Selon un second aspect, l'invention a pour objet un procédé de montage d'un préhenseur selon le premier aspect, le procédé étant remarquable en ce qu'il comprend une étape de montage d'une pièce de support d'un porte-outil sur une pièce fusible montrant au moins une zone de résistance mécanique amoindrie de manière à se rompre sous l'application d'une force supérieure à un seuil donné.
- Selon une mise en oeuvre préférée, la pièce de support montrant un pied d'ancrage et la pièce fusible étant tubulaire, ladite étape de montage comprend l'emmanchement dudit pied d'ancrage dans ladite pièce fusible. De préférence, la pièce de support est enfoncée dans la pièce fusible jusqu'à ce que le pied d'ancrage vienne se placer en butée contre la surface interne de l'épaulement. Avantageusement, la fixation est effectuée par la mise en place d'une goupille après contre-perçage du pied d'ancrage.
- Selon une mise en oeuvre préférée, le procédé comprend en outre une étape de montage d'une pièce fusible sur un corps creux porté par l'embase ou formé par une coulisse montée sur ladite embase. De préférence, la pièce fusible est enfoncée dans le corps creux jusqu'à ce que l'extrémité du corps creux se place en butée contre la surface externe de l'épaulement. Avantageusement, la fixation est effectuée par la mise en place d'une goupille après contre-perçage de la pièce fusible.
- L'invention sera bien comprise et d'autres aspects et avantages apparaîtront clairement à la lecture de la description qui suit, donnée à titre d'exemple en référence aux planches de dessins sur lesquelles :
- La
figure 1 est une vue d'un système de préhension selon l'art antérieur. - La
figure 2 est une vue d'un préhenseur selon l'invention. - La
figure 3 est une vue d'un moyen de support selon l'invention. - La
figure 4 est une vue d'une pièce fusible selon l'invention. - La
figure 5 est une vue en coupe d'un moyen de support selon l'invention. - Dans la description qui suit le terme « comprendre » est synonyme de « inclure » est n'est pas limitatif en ce qui concerne la présence d'autres éléments dans le préhenseur ou d'autres étapes dans le procédé auquel il se rapporte. Il est entendu que le terme « comprendre » inclut les termes « consister en ». Sur les différentes figures, les mêmes références désignent des éléments identiques ou similaires.
- La
figure 1 ayant été commentée en partie introductive, on se référera à présent à lafigure 2 illustrant un préhenseur 13 selon l'invention. Le procédé de montage (ou de réparation) du préhenseur et le préhenseur en tant que tels seront décrits conjointement. Le préhenseur 13 comprend une structure générale similaire à celle de l'art antérieur avec au moins une poutre 3 de structure, au moins un outil 7 de préhension et au moins un moyen de support 11 d'un outil 7 de préhension. La ou les poutres 3 de structure sont préférentiellement constituées d'un profilé en acier se présentant, par exemple, sous une forme de tube ou de barre. La ou les poutres 3 montrent avantageusement un profil circulaire afin de faciliter le réglage de la position du ou des bras sur la poutre concernée. - Selon l'invention, le préhenseur 13 peut comprendre une poutre 3 de structure centrale, mais il est envisageable qu'il comporte deux poutres parallèles et solidaires l'une de l'autre au moyen notamment d'une ou plusieurs entretoises. Une architecture à plusieurs poutres est avantageuse pour la préhension de pièces de carrosserie de poids élevé. La ou les poutres 3 de structure s'entendent selon une direction principale et le ou les moyens de support 11 s'étendent généralement selon une direction non parallèle à ladite direction principale, généralement orthogonale à celle-ci.
- Idéalement, et de manière connue, le préhenseur 13 comprend également une interface de fixation 5 à une main de robot de manipulation montée généralement de manière fixe sur la ou les poutres de support 3. De manière connue, l'interface de fixation 5 comprend une platine de fixation et un dispositif de fixation de ladite platine à la ou aux poutres 3 de support. Avantageusement, l'interface de fixation 5 est montée en partie centrale de la ou des poutres 3 de support.
- Le préhenseur 13 selon l'invention va présenter de manière connue au moins un, de préférence au moins deux et plus préférentiellement au moins trois outils 7 de préhension conçus pour la préhension d'une pièce de carrosserie 9. Les outils 7 de préhension comprennent un moyen de serrage de la pièce de carrosserie 9, notamment de type pince et/ou au moins une ventouse. Les pinces peuvent être de type mécanique et se présenter sous une forme de pince de serrage avec une mâchoire de serrage. Eventuellement, elles peuvent être de type électromagnétique. Les outils peuvent aussi comprendre ou se présenter sous forme d'une ou plusieurs ventouses de maintien. L'homme du métier pourra envisager l'emploi d'autres outils de préhension.
- Chaque outil 7 de préhension est monté sur la poutre par un moyen de support 11 illustré en
figure 3 et comprenant un bras 15 au bout duquel est fixé un porte-outil 17. Selon l'invention, le bras 15 comprend une embase 19 de fixation à une poutre de structure (non représentée enfigure 3 ) et une pièce de support 21 du porte-outil 17. Le préhenseur selon l'invention est remarquable en ce que le bras 15 comprend en outre une pièce fusible 23 montrant au moins une zone avec une résistance mécanique diminuée de manière à se rompre sous l'application d'une force supérieure à un seuil donné, ladite pièce fusible 23 étant agencée entre la pièce de support 21 du porte-outil 17 et l'embase 19. - Selon un mode de réalisation préféré de l'invention, l'embase 19 comporte un étrier constitué d'une bride semi-annulaire 25 et d'une contre-bride semi-annulaire (visible en
figure 5 ) montées serrées autour de la poutre concernée, ledit étrier étant réglable en coulissement et en rotation sur ladite poutre avant serrage de la contre-bride sur la bride. Le préhenseur offre donc deux premières possibilités de réglage de la position de l'outil de préhension. - Selon un mode de réalisation de l'invention, l'embase 19 comprend en outre un corps creux 27 tubulaire faisant saillie de la bride 25 et dans lequel est montée la pièce fusible 23. La pièce fusible 23 peut être montée réglable en coulissement. De manière alternative, une coulisse est montée réglable en coulissement sur le corps creux de ladite embase. Cette architecture est intéressante en ce qu'elle permet de former un bras 15 télescopique réglable en longueur. Selon une mise en oeuvre préférée de l'invention, le réglage se fait en sélectionnant une embase 19 dont le corps creux 27 montre une longueur adéquate et le montage de la pièce fusible 23 se fait selon une position standard à l'extrémité libre dudit corps creux 27. La possibilité de variation de la longueur du ou des bras 15 est une troisième possibilité de réglage de la position du ou des outils 7 de préhension. La position de la pièce fusible 23 peut être fixée par vissage, éventuellement avec une goupille de maintien en position.
- La pièce fusible 23 est configurée pour faire la liaison entre la pièce de support 21 du porte-outil et l'embase 19 ou entre la pièce de support du porte-outil et une coulisse montée sur l'embase. C'est une pièce de raccordement pouvant se présenter sous forme d'une barre. Préférentiellement, comme illustré en
figure 4 , la pièce fusible 23 est une pièce de raccordement montrant deux extrémités (29, 31) et se présentant sous une forme de manchon et montre donc une structure creuse de type tubulaire. La pièce fusible 23 se place sur ou dans le corps creux 27 ou la coulisse par une de ses extrémités 29 et collabore avec une pièce de support 21 du porte-outil 17 au moyen de son autre extrémité 31. - Selon un mode de réalisation préféré, au moins une pièce fusible est une pièce tubulaire présentant deux extrémités (29, 31) et un épaulement 33 sur sa longueur de manière à ce qu'une des extrémités 31 montre un diamètre supérieur au diamètre montré par l'autre extrémité 29. Dans notre exemple de réalisation, et de préférence, l'extrémité 31 de plus grand diamètre est destinée à coopérer avec la pièce de support 21 du porte-outil. Cette configuration offre deux avantages : d'une part, elle permet d'utiliser une pièce de support 21 du porte-outil qui comprend un pied d'ancrage 37 de section pleine, donc plus solide, ce qui favorise la rupture au niveau de la pièce fusible 23 et non pas de la pièce de support 21 du porte-outil. D'autre part, cela permet d'utiliser une pièce de support 21 du porte-outil dont le pied d'ancrage 37 a un diamètre plus important que dans l'art antérieur, donc plus solide également.
- Selon une mise en oeuvre préférée de l'invention, au moins une pièce fusible 23 montre une zone 35 de résistance mécanique amoindrie (visible en
figure 5 ) agencée à la base de l'épaulement 33 sur la partie de la pièce de plus petit diamètre. Par exemple, la zone 35 de résistance mécanique amoindrie d'au moins une pièce fusible est une zone montrant une épaisseur réduite par rapport à l'épaisseur montrée par le reste du corps de ladite pièce fusible 23. Lorsque la pièce est tubulaire, l'épaisseur s'entend comme étant la différence entre le diamètre intérieur et le diamètre extérieur dudit tube. Cette zone ou section d'épaisseur réduite peut être obtenue par usinage de la surface extérieure dudit tube. - L'un des avantages de l'invention est qu'il est possible que la pièce fusible 23 soit une pièce ne montrant aucune fonction de réglage de manière à ce que son remplacement soit le plus rapide possible, les fonctions de réglage étant portées par d'autres pièces. A cet effet, l'épaulement 33 montré par la pièce fusible 23 joue un rôle puisqu'il permet un positionnement standard et répétable de la pièce fusible 23 par rapport à l'embase 19 ou la coulisse d'une part et/ou par rapport à la pièce de support 21 du porte-outil.
- Ainsi, selon un mode de réalisation préféré de l'invention, au moins une pièce fusible 23 est insérée par son extrémité 29 de plus petit diamètre dans un corps creux 27 présenté par une embase 19 ou dans un corps creux formé par une coulisse. De manière optionnelle, la pièce fusible 23 est insérée dans le corps creux 27 jusqu'à ce que l'extrémité du corps creux vienne se placer en butée contre la surface externe de l'épaulement 33. Une fois insérée dans le corps creux, la position de la pièce de support 21 est fixée, par exemple, par vissage d'au moins une vis 43 (visible en
figure 5 ) et par au moins une goupille 41 additionnelle. - De manière complémentaire ou alternative, au moins une pièce de support du porte-outil comprend un pied d'ancrage inséré dans une pièce fusible ; de préférence jusqu'à ce que le pied d'ancrage se place en butée contre la surface interne de l'épaulement.
- Selon l'invention, la position du porte-outil 17 sur le bras 15 peut être réglée selon une quatrième possibilité de réglage de la position de l'outil, à savoir par un réglage en rotation de l'outil. A cet effet, le porte-outil comprendra avantageusement une rotule 39 destinée à coopérer avec des moyens complémentaires, tels qu'une cavité hémisphérique, portés par le porte-outil 17. Avantageusement, au moins une pièce de support 21 du porte-outil comprend une rotule 39 pour la fixation du porte-outil 17 et l'extrémité libre du pied d'ancrage 37 est disposée à au moins 8 cm du centre de la rotule 39 ; de préférence à au moins 10 cm. Cette disposition est avantageuse par l'effet levier qu'elle procure. La zone de résistance mécanique amoindrie 35, ou zone fusible, est en effet décalée par rapport au centre de la rotule 39 par rapport à la configuration connue dans l'art antérieur, ce qui permet de soulever des masses plus importantes. En effet, dans l'art antérieur, la zone fusible se trouvait à la base de la rotule.
- De manière optionnelle, et avec l'objectif de favoriser sa rupture sous l'action d'une force supérieure à un seuil donné, la pièce fusible 23 n'est pas réalisée en acier, mais en un alliage d'aluminium de type 7075. Ce type d'alliage à base de zinc est connu et commercialement disponible. Il compte environ 5,6 à 6,1 % de zinc, 2,1-2,5 % de magnésium, de 1,2 à 1,6 % de cuivre, et moins de 0,5 % de silicium, fer, manganèse, titane, chrome et autres métaux. Il est notamment commercialisé sous la marque Fortal.
Claims (10)
- Préhenseur (13) comprenant au moins une poutre (3) de structure, au moins un outil de préhension (7) et au moins un moyen de support (11) d'un outil de préhension (7), ledit moyen de support (11) comprenant un bras (15) au bout duquel est monté un porte-outil (17), le bras (15) comprenant une embase (19) de fixation à une poutre (3) de structure et une pièce de support (21) du porte-outil, le préhenseur (13) étant caractérisé en ce que le bras (15) comprend en outre une pièce fusible (23) montrant au moins une zone (35) de résistance mécanique amoindrie de manière à se rompre sous l'application d'une force supérieure à un seuil donné, ladite pièce fusible (23) étant agencée entre la pièce de support (21) du porte-outil et l'embase (19).
- Préhenseur (13) selon la revendication 1, caractérisé en ce qu'au moins une pièce fusible (23) se présente sous une forme de manchon de raccordement configuré pour faire la liaison entre la pièce de support (21) du porte-outil et l'embase (19) ou entre la pièce de support (21) du porte-outil et une coulisse montée sur l'embase (19).
- Préhenseur (13) selon la revendication 1 ou 2, caractérisé en ce qu'au moins une pièce fusible (23) est une pièce tubulaire qui présente deux extrémités (29 ; 31) et un épaulement (33) sur sa longueur de manière à ce qu'une des extrémités (31) montre un diamètre supérieur au diamètre montré par l'autre extrémité (29) ; de préférence l'extrémité (31) de plus grand diamètre est destinée à coopérer avec la pièce de support (21) du porte-outil.
- Préhenseur (13) selon la revendication 3, caractérisé en ce qu'au moins une pièce fusible (23) montre une zone (35) de résistance mécanique amoindrie agencée à la base de l'épaulement (33).
- Préhenseur (13) selon la revendication 3 ou 4, caractérisé en ce que :- au moins une pièce fusible (23) est insérée par son extrémité (29) de plus petit diamètre dans un corps creux (27) présenté par une embase (19) ou dans un corps creux formé par une coulisse ; de préférence, la pièce fusible (23) est insérée dans le corps creux (27) jusqu'à ce que l'extrémité du corps creux (27) vienne se placer en butée contre la surface externe de l'épaulement (33); et/ou- au moins une pièce de support (21) du porte-outil comprend un pied d'ancrage (37) inséré dans une pièce fusible (23) ; de préférence jusqu'à ce que le pied d'ancrage (37) se place en butée contre la surface interne de l'épaulement (33).
- Préhenseur (13) selon l'une des revendications 1 à 5, la ou les pièces fusibles (23) montrant un corps, le préhenseur (13) est caractérisé en ce que la zone (35) de résistance mécanique amoindrie d'au moins une pièce fusible (23) est une zone (35) montrant une épaisseur réduite par rapport à l'épaisseur montrée par le reste du corps de ladite pièce fusible (23).
- Préhenseur (13) selon l'une des revendications 1 à 6, caractérisé en ce qu'au moins un bras (15) est un bras télescopique comprenant une embase (19) et une coulisse montée réglable en coulissement sur ladite embase (19).
- Préhenseur (13) selon l'une des revendications 1 à 7, la pièce de support (21) du porte-outil comprend un pied d'ancrage (37) montrant une extrémité libre, le préhenseur (13) étant caractérisé en ce que la pièce de support (21) du porte-outil comprend un pied d'ancrage (37) de section pleine et/ou en ce que la pièce de support (21) du porte-outil comprend une rotule (39) pour la fixation du porte-outil (17) et l'extrémité libre du pied d'ancrage (37) est disposée à au moins 8 cm du centre de la rotule (39) ; de préférence à au moins 10 cm.
- Préhenseur (13) selon l'une des revendications 1 à 8 caractérisé en ce que la pièce fusible (23) est réalisée en un alliage d'aluminium de type 7075.
- Procédé de montage d'un préhenseur (13) selon l'une des revendications 1 à 9, caractérisé en ce qu'il comprend une étape de montage d'une pièce de support (21) d'un porte-outil sur une pièce fusible (23) montrant au moins une zone (35) de résistance mécanique amoindrie de manière à se rompre sous l'application d'une force supérieure à un seuil donné ; de préférence la pièce de support (21) montrant un pied d'ancrage (37) et la pièce fusible (23) étant tubulaire, ladite étape de montage comprend l'emmanchement dudit pied d'ancrage (37) dans ladite pièce fusible (23).
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| FR1858305A FR3085877B1 (fr) | 2018-09-14 | 2018-09-14 | Prehenseur modulaire pour piece de carrosserie de vehicule |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| EP3636400A1 true EP3636400A1 (fr) | 2020-04-15 |
| EP3636400B1 EP3636400B1 (fr) | 2022-11-30 |
Family
ID=65201450
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP19194123.6A Active EP3636400B1 (fr) | 2018-09-14 | 2019-08-28 | Prehenseur modulaire pour piece de carrosserie de vehicule |
Country Status (3)
| Country | Link |
|---|---|
| EP (1) | EP3636400B1 (fr) |
| FR (1) | FR3085877B1 (fr) |
| MA (1) | MA47032A (fr) |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS6076987A (ja) * | 1983-10-01 | 1985-05-01 | フアナツク株式会社 | 工業用ロボツトの安全継手 |
| JPS6229295U (fr) * | 1985-08-02 | 1987-02-21 | ||
| JPS6360590U (fr) * | 1986-10-08 | 1988-04-22 | ||
| WO2006123296A2 (fr) * | 2005-05-17 | 2006-11-23 | O.L.C.I. Engineering S.R.L. | Bati de support destine a un element prehenseur d'un robot manipulateur |
| FR2972702A1 (fr) | 2011-03-14 | 2012-09-21 | Peugeot Citroen Automobiles Sa | Systeme de prehension modulaire pour piece de carrosserie de vehicule |
-
2018
- 2018-09-14 FR FR1858305A patent/FR3085877B1/fr active Active
-
2019
- 2019-08-28 MA MA047032A patent/MA47032A/fr unknown
- 2019-08-28 EP EP19194123.6A patent/EP3636400B1/fr active Active
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS6076987A (ja) * | 1983-10-01 | 1985-05-01 | フアナツク株式会社 | 工業用ロボツトの安全継手 |
| JPS6229295U (fr) * | 1985-08-02 | 1987-02-21 | ||
| JPS6360590U (fr) * | 1986-10-08 | 1988-04-22 | ||
| WO2006123296A2 (fr) * | 2005-05-17 | 2006-11-23 | O.L.C.I. Engineering S.R.L. | Bati de support destine a un element prehenseur d'un robot manipulateur |
| FR2972702A1 (fr) | 2011-03-14 | 2012-09-21 | Peugeot Citroen Automobiles Sa | Systeme de prehension modulaire pour piece de carrosserie de vehicule |
Also Published As
| Publication number | Publication date |
|---|---|
| FR3085877B1 (fr) | 2021-12-17 |
| MA47032A (fr) | 2020-11-11 |
| FR3085877A1 (fr) | 2020-03-20 |
| EP3636400B1 (fr) | 2022-11-30 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP2686225B1 (fr) | Systeme de prehension modulaire pour piece de carrosserie de vehicule | |
| EP3164245B1 (fr) | Dispositif de serrage de pieces destinees a etre assemblees | |
| FR2896727A1 (fr) | Fixation pour un anneau de remorquage | |
| EP1630333B1 (fr) | Charnière à réglage angulaire | |
| EP3636400B1 (fr) | Prehenseur modulaire pour piece de carrosserie de vehicule | |
| EP2086772B1 (fr) | Assemblage d'un essieu arrière de véhicule | |
| EP1588897B1 (fr) | Elément de fixation et véhicule correspondant | |
| EP3412522B1 (fr) | Dispositif de maintien d'une timonerie d'un mécanisme d essuyage, palier d'une timonerie, sous-ensemble de timonerie et timonerie associés, et procédé de mise en place d'un dispositif de maintien sur une timonerie | |
| EP1778422B1 (fr) | Outil de sertissage | |
| FR3080302A1 (fr) | Centrage d’une buse d’extrusion au moyen d’un pion fixe | |
| FR2816272A1 (fr) | Face avant avec bouclier pour vehicule automobile | |
| FR3020289A1 (fr) | Procede d'assemblage d'un ensemble comprenant un tube a une plaque et ensemble ainsi assemble | |
| EP1721795B1 (fr) | Dispositif et procédé de fixation d'un mécanisme d'essuie-vitre sur une partie de caisse de véhicule, et véhicule automobile équipé d'un tel dispositif | |
| EP3715259B1 (fr) | Ensemble pour un aéronef, l'ensemble comportant un mât, une attache moteur et un système de fixation entre le mât et l'attache moteur | |
| FR2901853A1 (fr) | Systeme de liaison mecanique vissee entre deux pieces et siege d'automobile comportant de tels systemes. | |
| EP1270962B1 (fr) | Dispositif de liaison mécanique sécurisé | |
| EP3299650A1 (fr) | Procédé pour équiper l'extrémité d'un tube fin d'une butée réglable par vissage | |
| EP3668733B1 (fr) | Procédé de fabrication de traverses de véhicules automobiles avec barre de guidage transversal | |
| FR2889269A1 (fr) | Goupille de liaison et procede de fabrication | |
| FR3040903A1 (fr) | Dispositif de mise en maintien en position d’une piece | |
| FR2834660A1 (fr) | Compresseur de ressorts de suspension de vehicule automobile | |
| FR2882326A1 (fr) | Berceau de vehicule automobile du type comprenant deux coquilles dont l'une au moins est pourvue de moyens de reception de moyens de fixation d'un element, et vehicule correspondant | |
| FR2913394A1 (fr) | Systeme de fixation d'une charniere sur un ouvrant de vehicule automobile. | |
| FR3139524A1 (fr) | Dispositif pour l’assemblage d’un PARECHOC ARRIÈRE de VÉHICULE AUTOMOBILE | |
| WO2019077224A1 (fr) | Dispositif d'écartement d'un élément ouvrant par rapport à un élément fixe, notamment d'un véhicule automobile |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: THE APPLICATION HAS BEEN PUBLISHED |
|
| AK | Designated contracting states |
Kind code of ref document: A1 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| AX | Request for extension of the european patent |
Extension state: BA ME |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: REQUEST FOR EXAMINATION WAS MADE |
|
| 17P | Request for examination filed |
Effective date: 20201006 |
|
| RAP1 | Party data changed (applicant data changed or rights of an application transferred) |
Owner name: PSA AUTOMOBILES SA |
|
| RBV | Designated contracting states (corrected) |
Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| GRAP | Despatch of communication of intention to grant a patent |
Free format text: ORIGINAL CODE: EPIDOSNIGR1 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: GRANT OF PATENT IS INTENDED |
|
| INTG | Intention to grant announced |
Effective date: 20220711 |
|
| GRAS | Grant fee paid |
Free format text: ORIGINAL CODE: EPIDOSNIGR3 |
|
| GRAA | (expected) grant |
Free format text: ORIGINAL CODE: 0009210 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: THE PATENT HAS BEEN GRANTED |
|
| AK | Designated contracting states |
Kind code of ref document: B1 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: EP Ref country code: GB Ref legal event code: FG4D Free format text: NOT ENGLISH |
|
| REG | Reference to a national code |
Ref country code: AT Ref legal event code: REF Ref document number: 1534335 Country of ref document: AT Kind code of ref document: T Effective date: 20221215 Ref country code: DE Ref legal event code: R096 Ref document number: 602019022452 Country of ref document: DE |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R084 Ref document number: 602019022452 Country of ref document: DE |
|
| REG | Reference to a national code |
Ref country code: IE Ref legal event code: FG4D Free format text: LANGUAGE OF EP DOCUMENT: FRENCH |
|
| REG | Reference to a national code |
Ref country code: GB Ref legal event code: 746 Effective date: 20230109 |
|
| REG | Reference to a national code |
Ref country code: LT Ref legal event code: MG9D |
|
| REG | Reference to a national code |
Ref country code: NL Ref legal event code: MP Effective date: 20221130 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20221130 Ref country code: PT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20230331 Ref country code: NO Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20230228 Ref country code: LT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20221130 Ref country code: FI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20221130 Ref country code: ES Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20221130 |
|
| REG | Reference to a national code |
Ref country code: AT Ref legal event code: MK05 Ref document number: 1534335 Country of ref document: AT Kind code of ref document: T Effective date: 20221130 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: RS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20221130 Ref country code: PL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20221130 Ref country code: LV Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20221130 Ref country code: IS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20230330 Ref country code: HR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20221130 Ref country code: GR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20230301 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: NL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20221130 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SM Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20221130 Ref country code: RO Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20221130 Ref country code: EE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20221130 Ref country code: DK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20221130 Ref country code: CZ Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20221130 Ref country code: AT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20221130 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20221130 Ref country code: AL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20221130 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R097 Ref document number: 602019022452 Country of ref document: DE |
|
| PLBE | No opposition filed within time limit |
Free format text: ORIGINAL CODE: 0009261 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: NO OPPOSITION FILED WITHIN TIME LIMIT |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: GB Payment date: 20230720 Year of fee payment: 5 |
|
| 26N | No opposition filed |
Effective date: 20230831 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20221130 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: FR Payment date: 20230720 Year of fee payment: 5 Ref country code: DE Payment date: 20230720 Year of fee payment: 5 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MC Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20221130 |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: PL |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MC Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20221130 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R081 Ref document number: 602019022452 Country of ref document: DE Owner name: STELLANTIS AUTO SAS, FR Free format text: FORMER OWNER: PSA AUTOMOBILES SA, POISSY, FR |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: LU Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20230828 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: LU Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20230828 Ref country code: CH Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20230831 |
|
| REG | Reference to a national code |
Ref country code: BE Ref legal event code: MM Effective date: 20230831 |
|
| REG | Reference to a national code |
Ref country code: IE Ref legal event code: MM4A |