EP3552978A1 - Plant and method for laying bottles in a tête-bêche arrangement - Google Patents
Plant and method for laying bottles in a tête-bêche arrangement Download PDFInfo
- Publication number
- EP3552978A1 EP3552978A1 EP19167965.3A EP19167965A EP3552978A1 EP 3552978 A1 EP3552978 A1 EP 3552978A1 EP 19167965 A EP19167965 A EP 19167965A EP 3552978 A1 EP3552978 A1 EP 3552978A1
- Authority
- EP
- European Patent Office
- Prior art keywords
- bottle
- bottles
- bêche
- tête
- laying
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 238000000034 method Methods 0.000 title claims description 14
- 230000000694 effects Effects 0.000 description 9
- 238000012856 packing Methods 0.000 description 7
- 238000012546 transfer Methods 0.000 description 6
- 235000014101 wine Nutrition 0.000 description 4
- 238000000926 separation method Methods 0.000 description 3
- 230000004888 barrier function Effects 0.000 description 2
- 239000007788 liquid Substances 0.000 description 2
- 230000003068 static effect Effects 0.000 description 2
- 238000010276 construction Methods 0.000 description 1
- 239000007799 cork Substances 0.000 description 1
- 230000008878 coupling Effects 0.000 description 1
- 238000010168 coupling process Methods 0.000 description 1
- 238000005859 coupling reaction Methods 0.000 description 1
- 238000013461 design Methods 0.000 description 1
- 239000011521 glass Substances 0.000 description 1
- 238000012423 maintenance Methods 0.000 description 1
- 239000000463 material Substances 0.000 description 1
- 238000004806 packaging method and process Methods 0.000 description 1
- 235000015040 sparkling wine Nutrition 0.000 description 1
- 238000013519 translation Methods 0.000 description 1
- 238000011144 upstream manufacturing Methods 0.000 description 1
Images













Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65B—MACHINES, APPARATUS OR DEVICES FOR, OR METHODS OF, PACKAGING ARTICLES OR MATERIALS; UNPACKING
- B65B21/00—Packaging or unpacking of bottles
- B65B21/02—Packaging or unpacking of bottles in or from preformed containers, e.g. crates
- B65B21/025—Packaging or unpacking of bottles in or from preformed containers, e.g. crates the bottles being arranged in a head-to-bottom formation
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65B—MACHINES, APPARATUS OR DEVICES FOR, OR METHODS OF, PACKAGING ARTICLES OR MATERIALS; UNPACKING
- B65B21/00—Packaging or unpacking of bottles
- B65B21/02—Packaging or unpacking of bottles in or from preformed containers, e.g. crates
- B65B21/14—Introducing or removing groups of bottles, for filling or emptying containers in one operation
- B65B21/18—Introducing or removing groups of bottles, for filling or emptying containers in one operation using grippers engaging bottles, e.g. bottle necks
- B65B21/20—Introducing or removing groups of bottles, for filling or emptying containers in one operation using grippers engaging bottles, e.g. bottle necks with means for varying spacing of bottles
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65B—MACHINES, APPARATUS OR DEVICES FOR, OR METHODS OF, PACKAGING ARTICLES OR MATERIALS; UNPACKING
- B65B35/00—Supplying, feeding, arranging or orientating articles to be packaged
- B65B35/56—Orientating, i.e. changing the attitude of, articles, e.g. of non-uniform cross-section
- B65B35/58—Turning articles by positively-acting means, e.g. to present labelled portions in uppermost position
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65B—MACHINES, APPARATUS OR DEVICES FOR, OR METHODS OF, PACKAGING ARTICLES OR MATERIALS; UNPACKING
- B65B59/00—Arrangements to enable machines to handle articles of different sizes, to produce packages of different sizes, to vary the contents of packages, to handle different types of packaging material, or to give access for cleaning or maintenance purposes
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65B—MACHINES, APPARATUS OR DEVICES FOR, OR METHODS OF, PACKAGING ARTICLES OR MATERIALS; UNPACKING
- B65B59/00—Arrangements to enable machines to handle articles of different sizes, to produce packages of different sizes, to vary the contents of packages, to handle different types of packaging material, or to give access for cleaning or maintenance purposes
- B65B59/001—Arrangements to enable adjustments related to the product to be packaged
Definitions
- the object of the present invention is a plant and a method for laying bottles in ativ-bêche (head-to-tail) arrangement.
- Bottom means in particular a container for liquids, mostly made of glass, of any shape, in particular of a cylindrical shape which narrows upwards into the so-called neck.
- plant for laying bottles in aroy-bêche arrangement means a plant suitable to lay bottles within a container.
- a container may be destined for packing bottles, and be constituted for example by a box or crate, or be a container for the temporary storage of bottles, intended to be subsequently transferred.
- the plant and the method according to the invention are applicable to laying bottles containing wine or sparkling wine, but may be applied to laying bottles containing any type of liquid, food and non-food.
- a “tête-bêche” (head-to-tail) arrangement is generally understood to mean the arrangement of two things of the same kind, so that the upper part of one is facing or alongside the lower part of the other.
- arranging bottles in a “tête-bêche” manner means arranging the bottles side by side to each other horizontally, alternately reversing the neck-bottom orientation, as shown in Figure 1 where some bottles B are shown arranged inside a box S.
- laying systems with a gripper device mounted on a Cartesian axis movement structure are used.
- a movable gripper device is in turn equipped with a plurality of mechanical clamps suitable to grip the bottles by the neck. These mechanical clamps, placed side by side to each other, are rotatable in parallel planes.
- the movable gripper device is carried on a bottle conveyor line to receive the bottles in a vertical position.
- Each mechanical clamp grips a bottle arranged vertically by the neck.
- the movable gripper device lifts the mechanical clamp with the attached bottles. During lifting, each mechanical clamp is rotated so that the relative bottle is brought into a horizontal position.
- Each clamp is configured to impart on the relative bottle a movement of rotation in the direction opposite to the adjacent clamps.
- the bottles are arranged horizontally in ativ-bêche arrangement.
- the movable gripper device may transport the bottles in a laying line into containers and lay in one or more containers (e.g. boxes/packing crates) the bottles already in thetiv-bêche arrangement.
- FIG. 2 An example of a bottle laying plant described above is shown in Figure 2 , where A indicates the movable gripper device, E the single, orientable mechanical clamp, C the bottle transport line and D the line for laying in containers.
- a first limitation is linked to the constructive complexity of the movable gripper device.
- Such device must, in effect, be able to carry out all the steps of handling and laying the bottles: from gripping the bottles to laying them in the box.
- Such mechanical complexity increases the cost and weight of the same movable device.
- each movable gripper device is configured to act specifically on only one specific bottle format.
- One of the main parameters that identify a bottle format for the purpose of handling a bottle is the cross section of the bottle body, identifiable by its maximum dimension, which in particular corresponds to the maximum bottle diameter in the case of a substantially circular cross section.
- the fact that the movable gripper device is configured for a specific bottle format has a negative effect on the operative flexibility of the laying plant. In effect, when changing the bottle format, it is necessary to replace the movable gripper device, resulting in machine stops and operator interventions.
- the creation of a gripper device capable of adapting to bottle format changes would, in effect, impart further constructive complications, which would be excessively onerous in terms of increasing the cost and weight of the movable device.
- the weight of the gripper device complicates replacement operations if this becomes necessary, for example, for changing the bottle format or for maintenance.
- the use of the aforesaid gripper device extends the operating cycle times of the laying plant.
- the laying plant remains in effect in stand-by during the execution of each single cycle of operations of gripping, rotating and laying the bottles. This leads to the introduction of long downtimes.
- the object of the present invention is to eliminate all or part of the drawbacks of the prior art mentioned above, by providing a plant for laying bottles in ativ-bêche arrangement which allows bottle format changes to be flexibly managed, significantly reducing the need to replace the movable gripper device, without however leading to an increase in the mechanical complexity of the movable gripper device.
- a further object of the present invention is to provide a plant for laying bottles in ativ-bêche arrangement that is easily manageable from an operative point of view.
- a further object of the present invention is to provide a plant for laying bottles in ativ-bêche arrangement that is simple and economical to implement.
- the plant 1 for laying bottles in ativ-bêche arrangement according to the invention is generally suitable to lay bottles inside a container.
- a container may be destined for packing bottles, and be constituted for example by a box or crate, or be a container for the temporary storage of bottles, intended to be subsequently transferred.
- the plant for laying bottles in ativ-bêche arrangement 1 comprises:
- the bottle positioning system 30 is structurally and functionally distinct from the bottle transferring device 40.
- the movable device for gripping bottles present in the solutions of the prior art has been divided into two distinct systems/devices, i.e. the bottle positioning system 30 and the bottle transferring device 40.
- the bottle handling operations necessary to lay the bottles in ativ-bêche configuration are completely separate and distinct from the operations of transferring the bottles into the laying line. Handling operations and transfer operations are in effect carried out by operatively separate and autonomous systems/devices.
- the bottle positioning system 30 may thus be structured and sized in such a way as to carry out only the operations aimed at laying the bottles in aroy-bêche configuration, since the execution of the operations of transferring these bottles to the laying line 20 is completely entrusted to the bottle transferring device 40.
- the bottle transferring device 40 may be structured and sized in such a way as to perform only the operations of transferring bottles (already in thenius-bêche configuration) to the laying line 20, since the execution of the operations aimed at laying bottles in the27-bêche configuration is completely entrusted to the aforementioned positioning system 30.
- a first advantage of such an operative separation is that it is possible to simplify the mechanical structure of the bottle transferring device 40, since it is no longer required for this device to impart the relative rotation movements among the bottles handled thereby.
- the bottle transferring device 40 is called to engage in gripping groups of bottles already arranged in thenius-bêche configuration. Once the bottles have been engaged, the bottle transferring device 40 may be limited to transferring them in bulk to the laying line 20 in containers. At most, the transfer device 40 may be configured to separate (divide) two distinct groups of bottles by means of a simple relative movement of translation.
- the transfer device 40 does not have to impart relative rotation movements among the bottles, it is possible to structure this device 40 in such a way that it may be adapted to different bottle formats (in particular, according to the maximum size/diameter of the bottle), for example by equipping it with means suitable to vary the distance provided between the components for gripping the bottles. It is also possible to use - as bottle grippers - vacuum suction cups instead of more complex mechanical clamps.
- the bottle transferring device 40 is not required to change the relative orientation of the bottles in order to lay them in ativ-bêche configuration, but rather only to transfer bottles already arranged in this configuration from one point of the plant 1 to another, it is possible to significantly simplify the relative support and movement structure.
- a support and movement structure it is possible to adopt a robotic arm, instead of a more cumbersome system of Cartesian axes.
- a second advantage of the aforesaid operative separation is that it is also possible to simplify the mechanical structure of the system 30 for positioning bottles in ativ-bêche configuration.
- the bottle positioning system 30 is no longer required to orient bottles in ativ-bêche configuration operating suspended in the air and in movement, but rather it may carry out such manipulations operating in a "static" configuration, i.e. without requiring the system 30 as a whole to move with respect to the relative support structure.
- This makes it possible to structure this system 30 in such a way that it may be adapted to different bottle formats, for example by equipping it with means suitable to vary the distance provided between the components for handling the bottles.
- the fact that the handling of the bottles in thetiv-bêche configuration is not linked to transferring also makes it possible to use - as bottle gripping elements - vacuum suction cups instead of more complex mechanical clamps.
- the laying plant 1 may be structured to flexibly manage bottle format changes, significantly reducing the need to replace the movable device for gripping and handling bottles, without, however, increasing the mechanical complexity of the bottle transferring device.
- a third advantage of the aforesaid operative separation is that it is possible to reduce downtime in the operative cycle of the laying plant. In effect, as will be explained below, the operations of positioning bottles intiv-bêche configuration may continue even at the same time as transferring bottles into the laying line.
- the line 20 for laying in containers is suitable for presenting in sequence the containers within which the bottles are to be laid in aroy-bêche arrangement.
- the containers may be packing containers (such as boxes or crates) or temporary containers.
- the laying line 20 in the plant 1 may be completely traditional and is therefore well known to a person skilled in the art. It will therefore not be described in detail.
- the line 20 for laying in containers has been illustrated as a bottle packaging line. This illustration should be understood as purely illustrative and non-limiting.
- the aforesaid system 30 for positioning bottles in ativ-bêche configuration is associated to the device 10 for receiving bottles.
- the aforesaid bottle transferring device 40 comprises:
- the aforesaid movement means consist of a robotic arm 45.
- the aforesaid movement means are made up of a system of Cartesian axes.
- the aforesaid system 30 for positioning bottles in ativ-bêche configuration may be structurally integrated into the bottle receiving device 10.
- the bottle positioning system 30 since it does not perform the function of transferring bottles to the laying line - does not require a dedicated support structure, which is sized to withstand the vibrations and stresses generated by the movement of large weights suspended in the air. Therefore, the bottle positioning system 30 may use the support structure of other parts of the plant, in particular of the bottle receiving device 10.
- this support structure may be constituted by a support frame (such as a framework with a plurality of support legs on the ground) that defines a horizontal support surface on the top thereof.
- a support frame such as a framework with a plurality of support legs on the ground
- the aforesaid device 10 for receiving bottles comprises:
- the aforesaid system 30 for positioning bottles in thet-bêche configuration is positioned in the free space 17 between the aforesaid two bottle storage lanes 11, 12 and is suitable to act on bottles in said two storage lanes 11, 12.
- the bottles arrive in the proximity of the positioning system 30, already arranged so as to be able to be picked up. This avoids therefore the need to move the bottle positioning system towards the bottles.
- the bottle receiving device 10 comprises upstream of the diverter 13 a conveyor belt 14 (or another equivalent device) suitable to impart on the bottles a translational movement along the aforesaid feed direction X from an inlet portion 15 to the diverter 13.
- the aforesaid bottle receiving device 10 is fed by a traditional bottle transport line (not illustrated) that connects the laying plant 1 to a bottling plant (not illustrated).
- the bottle receiving device 10 it is possible to define a center line M-M, substantially parallel to or corresponding to the bottle feed direction X set by the aforesaid conveyor belt 1.
- the two bottle storage lanes 11 and 12 extend parallel to this bottle feed direction X on opposite sides relative to this center line M-M so as to define the aforesaid free space 17, wherein is arranged the aforesaid bottle positioning system 30.
- each bottle storage lane 11 and 12 is supported by a longitudinal appendage 11a and 12a of a main support structure 14a of the conveyor belt 14.
- each storage lane 11, 12 is equipped on the outside with a longitudinal bottle containment barrier 11b, 12b, while there are no barriers on the inside facing the free space 17, to allow the bottle positioning system 30 to freely access the bottles stored therein.
- each storage lane 11, 12 is equipped with limit stop means 16, which are suitable to limit the bottle storage area within a predefined longitudinal segment of the lane.
- limit stop means 16 are adjustable.
- the longitudinal extension of the bottle storage area is chosen according to how much the operating area of intervention of the bottle positioning system 30 extends longitudinally within the aforesaid free space 17.
- the bottles B moved by the conveyor belt 14 reach the diverter 13 which directs them by sorting them into the two storage lanes 11, 12.
- the bottles move along the storage lanes 11, 12 by the pushing imparted by the bottles that progressively enter the lanes.
- the storage lanes 11, 12 are equipped with a smooth bottom (to avoid friction) or rollers.
- the diverter 13 is defined by:
- the aforesaid system 30 for positioning bottles in ativ-bêche configuration comprises a plurality of bottle handling devices 31, 32.
- Each bottle handling device 31, 32 is suitable to pick up a single bottle vertically from one of the two storage lanes 11, 12 of the bottle receiving device 10 (see figures 5 to 8 ) and position it horizontally in the space between the two storage lanes 11, 12 with the bottom-neck extension axis Y arranged transversely to the aforesaid bottle feed direction X and with neck-bottom orientation reversed relative to the orientation received by the bottles positioned by the two handling devices 32 adjacent thereto (see figures 9 to 11 ).
- the set of aforesaid handling devices 31, 32 arranges horizontally one or more groups of bottles placed side by side to each other in ativ-bêche configuration.
- the aforesaid handling devices 31, 32 are organized into two distinct operating groups.
- the handling devices 31 of a first group are suitable to take bottles from a first 11 of the aforesaid two storage lanes 11 and lay them horizontally with a first neck-bottom orientation
- the handling devices 32 of a second group are suitable to take bottles from the other storage lane 12 and lay them horizontally with a second neck-bottom orientation, inverted relative to the first.
- the handling devices 31, 32 of the two operating groups are arranged in alternating sequence in a direction parallel to the aforesaid bottle feed direction X.
- each handling device 31, 32 may be positioned adjustably relative to the other handling devices 31, 32 in the longitudinal direction (parallel to the feed direction X) and/or in the transverse direction (orthogonally to the feed direction X) relative to the feed direction X in order to adapt the positioning of the bottles int-bêche configuration to the different formats of the bottles that may be handled by the plant 1.
- each handling device 31, 32 is movable transversely relative to the feed direction X in order to adjust the gripping distance on the bottles B arranged in the relative storage lane 11, 12.
- the handling devices 31 or 32 belonging to the same operating group are movable all together transversely.
- the aforesaid handling devices 31 and 32 are aligned on two separate rows F1 and F2, parallel to the aforesaid feed direction X, one for each operating group.
- the number of handling devices 31 and 32 in each row F1 and F2 may be chosen at the design stage according to the working time of the plant 1.
- the handling devices 31 and 32 may be divided into modular sets, which are arranged in series along the feed axis X and are suitable to act on the bottles present in the two storage lanes independently.
- Each modular set comprises handling devices arranged on the two rows F1 and F2, and therefore suitable to act on both storage lanes 11, 12.
- each support frame 310a, 320a may be constituted by a carriage which is guided slidably by guides 340 arranged transversely to the feed direction X.
- the handling devices 31 or 32 in each row are kinematically associated to a worm screw 310 or 320, which is in turn associated to the respective support frame 310a or 320a and extends parallel to said feed direction X.
- the rotation of the worm screw 310 or 320 determines the axial sliding of the devices 31 or 32 associated thereto and thus their axial distribution along the worm screw 310 or 320, so as to vary the axial (longitudinal) pitch of the bottles int-bêche configuration.
- the worm screws may be replaced by any other device suitable for the purpose, such as a rack and pinion system or a lever system.
- the handling devices 31 or 32 of each row F1 or F2 are kinematically interconnected to each other also by spacing means 311 or 312 suitable to ensure a regular spacing between the devices 31 or 32 of a same row as their axial positioning varies along the relative worm screw 310 or 320.
- the aforesaid spacing means 311 and 312 consist of a kinematic chain with articulated rods, which connects the handling devices 31 or 32 of a same row F1 or F2 in sequence to each other and to some reference points.
- the two support frames 310a, 320a of the two operating groups of handling devices 31, 32 are movable transversely to the feed direction X within the free space 17 between the two storage lanes 11, 12 in a coordinated manner using common handling means 331, 332.
- this transverse sliding may be aimed both at adjusting the gripping distance on the bottles B placed in the relative storage lane 11, 12, and at varying the transverse pitch of the bottles int-bêche configuration.
- each worm screw 310 or 320 is associated to a respective support frame 310a or 320a, slidably guided by guides 340 arranged transversely to the feed direction X.
- each of the two support frames 310a and 320a is kinematically associated to a worm screw 331 and 332, arranged with its axis transverse to the feed direction X.
- the two worm screws 331 and 332 have opposite threads (one clockwise and the other counterclockwise) and are joined together centrally. Operatively, the rotation of one of the two worm screws 332 (e.g.
- each bottle handling device 31, 32 of the aforesaid bottle positioning system 30 comprises a bottle gripper element 33, which is movable, preferably by rotation, between:
- each bottle handling device 31, 32 comprises:
- the support frame 35 consists of an L-profile with a first horizontal portion 35a for fixing to the base 36 and a second vertical portion 35b for pivoting the gripper element 33.
- the frame 35 is associated to the actuator 37 (preferably consisting of a pneumatic cylinder).
- each bottle gripping element 33 is suitable to grip a bottle with at least one vacuum suction cup 34.
- vacuum suction cups as gripping elements is made possible in that the handling devices 31 and 32 are called upon to orient the bottles in a static operating condition, i.e. in an operating condition not associated with a simultaneous movement of the entire handling device.
- the device for transferring bottles 40 comprises:
- the aforesaid movable bottle gripper head 41 comprises a plurality of gripper elements 42, each of which is suitable to grip a bottle B.
- the aforesaid gripper elements 42 are distributed on two parallel rows L1 and L2 to grip one or more groups of bottles B already arranged int-bêche configuration.
- each bottle gripping element 42 is suitable to grip a bottle by means of at least one vacuum suction cup 43.
- vacuum suction cups as gripper elements in the movable bottle gripper head 41 is made possible in that this movable head 41 is not required to change the relative orientation of the bottles to arrange them invit-bêche configuration, but only to transfer bottles already arranged in such configuration from one point to another of the plant 1.
- the gripper elements 42 of each row L1 and L2 are movable in relation to each other so as to adjust the pitch and thus adapt them to the bottle format. This may be achieved in a constructively simple way due to the fact that vacuum suction cups, and not mechanical clamps, may be used as gripper elements.
- the laying plant 1 is automated and comprises an electronic control unit 100 which is programmed to control at least the bottle positioning system 30 and the bottle transferring device 40 so that, while the bottle transferring device 40 is transferring one or more groups of bottles B in the27-bêche configuration towards the laying line 20 picked up by the bottle positioning system 30, the bottle positioning system 30 is preparing one or more groups of bottles in theis-bêche configuration.
- This laying method is implemented by means of a laying plant 1 comprising:
- the laying method is implemented by means of a laying plant 1 according to the present invention, and in particular as described above.
- the method according to the invention comprises the following operative steps:
- the aforesaid step a) of positioning bottles is implemented by a system 30 to position one or more groups of bottles int-bêche configuration, while the aforesaid step b) is implemented by a device 40 to transfer one or more groups of bottles int-bêche configuration into the line for laying in containers.
- the bottle positioning system 30 is structurally and functionally separate from the bottle transferring device 40.
- the bottle positioning step a) is carried out at the same time as the execution of the transferring step b) on at least one group of bottles different from that on which said transferring step b) is being performed.
- the invention allows many advantages already partly described to be obtained.
- the plant for laying bottles in ativ-bêche arrangement allows flexible management of bottle format changes, significantly reducing the need to replace the bottle transferring device in the laying line, without, however, increasing the mechanical complexity of such bottle transferring device.
- the bottle laying system according to the invention is moreover easy to manage from an operative point of view.
- bottle laying plant according to the invention is simple and economical to implement.
- the laying plant 1 may be structured to flexibly manage bottle format changes, significantly reducing the need to replace the movable device for gripping and handling bottles, without, however, increasing the mechanical complexity of the bottle transferring device.
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Specific Conveyance Elements (AREA)
- Hydroponics (AREA)
- Agricultural Chemicals And Associated Chemicals (AREA)
Abstract
Description
- The object of the present invention is a plant and a method for laying bottles in a tête-bêche (head-to-tail) arrangement.
- "Bottle" means in particular a container for liquids, mostly made of glass, of any shape, in particular of a cylindrical shape which narrows upwards into the so-called neck.
- Generally speaking, "plant for laying bottles in a tête-bêche arrangement" means a plant suitable to lay bottles within a container. Such a container may be destined for packing bottles, and be constituted for example by a box or crate, or be a container for the temporary storage of bottles, intended to be subsequently transferred.
- In particular, the plant and the method according to the invention are applicable to laying bottles containing wine or sparkling wine, but may be applied to laying bottles containing any type of liquid, food and non-food.
- In the wine sector in particular, there is a need to lay in a container (for packing or temporary) some types of wine in a horizontal position. Thus, in order to optimize the space within the packing box/crate or also to make the product more visible at the point of sale or to keep the content in an optimal state (i.e. to avoid the so-called cork taste in the case of wine), the bottles must be positioned with an arrangement called in jargon "tête-bêche".
- A "tête-bêche" (head-to-tail) arrangement is generally understood to mean the arrangement of two things of the same kind, so that the upper part of one is facing or alongside the lower part of the other. In other words, arranging bottles in a "tête-bêche" manner means arranging the bottles side by side to each other horizontally, alternately reversing the neck-bottom orientation, as shown in
Figure 1 where some bottles B are shown arranged inside a box S. - Generally, for laying bottles in a tête-bêche manner, laying systems with a gripper device mounted on a Cartesian axis movement structure are used. Such a movable gripper device is in turn equipped with a plurality of mechanical clamps suitable to grip the bottles by the neck. These mechanical clamps, placed side by side to each other, are rotatable in parallel planes. Operatively, the movable gripper device is carried on a bottle conveyor line to receive the bottles in a vertical position. Each mechanical clamp grips a bottle arranged vertically by the neck. The movable gripper device lifts the mechanical clamp with the attached bottles. During lifting, each mechanical clamp is rotated so that the relative bottle is brought into a horizontal position. Each clamp is configured to impart on the relative bottle a movement of rotation in the direction opposite to the adjacent clamps. In this way, once the rotation is complete, the bottles are arranged horizontally in a tête-bêche arrangement. At this point, the movable gripper device may transport the bottles in a laying line into containers and lay in one or more containers (e.g. boxes/packing crates) the bottles already in the tête-bêche arrangement.
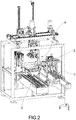
- An example of a bottle laying plant described above is shown in
Figure 2 , where A indicates the movable gripper device, E the single, orientable mechanical clamp, C the bottle transport line and D the line for laying in containers. - The laying plant described above, while fully performing its function, nevertheless has a number of limitations.
- A first limitation is linked to the constructive complexity of the movable gripper device. Such device must, in effect, be able to carry out all the steps of handling and laying the bottles: from gripping the bottles to laying them in the box. Such mechanical complexity increases the cost and weight of the same movable device.
- A second limitation is linked to the fact that, in the interest of containing the construction complexity, each movable gripper device is configured to act specifically on only one specific bottle format. One of the main parameters that identify a bottle format for the purpose of handling a bottle is the cross section of the bottle body, identifiable by its maximum dimension, which in particular corresponds to the maximum bottle diameter in the case of a substantially circular cross section. The fact that the movable gripper device is configured for a specific bottle format has a negative effect on the operative flexibility of the laying plant. In effect, when changing the bottle format, it is necessary to replace the movable gripper device, resulting in machine stops and operator interventions. The creation of a gripper device capable of adapting to bottle format changes would, in effect, impart further constructive complications, which would be excessively onerous in terms of increasing the cost and weight of the movable device.
- From an operative point of view, the weight of the gripper device complicates replacement operations if this becomes necessary, for example, for changing the bottle format or for maintenance.
- Finally, the use of the aforesaid gripper device extends the operating cycle times of the laying plant. The laying plant remains in effect in stand-by during the execution of each single cycle of operations of gripping, rotating and laying the bottles. This leads to the introduction of long downtimes.
- There is, therefore, a need for a bottle laying plant with a tête-bêche arrangement that overcomes all or at least part of the limitations set out above in the solutions of the prior art, and in particular that allows flexible management of bottle format changes, significantly reducing the need to replace the movable gripper device, without, however, increasing the mechanical complexity of the movable gripper device.
- Therefore, the object of the present invention is to eliminate all or part of the drawbacks of the prior art mentioned above, by providing a plant for laying bottles in a tête-bêche arrangement which allows bottle format changes to be flexibly managed, significantly reducing the need to replace the movable gripper device, without however leading to an increase in the mechanical complexity of the movable gripper device.
- A further object of the present invention is to provide a plant for laying bottles in a tête-bêche arrangement that is easily manageable from an operative point of view.
- A further object of the present invention is to provide a plant for laying bottles in a tête-bêche arrangement that is simple and economical to implement.
- The technical features of the invention, according to the aforesaid objects, are clearly apparent from the content of the claims provided below and the advantages thereof will become more apparent in the following detailed description, made with reference to the accompanying drawings, which represent one or more purely illustrative and non-limiting embodiments thereof, wherein:
-
Figure 1 shows an example of bottles placed in a container, consisting in particular of a packing box, in a tête-bêche arrangement; -
Figure 2 shows an example of a traditional plant for laying bottles in a tête-bêche arrangement; -
Figure 3 shows a detail of a movable gripper device usable in a traditional plant for laying bottles in a tête-bêche arrangement; -
Figure 4 shows a collective perspective view from above of a plant for laying bottles in a tête-bêche arrangement according to a preferred embodiment of the invention; -
Figure 5 shows a perspective view from above of a part of the plant illustrated inFigure 4 , relating to a bottle receiving device integrated with a system for positioning bottles in tête-bêche configuration, illustrated with bottle handling means in the initial bottle pick-up position; -
Figure 6 shows an orthogonal view from above of the plant part ofFigure 5 ; -
Figure 7 shows a cross-sectional view of the plant part ofFigure 6 according to the cross-sectional plane VII-VII indicated therein; -
Figure 8 shows a cross-sectional view of the plant part ofFigure 6 according to the cross-sectional plane VIII-VIII shown therein; -
Figure 9 shows a perspective view from above of the plant part ofFigure 5 , illustrated with bottle handling means in the final tête-bêche bottle preparation position; -
Figure 10 shows an orthogonal view from above of the plant part ofFigure 9 ; -
Figure 11 shows a cross-sectional view of the plant part ofFigure 10 according to the cross-sectional plane XI-XI indicated therein; -
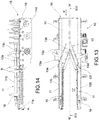
Figure 12 shows a perspective view from above of a component of the plant part illustrated inFigures 5 and9 , relating to a bottle receiving device; -
Figure 13 shows an orthogonal view from above of the bottle receiving device inFigure 12 ; -
Figure 14 shows a cross-sectional view of the bottle receiving device inFigure 13 according to the cross-sectional plane XIV-XIV indicated therein; -
Figure 15 shows a perspective view from above of some further components of the plant part illustrated inFigures 5 and9 , relating to a support structure and the support and movement means of the bottle handling means; -
Figure 16 shows an orthogonal view from above of the components illustrated inFigure 15 ; -
Figure 17 shows a cross-sectional view of the components illustrated inFigure 16 according to the cross-sectional plane XVII-XVII indicated therein; -
Figure 18 shows a cross-sectional view of the components illustrated inFigure 15 according to the cross-sectional plane XVIII-XVIII indicated therein; -
Figure 19 shows a cross-sectional view of the components illustrated inFigure 18 according to the cross-sectional plane XIX-XIX indicated inFigure 18 ; -
Figure 20 shows a perspective view of a single element of the bottle handling means, illustrated in the initial bottle pick-up position; -
Figure 21 shows a cross-sectional view of the element shown inFigure 20 according to a cross-sectional plane XXI indicated therein; -
Figure 22 shows a perspective view of the individual element of the bottle handling means ofFigure 20 , illustrated in the final tête-bêche bottle preparation position; -
Figure 23 shows a cross-sectional view of the element shown inFigure 22 according to a cross-sectional plane XXII indicated therein; -
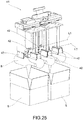
Figure 24 shows a perspective view from above of a component of the plant illustrated inFigure 4 , relating to a movable bottle gripper head of a movable bottle transferring device; -
Figure 25 shows a perspective view of the movable bottle gripper head ofFigure 24 , with some parts removed to better illustrate others; and -
Figure 26 shows a cross-sectional view of the movable bottle gripper head illustrated inFigure 24 according to a cross-sectional plane XXVI indicated therein. - With reference to the accompanying drawings a plant for laying bottles according to the invention has been collectively indicated at 1.
- For sake of simplicity, the laying method according to the invention will be described after the
laying plant 1, making reference in particular to the latter. - Here and in the description and claims that follow, reference will be made to the
laying plant 1 in the condition of use. It is in this sense that any references to a lower or upper position, or to a horizontal or vertical orientation, are therefore to be understood. - The
plant 1 for laying bottles in a tête-bêche arrangement according to the invention is generally suitable to lay bottles inside a container. Such a container may be destined for packing bottles, and be constituted for example by a box or crate, or be a container for the temporary storage of bottles, intended to be subsequently transferred. - According to a general embodiment of the invention, the plant for laying bottles in a tête-
bêche arrangement 1 comprises: - a
device 10 for receiving bottles in input in vertical position, connectible to a bottle transport line; - a line for laying
bottles 20 in containers; - a
system 30 for positioning in tête-bêche configuration one or more groups of bottles received by theaforesaid receiving device 10; and - a
device 40 for transferring one or more groups of bottles in the tête-bêche configuration from the aforesaid positioning system to theaforesaid laying line 20. - As shown in the accompanying Figures, the
bottle positioning system 30 is structurally and functionally distinct from thebottle transferring device 40. - In other words, according to the present invention, the movable device for gripping bottles present in the solutions of the prior art has been divided into two distinct systems/devices, i.e. the
bottle positioning system 30 and thebottle transferring device 40. - Due to the invention, the bottle handling operations necessary to lay the bottles in a tête-bêche configuration are completely separate and distinct from the operations of transferring the bottles into the laying line. Handling operations and transfer operations are in effect carried out by operatively separate and autonomous systems/devices.
- More specifically, the
bottle positioning system 30 may thus be structured and sized in such a way as to carry out only the operations aimed at laying the bottles in a tête-bêche configuration, since the execution of the operations of transferring these bottles to the layingline 20 is completely entrusted to thebottle transferring device 40. Conversely, thebottle transferring device 40 may be structured and sized in such a way as to perform only the operations of transferring bottles (already in the tête-bêche configuration) to the layingline 20, since the execution of the operations aimed at laying bottles in the tête-bêche configuration is completely entrusted to theaforementioned positioning system 30. - A first advantage of such an operative separation is that it is possible to simplify the mechanical structure of the
bottle transferring device 40, since it is no longer required for this device to impart the relative rotation movements among the bottles handled thereby. In effect, thebottle transferring device 40 is called to engage in gripping groups of bottles already arranged in the tête-bêche configuration. Once the bottles have been engaged, thebottle transferring device 40 may be limited to transferring them in bulk to the layingline 20 in containers. At most, thetransfer device 40 may be configured to separate (divide) two distinct groups of bottles by means of a simple relative movement of translation. - Moreover, due to the fact that the
transfer device 40 does not have to impart relative rotation movements among the bottles, it is possible to structure thisdevice 40 in such a way that it may be adapted to different bottle formats (in particular, according to the maximum size/diameter of the bottle), for example by equipping it with means suitable to vary the distance provided between the components for gripping the bottles. It is also possible to use - as bottle grippers - vacuum suction cups instead of more complex mechanical clamps. - Finally, again due to the fact that the
bottle transferring device 40 is not required to change the relative orientation of the bottles in order to lay them in a tête-bêche configuration, but rather only to transfer bottles already arranged in this configuration from one point of theplant 1 to another, it is possible to significantly simplify the relative support and movement structure. In particular, as will be seen later, as a support and movement structure, it is possible to adopt a robotic arm, instead of a more cumbersome system of Cartesian axes. - A second advantage of the aforesaid operative separation is that it is also possible to simplify the mechanical structure of the
system 30 for positioning bottles in a tête-bêche configuration. - In effect, unlike prior art solutions, the
bottle positioning system 30 is no longer required to orient bottles in a tête-bêche configuration operating suspended in the air and in movement, but rather it may carry out such manipulations operating in a "static" configuration, i.e. without requiring thesystem 30 as a whole to move with respect to the relative support structure. This makes it possible to structure thissystem 30 in such a way that it may be adapted to different bottle formats, for example by equipping it with means suitable to vary the distance provided between the components for handling the bottles. The fact that the handling of the bottles in the tête-bêche configuration is not linked to transferring also makes it possible to use - as bottle gripping elements - vacuum suction cups instead of more complex mechanical clamps. Finally, it is possible to significantly simplify also the support structure of thebottle positioning system 30. - Due to the invention, the laying
plant 1 may be structured to flexibly manage bottle format changes, significantly reducing the need to replace the movable device for gripping and handling bottles, without, however, increasing the mechanical complexity of the bottle transferring device. - A third advantage of the aforesaid operative separation is that it is possible to reduce downtime in the operative cycle of the laying plant. In effect, as will be explained below, the operations of positioning bottles in tête-bêche configuration may continue even at the same time as transferring bottles into the laying line.
- In general, the
line 20 for laying in containers is suitable for presenting in sequence the containers within which the bottles are to be laid in a tête-bêche arrangement. As already mentioned, the containers may be packing containers (such as boxes or crates) or temporary containers. In this sense, the layingline 20 in theplant 1 may be completely traditional and is therefore well known to a person skilled in the art. It will therefore not be described in detail. - In particular, in the accompanying figures, the
line 20 for laying in containers has been illustrated as a bottle packaging line. This illustration should be understood as purely illustrative and non-limiting. - According to a preferred embodiment of the invention illustrated in the accompanying figures, the
aforesaid system 30 for positioning bottles in a tête-bêche configuration is associated to thedevice 10 for receiving bottles. - The aforesaid
bottle transferring device 40 comprises: - a movable
bottle gripper head 41; and - means 45 for moving the aforesaid movable
bottle gripper head 41 in space. - Preferably, the aforesaid movement means consist of a
robotic arm 45. Alternatively, it is possible to provide that the aforesaid movement means are made up of a system of Cartesian axes. - Advantageously, as illustrated in particular in
Figures 5 to 11 , theaforesaid system 30 for positioning bottles in a tête-bêche configuration may be structurally integrated into thebottle receiving device 10. - As already mentioned above, the bottle positioning system 30 - since it does not perform the function of transferring bottles to the laying line - does not require a dedicated support structure, which is sized to withstand the vibrations and stresses generated by the movement of large weights suspended in the air. Therefore, the
bottle positioning system 30 may use the support structure of other parts of the plant, in particular of thebottle receiving device 10. - In particular, as illustrated in
Figure 5 , this support structure may be constituted by a support frame (such as a framework with a plurality of support legs on the ground) that defines a horizontal support surface on the top thereof. - According to the preferred embodiment of the invention illustrated in particular in
Figures 12 ,13 and 14 , theaforesaid device 10 for receiving bottles comprises: - two separate
bottle storage lanes 11; 12, which extend parallel to each other along a bottle feed direction X and are transversely separated from each other to define afree space 17; and - a
bottle diverter 13 suitable to distribute the bottles between the twostorage lanes - The
aforesaid system 30 for positioning bottles in the tête-bêche configuration is positioned in thefree space 17 between the aforesaid twobottle storage lanes storage lanes - Due to this configuration, the bottles arrive in the proximity of the
positioning system 30, already arranged so as to be able to be picked up. This avoids therefore the need to move the bottle positioning system towards the bottles. - More specifically, the
bottle receiving device 10 comprises upstream of thediverter 13 a conveyor belt 14 (or another equivalent device) suitable to impart on the bottles a translational movement along the aforesaid feed direction X from aninlet portion 15 to thediverter 13. - Operatively, the aforesaid
bottle receiving device 10 is fed by a traditional bottle transport line (not illustrated) that connects thelaying plant 1 to a bottling plant (not illustrated). - On the
bottle receiving device 10 it is possible to define a center line M-M, substantially parallel to or corresponding to the bottle feed direction X set by theaforesaid conveyor belt 1. The twobottle storage lanes free space 17, wherein is arranged the aforesaidbottle positioning system 30. - In particular, each
bottle storage lane longitudinal appendage main support structure 14a of theconveyor belt 14. - Advantageously, each
storage lane bottle containment barrier free space 17, to allow thebottle positioning system 30 to freely access the bottles stored therein. - Advantageously, each
storage lane bottle positioning system 30 extends longitudinally within the aforesaidfree space 17. - Operatively, the bottles B moved by the
conveyor belt 14 reach thediverter 13 which directs them by sorting them into the twostorage lanes storage lanes storage lanes - Specifically, the
diverter 13 is defined by: - a fixed V-shaped
sorter element 13a, withvertex 13b aligned with the center line M-M, and - two
adjustable walls sorter 13a to define two conveyinglanes storage lanes adjustable walls - Preferably, as shown in
Figures 5 to 11 , theaforesaid system 30 for positioning bottles in a tête-bêche configuration comprises a plurality ofbottle handling devices - Each
bottle handling device storage lanes figures 5 to 8 ) and position it horizontally in the space between the twostorage lanes handling devices 32 adjacent thereto (seefigures 9 to 11 ). In this way, the set ofaforesaid handling devices - Advantageously, as illustrated in particular in
Figures 6, 7 and 8 , theaforesaid handling devices - More specifically, the handling
devices 31 of a first group are suitable to take bottles from a first 11 of the aforesaid twostorage lanes 11 and lay them horizontally with a first neck-bottom orientation, while thehandling devices 32 of a second group are suitable to take bottles from theother storage lane 12 and lay them horizontally with a second neck-bottom orientation, inverted relative to the first. - The
handling devices - Preferably, each handling
device other handling devices plant 1. - Advantageously, each handling
device relative storage lane - Preferably, as provided in the embodiment illustrated in the accompanying Figures, the handling
devices - According to the preferred embodiment illustrated in particular in
Figures 6, 8 ,10, 11 ,15 and16 , theaforesaid handling devices - Advantageously, the number of
handling devices plant 1. - Advantageously, the handling
devices storage lanes - More specifically, the handling
devices relative support frame storage lanes support frame guides 340 arranged transversely to the feed direction X. - According to the embodiment shown in the accompanying Figures, the handling
devices worm screw respective support frame - Operatively, the rotation of the
worm screw 310 or 320 (for example by means of the relative electronically controlled motors M1 and M2) determines the axial sliding of thedevices worm screw - The worm screws may be replaced by any other device suitable for the purpose, such as a rack and pinion system or a lever system.
- Preferably, the handling
devices devices relative worm screw - Preferably, as illustrated in particular in
Figures 15 to 19 , the aforesaid spacing means 311 and 312 consist of a kinematic chain with articulated rods, which connects thehandling devices - Advantageously, the two
support frames devices free space 17 between the twostorage lanes - Operatively, this transverse sliding may be aimed both at adjusting the gripping distance on the bottles B placed in the
relative storage lane - In particular, as illustrated in the accompanying Figures, and in particular in
Figures 15 to 19 , eachworm screw respective support frame guides 340 arranged transversely to the feed direction X. In turn, each of the twosupport frames worm screw worm screws other worm screw 331 and collectively determines the axial sliding of the twosupport frames support frames - Preferably, as illustrated in particular in
Figures 20 to 23 , eachbottle handling device bottle positioning system 30 comprises abottle gripper element 33, which is movable, preferably by rotation, between: - a bottle pick-up position, wherein the
gripper element 33 is positioned vertically near the relativebottle storage lane Figures 5 ,8 ,20, 21 ), and - a bottle orientation position, wherein the
gripper element 33 is positioned horizontally to position a bottle taken from itsstorage lane storage lanes 11, 12 (seeFigures 9 ,11 ,22, 23 ). - According to the embodiment shown in the accompanying Figures, each
bottle handling device - a
support frame 35, to which thegripper element 33 is rotationally associated; - a
kinematic coupling base 36 to therespective worm screw support frame 35 is attached; and - an
actuator 37, suitable to push thegripper element 33 to cause the rotation thereof relative to theframe 35. - In particular, the
support frame 35 consists of an L-profile with a firsthorizontal portion 35a for fixing to thebase 36 and a secondvertical portion 35b for pivoting thegripper element 33. Theframe 35 is associated to the actuator 37 (preferably consisting of a pneumatic cylinder). - Preferably, as illustrated in the accompanying Figures, each
bottle gripping element 33 is suitable to grip a bottle with at least onevacuum suction cup 34. - The use of vacuum suction cups as gripping elements is made possible in that the
handling devices - As already mentioned above, according to a preferred embodiment illustrated in the accompanying figures, the device for transferring
bottles 40 comprises: - a movable
bottle gripper head 41; and - means 45 for moving in space the aforesaid movable
bottle gripper head 41. - Advantageously, as illustrated in particular in
Figures 24 ,25 and26 , the aforesaid movablebottle gripper head 41 comprises a plurality ofgripper elements 42, each of which is suitable to grip a bottle B. - More specifically, the
aforesaid gripper elements 42 are distributed on two parallel rows L1 and L2 to grip one or more groups of bottles B already arranged in tête-bêche configuration. - Advantageously, each
bottle gripping element 42 is suitable to grip a bottle by means of at least onevacuum suction cup 43. - The use of vacuum suction cups as gripper elements in the movable
bottle gripper head 41 is made possible in that thismovable head 41 is not required to change the relative orientation of the bottles to arrange them in tête-bêche configuration, but only to transfer bottles already arranged in such configuration from one point to another of theplant 1. - Advantageously, the
gripper elements 42 of each row L1 and L2 are movable in relation to each other so as to adjust the pitch and thus adapt them to the bottle format. This may be achieved in a constructively simple way due to the fact that vacuum suction cups, and not mechanical clamps, may be used as gripper elements. - Preferably, as shown schematically in
Figure 4 , the layingplant 1 is automated and comprises anelectronic control unit 100 which is programmed to control at least thebottle positioning system 30 and thebottle transferring device 40 so that, while thebottle transferring device 40 is transferring one or more groups of bottles B in the tête-bêche configuration towards the layingline 20 picked up by thebottle positioning system 30, thebottle positioning system 30 is preparing one or more groups of bottles in the tête-bêche configuration. - As shown above, this reduces downtime in the operating cycle of
plant 1. - The method of laying bottles in a tête-bêche arrangement according to the invention will now be described.
- This laying method is implemented by means of a
laying plant 1 comprising: - a
device 10 for receiving bottles in input in vertical position, connectible to a bottle transport line; and - a line for laying
bottles 20 in containers. - Preferably, the laying method is implemented by means of a
laying plant 1 according to the present invention, and in particular as described above. - More specifically, the method according to the invention comprises the following operative steps:
- a) positioning in the tête-bêche configuration one or more groups of bottles B received by the
aforesaid receiving device 10; and - b) transferring one or more groups of bottles in the tête-bêche configuration in the
bottle laying line 20, - According to the invention, the aforesaid step a) of positioning bottles is implemented by a
system 30 to position one or more groups of bottles in tête-bêche configuration, while the aforesaid step b) is implemented by adevice 40 to transfer one or more groups of bottles in tête-bêche configuration into the line for laying in containers. - The
bottle positioning system 30 is structurally and functionally separate from thebottle transferring device 40. - Preferably, the bottle positioning step a) is carried out at the same time as the execution of the transferring step b) on at least one group of bottles different from that on which said transferring step b) is being performed.
- The advantages offered by the invention already highlighted above when describing the
laying plant 1 also apply to the laying method and will not be repeated here for brevity of description. - The invention allows many advantages already partly described to be obtained.
- The plant for laying bottles in a tête-bêche arrangement according to the invention allows flexible management of bottle format changes, significantly reducing the need to replace the bottle transferring device in the laying line, without, however, increasing the mechanical complexity of such bottle transferring device.
- The bottle laying system according to the invention is moreover easy to manage from an operative point of view.
- Finally, the bottle laying plant according to the invention is simple and economical to implement.
- The laying
plant 1 may be structured to flexibly manage bottle format changes, significantly reducing the need to replace the movable device for gripping and handling bottles, without, however, increasing the mechanical complexity of the bottle transferring device. - The invention thus conceived therefore achieves the foregoing objects.
- Obviously, in its practical implementation, it may also be assumed to take on embodiments and configurations other than those described above without departing from the present scope of protection.
- Moreover, all details may be replaced by technically equivalent elements, and the dimensions, shapes and materials used may be of any kind according to the needs.
Claims (21)
- Plant for laying bottles in a tête-bêche arrangement comprising:- a device (10) for receiving bottles in input in vertical position, connectable to a bottle transport line;- a line for laying bottles (20) in containers;- a system (30) for positioning in the tête-bêche arrangement one or more groups of bottles received by said receiving device (10); and- a device (40) for transferring one or more groups of bottles in the tête-bêche arrangement from said positioning system to said laying line,wherein said bottle positioning system (30) is structurally and functionally separate from said bottle transferring device (40).
- Plant according to claim 1, wherein said system (30) for positioning bottles in the tête-bêche configuration is associated with said device (10) for receiving bottles and wherein said bottle transferring device (40) comprises a movable, bottle gripper head (41) and means (45) for moving in space said movable bottle gripper head (41), preferably said movement means consisting of a robotic arm (45).
- Plant according to claim 1 or 2, wherein said system (30) for positioning bottles in the tête-bêche configuration is structurally incorporated in said bottle receiving device (10).
- Plant according to one or more of the preceding claims, wherein said bottle receiving device (10) comprises:- two separate bottle storage lanes (11; 12), which extend parallel to each other along a bottle feed direction (X) and are transversely separated from each other to define a free space (17); and- a bottle diverter (13) suitable to distribute the bottles between the two storage lanes (11, 12),and wherein said system (30) for positioning bottles in the tête-bêche configuration is located in the free space (17) between said two bottle storage lanes (11, 12) and is suitable to operate on bottles present in said two storage lanes (11, 12).
- Plant according to claim 4, wherein said system (30) for positioning bottles in the tête-bêche configuration comprises a plurality of bottle handling devices (31, 32), each of which is suitable to pick up a single bottle in vertical position from one of the two storage lanes (11, 12) and to position it horizontally in the space between the two storage lanes (11, 12) with the bottle bottom-neck axis of extension (Y) placed transversely to said bottle feed direction (X) and with a neck-bottom orientation inverted relative to the orientation received by the bottles positioned by two handling devices (32) adjacent thereto, so that the set of said handling devices (31, 32) arrange horizontally one or more groups of bottles placed side by side to each other in the tête-bêche configuration.
- Plant according to claim 5, wherein said handling devices (31, 32) are organized into two separate operating groups and wherein the handling devices (31) of a first group are suitable to pick up bottles from a first (11) of said two storage lanes and position them horizontally with a first neck-bottom orientation, while the handling devices (32) of a second group are suitable to pick up bottles from the other storage lane (12) and position them horizontally with a second neck-bottom orientation, inverted relative to the first, the devices (31, 32) of said two operating groups being arranged in alternating sequence along a direction parallel to said bottle feed direction (X).
- Plant according to claim 5 or 6, wherein each handling device (31, 32) is positionable in an adjustable manner relative to the other handling devices (31, 32) in the longitudinal direction and/or in a direction transverse to said feed direction (X) so as to adapt the positioning of the bottles in the tête-bêche configuration to the different sizes of bottles that may be processed by the plant (1).
- Plant according to claim 5, 6 or 7, wherein each handling device (31, 32) is movable transversely relative to said feed direction (X) in order to adjust the gripping distance on the bottles (B) placed in the relative storage lane (11, 12), preferably the handling devices (31 or 32) of an operating group being movable all together transversely.
- Plant according to claim 6, 7 or 8, wherein the handling devices (31; 32) are aligned on two separate rows, parallel to said feed direction (X), one for each operating group, and wherein the handling devices (31, 32) of each row are associated to a support frame (310a, 320a) movable transversely to said feed direction (X) within the space comprised between the two storage lanes (11, 12).
- Plant according to claim 9, wherein the handling devices (31, 32) of each row are kinematically associated to a worm screw (310; 320), which is in turn associated to the respective support frame (310a, 320a) and extends parallel to said feed direction (X) and wherein the rotation of said worm screw (310, 320) determines the axial sliding of the devices (31, 32) associated thereto and thus their axial distribution along the worm screw (310; 320) to change the axial pitch of the bottles in the tête-bêche configuration.
- Plant according to claim 10, wherein the devices (31, 32) of each row are kinematically interconnected to each other also by spacing means (311; 312) suitable to ensure a regular spacing between the devices (31 or 32) to vary their axial positioning along the relative worm screw (310; 320), preferably said spacing means (311; 312) being constituted by a kinematic chain with articulated rods.
- Plant according to one or more of claims 9 to 11, wherein the two support frames (310a, 320a) of the two operating groups are movable transversely to said feed direction (X) in a coordinated manner by shared movement means (331, 332).
- Plant according to one or more of claims 5 to 12, wherein each bottle handling device (31, 32) of said bottle positioning system (30) comprises a bottle gripper element (33), which is movable, preferably by rotation, between a bottle pick-up position, wherein said gripper element (33) is positioned vertically near the relative bottle storage lane (11, 12) to pick up a bottle by gripping it, and a bottle orientation position, wherein said gripper (33) is positioned horizontally to position horizontally in the space between the two storage lanes (11, 12) a bottle picked up from the relative storage lane (11, 12).
- Plant according to claim 13, wherein each bottle gripper element (33) is suitable to exert a gripping action on a bottle by means of at least one vacuum suction cup (34).
- Plant according to one or more of claims 2 to 14, wherein the movable bottle gripper head (41) of said bottle transferring device (40) comprises a plurality of gripper elements (42), each of which is suitable to grip a bottle, and wherein said gripper elements (42) are distributed on two parallel rows to grip one or more groups of bottles arranged in the tête-bêche configuration.
- Plant according to claim 15, wherein said gripper elements (42) of each row are movable relative to each other so as to adjust the pitch and thus adapt them to the bottle format.
- Plant according to claim 15 or 16, wherein each bottle gripper element (42) is suitable to exert the gripping action on a bottle by means of at least one vacuum suction cup (43).
- Plant according to one or more of the preceding claims, wherein said laying plant (1) is automated and comprises an electronic control unit (100) which is programmed to control at least said bottle positioning system (30) and said bottle transferring device (40) so that, while the bottle transferring device (40) is transferring one or more groups of bottles in the tête-bêche configuration towards said laying line (20) picked up by said bottle positioning system (30), the bottle positioning system (30) is preparing one or more groups of bottles in the tête-bêche configuration.
- Method of laying bottles in a tête-bêche arrangement, implemented by means of a laying plant (1) comprising: - a device (10) for receiving bottles in input in vertical position, connectable to a bottle transport line; and - a line for laying bottles (20) in containers,
said method comprises the following operating steps:- a) positioning in the tête-bêche configuration one or more groups of bottles received by said receiving device (10); and- b) transferring one or more groups of bottles in the tête-bêche configuration to said bottle laying line (20), wherein said bottle positioning step a) is implemented by a system (30) for positioning in the tête-bêche configuration one or more groups of bottles and said step b) is implemented by a device (40) for transferring one or more groups of bottles in the tête-bêche configuration to said laying line (20), wherein said bottle positioning system (30) is structurally and functionally separate from said bottle transferring device (40). - Laying method according to claim 19, wherein said bottle positioning step a) is carried out at the same time as the execution of said transferring step b) on at least one group of bottles different from that on which said transferring step b) is being performed.
- Laying method according to claim 19 or 20, wherein said laying method is implemented by means of a laying plant (1) according to one or more of the claims from 1 to 18.
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| IT102018000004445A IT201800004445A1 (en) | 2018-04-12 | 2018-04-12 | PLANT AND METHOD OF DEPOSITION OF BOTTLES WITH TÊTE-BÊCHE ARRANGEMENT |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| EP3552978A1 true EP3552978A1 (en) | 2019-10-16 |
| EP3552978B1 EP3552978B1 (en) | 2021-03-03 |
Family
ID=63014760
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP19167965.3A Active EP3552978B1 (en) | 2018-04-12 | 2019-04-08 | Plant and method for laying bottles in a tête-bêche arrangement |
Country Status (2)
| Country | Link |
|---|---|
| EP (1) | EP3552978B1 (en) |
| IT (1) | IT201800004445A1 (en) |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US3878665A (en) * | 1973-03-12 | 1975-04-22 | Chandon Handels Gmbh | Bottle packing installation |
| FR2420483A1 (en) * | 1978-03-21 | 1979-10-19 | Lafarge Emballage | Bottle case filling machine - has bottles supplied from racks by conveyors including cradles on each side of box conveyor |
| US20030168873A1 (en) * | 2000-07-12 | 2003-09-11 | Mario Lanfranchi | Head for transferring containers, in particular bottles, within a palletiser |
| FR2940794A1 (en) * | 2009-01-07 | 2010-07-09 | Champaconcept | Wine bottles handling and layering method, involves handling batch of bottles to position axes of batch of bottles parallel to each other in horizontal plane along one layer and according to step defined by set of support and spacing units |
-
2018
- 2018-04-12 IT IT102018000004445A patent/IT201800004445A1/en unknown
-
2019
- 2019-04-08 EP EP19167965.3A patent/EP3552978B1/en active Active
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US3878665A (en) * | 1973-03-12 | 1975-04-22 | Chandon Handels Gmbh | Bottle packing installation |
| FR2420483A1 (en) * | 1978-03-21 | 1979-10-19 | Lafarge Emballage | Bottle case filling machine - has bottles supplied from racks by conveyors including cradles on each side of box conveyor |
| US20030168873A1 (en) * | 2000-07-12 | 2003-09-11 | Mario Lanfranchi | Head for transferring containers, in particular bottles, within a palletiser |
| FR2940794A1 (en) * | 2009-01-07 | 2010-07-09 | Champaconcept | Wine bottles handling and layering method, involves handling batch of bottles to position axes of batch of bottles parallel to each other in horizontal plane along one layer and according to step defined by set of support and spacing units |
Also Published As
| Publication number | Publication date |
|---|---|
| EP3552978B1 (en) | 2021-03-03 |
| IT201800004445A1 (en) | 2019-10-12 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US8286409B2 (en) | Method and apparatus, in a bottling plant, for packing beverage bottles in cases with and without dividers and a method and apparatus for packing containers in cases with and without dividers | |
| US10442638B2 (en) | Method and apparatus for conveying articles, piece goods and/or bundles within at least two conveying path sections | |
| US8997438B1 (en) | Case packing system having robotic pick and place mechanism and dual dump bins | |
| US9790037B2 (en) | Machine, process, container and packaging for packing tetrahedral-shaped products | |
| EP4003845B1 (en) | An article picking and treating apparatus | |
| US11053082B2 (en) | Method and apparatus for handling piece goods moved one after the other in at least one row | |
| ITMI20100410A1 (en) | SUPPLY STATION AND FEEDING AND BOTTLE TREATMENT SYSTEM INCLUDING SUCH STATION | |
| CN206704608U (en) | A kind of two axis joint robots vanning unit | |
| EP4183724A1 (en) | Machine for positioning objects | |
| US11530060B2 (en) | Handling apparatus and/or packaging apparatus and method used to package article groups in outer packaging | |
| US12116157B2 (en) | Modular apparatus for filling and closing articles | |
| EP3552978B1 (en) | Plant and method for laying bottles in a tête-bêche arrangement | |
| KR20230130615A (en) | System for handling individual primary packaging containers | |
| US20180170590A1 (en) | Product packaging apparatus | |
| CN114450227A (en) | Packaging equipment | |
| EP3842351A1 (en) | An article picking and treating apparatus | |
| EP3453653A1 (en) | End of line pick and place unit | |
| WO2003024803A2 (en) | Packaging apparatus and method for packaging articles into a folded blank | |
| CN109110464B (en) | Logistics automatic distribution system and method thereof | |
| KR200464716Y1 (en) | Case moving apparatus | |
| ITUB20155339A1 (en) | PAPER-SANDING MACHINE WITH CLAMPING DEVICE. |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: THE APPLICATION HAS BEEN PUBLISHED |
|
| AK | Designated contracting states |
Kind code of ref document: A1 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| AX | Request for extension of the european patent |
Extension state: BA ME |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: REQUEST FOR EXAMINATION WAS MADE |
|
| 17P | Request for examination filed |
Effective date: 20200408 |
|
| RBV | Designated contracting states (corrected) |
Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| GRAP | Despatch of communication of intention to grant a patent |
Free format text: ORIGINAL CODE: EPIDOSNIGR1 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: GRANT OF PATENT IS INTENDED |
|
| RIC1 | Information provided on ipc code assigned before grant |
Ipc: B65B 35/58 20060101ALI20200903BHEP Ipc: B65B 21/20 20060101ALI20200903BHEP Ipc: B65B 59/00 20060101ALI20200903BHEP Ipc: B65B 21/02 20060101AFI20200903BHEP |
|
| INTG | Intention to grant announced |
Effective date: 20200928 |
|
| GRAS | Grant fee paid |
Free format text: ORIGINAL CODE: EPIDOSNIGR3 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: GRANT OF PATENT IS INTENDED |
|
| GRAA | (expected) grant |
Free format text: ORIGINAL CODE: 0009210 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: THE PATENT HAS BEEN GRANTED |
|
| AK | Designated contracting states |
Kind code of ref document: B1 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| REG | Reference to a national code |
Ref country code: GB Ref legal event code: FG4D |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: EP Ref country code: AT Ref legal event code: REF Ref document number: 1366969 Country of ref document: AT Kind code of ref document: T Effective date: 20210315 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R096 Ref document number: 602019002860 Country of ref document: DE |
|
| REG | Reference to a national code |
Ref country code: IE Ref legal event code: FG4D |
|
| REG | Reference to a national code |
Ref country code: LT Ref legal event code: MG9D |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: BG Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210603 Ref country code: FI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210303 Ref country code: GR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210604 Ref country code: HR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210303 Ref country code: NO Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210603 Ref country code: LT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210303 |
|
| REG | Reference to a national code |
Ref country code: NL Ref legal event code: MP Effective date: 20210303 |
|
| REG | Reference to a national code |
Ref country code: AT Ref legal event code: MK05 Ref document number: 1366969 Country of ref document: AT Kind code of ref document: T Effective date: 20210303 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210303 Ref country code: RS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210303 Ref country code: PL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210303 Ref country code: LV Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210303 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: NL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210303 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: AT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210303 Ref country code: SM Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210303 Ref country code: EE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210303 Ref country code: CZ Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210303 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R119 Ref document number: 602019002860 Country of ref document: DE |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: PT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210705 Ref country code: RO Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210303 Ref country code: SK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210303 Ref country code: IS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210703 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: LU Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20210408 |
|
| PLBE | No opposition filed within time limit |
Free format text: ORIGINAL CODE: 0009261 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: NO OPPOSITION FILED WITHIN TIME LIMIT |
|
| REG | Reference to a national code |
Ref country code: BE Ref legal event code: MM Effective date: 20210430 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: ES Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210303 Ref country code: MC Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210303 Ref country code: AL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210303 Ref country code: DE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20211103 Ref country code: DK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210303 |
|
| 26N | No opposition filed |
Effective date: 20211206 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210303 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20210408 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210703 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: BE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20210430 |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: PL |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: LI Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20220430 Ref country code: CH Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20220430 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: CY Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210303 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: HU Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT; INVALID AB INITIO Effective date: 20190408 |
|
| GBPC | Gb: european patent ceased through non-payment of renewal fee |
Effective date: 20230408 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: GB Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20230408 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: GB Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20230408 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210303 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: IT Payment date: 20240305 Year of fee payment: 6 Ref country code: FR Payment date: 20240329 Year of fee payment: 6 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: TR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210303 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210303 |