EP3551155B1 - Apparatus and method for networked transportation of patients or people with impaired mobility - Google Patents
Apparatus and method for networked transportation of patients or people with impaired mobility Download PDFInfo
- Publication number
- EP3551155B1 EP3551155B1 EP17816402.6A EP17816402A EP3551155B1 EP 3551155 B1 EP3551155 B1 EP 3551155B1 EP 17816402 A EP17816402 A EP 17816402A EP 3551155 B1 EP3551155 B1 EP 3551155B1
- Authority
- EP
- European Patent Office
- Prior art keywords
- transportation
- patient
- ward
- docking
- bed
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000000034 method Methods 0.000 title claims description 9
- 230000001771 impaired effect Effects 0.000 title claims 3
- 238000003032 molecular docking Methods 0.000 claims description 22
- 230000000474 nursing effect Effects 0.000 claims description 8
- 238000011282 treatment Methods 0.000 claims description 5
- 230000000694 effects Effects 0.000 claims description 2
- 230000001939 inductive effect Effects 0.000 claims description 2
- 238000012544 monitoring process Methods 0.000 description 4
- 230000005540 biological transmission Effects 0.000 description 3
- 239000000725 suspension Substances 0.000 description 3
- 102000004315 Forkhead Transcription Factors Human genes 0.000 description 2
- 108090000852 Forkhead Transcription Factors Proteins 0.000 description 2
- 241000309551 Arthraxon hispidus Species 0.000 description 1
- 208000001871 Tachycardia Diseases 0.000 description 1
- 230000002996 emotional effect Effects 0.000 description 1
- 230000005484 gravity Effects 0.000 description 1
- 230000000284 resting effect Effects 0.000 description 1
- 230000000087 stabilizing effect Effects 0.000 description 1
- 230000006794 tachycardia Effects 0.000 description 1
- 230000036642 wellbeing Effects 0.000 description 1
Images



Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61G—TRANSPORT, PERSONAL CONVEYANCES, OR ACCOMMODATION SPECIALLY ADAPTED FOR PATIENTS OR DISABLED PERSONS; OPERATING TABLES OR CHAIRS; CHAIRS FOR DENTISTRY; FUNERAL DEVICES
- A61G7/00—Beds specially adapted for nursing; Devices for lifting patients or disabled persons
- A61G7/08—Apparatus for transporting beds
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61G—TRANSPORT, PERSONAL CONVEYANCES, OR ACCOMMODATION SPECIALLY ADAPTED FOR PATIENTS OR DISABLED PERSONS; OPERATING TABLES OR CHAIRS; CHAIRS FOR DENTISTRY; FUNERAL DEVICES
- A61G5/00—Chairs or personal conveyances specially adapted for patients or disabled persons, e.g. wheelchairs
- A61G5/04—Chairs or personal conveyances specially adapted for patients or disabled persons, e.g. wheelchairs motor-driven
- A61G5/047—Chairs or personal conveyances specially adapted for patients or disabled persons, e.g. wheelchairs motor-driven by a modular detachable drive system
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61G—TRANSPORT, PERSONAL CONVEYANCES, OR ACCOMMODATION SPECIALLY ADAPTED FOR PATIENTS OR DISABLED PERSONS; OPERATING TABLES OR CHAIRS; CHAIRS FOR DENTISTRY; FUNERAL DEVICES
- A61G2203/00—General characteristics of devices
- A61G2203/10—General characteristics of devices characterised by specific control means, e.g. for adjustment or steering
- A61G2203/22—General characteristics of devices characterised by specific control means, e.g. for adjustment or steering for automatically guiding movable devices, e.g. stretchers or wheelchairs in a hospital
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61G—TRANSPORT, PERSONAL CONVEYANCES, OR ACCOMMODATION SPECIALLY ADAPTED FOR PATIENTS OR DISABLED PERSONS; OPERATING TABLES OR CHAIRS; CHAIRS FOR DENTISTRY; FUNERAL DEVICES
- A61G2203/00—General characteristics of devices
- A61G2203/70—General characteristics of devices with special adaptations, e.g. for safety or comfort
- A61G2203/80—General characteristics of devices with special adaptations, e.g. for safety or comfort for connecting a trolley to a device, e.g. bed or column table
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61G—TRANSPORT, PERSONAL CONVEYANCES, OR ACCOMMODATION SPECIALLY ADAPTED FOR PATIENTS OR DISABLED PERSONS; OPERATING TABLES OR CHAIRS; CHAIRS FOR DENTISTRY; FUNERAL DEVICES
- A61G7/00—Beds specially adapted for nursing; Devices for lifting patients or disabled persons
- A61G7/05—Parts, details or accessories of beds
Definitions
- the invention relates to a system and a method for the networked transportation of patients or persons with restricted mobility.
- a device for transporting patients or mobility-impaired persons in a sick bed or nursing bed, wherein a single transport vehicle can pick up a sick bed via a docking beam and move it autonomously from a starting point to a destination.
- an electric trolley for transporting hospital beds comprising: a support frame (1) which has a support platform (11) on the bottom and is provided with a stand (12) on both sides; a drive unit (2) which has at least one electric motor (21) fastened to the support platform (11), two drive wheels (22) and two rollers (23), the two drive wheels (22) extending through a motor shaft of the electric motor (21) rotate and the two drive wheels (22) together with the two rollers (23) support the complete electric trolley; at least one locking device (3) which is located between the two uprights (12) of the support frame (1) and has a lever (31) and a clamping unit (33), the clamping unit (33) having a first and a second clamping jaw (331) , 332) and wherein the second clamping jaw (332) can be moved away from or towards the first clamping jaw (331) under the action of the lever (31); and
- the DE 20 2013 103 255 U1 known trolleys essentially to move a hospital bed quickly with less effort and to relieve nurses.
- the present invention is based on the object of specifying a system and a method with which hospital beds can be transported automatically without the aid of human mobility, the respective transport process being electronically controlled and monitored and safety arrangements and measures ensuring the well-being of the transported person .
- Fig.1 shows the transport vehicle according to the invention in two sectional views.
- Fig.1a denotes the chassis or the base body for the conveying system according to the invention and is shown as seen from the top.
- the reference number 2 denoted on the front, relates to a laser scanner of the type that it is approved for personal protection due to special quality features.
- the same component is on the back.
- a double-lane bridge track 3 running in the middle of the chassis 1 in the longitudinal direction over almost the entire length of the chassis 1 carries a carriage 5 which can be moved over the entire length of the bridge track 3 by means of a drive 4.
- a docking traverse 6 is attached to the carriage 5 and is rotatably mounted on the carriage 5 by means of a rotating device 16. The drive for this is labeled 10.
- the docking cross member 6 is in the Fig. 1a ) drawn perpendicular to the direction of travel.
- the 7 on the chassis 1 denotes a data transmitter and a data receiver which are responsible for controlling the entire device and its security system.
- the chassis 1 has some safety sensors and additional sensors 9 for vehicle monitoring, which also serve to minimize shadows when obstacles are scanned.
- the top of the chassis has a lifting platform 11 for the vertical movement of the bridge track 3. With such a vertical movement of the bridge track 3, all devices connected to the docking traverse 6 are also moved vertically.
- the chassis 1 can be seen in a side view, the lifting platform 11 being identified with its potential lifting movements.
- a short stop 13 and a long stop 15 of the docking traverse 6 are also shown here, with a latching trough in the middle between these two stops 15 is designated for the connection with a person - transport chair.
- the Fig. 2 shows an exemplary representation of the transport vehicle in connection with a transport chair.
- the docking cross member 6 with a cross member 25 of a people transport chair 21 can be seen on the lifting platform 11, the cross member 25 in FIG a not visible, snap-in transport trough 14 is located.
- the passenger transport chair 21 has safety sensors 22 at the level of the cross member 25, but these are only indicated on the left side here.
- a data transmitter and a data receiver are designated by the number 24, which are responsible for controlling the entire device of the chair and its safety system.
- a camera 17 attached to a rigid camera adjustment device 18 is used for face monitoring.
- a touchscreen can also be installed here, which transmits information to a patient, for example about waiting times or expected treatments. Games or messages can also be transmitted in this way.
- pulse meters 19 and sensors for detecting the skin resistance are attached.
- Transmitters 20 with a button for transmitting an emergency signal and an emergency off circuit are also provided here.
- a transport chair can be transported instead of a bed, whereby this can be provided with special additional devices suitable for the respective supply case for people in rehabilitation facilities. These can be, for example, joint supports or special measuring devices for tachycardias.
- Fig. 3 shows the use according to the invention of two transport vehicles with a care bed or hospital bed.
- a first or front transport vehicle 29 and a second or rear transport vehicle 30 are connected by means of a care bed mount 27 for transporting a care bed.
- the first transport vehicle has a cross member 28 on which acts as a docking cross member 6, as described in the description for Fig.1 and was shown on the second transport vehicle.
- the two laser scanners 2 are designated for the interconnection of the first and the second transport vehicle.
- the long stop 15 of the docking traverse 6 was used.
- At least one pressure sensor 23 is used to detect the occupancy of the care bed, as it is also mentioned in the description of the personal transport chair 21.
- a heart rate monitor 19 and sensors for detecting the skin resistance and a transmitter 20 with a button for sending an emergency signal and an emergency off circuit are provided for the patient 26 to be transported on the care bed.
- a transmitter and receiver unit for the control unit and the safety system of the care bed is attached to the foot end of the care bed.
- a camera 17 for face monitoring ensures that the patient's feelings are conveyed.
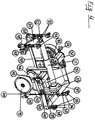
- Fig. 4 shows a spatial detailed view of the kinematics of a transport vehicle. This figure shows a transport vehicle without the surrounding chassis 1. Connections to the chassis 1 are indicated at the appropriate point.
- the left-hand drive wheel 12 known from FIG. 1 and an axis of rotation 43 can be seen in the foreground, this axis of rotation 43 being connected to the chassis 1 and not being designated there.
- the axle bearing 46 for the left-hand drive wheel 12 with its servomotor 45 located above it is connected to form a functional unit by means of an angle plate, which is not designated in more detail and can only be seen from the rear.
- the corresponding servomotor 57 for the right-hand drive can be seen on the opposite side.
- the corresponding angle plate can be seen from the rear on this side. Here is the in This angle plate running corresponding toothed belt 55 can be seen.
- the entire functional unit consists of the drive wheel 12 with the axle bearing 46, the servo motor 45 and the angle plate with its toothed belt and can be pivoted via the angle lever 42 over the axis of rotation 43.
- the angle lever 42 is fastened via the joint 40 to a U-shaped wishbone 34, at the other end of which the corresponding drive wheel is correspondingly fastened.
- a spring element 41 is also mounted on the joint 40, the other mounting point of which is attached to the housing.
- This articulation point, or bearing point is shown as a block-shaped, barely recognizable bearing on the left-hand side of the transport vehicle. In contrast, on the opposite side, this point is referred to as the articulation point 56 of the right spring element.
- the spring element 41 serves the purpose of pressing the drive wheel 12 onto the ground surface via the angle lever 42 and thus improving the ground contact of the drive wheel 12. The same applies to the opposite right drive wheel.
- FIG. 4 Another kinematic device is explained in the following for lifting the bridge platform 11, or the person transport chair that weighs on it, or a part of a patient's bed as a load.
- the front lifting rods 53 and the rear lifting rods 36 serve this purpose in direct contact.
- the lifting rods 53 and 36 are raised and lowered by means of an adjusting element 31, which applies the necessary forces by means of a threaded spindle via an extendable and retractable cylinder via a joint head 52 and an articulated rotary lift lever 51. From the Fig. 4 .
- the front lifting rods 53 each carry the corresponding front carrier plate suspension 54.
- a push rod 47 is articulated on the lifting and rotating lever 51, which transfers the movements of the lifting and rotating lever 51 via an axle lever 38 to a respective rear push rod lever 39.
- the movements of the rear push rod levers 39 lead to the necessary changes in the position of the two rear lifting rods 36.
- the rear lifting rods 36 each carry the corresponding rear carrier plate suspension 35.
- the actuating element 31 is moved via a drive 32 and a force transmission 33 that diverts the force.
- the force transmission 33 is attached to the wishbone 34 by means of a fork head 44.
- the wishbone 34 can move as a connecting element between the two angle levers 42, and this enables the two drive wheels to perform vertical pivoting movements that are independent of one another.
- the adjusting elements 50 for the front lifting rods 53 and the adjusting elements 37 for the rear lifting rods 36 are in the Fig. 4 marked as blackened areas of the corresponding lifting rods.
- the arrangement shown of the lifting rods 36 and 53, the lever arrangement 38,47,49, 51 in between and the actuating element 31 in cooperation with the wishbone 34 and its action on the angle lever 42 ensure that the center of gravity of the load is directly in the Area of the drive wheels.
- the support wheels 8 therefore essentially have a stabilizing function.
- There is a system for energy supply that is supplied either via inductive lines laid in the ground or via stationary accessible energy supply stations for charging batteries.
- the sick beds are either in special Storage rooms with their transport vehicles or they are stored on special storage racks which, with regard to the height of their base, enable them to be driven underneath and lifted by means of the transport vehicles.
- the control of the hospital beds or passenger transport chairs equipped with the respective transport vehicles takes place via one in the respective Hospital or care center, control center that enables two-way radio contact with all vehicles on a special radio frequency in all corridors and elevators to be used.
- a hospital bed is controlled by means of a special control that considers the two vehicles involved in the transport process as one unit. If the relevant control center decides that a patient is to be transported from a station A to a station B, the vehicle automatically drives the prescribed route with the patient in the relevant hospital bed. The respective nursing staff then decides whether the patient is transportable and reports the completed transport status to the control center. Depending on the expansion status of the entire transport system, the transport takes place either directly from the hospital room or from a special contact point in the respective hospital ward.
Landscapes
- Health & Medical Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- Animal Behavior & Ethology (AREA)
- General Health & Medical Sciences (AREA)
- Public Health (AREA)
- Veterinary Medicine (AREA)
- Nursing (AREA)
- Invalid Beds And Related Equipment (AREA)
- Handcart (AREA)
Description
Die Erfindung betrifft ein System und ein Verfahren zum vernetzten Befördern von Patienten oder bewegungsbehinderten Personen.The invention relates to a system and a method for the networked transportation of patients or persons with restricted mobility.
Als Besucher oder Patient in einem Krankenhaus oder einer Pflegestation wird man bald erkennen, dass ein wesentliches Problem darin besteht, behandlungsbedürftige Menschen von einem Behandlungsort zu einem anderen Behandlungsort oder in den jeweiligen Ruheort zu transportieren. In der Regel geschieht dies dadurch, dass der Transport eines Krankenbetts von zwei pflegenden Personen erfolgt, die zu einem bestimmten Zeitpunkt angefordert werden und dann das jeweilige Krankenbett mit dem betreffenden Patienten über verschiedene Gänge und Stockwerke schieben.As a visitor or patient in a hospital or a nursing ward, you will soon realize that a major problem is to transport people in need of treatment from one treatment location to another treatment location or to the respective resting place. As a rule, this is done by the transport of a sick bed by two caregivers who are requested at a certain point in time and then push the respective sick bed with the patient in question across different corridors and floors.
Aus der Druckschrift
Zum Stand der Technik wird ferner auf die Druckschrift
Nach den Angaben hinsichtlich der zugrundeliegenden Aufgaben dient der aus der
Ferner ist aus der Druckschrift
Der vorliegenden Erfindung liegt die Aufgabe zugrunde, ein System und ein Verfahren anzugeben, mit denen Krankenbetten selbsttätig ohne Zuhilfenahme von menschlicher Bewegungskraft befördert werden können, wobei der jeweilige Beförderungsvorgang elektronisch kontrolliert und überwacht werden kann und sicherheitstechnische Anordnungen und Maßnahmen für das Wohl des transportierten Menschen sorgen.The present invention is based on the object of specifying a system and a method with which hospital beds can be transported automatically without the aid of human mobility, the respective transport process being electronically controlled and monitored and safety arrangements and measures ensuring the well-being of the transported person .
Diese Aufgabe wird hinsichtlich des System durch die Merkmale des Patentanspruchs 1 und hinsichtlich des Verfahrens durch die Maßnahmen des Patentanspruchs 5 gelöst.This object is achieved with regard to the system by the features of
In den Unteransprüchen sind vorteilhafte Ausgestaltungen der Erfindung gekennzeichnet.Advantageous embodiments of the invention are characterized in the subclaims.
Das erfindungsgemäße System wird im Folgenden näher beschrieben.The system according to the invention is described in more detail below.
Es zeigen im Einzelnen:
-
Fig. 1 : zwei Schnittdarstellungen des erfindungsgemäßen Transportfahrzeugs, -
Fig.2 eine exemplarische Darstellung des Transportfahrzeugs in Verbindung mit einem Transportstuhl -
Fig.3 : die Verwendung zweier Transportfahrzeuge bei einem Pflegebett -
Fig.4 : eine räumliche Detailansicht der Kinematik eines Transportfahrzeugs
-
Fig. 1 : two sectional views of the transport vehicle according to the invention, -
Fig. 2 an exemplary representation of the transport vehicle in connection with a transport chair -
Fig. 3 : the use of two transport vehicles with one care bed -
Fig. 4 : a spatial detailed view of the kinematics of a transport vehicle
Die
Mit 1 ist hier in der
Mit 7 sind auf dem Fahrgestell 1 ein Datensender und ein Datenempfänger bezeichnet die für die Steuerung der gesamten Vorrichtung und deren Sicherheitssystem zuständig sind.7 on the
Von den vier Gelenkstützrollen 8 sind in der
Die Oberseite des Fahrgestells weist eine Hubplattform 11 zur Vertikalbewegung der Brückenbahn 3 auf. Mit einer solchen Vertikalbewegung der Brückenbahn 3 werden auch sämtliche mit der Andocktraverse 6 verbundenen Vorrichtungen vertikal bewegt.The top of the chassis has a
In der
Die
Zur Erkennung der Belegung der Sitzfläche des Personen - Transportstuhls 21 weist diese einige Drucksensoren 23 auf, wobei nur Sensor bezeichnet ist. Weiter sind im Bereich der Sitzfläche des Personen - Transportstuhls 21 ein Datensender und ein Datenempfänger mit der Ziffer 24 bezeichnet die für die Steuerung der gesamten Vorrichtung des Stuhls und dessen Sicherheitssystem zuständig sind.To detect the occupancy of the seat surface of the
Zur Überwachung des Gefühlszustands einer zu transportierenden Person, bzw. eines Patienten 26, dient eine, an einer biegesteifen Kamera - Justiervorrichtung 18 befestigte, Kamera 17 zur Gesichtsüberwachung. Anstelle einer Kamera kann hier auch ein Touuchscreen installiert sein der einem Patienten Informationen übermittelt zum Beispiel über Wartezeiten oder zu erwartende Behandlungen. Ebenso können auf diese Weise auch Spiele oder Nachrichten übermittelt werden.To monitor the emotional state of a person to be transported or a
Im Bereich einer Hand eines Patienten 26 sind Pulsmesser 19 und Sensoren zur Erfassung des Hautwiderstands angebracht. Weiter sind hier Sender 20 mit einem Taster zur Aussendung eines Notsignals und einer Notaus - Schaltung vorgesehen. Als Sonderbauform kann vorgesehen sein, dass anstelle eines Bettes ein Transportstuhl transportiert wir, wobei dieser für Personen in Rehabilitations - Einrichtungen mit, für den jeweiligen Versorgungsfall geeigneten, speziellen Zusatzvorrichtungen versehen sein kann. Dies können zum Beispiel Gelenkstützen oder besondere Messgeräte für Tachykardien seien.In the area of a hand of a
Wie der
Am Fußende des Pflegebetts ist eine Sende - und Empfangseinheit für die Steuereinheit und das Sicherheitssystem des Pflegebetts angebracht. Eine Kamera 17 für die Gesichtsüberwachung sorgt für die Übermittlung der Gefühle des Patienten.Again
A transmitter and receiver unit for the control unit and the safety system of the care bed is attached to the foot end of the care bed. A
Das Achslager 46 für das linksseitige Antriebsrad 12 mit seinem darüber liegenden Servomotor 45 ist mittels eines, nicht näher bezeichneten und nur von hinten zu sehenden, Winkelblech zu einer Funktionseinheit verbunden. In diesem Winkelblech läuft ein Zahnriemen über den der Servomotor 45 die Rotationsachse des linksseitigen Antriebsrads 12 antreibt. Auf der gegenüber liegenden Seite ist der entsprechende Servomotor 57 für den rechtsseitigen Antrieb zu erkennen. Auf dieser Seite ist das entsprechende Winkelblech von der Rückseite zu sehen. Hier ist der in diesem Winkelblech laufende entsprechende Zahnriemen 55 zu erkennen. Die gesamte Funktionseinheit besteht aus dem Antriebsrad 12 mit dem Achslager 46, dem Servomotor 45 und dem Winkelblech mit seinem Zahnriemen, ist über den Winkelhebel 42 über die Drehachse 43 schwenkbar. Der Winkelhebel 42 ist über das Gelenk 40 an einem U - förmigen Querlenker 34 befestigt, an dessen anderem Ende das entsprechende Antriebsrad entsprechend befestigt ist. An dem Gelenk 40 ist weiter ein Federelement 41 gelagert, dessen anderer Lagerungspunkt am Gehäuse befestigt ist. Auf der in der
The
Eine weitere kinematische Einrichtung wird im Folgenden zum Anheben der Brückenplattform 11, bzw. des auf ihr lastenden Personen - Transportstuhls oder eines Teils eines Patientenbetts als Last, erläutert.
Um eine Last aufnehmen zu können ist es erforderlich, dass das Transportfahrzeug nach dem Darunterfahren unter die jeweilige Last diese anhebt und ihren Bodenkontakt löst um sie transportieren zu können.
Diesem Zweck dienen in direktem Kontakt die vorderen Hubstangen 53 und die hinteren Hubstangen 36.
Angehoben und abgesenkt werden die Hubstangen 53 und 36 mittels eines Stellelements 31, das mittels einer Gewindespindel über einen ein - und ausfahrbaren Zylinder über einen Gelenkkopf 52 und einen angelenkten Hubdreh - Hebel 51 die hierfür notwendigen Kräfte aufbringt.
Aus der
Die vorderen Hubstangen 53 tragen jeweils die entsprechende vordere Trägerplatten - Aufhängung 54.Another kinematic device is explained in the following for lifting the
In order to be able to pick up a load, it is necessary that the transport vehicle lifts the respective load after driving underneath it and releases it from contact with the ground in order to be able to transport it.
The
The lifting
From the
The
Gleichzeitig ist diesem Bereich der
Die hinteren Hubstangen 36 tragen jeweils die entsprechende hintere Trägerplatten-Aufhängung 35.
Die Bewegung des Stellelements 31 erfolgt über einen Antrieb 32 und eine, die Kraft umleitende, Kraftübertragung 33. Die Kraftübertragung 33 ist mittels eines Gabelkopfes 44 am Querlenker 34 befestigt. Da der der Gabelkopf 44 drehbar am Querlenker 34 gelagert ist, kann sich der Querlenker 34, als Verbindungselement zwischen den beiden Winkelhebeln 42, bewegen, und so wird ermöglicht, dass die beiden Antriebsräder voneinander unabhängige, vertikale Schwenkbewegungen ausführen.
Die Stellelemente 50 für die vorderen Hubstangen 53 und die Stellelemente 37 für die hinteren Hubstangen 36 sind in der
The
The
The adjusting
Insgesamt wird durch die aufgezeigte Anordnung der Hubstangen 36 und 53, die dazwischen liegende Hebelanordnung 38,47,49 ,51 und das Stellelement 31 in Zusammenwirkung mit dem Querlenker 34, sowie dessen Einwirken auf den Winkelhebel 42 erreicht, dass der Schwerpunkt der Last direkt im Bereich der Antriebsräder liegt.
Die Stützräder 8 haben deshalb im Wesentlichen eine stabilisierende Funktion. Es ist ein System zur Energieversorgung vorhanden, das entweder über induktive, im Boden verlegte, Leitungen, oder über stationär anfahrbare Energieversorgungs-Stationen für das Aufladen von Batterien versorgt wird.
Die Krankenbetten werden entweder in besonderen
Lagerräumen mir ihren Transportfahrzeugen gelagert oder sie lagern auf speziellen Lagergestellen die bezüglich der Höhe ihrer Unterlage ein Darunterfahren und Anheben mittels der Transportfahrzeuge ermöglichen.
Die Steuerung der mit den jeweiligen Transportfahrzeugen bestückten Krankenbetten oder Personentransportstühle erfolgt über eine, im jeweiligen Krankenhaus oder Pflegezentrum vorhandene, Steuerzentrale, die in sämtlichen zu befahrenden Gängen und Aufzügen einen wechselseitigen Funkkontakt mit allen Fahrzeugen auf einer besonderen Funkfrequenz ermöglicht.
Die Steuerung eines Krankenbetts erfolgt mittels einer besonderen Steuerung die die beiden am Transportvorgang beteiligte Fahrzeuge als eine Einheit betrachtet. Entscheidet die betreffende Steuerzentrale, dass ein Patient von einer Station A zu einer Station B zu befördern ist, fährt das Fahrzeug mit dem Patienten in dem betreffenden Krankenbett automatisch den vorgeschriebenen Weg. Hierbei entscheidet dann das jeweilige Pflegepersonal ob der Patient transportfähig ist und meldet den fertigen Transportzustand an die Steuerzentrale. Je nach dem Ausbauzustand des gesamten Transportsystems erfolgt dann der Transport entweder direkt aus dem Krankenzimmer oder von einer besonderen Anlaufstation der jeweiligen Krankenstation.Overall, the arrangement shown of the lifting
The
The sick beds are either in special
Storage rooms with their transport vehicles or they are stored on special storage racks which, with regard to the height of their base, enable them to be driven underneath and lifted by means of the transport vehicles.
The control of the hospital beds or passenger transport chairs equipped with the respective transport vehicles takes place via one in the respective Hospital or care center, control center that enables two-way radio contact with all vehicles on a special radio frequency in all corridors and elevators to be used.
A hospital bed is controlled by means of a special control that considers the two vehicles involved in the transport process as one unit. If the relevant control center decides that a patient is to be transported from a station A to a station B, the vehicle automatically drives the prescribed route with the patient in the relevant hospital bed. The respective nursing staff then decides whether the patient is transportable and reports the completed transport status to the control center. Depending on the expansion status of the entire transport system, the transport takes place either directly from the hospital room or from a special contact point in the respective hospital ward.
- 11
- Fahrgestellchassis
- 22
- LaserscannerLaser scanner
- 33
-
Brückenbahn für den Fahrschlitten 5Bridge track for the
carriage 5 - 44th
-
Antrieb für den Fahrschlitten 5Drive for the
carriage 5 - 55
-
Fahrschlitten (auf der Brückenbahn) mit Dreheinrichtung 16 für eine Andocktraverse 6Driving carriage (on the bridge runway) with
rotating device 16 for adocking traverse 6 - 66th
- Andocktraverse für Personentransportstuhl oder PflegebettDocking cross member for passenger transport chair or care bed
- 77th
- Datenempfänger für die Steuerung und ein SicherheitssystemData receiver for the control and a safety system
- 88th
- GelenkstützrolleArticulated support roller
- 99
- Sicherheitssensoren und Zusatzsensoren zur Fahrraum - ÜberwachungSafety sensors and additional sensors for driving area monitoring
- 1010
- Antrieb für Dreheinrichtung der Andocktraverse 6 (vgl. Fahrschlitten 5)Drive for rotating device of the docking traverse 6 (see carriage 5)
- 1111th
-
Brückenplattform zur Vertikalbewegung der Brückenbahn 3Bridge platform for vertical movement of the
bridge track 3 - 1212th
- Antriebräder eines autonomen TransportfahrzeugsDriving wheels of an autonomous transport vehicle
- 1313th
-
kurzer Anschlag der Andocktraverse 6short stop of the
docking traverse 6 - 1414th
- Einrast - Transport - Mulde für den Transport eines TransportstuhlsSnap-in transport trough for transporting a transport chair
- 1515th
-
Langer Anschlag der Andocktraverse 6Long stop of the
docking traverse 6 - 1616
-
Dreheinrichtung für die Andocktraverse 6Rotating device for the
docking traverse 6 - 1717th
- Kamera für Gesichts - Überwachung, TouchscreenFace surveillance camera, touch screen
- 1818th
-
biegesteife Justiereinrichtung für die Kamera 17 mit einer StuhlbefestigungRigid adjustment device for the
camera 17 with a chair attachment - 1919th
- Pulsmesser und Sensoren zur Erfassung des HautwiderstandsHeart rate monitors and sensors for recording skin resistance
- 2020th
- Sender mit einem Taster zur Aussendung eines Notsignals und einer Notaus - SchaltungTransmitter with a button for sending an emergency signal and an emergency stop switch
- 2121
- Personen - TransportstuhlPassenger transport chair
- 2222nd
- Sicherheitssensoren, Scanschatten - MinimierungSafety sensors, scan shadows - minimization
- 2323
- Drucksensoren in der SitzflächePressure sensors in the seat
- 2424
-
Sende - und Empfangseinheit für die Steuereinheit und das Sicherheitssystem des Personen - Transportstuhls 21Transmitter and receiver unit for the control unit and the safety system of the
passenger transport chair 21 - 2525th
-
Querträger des Personen - Transportstuhls 21 und Andockstelle für die Transport - Mulde 14Cross member of the
passenger transport chair 21 and docking point for thetransport trough 14 - 2626th
- Patient oder transportierte PersonPatient or person being transported
- 2727
- Lafette für ein Pflegebett, bzw. KrankenbettCarriage for a care bed or hospital bed
- 2828
-
Querträge der Lafette 27 eines Pflegebetts und Andockstelle für eine Andocktraverse 6Cross members of the
carriage 27 of a care bed and docking point for adocking cross member 6 - 2929
- vorderes oder erstes Transportfahrzeugfront or first transport vehicle
- 3030th
- hinteres oder zweites Transportfahrzeugrear or second transport vehicle
- 3131
- Stellelement, GewindespindelControl element, threaded spindle
- 3232
-
Antrieb für das Stellelement 31Drive for the adjusting
element 31 - 3333
-
Kraftübertragung vom Antrieb 32 zum Stellelement 31Power transmission from
drive 32 to actuatingelement 31 - 3434
- QuerlenkerWishbones
- 3535
- hintere Hubstangerear lifting rod
- 3636
- hintere Hubstangerear lifting rod
- 3737
- Stellelement für eine hintere HubstangeControl element for a rear lifting rod
- 3838
- AchshebelAxle lever
- 3939
- hinterer Hubstangenhebelrear lift rod lever
- 4040
-
Gelenk für einen Winkelhebel 40Joint for an
angle lever 40 - 4141
- FederelementSpring element
- 4242
- WinkelhebelAngle lever
- 4343
- DrehachseAxis of rotation
- 4444
- GabelkopfClevis
- 4545
- Servomotor für linkseitiges AntriebsradServo motor for left-hand drive wheel
- 4646
- Achslager für das linksseitige AntriebsradAxle bearing for the left-hand drive wheel
- 4747
- SchubstangePush rod
- 4848
- Drehachse für einen vorderen HubstangenhebelRotation axis for a front lift rod lever
- 4949
- vorderer Hubstangenhebelfront lift rod lever
- 5050
- Stellelement für eine vordere HubstangeControl element for a front lifting rod
- 5151
- Hubdreh - HebelLifting rotary lever
- 5252
- GelenkkopfSwivel head
- 5353
- vordere Hubstangefront lifting rod
- 5454
- vordere Trägerplatten - Aufhängungfront support plates - suspension
- 5555
- Zahnriemen für den rechtsseitigen AntriebToothed belt for the right-hand drive
- 5656
-
Anlenkpunkt des rechten Federelements am Gehäuse 3Articulation point of the right spring element on the
housing 3 - 5757
- Servomotor für den rechtsseitigen AntriebServo motor for the right-hand drive
Claims (5)
- System for networked transportation of patients or people with impaired mobility in a hospital bed or nursing bed, having the following features:a) a first transportation vehicle (29) and a second transportation vehicle (30) which are configured in the same way and which each have:a chassis (1), drive wheels (12) and a bridge track (3) on a raiseable and lowerable bridge platform (11),wherein a rotatable carriage (5) with a drive (4) for securing a docking crosspiece (6) is provided on the bridge track (3),wherein an adjusting element (31) is provided which is driven by a further drive (32) and which serves to actuate front lifting rods (53) and rear lifting rods (36), andwherein a lever arrangement (36, 47, 49, 51) lying between said lifting rods is provided for raising the bridge platform (11), which has the effect that the load thereon lies directly in the region of the drive wheels (12),b) an energy supply system which is powered either via inductive leads routed in the ground or via movable energy supply stations,c) a hospital bed having a mounting (27) with a crossmember (28) and a docking point for the docking crosspiece (6) of the first transportation vehicle (29) and a docking point for a long abutment (15) of the docking crosspiece (6) of the second transportation vehicle (30), andd) a control centre for controlling a transportation operation.
- System according to Claim 1,
characterized in that the two transportation vehicles (29, 30) taking part in the transportation are regarded as one unit in terms of control technology. - System according to one of the preceding claims,
characterized in that a camera (17) and/or a touchscreen is provided for communicative contact of the patient with the nursing staff. - System according to one of the preceding claims,
characterized in that devices for measuring the pulse and skin resistance (19) and an emergency signal transmitter with a corresponding button (20) are provided in the region of a patient. - Method for networked transportation of patients or people with impaired mobility in a hospital bed or nursing bed having a system according to one of Claims 1 to 4, with the following method features:a) a patient in question or a corresponding person needing care is reported by a control centre as requiring transportation from a ward A to another ward B,b) the nursing staff on ward A bed down or place the person in question in the hospital bed and report to the control centre when this person is correctly supported, wherein the identity is ensured by the nursing staff or can be checked by means of a patient identity card,c) the patient is automatically driven to ward B,d) the patient is admitted for his treatment in ward B and is then transported back to ward A by the same route.
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PL17816402T PL3551155T3 (en) | 2016-12-07 | 2017-11-27 | Apparatus and method for networked transportation of patients or people with impaired mobility |
| EP21176626.6A EP3895678B1 (en) | 2016-12-07 | 2017-11-27 | Device and method for the networked transport of patients or mobility-impaired persons |
| SI201731072T SI3551155T1 (en) | 2016-12-07 | 2017-11-27 | Apparatus and method for networked transportation of patients or people with impaired mobility |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| DE102016014566.8A DE102016014566B4 (en) | 2016-12-07 | 2016-12-07 | Apparatus and method for the networked transport of patients or persons with reduced mobility, as well as a computer program and a machine-readable carrier |
| PCT/DE2017/000405 WO2018103771A1 (en) | 2016-12-07 | 2017-11-27 | Apparatus and method for networked transportation of patients or people with impaired mobility |
Related Child Applications (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP21176626.6A Division EP3895678B1 (en) | 2016-12-07 | 2017-11-27 | Device and method for the networked transport of patients or mobility-impaired persons |
| EP21176626.6A Division-Into EP3895678B1 (en) | 2016-12-07 | 2017-11-27 | Device and method for the networked transport of patients or mobility-impaired persons |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| EP3551155A1 EP3551155A1 (en) | 2019-10-16 |
| EP3551155B1 true EP3551155B1 (en) | 2021-12-22 |
Family
ID=60702255
Family Applications (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP21176626.6A Active EP3895678B1 (en) | 2016-12-07 | 2017-11-27 | Device and method for the networked transport of patients or mobility-impaired persons |
| EP17816402.6A Active EP3551155B1 (en) | 2016-12-07 | 2017-11-27 | Apparatus and method for networked transportation of patients or people with impaired mobility |
Family Applications Before (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP21176626.6A Active EP3895678B1 (en) | 2016-12-07 | 2017-11-27 | Device and method for the networked transport of patients or mobility-impaired persons |
Country Status (8)
| Country | Link |
|---|---|
| US (1) | US11497667B2 (en) |
| EP (2) | EP3895678B1 (en) |
| DE (1) | DE102016014566B4 (en) |
| ES (1) | ES2906049T3 (en) |
| HU (1) | HUE057793T2 (en) |
| PL (1) | PL3551155T3 (en) |
| SI (1) | SI3551155T1 (en) |
| WO (1) | WO2018103771A1 (en) |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP7172845B2 (en) * | 2019-05-13 | 2022-11-16 | トヨタ自動車株式会社 | Information processing device, moving object, and information processing method |
| DE102020215206A1 (en) | 2020-12-02 | 2022-06-02 | Kuka Deutschland Gmbh | Coupling device, system with an autonomous vehicle and a patient transport device, and method for operating such a system |
Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20120029697A1 (en) * | 2010-07-30 | 2012-02-02 | Toyota Motor Engineering & Manufacturing North America, Inc. | Robotic transportation devices and systems |
Family Cites Families (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US7014000B2 (en) * | 2000-05-11 | 2006-03-21 | Hill-Rom Services, Inc. | Braking apparatus for a patient support |
| US7154397B2 (en) | 2001-08-03 | 2006-12-26 | Hill Rom Services, Inc. | Patient point-of-care computer system |
| JP2004222851A (en) | 2003-01-21 | 2004-08-12 | Mitsubishi Automob Eng Co Ltd | Self-traveling type medical bed |
| US7191854B2 (en) * | 2003-12-16 | 2007-03-20 | Lenkman Thomas E | Self propelled gurney and related structure confidential and proprietary document |
| US7419019B1 (en) * | 2006-03-23 | 2008-09-02 | Safe-T-Care Manufacturing, Co., Inc. | Power assist apparatus for use with a hospital bed |
| US9220651B2 (en) | 2012-09-28 | 2015-12-29 | Elwha Llc | Automated systems, devices, and methods for transporting and supporting patients |
| UA115359C2 (en) | 2013-03-15 | 2017-10-25 | Олтріа Клайєнт Сервісиз Ллк | An electronic smoking article |
| DE202013103255U1 (en) | 2013-07-19 | 2013-08-08 | Sunpex Technology Co., Ltd. | Electric transport cart for the transport of hospital beds |
| GB201319711D0 (en) | 2013-11-08 | 2013-12-25 | Univ Singapore | Retro-fit mobility unit |
-
2016
- 2016-12-07 DE DE102016014566.8A patent/DE102016014566B4/en not_active Expired - Fee Related
-
2017
- 2017-11-27 SI SI201731072T patent/SI3551155T1/en unknown
- 2017-11-27 HU HUE17816402A patent/HUE057793T2/en unknown
- 2017-11-27 WO PCT/DE2017/000405 patent/WO2018103771A1/en unknown
- 2017-11-27 EP EP21176626.6A patent/EP3895678B1/en active Active
- 2017-11-27 US US16/461,062 patent/US11497667B2/en active Active
- 2017-11-27 EP EP17816402.6A patent/EP3551155B1/en active Active
- 2017-11-27 PL PL17816402T patent/PL3551155T3/en unknown
- 2017-11-27 ES ES17816402T patent/ES2906049T3/en active Active
Patent Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20120029697A1 (en) * | 2010-07-30 | 2012-02-02 | Toyota Motor Engineering & Manufacturing North America, Inc. | Robotic transportation devices and systems |
Also Published As
| Publication number | Publication date |
|---|---|
| WO2018103771A1 (en) | 2018-06-14 |
| US11497667B2 (en) | 2022-11-15 |
| DE102016014566A1 (en) | 2018-06-07 |
| HUE057793T2 (en) | 2022-06-28 |
| EP3895678A1 (en) | 2021-10-20 |
| DE102016014566B4 (en) | 2019-03-14 |
| EP3895678B1 (en) | 2023-06-28 |
| EP3551155A1 (en) | 2019-10-16 |
| SI3551155T1 (en) | 2022-04-29 |
| US20190307623A1 (en) | 2019-10-10 |
| PL3551155T3 (en) | 2022-03-28 |
| ES2906049T3 (en) | 2022-04-13 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| DE102018211669B4 (en) | Omnidirectional chassis for a gantry of a computed tomography device | |
| DE2621021A1 (en) | SYSTEM AND EQUIPMENT FOR THE AUTOMATIC HANDLING OF HAND TROLLEYS, IN PARTICULAR HOSPITAL TROLLEYS | |
| AT505576A1 (en) | DEVICE FOR AUTOMATIC DOCKING OF APPLICATION MODULES TO AN ROBOT PLATFORM AND DEVICE FOR PROVIDING AND TRANSFERRING APPLICATION MODULES | |
| WO2015043563A2 (en) | Transport vehicle and method for a problem-free transport of heavy-duty shelves in workshops with radio shadowing using a partly autonomous drive mode | |
| EP0992217A1 (en) | Operating table system | |
| EP3551155B1 (en) | Apparatus and method for networked transportation of patients or people with impaired mobility | |
| DE212012000026U1 (en) | Electric drive system | |
| EP0524949B1 (en) | Stretcher rack | |
| EP1502563A1 (en) | Method for transporting a patient supporting surface and transporting device for carrying out the method. | |
| EP4051457B1 (en) | Mobile care assistance apparatus and patient transport logistics system | |
| DE19819993A1 (en) | Transport device for electric suspended railway | |
| DE112014000985T5 (en) | Lifting column, lifting system and method for lifting a vehicle, such as a rail vehicle | |
| DE102007018694A1 (en) | Bed, particularly hospital or care bed, has couch surface, which is height adjustable in relation to base and light field extends parallel to contour of couch surface, particularly for contour of lower side of couch surface | |
| DE202016007450U1 (en) | Device for the networked transport of patients or persons with reduced mobility | |
| EP1985237A1 (en) | Facility and method for automated positioning of a patient | |
| DE4025313C2 (en) | Rail-guided transport device and guide rails intended therefor and a transport system consisting of transport device and guide rails | |
| DE102017201187A1 (en) | Service system for mass transportation | |
| DE4317149C2 (en) | Dolly | |
| DE202013008718U1 (en) | Transport vehicle for the trouble-free transport of load racks in factory halls with radio shading and with partially autonomous driving | |
| EP3883516B1 (en) | Device and method for reversibly connecting a rehabilitation mechanism to a bed, and method for operating a rehabilitation mechanism connected to a bed | |
| AT12140U1 (en) | TRANSPORT SYSTEM WITH SELF-DRIVING TRANSPORT VEHICLES WITHOUT ANY OWN INTELLIGENCE | |
| EP3383340B1 (en) | Mobility support system | |
| DE202011105053U1 (en) | Bed, in particular nursing bed, e.g. Low bed with a drive | |
| DE10394150T5 (en) | Compliant passenger loading bridge to disposition over the wing of an aircraft | |
| DE19840743C2 (en) | Dolly |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: UNKNOWN |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: THE INTERNATIONAL PUBLICATION HAS BEEN MADE |
|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: REQUEST FOR EXAMINATION WAS MADE |
|
| 17P | Request for examination filed |
Effective date: 20190412 |
|
| AK | Designated contracting states |
Kind code of ref document: A1 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| AX | Request for extension of the european patent |
Extension state: BA ME |
|
| DAV | Request for validation of the european patent (deleted) | ||
| DAX | Request for extension of the european patent (deleted) | ||
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: EXAMINATION IS IN PROGRESS |
|
| 17Q | First examination report despatched |
Effective date: 20200714 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: EXAMINATION IS IN PROGRESS |
|
| GRAP | Despatch of communication of intention to grant a patent |
Free format text: ORIGINAL CODE: EPIDOSNIGR1 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: GRANT OF PATENT IS INTENDED |
|
| INTG | Intention to grant announced |
Effective date: 20210818 |
|
| GRAS | Grant fee paid |
Free format text: ORIGINAL CODE: EPIDOSNIGR3 |
|
| GRAA | (expected) grant |
Free format text: ORIGINAL CODE: 0009210 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: THE PATENT HAS BEEN GRANTED |
|
| AK | Designated contracting states |
Kind code of ref document: B1 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| REG | Reference to a national code |
Ref country code: GB Ref legal event code: FG4D Free format text: NOT ENGLISH |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: EP |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R096 Ref document number: 502017012314 Country of ref document: DE |
|
| REG | Reference to a national code |
Ref country code: AT Ref legal event code: REF Ref document number: 1456610 Country of ref document: AT Kind code of ref document: T Effective date: 20220115 |
|
| REG | Reference to a national code |
Ref country code: IE Ref legal event code: FG4D Free format text: LANGUAGE OF EP DOCUMENT: GERMAN |
|
| REG | Reference to a national code |
Ref country code: FI Ref legal event code: FGE Ref country code: NL Ref legal event code: FP |
|
| REG | Reference to a national code |
Ref country code: NO Ref legal event code: T2 Effective date: 20211222 |
|
| REG | Reference to a national code |
Ref country code: SE Ref legal event code: TRGR |
|
| REG | Reference to a national code |
Ref country code: LT Ref legal event code: MG9D |
|
| REG | Reference to a national code |
Ref country code: ES Ref legal event code: FG2A Ref document number: 2906049 Country of ref document: ES Kind code of ref document: T3 Effective date: 20220413 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: RS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20211222 Ref country code: LT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20211222 Ref country code: BG Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20220322 |
|
| REG | Reference to a national code |
Ref country code: SK Ref legal event code: T3 Ref document number: E 39176 Country of ref document: SK |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: LV Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20211222 Ref country code: HR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20211222 Ref country code: GR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20220323 |
|
| REG | Reference to a national code |
Ref country code: HU Ref legal event code: AG4A Ref document number: E057793 Country of ref document: HU |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SM Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20211222 Ref country code: RO Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20211222 Ref country code: PT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20220422 Ref country code: EE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20211222 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R097 Ref document number: 502017012314 Country of ref document: DE |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20220422 |
|
| PLBE | No opposition filed within time limit |
Free format text: ORIGINAL CODE: 0009261 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: NO OPPOSITION FILED WITHIN TIME LIMIT |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: DK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20211222 Ref country code: AL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20211222 |
|
| 26N | No opposition filed |
Effective date: 20220923 |
|
| REG | Reference to a national code |
Ref country code: NO Ref legal event code: MMEP |
|
| P01 | Opt-out of the competence of the unified patent court (upc) registered |
Effective date: 20230524 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MC Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20211222 |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: PL |
|
| REG | Reference to a national code |
Ref country code: SE Ref legal event code: EUG |
|
| REG | Reference to a national code |
Ref country code: NL Ref legal event code: MM Effective date: 20221201 |
|
| GBPC | Gb: european patent ceased through non-payment of renewal fee |
Effective date: 20221127 |
|
| REG | Reference to a national code |
Ref country code: BE Ref legal event code: MM Effective date: 20221130 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: NO Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20221130 Ref country code: LI Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20221130 Ref country code: HU Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20221128 Ref country code: CZ Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20221127 Ref country code: CH Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20221130 |
|
| REG | Reference to a national code |
Ref country code: SK Ref legal event code: MM4A Ref document number: E 39176 Country of ref document: SK Effective date: 20221127 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SI Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20221128 Ref country code: SE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20221128 Ref country code: NL Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20221201 Ref country code: LU Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20221127 |
|
| REG | Reference to a national code |
Ref country code: SI Ref legal event code: KO00 Effective date: 20230713 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IT Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20221127 Ref country code: IE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20221127 Ref country code: GB Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20221127 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SK Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20221127 Ref country code: FR Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20221130 Ref country code: BE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20221130 |
|
| REG | Reference to a national code |
Ref country code: ES Ref legal event code: FD2A Effective date: 20240102 |
|
| REG | Reference to a national code |
Ref country code: AT Ref legal event code: MM01 Ref document number: 1456610 Country of ref document: AT Kind code of ref document: T Effective date: 20221127 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: ES Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20221128 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: ES Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20221128 Ref country code: AT Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20221127 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: DE Payment date: 20231120 Year of fee payment: 7 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R082 Ref document number: 502017012314 Country of ref document: DE Representative=s name: PAGE, WHITE & FARRER GERMANY LLP, DE |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: FI Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20221127 Ref country code: CY Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20211222 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: PL Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20221127 Ref country code: MK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20211222 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: TR Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20221127 Ref country code: MT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20211222 |