EP3470561A1 - Dispositif d'échange de bobines et de tubes pour une ligne de filage - Google Patents
Dispositif d'échange de bobines et de tubes pour une ligne de filage Download PDFInfo
- Publication number
- EP3470561A1 EP3470561A1 EP18199456.7A EP18199456A EP3470561A1 EP 3470561 A1 EP3470561 A1 EP 3470561A1 EP 18199456 A EP18199456 A EP 18199456A EP 3470561 A1 EP3470561 A1 EP 3470561A1
- Authority
- EP
- European Patent Office
- Prior art keywords
- frame side
- exchange device
- spinning
- bobbins
- tubes
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 238000009987 spinning Methods 0.000 title claims abstract description 66
- 238000004140 cleaning Methods 0.000 claims description 18
- 230000001360 synchronised effect Effects 0.000 claims description 3
- 238000000034 method Methods 0.000 description 6
- 238000004804 winding Methods 0.000 description 3
- 230000015572 biosynthetic process Effects 0.000 description 2
- 230000005484 gravity Effects 0.000 description 2
- 238000007664 blowing Methods 0.000 description 1
- 230000001419 dependent effect Effects 0.000 description 1
- 238000010586 diagram Methods 0.000 description 1
- 238000006073 displacement reaction Methods 0.000 description 1
- 238000003780 insertion Methods 0.000 description 1
- 230000037431 insertion Effects 0.000 description 1
- 239000000725 suspension Substances 0.000 description 1
Images














Classifications
-
- D—TEXTILES; PAPER
- D01—NATURAL OR MAN-MADE THREADS OR FIBRES; SPINNING
- D01H—SPINNING OR TWISTING
- D01H9/00—Arrangements for replacing or removing bobbins, cores, receptacles, or completed packages at paying-out or take-up stations ; Combination of spinning-winding machine
- D01H9/02—Arrangements for replacing or removing bobbins, cores, receptacles, or completed packages at paying-out or take-up stations ; Combination of spinning-winding machine for removing completed take-up packages and replacing by bobbins, cores, or receptacles at take-up stations; Transferring material between adjacent full and empty take-up elements
- D01H9/04—Doffing arrangements integral with spinning or twisting machines
-
- D—TEXTILES; PAPER
- D01—NATURAL OR MAN-MADE THREADS OR FIBRES; SPINNING
- D01H—SPINNING OR TWISTING
- D01H9/00—Arrangements for replacing or removing bobbins, cores, receptacles, or completed packages at paying-out or take-up stations ; Combination of spinning-winding machine
- D01H9/18—Arrangements for replacing or removing bobbins, cores, receptacles, or completed packages at paying-out or take-up stations ; Combination of spinning-winding machine for supplying bobbins, cores, receptacles, or completed packages to, or transporting from, paying-out or take-up stations ; Arrangements to prevent unwinding of roving from roving bobbins
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65H—HANDLING THIN OR FILAMENTARY MATERIAL, e.g. SHEETS, WEBS, CABLES
- B65H67/00—Replacing or removing cores, receptacles, or completed packages at paying-out, winding, or depositing stations
- B65H67/06—Supplying cores, receptacles, or packages to, or transporting from, winding or depositing stations
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65H—HANDLING THIN OR FILAMENTARY MATERIAL, e.g. SHEETS, WEBS, CABLES
- B65H2701/00—Handled material; Storage means
- B65H2701/30—Handled filamentary material
- B65H2701/31—Textiles threads or artificial strands of filaments
Definitions
- the bobbins formed at the spindle frame consisting of a tube on which the roving stretched at the roving frame is wound, are transported to the spinning frame.
- the bobbins being worked are located, from which the rovings to be worked start.
- the bobbins being worked are exhausted, they are replaced by the bobbins originating from the spindle frame.
- the exhausted bobbins consist of the tube completely devoid of roving (defined as “empty tube”) or of the tube provided with some windings of roving residues (defined as “dirty tube”).
- the dirty tubes (and sometimes also the empty ones) are cleaned in a special device, usually referred to as "cleaner", which eliminates the residual roving, obtaining empty tubes.
- the empty tubes originating from the cleaner and those removed from the spinning frame are brought back to the roving frame and replaced here with the bobbins which have been formed in the meantime; the empty tubes may thus be reused for the formation of new bobbins.
- the Applicant has devised a further apparatus, object of the Italian patent application for the invention No. 10 2017 000 037 751 , capable of reducing the overall execution times of the removal, exchange and release stages, and possibly of the cleaning one.
- the execution speed of the exchange operations is not the only requirement.
- the exchange device operates between the transport system on the spinning side, which carries the empty or dirty tubes from the spinning machines and to which the bobbins must be released, and the bench side transport system, which carries the bobbins and to which the empty tubes are released.
- the exchange device must correctly interact with the two transport systems, possibly adapting, quickly and reliably, to different constructive parameters thereof.
- the object of the present invention is to meet the above requirements.
- reference numeral 1 overall indicates a portion of a spinning line comprising a can region 2 in which stay a plurality of cans 4, each containing a roll of roving, a spindle frame 6, adjacent to the can region 2 to be fed thereby with the roving, and a plurality of spinning frames 8, for example, arranged parallel to one another, are housed.
- the spindle frame 6 stretches the roving originating from the cans 4 and winds it on empty tubes, forming bobbins 10 to be transported to the spinning frame. To this end, the bobbins 10 are made available to a cart 20 of the spindle frame 6.
- a transport system comprises a roving frame side transport device 22, usually referred to as the "plank”, suitable to remove the bobbins 10 from the cart 20 and to move them in suspension, at a predetermined height, generally by means of a main belt 22' .
- the roving frame side transport device 22 is also suitable to load the cart 20 with empty tubes 14.
- the spindle frame 6, which extends along a spindle frame axis along which working points are distributed in sequence, provides for a pair of flaps 6a for each working point.
- Each flap 6a rotates around a vertical axis, to guide the roving being wound around an empty tube 14, thus forming the spool 10.
- the empty tube 14 is inserted in a removable manner on a spindle 6b integral with the spindle motion cart 20.
- the cart 20 In a working position ( Figure 2 ), the cart 20 is arranged at a height suitable to allow the winding of the roving to the tube, so as to realise the bobbin 10.
- the axes of the spindles carried by the cart 20 are substantially coincident with the axes of the flaps.
- the cart 20 is lowered from the raised working position to a retracted lowered position in which it acts in conjunction with cart motion means for the horizontal translation of the cart towards the advanced raising position, below the plank.
- Said horizontal motion means comprise a slide 6c which acts in conjunction with motor means for the horizontal translation of the cart.
- the cart 20 moves into the advanced raising position suitable to allow the cooperation of said cart 20 with the bobbin carrier plank 22 to raise the bobbins from the cart and/or deposit them on said spindles 6b of new empty tubes 14 for the formation of new bobbins.
- the plank 22 is supported by a sustaining and guiding structure 6d, comprising a vertically movable crosspiece 6e.
- the plank 22 is thus vertically movable between a raised position, in which the motion of the bobbins towards the next working stage occurs, and a lowered position suitable to remove the bobbins from the cart in the raising position.
- the spindle frame 6 comprises support and motion means suitable to sustain said plank and to allow the vertical movement thereof.
- said support and motion means comprise a band 6f, preferably flat, connected, at one end, to the crosspiece 6e and wound, at the opposite end, to a plank motion shaft 6g connected to a motor.
- the transport system further comprises a spinning frame side transport device 26 suitable to move the bobbins 10 towards the spinning frames 8 and the dirty tubes 12 (or sometimes the empty 14 ones) towards the spindle frame 6.
- the spinning frame side transport device 26 is shaped as a closed ring and comprises a track 26' having sections 8' which run parallel to the spinning frames 8, seamlessly.
- control means comprising for example a PLC or a microprocessor, suitable to control the advancement of the bobbins along the plank and the advancement of empty 14 or dirty tubes 12 along the track 26'.
- the spinning line 1 comprises an exchange device 50 suitable to act in conjunction with the roving frame side transport device 22, serving the spindle frame 6, and with the spinning frame side transport device 26, serving the spinning frames 8, to locally carry out, i.e., in a predetermined zone of the transport system, the removal of the dirty tubes 12 from the spinning frame side transport device 26 and of the bobbins 10 from the roving frame side transport device 22, possibly, the cleaning of the dirty tubes 12 to obtain empty tubes 14, the exchange of the bobbins 10 with the empty tubes 14 and the release of the bobbins 10 to the spinning frame side transport device 26 and of the empty tubes 14 to the roving frame side transport device 22.
- an exchange device 50 suitable to act in conjunction with the roving frame side transport device 22, serving the spindle frame 6, and with the spinning frame side transport device 26, serving the spinning frames 8, to locally carry out, i.e., in a predetermined zone of the transport system, the removal of the dirty tubes 12 from the spinning frame side transport device 26 and of the bobbins 10 from the rov
- the exchange device 50 acts in conjunction with an end section 26'' of the track 26' of the spinning frame side transport device 26 serving the spinning frames 8 and with an end section 22'' of the transport belt 22' of the roving frame side transport device 22 serving the spindle frame 6.
- the end section 22" of the belt 22' extends along a direction perpendicular to the end section 26'' of the track 26'.
- the exchange device 50 comprises a peg carrier group 100 comprising an opening drive shaft 52 having an extension along a substantially vertical axis of rotation Z, and a first electric motor 54, preferably arranged at the upper end of the opening drive shaft 52, kinematically connected thereto to drive it in rotation.
- the peg carrier group 100 comprises a rotary drive shaft 56, supported by an abutment 58 which is fixed and rotatable by actuating a second electric motor 55 of the peg carrier group 100.
- the rotary drive shaft 56 is hollow and coaxial with the opening drive shaft 52, which is housed therein, guided in rotation by one or more bearings.
- a drive group 300 comprises a motor carrier plate 302, the first electric motor 54 and the second electric motor 55.
- the motor carrier plate 302 is vertically sliding and supports the first electric motor 54 and the second electric motor 55, arranged side-by-side.
- the motor-carrier group 300 comprises a first adaptor 304 connected to the first electric motor 54, for example, of the type with orthogonal input/output axes, placed in axis with the opening drive shaft 52 and connected thereto.
- the motor-carrier group 300 comprises a second adaptor 306, connected to the second electric motor 55, for example, of the type with orthogonal input/output axes, arranged side-by-side to the first adaptor 304, connected to the rotary drive shaft 56 by means of gears 308, 310.
- the motor-carrier group 300 comprises anti-rotation means suitable to prevent the rotation of the motor carrier plate 302 and to allow, at the same time, the vertical translation of said motor carrier plate 302.
- said anti-rotation means comprise a slide 312 fastened to a fixed abutment, for example a column 314 of the exchange device 50, and a pin 316 fastened to a portion 318 of the motor carrier plate 302, slidable on the slide 312.
- the pin 316 is provided with a roller at the end, to facilitate the sliding on the slide 312.
- the peg carrier group 100 further comprises a plurality of rectilinear radial guides 60, arranged near the lower end of the rotary drive shaft 56, supported thereby; said radial guides 60 radially extend from the rotary drive shaft 56 outwards, each along a respective radial direction R*, and are preferably angularly arranged equally spaced.
- each radial guide 60 is supported by an end portion of the rotary drive shaft 56 and, by means of a bearing 62, by an end portion of the opening drive shaft 52; during the rotation of the opening drive shaft 52, said guides do not, therefore, undergo any displacement, while they rotate around the axis of rotation Z by actuating, in rotation, the rotary drive shaft 56.
- the peg carrier group 100 further comprises, for each radial guide 60, a carriage 64 slidable on the respective radial guide 60, and a return rod 66, hinged at one end distal to the respective carriage 64.
- the peg carrier group 100 comprises a rotary drive member 68, for example, in the form of a star, coaxially and integrally fastened to the opening drive shaft 52, preferably at the lower end thereof.
- Each return rod 66 is hinged, at the respective proximal end, to the rotary drive member 68, at a point off-center with respect to the axis of rotation Z, for example at the points of the star rotary drive member.
- some return rods are hinged to the rotary drive member at the upper face thereof, others are hinged at the lower face, to avoid structural interference.
- some return rods are hinged to the rotary drive member at the upper face thereof, others are hinged at the lower face, to avoid structural interference.
- two of these, relative to two carriages diametrically opposite each other are hinged at the upper face of the rotary drive member, while the other two, relative to the other two carriages diametrically opposite each other, are hinged at the lower face of the rotary drive member.
- the peg carrier group 100 provides for two peg carrier plates 70a, 70b, side-by-side circumferentially and opposite each other, hinged so as to be spreadable.
- said peg carrier plates 70a, 70b are hinged near the axis of rotation Z, for example, at two hinge points 72a, 72b, and are kept close together by the action of elastic means, for example, a spring 74.
- Each plate 70a, 70b carries a respective peg 84a, 84b, suitable for the insertion of a tube 14.
- the carriage 64 provides for two arched slots 76a, 76b, and each peg carrier plate 70a, 70b provides for a pin 78a, 78b which passes through the base of the carriage 64; the spring 74 operates on the two pins 78a, 78b, so as to continuously operate in reciprocal approach.
- the rotation of the opening drive shaft 52 produces the rotation of the rotary drive member 68 and the translation or roto-translation of the return rods 66, which actuate in motion, along the respective radial guide 60, the respective carriage 64, carrying pegs 84a, 84b, for example a pair.
- the rotation in one direction, for example clockwise, of the opening drive shaft 52 produces the exit of the carriages 64 (and of the pegs 84a, 84b) outwards, along the radial direction R*, i.e., a centrifugal motion, while the rotation in the opposite direction, for example counterclockwise, produces the return of the carriages 64 (and of the pegs 84a, 84b) towards the axis of rotation Z, i.e., a centripetal motion.
- the peg carrier group 100 is provided with radial motion means suitable to radially move pegs 84a, 84b.
- said radial motion means comprise the first electric motor 54, the opening drive shaft 52, the radial guides 60, the carriages 64 and the peg carrier plates 70a, 70b.
- the second electric motor 55 and the rotary drive shaft 56 constitute an embodiment of rotary motion means suitable to move the radial guides 64 in rotation around the axis of rotation Z, so as to provide the pairs of pegs 84a, 84b with subsequent angular positions.
- the radial motion means are synchronised, for example, electronically, with the rotary motion means.
- the exchange device 50 comprises synchronization means suitable to synchronise the rotation of the opening drive shaft 52 and the rotation of the rotary drive shaft 56, so that a predetermined rotation of the rotary drive shaft 56 corresponds to an adequate counter-rotation of the opening drive shaft 52, so that the pegs 84a, 84b remain in the same radial position.
- said synchronization means are electronic and provide for the synchronization between the actuation of the second electric motor 55, which drives in rotation the rotary drive shaft 56, and the actuation of the first electric motor 54, which drives in rotation the opening drive shaft 52.
- the exchange device 50 provides for spreading means operating in a predetermined angular position, preferably corresponding to the angular position in which said exchange device 50 acts in conjunction with the spinning frame side transport system 26, and, for this reason, referred to as spinning frame side angular position, suitable to operate on the pair of peg carrier plates 70a, 70b arranged in said spinning frame side angular position, to spread them circumferentially during the translation along the radial direction R*.
- each peg carrier plate 70a, 70b provides for a preferably through slit 80a, 80b; said slits 80a, 80b extend radially along respective spreading axis D1, D2, diverging outwards.
- the spreading means comprise a pair of spreading pins 82a, 82b supported by a flange 84 mounted coaxially with the rotary drive shaft 56.
- the spreading pins 82a, 82b are positioned so as to be engageable with the respective slit 80a, 80b.
- the peg carrier plates 70a, 70b are brought closer by virtue of the action of the elastic means, and the spreading pins 82a, 82b are located in the respective slits 80a, 80b, at the external radial end thereof.
- the peg carrier plates 70a, 70b spread apart, since the spreading pins 82a, 82b, engaged in the respective slits 80a, 80b having a divergent course, guide said peg carrier plates 70a, 70b in reciprocal circumferential distancing, overcoming the resistance of the elastic means.
- the peg carrier plates 70a, 70b are in the spreading limit position, which corresponds to a predetermined limit distance between the pegs 84a, 84b carried by said peg carrier plates 70a, 70b; by modifying the shape and/or the size of the components of the spreading means and/or of the slits, it is possible to record the limit distance between the pegs 84a, 84b.
- this allows to overcome any differences between the distance between the tubes carried by the spinning frame side transport device and the distance between the bobbins carried by the roving frame side transport device or to overcome any differences between the distance between the tubes carried by the spinning frame side transport device for different spinning frame models or to overcome any differences between the distance between the bobbins carried by the roving frame side transport device for different spindle frame models.
- the exchange device 50 further comprises vertical motion means suitable to put the peg carrier group 100 in translation, along a vertical direction, parallel to the axis of rotation Z.
- Said vertical motion means are preferably electric and comprise, for example, a third electric motor 90, for example a stepper motor, fastened to a fixed abutment.
- said vertical motion means comprise a kinematic chain which kinematically engages the third electric motor 90 with the peg carrier group 100, to put it in vertical translation in accordance with the rotation imparted by said third electric motor 90.
- the kinematic chain engages the rotary drive shaft 56 and comprises, for example:
- the actuation of the vertical motion means produces the raising or the lowering of the entire peg carrier group 100, also comprising the motor-carrier group 300, and therefore the first electric motor 54 and the second electric motor 55.
- the peg carrier group 100 is movable between a lower limit position and an upper limit position.
- the spreading means are disengaged from the peg carrier plates 70a, 70b, so that the actuation of the radial motion means causes the radial advancement of the peg carrier plates 70a, 70b, without these being spread apart, not even those arranged in the spinning frame side angular position.
- the peg carrier group 100 Passing from the lower limit position to the upper limit position, the peg carrier group 100 passes through an intermediate position in which the spreading means engage the peg carrier plates 70a, 70b, so that the actuation of the radial motion means in one direction corresponds to an advancement of the peg carrier plates 10a, 70b and, for the peg carrier plates 70a, 70b located in the spinning frame side angular position, also a spreading, i.e., a reciprocal circumferential distancing.
- the spreading means are synchronised with the vertical motion means, so as to engage the peg carrier plates 70a, 70b at a predetermined intermediate position, when it is moving from the lower limit position to the upper limit position, possibly in said upper limit position.
- the peg carrier group 100 passes through the intermediate position in which the spreading means disengage the peg carrier plates 70a, 70b.
- the flange 84 which carries the spreading pins 82a, 82b is supported by a collar 102, mounted coaxially to the rotary drive shaft 56 and slidable thereon.
- said locking system 110 comprises a small rod 112 vertically fastened to the flange 84, and a locking plate 114 fastened to the fixed frame 93, slidably crossed by the small rod 112.
- the small rod 112 provides, at the upper free end, for a bush which abuts against the locking plate 114 when the flange is in the intermediate position, thus preventing the flange 84 from going below said intermediate position.
- said locking system 110 also performs the function of locking the rotation of the flange 84, necessary to counteract the action exerted by the peg carrier plates 70a, 70b during the radial advancement.
- said locking system is an example of rotation locking means of said spreading means.
- the roving frame side transport device 22 carries two bobbins 10, hanged by means of a respective hooking/releasing device, generally referred to as the "pendulum"; the two bobbins 10 stop in a bobbin removal position such that the respective axes define an imaginary bobbin exchange plane Pb, substantially perpendicular to the advancement direction of the bobbins along the roving frame side transport device 22.
- the angular position facing the bobbin exchange plane Pb, in which said exchange device 50 acts in conjunction with the roving frame side transport device 22, is defined roving frame side angular position.
- the spinning frame side transport device 26 carries two dirty 12 or empty tubes 14, hanged by means of respective hooking/releasing devices; the tubes 12, 14 stop in a tube removal position in which they are aligned on an imaginary tube transport plane Pt, on which the advancement direction of the tubes along the spinning frame side transport device 26 also lies.
- the angular position facing the tube transport plane Pt, in which said exchange device 50 acts in conjunction with the spinning frame side transport device 26, is the spinning frame side angular position mentioned above.
- the peg carrier group 100 moves vertically upwards by actuating the vertical motion means and engages the spreading means in the intermediate position.
- the pegs 84a, 84b By actuating the radial motion means, the pegs 84a, 84b radially move outwards up to an advanced radial limit position; the pegs 84a, 84b placed in the spinning frame side angular position, in addition to moving externally radially, spread apart.
- the pegs 84a, 84b arranged in the roving frame side angular position, when reaching the advanced radial limit position, have not undergone any spreading and are vertically aligned to the bobbins 10 to be removed, i.e., aligned on the bobbin exchange plane Pb, while the pegs 84a , 84b arranged in the spinning frame side angular position, when reaching the respective advanced radial limit position, are spread apart and vertically aligned to the dirty 12 or empty tubes 14 to be removed, i.e., aligned on the tube transport plane Pt ( Figure 11a ).
- the pegs 84a, 84b in the spinning frame side angular position engage the dirty 12 or empty tubes 14, and the pegs 84a, 84b in the roving frame side angular position engage the bobbins 10, and by raising a little beyond an engagement height, they release said bobbins 10 and said tubes 12, 14 from the respective hooking/releasing devices.
- the peg carrier group 100 returns to the lower limit position, bringing the bobbins 10 and the tubes 12, 14 therewith.
- the radial guides 60 undergo a rotation, for example, in the clockwise direction, so that the tubes 12, 14 are brought in an intermediate spinning frame/roving frame angular position between the spinning frame side angular position and the roving frame side angular position, for example, rotated by 90° with respect to said spinning frame side angular position ( Figure 11c ).
- the exchange device 50 comprises a cleaning device 200 suitable to operate on the tubes 12, 14 arranged in said intermediate angular position, on a plurality of tubes simultaneously, for example on two.
- the bobbins 10 are brought in an intermediate roving frame/spinning frame angular position between the roving frame side angular position and the spinning frame side angular position, for example, rotated by 90° with respect to said roving frame side angular position.
- the roving frame side transport device 22 advances by a first stroke C1.
- Said first stroke C1 is such that two hooking/releasing devices are positioned on the bobbin exchange plane Pb.
- the tubes (possibly cleaned) pass from the spinning frame/roving frame angular position to the roving frame side angular position and the bobbins pass from the roving frame/spinning frame angular position to the spinning frame side angular position ( Figure 11d ).
- the actuation of the radial motion means and of the vertical motion means brings the bobbins placed in the spinning frame side angular position to be hanged to the spinning frame side transport device 26, with a spreading due to the action of the spreading means, and the tubes placed in the roving frame side angular position to be hanged to the roving frame side transport device 22.
- the cleaning operation is possibly started for other two tubes, which, in the meantime, have reached the spinning frame/roving frame angular position.
- the roving frame side transport device 22 advances the bobbins carried by the plank 22 by a second stroke C2, so that two further bobbins 10, between which an empty hooking/releasing device is conventionally arranged, are arranged on the bobbin exchange plane Pb.
- the second stroke C2 is greater than the first stroke C1, since the first stroke C1 allows the alignment of two hooking/releasing devices on the bobbin exchange plane Pb, one of which is close to the desired position, while the second stroke C2 allows the positioning of two following bobbins on the bobbin exchange plane Pb.
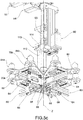
- spinning frame side transport device 26 advances by a third stroke C3, so that two other dirty tubes 12 are ready for the spinning frame side removal ( Figure 11e ).
- said control means comprise plank motion means suitable to advance the plank by a predetermined stroke, which varies according to the operating stage of the exchange device 50.
- plank motion means are suitable to make the plank 22 advance by a first stroke C1 to align two hooking/releasing devices on the bobbin exchange plane Pb, and to make the plank 22 advance by a second stroke C2 to align two bobbins 10 on the bobbin exchange plane Pb.
- the further motion of the vertical motion means allows to load the other two tubes 12, 14 on the pegs placed in the spinning frame side angular position and the other two bobbins on the pegs placed in the roving frame side angular position.
- the exchange device 50 comprises a cleaning device 200 suitable to operate on at least one dirty tube 12 to eliminate the roving residues.
- said cleaning device 200 is suitable to operate on several dirty tubes (12) simultaneously, for example in a number of two.
- said cleaning device 200 is configured to operate on said dirty tubes 14 when arranged in an intermediate angular position, between a first angular position of cooperation with the spinning frame side transport device and a second angular position of cooperation with the roving frame side transport device.
- said cleaning device operates said cleaning pneumatically, i.e., carrying out an air blowing or suction, so as to separate the roving residues from the tube.
- the cleaning device 200 is described, according to an embodiment, in International Application WO 2016/083944 and in the Italian patent application for the invention No. 10 2017 000 037 751 , both in the name of the Applicant, of which the teachings in relation to such cleaning device is incorporated herein as a reference.
- FIGS 12 to 14 show a further embodiment of the invention; in such Figures, the same reference numerals are used to identify the same components.
- the anti-rotation means of the motor carrier group 300 suitable to prevent the rotation of the motor carrier plate 302 and to allow, at the same time, the vertical translation of said motor carrier plate 302, comprise a window 312', having a vertical extension, made in the column 314 of the exchange device 50, and a tab 316' of the motor carrier plate 302, slidable in the window 312'.
- the tab 316' is provided, at the end thereof, with a roller 316", to facilitate the sliding in the window 312'.
- the kinematic chain of the vertical motion means comprises at least one belt 92', preferably a pair of belts 92', being wound by the third electric motor 90 and fastened to the peg carrier group 100, for example fastened to the motor carrier group 300, preferably to the motor carrier plate 302.
- the actuation of the third electric motor 90 leads to the winding of the belts 92' and to the raising of the peg carrier group 100, while the release of the motor 90 leads to the lowering of the peg carrier group 100 by gravity.
- the exchange device described above meets the requirements referred to with reference to the prior art, since it interfaces correctly both with the spinning-frame transport system and with the bench-side transport system.
- the exchange device allows overcoming the different distances possibly existing between the tubes carried by the spinning-frame transport device and the bobbins carried by the bench-side transport device.
- the exchange device allows reducing the overall time necessary for the exchange of the bobbins with the tubes, and possibly the cleaning of the dirty tubes.
- the use of electric motors for the radial motion means and the rotary motion means allows the peg carrier group to be always rotated in the same direction, to the advantage of the operation of the exchange device.
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Textile Engineering (AREA)
- Spinning Or Twisting Of Yarns (AREA)
- Replacing, Conveying, And Pick-Finding For Filamentary Materials (AREA)
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| IT102017000116289A IT201700116289A1 (it) | 2017-10-16 | 2017-10-16 | Dispositivo di scambio fra bobine e tubetti per una linea di filatura |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| EP3470561A1 true EP3470561A1 (fr) | 2019-04-17 |
| EP3470561B1 EP3470561B1 (fr) | 2022-03-23 |
Family
ID=61224335
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP18199456.7A Active EP3470561B1 (fr) | 2017-10-16 | 2018-10-09 | Dispositif d'échange de bobines et de tubes pour une ligne de filage |
Country Status (5)
| Country | Link |
|---|---|
| EP (1) | EP3470561B1 (fr) |
| JP (1) | JP7245023B2 (fr) |
| CN (1) | CN109666997B (fr) |
| ES (1) | ES2916423T3 (fr) |
| IT (1) | IT201700116289A1 (fr) |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN111691019B (zh) * | 2020-05-27 | 2022-03-25 | 浙江新昌高歌纺织有限公司 | 一种纱线加捻用高效捻线机 |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP0259267A2 (fr) * | 1986-08-30 | 1988-03-09 | Howa Machinery Limited | Procédé pour échanger des bobines de mèche et dispositif pour sa mise en oeuvre |
| US5715669A (en) * | 1994-11-30 | 1998-02-10 | Kabushiki Kaisha Toyoda Jidoshokki Seisakusho | Bobbin transporting system for roving and spinning machines with apparatus to exchange bobbins of differing pitches |
| EP0855456A2 (fr) * | 1997-01-22 | 1998-07-29 | Zinser Textilmaschinen GmbH | Procédé et appareil pour transporter des bobines pleines de ruban de fibres respectivement des tubes vides pour le ruban de fibres |
| JPH1121020A (ja) * | 1997-07-07 | 1999-01-26 | Toyota Autom Loom Works Ltd | 粗糸ボビン搬送方法及び粗糸ボビン搬送システム |
| WO2016083944A1 (fr) | 2014-11-25 | 2016-06-02 | MARZOLI MACHINES TEXTILE S.r.l. | Dispositif intégré et procédé de transport de bobines et de tubes entre un banc à broches et un métier à filer d'une ligne de filage |
Family Cites Families (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2513200B2 (ja) * | 1986-12-18 | 1996-07-03 | 株式会社豊田自動織機製作所 | 精紡機等における空ボビン位置決め方法 |
| DE4214001C1 (de) * | 1992-04-29 | 1993-12-23 | Innovatex Automatisierungstech | Verfahren und Vorrichtung zum Ver- und Entsorgen eines Flyers mit Leerhülsen bzw. von Vollspulen |
| JP3114429B2 (ja) * | 1993-06-01 | 2000-12-04 | 株式会社豊田自動織機製作所 | 粗糸替機の粗糸垂れ防止装置 |
| JP4900044B2 (ja) * | 2007-05-28 | 2012-03-21 | 株式会社豊田自動織機 | 精紡機におけるボビン搬送装置 |
| DE102012005374B4 (de) * | 2012-03-16 | 2023-09-28 | Maschinenfabrik Niehoff Gmbh & Co Kg | Spulenwechselvorrichtung |
-
2017
- 2017-10-16 IT IT102017000116289A patent/IT201700116289A1/it unknown
-
2018
- 2018-10-09 EP EP18199456.7A patent/EP3470561B1/fr active Active
- 2018-10-09 ES ES18199456T patent/ES2916423T3/es active Active
- 2018-10-12 JP JP2018193749A patent/JP7245023B2/ja active Active
- 2018-10-16 CN CN201811203593.6A patent/CN109666997B/zh active Active
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP0259267A2 (fr) * | 1986-08-30 | 1988-03-09 | Howa Machinery Limited | Procédé pour échanger des bobines de mèche et dispositif pour sa mise en oeuvre |
| US5715669A (en) * | 1994-11-30 | 1998-02-10 | Kabushiki Kaisha Toyoda Jidoshokki Seisakusho | Bobbin transporting system for roving and spinning machines with apparatus to exchange bobbins of differing pitches |
| EP0855456A2 (fr) * | 1997-01-22 | 1998-07-29 | Zinser Textilmaschinen GmbH | Procédé et appareil pour transporter des bobines pleines de ruban de fibres respectivement des tubes vides pour le ruban de fibres |
| JPH1121020A (ja) * | 1997-07-07 | 1999-01-26 | Toyota Autom Loom Works Ltd | 粗糸ボビン搬送方法及び粗糸ボビン搬送システム |
| WO2016083944A1 (fr) | 2014-11-25 | 2016-06-02 | MARZOLI MACHINES TEXTILE S.r.l. | Dispositif intégré et procédé de transport de bobines et de tubes entre un banc à broches et un métier à filer d'une ligne de filage |
Also Published As
| Publication number | Publication date |
|---|---|
| CN109666997B (zh) | 2022-06-24 |
| EP3470561B1 (fr) | 2022-03-23 |
| ES2916423T3 (es) | 2022-07-01 |
| CN109666997A (zh) | 2019-04-23 |
| IT201700116289A1 (it) | 2019-04-16 |
| JP7245023B2 (ja) | 2023-03-23 |
| JP2019073843A (ja) | 2019-05-16 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP3470560B1 (fr) | Dispositif d'échange de bobines et de tubes dans une ligne de filage | |
| CN107405662B (zh) | 矫直机和用于更换矫直辊子元件的方法 | |
| CA1297663C (fr) | Dispositif servant a installer un manchon de bobinage | |
| EP3470561B1 (fr) | Dispositif d'échange de bobines et de tubes pour une ligne de filage | |
| JP2022137041A (ja) | 紡績ラインの粗紡機と精紡機との間でボビンとチューブを移動させる装置と方法 | |
| CZ201847A3 (cs) | Zařízení pro manipulaci s cívkou, způsob dopravy cívky, obslužné zařízení prstencového spřádacího stroje a prstencový spřádací stroj | |
| DE19631445A1 (de) | Vorspinnmaschine mit Spulenwechselvorrichtung | |
| ITMI981819A1 (it) | Dispositivo caricatore di spole su un supporto a piattello per il loro trasporto e posizionamento nelle macchine tessili | |
| US2399934A (en) | Container fabricating machine | |
| CN117779245A (zh) | 一种纺织机械原料上料结构 | |
| EP0919505A1 (fr) | Dispostif de bobinage en particulier pour fils textiles | |
| KR960014594B1 (ko) | 직기의 급사체 교환장치 및 교환방법 | |
| US2716326A (en) | Doffing and donning apparatus | |
| GB955837A (en) | Improvements in and relating to doffing and donning devices for textile spinning machines | |
| US1639968A (en) | Doffing mechanism for spinning, doubling, twisting, and like machines | |
| CN117303068B (zh) | 一种多功能验布机 | |
| US1457593A (en) | Doffing mechanism for spinning and like machines | |
| US1127674A (en) | Doffer. | |
| JPH09111551A (ja) | 繊維機械、特にテクスチャリング機械による糸の加工処理後に、糸を巻いたボビンを取り出す装置 | |
| US1590865A (en) | Doffing mechanism for flier spinning, dourling, and like machines | |
| US1142013A (en) | Doffing-machine for spinning-frames. | |
| SU922198A1 (ru) | Устройство дл сн ти початков и насадки патронов на веретена пр дильных и крутильных машин | |
| MX2015002071A (es) | Unidad de mandril conico con anillo guia externo. | |
| US1124672A (en) | Spinning-machine. | |
| EP2985249A2 (fr) | Dispositif d'enroulement de rouleaux avec et sans noyau |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: THE APPLICATION HAS BEEN PUBLISHED |
|
| AK | Designated contracting states |
Kind code of ref document: A1 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| AX | Request for extension of the european patent |
Extension state: BA ME |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: REQUEST FOR EXAMINATION WAS MADE |
|
| 17P | Request for examination filed |
Effective date: 20191009 |
|
| RBV | Designated contracting states (corrected) |
Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| GRAP | Despatch of communication of intention to grant a patent |
Free format text: ORIGINAL CODE: EPIDOSNIGR1 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: GRANT OF PATENT IS INTENDED |
|
| INTG | Intention to grant announced |
Effective date: 20211102 |
|
| GRAS | Grant fee paid |
Free format text: ORIGINAL CODE: EPIDOSNIGR3 |
|
| GRAA | (expected) grant |
Free format text: ORIGINAL CODE: 0009210 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: THE PATENT HAS BEEN GRANTED |
|
| AK | Designated contracting states |
Kind code of ref document: B1 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| REG | Reference to a national code |
Ref country code: GB Ref legal event code: FG4D |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R083 Ref document number: 602018032564 Country of ref document: DE |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: PK Free format text: BERICHTIGUNGEN Ref country code: CH Ref legal event code: EP |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R096 Ref document number: 602018032564 Country of ref document: DE |
|
| REG | Reference to a national code |
Ref country code: IE Ref legal event code: FG4D |
|
| REG | Reference to a national code |
Ref country code: AT Ref legal event code: REF Ref document number: 1477497 Country of ref document: AT Kind code of ref document: T Effective date: 20220415 |
|
| RIN2 | Information on inventor provided after grant (corrected) |
Inventor name: VAVASSORI, PAOLO Inventor name: ASSENZA, ROSARIO |
|
| REG | Reference to a national code |
Ref country code: ES Ref legal event code: FG2A Ref document number: 2916423 Country of ref document: ES Kind code of ref document: T3 Effective date: 20220701 |
|
| REG | Reference to a national code |
Ref country code: LT Ref legal event code: MG9D |
|
| REG | Reference to a national code |
Ref country code: NL Ref legal event code: MP Effective date: 20220323 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20220323 Ref country code: RS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20220323 Ref country code: NO Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20220623 Ref country code: LT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20220323 Ref country code: HR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20220323 Ref country code: BG Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20220623 |
|
| REG | Reference to a national code |
Ref country code: AT Ref legal event code: MK05 Ref document number: 1477497 Country of ref document: AT Kind code of ref document: T Effective date: 20220323 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: LV Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20220323 Ref country code: GR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20220624 Ref country code: FI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20220323 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: NL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20220323 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SM Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20220323 Ref country code: SK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20220323 Ref country code: RO Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20220323 Ref country code: PT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20220725 Ref country code: EE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20220323 Ref country code: CZ Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20220323 Ref country code: AT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20220323 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: PL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20220323 Ref country code: IS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20220723 Ref country code: AL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20220323 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R097 Ref document number: 602018032564 Country of ref document: DE |
|
| PLBE | No opposition filed within time limit |
Free format text: ORIGINAL CODE: 0009261 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: NO OPPOSITION FILED WITHIN TIME LIMIT |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: DK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20220323 |
|
| 26N | No opposition filed |
Effective date: 20230102 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20220323 Ref country code: MC Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20220323 |
|
| REG | Reference to a national code |
Ref country code: BE Ref legal event code: MM Effective date: 20221031 |
|
| GBPC | Gb: european patent ceased through non-payment of renewal fee |
Effective date: 20221009 |
|
| P01 | Opt-out of the competence of the unified patent court (upc) registered |
Effective date: 20230523 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: LU Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20221009 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20220323 Ref country code: FR Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20221031 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: BE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20221031 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20221009 Ref country code: GB Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20221009 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: ES Payment date: 20231102 Year of fee payment: 6 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: DE Payment date: 20231020 Year of fee payment: 6 Ref country code: CH Payment date: 20231102 Year of fee payment: 6 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: HU Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT; INVALID AB INITIO Effective date: 20181009 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: CY Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20220323 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20220323 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: TR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20220323 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20220323 |