EP3446302B1 - Method, device and arrangement for tracking moving objects - Google Patents
Method, device and arrangement for tracking moving objects Download PDFInfo
- Publication number
- EP3446302B1 EP3446302B1 EP16726841.6A EP16726841A EP3446302B1 EP 3446302 B1 EP3446302 B1 EP 3446302B1 EP 16726841 A EP16726841 A EP 16726841A EP 3446302 B1 EP3446302 B1 EP 3446302B1
- Authority
- EP
- European Patent Office
- Prior art keywords
- information
- group
- tracking
- data
- vehicle
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000000034 method Methods 0.000 title claims description 21
- 238000004891 communication Methods 0.000 claims description 42
- 101001137642 Homo sapiens Kinase suppressor of Ras 1 Proteins 0.000 claims description 39
- 102100021001 Kinase suppressor of Ras 1 Human genes 0.000 claims description 39
- 101000636109 Homo sapiens Ras suppressor protein 1 Proteins 0.000 claims description 33
- 102100030800 Ras suppressor protein 1 Human genes 0.000 claims description 33
- 101100367236 Saccharomyces cerevisiae (strain ATCC 204508 / S288c) SVS1 gene Proteins 0.000 claims description 16
- 238000011156 evaluation Methods 0.000 claims description 16
- 101100367237 Rattus norvegicus Svs2 gene Proteins 0.000 claims description 15
- 101100454130 Saccharomyces cerevisiae (strain ATCC 204508 / S288c) KSS1 gene Proteins 0.000 claims description 11
- 238000011157 data evaluation Methods 0.000 claims description 8
- 238000012544 monitoring process Methods 0.000 claims description 7
- 238000001514 detection method Methods 0.000 description 34
- 230000005540 biological transmission Effects 0.000 description 32
- 101100233916 Saccharomyces cerevisiae (strain ATCC 204508 / S288c) KAR5 gene Proteins 0.000 description 15
- 101100012902 Saccharomyces cerevisiae (strain ATCC 204508 / S288c) FIG2 gene Proteins 0.000 description 10
- 238000012545 processing Methods 0.000 description 6
- 101001121408 Homo sapiens L-amino-acid oxidase Proteins 0.000 description 4
- 102100026388 L-amino-acid oxidase Human genes 0.000 description 4
- 241001465754 Metazoa Species 0.000 description 3
- 238000013459 approach Methods 0.000 description 3
- 230000000694 effects Effects 0.000 description 3
- 238000012986 modification Methods 0.000 description 3
- 230000004048 modification Effects 0.000 description 3
- 238000007405 data analysis Methods 0.000 description 2
- 230000007547 defect Effects 0.000 description 2
- 238000005259 measurement Methods 0.000 description 2
- 230000036961 partial effect Effects 0.000 description 2
- XLYOFNOQVPJJNP-UHFFFAOYSA-N water Substances O XLYOFNOQVPJJNP-UHFFFAOYSA-N 0.000 description 2
- 241001136792 Alle Species 0.000 description 1
- 240000003517 Elaeocarpus dentatus Species 0.000 description 1
- 230000006399 behavior Effects 0.000 description 1
- 238000007796 conventional method Methods 0.000 description 1
- 230000003247 decreasing effect Effects 0.000 description 1
- 230000001419 dependent effect Effects 0.000 description 1
- 238000011161 development Methods 0.000 description 1
- 230000018109 developmental process Effects 0.000 description 1
- 238000005516 engineering process Methods 0.000 description 1
- 238000009434 installation Methods 0.000 description 1
- 230000001788 irregular Effects 0.000 description 1
- 230000004807 localization Effects 0.000 description 1
- 230000007774 longterm Effects 0.000 description 1
- 230000036962 time dependent Effects 0.000 description 1
Images




Classifications
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/01—Detecting movement of traffic to be counted or controlled
- G08G1/0104—Measuring and analyzing of parameters relative to traffic conditions
- G08G1/0108—Measuring and analyzing of parameters relative to traffic conditions based on the source of data
- G08G1/0112—Measuring and analyzing of parameters relative to traffic conditions based on the source of data from the vehicle, e.g. floating car data [FCD]
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/01—Detecting movement of traffic to be counted or controlled
- G08G1/0104—Measuring and analyzing of parameters relative to traffic conditions
- G08G1/0108—Measuring and analyzing of parameters relative to traffic conditions based on the source of data
- G08G1/0116—Measuring and analyzing of parameters relative to traffic conditions based on the source of data from roadside infrastructure, e.g. beacons
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/01—Detecting movement of traffic to be counted or controlled
- G08G1/0104—Measuring and analyzing of parameters relative to traffic conditions
- G08G1/0125—Traffic data processing
- G08G1/0133—Traffic data processing for classifying traffic situation
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/01—Detecting movement of traffic to be counted or controlled
- G08G1/0104—Measuring and analyzing of parameters relative to traffic conditions
- G08G1/0137—Measuring and analyzing of parameters relative to traffic conditions for specific applications
- G08G1/0141—Measuring and analyzing of parameters relative to traffic conditions for specific applications for traffic information dissemination
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/01—Detecting movement of traffic to be counted or controlled
- G08G1/015—Detecting movement of traffic to be counted or controlled with provision for distinguishing between two or more types of vehicles, e.g. between motor-cars and cycles
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/20—Monitoring the location of vehicles belonging to a group, e.g. fleet of vehicles, countable or determined number of vehicles
Definitions
- the invention relates to a method for tracking moving objects according to the preamble of patent claim 1 and an arrangement for tracking moving objects according to the preamble of patent claim 9.
- the tracking and tracing of objects moving in space is a possible area of application for the use of navigation systems, such as the Global Positioning System (GPS) or GALILEO system, to support control or monitoring systems (e.g. traffic control centers in the traffic control).
- GPS Global Positioning System
- GALILEO Global Positioning System
- GPS-based systems with GPS receivers and/or ground stations assigned to the moving objects for receiving the satellite signals transmitted by the GPS satellites orbiting the earth.
- one-way distance measurements time-synchronous measurements of the propagation times of the satellite signals are each multiplied by the GPS receiver during triangulation (taking into account the signals from three satellites) or quadrangulation (taking into account the signals from four satellites). the speed of light).
- Such systems include "Intelligent Transport Systems (ITS)” in which road traffic-related data is recorded, transmitted, processed and used for the purposes of traffic telematics using information and communication technologies in order to provide information about traffic and to organize and control it and/or direct. If such data is exchanged on the one hand between the individual road users (e.g. car drivers, cyclists, pedestrians, etc.) and on the other hand between the road user and the traffic infrastructure (e.g. existing traffic facilities) - this is also referred to as V2X communication ("Vehicle to X "-Communication) - it is a cooperative ITS in which a V2X communication unit is assigned to each road user and each traffic facility.
- ITS Intelligent Transport Systems
- the V2X communication unit is arranged in the vehicle of the road user as a vehicle-independent, separate "On Board Unit (OBU)" in the vehicle or is already integrated in the on-board electronics of the vehicle or if the user is a pedestrian in traffic , is carried by the road user, e.g. as a PDA device (Personal Digital Assistant) similar to a mobile phone or smartphone, and that the traffic system contains the V2X communication unit as a retrofit kit or as an integral part.
- OBU On Board Unit
- the term "cooperative" is used because the ITS supports road users in their traffic-related tasks. For example, in dangerous situations in traffic and helping to avoid accidents. All this takes place through mutual communication between road users, who constantly exchange information and warnings in real time. Each road user communicates its own status to all other V2X receivers regularly, for example about ten times per second.
- This status message (status information) is sent by the V2X communication unit used by the road user as a motorist, cyclist or pedestrian with the specified periodicity of approx. 10 times per second and can then be received by all other road users as well as by the infrastructure, ie the traffic facilities, are received with the help of V2X communication units.
- the status regularly transmitted with the status message is anonymized, i.e. the use of the (pseudonymous) identity identifier (ID, IDentifier) and the (pseudonymous ) message certificate identifier (certificate ID) is essentially rendered unusable. This happens in such a way that, for example, the identity identifier (ID, IDentifier) and/or the certificate ID is changed at intervals of approx. 1 minute.
- FIGURE 1 shows a cooperative ITS scenario in relation to a traffic road VKS shown in sections, preferably in the form of a motorway, on which a vehicle FZ (in the illustrated FIGURE 1 is this a bus vehicle, for example; but it could also be another vehicle, such as a car, truck, motorcycle, bicycle, etc.) in a direction of movement (direction of travel) BWR at different times t1, t2, t3, each on a stationary "road side unit”RSU' Road device SV' passes.
- the vehicle FZ thus passes a first "road side unit”RSU1' at time t1, a second "road side unit”RSU2' at time t2 and a third "road side unit”RSU3' at time t3.
- the road device SV′ or the “road side unit” RSU′, RSU1′, RSU2′, RSU3′ can be any technical system that belongs to the traffic infrastructure, controls the traffic and/or provides information about the traffic and/or a device designed for this purpose be an electronic device which preferably - as already mentioned above - is capable of V2X communication.
- the road devices SV′ or the “road side units” RSU1′, RSU2′, RSU3′ are passed by the vehicle FZ along a detection section EFS of the traffic road VKS.
- the vehicle FZ sends or emits information IF at regular time intervals, for example every 100 ms, preferably via a radio signal, that it is to be detected.
- the vehicle FZ has an information transmission device ISE, which is preferably embodied as the V2X communication unit and is again integrated into the on-board electronics of the vehicle (e.g. if the vehicle is a "non-legacy vehicle") or as a vehicle-independent, separate device (e.g. if the vehicle is a "legacy vehicle”).
- This information IF contains according to the table below FIGURE 1 (Tabel- FIG1 ) a large number of parameter data PD belonging to information parameters.
- these information parameters or parameter data PD are referred to as object-identifying information parameters or parameter data PD - as well as ( ii ) information parameters and associated parameter data PD by the vehicle FZ, in which the information transmission device ISE is the transmission source of the information IF is located, characterized, labeled, typed, etc., but not clearly identified and whose data values do not undergo any change - these information parameters or parameter data PD are referred to below as non-object-identifying information parameters or parameter data PD.
- the object-identifying information parameters or parameter data PD are marked with a gray shading, while the non-object-identifying information parameters or parameter data PD have no background shading (e.g. with regard to gray gradation and/or pattern) (white background in the table- FIG1 ).
- the table table- FIG1 illustrates how the object-identifying parameter data PD at time t3 have changed compared to the object-identifying parameter data PD at times t1, t2.
- the vehicle FZ with the information transmission device ISE emitting the information IF enters or drives into an information acquisition area IEB of an information acquisition device IEE in the road device SV' or the "road side unit" RSU', RSU1', RSU2', RSU3', at the times t1, t2, t3, the information IF emitted by the information transmission device ISE with the parameter data PD is recorded by the information recording device IEE.
- the information detection range IEB reaches its maximum extent when the information IF emitted by the information transmission device ISE can no longer be received by the information detection device IEE.
- the object on which the invention is based is to specify a method, a device and an arrangement for tracking moving objects, in which the track of the objects - without the use of object-identifying information, e.g. GPS information of the object or other individual identifiers by which an object is fundamentally identifiable or if the objects constantly change their identity - can be traced.
- object-identifying information e.g. GPS information of the object or other individual identifiers by which an object is fundamentally identifiable or if the objects constantly change their identity - can be traced.
- the idea on which the invention is based is how - with reference to the present proposal for a method, a device and an arrangement for tracking moving objects - on the basis of the multiple times along a tracking route, in particular at different locations at different times, taking place acquisition of information with non-object-identifying parameter data, which are emitted by the moving objects, preferably at regular time intervals, through object-group-specific observations of the acquired parameter data, group-specific data profiles obtained from these observations and a data profile similarity comparison, a statement about the successful tracking with regard to at least one Receives part of the object group along the tracking route and generates tracking information in this regard, which is not generated if no such statement is possible.
- ITS status messages ITS status information obtained several times, in particular at different locations and at different times if these are anonymized, determine a traffic flow over longer distances.
- a so-called “group footprint” footprint of a vehicle group driving past a "V2X Road Side Unit” (e.g. a first "Road Side Unit” RSU1).
- This "group footprint” can then be used along the route, downstream, by further "V2X-Road Side Units” (e.g. a second "Road Side Unit” RSU2 and/or a third "Road Side Unit” RSU3) to define the vehicle group to identify.
- V2X-Road Side Units e.g. a second "Road Side Unit” RSU2 and/or a third "Road Side Unit” RSU3
- vehicles it is possible for vehicles to send other optional data elements in the status report that can be used to identify a vehicle group.
- FIGURE 2 shows starting from the in the FIGURE 1 ITS scenario shown is a first extended cooperative ITS scenario for tracking at least one vehicle from a large number of vehicles FZ1, FZ2, FZ3 moving on the traffic road or the VKS motorway, in which a statement on tracking is obtained in a central unit .
- the road device SV or the "Road Side Unit” RSU1, RSU2 can again be any technical system belonging to the traffic infrastructure, controlling the traffic and/or providing information about the traffic and/or an electronic device designed for this purpose, which preferably - such as already mentioned above - is V2X communication capable.
- the road devices SV or the "road side units” RSU1, RSU2 are passed along a first track following section SVS1 of the traffic road VKS by the column of vehicles.
- the first tracking section SVS1 is also a detection section at the same time, because each vehicle FZ1, FZ2, FZ3 in the convoy at regular time intervals, for example every 100 ms, preferably has information IF FZ1 , IF FZ2 , IF FZ3 corresponding to the vehicle transmits or emits a radio signal that needs to be detected.
- each vehicle FZ1, FZ2, FZ3 has a vehicle-corresponding information transmission device ISE FZ1 , ISE FZ2 , ISE FZ3 , preferably designed as the V2X communication unit, which is also integrated into the on-board electronics of the vehicle (e.g.
- Each piece of information of this vehicle-corresponding information IF FZ1 , IF FZ2 , IF FZ3 contains according to the tables below FIGURE 2 ( Table-1- FIG2 , Table-2- FIG2 , Table-3- FIG2 ,) a large number of vehicle-corresponding parameter data PD FZ1 , PD FZ2 , PD FZ3 belonging to information parameters.
- the table-1- FIG2 shows the information IF FZ1 emitted by the vehicle FZ1 with the associated parameter data PD FZ1
- Table 2 FIG2 the information IF FZ2 emitted by the vehicle FZ2 with the associated parameter data PD FZ2
- Table 3 FIG2 show the information IF FZ3 emitted by the vehicle FZ3 with the associated parameter data PD FZ3 .
- these information parameters or parameter data PD FZ1 , PD FZ2 , PD FZ3 are also used as object-identifying information parameters or parameter data PD FZ1 , PD FZ2 , PD FZ3 referred to - and (ii) information parameters and associated parameter data PD FZ1 , PD FZ2 , PD FZ3 by the respective vehicle FZ1, FZ2, FZ3, in the vehicle-corresponding information transmission device ISE FZ1 , ISE FZ2 , ISE FZ3 as Transmission source of the information IF FZ1 , IF FZ2 , IF FZ3 is characterized, marked, typed e tc., but is not clearly identified and whose data values are not changed - these information parameters or parameter data PD FZ1 , PD FZ2 , PD FZ3 are referred to below as non-object-identifying information parameters or parameter data PD FZ1 , PD FZ2 , PD FZ3
- the object-identifying information parameters or parameter data PD FZ1 , PD FZ2 , PD FZ3 are again marked with gray shading, while the non-object-identifying information parameters or parameter data PD FZ1 , PD EZ2 , PD FZ3 again have no background shading (e.g. with regard to gray gradation and/or or pattern) (white background in the mentioned tables).
- the tables mentioned each illustrate how the object-identifying parameter data PD FZ1 , PD FZ2 , PD FZ3 have changed at time t2 compared to the object-identifying parameter data PD FZ1 , PD FZ2 , PD FZ3 at time t1.
- the vehicles FZ1, FZ2, FZ3 of the convoy with the vehicle-corresponding information IF FZ1 , IF FZ2 , IF FZ3 emitting information transmission devices ISE FZ1 , ISE FZ2 , ISE FZ3 are in a first information detection area IEB1 of a first information detection device IEE1 of the modified first "Road Side Unit" RSU1, the information transmission facilities ISE FZ1 , ISE FZ2 , ISE FZ3 of the vehicles FZ1, FZ2, FZ3 at the time t1 emitted information IF FZ1,t1 , IF FZ2,t1 , IF FZ3,t1 with parameter data PD FZ1,t1 , PD FZ2,t1 , PD FZ3, t1 is detected by the first information detection device IEE1.
- the first information acquisition area IEB1 reached - analogous to the information acquisition area IEB in the FIGURE 1 - Its maximum extent when the information emitted by information transmission device ISE FZ1 , ISE FZ2 , ISE FZ3 IF FZ1 , IF FZ2 , IF FZ3 can no longer be received by the first information detection device IEE1.
- cooperative ITS scenario in the extended cooperative ITS scenario to be able to track at least one vehicle of the vehicle convoy FZ1, FZ2, FZ3, are carried out by a first group GR1 of the vehicles FZ1, FZ2, FZ3, which several vehicles with the proviso " The greater their number in the group, the easier it is to correlate the different parameter data from information detection areas", comprising first information IF1 with first parameter data PD1 from the information IF FZ1,t1 , IF FZ2,t1 , IF FZ3,t1 at time t1 with the parameter data PD FZ1,t1 , PD FZ2,t1 , PD FZ3,t1 maximum predetermined amount of information recorded.
- the catalog of criteria mentioned above should be used when selecting the parameters.
- the information IF FZ1,t1 , IF FZ2,t1 , IF FZ3,t1 emitted by the vehicles FZ1, FZ2, FZ3 at the time t1 with the parameter data PD FZ1,t1 , PD FZ2,t1 , PD FZ3,t1 are the first items of information IF1 with the first parameter data PD1 due to the registration association of the named vehicles at time t1 with the first group GR1.
- the first information acquisition device IEE1 is now designed in such a way, preferably by means of common data processing (e.g. a hardware unit based on a microprocessor and memory component and on the hardware unit as software operable and executable program modules) that from the acquired first parameter data PD1, a data profile DP GR1 specific to the first group, in particular a group footprint or group stamp of the vehicle group, is generated.
- common data processing e.g. a hardware unit based on a microprocessor and memory component and on the hardware unit as software operable and executable program modules
- This first group-specific data profile DP GR1 is then transmitted in the modified first "road side unit" RSU1 from the first information acquisition device IEE1 to a first communication interface KSS1, which is connected to the first information acquisition device IEE1 and which receives the first group-specific data profile DP GR1 from the first information acquisition device IEE1 for provides a data analysis based on a similarity comparison of data profiles. How, when and where this data profile similarity comparison takes place is explained below in connection with the description of the FIGURE 2 explained.
- the convoy of vehicles continues to move along the first tracking section SVS1 on the traffic road or the VKS motorway. Since the vehicles FZ1, FZ2, FZ3 are traveling in the convoy at a comparable speed and if neither of the vehicles leaves the road or the VKS motorway - e.g. for a stop at a gas station or service area or to continue driving on another road - another one of the vehicles due to vehicle defect, e.g.
- the road side units "RSU1, RSU2 with the two information acquisition areas IEB1, IBE2 are arranged separately from each other at an arbitrarily selectable distance.
- the second information acquisition area IEB2 also reaches again - analogous to the information acquisition area IEB in FIGURE 1 and first information detection area IEB1 - its maximum extent when the information IF FZ1 , IF FZ2 , IF FZ3 emitted by the information transmission device ISE FZ1 , ISE FZ2 , ISE FZ3 can no longer be received by the second information detection device IEE2.
- the information IF FZ1, t2 , IF FZ2, t2 , IF FZ3, t2 emitted by the vehicles FZ1, FZ2, FZ3 at time t2 with the parameter data PD FZ1, t2 , PD FZ2, t2 , PD FZ3, t2 are due to the acquisition association of the mentioned vehicles at time t2 to the second group GR2 the second information IF2 with the second parameter data PD2.
- the second information acquisition device IEE2 - like the first information acquisition device IEE1 - is designed in this way, preferably again by means of generally customary means for data processing (e.g. a hardware unit based on a microprocessor and memory component and a program that can be operated and executed as software on the hardware unit Modules) that a second group-specific data profile DP GR2 , in particular a group footprint or group stamp of the vehicle group, is generated from the detected second parameter data PD2.
- data processing e.g. a hardware unit based on a microprocessor and memory component and a program that can be operated and executed as software on the hardware unit Modules
- This two-group-specific data profile DP GR2 is then transmitted in the modified second "road side unit" RSU2 from the second information acquisition device IEE2 to a second communication interface KSS2, which is connected to the second information acquisition device IEE2 and which receives the second-group-specific data profile DP GR2 received from the second information acquisition device IEE2 for provides a data analysis based on a similarity comparison of data profiles.
- the two data profiles DP GR1 , DP GR2 are now available for this data profile similarity comparison.
- the communication interfaces KSS1, KSS2 are connected to the evaluation device AWE, with the connection being able to be wireless or wired, for example.
- the evaluation device AWE is now designed in such a way, preferably using generally customary means for data processing Comparing two variables (e.g. a hardware unit based on a microprocessor and memory component and program modules that can be operated and executed as software on the hardware unit) that the second-group-specific data profile DP GR2 provided by the second communication device KSS2 with that provided by the first communication device KSS1 for Provided first-group-specific data profile DP GR1 is compared by parameter data, in particular from a combination of the parameter data PD1, PD2 within the groups GR1, GR2.
- two variables e.g. a hardware unit based on a microprocessor and memory component and program modules that can be operated and executed as software on the hardware unit
- parameter data in particular from a combination of the parameter data PD1, PD2 within the groups GR1, GR2.
- the evaluation device AWE produces or generates tracking information SVI and forwards this information to a central monitoring instance ZÜI, preferably designed as a traffic control center, to which the evaluation device AWE is connected, e.g. wirelessly or by wire. Otherwise, if the agreement between the parameter data PD1, PD2 is not so great, no such statement is possible and the tracking information SVI is not generated.
- the tracking information SVI can preferably be used for broadcasting traffic news or for cooperative ITS traffic systems or traffic telematics systems.
- FIGURE 3 shows starting from the in the FIGURE 1 illustrated ITS scenario a second extended cooperative ITS scenario for tracking at least one vehicle from a large number of vehicles FZ4...FZ10 moving on the traffic road or the motorway VKS, in which a statement on tracking is obtained in a local unit.
- the road device SV or the “Road Side Unit” RSU1, RSU2, RSU3 can again be any technical system that belongs to the traffic infrastructure, controls the traffic and/or provides information about the traffic and/or an electronic device designed for this purpose, which preferably - as already mentioned above - is capable of V2X communication.
- the road devices SV or the "road side units" RSU1, RSU2, RSU3 are thereby passed along a second track following section SVS2 of the traffic road VKS by the three vehicle columns.
- the second tracking route SVS2 is also a detection route, because each vehicle FZ4 ... FZ10 in the three vehicle columns at regular time intervals, for example every 100ms, a vehicle-corresponding information IF FZ4 ... IF FZ10 preferably via a radio signal or emits that it is to be recorded.
- each vehicle FZ4...FZ10 has a vehicle-corresponding information transmission device ISE FZ4 ...ISE FZ10 , preferably designed as the V2X communication unit, which is again integrated into the on-board electronics of the vehicle (e.g. if the vehicle is a "non-legacy vehicle") or as a vehicle-independent, separate device (e.g. if the vehicle is a "legacy vehicle").
- Each piece of information of this vehicle-corresponding information IF FZ4 ... IF FZ10 contains according to the tables below FIGURE 3 ( Table-1- FIG3 to Table-7- FIG3 ,) a large number of vehicle-corresponding parameter data PD FZ4 . . . PD FZ10 belonging to information parameters.
- the table-1- FIG3 shows the information IF FZ4 emitted by the vehicle FZ4 with the associated parameter data PD FZ4
- Table 2 shows the information IF FZ5 emitted by the vehicle FZ5 with the associated parameter data PD FZ5
- Table 3 shows the information IF FZ6 emitted by the vehicle FZ6 with the associated parameter data PD FZ6
- Table 4 shows the information IF FZ7 emitted by the vehicle FZ7 with the associated parameter data PD FZ7
- Table 5 shows the information IF FZ8 emitted by the vehicle FZ8 with the associated parameter data PD FZ8
- Table 6 shows the information IF FZ9 emitted by the vehicle FZ9 with the associated parameter data PD FZ9
- Table 7- FIG3 shows the information IF FZ10 emitted by the vehicle FZ10 with the associated parameter data PD FZ10 .
- the object-identifying information parameters or parameter data PD FZ4 ...PD FZ10 are again marked with a gray shading, while the non-object-identifying information parameters or parameter data PD FZ4 ...PD FZ10 again have no background shading (e.g. with regard to gray gradation and/or patterns ) (white background in the mentioned tables).
- the tables mentioned each illustrate how the object-identifying parameter data PD FZ4 ... PD FZ10 at the respective points in time t2, t3 have changed compared to the object-identifying parameter data PD FZ4 ... PD FZ10 at point in time t1.
- the first information acquisition area IEB1 reaches again - analogously to the information acquisition area IEB in FIG FIGURE 1 - Its maximum extent when the information IF FZ4 , IF FZ5 , IF FZ6 , IF FZ7 emitted by the information transmission device ISE FZ4 , ISE FZ5 , ISE FZ6 , ISE FZ7 can no longer be received by the first information detection device IEE1.
- the two vehicles FZ6, FZ7 form the first group GR1 because, although the vehicle type is the same here, contrary to the catalog of criteria, e.g. the speed of the vehicles mentioned is comparable and the prerequisite is that the time stamps of the vehicles mentioned are at the same time and the position of the detected vehicles is adjacent (as it is in the FIGURE 3 shown in principle ).
- the information IF FZ6,t1 , IF FZ7,t1 emitted by the vehicles FZ6, FZ7 at the time t1 with the parameter data PD FZ6,t1 , PD FZ7,t1 are the first items of information IF1 with the first parameter data PD1 due to the registration association of the named vehicles at time t1 with the first group GR1.
- the first information acquisition device IEE1 is now again designed in such a way, preferably by means of generally customary means for data processing (e.g. a hardware unit based on a microprocessor and memory component and program modules that can be operated and executed as software on the hardware unit), that detected first parameter data PD1 again the first group-specific data profile DP GR1 , in particular the group footprint or group stamp of the vehicle group, is generated.
- data processing e.g. a hardware unit based on a microprocessor and memory component and program modules that can be operated and executed as software on the hardware unit
- This first group-specific data profile DP GR1 is then transmitted again in the modified first "road side unit" RSU1 from the first information acquisition device IEE1 to the first communication interface KSS1, which is connected to the first information acquisition device IEE1 and which receives the first group-specific data profile DP GR1 received from the first information acquisition device IEE1 for a data evaluation based on a similarity comparison of data profiles. How, when and where this data profile similarity comparison takes place is explained below in connection with the description of the FIGURE 3 explained.
- the first vehicle convoy FZ4, FZ5, FZ6, FZ7 is moving further along the second tracking section SVS2 on the traffic road or the VKS motorway.
- the vehicles FZ4, FZ5, FZ6, FZ7 in the convoy are traveling at different speeds, the first convoy of vehicles along the second tracking section SVS2 will break up and be reduced to vehicles with a comparable speed.
- the vehicles FZ6, FZ7, which as part of the convoy of the first Motorcade form the first group GR1. It can therefore be assumed that if neither one of these vehicles leaves the road or the VKS motorway - e.g.
- the convoy with the vehicles FZ6, FZ7 now approaches the second "Road Side Unit" RSU2, and for the second convoy of vehicles, in addition to the two vehicles FZ6, FZ7 mentioned, there is also the vehicle FZ8 with the vehicle-corresponding information IF FZ6 , IF FZ7 , IF FZ8 emitting vehicle-corresponding information transmission device ISE FZ6 , ISE EZ7 , ISE FZ8 in the second information detection area IEB2 of the second information detection device IEE2 of the second "Road Side Unit” RSU2, the information transmission devices ISE EZ6 , ISE EZ7 , ISE FZ8 of the vehicles FZ6, FZ7, FZ8 at time t2 emitted information IF FZ6,t2 , IF FZ7,t2 , IF FZ8,t2 with parameter data PD FZ6,t2 , PD FZ7,t2 , PD FZ8,t2 captured by the second information capture device IEE2.
- the Road Side Units" RSU1, RSU2 with the two information acquisition areas IEB1, IBE2 are again arranged separately from each other at an arbitrarily selectable distance.
- the second information acquisition area IEB2 also reaches again—similar to the information acquisition area IEB in FIG FIGURE 1 and first information detection area IEB1 - its maximum extent when the information IF FZ6 , IF FZ7 , IF FZ8 emitted by the information transmission device ISE EZ6 , ISE EZ7 , ISE FZ8 can no longer be received by the second information detection device IEE2 .
- the two vehicles FZ6, FZ7 also form the second group GR2 because, although the vehicle type is the same, contrary to the catalog of criteria, eg the speed of the vehicles mentioned is comparable and the condition is met that the time stamps of the vehicles mentioned are at the same time and the position of the recorded vehicles is adjacent (as it is in the FIGURE 3 shown in principle ).
- the information IF FZ6,t2 , IF FZ7, t2 emitted by the vehicles FZ6, FZ7 at the time t2 with the parameter data PD FZ6,t2 , PD FZ7,t2 are the second group GR2 due to the registration association of the named vehicles at the time t2 second information IF2 with the second parameter data PD2.
- the second information acquisition device IEE2 - like the first information acquisition device IEE2 - is again designed in this way, preferably again using generally customary means for data processing (e.g. a hardware unit based on a microprocessor and memory component and which can be operated and executed as software on the hardware unit Program modules) that the two-group-specific data profile DP GR2 , in particular the group footprint or group stamp of the vehicle group, is generated from the detected second parameter data PD2.
- generally customary means for data processing e.g. a hardware unit based on a microprocessor and memory component and which can be operated and executed as software on the hardware unit Program modules
- This second-group-specific data profile DP GR2 is then transmitted again in the modified second "Road Side Unit" RSU2 from the second information acquisition device IEE2 to the second communication interface KSS2, which is connected to the second information acquisition device IEE2 and which receives the second-group-specific data profile DP GR2 from the second information acquisition device IEE2 for a data evaluation based on a similarity comparison of data profiles.
- the third information recording area IEB3 with the third information recording device IEE3 is, with regard to this comparison, a further second information recording area IEB2 with a further second information recording device IEE2, the for a further second group GR2 of vehicles further second information IF2 recorded with further second parameter data PD2.
- the following explanations, which relate to the collection of information at the third point in time t3, are to be classified.
- the road side units "RSU1, RSU2, RSU3 with the respective two information acquisition areas IEB1, IBE2 are again arranged separately from one another at an arbitrarily selectable distance.
- the other second information acquisition area IEB2 (IEB3) also reaches again - analogously to the information acquisition area IEB in FIGURE 1 , the first information acquisition area IEB1 and the second information detection area IEB2 - its maximum extent when the information IF FZ6 , IF FZ7 , IF FZ9 , IF FZ10 emitted by the information transmission device ISE FZ6 , ISE FZ7 , ISE FZ9 , ISE FZ10 is transmitted by the further second information detection device IEE2 (IEE3) can no longer be received.
- the two vehicles FZ6, FZ7 also form the other second group GR2 because, although the vehicle type is the same contrary to the list of criteria, for example the speed of the vehicles mentioned is still comparable and the The prerequisite is that the time stamps of the named vehicles are at the same time and the position of the recorded vehicles is adjacent (as it is in the FIGURE 3 shown in principle ).
- the information IF FZ6,t3 , IF FZ7,t3 with the parameter data PD FZ6,t3 , PD FZ7, t3 emitted by the vehicles FZ6, FZ7 at the time t3 is due to the recording association of the named vehicles at the time t3 with the other second group GR2 the further second information IF2 with the further second parameter data PD2.
- the further second information acquisition device IEE2 - like the first information acquisition device IEE1 and the second information acquisition device IEE2 - is again configured in this way, preferably again using generally customary means for data processing (e.g. a hardware unit based on a microprocessor and memory component and on the Hardware unit as software operable and executable program modules) that the further second group-specific data profile DP GR2 , in particular the group footprint or group stamp of the vehicle group, is generated from the detected further second parameter data PD2.
- generally customary means for data processing e.g. a hardware unit based on a microprocessor and memory component and on the Hardware unit as software operable and executable program modules
- This further second-group-specific data profile DP GR2 is then sent again in the modified third "road side unit" RSU3 from the further second information acquisition device IEE2 to a third communication interface KSS3, which by definition is another second communication interface KSS2, which is connected to the further second information acquisition device IEE2 and which makes available the further second group-specific data profile DP GR2 received from the further second information acquisition device IEE2 for a data evaluation based on a similarity comparison of data profiles.
- the first data profile DP GR1 via the first communication interface KSS1 in the first "Road Side Unit” RSU1 via a wireless or wired connection for example, to the second communication interface KSS2 in the second "Road Side Unit” RSU2 or to the other second communication interface KSS2 is transmitted in the third "Road Side Unit” RSU3 and the second communication interface KSS2 in the second "Road Side Unit” RSU2 then the two data profiles DP GR1 , DP GR2 of the evaluation device AWE in the second "Road Side Unit” RSU2 for the data profile similarity comparison to be carried out or the other second communication interface KSS2 in the third "Road Side Unit” RSU3 then supplies the two data profiles DP GR1 , DP GR2 to the evaluation device AWE in the third "Road Side Unit” RSU3 supplies for the data profile similarity comparison to be carried out.
- the evaluation device AWE is again designed in such a way to carry out the data profile similarity comparison, preferably again using generally available means for data processing-supported comparisons of two variables (e.g. a hardware unit based on a microprocessor and memory component and on the hardware unit as software operable and executable program modules) that the provided second-group-specific data profile DP GR2 is compared with the provided first-group-specific data profile DP GR1 in terms of parameter data, in particular from a combination of the parameter data PD1, PD2 within the groups GR1, GR2.
- two variables e.g. a hardware unit based on a microprocessor and memory component and on the hardware unit as software operable and executable program modules
- the respective evaluation device AWE generates or generates the tracking information SVI in the first "road side unit” RSU1, in the second "road side unit” RSU2 or in the second “road side unit” RSU3 and forwards this information to the preferably central monitoring instance ZÜI further trained as a traffic control center, with which the evaluation device AWE, for example wirelessly or wired, is connected. Otherwise, if the agreement between the parameter data PD1, PD2 is not so great, no such statement is possible and the tracking information SVI is not generated.
- the tracking information SVI can then preferably be used again for broadcasting traffic news or used for cooperative actual traffic systems or traffic telematics systems.
- FIGURE 4 shows based on the extended Cooperative ITS scenario for tracking according to the FIGURE 2 the influence of dynamically changing affiliations of nine vehicles FZ01 ... FZ09 driving on the traffic route or the VKS motorway in the direction of movement BWR - a first vehicle FZ01, a second vehicle FZ02, a third vehicle FZ03, a fourth vehicle FZ04, a fifth Vehicle FZ05, a sixth vehicle FZ06, a seventh vehicle FZ07, an eighth vehicle FZ08 and a ninth vehicle FZ09 - to the first group GR1 in relation to the first "Road Side Unit" with the first information acquisition area IEB1 RSU1 and to the second group GR2 in relation on the first "Road Side Unit” with the first information acquisition area IEB2 RSU2 on the at the Vehicle tracking according to the FIGURE 2 similarity comparison to be carried out (correlation check).
- the vehicles FZ5, FZ6, FZ8, FZ9 belong to the first group GR1 at an nth point in time t n at an (n+1)th point in time t n+1 the vehicles FZ2, FZ4, FZ5, FZ6, FZ7 and (n+2)-th point in time t n+2 the vehicles FZ1, FZ2, FZ3, FZ4.
- the vehicles FZ6, FZ7, FZ8 belong to the second group GR2 at an mth point in time tm and at an ( m +1)th point in time tm +1 the vehicles FZ2, FZ4, FZ5, FZ7.
- GR1 t n FZ5 , car 6 _ , car 8th _ , car 9
Description
Die Erfindung bezieht sich auf ein Verfahren zur Spurverfolgung von sich bewegenden Objekten gemäß dem Oberbegriff des Patentanspruches 1 und eine Anordnung zur Spurverfolgung von sich bewegenden Objekten gemäß dem Oberbegriff des Patentanspruches 9.The invention relates to a method for tracking moving objects according to the preamble of
Die Spurverfolgung (engl. tracking and tracing) von sich im Raum bewegenden Objekten, wie beispielsweise sich in Bezug auf Land, Luft und Wasser bewegenden Fahrzeugen jeglicher Art (z.B. Kraft-, Schienen-, Luft- und Wasserfahrzeuge, Fahrrad etc.) und sich bewegende Lebewesen (z.B. Mensch und Tier) ist neben der Zielführung der genannten Objekte ein mögliches Anwendungsgebiet für den Einsatz von Navigationssystemen, wie z.B. dem Global Positioning System (GPS) oder GALILEO-System, zur Unterstützung von Leit- oder Überwachungssystemen (z.B. Verkehrsleitzentralen bei der Verkehrssteuerung).The tracking and tracing of objects moving in space, such as vehicles of any kind moving in relation to land, air and water (e.g. motor vehicles, rail vehicles, air and water vehicles, bicycles, etc.) and themselves moving creatures (e.g. humans and animals) is a possible area of application for the use of navigation systems, such as the Global Positioning System (GPS) or GALILEO system, to support control or monitoring systems (e.g. traffic control centers in the traffic control).
Dementsprechend weit verbreitet sind GPS-basierte Systeme mit den sich bewegenden Objekten zugeordneten GPS-Empfängern und/oder Bodenstationen zum Empfangen der von den die Erde umkreisenden GPS-Satelliten ausgesendeten Satellitensignale. Zur Ermittlung des jeweiligen Objektstandortes (Positionsbestimmung) mittels Funkortung werden bei der Triangulierung (Berücksichtigung der Signale von drei Satelliten) oder Quadrangulierung (Berücksichtigung der Signale von vier Satelliten) von dem GPS-Empfänger Einweg-Entfernungsmessungen (Zeitsynchrone Messungen der Laufzeiten der Satellitensignale jeweils multipliziert mit der Lichtgeschwindigkeit) durchgeführt.Accordingly widespread are GPS-based systems with GPS receivers and/or ground stations assigned to the moving objects for receiving the satellite signals transmitted by the GPS satellites orbiting the earth. To determine the respective object location (position determination) by means of radio locating, one-way distance measurements (time-synchronous measurements of the propagation times of the satellite signals are each multiplied by the GPS receiver during triangulation (taking into account the signals from three satellites) or quadrangulation (taking into account the signals from four satellites). the speed of light).
Neben dieser satellitengestützten Spurverfolgung der genannten, sich bewegenden Objekten gibt es auch terrestrische funkbasierte Systeme, mit denen sich die Spur von sich bewegenden Objekte der genannten Art grundsätzlich verfolgen ließen.In addition to this satellite-based tracking of the moving objects mentioned, there are also terrestrial radio-based systems with which the track of moving objects can be tracked Objects of the type mentioned could be tracked in principle.
Zu solchen Systemen zählen "Intelligent-Transport-Systems (ITS)", bei denen zu Zwecken der Verkehrstelematik mittels Informations- und Kommunikationstechnologien straßenverkehrsbezogene Daten erfasst, übermittelt, verarbeitet und genutzt werden, um über den Verkehr zu informieren und diesen zu organisierten, zu steuern und/oder zu lenken. Werden solche Daten einerseits zwischen den einzelnen Verkehrsteilnehmern (z.B. Kfz-Fahrer, Fahrradfahrer, Fußgänger etc.) und andererseits zwischen dem Verkehrsteilnehmer und der Verkehrsinfrastruktur (z.B. Bestand an Verkehrsanlagen) ausgetauscht - man spricht dann auch von einer V2X-Kommunikation ("Vehicle to X"-Kommunikation) -, so handelt es sich um ein kooperatives ITS, bei dem jedem Verkehrsteilnehmer und jeder Verkehrsanlage eine V2X-Kommunikationseinheit zugeordnet ist. Diese Zuordnung sieht so aus, dass in dem Fahrzeug des Verkehrsteilnehmers die V2X-Kommunikationseinheit als fahrzeugunabhängige, separate "On Board Unit (OBU)" in dem Fahrzeug angeordnet oder bereits in der Bordelektronik des Fahrzeugs integriert ist oder, wenn dieser als Fußgänger am Verkehr teilnimmt, von dem Verkehrsteilnehmer, z.B. als PDA-Gerät (Personal Digital Assistant) analog zum Handy oder Smartphone, mitgeführt wird und dass in der Verkehrsanlage die V2X-Kommunikationseinheit als Nachrüstsatz oder als integraler Bestandteil enthalten ist.Such systems include "Intelligent Transport Systems (ITS)" in which road traffic-related data is recorded, transmitted, processed and used for the purposes of traffic telematics using information and communication technologies in order to provide information about traffic and to organize and control it and/or direct. If such data is exchanged on the one hand between the individual road users (e.g. car drivers, cyclists, pedestrians, etc.) and on the other hand between the road user and the traffic infrastructure (e.g. existing traffic facilities) - this is also referred to as V2X communication ("Vehicle to X "-Communication) - it is a cooperative ITS in which a V2X communication unit is assigned to each road user and each traffic facility. This assignment is such that the V2X communication unit is arranged in the vehicle of the road user as a vehicle-independent, separate "On Board Unit (OBU)" in the vehicle or is already integrated in the on-board electronics of the vehicle or if the user is a pedestrian in traffic , is carried by the road user, e.g. as a PDA device (Personal Digital Assistant) similar to a mobile phone or smartphone, and that the traffic system contains the V2X communication unit as a retrofit kit or as an integral part.
Die Bezeichnung "Kooperativ" wird deshalb verwendet, weil das ITS den Verkehrsteilnehmer bei seinen verkehrsbezogenen Aufgaben unterstützt. So z.B. bei gefährlichen Situationen im Verkehr und dabei Unfälle vermeiden zu helfen. Alles dies erfolgt durch gegenseitige Kommunikation der Verkehrsteilnehmer, die dadurch ständig Informationen und Warnungen in Echtzeit austauschen. Jeder Verkehrsteilnehmer teilt regelmäßig, z.B. ca. zehnmal pro Sekunde, seinen eigenen Zustand an alle anderen V2X-Empfänger mit. Dies geschieht z.B. in Form von Nachrichten (Informationen) - auch als Statusnachrichten (Statusinformationen) bezeichnet - mit objektidentifizierenden bzw. fahrzeugidentifizierenden Informationsparametern, wie z.B. (pseudonymer) Identitätskennung (ID, IDentifier) und (pseudonymer) Nachrichtenzertifikatkennung (Zertifikat-ID), sowie mit nichtobjektidentifizierenden bzw. nichtfahrzeugidentifizierenden Informationsparametern, die z.B. Position, Zeitstempel, Fahrtrichtung, Geschwindigkeit, Fahrzeugtyp, etc. angeben. Diese Statusnachricht (Statusinformation) wird von der durch den Verkehrsteilnehmer als Kfz- oder FahrradFahrer oder als Fußgänger genutzte V2X-Kommunikationseinheit mit der angegebenen Periodizität von ca. 10-mal pro Sekunde gesendet und kann dann sowohl von allen anderen Verkehrsteilnehmern als auch von der Infrastruktur, d.h. den Verkehrsanlagen, mit Hilfe von V2X-Kommunikationseinheiten empfangen werden.The term "cooperative" is used because the ITS supports road users in their traffic-related tasks. For example, in dangerous situations in traffic and helping to avoid accidents. All this takes place through mutual communication between road users, who constantly exchange information and warnings in real time. Each road user communicates its own status to all other V2X receivers regularly, for example about ten times per second. This happens, for example, in the form of messages (information) - also as status messages (Status information) referred to - with object-identifying or vehicle-identifying information parameters, such as (pseudonymous) identity identifier (ID, IDentifier) and (pseudonymous) message certificate identifier (certificate ID), as well as with non-object-identifying or non-vehicle-identifying information parameters, such as position, time stamp, direction of travel, Specify speed, vehicle type, etc. This status message (status information) is sent by the V2X communication unit used by the road user as a motorist, cyclist or pedestrian with the specified periodicity of approx. 10 times per second and can then be received by all other road users as well as by the infrastructure, ie the traffic facilities, are received with the help of V2X communication units.
Mit dem derartig ausgestalteten kooperativen ITS könnte man jetzt grundsätzlich die Spur eines jeden Verkehrsteilnehmers verfolgen und dadurch Aussagen über den örtlichen Verkehrsfluss gewinnen. Allerdings wird aus datenschutzrechtlichen Gründen und um die Personen im Fahrzeug oder die Person als Fußgänger nicht verfolgbar zu machen, der mit der Statusnachricht (Statusinformation) regelmäßig übermittelte Zustand anonymisiert, d.h. die Nutzung der (pseudonymen) Identitätskennung (ID, IDentifier) und der (pseudonymen) Nachrichtenzertifikatkennung (Zertifikat-ID) wird im Prinzip unbrauchbar gemacht. Dies passiert derart, dass beispielsweise im Abstand von ca. 1 Minute die Identitätskennung (ID, IDentifier) und/oder die Zertifikat-ID geändert wird.With the cooperative ITS designed in this way, one could basically follow the lane of every road user and thus gain information about the local traffic flow. However, for data protection reasons and in order to make it impossible to trace the people in the vehicle or the person as a pedestrian, the status regularly transmitted with the status message (status information) is anonymized, i.e. the use of the (pseudonymous) identity identifier (ID, IDentifier) and the (pseudonymous ) message certificate identifier (certificate ID) is essentially rendered unusable. This happens in such a way that, for example, the identity identifier (ID, IDentifier) and/or the certificate ID is changed at intervals of approx. 1 minute.
Durch die Anonymisierung der gesendeten Statusnachrichten (Statusinformationen) und des unregelmäßigen Identitätswechsels (z.B. ca. 1 Minute) ist es nicht mehr zuverlässig möglich, Verkehrsinformationen an unterschiedlichen Orten entlang einer Strecke für die Spurverfolgung (vgl.
Von einer Erfassungsstrecke ist deshalb die Rede, weil das Fahrzeug FZ in regelmäßigen Zeitabständen, z.B. alle 100ms, eine Information IF vorzugsweise via ein Funksignal aussendet bzw. emittiert, dass es zu erfassen gilt. Das Fahrzeug FZ weist dazu eine vorzugsweise als die V2X-Kommunikationseinheit ausgebildete Informationssendeeinrichtung ISE auf, die auch wieder in die Bordelektronik des Fahrzeugs integriert ist (z.B., wenn das Fahrzeug ein "non-legacy vehicle" ist) oder aber als fahrzeugunabhängiges, separates Gerät (z.B., wenn das Fahrzeug ein "legacy vehicle" ist). Diese Information IF enthält gemäß der nachfolgenden Tabelle zu der 
Bei den Informationsparametern und den dazu korrespondierenden Parameterdaten PD wird unterschieden zwischen (i) Informationsparametern und dazu gehörenden Parameterdaten PD durch die die Informationssendeeinrichtung ISE als Sendequelle der Information IF und somit letztlich auch das Fahrzeug FZ eindeutig identifiziert wird und deren Datenwerte wie bereits vorstehend angegeben zu Anonymisierungszwecken laufend, in regelmäßigen Zeitabständen (z.B. im Bereich von ca. 1 Minute) geändert werden - im Weiteren werden diese Informationsparameter bzw. Parameterdaten PD als objektidentifizierende Informationsparametern bzw. Parameterdaten PD bezeichnet - sowie (ii) Informationsparametern und dazu gehörenden Parameterdaten PD durch die das Fahrzeug FZ, in dem sich die Informationssendeeinrichtung ISE als Sendequelle der Information IF befindet, charakterisiert, gekennzeichnet, typisiert etc., aber nicht eindeutig identifiziert wird und deren Datenwerte keine Änderung erfahren - im Weiteren werden diese Informationsparameter bzw. Parameterdaten PD als nichtobjektidentifizierende Informationsparameter bzw. Parameterdaten PD bezeichnet.With the information parameters and the corresponding parameter data PD, a distinction is made between (i) information parameters and the associated parameter data PD through which the information transmission device ISE as the transmission source of the information IF and thus ultimately also the vehicle FZ is clearly identified and their data values, as already stated above, for anonymization purposes continuously, at regular time intervals (e.g. in the range of approx. 1 minute) - hereinafter these information parameters or parameter data PD are referred to as object-identifying information parameters or parameter data PD - as well as ( ii ) information parameters and associated parameter data PD by the vehicle FZ, in which the information transmission device ISE is the transmission source of the information IF is located, characterized, labeled, typed, etc., but not clearly identified and whose data values do not undergo any change - these information parameters or parameter data PD are referred to below as non-object-identifying information parameters or parameter data PD.
In der besagten Tabelle-
Sobald das Fahrzeug FZ mit der die Information IF emittierenden Informationssendeeinrichtung ISE in einen Informationserfassungsbereich IEB einer Informationserfassungseinrichtung IEE in der Straßenvorrichtung SV' bzw. der "Road Side Unit" RSU', RSU1', RSU2', RSU3' eintritt bzw. einfährt, wird zu den Zeitpunkten t1, t2, t3 die von der Informationssendeeinrichtung ISE emittierte Information IF mit den Parameterdaten PD von der Informationserfassungseinrichtung IEE erfasst. Der Informationserfassungsbereich IEB erreicht seine maximale Ausdehnung dann, wenn die von der Informationssendeeinrichtung ISE emittierte Information IF durch die Informationserfassungseinrichtung IEE nicht mehr empfangbar ist.As soon as the vehicle FZ with the information transmission device ISE emitting the information IF enters or drives into an information acquisition area IEB of an information acquisition device IEE in the road device SV' or the "road side unit" RSU', RSU1', RSU2', RSU3', at the times t1, t2, t3, the information IF emitted by the information transmission device ISE with the parameter data PD is recorded by the information recording device IEE. The information detection range IEB reaches its maximum extent when the information IF emitted by the information transmission device ISE can no longer be received by the information detection device IEE.
Durch die infolge der sich ändernden, objektidentifizierenden Parameterdaten PD erfolgte Anonymisierung der gesendeten Informationen IF mit den Parameterdaten PD ist es auf der Basis der erhaltenen Parameterdaten PD so ohne weiteres nahezu unmöglich die Spur des Fahrzeugs FZ zu verfolgen und eine Aussage zum Verkehrsfluss auf der Verkehrstrasse VKS entlang der Erfassungstrecke EFS zu machen. Dadurch ist im herkömmlichen Sinne keine Verkehrsdatenermittlung möglich, da die Identifikation des Fahrzeuges fehlschlägt.Due to the anonymization of the transmitted information IF with the parameter data PD as a result of the changing, object-identifying parameter data PD, it is almost impossible to follow the lane of the vehicle FZ on the basis of the parameter data PD received and to make a statement about the traffic flow on the traffic route VKS to make along the acquisition route EFS. This is in the conventional No traffic data determination possible because the identification of the vehicle fails.
Fazit: Es gibt derzeit keine rechtlich legale, technisch ausgereifte und kostengünstige Lösung, um langfristige Verkehrsdaten zu ermitteln. Es gibt Lösungen, wo Taxiflotten mit SMS-Sendern ausgestattet wurden oder Lösungen, wo zum Beispiel Spuren der Freisprecheinrichtungen (z.B. Bluetooth) in Fahrzeugen an unterschiedlichen Orten genutzt werden, um Verkehrsdaten zu ermitteln. Aber Verfahren, wo objektidentifizierende bzw. fahrzeugidentifizierende Informationen, d.h. Kennzeichen zur Identität, herangezogen werden, sind aus rechtlichen Gründen (z.B. wegen Wahrung der Privatsphäre) problematisch, genehmigungspflichtig oder erst gar nicht erlaubt. Conclusion : There is currently no legally legal, technically mature and cost-effective solution to determine long-term traffic data. There are solutions where taxi fleets have been equipped with SMS transmitters or solutions where, for example, traces of hands-free devices (eg Bluetooth) in vehicles are used at different locations to determine traffic data. However, processes in which object-identifying or vehicle-identifying information, ie identifiers for identity, are used are problematic for legal reasons (e.g. to protect privacy), require approval or are not permitted at all.
Aus der
Die der Erfindung zugrundeliegende Aufgabe besteht darin, ein Verfahren, eine Vorrichtung und eine Anordnung zur Spurverfolgung von sich bewegenden Objekten anzugeben, bei dem bzw. bei der die Spur der Objekte - ohne die Nutzung von objektidentifizierenden Informationen, z.B. GPS-Informationen des Objektes oder andere individuelle Kennungen durch die ein Objekt grundsätzlich identifizierbar ist oder wenn die Objekte ihre jeweilige Identität ständig wechseln - verfolgbar ist.The object on which the invention is based is to specify a method, a device and an arrangement for tracking moving objects, in which the track of the objects - without the use of object-identifying information, e.g. GPS information of the object or other individual identifiers by which an object is fundamentally identifiable or if the objects constantly change their identity - can be traced.
Diese Aufgabe wird ausgehend von dem im Oberbegriff des Patentanspruchs 1 definierten Spurverfolgungsverfahren durch die im Kennzeichen des Patentanspruches 1 angegebenen Merkmale gelöst.Starting from the tracking method defined in the preamble of
Weiterhin wird die Aufgabe wird ausgehend von der im Oberbegriff des Patentanspruchs 9 definierten Spurverfolgungsanordnung durch die im Kennzeichen des Patentanspruches 9 angegebenen Merkmale gelöst.Furthermore, starting from the tracking arrangement defined in the preamble of patent claim 9, the object is achieved by the features specified in the characterizing part of patent claim 9.
Die der Erfindung zugrundeliegenden Idee besteht darin, wie man - mit Bezug auf den vorliegenden Vorschlag für ein Verfahren, eine Vorrichtung und eine Anordnung zur Spurverfolgung von sich bewegenden Objekten - auf der Basis der entlang einer Spurverfolgungsstrecke mehrfach, insbesondere an unterschiedlichen Orten zu unterschiedlichen Zeiten, stattfindenden Erfassung von Informationen mit nichtobjektidentifizierenden Parameterdaten, die von den sich bewegenden Objekten, vorzugsweise in regelmäßigen Zeitabständen, emittiert werden, durch objektgruppenspezifische Betrachtungen der erfassten Parameterdaten, aus diesen Betrachtungen gewonnenen gruppenspezifischen Datenprofilen und einen Datenprofil-Ähnlichkeitsvergleich eine Aussage über die erfolgreiche Spurverfolgung bezüglich wenigstens eines Teils der Objektgruppe entlang der Spurverfolgungsstrecke erhält und diesbezüglich eine Spurverfolgungsinformation erzeugt, deren Erzeugung unterbleibt falls keine solche Aussage möglich ist.The idea on which the invention is based is how - with reference to the present proposal for a method, a device and an arrangement for tracking moving objects - on the basis of the multiple times along a tracking route, in particular at different locations at different times, taking place acquisition of information with non-object-identifying parameter data, which are emitted by the moving objects, preferably at regular time intervals, through object-group-specific observations of the acquired parameter data, group-specific data profiles obtained from these observations and a data profile similarity comparison, a statement about the successful tracking with regard to at least one Receives part of the object group along the tracking route and generates tracking information in this regard, which is not generated if no such statement is possible.
Ganz generell lässt sich die vorstehend umrissene technische Lehre bezüglich der Spurverfolgung von sich bewegenden Objekten überall dort anwenden, wo aus mehrfach, insbesondere an unterschiedlichen Orten zu unterschiedlichen Zeiten gewonnenenIn very general terms, the technical teaching outlined above with regard to the tracking of moving objects can be applied wherever data is obtained from multiple data, in particular from different locations at different times
Informationen mit Daten von mehreren Informationsparametern, auch wenn diese teilweise anonymisiert sind, eine Aussage über eine erfolgreiche oder gescheiterte Spurverfolgung gemachen werden kann. Dies trifft z.B. zu auf die Spurverfolgung von Fahrzeugen im Straßenverkehr (Stw.: Verkehrstelematik), auf die Spurverfolgung von Menschen und Tieren im öffentlichen Raum und/oder in der Natur (Stw.: Überwachung von Personen und Tieren) etc.Information with data from several information parameters, even if these are partially anonymized, a statement can be made about a successful or failed tracking. This applies, for example, to the tracking of vehicles on the road (tw.: traffic telematics), to the tracking of people and animals in public space and/or in nature (tw.: surveillance of people and animals), etc.
Bezüglich des Anwendungsfalls zur Verkehrstelematik (z.B. der Spurverfolgung von Fahrzeugen im Straßenverkehr mittels eines "Intelligent-Transport-System (ITS)") kann man demzufolge aus mehrfach, insbesondere an unterschiedlichen Orten zu unterschiedlichen Zeiten gewonnenen ITS-Statusnachrichten (ITS-Statusinformationen), auch wenn diese anonymisiert sind, einen Verkehrsfluss über längere Strecken ermitteln.With regard to the use case for traffic telematics (e.g. the tracking of vehicles in road traffic using an "Intelligent Transport System (ITS)"), one can therefore also use ITS status messages (ITS status information) obtained several times, in particular at different locations and at different times if these are anonymized, determine a traffic flow over longer distances.
Dabei geht es insbesondere darum, dass:
- a) Kombinationen von bestimmten speziellen kennzeichnenden Parametern von ITS-Statusnachrichten (z.B. gemäß der Ansprüche 6 und 14 eine "Cooperative Awareness Message <CAM>" gemäß dem ETSI-Standard "ETSI TS 102 637-2" für Europa oder eine "Basic Safety Message <BSM>" gemäß dem SAE-Standard "SAE J2735" für USA) genutzt werden. Wenn mehrere Parameter vorhanden, können sie zur Identifikation aus verkehrstechnischer Sicht herangezogen werden. Nicht nur die Werte der Parameter, sondern auch die Änderung und deren zeitabhängige Änderung (z.B. alle 10 Minuten) einiger Parameter kann Aufschluss auf den Hersteller geben (z.B. das Ändern von Zertifikaten zur kryptographischen Signatur von gesendeten Nachrichten). Darüber hinaus kann die Zertifikate ausstellende Behörde Informationen über den Hersteller des Fahrzeuges oder einer Gruppe von Fahrzeugherstellern geben. Durch diese eindeutige Kombination mehrerer Parameter der vom Fahrzeug gesendeten Nachrichten ist das Fahrzeug aus verkehrstechnischer Sicht eindeutig erkennbar und dadurch ist es möglich, das Fahrzeug an unterschiedlichen Empfangspunkten (z.B. an "Road Side Units (RSU)") zu erfassen. Dadurch können zum Beispiel Reisedaten, Stauinformationen entlang einer Strecke ermittelt werden.
- b) Kombination von bestimmten speziellen kennzeichnenden Parametern der von einer Gruppe von Fahrzeugen gesendeten Statusinformationen genutzt werden. Dies erweitert den Fall a) von einem auf mehrere Fahrzeuge. Dadurch werden die Parameter der unterschiedlichen Statusinformationen einer Gruppe von Fahrzeugen zusammengefasst und als eindeutiges Kennzeichen(= Footprint, Stempel, etc.) berechnet. Zum Beispiel auf einer Autobahn ist die Gruppierung von Fahrzeugen auf längeren Strecken konstant (z.B. bei einer Kolonne von LKW's). Dadurch können mehrere eindeutige verkehrstechnische Kennzeichen erstellt werden, die an unterschiedlichen Informationserfassungspunkten identifiziert werden, ohne die Anonymität der einzelnen Fahrzeuge zu verletzen.
- a) Combinations of certain special characterizing parameters of ITS status messages (e.g. according to claims 6 and 14 a "Cooperative Awareness Message <CAM>" according to the ETSI standard "ETSI TS 102 637-2" for Europe or a "Basic Safety Message <BSM>" according to the SAE standard "SAE J2735" for USA). If there are several parameters, they can be used for identification from a traffic point of view. Not only the values of the parameters, but also the change and their time-dependent change (e.g. every 10 minutes) of some parameters can provide information about the manufacturer (e.g. changing certificates for the cryptographic signature of sent messages). In addition, the certificate-issuing authority can provide information about the manufacturer of the vehicle or a group of vehicle manufacturers. Through this unique By combining several parameters of the messages sent by the vehicle, the vehicle is clearly recognizable from a traffic point of view and this makes it possible to detect the vehicle at different receiving points (e.g. at "Road Side Units (RSU)"). This means, for example, travel data and traffic jam information can be determined along a route.
- b) combination of certain special characteristic parameters of the status information sent by a group of vehicles. This expands case a) from one to several vehicles. As a result, the parameters of the different status information of a group of vehicles are summarized and calculated as a unique identifier (= footprint, stamp, etc.). For example, on a highway, the grouping of vehicles is constant over longer stretches (eg, in a convoy of trucks). In this way, several unique traffic-related identifiers can be created, which are identified at different information collection points, without violating the anonymity of the individual vehicles.
Durch die Ermittlung und Zusammenfassung spezifischer Fahrzeugparameter einer Fahrzeuggruppe ist es möglich, einen sogenannten "Gruppenfußabdruck" (Footprint) einer an einer "V2X-Road Side Unit" (z.B. eine erste "Road Side Unit" RSU1) vorbeifahrenden Fahrzeuggruppe zu ermitteln. Dieser "Gruppenfußabdruck" kann dann an entlang der Strecke, stromabwärts, durch weitere "V2X-Road Side Units" (z.B. eine zweite "Road Side Unit" RSU2 und/oder eine dritte "Road Side Unit" RSU3) herangezogen werden, um die Fahrzeuggruppe zu identifizieren. Je mehr Fahrzeuge homogen in der Gruppe gemeinsam fahren, desto höher ist die Korrelation an den weiteren "V2X-Road Side Unit"-Messpunkten (RSU2, RSU3). Dadurch können verkehrstechnische Größen, wie Fahrtdauer, Verkehrsstau, Unfall, etc. ermittelt werden. Sollten Fahrzeuge entlang der Fahrt die Gruppe verlassen (z.B. Überholen, Abfahrt, etc.) soll der "Gruppenfußabdruck" immer als eine Kombination mehrerer Parameter innerhalb der Fahrzeuggruppe ermittelt werden. Je größer die Gruppe, desto einfacher die Korrelation der unterschiedlichen Parameter an den unterschiedlichen "V2X-Road Side Unit"-Installationen.By determining and summarizing specific vehicle parameters of a vehicle group, it is possible to determine a so-called "group footprint" (footprint) of a vehicle group driving past a "V2X Road Side Unit" (e.g. a first "Road Side Unit" RSU1). This "group footprint" can then be used along the route, downstream, by further "V2X-Road Side Units" (e.g. a second "Road Side Unit" RSU2 and/or a third "Road Side Unit" RSU3) to define the vehicle group to identify. The more vehicles driving homogeneously in the group, the higher the correlation at the other "V2X Road Side Unit" measuring points (RSU2, RSU3). In this way, traffic parameters such as travel time, traffic jams, accidents, etc. can be determined. Should vehicles leave the group along the journey (e.g. overtaking, departure, etc.), the "group footprint" should always be a combination of several parameters be determined within the vehicle group. The larger the group, the easier it is to correlate the different parameters on the different "V2X Road Side Unit" installations.
Dadurch ist es möglich, Verkehrsdaten von Fahrzeugen mit wechselnden Identitäten (Pseudonymen) entlang einer längeren Strecke zu erfassen. Diese Erfassung war bisher (mit herkömmlichen Methoden) aufgrund der wechselnden Identität so nicht möglich. Stattdessen konnte man die Verkehrsdaten nur im Bereich einer einzelnen Road Side Unit erfassen.This makes it possible to collect traffic data from vehicles with changing identities (pseudonyms) along a longer route. This recording was not previously possible (with conventional methods) due to the changing identity. Instead, the traffic data could only be recorded in the area of a single road side unit.
Vorteilhafte Weiterbildungen der in den unabhängigen Patentansprüchen jeweils angegebenen technischen Lehre sind in den davon jeweils abhängigen Patentansprüchen beansprucht.Advantageous developments of the technical teaching given in the independent patent claims are claimed in the respective dependent patent claims.
Im Falle der V2X-spezifischen ITS-Statusnachrichten (ITS-Statusinformationen) können z.B. gemäß der Ansprüche 7 und 15 in einer "Cooperative Awareness Message <CAM>" die folgenden fahrzeugspezifischen, fahrzeugcharakteristischen Nachrichtenparameter benutzt werden:
- Typus von unterschiedlichen Fahrzeugen der Verkehrsteilnehmer, z.B. Bus, Pkw, Motorrad, etc., in der Gruppe;
- Zeitstempel von Fahrzeugen der Verkehrsteilnehmer in der Gruppe soll zeitlich zusammenliegen;
- Position von unterschiedlichen Fahrzeugen der Verkehrsteilnehmer in der Gruppe sollte benachbart sein;
- Richtung von Fahrzeugen der Verkehrsteilnehmer in der Gruppe soll gleich sein;
- Geschwindigkeit von Fahrzeugen der Verkehrsteilnehmer in der Gruppe soll vergleichbar sein;
- Länge von unterschiedlichen Fahrzeugen der Verkehrsteilnehmer dient als Gruppenerkennungsmerkmal;
- Breite von unterschiedlichen Fahrzeugen der Verkehrsteilnehmer dient als Gruppenerkennungsmerkmal;
- Ausstellbehörde der kryptographischen Zertifikate für die Signatur der Statusnachrichten;
- Zertifikate Hierarchie zur Validierung des Zertifikates für die Signatur der Statusnachrichten;
- Wiederholrate der Änderung der Parameter.
- etc.
- type of different vehicles of road users, eg bus, car, motorcycle, etc., in the group;
- Time stamps of vehicles belonging to the road users in the group should coincide in time;
- Position of different vehicles of road users in the group should be adjacent;
- Direction of vehicles of road users in the group should be the same;
- Speed of vehicles of road users in the group should be comparable;
- Length of different vehicles of road users serves as a group identification feature;
- Width of different vehicles of road users serves as a group identification feature;
- authority issuing the cryptographic certificates for the signature of the status messages;
- Certificates Hierarchy for validating the certificate for the signature of the status messages;
- Repeat rate of changing parameters.
- Etc.
Darüber hinaus ist es möglich, dass Fahrzeuge weitere optionale Datenelemente in der Statusmeldung senden, die zur Identifizierung einer Fahrzeuggruppe herangezogen werden können.In addition, it is possible for vehicles to send other optional data elements in the status report that can be used to identify a vehicle group.
Weitere Vorteile der Erfindung ergeben sich aus der nachfolgenden Beschreibung eines Ausführungsbeispiels der Erfindung ausgehend von dem mit der
-
FIGUR 2der FIGUR 1 dargestellten ITS-Szenario ein erstes erweitertes Kooperatives ITS-Szenario zur Spurverfolgung von mindestens einem Fahrzeug aus einer Vielzahl von sich auf der Verkehrsstraße bzw. der Autobahn bewegenden Fahrzeugen, bei dem eine Aussage zur Spurverfolgung in einer zentralen Einheit gewonnen wird, -
FIGUR 3 ausgehend von dem inder FIGUR 1 dargestellten ITS-Szenario ein zweites erweitertes Kooperatives ITS-Szenario zur Spurverfolgung von mindestens einem Fahrzeug aus einer Vielzahl von sich auf der Verkehrsstraße bzw. der Autobahn bewegenden Fahrzeugen, bei dem eine Aussage zur Spurverfolgung in einer lokalen Einheit gewonnen wird, -
FIGUR 4 auf der Basis des erweiterten Kooperativen ITS-Szenarios zur Spurverfolgung gemäß derFIGUR 2FIGUR 2
-
FIGURE 2 starting from the one in theFIGURE 1 the ITS scenario shown is a first extended cooperative ITS scenario for tracking at least one vehicle from a large number of vehicles moving on the road or motorway, in which a statement on tracking is obtained in a central unit, -
FIGURE 3 starting from the one in theFIGURE 1 illustrated ITS scenario, a second extended cooperative ITS scenario for tracking at least one vehicle from a large number of vehicles moving on the traffic road or the motorway, in which a statement on tracking is obtained in a local unit, -
FIGURE 4 based on the extended Cooperative ITS scenario for tracking according to theFIGURE 2 the influence of dynamically changing affiliations of vehicles driving on the traffic route or the motorway to the first group in relation to the first "road side unit" with the first information acquisition area and to the second group in relation to the first "road side unit" with the first Information detection area according to the vehicle tracking the theFIGURE 2 similarity comparison to be carried out (correlation check).
Bei diesem erweiterten Kooperativen bewegen sich drei Fahrzeuge - ein erstes Fahrzeug FZ1, ein zweites Fahrzeug FZ2 und ein drittes Fahrzeug FZ3 -, die allesamt gemäß der
Die erste Spurverfolgungsstrecke SVS1 ist zugleich auch Erfassungsstrecke, weil jedes Fahrzeug FZ1, FZ2, FZ3 in der Kolonne in regelmäßigen Zeitabständen, z.B. alle 100ms, eine fahrzeugkorrespondierende Information IFFZ1, IFFZ2, IFFZ3 vorzugsweise via ein Funksignal aussendet bzw. emittiert, dass es zu erfassen gilt. Jedes Fahrzeug FZ1, FZ2, FZ3 weist dazu eine vorzugsweise als die V2X-Kommunikationseinheit ausgebildete, fahrzeugkorrespondierende Informationssendeeinrichtung ISEFZ1, ISEFZ2, ISEFZ3 auf, die auch wieder in die Bordelektronik des Fahrzeugs integriert ist (z.B., wenn das Fahrzeug ein "non-legacy vehicle" ist) oder aber als fahrzeugunabhängiges, separates Gerät (z.B., wenn das Fahrzeug ein "legacy vehicle" ist). Jede Information dieser fahrzeugkorrespondierenden Informationen IFFZ1, IFFZ2, IFFZ3 enthält gemäß den nachfolgenden Tabellen zu der
Die Tabelle-1- 


In den besagten Tabellen, Tabelle-1-
Die Anzahl der in der Tabelle jeweils enthaltenen Informationsparameter (sowohl in Bezug auf die objektidentifizierenden als auch für die nichtobjektidentifizierenden) ist grundsätzlich offen und kann bei Bedarf beliebig vergrößert oder verkleinert werden. Im vorliegenden Fall sind die für das Ausführungsbespiel maßgebenden Parameter angegeben. Die Bedeutung dieser angegebenen Parameter und deren Datenwerte sind allgemein bekannt und bedürfen deshalb an dieser Stelle keiner weiteren Erläuterung. Bei der Auswahl der Parameter sollte berücksichtigt werden (Kriterienkatalog), dass z.B. vorzugsweise
- unterschiedlichen Fahrzeugtypen der Verkehrsteilnehmer, z.B. Bus, Pkw, Motorrad, etc., erfasst werden;
- der Zeitstempel der erfassten Fahrzeuge der Verkehrsteilnehmer möglichst zeitlich zusammenliegen sollte;
- die Position der erfassten unterschiedlichen Fahrzeuge der Verkehrsteilnehmer möglichst benachbart sein sollte;
- die Richtung der erfassten Fahrzeuge der Verkehrsteilnehmer möglichst gleich sein sollte;
- die Geschwindigkeit der erfassten Fahrzeuge der Verkehrsteilnehmer möglichst vergleichbar sein sollte;
- die Länge der erfassten unterschiedlichen Fahrzeuge der Verkehrsteilnehmer als (Gruppen-)Erkennungsmerkmal dienen sollte;
- Breite von unterschiedlichen Fahrzeugen der Verkehrsteilnehmer dient als (Gruppen-)Erkennungsmerkmal dienen sollte;
- die Ausstellbehörde der kryptographischen Zertifikate für die Signatur der Statusnachrichten dient;
- Zertifikate-Hierarchie zur Validierung des Zertifikates für die Signatur der Statusnachrichten herangezogen wird;
- Wiederholrate der Änderung der Parameter genutzt wird.
- different vehicle types of road users, such as buses, cars, motorcycles, etc., are detected;
- the time stamp of the registered vehicles of road users should be as close together as possible;
- the position of the detected different vehicles of road users should be as close as possible;
- the direction of the detected vehicles of road users should be as similar as possible;
- the speed of the recorded vehicles of road users should be comparable as far as possible;
- the length of the recorded different vehicles of road users should serve as a (group) identifier;
- width of different vehicles of road users serves as a (group) identifier should serve;
- the authority issuing the cryptographic certificates is used to sign the status messages;
- Certificate hierarchy is used to validate the certificate for signing the status messages;
- Repetition rate of changing the parameters is used.
Befinden sich die Fahrzeuge FZ1, FZ2, FZ3 der Kolonne mit den die fahrzeugkorrespondierenden Informationen IFFZ1, IFFZ2, IFFZ3 emittierenden fahrzeugkorrespondierenden Informationssendeeinrichtungen ISEFZ1, ISEFZ2, ISEFZ3 in einem ersten Informationserfassungsbereich IEB1 einer ersten Informationserfassungseinrichtung IEE1 der modifizierten ersten "Road Side Unit" RSU1, so werden von den Informationssendeeinrichtungen ISEFZ1, ISEFZ2, ISEFZ3 der Fahrzeuge FZ1, FZ2, FZ3 zu dem Zeitpunkt t1 emittierte Informationen IFFZ1,t1, IFFZ2,t1, IFFZ3,t1 mit Parameterdaten PDFZ1,t1, PDFZ2,t1, PDFZ3,t1 von der ersten Informationserfassungseinrichtung IEE1 erfasst. Der erste Informationserfassungsbereich IEB1 erreicht - analog zu dem Informationserfassungsbereich IEB in der
Um nun im Unterschied zu dem vorstehend anhand der
Im vorliegenden Fall, zum Zeitpunkt t1 gemäß der
Für die weitere Durchführung der Spurverfolgung ist die erste Informationserfassungseinrichtung IEE1 jetzt derart ausgebildet, vorzugsweise durch allgemein übliche Mittel zur Datenverarbeitung (z.B. eine auf Mikroprozessor und Speicherkomponente basierende Hardwareeinheit und auf der Hardwareeinheit als Software betreib- und ausführbare Programm-Module), dass aus den erfassten ersten Parameterdaten PD1 ein erstgruppenspezifisches Datenprofil DPGR1, insbesondere ein Gruppen-Fußabdruck oder Gruppen-Stempel der Fahrzeuggruppe, erzeugt wird.For the further execution of the tracking, the first information acquisition device IEE1 is now designed in such a way, preferably by means of common data processing (e.g. a hardware unit based on a microprocessor and memory component and on the hardware unit as software operable and executable program modules) that from the acquired first parameter data PD1, a data profile DP GR1 specific to the first group, in particular a group footprint or group stamp of the vehicle group, is generated.
Dieses erstgruppenspezifische Datenprofil DPGR1 wird dann in der modifizierten ersten "Road Side Unit" RSU1 von der ersten Informationserfassungseinrichtung IEE1 an eine erste Kommunikationsschnittstelle KSS1, die mit der ersten Informationserfassungseinrichtung IEE1 verbunden ist und die das von der ersten Informationserfassungseinrichtung IEE1 erhaltene erstgruppenspezifische Datenprofil DPGR1 für eine Datenauswertung basierend auf einem Ähnlichkeitsvergleich von Datenprofilen zur Verfügung stellt. Wie, wann und wo dieser Datenprofil-Ähnlichkeitsvergleich stattfindet, wird weiter unten im Zusammenhang mit der Beschreibung der
In der Zwischenzeit, während des erste Datenprofil wie beschrieben erzeugt und weitergeleitet wird, bewegt sich die Fahrzeugkolonne weiter entlang der ersten Spurverfolgungsstrecke SVS1 auf der Verkehrsstraße bzw. der Autobahn VKS. Da die Fahrzeuge FZ1, FZ2, FZ3 in der Kolonne mit vergleichbarer Geschwindigkeit unterwegs sind und wenn weder eines der Fahrzeuge die Verkehrsstraße bzw. die Autobahn VKS verlässt - z.B. für einen Stopp an einer Tankstelle oder Raststätte oder aber um die Fahrt auf einer anderen Verkehrsstraße fortzusetzen - noch eines der Fahrzeuge durch Fahrzeugdefekt, z.B. Motorschaden, zwangsläufig aus der Kolonne ausscheidet und an den Straßenrand (im Fall der Autobahn auf dem Seitenstreifen) fährt und stehenbleibt, ist davon auszugehen, dass die Fahrzeugkolonne auch noch weiterhin gemeinsam auf der Verkehrsstraße bzw. der Autobahn VKS entlang der ersten Spurverfolgungsstrecke SVS1 unterwegs ist.In the meantime, while the first data profile is being generated and forwarded as described, the convoy of vehicles continues to move along the first tracking section SVS1 on the traffic road or the VKS motorway. Since the vehicles FZ1, FZ2, FZ3 are traveling in the convoy at a comparable speed and if neither of the vehicles leaves the road or the VKS motorway - e.g. for a stop at a gas station or service area or to continue driving on another road - another one of the vehicles due to vehicle defect, e.g. engine damage, inevitably leaves the convoy and drives to the side of the road (in the case of the freeway on the hard shoulder) and stops, it can be assumed that the convoy of vehicles will continue to travel together on the traffic road or the VKS freeway along the first tracking section SVS1.
Bei dem in der
Nähert sich nun die Kolonne mit den Fahrzeugen FZ1, FZ2, FZ3 der zweiten "Road Side Unit" RSU2 und befinden sich schließlich alle Fahrzeuge (wegen der vergleichbaren Geschwindigkeit) mit der die fahrzeugkorrespondierenden Informationen IFFZ1, IFFZ2, IFFZ3 emittierenden fahrzeugkorrespondierenden Informationssendeeinrichtung ISEFZ1, ISEFZ2, ISEFZ3 in einem zweiten Informationserfassungsbereich IEB2 einer zweiten Informationserfassungseinrichtung IEE2 der zweiten "Road Side Unit" RSU2, so werden von den Informationssendeeinrichtungen ISEFZ1, ISEEZ2, ISEFZ3 der Fahrzeuge FZ1, FZ2, FZ3 zu dem Zeitpunkt t2 emittierte Informationen IFFZ1,t2, IFFZ2,t2, IFFZ3,t2 mit Parameterdaten PDFZ1,t2, PDFZ2,t2, PDLZ3,t2 von der zweiten Informationserfassungseinrichtung IEE2 erfasst. Die Road Side Units" RSU1, RSU2 mit den beiden Informationserfassungsbereichen IEB1, IBE2 sind in einem beliebig wählbaren Abstand getrennt voneinander angeordnet. Der zweite Informationserfassungsbereich IEB2 erreicht auch wieder - analog zu dem Informationserfassungsbereich IEB in der
Die zweite Informationserfassungseinrichtung IEE2 erfasst, wie die erste Informationserfassungseinrichtung IEE1, in regelmäßigen Zeitabständen oder für ein berechnetes Zeitfenster - z.B. durch die Berechnung gemäß der Formel s = v*t (Wegstrecke gleich Geschwindigkeit mal Zeit), wobei s= Abstand zwischen RSU1 und RSU2 sowie v= Geschwindigkeit der Fahrzeugkolonne gemäß den Tabellen (vgl. Tabelle-1-
Im vorliegenden Fall, zum Zeitpunkt t2 gemäß der
Im Zuge der weiteren Durchführung der Spurverfolgung ist die zweite Informationserfassungseinrichtung IEE2 -wie die erste Informationserfassungseinrichtung IEE1 - derart ausgebildet, vorzugsweise wieder durch allgemein übliche Mittel zur Datenverarbeitung (z.B. eine auf Mikroprozessor und Speicherkomponente basierende Hardwareeinheit und auf der Hardwareeinheit als Software betreib- und ausführbare Programm-Module), dass aus den erfassten zweiten Parameterdaten PD2 ein zweitgruppenspezifisches Datenprofil DPGR2, insbesondere ein Gruppen-Fußabdruck oder Gruppen-Stempel der Fahrzeuggruppe, erzeugt wird.In the course of the further execution of the tracking, the second information acquisition device IEE2 - like the first information acquisition device IEE1 - is designed in this way, preferably again by means of generally customary means for data processing (e.g. a hardware unit based on a microprocessor and memory component and a program that can be operated and executed as software on the hardware unit Modules) that a second group-specific data profile DP GR2 , in particular a group footprint or group stamp of the vehicle group, is generated from the detected second parameter data PD2.
Dieses zweigruppenspezifische Datenprofil DPGR2 wird dann in der modifizierten zweiten "Road Side Unit" RSU2 von der zweiten Informationserfassungseinrichtung IEE2 an eine zweite Kommunikationsschnittstelle KSS2, die mit der zweiten Informationserfassungseinrichtung IEE2 verbunden ist und die das von der zweiten Informationserfassungseinrichtung IEE2 erhaltene zweitgruppenspezifische Datenprofil DPGR2 für eine Datenauswertung basierend auf einem Ähnlichkeitsvergleich von Datenprofilen zur Verfügung stellt.This two-group-specific data profile DP GR2 is then transmitted in the modified second "road side unit" RSU2 from the second information acquisition device IEE2 to a second communication interface KSS2, which is connected to the second information acquisition device IEE2 and which receives the second-group-specific data profile DP GR2 received from the second information acquisition device IEE2 for provides a data analysis based on a similarity comparison of data profiles.
Für diesen Datenprofil-Ähnlichkeitsvergleich liegen jetzt zwei vergleichbare Größen, die beiden Datenprofile DPGR1, DPGR2, vor. So werden das erste Datenprofil DPGR1 von der ersten Kommunikationsschnittstelle KSS1 in der ersten "Road Side Unit" RSU1 und das zweite Datenprofil DPGR2 von der zweiten Kommunikationsschnittstelle KSS2 in der zweiten "Road Side Unit" RSU2 an eine zentrale Einheit in Gestalt einer Auswerteeinrichtung AWE zugeführt. Die Kommunikationsschnittstellen KSS1, KSS2 sind zu dazu mit der Auswerteeinrichtung AWE verbunden, wobei die Verbindung beispielsweise drahtlos oder leitungsgebunden sein kann.Two comparable quantities, the two data profiles DP GR1 , DP GR2 , are now available for this data profile similarity comparison. The first data profile DP GR1 from the first communication interface KSS1 in the first "Road Side Unit" RSU1 and the second data profile DP GR2 from the second communication interface KSS2 in the second "Road Side Unit" RSU2 to a central unit in the form of an evaluation device AWE fed. For this purpose, the communication interfaces KSS1, KSS2 are connected to the evaluation device AWE, with the connection being able to be wireless or wired, for example.
Zur Durchführung des Datenprofil-Ähnlichkeitsvergleichs ist die Auswerteeinrichtung AWE jetzt derart ausgebildet, vorzugsweise durch allgemein übliche Mittel zum datenverarbeitungsgestützten Vergleichen von zwei Größen (z.B. eine auf Mikroprozessor und Speicherkomponente basierende Hardwareeinheit und auf der Hardwareeinheit als Software betreib- und ausführbare Programm-Module), dass das von der zweiten Kommunikationseinrichtung KSS2 zur Verfügung gestellte zweitgruppenspezifische Datenprofil DPGR2 mit dem von der ersten Kommunikationseinrichtung KSS1 zur Verfügung gestellten erstgruppenspezifischen Datenprofil DPGR1 parameterdatenweise, insbesondere aus einer Kombination der Parameterdaten PD1, PD2 innerhalb der Gruppen GR1, GR2, verglichen wird.In order to carry out the data profile similarity comparison, the evaluation device AWE is now designed in such a way, preferably using generally customary means for data processing Comparing two variables (e.g. a hardware unit based on a microprocessor and memory component and program modules that can be operated and executed as software on the hardware unit) that the second-group-specific data profile DP GR2 provided by the second communication device KSS2 with that provided by the first communication device KSS1 for Provided first-group-specific data profile DP GR1 is compared by parameter data, in particular from a combination of the parameter data PD1, PD2 within the groups GR1, GR2.
Ergibt der in der Auswerteeinrichtung AWE durchgeführte Datenprofil-Ähnlichkeitsvergleich, dass die Korrelation zwischen den ersten Parameterdaten PD1 und den zweiten Parameterdaten PD2 so groß ist, dass die Parameterdaten PD1, PD2 zumindest teilweise übereinstimmen, so kann eine Aussage über die erfolgreiche Spurverfolgung bezüglich der in der ersten Gruppe GR1 erfassten Fahrzeuge FZ1, FZ2, FZ3 entlang der ersten Spurverfolgungsstrecke SVS1 zwischen den beiden Informationserfassungsbereichen IEB1, IEB2 gemacht werden. In diesem Fall erzeugt bzw. generiert die Auswerteeinrichtung AWE eine Spurverfolgungsinformation SVI und leitet diese Information an eine vorzugsweise als Verkehrsleitzentrale ausgebildete Zentralen Überwachungsinstanz ZÜI weiter, mit der die Auswerteeinrichtung AWE, z.B. drahtlos oder leitungsgebunden, verbunden ist. Anderenfalls, wenn die Übereinstimmung zwischen den Parameterdaten PD1, PD2 nicht so groß ist, ist keine solche Aussage möglich und es unterbleibt die Erzeugung der Spurverfolgungsinformation SVI.If the data profile similarity comparison carried out in the evaluation device AWE shows that the correlation between the first parameter data PD1 and the second parameter data PD2 is so great that the parameter data PD1, PD2 at least partially match, a statement can be made about the successful tracking with regard to the vehicles FZ1, FZ2, FZ3 detected in the first group GR1 along the first tracking route SVS1 between the two information detection areas IEB1, IEB2. In this case, the evaluation device AWE produces or generates tracking information SVI and forwards this information to a central monitoring instance ZÜI, preferably designed as a traffic control center, to which the evaluation device AWE is connected, e.g. wirelessly or by wire. Otherwise, if the agreement between the parameter data PD1, PD2 is not so great, no such statement is possible and the tracking information SVI is not generated.
In der Verkehrsleitzentrale bzw. der Zentralen Überwachungsinstanz ZÜI kann die Spurverfolgungsinformation SVI vorzugsweise zur Ausstrahlung von Verkehrsnachrichten herangezogen oder für Kooperative ITS-Verkehrssysteme oder Verkehrstelematik-Systeme benutzt werden.In the traffic control center or the central monitoring authority ZÜI, the tracking information SVI can preferably be used for broadcasting traffic news or for cooperative ITS traffic systems or traffic telematics systems.
Bei diesem zweiten erweiterten Kooperativen bewegen sich - im Unterschied zu dem Szenario gemäß der
Die zweite Spurverfolgungsstrecke SVS2 ist zugleich auch Erfassungsstrecke, weil jedes Fahrzeug FZ4...FZ10 in den drei Fahrzeugkolonnen in regelmäßigen Zeitabständen, z.B. alle 100ms, eine fahrzeugkorrespondierende Information IFFZ4...IFFZ10 vorzugsweise via ein Funksignal aussendet bzw. emittiert, dass es zu erfassen gilt. Jedes Fahrzeug FZ4...FZ10 weist dazu eine vorzugsweise als die V2X-Kommunikationseinheit ausgebildete, fahrzeugkorrespondierende Informationssendeeinrichtung ISEFZ4...ISEFZ10 auf, die auch wieder in die Bordelektronik des Fahrzeugs integriert ist (z.B., wenn das Fahrzeug ein "non-legacy vehicle" ist) oder aber als fahrzeugunabhängiges, separates Gerät (z.B., wenn das Fahrzeug ein "legacy vehicle" ist). Jede Information dieser fahrzeugkorrespondierenden Informationen IFFZ4...IFFZ10 enthält gemäß den nachfolgenden Tabellen zu der
Die Tabelle-1- 





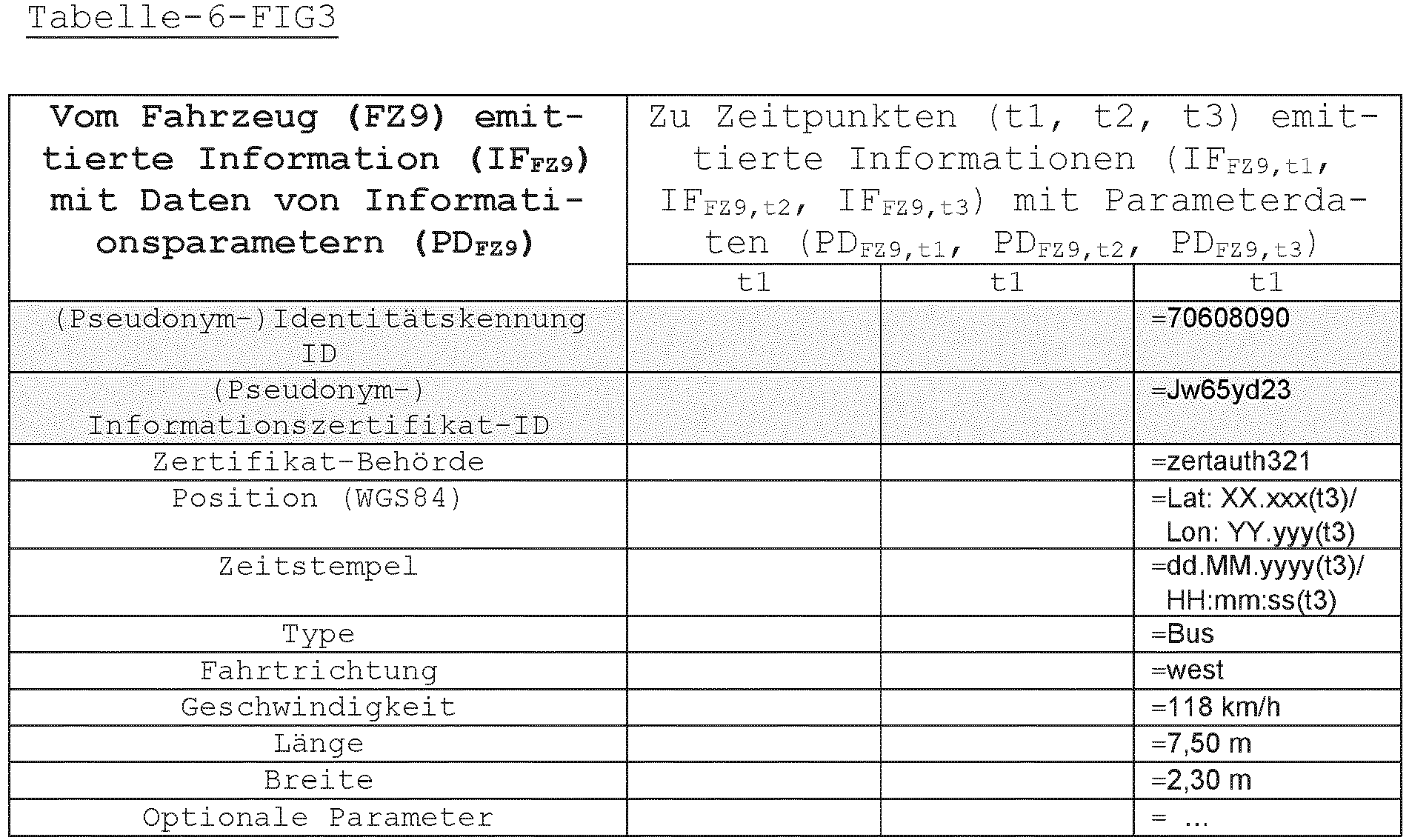

Bei den in den Tabellen enthaltenen Informationsparametern und den dazu fahrzeugkorrespondierenden Parameterdaten PDFZ4...PDFZ10 wird wieder unterschieden zwischen (i) Informationsparametern und dazu gehörenden Parameterdaten PDFZ4...PDEZ10 durch die die jeweilige fahrzeugkorrespondierenden Informationssendeeinrichtung ISEFZ4...ISEFZ10 als Sendequelle der Information IFFZ4...IFFZ10 und somit letztlich auch das jeweilige Fahrzeug FZ4...FZ10 eindeutig identifiziert wird und deren Datenwerte wie bereits vorstehend angegeben zu Anonymisierungszwecken laufend, in regelmäßigen Zeitabständen (z.B. im Bereich von ca. 1 Minute) geändert werden - im Weiteren werden diese Informationsparameter bzw. Parameterdaten PDFZ4...PDFZ10 als objektidentifizierende Informationsparametern bzw. Parameterdaten PDFZ4...PDFZ10 bezeichnet - sowie (ii) Informationsparametern und dazu gehörenden Parameterdaten PDFZ4...PDFZ10 durch die das jeweilige Fahrzeug FZ4...FZ10, in dem sich fahrzeugkorrespondierenden Informationssendeeinrichtung ISEFZ4...ISEFZ10 als Sendequelle der Information IFFZ4...IFFZ10 befindet, charakterisiert, gekennzeichnet, typisiert etc., aber nicht eindeutig identifiziert wird und deren Datenwerte keine Änderung erfahren - im Weiteren werden diese Informationsparameter bzw. Parameterdaten PDFZ4...PDFZ10 als nichtobjektidentifizierende Informationsparametern bzw. Parameterdaten PDFZ4...PDFZ10 bezeichnet.In the information parameters contained in the tables and the vehicle-corresponding parameter data PD FZ4 ... PD FZ10 , a distinction is again made between (i) information parameters and associated parameter data PD FZ4 ... PD EZ10 by the respective vehicle-corresponding Information transmission device ISE FZ4 ... ISE FZ10 is clearly identified as the transmission source of the information IF FZ4 ... IF FZ10 and thus ultimately also the respective vehicle FZ4 ... FZ10 and its data values are continuously, as already stated above, at regular intervals (e.g in the range of about 1 minute) - hereinafter these information parameters or parameter data PD FZ4 ... PD FZ10 are referred to as object-identifying information parameters or parameter data PD FZ4 ... PD FZ10 - and (ii) information parameters and associated parameter data PD FZ4 ... PD FZ10 by which the respective vehicle FZ4 ... FZ10 in which the vehicle-corresponding information transmission device ISE FZ4 ... ISE FZ10 is located as the transmission source of the information IF FZ4 ... IF FZ10 is characterized, identified, typed, etc. , but is not clearly identified and its data values are not changed - this information para meter or parameter data PD FZ4 ... PD FZ10 referred to as non-object-identifying information parameters or parameter data PD FZ4 ... PD FZ10 .
In den besagten Tabellen, Tabelle-1-
Die Anzahl der in der Tabelle jeweils enthaltenen Informationsparameter (sowohl in Bezug auf die objektidentifizierenden als auch für die nichtobjektidentifizierenden) ist grundsätzlich offen und kann bei Bedarf wieder beliebig vergrößert oder verkleinert werden. Im vorliegenden Fall sind die für das Ausführungsbespiel maßgebenden Parameter angegeben. Die Bedeutung dieser angegebenen Parameter und deren Datenwerte sind wieder allgemein bekannt und bedürfen deshalb an dieser Stelle keiner weiteren Erläuterung. Bei der Auswahl der Parameter sollte wieder berücksichtigt werden (Kriterienkatalog), dass z.B. vorzugsweise
- unterschiedlichen Fahrzeugtypen der Verkehrsteilnehmer, z.B. Bus, Pkw, Motorrad, etc., erfasst werden;
- der Zeitstempel der erfassten Fahrzeuge der Verkehrsteilnehmer möglichst zeitlich zusammenliegen sollte;
- die Position der erfassten unterschiedlichen Fahrzeuge der Verkehrsteilnehmer möglichst benachbart sein sollte;
- die Richtung der erfassten Fahrzeuge der Verkehrsteilnehmer möglichst gleich sein sollte;
- die Geschwindigkeit der erfassten Fahrzeuge der Verkehrsteilnehmer möglichst vergleichbar sein sollte;
- die Länge der erfassten unterschiedlichen Fahrzeuge der Verkehrsteilnehmer als (Gruppen-)Erkennungsmerkmal dienen sollte;
- Breite von unterschiedlichen Fahrzeugen der Verkehrsteilnehmer dient als (Gruppen-)Erkennungsmerkmal dienen sollte;
- die Ausstellbehörde der kryptographischen Zertifikate für die Signatur der Statusnachrichten dient;
- Zertifikate-Hierarchie zur Validierung des Zertifikates für die Signatur der Statusnachrichten herangezogen wird;
- Wiederholrate der Änderung der Parameter genutzt wird.
- different vehicle types of road users, such as buses, cars, motorcycles, etc., are detected;
- the time stamp of the registered vehicles of road users should be as close together as possible;
- the position of the detected different vehicles of road users should be as close as possible;
- the direction of the detected vehicles of road users should be as similar as possible;
- the speed of the recorded vehicles of road users should be comparable as far as possible;
- the length of the recorded different vehicles of road users should serve as a (group) identifier;
- width of different vehicles of road users serves as a (group) identifier should serve;
- the authority issuing the cryptographic certificates is used to sign the status messages;
- Certificate hierarchy is used to validate the certificate for signing the status messages;
- Repetition rate of changing the parameters is used.
Befinden sich die Fahrzeuge FZ4, FZ5, FZ6, FZ7 der ersten Fahrzeugkolonne mit den die fahrzeugkorrespondierenden Informationen IFFZ4, IFFZ5, IFFZ6, IFFZ7 emittierenden fahrzeugkorrespondierenden Informationssendeeinrichtungen ISEEZ4, ISEFZ5, ISEEZ6, ISEFZ7 in dem ersten Informationserfassungsbereich IEB1 der ersten Informationserfassungseinrichtung IEE1 der modifizierten ersten "Road Side Unit" RSU1, so werden von den Informationssendeeinrichtungen ISEEZ4, ISEFZ5, ISEFZ6, ISEFZ7 der Fahrzeuge FZ4, FZ5, FZ6, FZ7 zu dem Zeitpunkt t1 emittierte Informationen IFFZ4,t1, IFFZ5,t1, IFFZ6,t1, IFFZ7,t1 mit Parameterdaten PDFZ4,t1, PDFZ5,t1, PDFZ6,t1, PDFZ7,t1 von der ersten Informationserfassungseinrichtung IEE1 erfasst. Der erste Informationserfassungsbereich IEB1 erreicht wieder - analog zu dem Informationserfassungsbereich IEB in der
Um nun wieder im Unterschied zu dem vorstehend anhand der
Im vorliegenden Fall, zum Zeitpunkt t1 gemäß der
Für die weitere Durchführung der Spurverfolgung ist die erste Informationserfassungseinrichtung IEE1 jetzt wieder derart ausgebildet, vorzugsweise durch allgemein übliche Mittel zur Datenverarbeitung (z.B. eine auf Mikroprozessor und Speicherkomponente basierende Hardwareeinheit und auf der Hardwareeinheit als Software betreib- und ausführbare Programm-Module), dass aus den erfassten ersten Parameterdaten PD1 wieder das erstgruppenspezifische Datenprofil DPGR1, insbesondere der Gruppen-Fußabdruck oder Gruppen-Stempel der Fahrzeuggruppe, erzeugt wird.For the further implementation of the track tracking, the first information acquisition device IEE1 is now again designed in such a way, preferably by means of generally customary means for data processing (e.g. a hardware unit based on a microprocessor and memory component and program modules that can be operated and executed as software on the hardware unit), that detected first parameter data PD1 again the first group-specific data profile DP GR1 , in particular the group footprint or group stamp of the vehicle group, is generated.
Dieses erstgruppenspezifische Datenprofil DPGR1 wird dann wieder in der modifizierten ersten "Road Side Unit" RSU1 von der ersten Informationserfassungseinrichtung IEE1 an die erste Kommunikationsschnittstelle KSS1, die mit der ersten Informationserfassungseinrichtung IEE1 verbunden ist und die das von der ersten Informationserfassungseinrichtung IEE1 erhaltene erstgruppenspezifische Datenprofil DPGR1 für eine Datenauswertung basierend auf einem Ähnlichkeitsvergleich von Datenprofilen zur Verfügung stellt. Wie, wann und wo dieser Datenprofil-Ähnlichkeitsvergleich stattfindet, wird weiter unten im Zusammenhang mit der Beschreibung der
In der Zwischenzeit, während das erste Datenprofil wie beschrieben erzeugt und weitergeleitet wird, bewegt sich die erste Fahrzeugkolonne FZ4, FZ5, FZ6, FZ7 weiter entlang der zweiten Spurverfolgungsstrecke SVS2 auf der Verkehrsstraße bzw. der Autobahn VKS. Da die Fahrzeuge FZ4, FZ5, FZ6, FZ7 in der Kolonne jedoch mit unterschiedlicher Geschwindigkeit unterwegs sind, wird sich die erste Fahrzeugkolonne entlang der zweiten Spurverfolgungsstrecke SVS2 auflösen und reduzieren auf die Fahrzeuge mit vergleichbarer Geschwindigkeit. Dies sind die Fahrzeuge FZ6, FZ7, die als Teilkolonne der ersten Fahrzeugkolonne die erste Gruppe GR1 bilden. Es ist deshalb davon auszugehen, dass, wenn weder eines dieser Fahrzeuge die Verkehrsstraße bzw. die Autobahn VKS verlässt - z.B. für einen Stopp an einer Tankstelle oder Raststätte oder aber um die Fahrt auf einer anderen Verkehrsstraße fortzusetzen - noch eines der Fahrzeuge durch Fahrzeugdefekt, z.B. Motorschaden, zwangsläufig aus der Kolonne ausscheidet und an den Straßenrand (im Fall der Autobahn auf dem Seitenstreifen) fährt und stehenbleibt, dass die Fahrzeug-Teilkolonne auch noch weiterhin gemeinsam auf der Verkehrsstraße bzw. der Autobahn VKS entlang der zweiten Spurverfolgungsstrecke SVS2 unterwegs ist.In the meantime, while the first data profile is being generated and forwarded as described, the first vehicle convoy FZ4, FZ5, FZ6, FZ7 is moving further along the second tracking section SVS2 on the traffic road or the VKS motorway. However, since the vehicles FZ4, FZ5, FZ6, FZ7 in the convoy are traveling at different speeds, the first convoy of vehicles along the second tracking section SVS2 will break up and be reduced to vehicles with a comparable speed. These are the vehicles FZ6, FZ7, which as part of the convoy of the first Motorcade form the first group GR1. It can therefore be assumed that if neither one of these vehicles leaves the road or the VKS motorway - e.g. to stop at a petrol station or service area or to continue driving on another road - nor one of the vehicles due to a vehicle defect, e.g Engine failure, inevitably leaves the convoy and drives to the side of the road (in the case of the motorway on the hard shoulder) and stops, that the partial convoy of vehicles is still traveling together on the traffic road or the VKS motorway along the second tracking route SVS2.
Bei dem in der
Nähert sich nun die Teilkolonne mit den Fahrzeugen FZ6, FZ7 der zweiten "Road Side Unit" RSU2 und befinden sich schließlich für die zweite Fahrzeugkolonne neben den beiden genannten Fahrzeugen FZ6, FZ7 noch das Fahrzeug FZ8 mit den die fahrzeugkorrespondierenden Informationen IFFZ6, IFFZ7, IFFZ8 emittierenden fahrzeugkorrespondierenden Informationssendeeinrichtung ISEFZ6, ISEEZ7, ISEFZ8 in dem zweiten Informationserfassungsbereich IEB2 der zweiten Informationserfassungseinrichtung IEE2 der zweiten "Road Side Unit" RSU2, so werden von den Informationssendeeinrichtungen ISEEZ6, ISEEZ7, ISEFZ8 der Fahrzeuge FZ6, FZ7, FZ8 zu dem Zeitpunkt t2 emittierte Informationen IFFZ6,t2, IFFZ7,t2, IFFZ8,t2 mit Parameterdaten PDFZ6,t2, PDFZ7,t2, PDFZ8,t2 von der zweiten Informationserfassungseinrichtung IEE2 erfasst. Die Road Side Units" RSU1, RSU2 mit den beiden Informationserfassungsbereichen IEB1, IBE2 sind wieder in einem beliebig wählbaren Abstand getrennt voneinander angeordnet. Der zweite Informationserfassungsbereich IEB2 erreicht auch wieder - analog zu dem Informationserfassungsbereich IEB in der
Die zweite Informationserfassungseinrichtung IEE2 erfasst wieder, wie die erste Informationserfassungseinrichtung IEE1, in regelmäßigen Zeitabständen oder für ein berechnetes Zeitfenster - z.B. durch die Berechnung gemäß der Formel s = v*t (Wegstrecke gleich Geschwindigkeit mal Zeit), wobei s= Abstand zwischen RSU1 und RSU2 sowie v= Geschwindigkeit der Fahrzeugkolonne gemäß den Tabellen (vgl. Tabelle-1-
Im vorliegenden Fall, zum Zeitpunkt t2 gemäß der
Im Zuge der weiteren Durchführung der Spurverfolgung ist die zweite Informationserfassungseinrichtung IEE2 - wie die erste Informationserfassungseinrichtung IEE2 - wieder derart ausgebildet, vorzugsweise wieder durch allgemein übliche Mittel zur Datenverarbeitung (z.B. eine auf Mikroprozessor und Speicherkomponente basierende Hardwareeinheit und auf der Hardwareeinheit als Software betreib- und ausführbare Programm-Module), dass aus den erfassten zweiten Parameterdaten PD2 das zweigruppenspezifische Datenprofil DPGR2, insbesondere das Gruppen-Fußabdruck oder Gruppen-Stempel der Fahrzeuggruppe, erzeugt wird.In the course of the further implementation of the tracking, the second information acquisition device IEE2 - like the first information acquisition device IEE2 - is again designed in this way, preferably again using generally customary means for data processing (e.g. a hardware unit based on a microprocessor and memory component and which can be operated and executed as software on the hardware unit Program modules) that the two-group-specific data profile DP GR2 , in particular the group footprint or group stamp of the vehicle group, is generated from the detected second parameter data PD2.
Dieses zweitgruppenspezifische Datenprofil DPGR2 wird dann wieder in der modifizierten zweiten "Road Side Unit" RSU2 von der zweiten Informationserfassungseinrichtung IEE2 an die zweite Kommunikationsschnittstelle KSS2, die mit der zweiten Informationserfassungseinrichtung IEE2 verbunden ist und die das von der zweiten Informationserfassungseinrichtung IEE2 erhaltene zweitgruppenspezifische Datenprofil DPGR2 für eine Datenauswertung basierend auf einem Ähnlichkeitsvergleich von Datenprofilen zur Verfügung stellt.This second-group-specific data profile DP GR2 is then transmitted again in the modified second "Road Side Unit" RSU2 from the second information acquisition device IEE2 to the second communication interface KSS2, which is connected to the second information acquisition device IEE2 and which receives the second-group-specific data profile DP GR2 from the second information acquisition device IEE2 for a data evaluation based on a similarity comparison of data profiles.
In Bezug auf das in der
Nähert sich nun die Teilkolonne mit den Fahrzeugen FZ6, FZ7 der dritten "Road Side Unit" RSU3 und befinden sich schließlich für die dritte Fahrzeugkolonne neben diesen beiden Fahrzeuge FZ6, FZ7 noch die Fahrzeuge FZ9, FZ10 mit den die fahrzeugkorrespondierenden Informationen IFFZ6, IFFZ7, IFFZ9, IFFZ10 emittierenden fahrzeugkorrespondierenden Informationssendeeinrichtung ISEFZ6, ISEFZ7, ISEFZ9, ISEFZ10 in einem dritten Informationserfassungsbereich IEB3 einer dritten Informationserfassungseinrichtung IEE3 der dritten "Road Side Unit" RSU3, so werden von den Informationssendeeinrichtungen ISEEZ6, ISEFZ7, ISEFZ9, ISEFZ10 der Fahrzeuge FZ6, FZ7, FZ9, FZ10 zu dem Zeitpunkt t3 emittierte Informationen IFFZ6,t3, IFFZ7,t3, IFFZ9,t3, IFFZ10,t3 mit Parameterdaten PDFZ6,t3, PDEZ7,t3, PDFZ9,t3, PDFZ10,t3 von der dritten Informationserfassungseinrichtung IEE3 erfasst.Now the partial convoy with the vehicles FZ6, FZ7 approaches the third "Road Side Unit" RSU3 and finally for the third vehicle convoy next to these two vehicles FZ6, FZ7 there are also the vehicles FZ9, FZ10 with the vehicle-corresponding information IF FZ6 , IF FZ7 , IF FZ9 , IF FZ10 emitting vehicle-corresponding information transmission device ISE FZ6 , ISE FZ7 , ISE FZ9 , ISE FZ10 in a third information acquisition area IEB3 of a third information acquisition device IEE3 of the third "Road Side Unit" RSU3, the information transmission facilities ISE EZ6 , ISE FZ7 , ISE FZ9 , ISE FZ10 of the vehicles FZ6, FZ7, FZ9, FZ10 at the time t3 emitted information IF FZ6,t3 , IF FZ7,t3 , IF FZ9,t3 , IF FZ10,t3 with parameter data PD FZ6,t3 , PD EZ7,t3 , PD FZ9,t3 , PD FZ10,t3 detected by the third information detection device IEE3.
Da die Fahrzeug-Spurverfolgung auf einem Ähnlichkeitsvergleich basiert und hierfür stets die an zwei Messpunkten erfassten Daten miteinander verglichen werden, ist der dritte Informationserfassungsbereich IEB3 mit der dritten Informationserfassungseinrichtung IEE3 in Bezug auf diesen Vergleich ein weiterer zweiter Informationserfassungsbereich IEB2 mit einer weiteren zweiten Informationserfassungseinrichtung IEE2, die für eine weitere zweite Gruppe GR2 von Fahrzeugen weitere zweite Informationen IF2 mit weiteren zweiten Parameterdaten PD2 erfasst. Vor diesem Hintergrund sind die nachfolgenden Ausführungen, die sich die Erfassung von Informationen zum dritten Zeitpunkt t3 beziehen, einzuordnen.Since the vehicle lane tracking is based on a similarity comparison and for this purpose the data recorded at two measuring points is always compared with one another, the third information recording area IEB3 with the third information recording device IEE3 is, with regard to this comparison, a further second information recording area IEB2 with a further second information recording device IEE2, the for a further second group GR2 of vehicles further second information IF2 recorded with further second parameter data PD2. Against this background, the following explanations, which relate to the collection of information at the third point in time t3, are to be classified.
Die Road Side Units" RSU1, RSU2, RSU3 mit den jeweils beiden Informationserfassungsbereichen IEB1, IBE2 sind wieder in einem beliebig wählbaren Abstand getrennt voneinander angeordnet. Der weitere zweite Informationserfassungsbereich IEB2 (IEB3) erreicht auch wieder - analog zu dem Informationserfassungsbereich IEB in der
Die weitere zweite Informationserfassungseinrichtung IEE2 erfasst wieder, wie die erste Informationserfassungseinrichtung IEE1 und die zweite Informationserfassungseinrichtung IEE2, in regelmäßigen Zeitabständen oder für ein berechnetes Zeitfenster - z.B. durch die Berechnung gemäß der Formel s = v*t (Wegstrecke gleich Geschwindigkeit mal Zeit), wobei s= Abstand zwischen RSU1 und RSU2 sowie v= Geschwindigkeit der Fahrzeugkolonne gemäß den Tabellen (vgl. Tabelle-1-
Im vorliegenden Fall, zum Zeitpunkt t3 gemäß der
Im Zuge der weiteren Durchführung der Spurverfolgung ist auch die weitere zweite Informationserfassungseinrichtung IEE2 - wie die erste Informationserfassungseinrichtung IEE1 und die zweite Informationserfassungseinrichtung IEE2 - wieder derart ausgebildet, vorzugsweise wieder durch allgemein übliche Mittel zur Datenverarbeitung (z.B. eine auf Mikroprozessor und Speicherkomponente basierende Hardwareeinheit und auf der Hardwareeinheit als Software betreib- und ausführbare Programm-Module), dass aus den erfassten weiteren zweiten Parameterdaten PD2 das weitere zweitgruppenspezifische Datenprofil DPGR2, insbesondere der Gruppen-Fußabdruck oder Gruppen-Stempel der Fahrzeuggruppe, erzeugt wird.In the course of the further implementation of the track tracking, the further second information acquisition device IEE2 - like the first information acquisition device IEE1 and the second information acquisition device IEE2 - is again configured in this way, preferably again using generally customary means for data processing (e.g. a hardware unit based on a microprocessor and memory component and on the Hardware unit as software operable and executable program modules) that the further second group-specific data profile DP GR2 , in particular the group footprint or group stamp of the vehicle group, is generated from the detected further second parameter data PD2.
Dieses weitere zweitgruppenspezifische Datenprofil DPGR2 wird dann wieder in der modifizierten dritten "Road Side Unit" RSU3 von der weiteren zweiten Informationserfassungseinrichtung IEE2 an eine dritte Kommunikationsschnittstelle KSS3, die definitionsgemäß eine weitere zweite Kommunikationsschnittstelle KSS2 ist, die mit der weiteren zweiten Informationserfassungseinrichtung IEE2 verbunden ist und die das von der weiteren zweiten Informationserfassungseinrichtung IEE2 erhaltene weitere zweitgruppenspezifische Datenprofil DPGR2 für eine Datenauswertung basierend auf einem Ähnlichkeitsvergleich von Datenprofilen zur Verfügung stellt.This further second-group-specific data profile DP GR2 is then sent again in the modified third "road side unit" RSU3 from the further second information acquisition device IEE2 to a third communication interface KSS3, which by definition is another second communication interface KSS2, which is connected to the further second information acquisition device IEE2 and which makes available the further second group-specific data profile DP GR2 received from the further second information acquisition device IEE2 for a data evaluation based on a similarity comparison of data profiles.
Bevor jetzt ausgeführt was mit den beiden Datenprofil DPGR2, DPGR2 im Weiteren passiert, sei an dieser Stelle angemerkt, dass alternativ zu dem vorstehend beschriebenen zweiten Informationserfassungsbereich IEB2 zum Zeitpunkt t2 der weitere zweite Informationserfassungsbereich IEB2 zum Zeitpunkt t3 mit den vorstehend beschriebenen Modifikationen für die Erzeugung des zweitgruppenspezifische Datenprofil DPGR2 verwendet werden kann.Before now explaining what happens to the two data profiles DP GR2 , DP GR2 , it should be noted at this point that as an alternative to the second information acquisition area described above IEB2 at time t2 the further second information acquisition area IEB2 can be used at time t3 with the modifications described above for generating the second-group-specific data profile DP GR2 .
Darüber hinaus ist es auch möglich (in Abwandlung zu dem bisher Beschriebenen, wo der erste Informationserfassungsbereich IEB1 zum Zeitpunkt t1 und der zweite Informationserfassungsbereich IEB2 zum Zeitpunkt t2 vorliegt), dass der erste Informationserfassungsbereich IEB1 zum Zeitpunkt t2 für die Erzeugung des erstgruppenspezifischen Datenprofils DPGR1 und der zweite Informationserfassungsbereich IEB2 zum Zeitpunkt t3 für die Erzeugung des zweitgruppenspezifischen Datenprofils DPGR2 mit den entsprechenden sich aus der
Für den angesprochenen Datenprofil-Ähnlichkeitsvergleich liegen jetzt - egal zu welchem Zeitpunkt was erfasst wird - zwei vergleichbare Größen, die beiden Datenprofile DPGR1, DPGP2, vor. Soll dieser Datenprofil-Ähnlichkeitsvergleich jetzt im Unterschied zu dem Fall gemäß der
Die eine Option ist, dass das erste Datenprofil DPGR1 über die erste Kommunikationsschnittstelle KSS1 in der ersten "Road Side Unit" RSU1 über eine z.B. drahtlose oder leitungsgebundene Verbindung an die zweite Kommunikationsschnittstelle KSS2 in der zweiten "Road Side Unit" RSU2 oder an die weitere zweite Kommunikationsschnittstelle KSS2 in der dritten "Road Side Unit" RSU3 übertragen wird und die zweite Kommunikationsschnittstelle KSS2 in der zweiten "Road Side Unit" RSU2 dann die beiden Datenprofile DPGR1, DPGR2 der Auswerteeinrichtung AWE in der zweiten "Road Side Unit" RSU2 für den durchzuführenden Datenprofil-Ähnlichkeitsvergleich zuführt oder aber die weitere zweite Kommunikationsschnittstelle KSS2 in der dritten "Road Side Unit" RSU3 dann die beiden Datenprofile DPGR1, DPGR2 der Auswerteeinrichtung AWE in der dritten "Road Side Unit" RSU3 für den durchzuführenden Datenprofil-Ähnlichkeitsvergleich zuführt.One option is that the first data profile DP GR1 via the first communication interface KSS1 in the first "Road Side Unit" RSU1 via a wireless or wired connection, for example, to the second communication interface KSS2 in the second "Road Side Unit" RSU2 or to the other second communication interface KSS2 is transmitted in the third "Road Side Unit" RSU3 and the second communication interface KSS2 in the second "Road Side Unit" RSU2 then the two data profiles DP GR1 , DP GR2 of the evaluation device AWE in the second "Road Side Unit" RSU2 for the data profile similarity comparison to be carried out or the other second communication interface KSS2 in the third "Road Side Unit" RSU3 then supplies the two data profiles DP GR1 , DP GR2 to the evaluation device AWE in the third "Road Side Unit" RSU3 supplies for the data profile similarity comparison to be carried out.
Die andere Option ist, dass das zweite Datenprofil DPGR2 über die zweite Kommunikationsschnittstelle KSS2 in der zweiten "Road Side Unit" RSU2 oder aber das weitere zweite Datenprofil DPGR2 über die weitere zweite Kommunikationsschnittstelle KSS2 in der dritten "Road Side Unit" RSU3 jeweils über eine z.B. drahtlose oder leitungsgebundene Verbindung an die erste Kommunikationsschnittstelle KSS1 in der ersten "Road Side Unit" RSU1 übertragen wird und die erste Kommunikationsschnittstelle KSS1 dann die beiden Datenprofile DPGR1, DPGR2 der Auswerteeinrichtung AWE in der ersten "Road Side Unit" RSU1 für den durchzuführenden Datenprofil-Ähnlichkeitsvergleich zuführt.The other option is that the second data profile DP GR2 via the second communication interface KSS2 in the second "Road Side Unit" RSU2 or the further second data profile DP GR2 via the further second communication interface KSS2 in the third "Road Side Unit" RSU3 respectively a wireless or wired connection, for example, is transmitted to the first communication interface KSS1 in the first "Road Side Unit" RSU1 and the first communication interface KSS1 then transmits the two data profiles DP GR1 , DP GR2 of the evaluation device AWE in the first "Road Side Unit" RSU1 for the data profile similarity comparison to be carried out.
Unabhängig davon welche Option letztlich zum Tragen kommt, zur Durchführung des Datenprofil-Ähnlichkeitsvergleichs ist die Auswerteeinrichtung AWE wieder derart ausgebildet, vorzugsweise wieder durch allgemein übliche Mittel zum datenverarbeitungsgestützten Vergleichen von zwei Größen (z.B. eine auf Mikroprozessor und Speicherkomponente basierende Hardwareeinheit und auf der Hardwareeinheit als Software betreib- und ausführbare Programm-Module), dass das zur Verfügung gestellte zweitgruppenspezifische Datenprofil DPGR2 mit dem zur Verfügung gestellten erstgruppenspezifischen Datenprofil DPGR1 parameterdatenweise, insbesondere aus einer Kombination der Parameterdaten PD1, PD2 innerhalb der Gruppen GR1, GR2, verglichen wird.Irrespective of which option ultimately comes into play, the evaluation device AWE is again designed in such a way to carry out the data profile similarity comparison, preferably again using generally available means for data processing-supported comparisons of two variables (e.g. a hardware unit based on a microprocessor and memory component and on the hardware unit as software operable and executable program modules) that the provided second-group-specific data profile DP GR2 is compared with the provided first-group-specific data profile DP GR1 in terms of parameter data, in particular from a combination of the parameter data PD1, PD2 within the groups GR1, GR2.
Ergibt der in der Auswerteeinrichtung AWE durchgeführte Datenprofil-Ähnlichkeitsvergleich wieder, dass die Korrelation zwischen den ersten Parameterdaten PD1 und den zweiten Parameterdaten PD2 so groß ist, dass die Parameterdaten PD1, PD2 zumindest teilweise übereinstimmen, so kann eine Aussage über die erfolgreiche Spurverfolgung bezüglich der in der ersten Gruppe GR1 erfassten Fahrzeuge FZ1, FZ2, FZ3 entlang der ersten Spurverfolgungsstrecke SVS1 zwischen den beiden Informationserfassungsbereichen IEB1, IEB2 gemacht werden. In diesem Fall erzeugt bzw. generiert die jeweilige Auswerteeinrichtung AWE in der ersten "Road Side Unit" RSU1, in der zweiten "Road Side Unit" RSU2 oder in der zweiten "Road Side Unit" RSU3 die Spurverfolgungsinformation SVI und leitet diese Information an die vorzugsweise als Verkehrsleitzentrale ausgebildete Zentralen Überwachungsinstanz ZÜI weiter, mit der die Auswerteeinrichtung AWE, z.B. drahtlos oder leitungsgebunden, verbunden ist. Anderenfalls, wenn die Übereinstimmung zwischen den Parameterdaten PD1, PD2 nicht so groß ist, ist keine solche Aussage möglich und es unterbleibt die Erzeugung der Spurverfolgungsinformation SVI.If the data profile similarity comparison carried out in the evaluation device AWE shows that the correlation between the first parameter data PD1 and the second parameter data PD2 is so large that the parameter data PD1, PD2 at least partially match, a statement can be made about the successful tracking of the vehicles FZ1, FZ2, FZ3 detected in the first group GR1 along the first tracking section SVS1 between the two information detection areas IEB1, IEB2 will. In this case, the respective evaluation device AWE generates or generates the tracking information SVI in the first "road side unit" RSU1, in the second "road side unit" RSU2 or in the second "road side unit" RSU3 and forwards this information to the preferably central monitoring instance ZÜI further trained as a traffic control center, with which the evaluation device AWE, for example wirelessly or wired, is connected. Otherwise, if the agreement between the parameter data PD1, PD2 is not so great, no such statement is possible and the tracking information SVI is not generated.
In der Verkehrsleitzentrale bzw. der Zentralen Überwachungsinstanz ZÜI kann die Spurverfolgungsinformation SVI dann wieder vorzugsweise zur Ausstrahlung von Verkehrsnachrichten herangezogen oder für Kooperative IST-Verkehrssysteme oder Verkehrstelematik-Systeme benutzt werden.In the traffic control center or the central monitoring instance ZÜI, the tracking information SVI can then preferably be used again for broadcasting traffic news or used for cooperative actual traffic systems or traffic telematics systems.
In Bezug auf die erste "Road Side Unit" mit dem ersten Informationserfassungsbereich IEB1RSU1 gehören zu der ersten Gruppe GR1 zu einem n-ten Zeitpunkt tn die Fahrzeuge FZ5, FZ6, FZ8, FZ9, zu einem (n+1)-ten Zeitpunkt tn+1 die Fahrzeuge FZ2, FZ4, FZ5, FZ6, FZ7 und (n+2)-ten Zeitpunkt tn+2 die Fahrzeuge FZ1, FZ2, FZ3, FZ4.In relation to the first "roadside unit" with the first information acquisition area IEB1 RSU1, the vehicles FZ5, FZ6, FZ8, FZ9 belong to the first group GR1 at an nth point in time t n at an (n+1)th point in time t n+1 the vehicles FZ2, FZ4, FZ5, FZ6, FZ7 and (n+2)-th point in time t n+2 the vehicles FZ1, FZ2, FZ3, FZ4.
In Bezug auf die zweite "Road Side Unit" mit dem zweiten Informationserfassungsbereich IEB2RSU2 gehören zu der zweiten Gruppe GR2 zu einem m-ten Zeitpunkt tm die Fahrzeuge FZ6, FZ7, FZ8 und zu einem (m+1)-ten Zeitpunkt tm+1 die Fahrzeuge FZ2, FZ4, FZ5, FZ7.In relation to the second “roadside unit” with the second information acquisition area IEB2 RSU2 , the vehicles FZ6, FZ7, FZ8 belong to the second group GR2 at an mth point in time tm and at an ( m +1)th point in time tm +1 the vehicles FZ2, FZ4, FZ5, FZ7.
Wird nun der Korrelationscheck zwischen der ersten Gruppe GR1 und der zweiten Gruppe GR2 zu den jeweiligen Zeitpunkten durchgeführt, so ergeben sich folgende Korrelationswerte KW: 

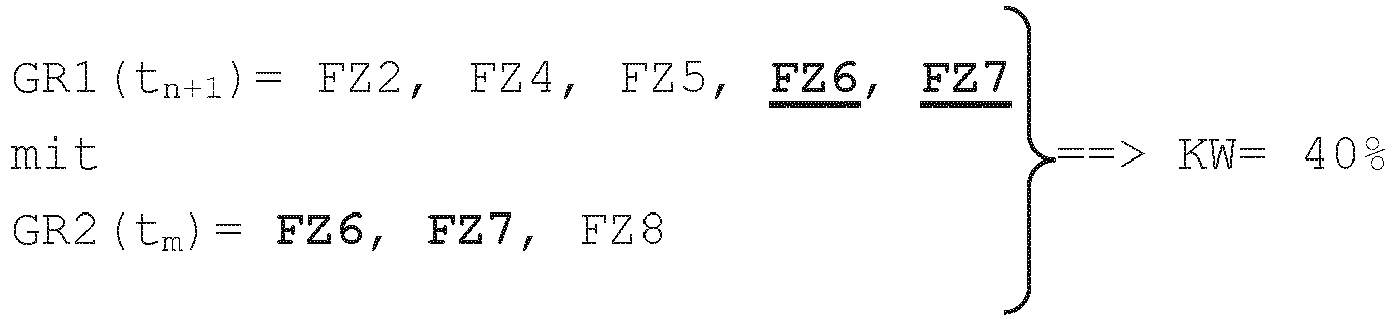

![]()
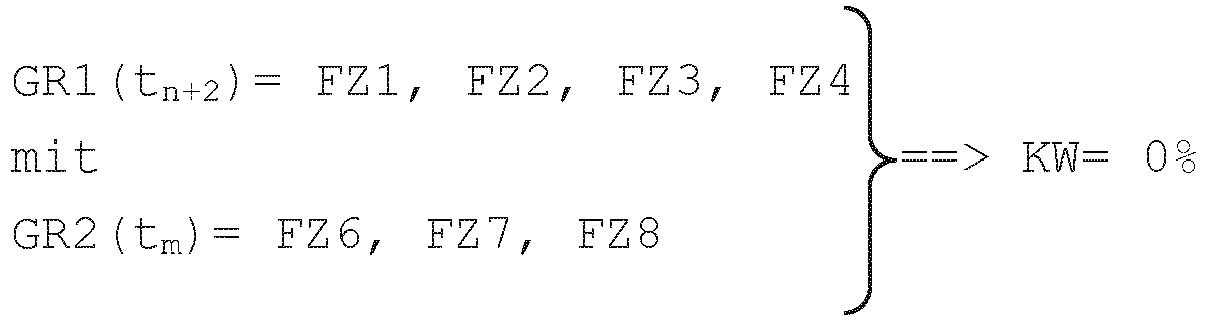

![]()
Claims (16)
- Method for tracking moving objects (FZ, FZ1...FZ10, FZ01...FZ09) whichmove in an area along a tracking route (SVS1, SVS2) in a defined direction of movement (BWR) andemit information (IF, IF1, IF2) with data relating to a plurality of non-object-identifying information parameters (PD, PD1, PD2), preferably at regular intervals of time, in whicha) with respect to the moving objects, the information (IF, IF1, IF2) emitted by the latter is captured with the non-object-identifying parameter data (PD, PD1, PD2) repeatedly, in particular at different locations at different times (t1, t2, t3),
characterized in thatb) first information (IF1) is captured with first parameter data (PD1) from a first group (GR1) of the objects (FZ, FZ1...FZ10, FZ01...FZ09), which comprises a plurality of objects, in a first information capture region (IEB1) along the tracking route (SVS1, SVS2) and for the defined direction of movement (BWR),c) a data profile (DPGR1) specific to the first group is generated from the captured first parameter data (PD1), andd) the data profile (DPGR1) specific to the first group is provided for data evaluation based on a similarity comparison of data profiles,e) second information (IF2) is respectively captured with second parameter data (PD2) from a second group (GR2) of the objects (FZ, FZ1...FZ10, FZ01...FZ09), which comprises a plurality of objects, in at least one further, second information capture region (IEB2) spaced apart from the first information capture region (IEB1) along the tracking route (SVS1, SVS2) at regular intervals of time or for a calculated time window after the capture in the first information capture region (IEB1) for the defined direction of movement (BWR) for each interval of time or for each time window,f) a data profile (DPGR2) specific to the second group is respectively generated from the respectively captured second parameter data (PD2), andg) the respectively generated data profile (DPGR2) specific to the second group is provided for the data evaluation based on the data profile similarity comparison,h) each data profile (DPGR2) specific to the second group is compared with the data profile (DPGR1) specific to the first group during the data evaluation using parameter data, in particular from a combination of the parameter data (PD1, PD2) within the groups (GR1, GR2),i) if it is determined, during the data profile similarity comparison carried out in each case, that the correlation between the first parameter data (PD1) and the second parameter data (PD2) is so great that the parameter data (PD1, PD2) at least partially correspond, a statement can be made on the successful tracking of at least some of the objects captured in the first group (GR1) along the tracking route (SVS1, SVS2) between the two information capture regions (IEB1, IEB2) and an item of tracking information (SVI) is generated, otherwise such an item of tracking information (SVI) is not generated. - Tracking method according to Claim 1, characterized in that
method steps a) to d) or method steps a) and e) to g) are carried out in a first device (SV, RSU1, RSU2, RSU3) and method steps h) and i) are carried out in a second device (AWE, ZÜI). - Tracking method according to Claim 1, characterized in that
method steps a) to d) or method steps a) and e) to g) and method steps h) and i) are carried out in a single device (SV, RSU1, RSU2, RSU3). - Tracking method according to Claim 1, 2 or 3, characterized in that
the object (FZ, FZ1...FZ10, FZ01...FZ09) moving along the tracking route (SVS1, SVS2) in the area is a motor vehicle driving on a road (VKS), in particular a motorway. - Tracking method according to Claim 4, characterized in that
the information (IF1, IF2) with the non-object-identifying parameter data (PD1, PD2) is an "intelligent transport system (ITS)" status message containing data relating to a plurality of vehicle-specific, vehicle-characteristic message parameters. - Tracking method according to Claim 5, characterized in that
the ITS status message is a "cooperative awareness message <CAM>" according to the ETSI standard "ETSI TS 102 637-2" or a "basic safety message <BSM>" according to the SAE standard "SAE J2735". - Tracking method according to Claim 6, characterized in that
the following vehicle-specific, vehicle-characteristic message parameters are used in the "cooperative awareness message <CAM>":- type of different vehicles belonging to the road users, for example bus, car, motorcycle, etc., in the group;- time stamp of vehicles belonging to the road users in the group should be close in terms of time;- position of different vehicles belonging to the road users in the group should be adjacent;- direction of vehicles belonging to the road users in the group should be the same;- speed of vehicles belonging to the road users in the group should be comparable;- length of different vehicles belonging to the road users is used as a group identifying feature;- width of different vehicles belonging to the road users is used as a group identifying feature;- issuing authority of the cryptographic certificates for the signature of the status messages;- certificate hierarchy for validating the certificate for the signature of the status messages;- repetition rate of the change of the parameters. - Tracking method according to one of Claims 1 to 7, characterized in that
the tracking information (SVI) is transmitted to a central monitoring entity (ZÜI), in particular a traffic control centre, and, in this respect, is used to broadcast traffic messages or is used for cooperative "intelligent transport system (ITS)" traffic systems or traffic telematics systems. - Arrangement for tracking moving objects (FZ, FZ1...FZ10, FZ01...FZ09) whichmove in an area along a tracking route (SVS1, SVS2) in a defined direction of movement (BWR) andemit information (IF, IF1, IF2) with data relating to a plurality of non-object-identifying information parameters (PD, PD1, PD2), preferably at regular intervals of time, havinga) at least two information capture devices (IEE1, IEE2) which capture the information (IF, IF1, IF2) emitted by the moving objects with the non-object-identifying parameter data (PD, PD1, PD2), in particular at different locations at different times (t1, t2, t3),
characterized byb) a first information capture device (IEE1)b1) which captures first information (IF1) with first parameter data (PD1) from a first group (GR1) of the objects (FZ, FZ1...FZ10, FZ01...FZ09), which comprises a plurality of objects, in a first information capture region (IEB1) along the tracking route (SVS1, SVS2) for the defined direction of movement (BWR) andb2) is designed in such a manner that a data profile (DPGR1) specific to the first group can be generated from the captured first parameter data (PD1),c) a first communication interface (KSS1) which is connected to the first information capture device (IEE1) and provides the data profile (DPGR1) specific to the first group and received from the first information capture device (IEE1) for data evaluation based on a similarity comparison of data profiles,d) at least one second information capture device (IEE2)d1) which respectively captures second information (IF2) with second parameter data (PD2) from a second group (GR2) of the objects (FZ, FZ1...FZ10, FZ01...FZ09), which comprises a plurality of objects, in a further, second information capture region (IEB2) spaced apart from the first information capture region (IEB1) along the tracking route (SVS1, SVS2) for the defined direction of movement (BWR) at regular intervals of time or for a calculated time window after the capture in the first information capture region (IEB1) for each interval of time or for each time window andd2) is designed in such a manner that a second data profile (DPGR2) specific to the second group can be respectively generated from the respectively captured second parameter data (PD2),e) a second communication interface (KSS2) which is connected to the second information capture device (IEE2) and provides the data profile (DPGR2) specific to the second group and received from the second information capture device (IEE2) for the data evaluation based on the data profile similarity comparison,f) an evaluation device (AWE) which is connected to the first communication interface (KSS1) and to the second communication interface (KSS2) and is designed in such a manner thatf1) each data profile (DPGR2) specific to the second group and provided by the second communication device (KSS2) is compared with the data profile (DPGR1)specific to the first group and provided by the first communication device (KSS1) using parameter data, in particular from a combination of the parameter data (PD1, PD2) within the groups (GR1, GR2),f2) if it is determined, during the data profile similarity comparison respectively carried out, that the correlation between the first parameter data (PD1) and the second parameter data (PD2) is so great that the parameter data (PD1, PD2) at least partially correspond, a statement can be made on the successful tracking of at least some of the objects captured in the first group (GR1) along the tracking route (SVS1, SVS2) between the two information capture regions (IEB1, IEB2) and an item of tracking information (SVI) is generated, otherwise such an item of tracking information (SVI) is not generated. - Tracking arrangement according to Claim 9, characterized in that
arrangement features a) to c) with respect to the concrete elements stated therein or arrangement features a) and d) to e) with respect to the concrete elements stated therein are contained in a first device (SV, RSU1, RSU2, RSU3) and arrangement features f) to f2) with respect to the concrete elements stated therein are contained in a second device (AWE, ZÜI). - Tracking arrangement according to Claim 9, characterized in that
arrangement features a) to c) with respect to the concrete elements stated therein or arrangement features a) and d) to e) with respect to the concrete elements stated therein and arrangement features f) to f2) with respect to the concrete elements stated therein are contained in a single device (SV, RSU1, RSU2, RSU3). - Tracking arrangement according to Claim 9, 10 or 11, characterized in that
the object (FZ, FZ1...FZ10, FZ01...FZ09) moving along the tracking route (SVS) in the area is a motor vehicle driving on a road (VKS), in particular a motorway. - Tracking arrangement according to Claim 12, characterized in that
the information (IF1, IF2) with the non-object-identifying parameter data (PD1, PD2) is an "intelligent transport system (ITS)" status message containing data relating to a plurality of vehicle-specific, vehicle-characteristic message parameters. - Tracking arrangement according to Claim 13, characterized in that
the ITS status message is a "cooperative awareness message <CAM>" according to the ETSI standard "ETSI TS 102 637-2" or a "basic safety message <BSM>" according to the SAE standard "SAE J2735". - Tracking arrangement according to Claim 14, characterized in that
the "cooperative awareness message <CAM>" has the following vehicle-specific, vehicle-characteristic message parameters:- type of different vehicles belonging to the road users, for example bus, car, motorcycle, etc., in the group;- time stamp of vehicles belonging to the road users in the group should be close in terms of time;- position of different vehicles belonging to the road users in the group should be adjacent;- direction of vehicles belonging to the road users in the group should be the same;- speed of vehicles belonging to the road users in the group should be comparable;- length of different vehicles belonging to the road users is used as a group identifying feature;- width of different vehicles belonging to the road users is used as a group identifying feature;- issuing authority of the cryptographic certificates for the signature of the status messages;- certificate hierarchy for validating the certificate for the signature of the status messages;- repetition rate of the change of the parameters. - Tracking arrangement according to one of Claims 9 to 15, characterized in that
for the purpose of transmitting the tracking information (SVI), the evaluation device (AWE) is connected to a central monitoring entity (ZÜI), in particular a traffic control centre, with the result that this is used, as a result, to broadcast traffic messages or can be used for cooperative "intelligent transport system (ITS)" traffic systems or traffic telematics systems.
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/EP2016/061793 WO2017202461A1 (en) | 2016-05-25 | 2016-05-25 | Method, device and arrangement for tracking moving objects |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| EP3446302A1 EP3446302A1 (en) | 2019-02-27 |
| EP3446302B1 true EP3446302B1 (en) | 2022-04-20 |
Family
ID=56098229
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP16726841.6A Active EP3446302B1 (en) | 2016-05-25 | 2016-05-25 | Method, device and arrangement for tracking moving objects |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US20230139242A1 (en) |
| EP (1) | EP3446302B1 (en) |
| WO (1) | WO2017202461A1 (en) |
Families Citing this family (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6532617B1 (en) * | 2018-06-06 | 2019-06-19 | 三菱電機株式会社 | Roadside information processing system |
| EP3654676B1 (en) * | 2018-11-16 | 2023-08-23 | Volkswagen Aktiengesellschaft | Method for data communication between at least two participants of a wireless communication system, corresponding control unit and vehicle equipped with a control unit as well as computer program |
| GB202010431D0 (en) * | 2020-07-07 | 2020-08-19 | Canon Res Centre France | Transmitting method in an intelligent transport system |
| CN112712719B (en) * | 2020-12-25 | 2022-05-03 | 阿波罗智联(北京)科技有限公司 | Vehicle control method, vehicle-road coordination system, road side equipment and automatic driving vehicle |
Family Cites Families (33)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE4328939C2 (en) * | 1993-08-28 | 2000-06-21 | Ave Verkehrs Und Informationst | Procedure for recording route-related traffic quantities |
| US6028550A (en) * | 1997-08-08 | 2000-02-22 | Trimble Navigation Limited | Vehicle guidance system using signature zones to detect travel path |
| US6587781B2 (en) * | 2000-08-28 | 2003-07-01 | Estimotion, Inc. | Method and system for modeling and processing vehicular traffic data and information and applying thereof |
| US20030051131A1 (en) * | 2001-08-31 | 2003-03-13 | Juergen Reinold | Vehicle active network with data encryption |
| US8194536B2 (en) * | 2001-08-31 | 2012-06-05 | Continental Automotive Systems, Inc. | Vehicle active network with fault tolerant devices |
| US20030045234A1 (en) * | 2001-08-31 | 2003-03-06 | Remboski Donald J. | Vehicle active network with reserved portions |
| US20030096621A1 (en) * | 2001-11-19 | 2003-05-22 | Rittwik Jana | Method and apparatus for identifying a group of users of a wireless service |
| JP3766909B2 (en) * | 2001-11-30 | 2006-04-19 | 株式会社日立製作所 | Driving environment recognition method and apparatus |
| US7398157B2 (en) * | 2002-03-14 | 2008-07-08 | Nd A Islandi Ehf. | Method and system for determining a track record of a moving object |
| US20070124306A1 (en) * | 2005-11-09 | 2007-05-31 | Honda Motor Co., Ltd. | Method and system for transmitting data to vehicles over limited data links |
| US20080255754A1 (en) * | 2007-04-12 | 2008-10-16 | David Pinto | Traffic incidents processing system and method for sharing real time traffic information |
| US7804423B2 (en) * | 2008-06-16 | 2010-09-28 | Gm Global Technology Operations, Inc. | Real time traffic aide |
| US8295257B2 (en) * | 2009-03-13 | 2012-10-23 | Telcordia Technologies, Inc. | Scalable disruptive-resistant communication method |
| TWI425454B (en) * | 2010-12-28 | 2014-02-01 | Ind Tech Res Inst | Method, system and computer program product for reconstructing moving path of vehicle |
| US9014632B2 (en) * | 2011-04-29 | 2015-04-21 | Here Global B.V. | Obtaining vehicle traffic information using mobile bluetooth detectors |
| US20160239924A1 (en) * | 2011-08-02 | 2016-08-18 | State Farm Mutual Automobile Insurance Company | Data Structures For Providing Customized Marketing Information |
| DE102012216392A1 (en) * | 2011-09-29 | 2013-04-04 | Continental Teves Ag & Co. Ohg | Method and system for the distributed transmission of a communication flow and use of the system |
| EP2575399A1 (en) * | 2011-09-30 | 2013-04-03 | Hitachi, Ltd. | System configured to be communicably connected to network nodes of a communication network |
| US10018703B2 (en) * | 2012-09-13 | 2018-07-10 | Conduent Business Services, Llc | Method for stop sign law enforcement using motion vectors in video streams |
| DE102011085185B3 (en) * | 2011-10-25 | 2013-04-18 | Continental Automotive Gmbh | A method of operating a communication system in the wireless vehicle-to-environment communication and communication system |
| KR101493360B1 (en) * | 2012-07-30 | 2015-02-23 | 주식회사 케이티 | Method of vehicle driving managing through detection state change of around cars and system for it |
| US9088450B2 (en) * | 2012-10-31 | 2015-07-21 | Elwha Llc | Methods and systems for data services |
| JP5772850B2 (en) * | 2013-03-12 | 2015-09-02 | 株式会社デンソー | Information terminal |
| EP2806285B1 (en) * | 2013-05-24 | 2018-12-19 | Nxp B.V. | A vehicle positioning system |
| KR101475040B1 (en) * | 2013-12-23 | 2014-12-24 | 한국교통대학교산학협력단 | Method and System for Providing Social Network Service Based on Traffic Information |
| CA2945957C (en) * | 2014-04-14 | 2023-03-14 | Sirius Xm Radio Inc. | Systems, methods and applications for using and enhancing vehicle to vehicle communications, including synergies and interoperation with satellite radio |
| CN107209993B (en) * | 2014-07-03 | 2020-08-04 | 通用汽车环球科技运作有限责任公司 | Vehicle cognitive radar method and system |
| US9460615B2 (en) * | 2014-09-12 | 2016-10-04 | Umm Al-Qura University | Automatic update of crowd and traffic data using device monitoring |
| JP6501258B2 (en) * | 2015-05-22 | 2019-04-17 | 富士通株式会社 | Evaluation method, evaluation program and information processing apparatus |
| CN107710795B (en) * | 2015-06-24 | 2020-11-24 | 英特尔公司 | Enhanced proximity services (ProSe) protocol for vehicle-to-anything (V2X) communication |
| JP6716833B2 (en) * | 2015-06-25 | 2020-07-01 | インテル・コーポレーション | Discovery and establishment of communication groups for wireless vehicle communication |
| CN107209854A (en) * | 2015-09-15 | 2017-09-26 | 深圳市大疆创新科技有限公司 | For the support system and method that smoothly target is followed |
| US9672734B1 (en) * | 2016-04-08 | 2017-06-06 | Sivalogeswaran Ratnasingam | Traffic aware lane determination for human driver and autonomous vehicle driving system |
-
2016
- 2016-05-25 US US16/304,367 patent/US20230139242A1/en active Pending
- 2016-05-25 EP EP16726841.6A patent/EP3446302B1/en active Active
- 2016-05-25 WO PCT/EP2016/061793 patent/WO2017202461A1/en active Application Filing
Also Published As
| Publication number | Publication date |
|---|---|
| EP3446302A1 (en) | 2019-02-27 |
| WO2017202461A1 (en) | 2017-11-30 |
| US20230139242A1 (en) | 2023-05-04 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| DE102016000532B4 (en) | Method and device for operating a traffic monitoring device, traffic monitoring device and traffic monitoring system | |
| EP0931301B1 (en) | Method and device for transmitting data on traffic assessment | |
| EP0860954B1 (en) | Method pf transfering information between moving objects and communication device using the method | |
| EP2610815B1 (en) | Method for acquiring traffic flow data in a street network | |
| EP2704121B1 (en) | System for identifying users in vehicles | |
| DE102012219631A1 (en) | Method and device for detecting at least one uneven road surface | |
| EP3446302B1 (en) | Method, device and arrangement for tracking moving objects | |
| WO2009027122A1 (en) | Updating unit and method for updating a digital card | |
| EP2171701A1 (en) | Server-based warning of hazards | |
| EP2624231A1 (en) | Devices and method for controlling a road toll system | |
| DE102007042877A1 (en) | Motor vehicle, has computing device designed such that roadway characteristic and appropriate position are converted into roadway characteristic-position-data objects, where objects are transmitted by transmitting device | |
| DE102016006687A1 (en) | Assistance system and method for transmitting data relating to an accident or breakdown of a vehicle | |
| DE102017222751A1 (en) | Method and system for warning road users of a wrong-way driving of a vehicle with supplementary plausibility | |
| DE102012207864A1 (en) | Method for reducing a risk of stowage | |
| DE102010018815A1 (en) | Method and device for generating traffic information | |
| EP2733688B1 (en) | Vehicle information device and method for transmitting road traffic information which is useful in a given area | |
| DE10063588A1 (en) | Determining traffic information for motor vehicle by passive reception of data transmitted from control center to unspecified subscribers using e.g. cell broadcast or DAB | |
| EP2176836A1 (en) | Method for checking a position message of a vehicle emitted from a vehicle and transmission and receiving device for use in a vehicle | |
| EP3279870A1 (en) | Data processing device, system and method for verifying performance of a specified function of a position determination device | |
| DE102012212612A1 (en) | Method for determining residence of user related to vehicle, involves determining state of user based on recognized movement of user and detection of stepping out process of user according to predetermined condition | |
| DE102012102693A1 (en) | Method for providing traffic information in vehicle, involves receiving transmitted traffic information of secondary vehicle through primary communication device and outputting through optical output unit and acoustic output unit | |
| EP1091333A2 (en) | Method for obtaining traffic data using the localisation data from mobile communication systems | |
| EP2922031B1 (en) | Method and devices for error detection in a toll system | |
| DE202016001371U1 (en) | Vehicle device, system and roadside device for performing at least one transaction | |
| DE102019127930B4 (en) | Method for determining the position of a non-motorized road user and traffic facility |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: THE INTERNATIONAL PUBLICATION HAS BEEN MADE |
|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: REQUEST FOR EXAMINATION WAS MADE |
|
| 17P | Request for examination filed |
Effective date: 20181113 |
|
| AK | Designated contracting states |
Kind code of ref document: A1 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| AX | Request for extension of the european patent |
Extension state: BA ME |
|
| DAV | Request for validation of the european patent (deleted) | ||
| DAX | Request for extension of the european patent (deleted) | ||
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: EXAMINATION IS IN PROGRESS |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: EXAMINATION IS IN PROGRESS |
|
| 17Q | First examination report despatched |
Effective date: 20201112 |
|
| GRAP | Despatch of communication of intention to grant a patent |
Free format text: ORIGINAL CODE: EPIDOSNIGR1 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: GRANT OF PATENT IS INTENDED |
|
| INTG | Intention to grant announced |
Effective date: 20211202 |
|
| RAP1 | Party data changed (applicant data changed or rights of an application transferred) |
Owner name: YUNEX GMBH |
|
| GRAS | Grant fee paid |
Free format text: ORIGINAL CODE: EPIDOSNIGR3 |
|
| GRAA | (expected) grant |
Free format text: ORIGINAL CODE: 0009210 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: THE PATENT HAS BEEN GRANTED |
|
| AK | Designated contracting states |
Kind code of ref document: B1 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| REG | Reference to a national code |
Ref country code: GB Ref legal event code: FG4D Free format text: NOT ENGLISH |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: EP |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R096 Ref document number: 502016014794 Country of ref document: DE |
|
| REG | Reference to a national code |
Ref country code: IE Ref legal event code: FG4D Free format text: LANGUAGE OF EP DOCUMENT: GERMAN |
|
| REG | Reference to a national code |
Ref country code: AT Ref legal event code: REF Ref document number: 1485807 Country of ref document: AT Kind code of ref document: T Effective date: 20220515 |
|
| REG | Reference to a national code |
Ref country code: NL Ref legal event code: FP |
|
| REG | Reference to a national code |
Ref country code: LT Ref legal event code: MG9D |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R082 Ref document number: 502016014794 Country of ref document: DE Representative=s name: PATENTANWALTSKANZLEI WILHELM & BECK, DE |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20220420 Ref country code: PT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20220822 Ref country code: NO Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20220720 Ref country code: LT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20220420 Ref country code: HR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20220420 Ref country code: GR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20220721 Ref country code: FI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20220420 Ref country code: ES Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20220420 Ref country code: BG Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20220720 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: RS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20220420 Ref country code: PL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20220420 Ref country code: LV Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20220420 Ref country code: IS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20220820 |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: PL |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R097 Ref document number: 502016014794 Country of ref document: DE |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SM Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20220420 Ref country code: SK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20220420 Ref country code: RO Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20220420 Ref country code: MC Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20220420 Ref country code: LU Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20220525 Ref country code: LI Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20220531 Ref country code: EE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20220420 Ref country code: DK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20220420 Ref country code: CZ Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20220420 Ref country code: CH Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20220531 |
|
| PLBE | No opposition filed within time limit |
Free format text: ORIGINAL CODE: 0009261 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: NO OPPOSITION FILED WITHIN TIME LIMIT |
|
| 26N | No opposition filed |
Effective date: 20230123 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: AL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20220420 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20220525 Ref country code: FR Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20220620 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20220420 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: NL Payment date: 20230519 Year of fee payment: 8 Ref country code: IT Payment date: 20230525 Year of fee payment: 8 Ref country code: DE Payment date: 20230405 Year of fee payment: 8 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: AT Payment date: 20230516 Year of fee payment: 8 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: BE Payment date: 20230517 Year of fee payment: 8 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: GB Payment date: 20230522 Year of fee payment: 8 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: HU Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT; INVALID AB INITIO Effective date: 20160525 |