EP3011190B1 - Actionneur du type à pistons rotatifs à alimentation hydraulique - Google Patents
Actionneur du type à pistons rotatifs à alimentation hydraulique Download PDFInfo
- Publication number
- EP3011190B1 EP3011190B1 EP14736232.1A EP14736232A EP3011190B1 EP 3011190 B1 EP3011190 B1 EP 3011190B1 EP 14736232 A EP14736232 A EP 14736232A EP 3011190 B1 EP3011190 B1 EP 3011190B1
- Authority
- EP
- European Patent Office
- Prior art keywords
- fluid
- rotary
- piston
- actuator
- pressure
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 239000012530 fluid Substances 0.000 claims description 727
- 230000033001 locomotion Effects 0.000 claims description 89
- 238000000034 method Methods 0.000 claims description 53
- 238000004891 communication Methods 0.000 claims description 32
- RZVHIXYEVGDQDX-UHFFFAOYSA-N 9,10-anthraquinone Chemical compound C1=CC=C2C(=O)C3=CC=CC=C3C(=O)C2=C1 RZVHIXYEVGDQDX-UHFFFAOYSA-N 0.000 claims description 30
- 239000000463 material Substances 0.000 claims description 5
- 230000008569 process Effects 0.000 description 26
- 230000000712 assembly Effects 0.000 description 25
- 238000000429 assembly Methods 0.000 description 25
- 230000007246 mechanism Effects 0.000 description 12
- 230000001133 acceleration Effects 0.000 description 11
- 238000010586 diagram Methods 0.000 description 10
- 230000009977 dual effect Effects 0.000 description 10
- 238000007789 sealing Methods 0.000 description 9
- 239000004020 conductor Substances 0.000 description 8
- 238000013461 design Methods 0.000 description 8
- 230000004888 barrier function Effects 0.000 description 6
- 230000007257 malfunction Effects 0.000 description 6
- 230000004048 modification Effects 0.000 description 6
- 238000012986 modification Methods 0.000 description 6
- 230000000717 retained effect Effects 0.000 description 5
- 239000007787 solid Substances 0.000 description 5
- 238000003780 insertion Methods 0.000 description 4
- 230000037431 insertion Effects 0.000 description 4
- 239000013307 optical fiber Substances 0.000 description 4
- XLYOFNOQVPJJNP-UHFFFAOYSA-N water Substances O XLYOFNOQVPJJNP-UHFFFAOYSA-N 0.000 description 4
- 230000009471 action Effects 0.000 description 3
- 239000003570 air Substances 0.000 description 3
- 230000008878 coupling Effects 0.000 description 3
- 238000010168 coupling process Methods 0.000 description 3
- 238000005859 coupling reaction Methods 0.000 description 3
- 239000007789 gas Substances 0.000 description 3
- 239000010720 hydraulic oil Substances 0.000 description 3
- 230000002457 bidirectional effect Effects 0.000 description 2
- -1 e.g. Substances 0.000 description 2
- 230000000694 effects Effects 0.000 description 2
- 230000005484 gravity Effects 0.000 description 2
- 238000012546 transfer Methods 0.000 description 2
- 239000000853 adhesive Substances 0.000 description 1
- 230000001070 adhesive effect Effects 0.000 description 1
- 238000005452 bending Methods 0.000 description 1
- 230000015572 biosynthetic process Effects 0.000 description 1
- 238000006243 chemical reaction Methods 0.000 description 1
- 238000010276 construction Methods 0.000 description 1
- 230000001419 dependent effect Effects 0.000 description 1
- 238000006073 displacement reaction Methods 0.000 description 1
- 238000005516 engineering process Methods 0.000 description 1
- 238000007667 floating Methods 0.000 description 1
- ZZUFCTLCJUWOSV-UHFFFAOYSA-N furosemide Chemical compound C1=C(Cl)C(S(=O)(=O)N)=CC(C(O)=O)=C1NCC1=CC=CO1 ZZUFCTLCJUWOSV-UHFFFAOYSA-N 0.000 description 1
- 239000011796 hollow space material Substances 0.000 description 1
- 238000003754 machining Methods 0.000 description 1
- 230000014759 maintenance of location Effects 0.000 description 1
- 230000000116 mitigating effect Effects 0.000 description 1
- 238000000465 moulding Methods 0.000 description 1
- 238000005192 partition Methods 0.000 description 1
- 230000011664 signaling Effects 0.000 description 1
Images
































Classifications
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F15—FLUID-PRESSURE ACTUATORS; HYDRAULICS OR PNEUMATICS IN GENERAL
- F15B—SYSTEMS ACTING BY MEANS OF FLUIDS IN GENERAL; FLUID-PRESSURE ACTUATORS, e.g. SERVOMOTORS; DETAILS OF FLUID-PRESSURE SYSTEMS, NOT OTHERWISE PROVIDED FOR
- F15B15/00—Fluid-actuated devices for displacing a member from one position to another; Gearing associated therewith
- F15B15/08—Characterised by the construction of the motor unit
- F15B15/12—Characterised by the construction of the motor unit of the oscillating-vane or curved-cylinder type
- F15B15/125—Characterised by the construction of the motor unit of the oscillating-vane or curved-cylinder type of the curved-cylinder type
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F15—FLUID-PRESSURE ACTUATORS; HYDRAULICS OR PNEUMATICS IN GENERAL
- F15B—SYSTEMS ACTING BY MEANS OF FLUIDS IN GENERAL; FLUID-PRESSURE ACTUATORS, e.g. SERVOMOTORS; DETAILS OF FLUID-PRESSURE SYSTEMS, NOT OTHERWISE PROVIDED FOR
- F15B11/00—Servomotor systems without provision for follow-up action; Circuits therefor
- F15B11/16—Servomotor systems without provision for follow-up action; Circuits therefor with two or more servomotors
- F15B11/17—Servomotor systems without provision for follow-up action; Circuits therefor with two or more servomotors using two or more pumps
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F15—FLUID-PRESSURE ACTUATORS; HYDRAULICS OR PNEUMATICS IN GENERAL
- F15B—SYSTEMS ACTING BY MEANS OF FLUIDS IN GENERAL; FLUID-PRESSURE ACTUATORS, e.g. SERVOMOTORS; DETAILS OF FLUID-PRESSURE SYSTEMS, NOT OTHERWISE PROVIDED FOR
- F15B18/00—Parallel arrangements of independent servomotor systems
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F15—FLUID-PRESSURE ACTUATORS; HYDRAULICS OR PNEUMATICS IN GENERAL
- F15B—SYSTEMS ACTING BY MEANS OF FLUIDS IN GENERAL; FLUID-PRESSURE ACTUATORS, e.g. SERVOMOTORS; DETAILS OF FLUID-PRESSURE SYSTEMS, NOT OTHERWISE PROVIDED FOR
- F15B2211/00—Circuits for servomotor systems
- F15B2211/20—Fluid pressure source, e.g. accumulator or variable axial piston pump
- F15B2211/205—Systems with pumps
- F15B2211/20507—Type of prime mover
- F15B2211/20515—Electric motor
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F15—FLUID-PRESSURE ACTUATORS; HYDRAULICS OR PNEUMATICS IN GENERAL
- F15B—SYSTEMS ACTING BY MEANS OF FLUIDS IN GENERAL; FLUID-PRESSURE ACTUATORS, e.g. SERVOMOTORS; DETAILS OF FLUID-PRESSURE SYSTEMS, NOT OTHERWISE PROVIDED FOR
- F15B2211/00—Circuits for servomotor systems
- F15B2211/20—Fluid pressure source, e.g. accumulator or variable axial piston pump
- F15B2211/205—Systems with pumps
- F15B2211/20576—Systems with pumps with multiple pumps
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F15—FLUID-PRESSURE ACTUATORS; HYDRAULICS OR PNEUMATICS IN GENERAL
- F15B—SYSTEMS ACTING BY MEANS OF FLUIDS IN GENERAL; FLUID-PRESSURE ACTUATORS, e.g. SERVOMOTORS; DETAILS OF FLUID-PRESSURE SYSTEMS, NOT OTHERWISE PROVIDED FOR
- F15B2211/00—Circuits for servomotor systems
- F15B2211/20—Fluid pressure source, e.g. accumulator or variable axial piston pump
- F15B2211/265—Control of multiple pressure sources
- F15B2211/2654—Control of multiple pressure sources one or more pressure sources having priority
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F15—FLUID-PRESSURE ACTUATORS; HYDRAULICS OR PNEUMATICS IN GENERAL
- F15B—SYSTEMS ACTING BY MEANS OF FLUIDS IN GENERAL; FLUID-PRESSURE ACTUATORS, e.g. SERVOMOTORS; DETAILS OF FLUID-PRESSURE SYSTEMS, NOT OTHERWISE PROVIDED FOR
- F15B2211/00—Circuits for servomotor systems
- F15B2211/30—Directional control
- F15B2211/305—Directional control characterised by the type of valves
- F15B2211/3056—Assemblies of multiple valves
- F15B2211/30565—Assemblies of multiple valves having multiple valves for a single output member, e.g. for creating higher valve function by use of multiple valves like two 2/2-valves replacing a 5/3-valve
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F15—FLUID-PRESSURE ACTUATORS; HYDRAULICS OR PNEUMATICS IN GENERAL
- F15B—SYSTEMS ACTING BY MEANS OF FLUIDS IN GENERAL; FLUID-PRESSURE ACTUATORS, e.g. SERVOMOTORS; DETAILS OF FLUID-PRESSURE SYSTEMS, NOT OTHERWISE PROVIDED FOR
- F15B2211/00—Circuits for servomotor systems
- F15B2211/30—Directional control
- F15B2211/32—Directional control characterised by the type of actuation
- F15B2211/327—Directional control characterised by the type of actuation electrically or electronically
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F15—FLUID-PRESSURE ACTUATORS; HYDRAULICS OR PNEUMATICS IN GENERAL
- F15B—SYSTEMS ACTING BY MEANS OF FLUIDS IN GENERAL; FLUID-PRESSURE ACTUATORS, e.g. SERVOMOTORS; DETAILS OF FLUID-PRESSURE SYSTEMS, NOT OTHERWISE PROVIDED FOR
- F15B2211/00—Circuits for servomotor systems
- F15B2211/60—Circuit components or control therefor
- F15B2211/625—Accumulators
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F15—FLUID-PRESSURE ACTUATORS; HYDRAULICS OR PNEUMATICS IN GENERAL
- F15B—SYSTEMS ACTING BY MEANS OF FLUIDS IN GENERAL; FLUID-PRESSURE ACTUATORS, e.g. SERVOMOTORS; DETAILS OF FLUID-PRESSURE SYSTEMS, NOT OTHERWISE PROVIDED FOR
- F15B2211/00—Circuits for servomotor systems
- F15B2211/60—Circuit components or control therefor
- F15B2211/63—Electronic controllers
- F15B2211/6303—Electronic controllers using input signals
- F15B2211/6336—Electronic controllers using input signals representing a state of the output member, e.g. position, speed or acceleration
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F15—FLUID-PRESSURE ACTUATORS; HYDRAULICS OR PNEUMATICS IN GENERAL
- F15B—SYSTEMS ACTING BY MEANS OF FLUIDS IN GENERAL; FLUID-PRESSURE ACTUATORS, e.g. SERVOMOTORS; DETAILS OF FLUID-PRESSURE SYSTEMS, NOT OTHERWISE PROVIDED FOR
- F15B2211/00—Circuits for servomotor systems
- F15B2211/60—Circuit components or control therefor
- F15B2211/665—Methods of control using electronic components
- F15B2211/6656—Closed loop control, i.e. control using feedback
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F15—FLUID-PRESSURE ACTUATORS; HYDRAULICS OR PNEUMATICS IN GENERAL
- F15B—SYSTEMS ACTING BY MEANS OF FLUIDS IN GENERAL; FLUID-PRESSURE ACTUATORS, e.g. SERVOMOTORS; DETAILS OF FLUID-PRESSURE SYSTEMS, NOT OTHERWISE PROVIDED FOR
- F15B2211/00—Circuits for servomotor systems
- F15B2211/70—Output members, e.g. hydraulic motors or cylinders or control therefor
- F15B2211/71—Multiple output members, e.g. multiple hydraulic motors or cylinders
- F15B2211/7107—Multiple output members, e.g. multiple hydraulic motors or cylinders the output members being mechanically linked
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F15—FLUID-PRESSURE ACTUATORS; HYDRAULICS OR PNEUMATICS IN GENERAL
- F15B—SYSTEMS ACTING BY MEANS OF FLUIDS IN GENERAL; FLUID-PRESSURE ACTUATORS, e.g. SERVOMOTORS; DETAILS OF FLUID-PRESSURE SYSTEMS, NOT OTHERWISE PROVIDED FOR
- F15B2211/00—Circuits for servomotor systems
- F15B2211/70—Output members, e.g. hydraulic motors or cylinders or control therefor
- F15B2211/71—Multiple output members, e.g. multiple hydraulic motors or cylinders
- F15B2211/7114—Multiple output members, e.g. multiple hydraulic motors or cylinders with direct connection between the chambers of different actuators
- F15B2211/7128—Multiple output members, e.g. multiple hydraulic motors or cylinders with direct connection between the chambers of different actuators the chambers being connected in parallel
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F15—FLUID-PRESSURE ACTUATORS; HYDRAULICS OR PNEUMATICS IN GENERAL
- F15B—SYSTEMS ACTING BY MEANS OF FLUIDS IN GENERAL; FLUID-PRESSURE ACTUATORS, e.g. SERVOMOTORS; DETAILS OF FLUID-PRESSURE SYSTEMS, NOT OTHERWISE PROVIDED FOR
- F15B2211/00—Circuits for servomotor systems
- F15B2211/80—Other types of control related to particular problems or conditions
- F15B2211/875—Control measures for coping with failures
- F15B2211/8757—Control measures for coping with failures using redundant components or assemblies
Definitions
- This invention relates to an actuator device and more particularly to a rotary piston type actuator device wherein the pistons of the rotor are moved by fluid under pressure and wherein the actuator device includes a central actuation assembly adapted for attachment to and external mounting feature on a member to be actuated.
- Rotary hydraulic actuators of various forms are currently used in industrial mechanical power conversion applications. This industrial usage is commonly for applications where continuous inertial loading is desired without the need for load holding for long durations, e.g. hours, without the use of an external fluid power supply.
- Aircraft flight control applications generally implement loaded positional holding, for example, in a failure mitigation mode, using the blocked fluid column to hold position.
- Positional accuracy in load holding by rotary actuators is desired. Positional accuracy can be improved by minimizing internal leakage characteristics inherent to the design of rotary actuators. However, it can be difficult to provide leak-free performance in typical rotary hydraulic actuators, e.g., rotary "vane” or rotary "piston” type configurations.
- EP 0098614(A2 ) describes a rotary assembly has a toroidal cylinder and a toroidal piston disposed therein.
- a radially floating seal is provided between the piston and the cylinder so that when force from pressure within the cylinder is exerted against the end of the piston and the toroidal piston segment flexes into a more straightened configuration, the seal shifts laterally to maintain the pressure with the cylinder.
- FR 2138241 describes a hydraulic servo controller that includes a fixed block and a movable block.
- US 5,054,374 discloses another prior art example.
- this document relates to rotary piston-type actuators.
- a rotary actuator system in a first example related to the claimed invention, includes a first housing defining a first arcuate chamber comprising a first cavity, a first fluid port in fluid communication with the first cavity, and an open end, a rotor assembly rotatably journaled in said first housing and comprising a rotary output shaft and a first rotor arm extending radially outward from the rotary output shaft, an arcuate-shaped first piston disposed in said first housing for reciprocal movement in the first arcuate chamber through the open end, wherein a first seal, the first cavity, and the first piston define a first pressure chamber, and a first portion of the first piston contacts the first rotor arm, a first fluid line coupled to the first fluid port, a high pressure fluid line, a low pressure fluid line, a central pressure source coupled to the high pressure fluid line, and a servo valve positioned between the central pressure source and the rotary actuator and being controllable to selectively connect the first fluid line to the high pressure fluid line and the low pressure
- the first housing can further define a second arcuate chamber comprising a second cavity, and a second fluid port in fluid communication with the second cavity
- the rotor assembly further includes a second rotor arm
- the rotary actuator further including an arcuate-shaped second piston disposed in said first housing for reciprocal movement in the second arcuate chamber, wherein a second seal, the second cavity, and the second piston define a second pressure chamber, and a first portion of the second piston contacts the second rotor arm
- the rotary actuator system further includes a second fluid line coupled to the second fluid port, and the servo valve is further controllable to selectively connect the second fluid line to the high pressure fluid line and the low pressure fluid line to control movement of the rotary actuator.
- the rotary actuator system can include a controller coupled to control the servo valve.
- the rotary actuator system can include a position sensor configured to provide a position feedback signal, wherein the controller is further configured to receive a position feedback signal from the position sensor and control the servo valve based on the position feedback signal.
- the position sensor can be coupled to the rotary output shaft, wherein the controller, the servo, and the position sensor form a feedback loop.
- the position sensor can be a position limit sensor, and the controller is further configured to receive a position limit signal from the position sensor and control the servo valve based on the position limit signal.
- the first seal can be disposed about an interior surface of the open end.
- the first seal can be disposed about the periphery of the first piston.
- the first housing can be formed as a one-piece housing.
- the first seal can be a one-piece seal.
- the first rotor arm can be coupled to a flight control surface of an aircraft.
- the first rotor arm can be coupled to a primary flight control surface of an aircraft.
- the central pressure source can be a central hydraulic system of an aircraft.
- the rotary actuator system can include a central actuation assembly including a central mounting point formed in an external surface of the rotary output shaft, said central mounting point proximal to the longitudinal midpoint of the rotary output shaft, and an actuation arm removably attached at a proximal end to the central mounting point, said actuation arm adapted at a distal end for attachment to an external mounting feature of a member to be actuated.
- a method of rotary actuation includes providing a rotary actuator including a first housing defining a first arcuate chamber comprising a first cavity, a first fluid port in fluid communication with the first cavity, and an open end, a rotor assembly rotatably journaled in said first housing and comprising a rotary output shaft and a first rotor arm extending radially outward from the rotary output shaft; and an arcuate-shaped first piston disposed in said first housing for reciprocal movement in the first arcuate chamber through the open end, wherein a first seal, the first cavity, and the first piston define a first pressure chamber, and a first portion of the first piston contacts the first rotor arm, a first fluid line coupled to the first fluid port, a high pressure fluid line, and a low pressure fluid line, providing a central pressure source coupled to the high pressure fluid line, providing a servo valve positioned between the central pressure source and the rotary actuator, controlling the servo valve to selectively connect
- the first housing can further defines a second arcuate chamber having a second cavity, and a second fluid port in fluid communication with the second cavity
- the rotor assembly includes a second rotor arm
- the rotary actuator includes an arcuate-shaped second piston disposed in said first housing for reciprocal movement in the second arcuate chamber, and a second seal, the second cavity, and the second piston define a second pressure chamber, and a first portion of the second piston contacts the second rotor arm
- a second fluid line is coupled to the second fluid port
- the servo valve is further controllable to selectively connect the second fluid line to the high pressure fluid line and the low pressure fluid line to control movement of the rotary actuator
- the method further includes controlling the servo valve to selectively connect the second fluid line to the high pressure fluid line and the low pressure fluid line to apply pressurized fluid to the second pressure chamber, and urging the second piston partially outward from the second pressure chamber.
- the method can include providing a controller coupled to control the servo valve, and wherein controlling the servo valve further comprises controlling, by the controller, the servo valve to selectively connect the first fluid line to the high pressure fluid line and the low pressure fluid line to apply pressurized fluid to the first pressure chamber.
- the method can also include providing a position sensor configured to provide a position feedback signal indicative of a position of the rotary actuator, receiving, by the controller, a position feedback signal from the position sensor to control the servo valve, and controlling, by the controller, the servo valve to selectively connect the first fluid line to the high pressure fluid line and the low pressure fluid line to apply pressurized fluid to the first pressure chamber based on the position feedback signal.
- the position sensor can be coupled to the rotary output shaft, and the position feedback signal is a rotary position feedback signal.
- the position sensor can be a position limit sensor, and the position feedback signal is a position limit signal. Urging the first piston partially outward from the first pressure chamber to urge rotation of the rotary output shaft in a first direction can include urging rotation of the rotary output shaft to control at least one of the group consisting of rotary output shaft speed, rotary output shaft position, rotary output shaft torque, and rotary output shaft acceleration.
- the method can also include providing a central actuation assembly including a central mounting point formed in an external surface of the rotary output shaft, said central mounting point proximal to the longitudinal midpoint of the rotary output shaft, providing an actuation arm removably attached at a proximal end to the central mounting point, said actuation arm adapted at a distal end for attachment to an external mounting feature of a member to be actuated, urging rotation of the actuation arm, and urging motion of the member to be actuated.
- a rotary actuator system in a third example related to the claimed invention, includes a first housing defining a first arcuate chamber comprising a first cavity, a first fluid port in fluid communication with the first cavity, and an open end, a rotor assembly rotatably journaled in said first housing and comprising a rotary output shaft and a first rotor arm extending radially outward from the rotary output shaft, an arcuate-shaped first piston disposed in said first housing for reciprocal movement in the first arcuate chamber through the open end, wherein a first seal, the first cavity, and the first piston define a first pressure chamber, and a first portion of the first piston contacts the first rotor arm, a first fluid line coupled to the first fluid port, a fluid reservoir, and a fluid pump coupled to the fluid reservoir, the fluid pump being controllable to selectively provide high pressure to the first fluid line to control movement of the rotary actuator, wherein the fluid pump is not connected to a central hydraulic system.
- the first housing can further define a second arcuate chamber comprising a second cavity, and a second fluid port in fluid communication with the second cavity
- the rotor assembly further includes a second rotor arm
- the rotary actuator further includes an arcuate-shaped second piston disposed in said first housing for reciprocal movement in the second arcuate chamber, wherein a second seal, the second cavity, and the second piston define a second pressure chamber, and a first portion of the second piston contacts the second rotor arm
- the rotary actuator further includes a second fluid line coupled to the second fluid port, and the fluid pump is further controllable to selectively provide high pressure to the second fluid line to control movement of only the rotary actuator.
- the rotary actuator system can include a controller coupled to control the fluid pump.
- the rotary actuator system can include a position sensor configured to provide a position feedback signal, wherein the controller is further configured to receive a position feedback signal from the position sensor and control the fluid pump based on the position feedback signal.
- the position sensor can be coupled to the rotary output shaft, wherein the controller, the fluid pump, and the position sensor form a feedback loop.
- the position sensor can be a position limit sensor and the controller can be further configured to receive a position limit signal from the position sensor and control the fluid pump based on the position limit signal.
- the first seal can be disposed about an interior surface of the open end.
- the first seal can be disposed about the periphery of the first piston.
- the first housing can be formed as a one-piece housing.
- the first seal can be a one-piece seal.
- the rotary actuator system can also include a central actuation assembly including a central mounting point formed in an external surface of the rotary output shaft, said central mounting point proximal to the longitudinal midpoint of the rotary output shaft, and an actuation arm removably attached at a proximal end to the central mounting point, said actuation arm adapted at a distal end for attachment to an external mounting feature of a member to be actuated.
- a method of rotary actuation includes providing a rotary actuator including a first housing defining a first arcuate chamber comprising a first cavity, a first fluid port in fluid communication with the first cavity, and an open end, a rotor assembly rotatably journaled in said first housing and comprising a rotary output shaft and a first rotor arm extending radially outward from the rotary output shaft; and an arcuate-shaped first piston disposed in said first housing for reciprocal movement in the first arcuate chamber through the open end, wherein a first seal, the first cavity, and the first piston define a first pressure chamber, and a first portion of the first piston contacts the first rotor arm, and a first fluid line coupled to the first fluid port, providing a fluid reservoir, providing a fluid pump coupled to the fluid reservoir, controlling the fluid pump to selectively provide high pressure to the first fluid line to apply pressurized fluid to the first pressure chamber, and urging the first piston partially outward from the first pressure chamber
- the first housing can also define a second arcuate chamber comprising a second cavity, and a second fluid port in fluid communication with the second cavity
- the rotor assembly further includes a second rotor arm
- the rotary actuator further includes an arcuate-shaped second piston disposed in said first housing for reciprocal movement in the second arcuate chamber, wherein a second seal, the second cavity, and the second piston define a second pressure chamber, and a first portion of the second piston contacts the second rotor arm, wherein a second fluid line is coupled to the second fluid port
- the method further includes controlling the fluid pump to selectively provide high pressure to the second fluid line to apply pressurized fluid to the second pressure chamber, and urging the second piston partially outward from the second pressure chamber.
- the method can also include providing a controller coupled to control the fluid pump, and wherein controlling the fluid pump can include controlling, by the controller, the fluid pump to selectively apply pressurized fluid to the first pressure chamber.
- controlling the fluid pump can include controlling, by the controller, the fluid pump to selectively apply pressurized fluid to the first pressure chamber.
- the method can include providing a position sensor configured to provide a position feedback signal indicative of a position of the rotary actuator, receiving, by the controller, a position feedback signal from the position sensor to control the fluid pump, and controlling, by the controller, the fluid pump to selectively apply pressurized fluid to the first pressure chamber based on the position feedback signal.
- the position sensor can be coupled to the rotary output shaft, and the position feedback signal can be a rotary position feedback signal.
- the position sensor can be a position limit sensor, and the position feedback signal can be a position limit signal.
- Urging the first piston partially outward from the first pressure chamber to urge rotation of the rotary output shaft in a first direction can include urging rotation of the rotary output shaft to control at least one of the group consisting of rotary output shaft speed, rotary output shaft position, rotary output shaft torque, and rotary output shaft acceleration.
- the method can include providing a central actuation assembly including a central mounting point formed in an external surface of the rotary output shaft, said central mounting point proximal to the longitudinal midpoint of the rotary output shaft, providing an actuation arm removably attached at a proximal end to the central mounting point, said actuation arm adapted at a distal end for attachment to an external mounting feature of a member to be actuated, urging rotation of the actuation arm, and urging motion of the member to be actuated.
- a rotary actuator in a fifth example related to the claimed invention, includes a first housing defining a first arcuate chamber comprising a first cavity, a first fluid port in fluid communication with the first cavity, and an open end, a rotor assembly rotatably journaled in said first housing and comprising a rotary output shaft and a first rotor arm extending radially outward from the rotary output shaft, an arcuate-shaped first piston disposed in said first housing for reciprocal movement in the first arcuate chamber through the open end, wherein a first seal, the first cavity, and the first piston define a first pressure chamber, and a first portion of the first piston contacts the first rotor arm, a first fluid line coupled to the first fluid port, a high pressure fluid line, a low pressure fluid line, a central pressure source coupled to the high pressure fluid line, a servo valve positioned between the central pressure source and the rotary actuator, the servo being controllable to selectively connect the first fluid line to the high pressure fluid line and the
- the first housing can also define a second arcuate chamber comprising a second cavity, and a second fluid port in fluid communication with the second cavity
- the rotor assembly further includes a second rotor arm
- the rotary actuator further includes an arcuate-shaped second piston disposed in said first housing for reciprocal movement in the second arcuate chamber, wherein a second seal, the second cavity, and the second piston define a second pressure chamber, and a first portion of the second piston contacts the second rotor arm
- the rotary actuator system further includes a second fluid line coupled to the second fluid port, and the valve block is further controllable to selectively connect the second fluid line to the high pressure fluid line and the low pressure fluid line to control movement of the rotary actuator.
- the rotary actuator system can also include a controller coupled to control the valve block, the fluid pump, and the servo valve.
- the rotary actuator system can include a position sensor configured to provide a position feedback signal, wherein the controller is further configured to receive a position feedback signal from the position sensor and control the servo valve and the fluid pump based on the position feedback signal.
- the position sensor can be coupled to the rotary output shaft, wherein the controller, the servo, and the position sensor form a first feedback loop, and the controller, the fluid pump, and the position sensor form a second feedback loop.
- the position sensor can be a position limit sensor and the controller can be further configured to receive a position limit signal from the position sensor and control the servo valve and the fluid pump based on the position limit signal.
- the first seal can be disposed about an interior surface of the open end.
- the first seal can be disposed about the periphery of the first piston.
- the first housing can be formed as a one-piece housing.
- the first seal can be a one-piece seal.
- the first rotor arm can be coupled to a flight control surface of an aircraft.
- the first rotor arm can be coupled to a primary flight control surface of an aircraft.
- the central pressure source can be a central hydraulic system of an aircraft.
- the rotary actuator system can also include a central actuation assembly including a central mounting point formed in an external surface of the rotary output shaft, said central mounting point proximal to the longitudinal midpoint of the rotary output shaft, and an actuation arm removably attached at a proximal end to the central mounting point, said actuation arm adapted at a distal end for attachment to an external mounting feature of a member to be actuated.
- a central actuation assembly including a central mounting point formed in an external surface of the rotary output shaft, said central mounting point proximal to the longitudinal midpoint of the rotary output shaft, and an actuation arm removably attached at a proximal end to the central mounting point, said actuation arm adapted at a distal end for attachment to an external mounting feature of a member to be actuated.
- a method of rotary actuation includes providing a rotary actuator that includes a first housing defining a first arcuate chamber comprising a first cavity, a first fluid port in fluid communication with the first cavity, and an open end, a rotor assembly rotatably journaled in said first housing and comprising a rotary output shaft and a first rotor arm extending radially outward from the rotary output shaft, an arcuate-shaped first piston disposed in said first housing for reciprocal movement in the first arcuate chamber through the open end, wherein a first seal, the first cavity, and the first piston define a first pressure chamber, and a first portion of the first piston contacts the first rotor arm, a first fluid line coupled to the first fluid port, a high pressure fluid line, and a low pressure fluid line, providing a central pressure source coupled to the high pressure fluid line, providing a servo valve positioned between the central pressure source and the rotary actuator, the servo being controllable to selective
- the first housing can further define a second arcuate chamber having a second cavity, and a second fluid port in fluid communication with the second cavity
- the rotor assembly further includes a second rotor arm
- the rotary actuator further includes an arcuate-shaped second piston disposed in said first housing for reciprocal movement in the second arcuate chamber, wherein a second seal, the second cavity, and the second piston define a second pressure chamber, and a first portion of the second piston contacts the second rotor arm
- the rotary actuator system further includes a second fluid line coupled to the second fluid port, and the valve block is further controllable to selectively connect the second fluid line to the high pressure fluid line and the low pressure fluid line to control movement of the rotary actuator.
- the method can include providing a controller, wherein controlling the servo valve includes controlling, by the controller, the servo valve to selectively connect the first fluid line to the high pressure fluid line and the low pressure fluid line to apply pressurized fluid to the first pressure chamber, wherein controlling the fluid pump comprises controlling, by the controller, the fluid pump to selectively apply pressurized fluid to the first pressure chamber, and wherein controlling the valve block includes controlling, by the controller, the valve block to selectively connect the servo valve and the fluid pump to the first pressure chamber.
- the method can include providing a position sensor configured to provide a position feedback signal indicative of a position of the rotary actuator, receiving, by the controller, a position feedback signal from the position sensor, wherein the controller, the servo, and the position sensor can form a first feedback loop, and the controller, the fluid pump, and the position sensor can form a second feedback loop, and wherein controlling the servo valve and the fluid pump to apply pressurized fluid to the first pressure chamber based on the position feedback signal.
- the position sensor can be coupled to the rotary output shaft, the position feedback signal can be a rotary position feedback signal, and the controller can be further configured to receive a rotary position feedback signal from the position sensor and control the servo valve and the fluid pump based on the rotary position feedback signal.
- the position sensor can be a position limit sensor, and the controller can be further configured to receive a position limit signal from the position sensor and control the servo valve and the fluid pump based on the position limit signal.
- the first seal can be disposed about an interior surface of the open end.
- the first seal can be disposed about the periphery of the first piston.
- the first housing can be formed as a one-piece housing.
- the first seal can be a one-piece seal.
- the first rotor arm can be coupled to a flight control surface of an aircraft.
- the first rotor arm can be coupled to a flight control surface of an aircraft.
- the first rotor arm can be coupled to a primary flight control surface of an aircraft.
- the central pressure source can include a central hydraulic system of an aircraft.
- Urging the first piston partially outward from the first pressure chamber to urge rotation of the rotary output shaft in a first direction can further include urging rotation of the rotary output shaft to control at least one of the group consisting of rotary output shaft speed, rotary output shaft position, rotary output shaft torque, and rotary output shaft acceleration.
- the method can include providing a central actuation assembly including a central mounting point formed in an external surface of the rotary output shaft, said central mounting point proximal to the longitudinal midpoint of the rotary output shaft, providing an actuation arm removably attached at a proximal end to the central mounting point, said actuation arm adapted at a distal end for attachment to an external mounting feature of a member to be actuated, urging rotation of the actuation arm, and urging motion of the member to be actuated.
- a rotary actuator system in a seventh example related to the claimed invention, includes a first housing defining a first arcuate chamber comprising a first cavity, a second cavity, a first fluid port in fluid communication with the first cavity, a second fluid port in fluid communication with the second cavity, a first open end, and a second open end, a rotor assembly rotatably journaled in said first housing and comprising a rotary output shaft, a first rotor arm extending radially outward from the rotary output shaft, and a second rotor arm extending radially outward from the rotary output shaft, an arcuate-shaped first piston disposed in said first housing for reciprocal movement in the first arcuate chamber through the first open end, wherein a first seal, the first cavity, and the first piston define a first pressure chamber, and a first portion of the first piston contacts the first rotor arm, an arcuate-shaped second piston disposed in said second housing for reciprocal movement in the second arcuate chamber through the second open end, where
- the fluid pump may not be connected to a central hydraulic system.
- the rotary actuator system can include a first controller coupled to control the servo valve and a second controller coupled to control the fluid pump.
- the rotary actuator system can include a position sensor configured to provide a position feedback signal, wherein the first controller is further configured to receive a position feedback signal from the position sensor and control the servo valve based on the position feedback signal and the second controller is further configured to receive the position feedback signal from the position sensor and control the fluid pump based on the position feedback signal.
- the position sensor can be coupled to the rotary output shaft, wherein the first controller, the servo, and the position sensor comprise a first feedback loop and the second controller, the fluid pump, and the position sensor comprise a second feedback loop.
- the position sensor can be a position limit sensor, and the first controller and the second controller can be further configured to receive a position limit signal from the position sensor and control the servo valve and the fluid pump based on the position limit signal.
- the first seal can be disposed about an interior surface of the open end.
- the first seal can be disposed about the periphery of the first piston.
- the first housing can be formed as a one-piece housing.
- the first seal can be a one-piece seal.
- the first rotor arm can be coupled to a flight control surface of an aircraft.
- the first rotor arm can be coupled to a primary flight control surface of an aircraft.
- the central pressure source can include a central hydraulic system of an aircraft.
- the rotary actuator system can include a central actuation assembly including a central mounting point formed in an external surface of the rotary output shaft, said central mounting point proximal to the longitudinal midpoint of the rotary output shaft, and an actuation arm removably attached at a proximal end to the central mounting point, said actuation arm adapted at a distal end for attachment to an external mounting feature of a member to be actuated.
- a method of rotary actuation includes providing a rotary actuator that includes a first housing defining a first arcuate chamber comprising a first cavity, a second cavity, a first fluid port in fluid communication with the first cavity, a second fluid port in fluid communication with the second cavity, a first open end, and a second open end, a rotor assembly rotatably journaled in said first housing and comprising a rotary output shaft, a first rotor arm extending radially outward from the rotary output shaft, and a second rotor arm extending radially outward from the rotary output shaft, an arcuate-shaped first piston disposed in said first housing for reciprocal movement in the first arcuate chamber through the first open end, wherein a first seal, the first cavity, and the first piston define a first pressure chamber, and a first portion of the first piston contacts the first rotor arm, an arcuate-shaped second piston disposed in said second housing for reciprocal movement in the second arcu
- the method wherein the fluid pump is not connected to a central hydraulic system.
- the method can also include providing a first controller coupled to control the servo valve, and providing a second controller coupled to control the fluid pump.
- the method can also include providing a position sensor configured to provide a position feedback signal indicative of a position of the rotary actuator, receiving, at the first controller and the second controller, position feedback signal from the position sensor, controlling, by first controller, the servo valve based on the position feedback signal, and controlling, by the second controller, the fluid pump based on the position feedback signal.
- the position sensor can be coupled to the rotary output shaft, wherein the first controller, the servo, and the position sensor form a first feedback loop and the second controller, the fluid pump, and the position sensor form a second feedback loop.
- the position sensor can be a position limit sensor, and the first controller and the second controller can be further configured to receive a position limit signal from the position sensor and control the servo valve and the fluid pump based on the position limit signal.
- the first seal can be disposed about an interior surface of the open end.
- the first seal can be disposed about the periphery of the first piston.
- the first housing can be formed as a one-piece housing.
- the first seal can be a one-piece seal.
- the first rotor arm can be coupled to a flight control surface of an aircraft.
- the first rotor arm can be coupled to a primary flight control surface of an aircraft.
- the central pressure source can include a central hydraulic system of an aircraft. Urging the first piston partially outward from the first pressure chamber to urge rotation of the rotary output shaft in a first direction can include urging rotation of the rotary output shaft to control at least one of the group consisting of rotary output shaft speed, rotary output shaft position, rotary output shaft torque, and rotary output shaft acceleration.
- the method can also include providing a central actuation assembly including a central mounting point formed in an external surface of the rotary output shaft, said central mounting point proximal to the longitudinal midpoint of the rotary output shaft, providing an actuation arm removably attached at a proximal end to the central mounting point, said actuation arm adapted at a distal end for attachment to an external mounting feature of a member to be actuated, urging rotation of the actuation arm, and urging motion of the member to be actuated.
- a controller-based actuation system can utilize the performance characteristics of a rotary piston actuator.
- a rotary actuator can be operated using fluid supplied locally and/or from a central fluid supply.
- rotary actuator can be redundantly supplied with pressurized fluid from one or more local and/or central fluid supplies.
- This document describes devices for producing rotary motion.
- this document describes devices that can convert fluid displacement into rotary motion through the use of components more commonly used for producing linear motion, e.g., hydraulic or pneumatic linear cylinders.
- Vane-type rotary actuators are relatively compact devices used to convert fluid motion into rotary motion.
- Rotary vane actuators RVA
- Rotary vane actuators generally use seals and component configurations that exhibit cross-vane leakage of the driving fluid. Such leakage can affect the range of applications in which such designs can be used.
- Some applications may require a rotary actuator to hold a rotational load in a selected position for a predetermined length of time, substantially without rotational movement (e.g., less than 5 degrees of movement), when the actuator's fluid ports are blocked.
- some aircraft applications may require that an actuator hold a flap or other control surface that is under load (e.g., through wind resistance, gravity or g-forces) at a selected position when the actuator's fluid ports are blocked.
- Cross-vane leakage can allow movement from the selected position.
- Linear pistons use relatively mature sealing technology that exhibits well-understood dynamic operation and leakage characteristics that are generally better than rotary vane actuator type seals.
- Linear pistons require additional mechanical components in order to adapt their linear motions to rotary motions.
- Such linear-to-rotary mechanisms are generally larger and heavier than rotary vane actuators that are capable of providing similar rotational actions, e.g., occupying a larger work envelope.
- Such linear-to-rotary mechanisms may also generally be installed in an orientation that is different from that of the load they are intended to drive, and therefore may provide their torque output indirectly, e.g., installed to push or pull a lever arm that is at a generally right angle to the axis of the axis of rotation of the lever arm.
- Such linear-to-rotary mechanisms may therefore become too large or heavy for use in some applications, such as aircraft control where space and weight constraints may make such mechanisms impractical for use.
- rotary piston assemblies use curved pressure chambers and curved pistons to controllably push and pull the rotor arms of a rotor assembly about an axis.
- certain embodiments of the rotary piston assemblies described herein can provide the positional holding characteristics generally associated with linear piston-type fluid actuators, to rotary applications, and can do so using the relatively more compact and lightweight envelopes generally associated with rotary vane actuators.
- FIGs. 1-3 show various views of the components of an example rotary piston-type actuator 100.
- the actuator 100 includes a rotary piston assembly 200 and a pressure chamber assembly 300.
- the actuator 100 includes a first actuation section 110 and a second actuation section 120.
- the first actuation section 110 is configured to rotate the rotary piston assembly 200 in a first direction, e.g., counter-clockwise
- the second actuation section 120 is configured to rotate the rotary piston assembly 200 in a second direction opposite the first direction, e.g., clockwise.
- the rotary piston assembly 200 includes a rotor shaft 210.
- a plurality of rotor arms 212 extend radially from the rotor shaft 210, the distal end of each rotor arm 212 including a bore (not shown) substantially aligned (e.g., +/- 2 degrees) with the axis of the rotor shaft 210 and sized to accommodate one of the collection of connector pins 214.
- the first actuation section 110 includes a pair of rotary pistons 250
- the second actuation section 120 includes a pair of rotary pistons 260.
- the example actuator 100 includes two pairs of the rotary pistons 250, 260
- other embodiments can include greater and/or lesser numbers of cooperative and opposing rotary pistons. Examples of other such embodiments will be discussed below, for example, in the descriptions of FIGs. 4-25 .
- each of the rotary pistons 250, 260 includes a piston end 252 and one or more connector arms 254.
- the piston end 252 is formed to have a generally semi-circular body having a substantially smooth surface (e.g., a surface quality that can form a fluid barrier when in contact with a seal).
- Each of the connector arms 254 includes a bore 256 substantially aligned (e.g., +/- 2 degrees) with the axis of the semi-circular body of the piston end 252 and sized to accommodate one of the connector pins 214.
- the rotary pistons 260 in the example assembly of FIG. 2 are oriented opposite each other in the same rotational direction.
- the rotary pistons 250 are oriented opposite each other in the same rotational direction, but opposite that of the rotary pistons 260.
- the actuator 100 can rotate the rotor shaft 210 about 60 degrees total.
- Each of the rotary pistons 250, 260 of the example assembly of FIG. 2 may be assembled to the rotor shaft 210 by aligning the connector arms 254 with the rotor arms 212 such that the bores (not shown) of the rotor arms 212 align with the bores 265.
- the connector pins 214 may then be inserted through the aligned bores to create hinged connections between the pistons 250, 260 and the rotor shaft 210.
- Each connector pin 214 is slightly longer than the aligned bores.
- each connector pin 214 that extends beyond the aligned bores is a circumferential recess (not shown) that can accommodate a retaining fastener (not shown), e.g., a snap ring or spiral ring.
- a retaining fastener e.g., a snap ring or spiral ring.
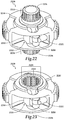
- FIG. 3 is a perspective cross-sectional view of the example rotary piston-type actuator 100.
- the illustrated example shows the rotary pistons 260 inserted into a corresponding pressure chamber 310 formed as an arcuate cavity in the pressure chamber assembly 300.
- the rotary pistons 250 are also inserted into corresponding pressure chambers 310, not visible in this view.
- each pressure chamber 310 includes a seal assembly 320 about the interior surface of the pressure chamber 310 at an open end 330.
- the seal assembly 320 can be a circular or semi-circular sealing geometry retained on all sides in a standard seal groove.
- commercially available reciprocating piston or cylinder type seals can be used.
- commercially available seal types that may already be in use for linear hydraulic actuators flying on current aircraft may demonstrate sufficient capability for linear load and position holding applications.
- the sealing complexity of the actuator 100 may be reduced by using a standard, e.g., commercially available, semi-circular, unidirectional seal designs generally used in linear hydraulic actuators.
- the seal assembly 320 can be a one-piece seal.
- the seal assembly 320 may be included as part of the rotary pistons 250, 260.
- the seal assembly 320 may be located near the piston end 252, opposite the connector arm 254, and slide along the interior surface of the pressure chamber 310 to form a fluidic seal as the rotary piston 250, 260 moves in and out of the pressure chamber 310.
- An example actuator that uses such piston-mounted seal assemblies will be discussed in the descriptions of FIGs. 26-28 .
- the seal 310 can act as a bearing.
- the seal assembly 320 may provide support for the piston 250, 260 as it moves in and out of the pressure chamber 310.
- the actuator 100 may include a wear member between the piston 250, 260 and the pressure chamber 310.
- a wear ring may be included in proximity to the seal assembly 320. The wear ring may act as a pilot for the piston 250, 260, and/or act as a bearing providing support for the piston 250, 260.
- each of the seal assemblies 320 contacts the interior surface of the pressure chamber 310 and the substantially smooth surface (e.g., a surface quality that can form a fluid barrier when in contact with a seal) surface of the piston end 252 to form a substantially pressure-sealed (e.g., less than 10% pressure drop per hour) region within the pressure chamber 310.
- Each of the pressure chambers 310 may include a fluid port 312 formed through the pressure chamber assembly 300, through which pressurized fluid may flow.
- pressurized fluid e.g., hydraulic oil, water, air, gas
- pressurized fluid e.g., hydraulic oil, water, air, gas
- cooperative pressure chambers may be fluidically connected by internal or external fluid ports.
- the pressure chambers 310 of the first actuation section 110 may be fluidically interconnected to balance the pressure between the pressure chambers 310.
- the pressure chambers 310 of the second actuation section 120 may be fluidically interconnected to provide similar pressure balancing.
- the pressure chambers 310 may be fluidically isolated from each other.
- the pressure chambers 310 may each be fed by an independent supply of pressurized fluid.
- the use of the alternating arcuate, e.g., curved, rotary pistons 250, 260 arranged opposing each other operates to translate the rotor arms in an arc-shaped path about the axis of the rotary piston assembly 200, thereby rotating the rotor shaft 210 clockwise and counter-clockwise in a substantially (e.g., within 10%) torque balanced arrangement.
- Each cooperative pair of pressure chambers 310 operates unidirectionally in pushing the respective rotary piston 250 outward, e.g., extension, to drive the rotor shaft 210 in the specific direction.
- the opposing cylinder section's 110 pressure chambers 260 are pressurized to extend their corresponding rotary pistons 260 outward.
- the pressure chamber assembly 300 includes a collection of openings 350.
- the openings 350 provide space in which the rotor arms 212 can move when the rotor shaft 210 is partly rotated.
- the openings 350 can be formed to remove material from the pressure chamber assembly 300, e.g., to reduce the mass of the pressure chamber assembly 300.
- the openings 350 can be used during the process of assembly of the actuator 100.
- the actuator 100 can be assembled by inserting the rotary pistons 250, 260 through the openings 350 such that the piston ends 252 are inserted into the pressure chambers 310.
- the rotor shaft 210 can be assembled to (e.g., rotatably journaled within) the actuator 100 by aligning the rotor shaft 210 with an axial bore 360 formed along the axis of the pressure chamber assembly 300, and by aligning the rotor arms 212 with a collection of keyways 362 formed along the axis of the pressure chamber assembly 300.
- the rotor shaft 210 can then be inserted into the pressure chamber assembly 300.
- the rotary pistons 250, 260 can be partly extracted from the pressure chambers 310 to substantially align the bores 256 with the bores of the rotor arms 212 (e.g., +/-2 degrees).
- the connector pins 214 can then be passed through the keyways 362 and the aligned bores to connect the rotary pistons 250, 260 to the rotor shaft 210.
- the connector pins 214 can be secured longitudinally by inserting retaining fasteners through the openings 350 and about the ends of the connector pins 214.
- the rotor shaft 210 can be connected to an external mechanism as an output shaft in order to transfer the rotary motion of the actuator 100 to other mechanisms.
- a bushing or bearing 362 is fitted between the rotor shaft 210 and the axial bore 360 at each end of the pressure chamber assembly 300.
- the rotary pistons 250, 260 may urge rotation of the rotor shaft 210 by contacting the rotor arms 212.
- the piston ends 252 may not be coupled to the rotor arms 212. Instead, the piston ends 252 may contact the rotor arms 212 to urge rotation of the rotor shaft as the rotary pistons 250, 260 are urged outward from the pressure chambers 310. Conversely, the rotor arms 212 may contact the piston ends 252 to urge the rotary pistons 250, 260 back into the pressure chambers 310.
- a rotary position sensor assembly (not shown) may be included in the actuator 100.
- an encoder may be used to sense the rotational position of the rotor shaft 210 relative to the pressure chamber assembly or another feature that remains substantially stationary (e.g., +/- 5 degrees) relative to the rotation of the shaft 210.
- the rotary position sensor may provide signals that indicate the position of the rotor shaft 210 to other electronic or mechanical modules, e.g., a position controller.
- pressurized fluid in the example actuator 100 can be applied to the pressure chambers 310 of the second actuation section 120 through the fluid ports 312.
- the fluid pressure urges the rotary pistons 260 out of the pressure chambers 310.
- This movement urges the rotary piston assembly 200 to rotate clockwise.
- Pressurized fluid can be applied to the pressure chambers 310 of the first actuation section 110 through the fluid ports 312.
- the fluid pressure urges the rotary pistons 250 out of the pressure chambers 310.
- This movement urges the rotary piston assembly 200 to rotate counter-clockwise.
- the fluid conduits can also be blocked fluidically to cause the rotary piston assembly 200 to substantially maintain its rotary position relative to the pressure chamber assembly 300 (e.g., +/- 5 degrees).
- the pressure chamber assembly 300 is formed from a single piece of material.
- the pressure chambers 310, the openings 350, the fluid ports 312, the keyways 362, and the axial bore 360 may be formed by molding, machining, or otherwise forming a unitary piece of material.
- FIG. 4 is a perspective view of another example rotary piston-type actuator 400.
- the actuator 400 is similar to the actuator 100, but instead of using opposing pairs of rotary pistons 250, 260, each acting unidirectionally to provide clockwise and counter-clockwise rotation, the actuator 400 uses a pair of bidirectional rotary pistons.
- the actuator 400 includes a rotary piston assembly that includes a rotor shaft 412 and a pair of rotary pistons 414.
- the rotor shaft 412 and the rotary pistons 414 are connected by a pair of connector pins 416.
- the example actuator shown in FIG. 4 includes a pressure chamber assembly 420.
- the pressure chamber assembly 420 includes a pair of pressure chambers 422 formed as arcuate cavities in the pressure chamber assembly 420.
- Each pressure chamber 422 includes a seal assembly 424 about the interior surface of the pressure chamber 422 at an open end 426.
- the seal assemblies 424 contact the inner walls of the pressure chambers 422 and the rotary pistons 414 to form fluidic seals between the interiors of the pressure chambers 422 and the space outside.
- a pair of fluid ports 428 is in fluidic communication with the pressure chambers 422.
- pressurized fluid can be applied to the fluid ports 428 to urge the rotary pistons 414 partly out of the pressure chambers 422, and to urge the rotor shaft 412 to rotate in a first direction, e.g., clockwise in this example.
- the pressure chamber assembly 420 and the rotor shaft 412 and rotary pistons 414 of the rotary piston assembly may be structurally similar to corresponding components found in to the second actuation section 120 of the actuator 100.
- the example actuator 400 also functions substantially similarly to the actuator 100 when rotating in a first direction when the rotary pistons 414 are being urged outward from the pressure chambers 422. e.g., clockwise in this example.
- the actuator 400 differs from the actuator 100 in the way that the rotor shaft 412 is made to rotate in a second direction, e.g., counter-clockwise in this example.
- the example actuator 400 includes an outer housing 450 with a bore 452.
- the pressure chamber assembly 420 is formed to fit within the bore 452.
- the bore 452 is fluidically sealed by a pair of end caps (not shown). With the end caps in place, the bore 452 becomes a pressurizable chamber. Pressurized fluid can flow to and from the bore 452 through a fluid port 454. Pressurized fluid in the bore 452 is separated from fluid in the pressure chambers 422 by the seals 426.
- the example actuator 400 is shown in a first configuration in which the rotor shaft 412 has been rotated in a first direction, e.g., clockwise, as indicated by the arrows 501.
- the rotor shaft 412 can be rotated in the first direction by flowing pressurized fluid into the pressure chambers 422 through the fluid ports 428, as indicated by the arrows 502.
- the pressure within the pressure chambers 422 urges the rotary pistons 414 partly outward from the pressure chambers 422 and into the bore 452. Fluid within the bore 452, separated from the fluid within the pressure chambers 422 by the seals 424 and displaced by the movement of the rotary pistons 414, is urged to flow out the fluid port 454, as indicated by the arrow 503.
- the example actuator 400 is shown in a second configuration in which the rotor shaft 412 has been rotated in a second direction, e.g., counter-clockwise, as indicated by the arrows 601.
- the rotor shaft 412 can be rotated in the second direction by flowing pressurized fluid into the bore 452 through the fluid port 454, as indicated by the arrow 602.
- the pressure within the bore 452 urges the rotary pistons 414 partly into the pressure chambers 422 from the bore 452.
- Fluid within the pressure chambers 422, separated from the fluid within the bore 452 by the seals 424 and displaced by the movement of the rotary pistons 414, is urged to flow out the fluid ports 428, as indicated by the arrows 603.
- one or more of the fluid ports 428 and 454 can be oriented radially relative to the axis of the actuator 400, as illustrated in FIGs. 4-6 , however in some embodiments one or more of the fluid ports 428 and 454 can be oriented parallel to the axis of the actuator 400 or in any other appropriate orientation.
- FIG. 7 is a perspective view of another embodiment of a rotary piston assembly 700.
- a first actuation section 710 includes four rotary pistons 712 cooperatively operable to urge a rotor shaft 701 in a first direction.
- a second actuation section 720 includes four rotary pistons 722 cooperatively operable to urge the rotor shaft 701 in a second direction.
- any appropriate number of rotary pistons may be used in cooperation and/or opposition.
- opposing rotary pistons may not be segregated into separate actuation sections, e.g., the actuation sections 710 and 720.
- cooperative pairs of rotary pistons are used in the examples of actuators 100, 400, and assembly 700, other embodiments exist. For example, clusters of two, three, four, or more cooperative or oppositional rotary pistons and pressure chambers may be arranged radially about a section of a rotor shaft.
- a single rotary piston may be located at a section of a rotor shaft.
- cooperative rotary pistons may be interspersed alternatingly with opposing rotary pistons.
- the rotary pistons 712 may alternate with the rotary pistons 722 along the rotor shaft 701.
- FIG. 8 is a perspective view of another example of a rotary piston-type actuator 800.
- the actuator 800 differs from the example actuators 100 and 400, and the example assembly 700 in that instead of implementing cooperative pairs of rotary pistons along a rotor shaft, e.g., two of the rotary pistons 250 are located radially about the rotor shaft 210, individual rotary pistons are located along a rotor shaft.
- the example actuator 800 includes a rotor shaft 810 and a pressure chamber assembly 820.
- the actuator 800 includes a first actuation section 801 and a second actuation section 802.
- the first actuation section 801 is configured to rotate the rotor shaft 810 in a first direction, e.g., clockwise
- the second actuation section 802 is configured to rotate the rotor shaft 810 in a second direction opposite the first direction, e.g., counter-clockwise.
- the first actuation section 801 of example actuator 800 includes a rotary piston 812, and the second actuation section 802 includes a rotary piston 822.
- a relatively greater range of rotary travel may be achieved compared to actuators that use pairs of rotary pistons at a given longitudinal position along the rotary piston assembly, e.g., the actuator 100.
- the actuator 800 can rotate the rotor shaft 810 about 145 degrees total.
- the use of multiple rotary pistons 812, 822 along the rotor shaft 810 can reduce distortion of the pressure chamber assembly 820, e.g., reduce bowing out under high pressure. In some embodiments, the use of multiple rotary pistons 812, 822 along the rotor shaft 810 can provide additional degrees of freedom for each piston 812, 822. In some embodiments, the use of multiple rotary pistons 812, 822 along the rotor shaft 810 can reduce alignment issues encountered during assembly or operation. In some embodiments, the use of multiple rotary pistons 812, 822 along the rotor shaft 810 can reduce the effects of side loading of the rotor shaft 810.
- FIG. 9 shows the example actuator 800 with the rotary piston 812 in an extended configuration.
- a pressurized fluid is applied to a fluid port 830 to pressurize an arcuate pressure chamber 840 formed in the pressure chamber assembly 820.
- Pressure in the pressure chamber 840 urges the rotary piston 812 partly outward, urging the rotor shaft 810 to rotate in a first direction, e.g., clockwise.
- FIG. 10 shows the example actuator 800 with the rotary piston 812 in a retracted configuration.
- Mechanical rotation of the rotor shaft 810 e.g., pressurization of the actuation section 820, urges the rotary piston 812 partly inward, e.g., clockwise.
- Fluid in the pressure chamber 840 displaced by the rotary piston 812 flows out through the fluid port 830.
- the example actuator 800 can be assembled by inserting the rotary piston 812 into the pressure chamber 840. Then the rotor shaft 810 can be inserted longitudinally through a bore 850 and a keyway 851. The rotary piston 812 is connected to the rotor shaft 810 by a connecting pin 852.
- FIG. 11 is a perspective view of another example of a rotary piston-type actuator 1100.
- the actuator 1100 is similar to the example actuator 800, except multiple rotary pistons are used in each actuation section.
- the example actuator 1100 includes a rotary piston assembly 1110 and a pressure chamber assembly 1120.
- the actuator 1100 includes a first actuation section 1101 and a second actuation section 1102.
- the first actuation section 1101 is configured to rotate the rotary piston assembly 1110 in a first direction, e.g., clockwise
- the second actuation section 1102 is configured to rotate the rotary piston assembly 1110 in a second direction opposite the first direction, e.g., counter-clockwise.
- the first actuation section 1101 of example actuator 1100 includes a collection of rotary pistons 812, and the second actuation section 1102 includes a collection of rotary pistons 822.
- the actuator 1100 can rotate the rotor shaft 1110 about 60 degrees total.
- the use of the collection of rotary pistons 812 may provide mechanical advantages in some applications.
- the use of multiple rotary pistons 812 may reduce stress or deflection of the rotary piston assembly, may reduce wear of the seal assemblies, or may provide more degrees of freedom.
- providing partitions, e.g., webbing, between chambers can add strength to the pressure chamber assembly 1120 and can reduce bowing out of the pressure chamber assembly 1120 under high pressure.
- placement of an end tab on the rotor shaft assembly 1110 can reduce cantilever effects experienced by the actuator 800 while under load, e.g., less stress or bending.
- FIGs. 12-14 are perspective and cross-sectional views of another example rotary piston-type actuator 1200.
- the actuator 1200 includes a rotary piston assembly 1210, a first actuation section 1201, and a second actuation section 1202.
- the rotary piston assembly 1210 of example actuator 1200 includes a rotor shaft 1212, a collection of rotor arms 1214, and a collection of dual rotary pistons 1216.
- Each of the dual rotary pistons 1216 includes a connector section 1218 a piston end 1220a and a piston end 1220b.
- the piston ends 1220a-1220b are arcuate in shape, and are oriented opposite to each other in a generally semicircular arrangement, and are joined at the connector section 1218.
- a bore 1222 is formed in the connector section 1218 and is oriented substantially parallel (e.g., +/- 5 degrees) to the axis of the semicircle formed by the piston ends 1220a-1220b.
- the bore 1222 is sized to accommodate a connector pin (not shown) that is passed through the bore 1222 and a collection of bores 1224 formed in the rotor arms 1213 to secure each of the dual rotary pistons 1216 to the rotor shaft 1212.
- the first actuation section 1201 of example actuator 1200 includes a first pressure chamber assembly 1250a, and the second actuation section 1202 includes a second pressure chamber assembly 1250b.
- the first pressure chamber assembly 1250a includes a collection of pressure chambers 1252a formed as arcuate cavities in the first pressure chamber assembly 1250a.
- the second pressure chamber assembly 1250b includes a collection of pressure chambers 1252b formed as arcuate cavities in the first pressure chamber assembly 1250b.
- each of the pressure chambers 1252a lies generally in a plane with a corresponding one of the pressure chambers 1252b, such that a pressure chamber 1252a and a pressure chamber 1252b occupy two semicircular regions about a central axis.
- a semicircular bore 1253a and a semicircular bore 1253b substantially align (e.g., +/- 5 degrees) to accommodate the rotor shaft 1212.
- Each of the pressure chambers 1252a-1252b of example actuator 1200 includes an open end 1254 and a seal assembly 1256.
- the open ends 1254 are formed to accommodate the insertion of the piston ends 1220a-1220b.
- the seal assemblies 1256 contact the inner walls of the pressure chambers 1252a-1252b and the outer surfaces of the piston ends 1220a-1220b to form a fluidic seal.
- the rotary piston assembly 1210 of example actuator 1200 can be assembled by aligning the bores 1222 of the dual rotary pistons 1216 with the bores 1224 of the rotor arms 1214.
- the connector pin (not shown) is passed through the bores 1222 and 1224 and secured longitudinally by retaining fasteners.
- the example actuator 1200 can be assembled by positioning the rotor shaft 1212 abutting the semicircular bore 1253a and rotating it to insert the piston ends 1220a into the pressure chambers 1252a.
- the second pressure chamber 1252b is positioned abutting the first pressure chamber 1252a such that the semicircular bore 1253b contacts the rotor shaft 1212.
- the rotary piston assembly 1210 is then rotated to partly insert the piston ends 1220b into the pressure chambers 1252b.
- An end cap 1260 is fastened to the longitudinal ends 1262a of the pressure chambers 1252a-1252b.
- a second end cap (not shown) is fastened to the longitudinal ends 1262b of the pressure chambers 1252a-1252b.
- the end caps substantially maintain the positions of the rotary piston assembly 1210 and the pressure chambers 1252a-1252b relative to each other (e.g., +/- 5 degrees).
- the actuator 1200 can provide about 90 degrees of total rotational stroke.
- pressurized fluid is applied to the pressure chambers 1252a of example actuator 1200 to rotate the rotary piston assembly 1210 in a first direction, e.g., clockwise.
- Pressurized fluid is applied to the pressure chambers 1252b to rotate the rotary piston assembly 1210 in a second direction, e.g., counter-clockwise.
- FIGs. 15 and 16 are perspective and cross-sectional views of another example rotary piston-type actuator 1500 that includes another example rotary piston assembly 1501.
- the assembly 1501 can be an alternative embodiment of the rotary piston assembly 200 of FIG. 2 .
- the assembly 1501 of example actuator 1500 includes a rotor shaft 1510 connected to a collection of rotary pistons 1520a and a collection of rotary pistons 1520b by a collection of rotor arms 1530 and one or more connector pins (not shown).
- the rotary pistons 1520a and 1520b are arranged along the rotor shaft 1510 in a generally alternating pattern, e.g., one rotary piston 1520a, one rotary piston 1520b, one rotary piston 1520a, one rotary piston 1520b.
- the rotary pistons 1520a and 1520b may be arranged along the rotor shaft 1510 in a generally intermeshed pattern, e.g., one rotary piston 1520a and one rotary piston 1520b rotationally parallel to each other, with connector portions formed to be arranged side-by-side or with the connector portion of rotary piston 1520a formed to one or more male protrusions and/or one or more female recesses to accommodate one or more corresponding male protrusions and/or one or more corresponding female recesses formed in the connector portion of the rotary piston 1520b.
- a generally intermeshed pattern e.g., one rotary piston 1520a and one rotary piston 1520b rotationally parallel to each other, with connector portions formed to be arranged side-by-side or with the connector portion of rotary piston 1520a formed to one or more male protrusions and/or one or more female recesses to accommodate one or more corresponding male protrusions and/or one or more corresponding female recesses formed in the connector
- a pressure chamber assembly 1550 of example actuator 1500 includes a collection of arcuate pressure chambers 1555a and a collection of arcuate pressure chambers 1555b.
- the pressure chambers 1555a and 1555b are arranged in a generally alternating pattern corresponding to the alternating pattern of the rotary pistons 1520a-1520b.
- the rotary pistons 1520a-1520b extend partly into the pressure chambers 1555a-1555b.
- a seal assembly 1560 is positioned about an open end 1565 of each of the pressure chambers 1555a-1555b to form fluidic seals between the inner walls of the pressure chambers 1555a-1555b and the rotary pistons 1520a-1520b.
- pressurized fluid can be alternatingly provided to the pressure chambers 1555a and 1555b of example actuator 1500 to urge the rotary piston assembly 1501 to rotate partly clockwise and counterclockwise.
- the actuator 1500 can rotate the rotor shaft 1510 about 92 degrees total.
- FIGs. 17 and 18 are perspective and cross-sectional views of another example rotary piston-type actuator 1700 that includes another example rotary piston assembly 1701.
- the assembly 1701 can be an alternative embodiment of the rotary piston assembly 200 of FIG. 2 or the assembly 1200 of FIG. 12 .
- the assembly 1701 of example actuator 1700 includes a rotor shaft 1710 connected to a collection of rotary pistons 1720a by a collection of rotor arms 1730a and one or more connector pins 1732.
- the rotor shaft 1710 is also connected to a collection of rotary pistons 1720b by a collection of rotor arms 1730b and one or more connector pins 1732.
- the rotary pistons 1720a and 1720b are arranged along the rotor shaft 1710 in a generally opposing, symmetrical pattern, e.g., one rotary piston 1720a is paired with one rotary piston 1720b at various positions along the length of the assembly 1701.
- a pressure chamber assembly 1750 of example actuator 1700 includes a collection of arcuate pressure chambers 1755a and a collection of arcuate pressure chambers 1755b.
- the pressure chambers 1755a and 1755b are arranged in a generally opposing, symmetrical pattern corresponding to the symmetrical arrangement of the rotary pistons 1720a-1720b.
- the rotary pistons 1720a-1720b extend partly into the pressure chambers 1755a-1755b.
- a seal assembly 1760 is positioned about an open end 1765 of each of the pressure chambers 1755a-1755b to form fluidic seals between the inner walls of the pressure chambers 1755a-1755b and the rotary pistons 1720a-1720b.
- pressurized fluid can be alternatingly provided to the pressure chambers 1755a and 1755b of example actuator 1700 to urge the rotary piston assembly 1701 to rotate partly clockwise and counterclockwise.
- the actuator 1700 can rotate the rotor shaft 1710 about 52 degrees total.
- FIGs. 19 and 20 are perspective and cross-sectional views of another example rotary piston-type actuator 1900.
- the actuators described previously e.g., the example actuator 100 of FIG. 1
- the actuator 1900 is comparatively flatter and more disk-shaped.
- the actuator 1900 includes a rotary piston assembly 1910 and a pressure chamber assembly 1920.
- the rotary piston assembly 1910 includes a rotor shaft 1912.
- a collection of rotor arms 1914 extend radially from the rotor shaft 1912, the distal end of each rotor arm 1914 including a bore 1916 aligned substantially parallel (e.g., +/- 2 degrees) with the axis of the rotor shaft 1912 and sized to accommodate one of a collection of connector pins 1918.
- the rotary piston assembly 1910 of example actuator 1900 includes a pair of rotary pistons 1930 arranged substantially symmetrically opposite each other across the rotor shaft 1912.
- the rotary pistons 1930 are both oriented in the same rotational direction, e.g., the rotary pistons 1930 cooperatively push in the same rotational direction.
- a return force may be provided to rotate the rotary piston assembly 1910 in the direction of the rotary pistons 1930.
- the rotor shaft 1912 may be coupled to a load that resists the forces provided by the rotary pistons 1930, such as a load under gravitational pull, a load exposed to wind or water resistance, a return spring, or any other appropriate load that can rotate the rotary piston assembly.
- the actuator 1900 can include a pressurizable outer housing over the pressure chamber assembly 1920 to provide a back-drive operation , e.g., similar to the function provided by the outer housing 450 in FIG. 4 .
- the actuator 1900 can be rotationally coupled to an oppositely oriented actuator 1900 that can provide a back-drive operation.
- the rotary pistons 1930 can be oriented in opposite rotational directions, e.g., the rotary pistons 1930 can oppose each other push in the opposite rotational directions to provide bidirectional motion control.
- the actuator 100 can rotate the rotor shaft about 60 degrees total.
- Each of the rotary pistons 1930 of example actuator 1900 includes a piston end 1932 and one or more connector arms 1934.
- the piston end 1932 is formed to have a generally semi-circular body having a substantially smooth surface.
- Each of the connector arms 1934 includes a bore 1936 (see FIGs. 21B and 21C ) substantially aligned (e.g., +/- 2 degrees) with the axis of the semi-circular body of the piston end 1932 and sized to accommodate one of the connector pins 1918.
- Each of the rotary pistons 1930 of example actuator 1900 is assembled to the rotor shaft 1912 by aligning the connector arms 1934 with the rotor arms 1914 such that the bores 1916 of the rotor arms 1914 align with the bores 1936.
- the connector pins 1918 are inserted through the aligned bores to create hinged connections between the pistons 1930 and the rotor shaft 1912.
- Each connector pin 1916 is slightly longer than the aligned bores.
- a circumferential recess (not shown) that can accommodate a retaining fastener (not shown), e.g., a snap ring or spiral ring.
- FIG. 20 a cross-sectional view of the example rotary piston-type actuator 1900 is shown.
- the illustrated example shows the rotary pistons 1930 partly inserted into a corresponding pressure chamber 1960 formed as an arcuate cavity in the pressure chamber assembly 1920.
- Each pressure chamber 1960 of example actuator 1900 includes a seal assembly 1962 about the interior surface of the pressure chamber 1960 at an open end 1964.
- the seal assembly 1962 can be a circular or semi-circular sealing geometry retained on all sides in a standard seal groove.
- each of the seal assemblies 1962 contacts the interior surface of the pressure chamber 1960 and the substantially smooth surface of the piston end 1932 to form a substantially pressure-sealed region (e.g., less than 10% pressure drop per hour) within the pressure chamber 1960.
- Each of the pressure chambers 1960 each include a fluid port (not shown) formed through the pressure chamber assembly 1920, through with pressurized fluid may flow.
- pressurized fluid e.g., hydraulic oil, water, air, gas
- the pressure differential between the interior of the pressure chambers 1960 and the ambient conditions outside the pressure chambers 1960 causes the piston ends 1932 to be urged outward from the pressure chambers 1960.
- the pistons 1930 urge the rotary piston assembly 1910 to rotate.
- each of the rotary pistons 1930 includes a cavity 1966.
- FIGs. 21A-21C provide additional cross-sectional and perspective views of one of the rotary pistons 1930. Referring to FIG. 21A , a cross-section the rotary piston 1930, taken across a section of the piston end 1932 is shown. The cavity 1966 is formed within the piston end 1932. Referring to FIG. 21B , the connector arm 1934 and the bore 1936 is shown in perspective. FIG. 21C features a perspective view of the cavity 1966.
- the cavity 1966 may be omitted.
- the piston end 1932 may be solid in cross-section.
- the cavity 1966 may be formed to reduce the mass of the rotary piston 1930 and the mass of the actuator 1900.
- the actuator 1900 may be implemented in an aircraft application, where weight may play a role in actuator selection.
- the cavity 1966 may reduce wear on seal assemblies, such as the seal assembly 320 of FIG. 3 .
- the amount of force the piston end 1932 exerts upon the corresponding seal assembly may be reduced when the mass of the rotary piston is accelerated, e.g., by gravity or G-forces.
- the cavity 1966 may be hollow in cross-section, and include one or more structural members, e.g., webs, within the hollow space.
- structural cross-members may extend across the cavity of a hollow piston to reduce the amount by which the piston may distort, e.g., bowing out, when exposed to a high pressure differential across the seal assembly.
- FIGs. 22 and 23 illustrate a comparison of two example rotor shaft embodiments.
- FIG. 22 is a perspective view of an example rotary piston-type actuator 2200.
- the example actuator 2200 can be the example actuator 1900.
- the example actuator 2200 includes a pressure chamber assembly 2210 and a rotary piston assembly 2220.
- the rotary piston assembly 2220 includes at least one rotary piston 2222 and one or more rotor arms 2224.
- the rotor arms 2224 extend radially from a rotor shaft 2230.
- the rotor shaft 2230 of example actuator includes an output section 2232 and an output section 2234 that extend longitudinally from the pressure chamber assembly 2210.
- the output sections 2232-2234 include a collection of splines 2236 extending radially from the circumferential periphery of the output sections 2232-2234.
- the output section 2232 and/or 2234 may be inserted into a correspondingly formed splined assembly to rotationally couple the rotor shaft 2230 to other mechanisms. For example, by rotationally coupling the output section 2232 and/or 2234 to an external assembly, the rotation of the rotary piston assembly 2220 may be transferred to urge the rotation of the external assembly.
- FIG. 23 is a perspective view of another example rotary piston-type actuator 2300.
- the actuator 2300 includes the pressure chamber assembly 2210 and a rotary piston assembly 2320.
- the rotary piston assembly 2320 includes at least one of the rotary pistons 2222 and one or more of the rotor arms 2224.
- the rotor arms 2224 extend radially from a rotor shaft 2330.
- the rotor shaft 2330 of example actuator 2300 includes a bore 2332 formed longitudinally along the axis of the rotor shaft 2330.
- the rotor shaft 2330 includes a collection of splines 2336 extending radially inward from the circumferential periphery of the bore 2332.
- a correspondingly formed splined assembly may be inserted into the bore 2332 to rotationally couple the rotor shaft 2330 to other mechanisms.
- FIG. 24 is a perspective view of another example rotary piston 2400.
- the rotary piston 2400 can be the rotary piston 250, 260, 414, 712, 812, 822, 1530a, 1530b, 1730a, 1730b, 1930 or 2222.
- the example rotary piston 2400 includes a piston end 2410 and a connector section 2420.
- the connector section 2420 includes a bore 2430 formed to accommodate a connector pin, e.g., the connector pin 214.
- the piston end 2410 of example actuator 2400 includes an end taper 2440.
- the end taper 2440 is formed about the periphery of a terminal end 2450 of the piston end 2410.
- the end taper 2440 is formed at a radially inward angle starting at the outer periphery of the piston end 2410 and ending at the terminal end 2450.
- the end taper 2440 can be formed to ease the process of inserting the rotary piston 2400 into a pressure chamber, e.g., the pressure chamber 310.
- the piston end 2410 of example actuator 2400 is substantially smooth surface (e.g., a surface quality that can form a fluid barrier when in contact with a seal).
- the smooth surface of the piston end 2410 can provide a surface that can be contacted by a seal assembly.
- the seal assembly 320 can contact the smooth surface of the piston end 2410 to form part of a fluidic seal, reducing the need to form a smooth, fluidically sealable surface on the interior walls of the pressure chamber 310.
- the rotary piston 2400 is shown as having a generally solid circular cross-section, whereas the rotary pistons piston 250, 260, 414, 712, 812, 822, 1530a, 1530b, 1730a, 1730b, 1930 or 2222 have been illustrated as having various generally rectangular, elliptical, and other shapes, both solid and hollow, in cross section.
- the cross sectional dimensions of the rotary piston 2400 as generally indicated by the arrows 2491 and 2492, can be adapted to any appropriate shape, e.g., square, rectangular, ovoid, elliptical, circular, and other shapes, both solid and hollow, in cross section..
- the arc of the rotary piston 2400 can be adapted to any appropriate length.
- the radius of the rotary piston 2400 can be adapted to any appropriate radius.
- the piston end 2410 can be solid, hollow, or can include any appropriate hollow formation. In some embodiments, any of the previously mentioned forms of the piston end 2410 can also be used as the piston ends 1220a and/or 1220b of the dual rotary pistons 1216 of FIG. 12 .
- FIG. 25 is a flow diagram of an example process 2500 for performing rotary actuation.
- the process 2500 can be performed by the rotary piston-type actuators 100, 400, 700, 800, 1200, 1500, 1700, 1900, 2200, 2300, and/or 2600 which will be discussed in the descriptions of FIGs. 26-28 .
- a rotary actuator is provided.
- the rotary actuator of example actuator 2500 includes a first housing defining a first arcuate chamber including a first cavity, a first fluid port in fluid communication with the first cavity, an open end, and a first seal disposed about an interior surface of the open end, a rotor assembly rotatably journaled in the first housing and including a rotary output shaft and a first rotor arm extending radially outward from the rotary output shaft, an arcuate-shaped first piston disposed in the first housing for reciprocal movement in the first arcuate chamber through the open end.
- the first seal, the first cavity, and the first piston define a first pressure chamber, and a first connector, coupling a first end of the first piston to the first rotor arm.
- the actuator 100 includes the components of the pressure chamber assembly 300 and the rotary piston assembly 200 included in the actuation section 120.
- a pressurized fluid is applied to the first pressure chamber.
- pressurized fluid can be flowed through the fluid port 320 into the pressure chamber 310.
- the first piston is urged partially outward from the first pressure chamber to urge rotation of the rotary output shaft in a first direction.
- a volume of pressurized fluid flowed into the pressure chamber 310 will displace a similar volume of the rotary piston 260, causing the rotary piston 260 to be partly urged out of the pressure cavity 310, which in turn will cause the rotor shaft 210 to rotate clockwise.
- the rotary output shaft is rotated in a second direction opposite that of the first direction.
- the rotor shaft 210 can be rotated counter-clockwise by an external force, such as another mechanism, a torque-providing load, a return spring, or any other appropriate source of rotational torque.
- the first piston is urged partially into the first pressure chamber to urge pressurized fluid out the first fluid port.
- the rotary piston 260 can be pushed into the pressure chamber 310, and the volume of the piston end 252 extending into the pressure chamber 310 will displace a similar volume of fluid, causing it to flow out the fluid port 312.
- the example process 2500 can be used to provide substantially constant power over stroke to a connected mechanism. For example, as the actuator 100 rotates, there may be less than 10% position-dependent variation in the torque delivered to a connected load.
- the first housing further defines a second arcuate chamber comprising a second cavity, a second fluid port in fluid communication with the second cavity, and a second seal disposed about an interior surface of the open end
- the rotor assembly also includes a second rotor arm
- the rotary actuator also includes an arcuate-shaped second piston disposed in said housing for reciprocal movement in the second arcuate chamber, wherein the second seal, the second cavity, and the second piston define a second pressure chamber, and a second connector coupling a first end of the second piston to the second rotor arm.
- the actuator 100 includes the components of the pressure chamber assembly 300 and the rotary piston assembly 200 included in the actuation section 110.
- the second piston can be oriented in the same rotational direction as the first piston.
- the two pistons 260 are oriented to operate cooperatively in the same rotational direction.
- the second piston can be oriented in the opposite rotational direction as the first piston.
- the rotary pistons 250 are oriented to operate in the opposite rotational direction relative to the rotary pistons 260.
- the actuator can include a second housing and disposed about the first housing and having a second fluid port, wherein the first housing, the second housing, the seal, and the first piston define a second pressure chamber.
- the actuator 400 includes the outer housing 450 that surrounds the pressure chamber assembly 420. Pressurized fluid in the bore 452 is separated from fluid in the pressure chambers 422 by the seals 426.
- rotating the rotary output shaft in a second direction opposite that of the first direction can include applying pressurized fluid to the second pressure chamber, and urging the second piston partially outward from the second pressure chamber to urge rotation of the rotary output shaft in a second direction opposite from the first direction.
- pressurized fluid can be applied to the pressure chambers 310 of the first actuation section 110 to urge the rotary pistons 260 outward, causing the rotor shaft 210 to rotate counter-clockwise.
- rotating the rotary output shaft in a second direction opposite that of the first direction can include applying pressurized fluid to the second pressure chamber, and urging the first piston partially into the first pressure chamber to urge rotation of the rotary output shaft in a second direction opposite from the first direction.
- pressurized fluid can be flowed into the bore 452 at a pressure higher than that of fluid in the pressure chambers 422, causing the rotary pistons 414 to move into the pressure chambers 422 and cause the rotor shaft 412 to rotate counter-clockwise.
- rotation of the rotary output shaft can urge rotation of the housing.
- the rotary output shaft 412 can be held rotationally stationary and the housing 450 can be allowed to rotate, and application of pressurized fluid in the pressure chambers 422 can urge the rotary pistons 414 out of the pressure chambers 422, causing the housing 450 to rotate about the rotary output shaft 412.
- FIGs. 26-28 show various views of the components of another example rotary piston-type actuator 2600.
- the actuator 2600 is similar to the example actuator 100 of FIG. 1 , except for the configuration of the seal assemblies. Whereas the seal assembly 320 in the example actuator 100 remains substantially stationary (e.g., +/- 5 degrees) relative to the pressure chamber 310 and is in sliding contact with the surface of the rotary piston 250, in the example actuator 2600, the seal configuration is comparatively reversed as will be described below.
- the actuator 2600 includes a rotary piston assembly 2700 and a pressure chamber assembly 2602.
- the actuator 2600 includes a first actuation section 2610 and a second actuation section 2620.
- the first actuation section 2610 is configured to rotate the rotary piston assembly 2700 in a first direction, e.g., counter-clockwise
- the second actuation section 2620 is configured to rotate the rotary piston assembly 2700 in a second direction opposite the first direction, e.g., clockwise.
- the rotary piston assembly 2700 includes a rotor shaft 2710.
- a plurality of rotor arms 2712 extend radially from the rotor shaft 2710, the distal end of each rotor arm 2712 including a bore (not shown) substantially aligned (e.g., +/- 2 degrees) with the axis of the rotor shaft 2710 and sized to accommodate one of a collection of connector pins 2714.
- the first actuation section 2710 of example rotary piston assembly 2700 includes a pair of rotary pistons 2750, and the second actuation section 2720 includes a pair of rotary pistons 2760. While the example actuator 2600 includes two pairs of the rotary pistons 2750, 2760, other embodiments can include greater and/or lesser numbers of cooperative and opposing rotary pistons.
- each of the rotary pistons 2750, 2760 includes a piston end 2752 and one or more connector arms 2754.
- the piston end 252 is formed to have a generally semi-circular body having a substantially smooth surface (e.g., a surface quality that can form a fluid barrier when in contact with a seal).
- Each of the connector arms 2754 includes a bore 2756 substantially aligned (e.g., +/- 2 degrees) with the axis of the semi-circular body of the piston end 2752 and sized to accommodate one of the connector pins 2714.
- each of the rotary pistons 2750, 2760 includes a seal assembly 2780 disposed about the outer periphery of the piston ends 2752.
- the seal assembly 2780 can be a circular or semi-circular sealing geometry retained on all sides in a standard seal groove.
- commercially available reciprocating piston or cylinder type seals can be used.
- commercially available seal types that may already be in use for linear hydraulic actuators flying on current aircraft may demonstrate sufficient capability for linear load and position holding applications.
- the sealing complexity of the actuator 2600 may be reduced by using a standard, e.g., commercially available, semi-circular, unidirectional seal designs generally used in linear hydraulic actuators.
- the seal assembly 2780 can be a one-piece seal.
- FIG. 28 is a perspective cross-sectional view of the example rotary piston-type actuator 2600.
- the illustrated example shows the rotary pistons 2760 inserted into a corresponding pressure chamber 2810 formed as an arcuate cavity in the pressure chamber assembly 2602.
- the rotary pistons 2750 are also inserted into corresponding pressure chambers 2810, not visible in this view.
- each seal assembly 2780 contacts the outer periphery of the piston end 2760 and the substantially smooth interior surface of the pressure chamber 2810 to form a substantially pressure-sealed (e.g., less than 10% pressure drop per hour) region within the pressure chamber 2810.
- the seal 2780 can act as a bearing.
- the seal 2780 may provide support for the piston 2750, 2760 as it moves in and out of the pressure chamber 310.
- FIGs. 29A-29E are various views of another example rotary piston-type actuator 2900 with a central actuation assembly 2960.
- FIGs. 29A-29E are various views of another example rotary piston-type actuator 2900 with a central actuation assembly 2960.
- the example rotary piston-type actuator 2900 substantially similar to the example rotary piston-type actuator 1200 of FIGs.12-14 , where the example rotary piston-type actuator 2900 also includes a central actuation assembly 2960 and a central mounting assembly 2980.
- the example rotary piston-type actuator 2900 is illustrated and described as modification of the example rotary piston-type actuator 1200, in some embodiments the example rotary piston-type actuator 2900 can implement features of any of the example rotary piston-type actuators 100, 400, 700, 800, 1200, 1500, 1700, 1900, 2200, 2300, and/or 2600 in a design that also implements the central actuation assembly 2960 and/or the central mounting assembly 2980.
- the actuator 2900 includes a rotary piston assembly 2910, a first actuation section 2901 and a second actuation section 2902.
- the rotary piston assembly 2910 includes a rotor shaft 2912, a collection of rotor arms 2914, and the collection of dual rotary pistons, e.g., the dual rotary pistons 1216 of FIGs. 12-14 .
- the first actuation section 2901 of example actuator 2900 includes a first pressure chamber assembly 2950a
- the second actuation section 2902 includes a second pressure chamber assembly 2950b
- the first pressure chamber assembly 2950a includes a collection of pressure chambers, e.g., the pressure chambers 1252a of FIGs. 12-14 , formed as arcuate cavities in the first pressure chamber assembly 2950a
- the second pressure chamber assembly 2950b includes a collection of pressure chambers, e.g., the pressure chambers 1252b of FIGs. 12-14 , formed as arcuate cavities in the second pressure chamber assembly 2950b.
- a semicircular bore 2953 in the housing accommodates the rotor shaft 2912.
- the central mounting assembly 2980 is formed as a radially projected portion 2981 of a housing of the second pressure chamber assembly 2950b.
- the central mounting assembly 2980 provides a mounting point for removably affixing the example rotary piston-type actuator 2900 to an external surface, e.g., an aircraft frame.
- a collection of holes 2982 formed in the radially projected section 2981 accommodate the insertion of a collection of fasteners 2984, e.g., bolts, to removably affix the central mounting assembly 2980 to an external mounting feature 2990, e.g., a mounting point (bracket) on an aircraft frame.
- the central actuation assembly 2960 includes a radial recess 2961 formed in a portion of an external surface of a housing of the first and the second actuation sections 2901, 2902 at a midpoint along a longitudinal axis AA to the example rotary piston-type actuator 2900.
- An external mounting bracket 2970 that may be adapted for attachment to an external mounting feature on a member to be actuated, (e.g., aircraft flight control surfaces) is connected to an actuation arm 2962.
- the actuation arm 2962 extends through the recess 2961 and is removably attached to a central mount point 2964 formed in an external surface at a midpoint of the longitudinal axis of the rotor shaft 2912.
- the example rotary piston-type actuator 2900 is shown in cutaway end and perspective views taken though a midpoint of the central actuation assembly 2960 and the central mounting assembly 2980 at the recess 2961.
- the actuation arm 2962 extends into the recess 2961 to contact the central mount point 2964 of the rotor shaft 2912.
- the actuation arm 2962 is removably connected to the central mount point 2964 by a fastener 2966, e.g., bolt, that is passed through a pair of holes 2968 formed in the actuation arm 2962 and a hole 2965 formed through the central mount point 2964.
- a collection of holes 2969 are formed in a radially outward end of the actuation arm 2962.
- a collection of fasteners 2972 e.g., bolts, are passed through the holes 2969 and corresponding holes (not shown) formed in an external mounting feature (bracket) 2970.
- the central actuation assembly 2960 connects the example rotary piston actuator 2900 to the external mounting feature 2970 to transfer rotational motion of the rotor assembly 2910 to equipment to be moved (actuated), e.g., aircraft flight control surfaces.
- one of the central actuation assembly 2960 or the central mounting assembly 2980 can be used in combination with features of any of the example rotary piston-type actuators 100, 400, 700, 800, 1200, 1500, 1700, 1900, 2200, 2300, and/or 2600.
- the example rotary piston-type actuator 2900 may be mounted to a stationary surface through the central mounting assembly 2980, and provide actuation at one or both ends of the rotor shaft assembly 2910.
- the example rotary piston assembly 2900 may be mounted to a stationary surface through non-central mounting points, and provide actuation at the central actuation assembly 2960.
- FIGs. 30A-30E are various views of an example rotary actuator 3000 with a central actuation assembly 3060.
- FIGs. 30A-30E are various views of an example rotary actuator 3000 with a central actuation assembly 3060.
- the example rotary actuator 3000 is substantially similar to the rotary piston-type actuator 2900 of FIGs. 29A-29E , where the example rotary actuator 3000 also includes a central actuation assembly 3060 and a central mounting assembly 3080.
- the example rotary actuator 3000 can be a modification of the example rotary piston-type actuator 2900 in which rotational action can be performed by a mechanism other than a rotary piston-type actuator.
- the example rotary actuator 3000 can be include a rotary vane type actuator, a rotary fluid type actuator, an electromechanical actuator, a linear-to-rotary motion actuator, or combinations of these or any other appropriate rotary actuator.
- example rotary actuator 3000 is illustrated and described as modification of the example rotary piston-type actuator 2900, in some embodiments the example rotary actuator 3000 can implement features of any of the example rotary piston-type actuators 100, 400, 700, 800, 1200, 1500, 1700, 1900, 2200, 2300, 2600 and/or 2900 in a design that also implements the central actuation assembly 3060 and/or the central mounting assembly 3080.
- the actuator 3000 includes a rotary actuator section 3010a and a rotary actuator section 3010b.
- the rotary actuator sections 3010a and 3010b can be rotary vane type actuators, a rotary fluid type actuators, electromechanical actuators, a linear-to-rotary motion actuators, or combinations of these or any other appropriate rotary actuators.
- the rotary actuator section 3010a includes a housing 3050a
- the rotary actuator section 3010b includes a housing 3050b.
- a rotor shaft 3012a runs along the longitudinal axis of the rotary actuator section 3010a
- a rotor shaft 3012b runs along the longitudinal axis of the rotary actuator section 3010b.
- the central mounting assembly 3080 is formed as a radially projected portion 3081 of the housings 3050a and 3050b.
- the central mounting assembly 3080 provides a mounting point for removably affixing the example rotary actuator 3000 to an external surface or an external structural member, e.g., an aircraft frame, an aircraft control surface.
- a collection of holes 3082 formed in the radially projected section 3081 accommodate the insertion of a collection of fasteners (not shown), e.g., bolts, to removably affix the central mounting assembly 3080 to an external mounting feature, e.g., the external mounting feature 2090 of FIG. 29 , a mounting point (bracket) on an aircraft frame or control surface.
- the central actuation assembly 3060 includes a radial recess 3061 formed in a portion of an external surfaces of the housings 3050a, 3050b at a midpoint along a longitudinal axis AA to the example rotary actuator 3000.
- an external mounting bracket such as the external mounting bracket 2970, may be adapted for attachment to an external mounting feature of a structural member or a member to be actuated, (e.g., aircraft flight control surfaces) can be connected to an actuation arm 3062.
- An actuation arm such as the actuation arm 2962, can extend through the recess 3061 and can be removably attached to a central mount point 3064 formed in an external surface at a midpoint of the longitudinal axis of the rotor shafts 3012a and 3012b.
- the example rotary piston-type actuator 3000 is shown in end and cutaway perspective views taken though a midpoint of the central actuation assembly 3060 and the central mounting assembly 3080 at the recess 3061.
- the actuation arm (not shown) can extend into the recess 3061 to contact the central mount point 3064 of the rotor shafts 3012a, 3012b.
- the actuation arm can be removably connected to the central mount point 3064 by a fastener, e.g., bolt, that can be passed through a pair of holes (e.g. the holes 2968 formed in the actuation arm 2962) and a hole 3065 formed through the central mount point 3064.
- the central actuation assembly 3060 connects the example rotary actuator 3000 to an external mounting feature or structural member to impart rotational motion of the actuator sections 3010a, 3010b to equipment to be moved (actuated), e.g., aircraft flight control surfaces, relative to structural members, e.g., aircraft frames.
- one of the central actuation assembly 3060 or the central mounting assembly 3080 can be used in combination with features of any of the example rotary piston-type actuators 100, 400, 700, 800, 1200, 1500, 1700, 1900, 2200, 2300, 2600 and/or 2900.
- the example rotary actuator 3000 may be mounted to a stationary surface through the central mounting assembly 3080, and provide actuation at one or both ends of the rotor shafts 3012a, 3012b.
- the example rotary actuator 3000 may be mounted to a stationary surface through non-central mounting points, and provide actuation at the central actuation assembly 3060.
- the rotary actuator 3000 may be mounted to a stationary surface through the central mount point 3064, and provide actuation at the central mounting assembly 3080.
- FIGs. 31A-31E are various views of an example rotary actuator 3100 with a central actuation assembly 3160.
- FIGs. 31A-31E are various views of an example rotary actuator 3100 with a central actuation assembly 3160.
- the example rotary actuator 3100 is substantially similar to the rotary actuator 3000 of FIGs. 30A-30E , where the example rotary actuator 3100 also includes a central actuation assembly 3160 and a central mounting assembly 3180.
- the example rotary actuator 3100 can be a modification of the example rotary piston-type actuator 3000 in which rotational action can be performed by a mechanism other than a rotary fluid actuator.
- the example rotary actuator 3100 is an electromechanical actuator.
- example rotary actuator 3100 is illustrated and described as modification of the example rotary actuator 3000, in some embodiments the example rotary actuator 3100 can implement features of any of the example rotary piston-type actuators 100, 400, 700, 800, 1200, 1500, 1700, 1900, 2200, 2300, 2600 and/or 2900 and/or the rotary actuator 3000 in a design that also implements the central actuation assembly 3160 and/or the central mounting assembly 3180.
- the actuator 3100 includes a rotary actuator section 3110a and a rotary actuator section 3110b.
- the rotary actuator sections 3110a and 3110b can be electromechanical actuators.
- the rotary actuator section 3110a includes a housing 3150a
- the rotary actuator section 3110b includes a housing 3150b.
- a rotor shaft 3112a runs along the longitudinal axis of the rotary actuator section 3110a
- a rotor shaft 3112b runs along the longitudinal axis of the rotary actuator section 3110b.
- the central mounting assembly 3180 is formed as a radially projected portion 3181 of the housings 3150a and 3150b.
- the central mounting assembly 3180 provides a mounting point for removably affixing the example rotary actuator 3100 to an external surface or an external structural member, e.g., an aircraft frame, an aircraft control surface.
- a collection of holes 3182 formed in the radially projected section 3181 accommodate the insertion of a collection of fasteners (not shown), e.g., bolts, to removably affix the central mounting assembly 3180 to an external mounting feature, e.g., the external mounting feature 2090 of FIG. 29 , a mounting point (bracket) on an aircraft frame or control surface.
- the central actuation assembly 3160 includes a radial recess 3161 formed in a portion of an external surfaces of the housings 3150a, 3150b at a midpoint along a longitudinal axis AA to the example rotary actuator 3100.
- an external mounting bracket such as the external mounting bracket 2970, may be adapted for attachment to an external mounting feature of a structural member or a member to be actuated, (e.g., aircraft flight control surfaces) can be connected to an actuation arm 3162.
- An actuation arm such as the actuation arm 2962, can extend through the recess 3161 and can be removably attached to a central mount point 3164 formed in an external surface at a midpoint of the longitudinal axis of the rotor shafts 3112a and 3112b.
- the example rotary piston-type actuator 3100 is shown in end and cutaway perspective views taken though a midpoint of the central actuation assembly 3160 and the central mounting assembly 3080 at the recess 3161.
- the actuation arm (not shown) can extend into the recess 3161 to contact the central mount point 3164 of the rotor shafts 3112a, 3112b.
- the actuation arm can be removably connected to the central mount point 3164 by a fastener, e.g., bolt, that can be passed through a pair of holes (e.g. the holes 2968 formed in the actuation arm 2962) and a hole 3165 formed through the central mount point 3164.
- the central actuation assembly 3160 connects the example rotary actuator 3100 to an external mounting feature or structural member to impart rotational motion of the actuator sections 3110a, 3110b to equipment to be moved (actuated), e.g., aircraft flight control surfaces, relative to structural members, e.g., aircraft frames.
- one of the central actuation assembly 3160 or the central mounting assembly 3180 can be used in combination with features of any of the example rotary piston-type actuators 100, 400, 700, 800, 1200, 1500, 1700, 1900, 2200, 2300, 2600 and/or 2900 and/or the rotary actuator 3000.
- the example rotary actuator 3100 may be mounted to a stationary surface through the central mounting assembly 3180, and provide actuation at one or both ends of the rotor shafts 3112a, 3112b.
- the example rotary actuator 3100 may be mounted to a stationary surface through non-central mounting points, and provide actuation at the central actuation assembly 3160.
- the rotary actuator 3100 may be mounted to a stationary surface through the central mount point 3164, and provide actuation at the central mounting assembly 3180.
- FIG. 32 is an exploded perspective view of another example pressure chamber assembly 3200.
- features of the pressure chamber assembly 3200 can be used with any of the actuators 400, 800, 1200, 1500, 1750, 1900, 2200, 2300, and 2600.
- the pressure chamber assembly 3200 includes a housing 3210, a modular piston housing 3250a, and a modular piston housing 3250b.
- the housing 3210 includes a central longitudinal cavity 3212.
- the central longitudinal cavity 3212 is formed to accommodate a rotor shaft (not shown) such as the rotor shaft 210 of the rotary piston assembly 200 of FIG. 2 .
- the modular piston housing 3250a of example pressure chamber assembly 3200 is an arcuate-shaped assembly that includes a collection of pressure chambers 3252a formed as arcuate cavities in the modular piston housing 3250a.
- the modular piston housing 3250b is also an arcuate-shaped assembly that includes a collection of pressure chambers 3252b formed as arcuate cavities in the modular piston housing 3250b.
- the modular piston housing 3250b mirrors the arcuate shape of the modular piston housing 3250a.
- the pressure chambers 3252a, 3252b are formed to accommodate rotary pistons (not shown) such as rotary pistons 250.
- the modular piston housings 3250a, 3250b is formed as unitary piston housings.
- the modular piston housings 3250a, 3250b may each be machined, extruded, or otherwise formed without forming seams within the pressure chambers 3251a, 3252b.
- the modular piston housings 3250a, 3250b are removably affixed to the housing 3210.
- the pressure chamber assembly 3200 can include radial apertures into which the modular piston housings 3250a, 3250b can be inserted.
- the pressure chamber assembly 3200 can include longitudinal apertures into which the modular piston housings 3250a, 3250b can be inserted.
- the modular piston housings 3250a, 3250b of example pressure chamber assembly 3200 include a collection of bores 3254.
- the bores 3254 align with a collection of bores 3256 formed in the housing 3210, a collection of fasteners (not shown), e.g., bolts or screws, are passed through the bores 3256 and into the bores 3254 to removably affix the modular piston housings 3250a, 3250b to the housing 3210.
- modular piston housings 3250a, 3250b can include a seal assembly about the interior surface of the pressure chambers 3252a, 3252b.
- the seal assembly can be a circular or semi-circular sealing geometry retained on all sides in a standard seal groove.
- commercially available reciprocating piston or cylinder type seals can be used.
- commercially available seal types that may already be in use for linear hydraulic actuators flying on current aircraft may demonstrate sufficient capability for linear load and position holding applications.
- the sealing complexity of the example pressure chamber assembly 3200 may be reduced by using a standard, e.g., commercially available, semi-circular, unidirectional seal design generally used in linear hydraulic actuators.
- the seal assemblies can be a one-piece seal. In some embodiments of the modular piston housings 3250a, 3250b, the seal assemblies may be included as part of the rotary pistons. In some embodiments, the modular piston housings 3250a, 3250b may include a wear member between the pistons and the pressure chambers 3252a, 3252b.
- Each of the pressure chambers 3252a, 3252b of example pressure chamber assembly 3200 may include a fluid port (not shown) formed through the modular piston housings 3250a, 3250b, through which pressurized fluid may flow.
- pressurized fluid e.g., hydraulic oil, water, air, gas
- the pressure differential between the interior of the pressure chambers 3252a, 3252b and the ambient conditions outside the pressure chambers 3252a, 3252b can cause ends of the pistons to be urged outward from the pressure chambers 3252a, 3252b.
- the pistons urge a rotary piston assembly, such as the rotary piston assembly 200, to rotate.
- the modular piston housings 3250a, 3250b may include the central longitudinal cavity 3212 and other features of the housing 3210.
- the modular piston housings 3250a, 3250b may be removably affixed to each other.
- the modular piston housings 3250a, 3250b may be bolted, screwed, clamped, welded, pinned, or otherwise directly or indirectly retained relative to each other such that the assembled combination provides the features of the housing 3210, eliminating the need for the housing 3210.
- FIGs. 33A-33C are exploded and assembled perspective views of another example rotary piston assembly 3300.
- features of the rotary piston assembly 3300 can be used with any of the rotary piston assemblies 200, 700, 1100, 1501, 1701, and 2700, and/or with any of the actuators 400, 800, 1200, 1500, 1750, 1900, 2200, 2300, 2600, 2900, and 3000.
- the rotary piston assembly 3300 includes a rotor shaft 3310.
- a plurality of rotor arms 3312 extend radially from the rotor shaft 3310, the distal end of each rotor arm 3312 including a bore (not shown) substantially aligned (e.g., +/- 2 degrees) with the axis of the rotor shaft 3310 and sized to accommodate one of a collection of connector pins 3314.
- the example rotary piston assembly 3300 includes a pair of rotary pistons 3350. While the example rotary piston assembly 3300 includes two of the rotary pistons 3350, other embodiments can include greater and/or lesser numbers of cooperative and opposing rotary pistons.
- Each of the rotary pistons 3350 includes a piston end 3352 and one or more connector arms 3354.
- the piston end 3352 is formed to have a generally semi-circular body having a substantially smooth surface (e.g., a surface quality that can form a fluid barrier when in contact with a seal).
- Each of the connector arms 3354 includes a bore 3356 substantially aligned (e.g., +/- 2 degrees) with the axis of the semi-circular body of the piston end 3352 and sized to accommodate one of the connector pins 3314.
- Each of the rotary pistons 3350 of the example rotary piston assembly 3300 may be assembled to the rotor shaft 3310 by aligning the connector arms 3354 with the rotor arms 3312 such that the bores (not shown) of the rotor arms 3312 align with the bores 3365.
- the connector pins 3314 may then be inserted through the aligned bores to create connections between the pistons 3350 and the rotor shaft 3310. As shown, each connector pin 3314 is slightly longer than the aligned bores.
- each connector pin 3314 that extends beyond the aligned bores is a circumferential recess (not shown) that can accommodate a retaining fastener (not shown), e.g., a snap ring or spiral ring.
- a retaining fastener e.g., a snap ring or spiral ring.
- the connector arms 3312 include retainer elements 3380, and the rotor arms 3312 include retainer elements 3382.
- the retainer elements 3380, 3382 are intermeshed relative to the rotary motion of the pistons 3350 and the rotor shaft 3310.
- the retainer elements 3380, 3382 can be formed with radial geometries that prevent rotation of the rotary pistons 3350 away from the radius of curvature of the rotary pistons 3350.
- contact among the retainer elements 3380, 3382 permits rotary movement to be transmitted between the rotor shaft 3310 and the rotary pistons 3350. Movement of the pistons 3350 urges motion of the rotor arms 3312 and the rotor shaft 3310 through contact among the retainer elements 3380, 3382. Likewise, movement of the rotor shaft 3310 and the rotor arms 3312 urges motion of the pistons 3350 through contact among the retainer elements 3380, 3382.
- the retainer elements 3380, 3382 can be connected by one or more fasteners that prevent rotation of the rotary pistons 3350 away from the radius of curvature of the rotary pistons 3350.
- the retainer elements 3380, 3382 can be connected by bolts, screws, clamps, welds, adhesives, or any other appropriate form of connector or fastener.
- the connector pin 3314 may be longitudinally constrained by a piston housing (not shown).
- the connector pin 3314 may break at some point along its length, but the housing may be formed such that the ends of the connector pin 3314 may not have sufficient room to permit a broken section of the connector pin 3314 to move far enough longitudinally to become disengaged from the bores 3356.
- the retainer elements 3380, 3382 and/or the housing can provide a fail-safe construction that can prevent broken pieces of the connector pin 3314 from becoming dislodged from their normal locations, which can present a risk of if such broken pieces were to become jammed within components of a rotary actuator in which the rotary piston assembly 3300 may be used.
- the connector pin 3314 and the bores 3356 and the bores (not shown) of the rotor arms 3312 can be formed with cross-sectional geometries that prevent rotation of the connector pin 3314 within the bores 3356 and the bores (not shown) of the rotor arms 3312 around the longitudinal axis of the connector pin 3314.
- the connector pin 3314 can be a "locking pin” formed with a square, rectangular, triangular, hex, star, oval, or any other appropriate non-circular cross-section, and the bores 3356 and the bores (not shown) of the rotor arms 3312 are formed with corresponding cross-sections, such that the connector pin 3314 can be inserted when the bores are aligned and the pistons 3350 are substantially prevented from rotating (e.g., less than 5 degrees of rotation) about the axis of the connector pin 3314 when the connector pin 3314 is inserted within the bores.
- the retainer elements 3380, 3382 and/or the "locking pin” embodiment of the connector pin 3314 can affect the performance of the rotary piston assembly 3300.
- embodiments of the rotary piston assembly 3300 implementing the retainer elements 3380, 3382 and/or the "locking pin” embodiment of the connector pin 3314 can reduce or prevent relative movement between the pistons 3350 and the rotor arms 3312 as the rotary piston assembly 3300 moves within a rotary piston actuator, which can provide substantially constant torque (e.g., less than 10% variance) over a relatively full range of motion of the assembly 3300.
- FIGs. 34A and 34B are perspective views of another example rotary piston 3400.
- the rotary piston 3400 can be the rotary piston 3350 of FIGs. 33A-33C .
- features of the rotary piston 3400 can be used with any of the rotary piston assemblies 200, 700, 1100, 1501, 1701, and 2700, and/or with any of the actuators 400, 800, 1200, 1500, 1750, 1900, 2200, 2300, 2600, 2900, 3000, 3200 and 3300.
- the rotary piston 3400 includes a piston end 3432 and one or more connector arms 3434.
- the piston end 3432 is formed to have a generally elliptical body having a substantially smooth surface (e.g., a surface quality that can form a fluid barrier when in contact with a seal).
- Each of the connector arms 3434 includes a bore 3436a and a bore 3436b substantially aligned (e.g., +/- 2 degrees) with the axis of the elliptical body of the piston end 3432 and sized to accommodate a connector pin such as one of the connector pins 3314.
- Other embodiments may include more than two bores in a rotary piston.
- the piston end 3432 is formed to have a generally rectangular body, or a body having any other appropriate cross-section.
- the "multiple pin" embodiment of the rotary piston 3400 can affect the performance of a rotary piston assembly.
- embodiments of rotary piston assemblies implementing the rotary piston 3400, two locking pins, and a correspondingly formed rotor arm can reduce or prevent relative movement between the piston 3400 and the rotor arms as the rotary piston assembly moves within a rotary piston actuator, which can provide substantially constant torque (e.g., less than 10% variance) over a relatively full range of motion of the assembly.
- one or more of the bores 3436a, 3436b can be formed with cross-sectional geometries that prevent rotation of a connector pin, such as the connector pin 3314, within the bores 3436a, 3436b around the longitudinal axis of the connector pin.
- one or more of the bores 3436a, 3436b can be formed with square, rectangular, triangular, hex, star, oval, or any other appropriate non-circular cross-sections, such that correspondingly configured connector pins can be inserted to substantially prevent the rotary piston 3400 from rotating about the axes of the bores 3436a, 3436b when the connector pins are inserted within the bores 3436a, 3436b (e.g., prevent rotation of greater than 5 degrees).
- FIG. 35A is a perspective view of another example pressure chamber assembly 3500.
- FIG. 35B is a perspective partial cutaway view of the example pressure chamber assembly 3500.
- FIG. 35C is a perspective exploded view of the example pressure chamber assembly 3500.
- features of the pressure chamber assembly 3500 can be used with any of the rotary piston assemblies 200, 700, 1100, 1501, 1701, and 2700, the rotary piston 3400, and/or with any of the actuators 400, 800, 1200, 1500, 1750, 1900, 2200, 2300, 2600, 2900, 3000, 3200 and 3300.
- the pressure chamber assembly 3500 includes a piston housing 3550, a modular housing 3510a, and a modular housing 3510b.
- the modular housing 3510a includes an arcuate central recess 3512a
- the modular housing 3510b includes an arcuate central recess 3512b.
- the arcuate central recesses 3512a and 3512b accommodate the piston housing 3550.
- the piston housing 3550 is formed to accommodate a rotary piston 3514 in a cavity 3558.
- the piston housing 3550 includes a collar 3552.
- the collar 3552 is formed to hold a seal 3554 in sealing contact with the rotary piston 3514.
- the rotary piston can be any of the rotary pistons 260, 414, 712, 812, 822, 1216, 1520a, 1520b, 1720, 1930, 2222, 2400, 2754, 3350, and 3400.
- the pressure chamber 3550 is formed as a unitary piston housing.
- pressure chamber 3550 may be machined, extruded, hydro formed, or otherwise formed without forming seams within the pressure chambers 3550.
- the example rotary piston 3514 includes a bore 3556.
- the bore 3356 can be formed with a cross-sectional geometry that prevents rotation of a connector pin, such as the connector pin 3314 of FIGs. 33A-33C , within the bore 3556 and the bores (not shown) of a rotor arm, such as the rotor arms 3312 around the longitudinal axis of the connector pin.
- the bore 3356 can be formed to accommodate a "locking pin” formed with a square, rectangular, triangular, hex, star, oval, or any other appropriate non-circular cross-section, such that the connector pin can be inserted through the bore 3556 and are substantially prevented from rotating about the axis of the bore 3556 when the connector pin is inserted within the bore 3556 (e.g., prevent rotation greater than 5 degrees).
- a "locking pin” formed with a square, rectangular, triangular, hex, star, oval, or any other appropriate non-circular cross-section, such that the connector pin can be inserted through the bore 3556 and are substantially prevented from rotating about the axis of the bore 3556 when the connector pin is inserted within the bore 3556 (e.g., prevent rotation greater than 5 degrees).
- the rotary piston 3514 can include retainer elements.
- the rotary piston 3514 can include the retainer elements 3380 (for example, as shown in FIGS 33A-C ) that can intermesh with the retainer elements 3382 to prevent rotation of the rotary piston 3550 away from the radius of curvature of the rotary pistons 3550.
- FIG. 36 is a perspective view of an example piston housing assembly 3600.
- the assembly 3600 includes a piston housing 3650a and a piston housing 3650b.
- the piston housings 3650a-3650b each includes a cavity 3658.
- the piston housings 3650a-3650b can be used in place or in addition to the piston housing 3550 of the example pressure chamber assembly 3500 of FIGs. 35A-35C .
- the piston housings 3650a-3650b can be enclosed by modular housings such as the modular housings 3510a and 3510b.
- the assembly 3600 includes a collection of fluid ports 3652a and 3652b.
- the fluid ports 3652a-3652b are in fluid communication with the cavities 3658 and or fluid supply lines (not shown).
- the fluid ports 3652 can flow fluid among the piston housings 3650a-3650b.
- fluid may be applied to pressurize the piston housings 3650a, and the fluid will flow through the fluid port 3652a to pressurize the piston housings 3650b as well.
- any appropriate number of piston housings, such as the piston housings 3650a-3650b, and fluid ports, such as the fluid ports 3652 can be assembled in an alternating daisy-chain arrangement to form the assembly 3600.
- FIG. 37 is a schematic of an example rotary piston-type actuator system 3700.
- the system 3700 includes the rotary piston-type actuator 400 of FIG. 4 .
- the actuator 400 may be replaced in the system 3700 by any of the rotary piston assemblies 200, 700, 1100, 1501, 1701, 2700, and 3500, the rotary piston 3400, and/or with any of the actuators 800, 1200, 1500, 1750, 1900, 2200, 2300, 2600, 2900, 3000, 3200 and 3300.
- the system 3700 also includes a controller 3702, and a fluid pressure assembly 3703.
- the fluid pressure assembly 3703 includes a servo valve 3704, a fluid pressure source 3706, and a drain 3709.
- the fluid pressure source 3706 can be a central fluid pressure source 3706 fluidly connected to the servo valve 3704 by a high pressure fluid line 3707.
- the drain 3709 can be a central drain or fluid return reservoir fluidly connected to the servo valve 3704 by a low pressure fluid line 3708.
- the fluid pressure source 3706 can be a fluid pressure pump that provides fluid pressure for multiple fluid-operated devices, such as the actuator 400.
- the fluid pressure source 3706 can be a central hydraulic or pneumatic pressure system of an aircraft.
- the system 3700 can be used to actuate a flight control surface or other apparatus in an aircraft.
- the controller 3702 is fluidly connected to the servo valve 3704 by a fluid line 3710 and a fluid line 3712.
- the controller 3702 is configured to selectively apply fluid pressure to the fluid lines 3710 and 3712 to actuate the servo valve 3704.
- the servo valve 3704 is fluidly connected to the fluid chambers 422 and the bore 452 by a fluid line 3720, a fluid line 3722, and a fluid line 3724.
- the servo valve 3704 is configured to selectively and reversibly connect the fluid pressure source 3706 and the drain 3708 to the fluid chambers 422 and the bore 452.
- the system 3700 includes a rotary position sensor assembly 3730.
- the rotary position sensor assembly 3730 is mechanically coupled to the actuator 400 to provide a signal representative of the position, speed, direction of rotation, and/or acceleration of the rotor shaft 412.
- the position sensor assembly 3730 is a position limit sensor configured to detect when the rotor shaft 412 has moved to a predetermined position.
- the signal is provided to the controller 3702 over a conductor 3732, such as a wire or an optical fiber.
- the controller 3702 can use the signal from the position sensor assembly 3730 to form a feedback loop for controlling the position of the rotor shaft 412.
- FIG. 38 is a flow diagram of an example process 3800 for using the example rotary piston-type actuator system 3700 of FIG. 37 .
- a rotary actuator is provided.
- the rotary actuator includes a first housing defining a first arcuate chamber having a first cavity, a first fluid port in fluid communication with the first cavity, and an open end, a rotor assembly rotatably journaled in said first housing and having a rotary output shaft and a first rotor arm extending radially outward from the rotary output shaft, and an arcuate-shaped first piston disposed in said first housing for reciprocal movement in the first arcuate chamber through the open end.
- a first seal, the first cavity, and the first piston define a first pressure chamber, and a first portion of the first piston contacts the first rotor arm.
- the actuator also includes a first fluid line coupled to the first fluid port, a high pressure fluid line, and a low pressure fluid line.
- the rotary piston-type actuator 400 can be provided.
- a central pressure source is provided.
- the central pressure source is coupled to the high pressure fluid line.
- the fluid pressure source 3706 is fluidly connected to the servo valve 3704 by the high pressure fluid line 3707
- the drain 3709 is fluidly connected to the servo valve 3704 by the low pressure fluid line 3708.
- a servo valve is provided.
- the servo valve is positioned between the central pressure source and the hydraulic actuator.
- the servo valve 3704 is positioned along a fluid path connecting the pressure source 3706 and the actuator 400.
- the servo valve is controlled to selectively connect the first fluid line to the high pressure fluid line and the low pressure fluid line.
- the servo valve 3704 can be controlled by the controller 3702 to selectively connect the fluid lines 3707 and 3708 to the fluid lines 3720, 3722, and/or 3724.
- pressurized fluid is applied to the first pressure chamber.
- the servo valve 3704 can be controlled by the controller 3702 to adjustably and reversibly apply fluid pressure from the pressure source 3706 to the fluid chamber 422.
- the servo valve 3704 can be controlled to adjustably and reversibly apply fluid pressure from the pressure source 3706 to the bore 452.
- the first piston is urged partially outward from the first pressure chamber to urge rotation of the rotary output shaft in a first direction.
- fluid pressure in the fluid chambers 422 urges the pistons 414 partially outward from the fluid chambers 422.
- the outward motion of the pistons 414 urges rotation of the rotor shaft 412.
- the housing can include a second arcuate chamber having a second cavity, and a second fluid port in fluid communication with the second cavity, wherein the rotor assembly further comprises a second rotor arm.
- the rotary actuator can also include an arcuate-shaped second piston positioned in the housing for reciprocal movement in the second arcuate chamber.
- a second seal, the second cavity, and the second piston can define a second pressure chamber, and a first portion of the second piston can contact the second rotor arm.
- a second fluid line can be coupled to the second fluid port, and the servo valve can be controllable to selectively connect the second fluid line to the high pressure fluid line and the low pressure fluid line to control movement of the hydraulic actuator.
- the process 3800 can also include controlling the servo valve to selectively connect the second fluid line to the high pressure fluid line and the low pressure fluid line to apply pressurized fluid to the second pressure chamber, and urging the second piston partially outward from the second pressure chamber.
- a controller can be coupled to control the servo valve, and controlling the servo valve can include controlling, by the controller, the servo valve to selectively connect the first fluid line to the high pressure fluid line and the low pressure fluid line to apply pressurized fluid to the first pressure chamber.
- the controller 3702 can control the servo valve 3704 to connect the pressure source 3706 and the drain 3709 to the fluid chambers 422 and/or the bore 452.
- a position sensor (e.g., the position sensor assembly 3730) can be provided and configured to provide a position feedback signal indicative of a position of the rotary actuator.
- a position feedback signal from the position sensor can be provided to the controller to control the servo valve, and the controller can control the servo valve to selectively connect the first fluid line to the high pressure fluid line and the low pressure fluid line to apply pressurized fluid to the first pressure chamber based on the position feedback signal.
- the position sensor can be coupled to the rotary output shaft, and the position feedback signal can be a rotary position feedback signal.
- the position sensor can be a position limit sensor, and the position feedback signal can be a position limit signal.
- the process 3800 can include urging rotation of the rotary output shaft to control at least one of the group consisting of rotary output shaft speed, rotary output shaft position, rotary output shaft torque, and rotary output shaft acceleration.
- the process 3800 can be used with an actuator having a central actuation assembly, such as the assembly 2900 of FIGs. 29A-29E or the assembly 3000 of FIGs. 30A-30E .
- FIG. 39 is a schematic of another example rotary piston-type actuator system.
- the system 3700 includes the rotary piston-type actuator 400 of FIG. 4 .
- the actuator 400 may be replaced in the system 3900 by any of the rotary piston assemblies 200, 700, 1100, 1501, 1701, 2700, and 3500, the rotary piston 3400, and/or with any of the actuators 800, 1200, 1500, 1750, 1900, 2200, 2300, 2600, 2900, 3000, 3200 and 3300.
- the system 3900 also includes a controller 3902 and a fluid pressure source 3906.
- the fluid pressure source 3906 includes a fluid pump 3910 driven by a motor 3912, which is controlled by the controller 3902.
- the pump 3910 drives fluid unidirectionally or bidirectionally to and/or from the fluid chambers 422 and the bore 452 through the fluid lines 3720-3724 to cause actuation of the rotor shaft 412.
- a collection of check valves 3914, relief valves 3916, and a fluid reservoir 3918 are also interconnected between the fluid lines 3720-3724 to maintain and protect the integrity of the fluid circuit formed within the fluid pressure source 3906.
- the fluid pressure source 3906 can be a local fluid pressure source fluidly connected to the assembly 400.
- the fluid pressure source 3906 can be a fluid pressure pump that provides fluid pressure for a single fluid-operated device, such as the actuator 400.
- the fluid pressure source 3906 can be a local (e.g., point of use) hydraulic or pneumatic pressure system of an aircraft.
- the system 3900 can be used to actuate a flight control surface or other apparatus in an aircraft.
- the system 3900 includes the rotary position sensor assembly 3730. Signals from the position sensor assembly 3730 are provided to the controller 3902 over a conductor 3732 such as a wire or an optical fiber. In some embodiments, the controller 3902 can use the signal from the position sensor assembly 3730 to form a feedback loop for controlling the position of the rotor shaft 412.
- FIG. 40 is a flow diagram of an example process 4000 for using the example rotary piston-type actuator system 3900 of FIG. 39 .
- a rotary actuator is provided.
- the rotary actuator includes a first housing defining a first arcuate chamber having a first cavity, a first fluid port in fluid communication with the first cavity, and an open end, a rotor assembly rotatably journaled in said first housing and having a rotary output shaft and a first rotor arm extending radially outward from the rotary output shaft, and an arcuate-shaped first piston disposed in said first housing for reciprocal movement in the first arcuate chamber through the open end.
- a first seal, the first cavity, and the first piston define a first pressure chamber, and a first portion of the first piston contacts the first rotor arm.
- the actuator also includes a first fluid line coupled to the first fluid port, a high pressure fluid line, and a low pressure fluid line.
- the rotary piston-type actuator 400 can be provided.
- a fluid reservoir is provided.
- a fluid pump coupled to the fluid reservoir is provided.
- the fluid reservoir 3918 and the fluid pump 3910 are provided.
- the fluid pump is controlled, and at 4010 high pressure is selectively provided to the first fluid line to apply pressurized fluid to the first pressure chamber.
- the controller 3902 can activate the motor 3912 and drive the fluid pump 3910 to provide high pressure to one or more of the fluid lines 3720-3724, which in turn provide the pressurized fluid or one or more of the fluid chambers 422 and/or the bore 452.
- the first piston is urged partially outward from the first pressure chamber to urge rotation of the rotary output shaft in a first direction.
- fluid pressure in the fluid chambers 422 urges the pistons 414 partially outward from the fluid chambers 422.
- the outward motion of the pistons 414 urges rotation of the rotor shaft 412.
- the housing can include a second arcuate chamber having a second cavity, and a second fluid port in fluid communication with the second cavity, wherein the rotor assembly further comprises a second rotor arm.
- the rotary actuator can also include an arcuate-shaped second piston positioned in the housing for reciprocal movement in the second arcuate chamber.
- a second seal, the second cavity, and the second piston can define a second pressure chamber, and a first portion of the second piston can contact the second rotor arm.
- the assembly 400 includes two of the pistons 414 and two of the fluid chambers 422.
- a second fluid line can be coupled to the second fluid port.
- the process 3900 can also include controlling the fluid pump to selectively provide high pressure to the second fluid line to apply pressurized fluid to the second pressure chamber, and urging the second piston partially outward from the second pressure chamber.
- high pressure fluid can be applied to a second one of the fluid chambers 422 to urge a second one of the pistons 414 to move outward.
- the fluid pump can provide high pressure to the bore 452 to urge the pistons 414 into the fluid chambers 422.
- a controller can be coupled to control the fluid pump, and controlling the fluid pump can include controlling, by the controller, the fluid pump to selectively apply pressurized fluid to the first pressure chamber.
- controlling the fluid pump can include controlling, by the controller, the fluid pump to selectively apply pressurized fluid to the first pressure chamber.
- the controller 3902 can control the motor 3912 to selectively pressurize the fluid chambers 422 and/or the bore 452.
- a position sensor (e.g., the position sensor assembly 3730) can be provided and configured to provide a position feedback signal indicative of a position of the rotary actuator.
- a position feedback signal from the position sensor can be provided to the controller to control the servo valve, and the controller can control the servo valve to selectively connect the first fluid line to the high pressure fluid line and the low pressure fluid line to apply pressurized fluid to the first pressure chamber based on the position feedback signal.
- the position sensor can be coupled to the rotary output shaft, and the position feedback signal can be a rotary position feedback signal.
- the position sensor can be a position limit sensor, and the position feedback signal can be a position limit signal.
- the process 3900 can include urging rotation of the rotary output shaft to control at least one of the group consisting of rotary output shaft speed, rotary output shaft position, rotary output shaft torque, and rotary output shaft acceleration.
- the process 3900 can be used with an actuator having a central actuation assembly, such as the assembly 2900 of FIGs. 29A-29E or the assembly 3000 of FIGs. 30A-30E , which may be the central actuation assembly of an aircraft.
- a central actuation assembly such as the assembly 2900 of FIGs. 29A-29E or the assembly 3000 of FIGs. 30A-30E , which may be the central actuation assembly of an aircraft.
- FIG. 41 is a schematic of another example rotary piston-type actuator system 4100.
- the system 4100 includes the rotary piston-type actuator 400 of FIG. 4 .
- the actuator 400 may be replaced in the system 4100 by any of the rotary piston assemblies 200, 700, 1100, 1501, 1701, 2700, and 3500, the rotary piston 3400, and/or with any of the actuators 800, 1200, 1500, 1750, 1900, 2200, 2300, 2600, 2900, 3000, 3200 and 3300.
- the system 4100 also includes a controller 4102, the fluid pressure assembly 3703, the fluid pressure source 3906, and a mode select valve 4104.
- the fluid pressure assembly 3703 and the fluid pressure source 3906 are each controllably connected to the controller 4102.
- the mode select valve 4104 is controllably linked to the controller 4102, and the controller 4102 is configured to actuate the mode select valve 4104 to selectably and fluidly connect the fluid pressure assembly 3703 and the fluid pressure source 3906 to the fluid lines 3720-3724.
- the controller 4102 controls the mode select valve 4104 and the selected one of the fluid pressure assembly 3703 and the fluid pressure source 3906 to actuate the actuator 400.
- the system 4100 can be used to provide redundant control of an actuator.
- the actuator 400 can be operated using fluid pressure provided by the fluid pressure assembly 3703 (e.g., a central hydraulic pressure system in an aircraft), but in the event of a malfunction in the fluid pressure assembly 3703 the controller 4102 can actuate the mode select valve 4104 to cause the actuator 400 to be operated using fluid pressure provided by the fluid pressure source 3906 (e.g., a local hydraulic pressure system located near the actuator 400 in an aircraft).
- the fluid pressure assembly 3703 e.g., a central hydraulic pressure system in an aircraft
- the controller 4102 can actuate the mode select valve 4104 to cause the actuator 400 to be operated using fluid pressure provided by the fluid pressure source 3906 (e.g., a local hydraulic pressure system located near the actuator 400 in an aircraft).
- the system 4100 includes the rotary position sensor assembly 3730. Signals from the position sensor assembly 3730 are provided to the controller 3902 over the conductor 3732 such as a wire or an optical fiber. In some embodiments, the controller 4102 can use the signal from the position sensor assembly 3730 to form a feedback loop for controlling the position of the rotor shaft 412. In some embodiments, the system 4100 can be used to actuate a flight control surface or other apparatus in an aircraft.
- FIG. 42 is a flow diagram of an example process 4200 for using the example rotary piston-type actuator system 4100 of FIG. 41 .
- a rotary actuator is provided.
- the rotary actuator includes a first housing defining a first arcuate chamber having a first cavity, a first fluid port in fluid communication with the first cavity, and an open end, a rotor assembly rotatably journaled in said first housing and having a rotary output shaft and a first rotor arm extending radially outward from the rotary output shaft, and an arcuate-shaped first piston disposed in said first housing for reciprocal movement in the first arcuate chamber through the open end.
- a first seal, the first cavity, and the first piston define a first pressure chamber, and a first portion of the first piston contacts the first rotor arm.
- the actuator also includes a first fluid line coupled to the first fluid port, a high pressure fluid line, and a low pressure fluid line.
- the rotary piston-type actuator 400 can be provided.
- a central pressure source is provided.
- the central pressure source is coupled to the high pressure fluid line.
- the fluid pressure source 3706 is fluidly connected to the servo valve 3704 by the high pressure fluid line 3707
- the drain 3709 is fluidly connected to the servo valve 3704 by the low pressure fluid line 3708.
- a servo valve is provided.
- the servo valve is positioned between the central pressure source and the hydraulic actuator.
- the servo valve 3704 is positioned along a fluid path connecting the pressure source 3706 to the mode select valve 4104 and the actuator 400.
- a fluid reservoir is provided.
- a fluid pump coupled to the fluid reservoir is provided.
- the fluid reservoir 3918 and the fluid pump 3910 are provided.
- a valve block is provided.
- the mode select valve 4104 is provided in the system 4100.
- the fluid pump, the servo valve, and the valve block are controlled, and at 4216 high pressure is selectively provided to the first fluid line to apply pressurized fluid to the first pressure chamber.
- the controller 4102 can activate the motor 3912, the servo valve 3704, and the mode select valve 4104 to connect and provide high pressure to one or more of the fluid lines 3720-3724, which in turn provide the pressurized fluid or one or more of the fluid chambers 422 and/or the bore 452.
- the first piston is urged partially outward from the first pressure chamber to urge rotation of the rotary output shaft in a first direction.
- fluid pressure in the fluid chambers 422 urges the pistons 414 partially outward from the fluid chambers 422.
- the outward motion of the pistons 414 urges rotation of the rotor shaft 412.
- the housing can include a second arcuate chamber having a second cavity, and a second fluid port in fluid communication with the second cavity, wherein the rotor assembly further comprises a second rotor arm.
- the rotary actuator can also include an arcuate-shaped second piston positioned in the housing for reciprocal movement in the second arcuate chamber.
- a second seal, the second cavity, and the second piston can define a second pressure chamber, and a first portion of the second piston can contact the second rotor arm.
- the assembly 400 includes two of the pistons 414 and two of the fluid chambers 422.
- a second fluid line can be coupled to the second fluid port.
- the process 4200 can also include controlling the fluid pump to selectively provide high pressure to the second fluid line to apply pressurized fluid to the second pressure chamber, and urging the second piston partially outward from the second pressure chamber.
- high pressure fluid can be applied to a second one of the fluid chambers 422 to urge a second one of the pistons 414 to move outward.
- the fluid pump can provide high pressure to the bore 452 to urge the pistons 414 into the fluid chambers 422.
- a controller can be coupled to control the fluid pump.
- controlling the servo valve can include controlling, by the controller, the servo valve to selectively connect the first fluid line to the high pressure fluid line and the low pressure fluid line to apply pressurized fluid to the first pressure chamber.
- controlling the fluid pump can include controlling, by the controller, the fluid pump to selectively apply pressurized fluid to the first pressure chamber.
- controlling the valve block can include controlling, by the controller, the valve block to selectively connect the servo valve and the fluid pump to the first pressure chamber.
- the controller 4102 can control the motor 3912, the servo valve 3704, and the mode select valve 4104 to selectively pressurize the fluid chambers 422 and/or the bore 452.
- a position sensor (e.g., the position sensor assembly 3730) can be provided and configured to provide a position feedback signal indicative of a position of the rotary actuator.
- a position feedback signal from the position sensor can be provided to the controller to control the servo valve, and the controller can control the servo valve to selectively connect the first fluid line to the high pressure fluid line and the low pressure fluid line to apply pressurized fluid to the first pressure chamber based on the position feedback signal.
- the position sensor can be coupled to the rotary output shaft, and the position feedback signal can be a rotary position feedback signal.
- the position sensor can be a position limit sensor, and the position feedback signal can be a position limit signal.
- the process 4200 can include urging rotation of the rotary output shaft to control at least one of the group consisting of rotary output shaft speed, rotary output shaft position, rotary output shaft torque, and rotary output shaft acceleration.
- the process 4200 can be used with an actuator having a central actuation assembly, such as the assembly 2900 of FIGs. 29A-29E or the assembly 3000 of FIGs. 30A-30E .
- FIG. 43 is a schematic of another example rotary piston-type actuator system 4300.
- the system 4300 includes the rotary piston-type actuator 2900 of FIGs. 29A-29E .
- the actuator 2900 may be replaced in the system 4300 by any appropriate one or combination of the rotary piston assemblies 200, 700, 1100, 1501, 1701, 2700, and 3500, the rotary piston 3400, and/or with any of the actuators 800, 1200, 1500, 1750, 1900, 2200, 2300, 2600, 2900, 3000, 3200 and 3300.
- the system 4300 also includes a controller 4302, the fluid pressure assembly 3703, and the fluid pressure source 3906.
- the fluid pressure assembly 3703 and the fluid pressure source 3906 are each controllably connected to the controller 4302.
- the fluid pressure assembly 3703 is fluidly connected by a fluid line 4310 and a fluid line 4312 to one or more fluid chambers, e.g., the pressure chambers 1252a of FIGs. 12-14 , formed as arcuate cavities in the first pressure chamber assembly 2950a.
- the fluid pressure source 3906 is fluidly connected by a fluid line 4314 and a fluid line 4316 to one or more fluid chambers, e.g., the pressure chambers 1252a of FIGs. 12-14 , formed as arcuate cavities in the second pressure chamber assembly 2950b.
- the system 4300 can be used to provide redundant control of an actuator.
- the actuator 2900 can be operated using fluid pressure provided by the fluid pressure assembly 3703 (e.g., a central hydraulic pressure system in an aircraft) and the fluid pressure source 3906 (e.g., a local hydraulic pressure system in an aircraft).
- the fluid pressure assembly 3703 and the pressure source 3906 can be operated substantially simultaneously by the controller 4302.
- the fluid pressure assembly 3703 and the pressure source 3906 can be operated alternatingly by the controller 4302.
- the actuator 2900 can be operated under fluid pressure provided by the pressure source 3703, and when a malfunction is detected in the pressure source 3703, the controller 4302 can control the pressure source 3906 to control the actuator 2900 in a redundant backup configuration.
- the system 4300 can be used to actuate a flight control surface or other apparatus in an aircraft.
- the system 4300 includes the rotary position sensor assembly 3730. Signals from the position sensor assembly 3730 are provided to the controller 4302 over a conductor 4332 such as a wire or an optical fiber. In some embodiments, the controller 4302 can use the signal from the position sensor assembly 3730 to form a feedback loop for controlling the position of the rotor shaft 412.
- FIG. 44 is a flow diagram of an example process 4400 for using the example rotary piston-type actuator system of FIG. 43 .
- a rotary actuator is provided.
- the rotary actuator includes a first housing defining a first arcuate chamber having a first cavity, a first fluid port in fluid communication with the first cavity, and an open end, a rotor assembly rotatably journaled in said first housing and having a rotary output shaft and a first rotor arm extending radially outward from the rotary output shaft, and an arcuate-shaped first piston disposed in said first housing for reciprocal movement in the first arcuate chamber through the open end.
- a first seal, the first cavity, and the first piston define a first pressure chamber, and a first portion of the first piston contacts the first rotor arm.
- the actuator also includes a first fluid line coupled to the first fluid port, a high pressure fluid line, and a low pressure fluid line.
- the rotary piston-type actuator 2900 can be provided.
- a central pressure source is provided.
- the central pressure source is coupled to the high pressure fluid line.
- the fluid pressure source 3706 is fluidly connected to the servo valve 3704 by the high pressure fluid line 3707
- the drain 3709 is fluidly connected to the servo valve 3704 by the low pressure fluid line 3708.
- a servo valve is provided.
- the servo valve is positioned between the central pressure source and the hydraulic actuator.
- the servo valve 3704 is positioned along a fluid path connecting the pressure source 3706 to the mode select valve 4104 and the actuator 2900.
- a fluid reservoir is provided.
- a fluid pump coupled to the fluid reservoir is provided.
- the fluid reservoir 3918 and the fluid pump 3910 are provided.
- the servo valve is controlled, and at 4414 pressurized fluid is applied to the first fluid line to provide pressurized fluid to the first pressure chamber.
- the controller 4402 can control the servo valve 3704 to provide high pressure fluid to one or more of the fluid lines 4310-4312, which in turn provide the pressurized fluid or one or more of the fluid chambers in the first pressure chamber assembly 2950a.
- the first piston is urged partially outward from the first pressure chamber to urge rotation of the rotary output shaft in a first direction.
- fluid pressure in the fluid chambers in the first pressure chamber assembly 2950a urges pistons, e.g., the dual rotary pistons 1216 of FIGs. 12-14 , partially outward from the fluid chambers.
- the outward motion of the pistons urges rotation of the rotor shaft 2912.
- the fluid pump is controlled, and at 4420 pressurized fluid is applied to the second fluid line to provide pressurized fluid to the second pressure chamber.
- the controller 4402 can control the fluid pump 3910 to provide high pressure fluid to one or more of the fluid lines 4314-4316, which in turn provide the pressurized fluid or one or more of the fluid chambers in the second pressure chamber assembly 2950b.
- the second piston is urged partially outward from the second pressure chamber to urge rotation of the rotary output shaft in a first direction.
- fluid pressure in the fluid chambers in the second pressure chamber assembly 2950b urges pistons, e.g., the dual rotary pistons 1216 of FIGs. 12-14 , partially outward from the fluid chambers.
- the outward motion of the pistons urges rotation of the rotor shaft 2912.
- the second piston is urged partially outward from the second pressure chamber to urge rotation of the rotary output shaft in a second direction.
- a central actuation assembly can be provided, including a central mounting point formed in an external surface of the rotary output shaft, where the central mounting point is proximal to the longitudinal midpoint of the rotary output shaft.
- an actuation arm can be removably attached at a proximal end to the central mounting point, the actuation arm adapted at a distal end for attachment to an external mounting feature of a member to be actuated.
- the process 4400 can include urging rotation of the actuation arm, and urging motion of the member to be actuated.
- the rotary piston-type actuator 2900 includes the central actuation assembly 2960 and the central mounting assembly 2980.
- the housing can include a second arcuate chamber having a second cavity, and a second fluid port in fluid communication with the second cavity, wherein the rotor assembly further comprises a second rotor arm.
- the rotary actuator can also include an arcuate-shaped second piston positioned in the housing for reciprocal movement in the second arcuate chamber.
- a second seal, the second cavity, and the second piston can define a second pressure chamber, and a first portion of the second piston can contact the second rotor arm.
- the assembly 2900 can include one or more of the dual rotary pistons 1216 of FIGs. 12-14 , and two fluid chambers, e.g., the pressure chambers 1252a of FIGs.
- a second fluid line can be coupled to the second fluid port.
- the process 4400 can also include controlling the fluid pump to selectively provide high pressure to the second fluid line to apply pressurized fluid to the second pressure chamber, and urging the second piston partially outward from the second pressure chamber.
- high pressure fluid can be applied to a second one of the fluid chambers in the first pressure chamber assembly 2950a to urge a second one of the pistons to move outward.
- the fluid pump may not be connected to a central hydraulic system.
- the fluid pump 3910 is connected to the fluid reservoir 3918 and not the fluid pressure source 3706.
- a first controller can be coupled to control the servo valve, and a second controller can be coupled to control the fluid pump.
- the first controller and the second controller can be a single controller.
- the controller 4202 is configured to control both the servo valve 3704 and the fluid pump 3910.
- controlling the servo valve can include controlling, by the controller, the servo valve to selectively connect the first fluid line to the high pressure fluid line and the low pressure fluid line to apply pressurized fluid to the first pressure chamber.
- controlling the fluid pump can include controlling, by the controller, the fluid pump to selectively apply pressurized fluid to the second pressure chamber.
- the controller 4402 can control the motor 3912 and the servo valve 3704 to selectively pressurize the fluid chambers in the first pressure chamber assembly 2950a and the second pressure chamber assembly 2950b.
- a position sensor (e.g., the position sensor assembly 3730) can be provided and configured to provide a position feedback signal indicative of a position of the rotary actuator.
- a position feedback signal from the position sensor can be provided to the first controller to control the servo valve and to the second controller to control the fluid pump, and the controllers can control the servo valve and the fluid pump based on the position feedback signal.
- the position sensor can be coupled to the rotary output shaft, and the position feedback signal can be a rotary position feedback signal.
- the first controller, the servo, and the position sensor can be configured as a first feedback loop
- the second controller, the fluid pump, and the position sensor can be configured as a second feedback loop.
- the position sensor can be a position limit sensor
- the position feedback signal can be a position limit signal
- the process 4400 can include urging rotation of the rotary output shaft to control at least one of the group consisting of rotary output shaft speed, rotary output shaft position, rotary output shaft torque, and rotary output shaft acceleration.
- the first seal can be disposed about an interior surface of the open end.
- the first seal can be the seal 1560 of FIG. 16 , which is disposed about the interior surface at the open end 1565.
- the first seal can be disposed about the periphery of the first piston.
- the first housing can be formed as a one-piece housing.
- the pressure chambers 1252a of FIGs. 12-14 are formed as one-piece chambers.
- the first seal can be a one-piece seal.
- first rotor arm can be coupled to a flight control surface of an aircraft.
- the first rotor arm can be coupled to a primary flight control surface of an aircraft.
- the central pressure source can be a central hydraulic system of an aircraft.
- FIG. 45 is a schematic of another example rotary piston-type actuator system 4500.
- the system 4500 includes the rotary piston-type actuator 2900 of FIGs. 29A-29E .
- the actuator 2900 may be replaced in the system 4500 by any appropriate one or combination of the rotary piston assemblies 200, 700, 1100, 1501, 1701, 2700, and 3500, the rotary piston 3400, and/or with any of the actuators 800, 1200, 1500, 1750, 1900, 2200, 2300, 2600, 2900, 3000, 3200 and 3300.
- the system 4500 also includes a controller 4502, the fluid pressure assembly 3703, and a fluid pressure source 4503.
- the fluid pressure assembly 3703 is fluidly connected by the fluid lines 4310-4312 to one or more fluid chambers, e.g., the pressure chambers 1252a of FIGs. 12-14 , formed as arcuate cavities in the first pressure chamber assembly 2950a.
- the fluid pressure source 4503 includes a fluid pump 4510 driven by the motor 3912, which is controlled by the controller 4502.
- the fluid pump 4510 drives pressurized fluid unidirectionally to a servo valve 4504, and the controller 4502 controls the servo valve 4504 to selectably provide the pressurized fluid to the fluid chambers of the second pressure chamber assembly 2950b through the fluid lines 4314-4316 to cause actuation of the rotor shaft 2912.
- the system 4500 can be used to provide redundant control of an actuator.
- the actuator 2900 can be operated using fluid pressure provided by the fluid pressure assembly 3703 (e.g., a central hydraulic pressure system in an aircraft) and the fluid pressure source 4503 (e.g., a local hydraulic pressure system in an aircraft).
- the fluid pressure assembly 3703 and the pressure source 4503 can be operated substantially simultaneously by the controller 4502.
- the fluid pressure assembly 3703 and the pressure source 3503 can be operated alternatingly by the controller 4502.
- the actuator 2900 can be operated under fluid pressure provided by the pressure source 3703, and when a malfunction is detected in the pressure source 3703, the controller 4502 can control the pressure source 4503 to control the actuator 2900 in a redundant backup configuration.
- the system 4500 can be used to actuate a flight control surface or other apparatus in an aircraft.
- the system 4500 includes the rotary position sensor assembly 3730. Signals from the position sensor assembly 3730 are provided to the controller 4502 over the conductor 4332. In some embodiments, the controller 4502 can use the signal from the position sensor assembly 3730 to form a feedback loop for controlling the position of the rotor shaft 2912.
- FIG. 46 is a schematic of another example rotary piston-type actuator system 4600.
- the system 4600 includes the rotary piston-type actuator 2900 of FIGs. 29A-29E .
- the actuator 2900 may be replaced in the system 4500 by any appropriate one or combination of the rotary piston assemblies 200, 700, 1100, 1501, 1701, 2700, and 3500, the rotary piston 3400, and/or with any of the actuators 800, 1200, 1500, 1750, 1900, 2200, 2300, 2600, 2900, 3000, 3200 and 3300.
- the system 4600 also includes a controller 4602 and two of the fluid pressure sources 3703.
- One of the fluid pressure sources 3703 is fluidly connected by the fluid lines 4310-4312 to one or more fluid chambers, e.g., the pressure chambers 1252a of FIGs. 12-14 , formed as arcuate cavities in the first pressure chamber assembly 2950a.
- the other of the fluid pressure sources 3703 is fluidly connected by the fluid lines 4314-4316 to one or more fluid chambers, e.g., the pressure chambers 1252a of FIGs. 12-14 , formed as arcuate cavities in the first pressure chamber assembly 2950b.
- the system 4600 can be used to provide redundant control of an actuator.
- the actuator 2900 can be operated using fluid pressure provided by both of the fluid pressure sources 3703.
- the fluid pressure sources 3703 can be operated substantially simultaneously by the controller 4602.
- the fluid pressure sources 3703 can be operated alternatingly by the controller 4602.
- the actuator 2900 can be operated under fluid pressure provided by a first one of the pressure sources 3703, and when a malfunction is detected in the first pressure source 3703, the controller 4602 can control the a second one of the pressure sources 3703 to control the actuator 2900 in a redundant backup configuration.
- any appropriate combination of two or more fluid pressure sources can be used to control the actuator 2900.
- two of the fluid pressure sources 4503 of FIG. 45 can be used, or two of the fluid pressure sources 3906 can be used, or any appropriate combination of the pressure sources 3703, 3906, and 4503 can be used simultaneously or alternatingly in a redundant backup configuration for the system 4600.
- the system 4600 can be used to actuate a flight control surface or other apparatus in an aircraft.
- the system 4600 includes the rotary position sensor assembly 3730. Signals from the position sensor assembly 3730 are provided to the controller 4602 over the conductor 4332. In some embodiments, the controller 4602 can use the signal from the position sensor assembly 3730 to form a feedback loop for controlling the position of the rotor shaft 2912.
- FIG. 47 is a schematic of another example rotary piston-type actuator system 4700.
- the system 4700 includes the rotary piston-type actuator 400 of FIGs. 29A-29E .
- the actuator 400 may be replaced in the system 4700 by any of the rotary piston assemblies 200, 700, 1100, 1501, 1701, 2700, and 3500, the rotary piston 3400, and/or with any of the actuators 800, 1200, 1500, 1750, 1900, 2200, 2300, 2600, 2900, 3000, 3200 and 3300.
- the system 4700 also includes a controller 4702, the fluid pressure source 3706, the drain 3704, the motor 3912, the fluid pump 4510, the reservoir 3918, the mode select valve 4104, and the servo valve 3704.
- the mode select valve 4104 is controllable by the controller 4702 to selectably provide fluid pressure from the fluid pressure source 3706 and the fluid pump 4510 to the servo valve 3704.
- the servo valve 3704 is fluidly connected to the fluid chambers 422 and the bore 452 by the fluid line 3720, the fluid line 3722, and the fluid line 3724.
- the controller 4702 is fluidly connected to the servo valve 3704 by a fluid line 4710 and a fluid line 4712.
- the controller 4702 is configured to selectively apply fluid pressure to the fluid lines 3710 and 3712 to actuate the servo valve 3704.
- the servo valve 3704 is configured to selectively and reversibly connect the fluid pressure provided through the mode select valve 4104 to the fluid chambers 422 and the bore 452.
- the system 4700 includes the rotary position sensor assembly 3730.
- the rotary position sensor assembly 3730 is mechanically coupled to the actuator 400 to provide a signal representative of the position, speed, and/or acceleration of the rotor shaft 412.
- the position sensor assembly 3730 is a position limit sensor configured to detect when the rotor shaft 412 has moved to a predetermined position.
- the signal is provided to the controller 4702 over the conductor 3732.
- the controller 4702 can use the signal from the position sensor assembly 3730 to form a feedback loop for controlling the position of the rotor shaft 412.
- the system 4700 can be used to provide redundant control of an actuator.
- the actuator 400 can be operated using fluid pressure provided by both of the fluid pressure source 3706 and the fluid pump 4510.
- the actuator 400 can be operated under fluid pressure provided by the fluid pressure source 3706, and when a malfunction is detected in the pressure source 3706, the controller 4702 can control the mode select valve 4104 to select the fluid pump 4510 to provide fluid pressure to actuate the actuator 400 in a redundant backup configuration.
- the system 4700 can be used to actuate a flight control surface or other apparatus in an aircraft.
- any appropriate combination of two or more fluid pressure sources can be used to control the actuator 400.
- two of the fluid pressure sources 4503 of FIG. 45 can be used, or two of the fluid pressure sources 3906 can be used, or any appropriate combination of the pressure sources 3703, 3906, and 4503 can be used simultaneously or alternatingly in a redundant backup configuration for the system 4600.
- FIG. 48 is a schematic of another example rotary piston-type actuator system 4800.
- the system 4800 includes the rotary piston-type actuator 400 of FIGs. 29A-29E .
- the actuator 400 may be replaced in the system 4800 by any of the rotary piston assemblies 200, 700, 1100, 1501, 1701, 2700, and 3500, the rotary piston 3400, and/or with any of the actuators 800, 1200, 1500, 1750, 1900, 2200, 2300, 2600, 2900, 3000, 3200 and 3300.
- the system 4800 also includes a controller 4802, the fluid pressure assembly 3703, the fluid pressure source 4503, and the mode select valve 4104.
- the mode select valve 3704 is fluidly connected to the fluid chambers 422 and the bore 452 by the fluid line 3720, the fluid line 3722, and the fluid line 3724.
- the mode select valve 4104 is controllable by the controller 4802 to selectably provide fluid pressure from the fluid pressure assembly 3703 and the fluid pressure source 4503 to the fluid chamber 422 and the bore 452.
- the controller 4702 is configured to selectively control the fluid pressure sources 3703, 3906 and the mode select valve 4104 to selectively and reversibly connect the fluid pressure provided through the mode select valve 4104 to the fluid chambers 422 and the bore 452 to actuate the actuator 400
- the system 4800 includes the rotary position sensor assembly 3730.
- the rotary position sensor assembly 3730 is mechanically coupled to the actuator 400 to provide a signal representative of the position, speed, and/or acceleration of the rotor shaft 412.
- the position sensor assembly 3730 is a position limit sensor configured to detect when the rotor shaft 412 has moved to a predetermined position.
- the signal is provided to the controller 4802 over the conductor 3732.
- the controller 4802 can use the signal from the position sensor assembly 3730 to form a feedback loop for controlling the position of the rotor shaft 412.
- the system 4800 can be used to provide redundant control of an actuator.
- the actuator 400 can be operated using fluid pressure provided by both of the fluid pressure assembly 3703 and the fluid pressure source 3906.
- the actuator 400 can be operated under fluid pressure provided by the fluid pressure assembly 3703, and when a malfunction is detected in the pressure source 3703, the controller 4802 can control the mode select valve 4104 to select the fluid pump 3910 to provide fluid pressure to actuate the actuator 400 in a redundant backup configuration.
- the system 4800 can be used to actuate a flight control surface or other apparatus in an aircraft.
- any appropriate combination of two or more fluid pressure sources can be used to control the actuator 400.
- two of the fluid pressure sources 4503 of FIG. 45 can be used, or two of the fluid pressure sources 3906 can be used, or any appropriate combination of the pressure sources 3703, 3906, and 4503 can be used simultaneously or alternatingly in a redundant backup configuration for the system 4800.
Landscapes
- Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- Fluid Mechanics (AREA)
- Mechanical Engineering (AREA)
- General Engineering & Computer Science (AREA)
- Actuator (AREA)
Claims (14)
- Système d'actionneur rotatif (3700) comprenant :un premier logement définissant une première chambre arquée comprenant une première cavité, un premier port de fluide en communication hydraulique avec la première cavité, une rainure et une extrémité ouverte, dans lequel le premier logement définissant la première chambre arquée est formé et une seule pièce d'un matériau ;un ensemble rotor tourillonné en rotation dans ledit premier logement et comprenant un arbre de sortie rotatif aligné sur un axe d'un premier bras de rotor (212, 1214, 1530, 1730, 1914, 2224, 2712, 2914, 3312) s'étendant radialement vers l'extérieur depuis l'arbre de sortie rotatif ;un premier piston en forme d'arc (250, 260, 414, 712, 812, 822, 1530, 1730, 1930, 2222, 2400) disposé dans ledit premier logement pour un déplacement en va-et-vient dans la première chambre arquée autour de l'axe et à travers l'extrémité ouverte, dans lequel un premier joint d'étanchéité (320) inclus dans le premier piston, la première cavité et le premier piston définissent une première chambre de pression, et une première partie du premier piston est en contact avec le premier bras de rotor,dans lequel la rainure est formée le long de l'axe et dimensionnée pour traverser une broche de raccordement afin de raccorder le premier piston au premier bras de rotor ;une première conduite de fluide couplée au premier port de fluide ; etun élément choisi parmi a) ou b), dans lequel :a) comprendune conduite de fluide haute pression (3707),une conduite de fluide basse pression (3708),une source de pression centrale (3706) couplée à la conduite de fluide haute pression, etune soupape asservie (3704) positionnée entre la source de pression centrale et l'actionneur rotatif et pouvant être commandée pour raccorder de façon sélective la première conduite de fluide à la conduite de fluide haute pression et à la conduite de fluide basse pression pour commander le mouvement de l'actionneur rotatif ; etb) comprendun réservoir de fluide (3918), etune pompe à fluide (3910) couplée au réservoir de fluide, la pompe à fluide pouvant être commandée pour fournir de façon sélective une pression élevée à la première conduite de fluide pour commander le mouvement de l'actionneur rotatif, dans lequel la pompe à fluide n'est pas raccordée à un système hydraulique central.
- Système d'actionneur rotatif selon la revendication 1, comprenant en outre un contrôleur (3702, 3902) couplé pour commander la soupape asservie de a) ou la pompe à fluide de b).
- Système d'actionneur rotatif selon la revendication 2, comprenant en outre un capteur de position (3730) configuré pour produire un signal de rétroaction de position, dans lequel le contrôleur est en outre configuré pour recevoir un signal de rétroaction de position depuis le capteur de position et commander la soupape asservie de a) ou la pompe à fluide de b) sur la base du signal de rétroaction de position.
- Système d'actionneur rotatif selon la revendication 3, dans lequel le capteur de position (3730) est couplé à l'arbre de sortie rotatif (2912, 412), dans lequel le contrôleur (3702, 3902), la soupape asservie ou la pompe à fluide, et le capteur de position comprennent une boucle de rétroaction.
- Système d'actionneur rotatif selon la revendication 3 ou la revendication 4, dans lequel le capteur de position est un capteur de limite de position, et le contrôleur est en outre configuré pour recevoir un signal de limite de position depuis le capteur de position et commander la soupape asservie ou la pompe à fluide sur la base du signal de limite de position.
- Système d'actionneur rotatif selon l'une quelconque des revendications 1 à 5, dans lequel :le système d'actionneur rotatif comprend b) ; etle premier logement définit en outre une seconde chambre arquée comprenant une seconde cavité, et un second port de fluide est en communication hydraulique avec la seconde cavité ;dans lequel l'ensemble rotor comprend en outre un second bras de rotor ;dans lequel l'actionneur rotatif comprend en outre un second piston en forme d'arc disposé dans ledit premier logement pour un déplacement en va-et-vient dans la seconde chambre arquée, dans lequel un second joint d'étanchéité, la seconde cavité et le second piston définissent une seconde chambre de pression, et une première partie du second piston est en contact avec le second bras de rotor ; etdans lequel l'actionneur rotatif comprend en outre une seconde conduite de fluide couplée au second port de fluide ; etla pompe à fluide peut en outre être commandée pour fournir de façon sélective une pression élevée à la seconde conduite de fluide pour commander le mouvement de seulement l'actionneur rotatif.
- Système d'actionneur rotatif selon l'une quelconque des revendications 1 à 5, le système d'actionneur rotatif comprenant :à la fois a) et b) ; etun bloc de distribution positionné entre l'actionneur rotatif, la soupape asservie et la pompe à fluide, le bloc de distribution pouvant être commandé pour fournir de façon sélective une pression élevée à la première conduite de fluide depuis la pompe à fluide et la soupape asservie.
- Système d'actionneur rotatif selon l'une quelconque des revendications 1 à 7, dans lequel le premier bras de rotor est couplé à une gouverne d'un aéronef.
- Système d'actionneur rotatif selon la revendication 8, dans lequel le premier bras de rotor est couplé à une gouverne principale d'un aéronef.
- Procédé d'actionnement rotatif comprenant :
la fourniture d'un actionneur rotatif comprenant :un premier logement définissant une première chambre arquée comprenant une première cavité, un premier port de fluide en communication hydraulique avec la première cavité, une rainure et une première extrémité ouverte, dans lequel le premier logement définissant la première chambre arquée est formé d'une seule pièce d'un matériau ;un ensemble rotor tourillonné en rotation dans ledit premier logement et comprenant un arbre de sortie rotatif aligné sur un axe et un premier bras de rotor (212, 1214, 1530, 1730, 1914, 2224, 2712, 2914, 3312) s'étendant radialement vers l'extérieur depuis l'arbre de sortie rotatif ;un premier piston en forme d'arc (250, 260, 414, 712, 812, 822, 1530, 1730, 1930, 2222, 2400) disposé dans ledit premier logement pour un déplacement en va-et-vient dans la première chambre arquée autour de l'axe et à travers la première extrémité ouverte, dans lequel un premier joint d'étanchéité (320) inclus dans le premier piston, la première cavité et le premier piston définissent une première chambre de pression, et une première partie du premier piston est en contact avec le premier bras de rotor,dans lequel la rainure est formée le long de l'axe et dimensionnée pour traverser une broche de raccordement pour raccorder le premier piston au premier bras de rotor ;une première conduite de fluide couplée au premier port de fluide ; etun élément choisi parmi a) ou b), dans lequel :a) comprendla fourniture d'une conduite de fluide haute pression (3707) ;la fourniture d'une conduite de fluide basse pression (3708) ;la fourniture d'une source de pression centrale (3706) couplée à la conduite de fluide haute pression ; etla fourniture d'une soupape asservie (3704) positionnée entre la source de pression centrale et l'actionneur rotatif ; etla commande de la soupape asservie pour raccorder de façon sélective la première conduite de fluide à la conduite de fluide haute pression et à la conduite de fluide basse pression pour appliquer un fluide sous pression à la première chambre de pression ; etb) comprendla fourniture d'un réservoir de fluide (3918) ;la fourniture d'une pompe à fluide (3910) couplée au réservoir de fluide ; etla commande de la pompe à fluide pour fournir de façon sélective une pression élevée à la première conduite de fluide pour appliquer un fluide sous pression à la première chambre de pression ; etla poussée du premier piston en partie vers l'extérieur depuis la première chambre de pression pour pousser la rotation de l'arbre de sortie rotatif dans une première direction. - Procédé selon la revendication 10, comprenant en outre la fourniture d'un contrôleur couplé pour commander la soupape asservie de a) pour raccorder de façon sélective la première conduite de fluide à la conduite de fluide haute pression et à la conduite de fluide basse pression ou pour commander la pompe à fluide de b), la commande appliquant dans les deux cas un fluide sous pression à la première chambre de pression.
- Procédé selon la revendication 11, comprenant en outre :la fourniture d'un capteur de position configuré pour produire un signal de rétroaction de position indiquant une position de l'actionneur rotatif ;la réception, par le contrôleur, d'un signal de rétroaction de position depuis le capteur de position pour commander la soupape asservie de a) ou la pompe à fluide de b) sur la base du signal de rétroaction de position.
- Procédé selon l'une quelconque des revendications 10 à 12, dans lequel l'actionneur rotatif comprend :à la fois a) et b) ; etun bloc de distribution positionné entre l'actionneur rotatif, la soupape asservie et la pompe à fluide ; et le procédé comprenant en outre la commande du bloc de distribution pour fournir de façon sélective une pression élevée à la première conduite de fluide depuis la pompe à fluide et la soupape asservie, le procédé comprenant en outre la commande de la pompe à fluide, du bloc de distribution et de la soupape asservie pour fournir de façon sélective une pression élevée à la première conduite de fluide afin d'appliquer un fluide sous pression à la première chambre de pression.
- Procédé selon l'une quelconque des revendications 10 à 12, dans lequel :l'actionneur rotatif comprend b) ; etle premier logement définit en outre une seconde chambre arquée comprenant une seconde cavité et un second port de fluide en communication hydraulique avec la seconde cavité, l'ensemble rotor comprenant en outre un second bras de rotor s'étendant radialement vers l'extérieur depuis l'arbre de sortie rotatif ; etle système d'actionneur rotatif comprend en outre :un second piston en forme d'arc disposé dans ledit premier logement pour un déplacement en va-et-vient dans la seconde chambre arquée à travers la seconde extrémité ouverte, dans lequel un second joint d'étanchéité, la seconde cavité et le second piston définissent une seconde chambre de pression, et une seconde partie du second piston est en contact avec le second bras de rotor ;une seconde ligne de fluide couplée au second port de fluide ;dans lequel la commande de la pompe à fluide comprend la commande de la pompe à fluide pour fournir de façon sélective une pression élevée à la seconde conduite de fluide pour appliquer un fluide sous pression à la seconde chambre de pression ; etle second piston est poussé partiellement vers l'extérieur depuis la seconde chambre de pression.
Applications Claiming Priority (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US13/921,904 US9816537B2 (en) | 2013-02-27 | 2013-06-19 | Rotary piston type actuator with a central actuation assembly |
| US14/170,461 US9476434B2 (en) | 2013-02-27 | 2014-01-31 | Rotary piston type actuator with modular housing |
| US14/170,434 US8955425B2 (en) | 2013-02-27 | 2014-01-31 | Rotary piston type actuator with pin retention features |
| US14/258,434 US9593696B2 (en) | 2013-02-27 | 2014-04-22 | Rotary piston type actuator with hydraulic supply |
| PCT/US2014/042257 WO2014204799A1 (fr) | 2013-06-19 | 2014-06-13 | Actionneur du type à pistons rotatifs à alimentation hydraulique |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| EP3011190A1 EP3011190A1 (fr) | 2016-04-27 |
| EP3011190B1 true EP3011190B1 (fr) | 2020-03-11 |
Family
ID=51134428
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP14736232.1A Active EP3011190B1 (fr) | 2013-06-19 | 2014-06-13 | Actionneur du type à pistons rotatifs à alimentation hydraulique |
Country Status (6)
| Country | Link |
|---|---|
| EP (1) | EP3011190B1 (fr) |
| JP (1) | JP2016527449A (fr) |
| CN (1) | CN105723102B (fr) |
| BR (1) | BR112015031898A8 (fr) |
| CA (1) | CA2915968A1 (fr) |
| WO (1) | WO2014204799A1 (fr) |
Families Citing this family (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| AR100120A1 (es) * | 2014-04-04 | 2016-09-14 | Fisher Controls Int Llc | Sistema y método para controlar una válvula |
| NO342007B1 (no) * | 2015-06-12 | 2018-03-12 | West Drilling Products As | Momentdemper for demping av et rotasjonsmoment og en apparatur som omfatter en momentdemper |
| CN105952707B (zh) * | 2016-06-30 | 2018-03-13 | 东南大学 | 一种具有多重密封效果的一体化伺服液压摆动缸 |
| US10633080B2 (en) * | 2016-07-22 | 2020-04-28 | The Boeing Company | Electronically controlled rotary actuator for an aircraft control surface |
| US11015728B2 (en) * | 2016-08-04 | 2021-05-25 | Woodward, Inc. | Stepper motor driven proportional rotary actuator |
| EP3494310A2 (fr) * | 2016-08-05 | 2019-06-12 | Woodward, Inc. | Actionneur de piston rotatif à chambres multiples |
| US10954973B2 (en) * | 2017-07-14 | 2021-03-23 | Woodward, Inc. | Unsupported piston with moving seal carrier |
| DE102018205638B4 (de) * | 2018-04-13 | 2024-06-13 | Festo Se & Co. Kg | Drehantriebsvorrichtung und damit ausgestatteter Roboterarm eines Roboters |
| WO2021207482A1 (fr) * | 2020-04-08 | 2021-10-14 | Woodward, Inc. | Actionneur du type à piston rotatif, doté d'ensemble d'actionnement central |
| CN114508520A (zh) * | 2020-11-16 | 2022-05-17 | 中国石油化工股份有限公司 | 一种用于连续管的定向器液压集成系统 |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE871557C (de) * | 1945-08-24 | 1953-03-23 | Von Roll Ag | Gelenklose, hydraulische Ringkolben-Antriebseinrichtung |
| US2649077A (en) * | 1951-07-30 | 1953-08-18 | North American Aviation Inc | Piston assembly for oscillatory hydraulic actuators |
| US5044257A (en) * | 1990-03-20 | 1991-09-03 | Keystone International Holdings Corp. | Rotary actuator and method for forming a rotary piston |
| US5054374A (en) * | 1989-12-18 | 1991-10-08 | Keystone International Holdings Corp. | Rotary actuator |
Family Cites Families (15)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US2286452A (en) * | 1940-04-12 | 1942-06-16 | Worth Weldon | Fluid motion transmitting device with synchronizer |
| US2936636A (en) * | 1958-05-02 | 1960-05-17 | Andrew J Wacht | Press |
| ES353491A1 (es) * | 1968-05-03 | 1969-10-01 | Asenjo Ajamil | Un aparato servomotor electrohidraulico para gobierno de timon. |
| FR2138241A1 (fr) * | 1971-05-19 | 1973-01-05 | Etu Rech Appliquees | |
| US3771422A (en) * | 1971-10-13 | 1973-11-13 | Houdaille Industries Inc | Automatic pressure relief and snubbing in hydraulic actuators |
| EP0098614A3 (fr) * | 1982-07-08 | 1984-12-05 | Fmc Corporation | Assemblage rotatif et joint flottant associé |
| US4628797A (en) * | 1983-07-07 | 1986-12-16 | Menasco Inc | Rotary actuator |
| NO175111C (no) * | 1992-06-15 | 1994-08-31 | Kurt Sande | Aktivator for overföring av frem- og tilbakegående dreiebevegelse |
| FR2727477A1 (fr) * | 1994-11-28 | 1996-05-31 | Aerospatiale | Verin rotatif conique et son application a la commande d'une gouverne d'aeronef |
| JPH10110702A (ja) * | 1996-10-08 | 1998-04-28 | Mitsubishi Electric Corp | 回転式油圧アクチュエータ |
| CN2683857Y (zh) * | 2003-10-17 | 2005-03-09 | 颜期威 | 扇形活塞式发动机主体机构 |
| EP1896730B1 (fr) * | 2005-06-30 | 2013-04-10 | James Antony Kells | Actionneur de piston hydraulique toroïdal |
| JP6022757B2 (ja) * | 2011-10-31 | 2016-11-09 | ナブテスコ株式会社 | ロータリーアクチュエータ |
| JP5908262B2 (ja) * | 2011-11-28 | 2016-04-26 | ナブテスコ株式会社 | ロータリーアクチュエータ |
| JP5851298B2 (ja) * | 2012-03-26 | 2016-02-03 | ナブテスコ株式会社 | ロータリーアクチュエータ |
-
2014
- 2014-06-13 WO PCT/US2014/042257 patent/WO2014204799A1/fr active Application Filing
- 2014-06-13 CN CN201480045873.2A patent/CN105723102B/zh active Active
- 2014-06-13 EP EP14736232.1A patent/EP3011190B1/fr active Active
- 2014-06-13 CA CA2915968A patent/CA2915968A1/fr not_active Abandoned
- 2014-06-13 JP JP2016521472A patent/JP2016527449A/ja not_active Withdrawn
- 2014-06-13 BR BR112015031898A patent/BR112015031898A8/pt not_active Application Discontinuation
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE871557C (de) * | 1945-08-24 | 1953-03-23 | Von Roll Ag | Gelenklose, hydraulische Ringkolben-Antriebseinrichtung |
| US2649077A (en) * | 1951-07-30 | 1953-08-18 | North American Aviation Inc | Piston assembly for oscillatory hydraulic actuators |
| US5054374A (en) * | 1989-12-18 | 1991-10-08 | Keystone International Holdings Corp. | Rotary actuator |
| US5044257A (en) * | 1990-03-20 | 1991-09-03 | Keystone International Holdings Corp. | Rotary actuator and method for forming a rotary piston |
Also Published As
| Publication number | Publication date |
|---|---|
| EP3011190A1 (fr) | 2016-04-27 |
| CN105723102A (zh) | 2016-06-29 |
| CN105723102B (zh) | 2019-03-08 |
| BR112015031898A2 (pt) | 2017-07-25 |
| BR112015031898A8 (pt) | 2019-12-31 |
| WO2014204799A1 (fr) | 2014-12-24 |
| JP2016527449A (ja) | 2016-09-08 |
| CA2915968A1 (fr) | 2014-12-24 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP3011190B1 (fr) | Actionneur du type à pistons rotatifs à alimentation hydraulique | |
| US9593696B2 (en) | Rotary piston type actuator with hydraulic supply | |
| EP2961995B1 (fr) | Actionneur du type à piston rotatif comprenant un ensemble d'actionnement central | |
| US10767669B2 (en) | Rotary piston type actuator with a central actuation assembly | |
| US10458441B2 (en) | Rotary piston actuator anti-rotation configurations | |
| US8955425B2 (en) | Rotary piston type actuator with pin retention features | |
| EP2961996B1 (fr) | Actionneur de type à piston rotatif et méthode d'actionnement rotatif | |
| US9476434B2 (en) | Rotary piston type actuator with modular housing | |
| WO2021207482A1 (fr) | Actionneur du type à piston rotatif, doté d'ensemble d'actionnement central | |
| EP3473866B1 (fr) | Configuration pour verin rotatif | |
| EP3099941B1 (fr) | Actionneur de type à piston comprenant éléments de retenue de tige | |
| EP3099942B1 (fr) | Actionneur du type à piston rotatif |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| 17P | Request for examination filed |
Effective date: 20151214 |
|
| AK | Designated contracting states |
Kind code of ref document: A1 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| AX | Request for extension of the european patent |
Extension state: BA ME |
|
| DAX | Request for extension of the european patent (deleted) | ||
| RAP1 | Party data changed (applicant data changed or rights of an application transferred) |
Owner name: WOODWARD, INC. |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: EXAMINATION IS IN PROGRESS |
|
| 17Q | First examination report despatched |
Effective date: 20180907 |
|
| GRAP | Despatch of communication of intention to grant a patent |
Free format text: ORIGINAL CODE: EPIDOSNIGR1 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: GRANT OF PATENT IS INTENDED |
|
| INTG | Intention to grant announced |
Effective date: 20190514 |
|
| GRAS | Grant fee paid |
Free format text: ORIGINAL CODE: EPIDOSNIGR3 |
|
| GRAJ | Information related to disapproval of communication of intention to grant by the applicant or resumption of examination proceedings by the epo deleted |
Free format text: ORIGINAL CODE: EPIDOSDIGR1 |
|
| GRAL | Information related to payment of fee for publishing/printing deleted |
Free format text: ORIGINAL CODE: EPIDOSDIGR3 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: EXAMINATION IS IN PROGRESS |
|
| GRAP | Despatch of communication of intention to grant a patent |
Free format text: ORIGINAL CODE: EPIDOSNIGR1 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: GRANT OF PATENT IS INTENDED |
|
| INTC | Intention to grant announced (deleted) | ||
| INTG | Intention to grant announced |
Effective date: 20190930 |
|
| GRAJ | Information related to disapproval of communication of intention to grant by the applicant or resumption of examination proceedings by the epo deleted |
Free format text: ORIGINAL CODE: EPIDOSDIGR1 |
|
| GRAL | Information related to payment of fee for publishing/printing deleted |
Free format text: ORIGINAL CODE: EPIDOSDIGR3 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: EXAMINATION IS IN PROGRESS |
|
| GRAP | Despatch of communication of intention to grant a patent |
Free format text: ORIGINAL CODE: EPIDOSNIGR1 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: GRANT OF PATENT IS INTENDED |
|
| INTC | Intention to grant announced (deleted) | ||
| INTG | Intention to grant announced |
Effective date: 20191129 |
|
| GRAA | (expected) grant |
Free format text: ORIGINAL CODE: 0009210 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: THE PATENT HAS BEEN GRANTED |
|
| AK | Designated contracting states |
Kind code of ref document: B1 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| REG | Reference to a national code |
Ref country code: GB Ref legal event code: FG4D |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: EP |
|
| REG | Reference to a national code |
Ref country code: AT Ref legal event code: REF Ref document number: 1243465 Country of ref document: AT Kind code of ref document: T Effective date: 20200315 |
|
| REG | Reference to a national code |
Ref country code: IE Ref legal event code: FG4D |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R096 Ref document number: 602014062165 Country of ref document: DE |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: NO Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20200611 Ref country code: FI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20200311 Ref country code: RS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20200311 |
|
| REG | Reference to a national code |
Ref country code: NL Ref legal event code: MP Effective date: 20200311 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: BG Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20200611 Ref country code: GR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20200612 Ref country code: SE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20200311 Ref country code: LV Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20200311 Ref country code: HR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20200311 |
|
| REG | Reference to a national code |
Ref country code: LT Ref legal event code: MG4D |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: NL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20200311 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: PT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20200805 Ref country code: IS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20200711 Ref country code: SK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20200311 Ref country code: SM Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20200311 Ref country code: EE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20200311 Ref country code: LT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20200311 Ref country code: CZ Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20200311 Ref country code: RO Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20200311 |
|
| REG | Reference to a national code |
Ref country code: AT Ref legal event code: MK05 Ref document number: 1243465 Country of ref document: AT Kind code of ref document: T Effective date: 20200311 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R097 Ref document number: 602014062165 Country of ref document: DE |
|
| PLBE | No opposition filed within time limit |
Free format text: ORIGINAL CODE: 0009261 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: NO OPPOSITION FILED WITHIN TIME LIMIT |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20200311 Ref country code: DK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20200311 Ref country code: MC Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20200311 Ref country code: ES Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20200311 Ref country code: AT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20200311 |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: PL |
|
| 26N | No opposition filed |
Effective date: 20201214 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: PL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20200311 Ref country code: SI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20200311 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: LU Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20200613 |
|
| REG | Reference to a national code |
Ref country code: BE Ref legal event code: MM Effective date: 20200630 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: FR Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20200630 Ref country code: LI Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20200630 Ref country code: IE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20200613 Ref country code: CH Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20200630 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: BE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20200630 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: TR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20200311 Ref country code: MT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20200311 Ref country code: CY Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20200311 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20200311 Ref country code: AL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20200311 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: DE Payment date: 20230626 Year of fee payment: 10 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: GB Payment date: 20240627 Year of fee payment: 11 |