EP2998259A1 - Système d'ascenseur et procédé de commande de sécurité d'ascenseur - Google Patents
Système d'ascenseur et procédé de commande de sécurité d'ascenseur Download PDFInfo
- Publication number
- EP2998259A1 EP2998259A1 EP14185329.1A EP14185329A EP2998259A1 EP 2998259 A1 EP2998259 A1 EP 2998259A1 EP 14185329 A EP14185329 A EP 14185329A EP 2998259 A1 EP2998259 A1 EP 2998259A1
- Authority
- EP
- European Patent Office
- Prior art keywords
- elevator
- weight information
- load weight
- measuring device
- control unit
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Withdrawn
Links
- 238000000034 method Methods 0.000 title claims abstract description 11
- 230000000903 blocking effect Effects 0.000 claims description 6
- 230000006870 function Effects 0.000 description 3
- 230000008901 benefit Effects 0.000 description 2
- 230000008859 change Effects 0.000 description 2
- 230000007257 malfunction Effects 0.000 description 2
- 238000005259 measurement Methods 0.000 description 2
- 239000000725 suspension Substances 0.000 description 2
- 229910000831 Steel Inorganic materials 0.000 description 1
- 230000009471 action Effects 0.000 description 1
- 238000010276 construction Methods 0.000 description 1
- 230000001419 dependent effect Effects 0.000 description 1
- 238000010586 diagram Methods 0.000 description 1
- 239000000463 material Substances 0.000 description 1
- 229920002635 polyurethane Polymers 0.000 description 1
- 239000004814 polyurethane Substances 0.000 description 1
- 230000008569 process Effects 0.000 description 1
- 239000010959 steel Substances 0.000 description 1
- 239000012209 synthetic fiber Substances 0.000 description 1
- 229920002994 synthetic fiber Polymers 0.000 description 1
Images


Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66B—ELEVATORS; ESCALATORS OR MOVING WALKWAYS
- B66B5/00—Applications of checking, fault-correcting, or safety devices in elevators
- B66B5/02—Applications of checking, fault-correcting, or safety devices in elevators responsive to abnormal operating conditions
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66B—ELEVATORS; ESCALATORS OR MOVING WALKWAYS
- B66B5/00—Applications of checking, fault-correcting, or safety devices in elevators
- B66B5/02—Applications of checking, fault-correcting, or safety devices in elevators responsive to abnormal operating conditions
- B66B5/14—Applications of checking, fault-correcting, or safety devices in elevators responsive to abnormal operating conditions in case of excessive loads
- B66B5/145—Applications of checking, fault-correcting, or safety devices in elevators responsive to abnormal operating conditions in case of excessive loads electrical
Definitions
- the invention relates to solutions for controlling elevator safety.
- An elevator system may comprise an elevator car operable to move vertically inside an elevator shaft between stopping floors.
- An electric drive unit may be adopted to drive the elevator car.
- the drive unit may include a hoisting machine having an electric motor and a traction sheave mounted to the axis of the electric motor, as well as a power converter for supplying power to the electric motor.
- the elevator car may be coupled to the rotation of the traction sheave via a hoisting roping, such that elevator car moves when the electric motor drives the traction sheave.
- Elevator cars are commonly used for hoisting cargo.
- specific loading equipment trucks etc.
- trucks etc. is often needed to move the cargo to inside the elevator car and also to remove the hoisted cargo afterwards from the elevator car.
- loading / unloading of the car also requires the loading equipment to enter inside the elevator car, in which case it has to be assured that elevator system is dimensioned to carry the extra weight of the loading equipment also.
- An aspect of the invention is an elevator system, comprising an elevator car, an electric drive unit for driving the elevator car, a first measuring device for measuring elevator load weight and also a second measuring device for measuring elevator load weight, the second measuring device being independent of the first measuring device.
- the elevator system further comprises a safety control unit associated with the drive unit.
- the safety control unit comprises an input channel for receiving a first elevator load weight information from the first measuring device, an input channel for receiving a second elevator load weight information from the second measuring device and a comparator configured to compare the first elevator load weight information with the second elevator load weight information and to output a comparison result.
- the safety control unit is configured to selectively allow or block elevator operation based on the comparison result.
- Another aspect of the invention is a method of supervising elevator safety, the method comprising measuring with a first measuring device a first elevator load weight information, measuring with a second measuring device a second elevator load weight information, comparing the first elevator load weight information with the second elevator load weight information, and if the first elevator load weight information deviates from the second elevator load weight information more than is a preset threshold, then blocking elevator operation.
- the elevator drive unit may be dimensioned according to rated weight of cargo without having to take into consideration weight of the loading equipment (truck etc.).
- the second measuring device being independent of the first measuring device means that a change or malfunction in the first measuring device does not affect operation of the second measuring device, and vice versa.
- the term "elevator load” means a load affecting rope tension distribution in the hoisting roping, at opposite sides of traction sheave.
- Such load may be cargo loaded inside an elevator car.
- the weight of said load (load weight) may be measured for example with a pressure sensor of elevator car floor, strain gauge measuring depression of elevator car floor or tension of hoisting roping, or a current sensor measuring motor current required to keep elevator car immovable while brakes open.
- the elevator car is operable to transfer cargo from start floor to destination floor.
- the safety control unit comprises a memory for setting a first comparator threshold value, and that the comparator is configured to create a request for calibration of the measuring device if the deviation between the first elevator load weight information and the second elevator load weight information exceeds the first comparator threshold value.
- the memory is for setting also a second comparator threshold value, the second comparator threshold value being greater that the first comparator threshold value, and that the comparator is configured to block elevator operation if the deviation between the first elevator load weight information and the second elevator load weight information further exceeds the second comparator threshold value.
- the safety control unit includes an overload limit, and the safety control unit is configured to block elevator operation if at least one of the first and the second elevator load weight information exceeds the overload limit.
- the first measuring device is associated with the elevator car.
- the second measuring device is associated with the drive unit.
- the elevator system comprises a user interface for inputting weight information of the load inside the elevator car, the user interface being in communicative connection with the safety control unit.
- the safety control unit is configured to associate the inputted weight information with elevator load weight information issued by the first and / or the second measuring device, for calibrating said measuring device.
- the first elevator load weight information is similar to the second elevator load weight information within the preset threshold, then allowing elevator operation.
- the safety control unit is configured to convert at least one of the first and the second elevator load weight information such that they both refer to a same physical quantity. This means that the corresponding load weight information is / are converter before being compared in the comparator.
- Figure 1 represents an elevator system, which comprises an elevator car 1 and a counterweight 20 fitted to move vertically along guide rails in an elevator shaft 19. Elevator car travels in elevator shaft 19 between stopping floors according to service requests from call-giving devices.
- An elevator control unit 7 is operable to process the service requests and calculate a target speed for movement of the elevator car 1.
- An electric drive unit is mounted near top end of elevator shaft 19.
- the electric drive unit includes a hoisting machine 6 having a permanent magnet motor and a traction sheave mounted to the axis of the permanent magnet motor, as well as a frequency converter 2 connected to the stator of the permanent magnet motor for supplying power to the electric motor.
- the elevator car 1 and the counterweight 20 are suspended with a hoisting roping 21.
- the hoisting roping 21 runs via traction sheave of the hoisting machine 6.
- Permanent magnet motor drives the traction sheave causing elevator car 1 and counterweight 20 to move in opposite directions in elevator shaft 19.
- the electric drive unit is disposed in elevator shaft pit.
- the elevator system has a hoisting roping, which is coupled to the hoisting machine disposed in the pit.
- the elevator system has further a suspension roping which is coupled to at least one pulley near top end of the shaft 19.
- Hoisting machine drives elevator car / counterweight by pulling the hoisting roping, whereas the suspension roping only suspends elevator car / counterweight such that no pulling force is applied to it with the hoisting machine.
- rope is understood to refer to traditional circular ropes as well as belts, which ropes / belts may be manufactured of any suitable materials such as steel wires, synthetic fibers, polyurethane etc.
- the electric drive unit is disposed in a machine room separate from the shaft 19.
- the elevator according to the disclosure may also be implemented without a counterweight.
- the elevator of figure 1 is so called “passenger goods elevator", which means it is suitable for hoisting cargo also.
- the car 1, car frame, safety gear, guide rails and hoisting machine brakes are dimensioned such that a truck or corresponding cargo loading equipment may enter inside the elevator car.
- the electric drive unit (hoisting machine 6 plus frequency converter 2) of the elevator is dimensioned to drive the cargo only, thus it is not capable of hoisting the additional cargo loading equipment.
- the elevator system of figure 1 contains a load monitor, which is implemented as a reciprocal monitor of the elevator car load. Operation and construction of the load monitor is disclosed hereinafter.
- the load monitor has two independent measuring devices 3, 3', 3" for measuring elevator load weight 4. Many different kind of measuring devices may be used in this respect, but the measuring devices 3, 3', 3" used must be independent of each other, e.g. change or malfunction of one measuring device does not affect operation of the other measuring device, and vice versa.
- the measuring device is a strain gauge associated with the elevator car 1.
- the strain gauge 3 is coupled to the elevator car 1 floor to measure floor depression caused by weight of load inside the elevator car 1.
- the strain gauge 3" is coupled to hoisting roping 21 to measure tension of the roping, which changes as the amount of load inside elevator 1 car changes.
- the measuring device is a current sensor 3' adapted to measure stator current of the permanent magnet motor of the hoisting machine 6.
- stator current is directly proportional to motor torque.
- the weight of load can also be determined from the stator current.
- the current sensor 3' is in the main circuit of the frequency converter 2 and it functions as a part of the current control loop during normal operation of the frequency converter 2.
- the load monitor also comprises a computer-based safety control unit 5.
- the safety control unit 5 is connected to elevator car 1 interface unit 22 via a data bus 8A.
- Safety control unit 5 receives from the car interface unit 22 via data bus 8A measurement data from strain gauge 3, 3" associated with the elevator car 1.
- This data represents a first elevator load weight information (information about load inside elevator car 1).
- Safety control unit 5 is further connected to the frequency converter 2 via a second data bus 8B.
- Safety control unit 5 receives measurement data of the current sensor 3' from data bus 8B.
- Safety control unit 5 also receives from the elevator control unit 7 information of elevator operation state.
- the safety control unit 5 also converts the current sensor 3' data to express the weight of the compensated load such that it corresponds to the first elevator load weight information. This converted data represents a second elevator load weight information.
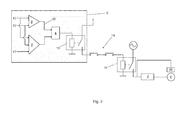
- Safety control unit 5 further includes a software-implemented comparator 9, see figure 2 .
- Output 12 of the comparator 9 controls a safety relay 13, which is connected to elevator safety chain 14, such that safety chain can be selectively opened or closed based on the comparison result from the comparator 9.
- opening of the safety chain 14 causes interruption of power supply to the hoisting machine 6 as well as closing of the hoisting machine brakes 16 to brake the traction sheave, therefore elevator operation can be selectively allowed or blocked based on the comparison result.
- safety chain also other kind of elevator safety configuration may be adopted, but the basic safety operation principle remains, e.g. blocking of elevator operation by interrupting power supply to the hoisting machine 6 as well as closing the hoisting machine brakes 16.
- the comparator 9 is configured to compare the first elevator load weight information 10 received from strain gauge 3, 3" in elevator car 1 with the second elevator load weight information 10' received from current sensor 3' of frequency converter 2.
- the safety control unit 5 comprises a memory into which a first comparator threshold value 11 is stored.
- the comparator 9 creates for elevator service function a request for calibration of the measuring device 3, 3', 3" if the deviation between the first elevator load weight information 10 and the second elevator load weight information 10' exceeds the first comparator threshold value 11.
- the calibration request is represented on a display of manual user interface 18.
- the calibration request is sent to a service center via a remote link.
- Calibration takes place by inputting via the manual user interface 18 in kilograms the amount of load 4 inside the elevator car 1. Said load amount information is sent from elevator control unit 7 to the safety control unit 5. The safety control unit 5 then associates the inputted load amount information with the data received from the measuring devices 3, 3', 3". This action may also be repeated with couple of different loads measuring values to improve the calibration result.
- the memory of the safety control unit 5 further includes a second comparator threshold value 11' stored therein, which second comparator threshold value 11' is greater that the first comparator threshold value 11. If the deviation between the first elevator load weight information 10 and the second elevator load information 10' further exceeds the second comparator threshold value 11', the comparator 9 outputs a comparison result 12 that causes opening of the safety chain 14 and therefore blocking of further elevator operation. Elevator doors are also opened and elevator users are instructed of the detectedd failure. Further, in some embodiments failure information is sent to the remote service center via the remote link.
- the safety control unit also 5 includes an overload limit 17, which is stored in the memory.
- the software-implemented comparator 9' of the safety control unit 5 compares the first and / or the second elevator load weight information 10, 10' to the overload limit 17. If at least one of the first 10 and the second 10' elevator load weight information exceeds the overload limit 17, the safety control unit detects an overload situation and blocks elevator operation by opening the safety chain 14 and keeping it open. Additionally, elevator users are instructed of the detected overload situation. Elevator operation is not allowed until the overload situation is removed, by removing the loading equipment from elevator car 1, removing some of the cargo 4 from elevator car 1 etc..
- two independent strain gauges 3, 3' are used as measuring devices instead of combination of a strain gauge 3, 3" and a current sensor 3'. This means that comparison of the load weight information 10, 10' is possible without opening the machinery brakes 16.
- the strain gauge 3, 3" measuring elevator load can also be disposed in some other location.
- at least one strain gauge 3, 3" is fitted in connection with a rope clamp of the hoisting roping 21.
- at least one strain gauge is fitted in connection with one or more machinery brakes 16 for measuring the braking force of the machinery brake(s) 16. Said braking force corresponds to the weight of load inside the elevator car 1, thus the weight of load can be determined from said braking force.
- the safety control unit 5 disclosed may also include functionality other than the load monitor.
- the safety control unit 5 may be a separate device or it may be combined with some other elevator device, such as the elevator control unit 7 or the frequency converter 2.
Landscapes
- Elevator Control (AREA)
- Maintenance And Inspection Apparatuses For Elevators (AREA)
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP14185329.1A EP2998259A1 (fr) | 2014-09-18 | 2014-09-18 | Système d'ascenseur et procédé de commande de sécurité d'ascenseur |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP14185329.1A EP2998259A1 (fr) | 2014-09-18 | 2014-09-18 | Système d'ascenseur et procédé de commande de sécurité d'ascenseur |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| EP2998259A1 true EP2998259A1 (fr) | 2016-03-23 |
Family
ID=51584973
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP14185329.1A Withdrawn EP2998259A1 (fr) | 2014-09-18 | 2014-09-18 | Système d'ascenseur et procédé de commande de sécurité d'ascenseur |
Country Status (1)
| Country | Link |
|---|---|
| EP (1) | EP2998259A1 (fr) |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP3974367A1 (fr) * | 2020-09-25 | 2022-03-30 | KONE Corporation | Procédé de fonctionnement d'un système d'ascenseur et système d'ascenseur |
| CN115515878A (zh) * | 2020-05-08 | 2022-12-23 | 因温特奥股份公司 | 通过可靠地配置电子安全装置来运行人员运送设备的方法 |
| WO2023147839A1 (fr) | 2022-02-01 | 2023-08-10 | Kone Corporation | Solution de commande de sécurité d'ascenseur |
| DE102023110190A1 (de) * | 2023-04-21 | 2024-10-24 | Tk Elevator Innovation And Operations Gmbh | Verfahren zum Bremsen eines Stufen- oder Palettenbands einer Personenbeförderungsanlage |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH1111817A (ja) * | 1997-06-23 | 1999-01-19 | Hitachi Building Syst Co Ltd | 油圧エレベータ用秤装置の診断装置 |
| DE102004058756A1 (de) * | 2004-12-06 | 2006-06-14 | Siemens Ag | Geschwindigkeitsüberwachungsverfahren in einem Automatisierungssystem für eine Förderanlage |
| EP2022742A1 (fr) * | 2007-08-07 | 2009-02-11 | ThyssenKrupp Elevator AG | Système d'ascenseur |
| WO2009073025A1 (fr) * | 2007-12-05 | 2009-06-11 | Otis Elevator Company | Stratégie de contrôle pour le fonctionnement de deux cabines d'ascenseur dans une seule cage d'ascenseur |
| US20090314584A1 (en) * | 2008-06-19 | 2009-12-24 | Smith Rory S | Rope Tension Equalizer and Load Monitor |
| WO2013115827A1 (fr) * | 2012-02-03 | 2013-08-08 | Otis Elevator Company | Système et procédé pour réduire la vitesse d'une cabine d'ascenseur |
-
2014
- 2014-09-18 EP EP14185329.1A patent/EP2998259A1/fr not_active Withdrawn
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH1111817A (ja) * | 1997-06-23 | 1999-01-19 | Hitachi Building Syst Co Ltd | 油圧エレベータ用秤装置の診断装置 |
| DE102004058756A1 (de) * | 2004-12-06 | 2006-06-14 | Siemens Ag | Geschwindigkeitsüberwachungsverfahren in einem Automatisierungssystem für eine Förderanlage |
| EP2022742A1 (fr) * | 2007-08-07 | 2009-02-11 | ThyssenKrupp Elevator AG | Système d'ascenseur |
| WO2009073025A1 (fr) * | 2007-12-05 | 2009-06-11 | Otis Elevator Company | Stratégie de contrôle pour le fonctionnement de deux cabines d'ascenseur dans une seule cage d'ascenseur |
| US20090314584A1 (en) * | 2008-06-19 | 2009-12-24 | Smith Rory S | Rope Tension Equalizer and Load Monitor |
| WO2013115827A1 (fr) * | 2012-02-03 | 2013-08-08 | Otis Elevator Company | Système et procédé pour réduire la vitesse d'une cabine d'ascenseur |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN115515878A (zh) * | 2020-05-08 | 2022-12-23 | 因温特奥股份公司 | 通过可靠地配置电子安全装置来运行人员运送设备的方法 |
| EP3974367A1 (fr) * | 2020-09-25 | 2022-03-30 | KONE Corporation | Procédé de fonctionnement d'un système d'ascenseur et système d'ascenseur |
| WO2023147839A1 (fr) | 2022-02-01 | 2023-08-10 | Kone Corporation | Solution de commande de sécurité d'ascenseur |
| DE102023110190A1 (de) * | 2023-04-21 | 2024-10-24 | Tk Elevator Innovation And Operations Gmbh | Verfahren zum Bremsen eines Stufen- oder Palettenbands einer Personenbeförderungsanlage |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US10179718B2 (en) | Elevator car overload monitoring to prevent starting | |
| US7222698B2 (en) | Elevator arrangement | |
| AU2013200557B2 (en) | Method for controlling an elevator, and an elevator | |
| EP2537790B1 (fr) | Dispositif ascenseur | |
| CN108455396B (zh) | 电梯安全系统和监控电梯系统的方法 | |
| US9981825B2 (en) | Monitoring elevator traction rope | |
| CN104176576B (zh) | 附带安全装置的电梯 | |
| US11554933B2 (en) | Elevator | |
| KR102065518B1 (ko) | 엘리베이터 장치 | |
| JP2011042480A (ja) | エレベータ装置 | |
| EP2998259A1 (fr) | Système d'ascenseur et procédé de commande de sécurité d'ascenseur | |
| JPH01162690A (ja) | リフト | |
| JP5326474B2 (ja) | エレベータのロープ滑り検出装置及びそれを用いたエレベータ装置 | |
| JP6058160B2 (ja) | エレベータ装置及びその制御方法 | |
| JP4079886B2 (ja) | エレベータの非常止め試験装置 | |
| KR101487623B1 (ko) | 엘리베이터의 권상력 측정방법 | |
| JPWO2011061819A1 (ja) | エレベータ装置 | |
| JP2008222358A (ja) | エレベーターの制御装置 | |
| JP5026078B2 (ja) | エレベータ装置 | |
| JP5791490B2 (ja) | エレベータ非常停止装置およびエレベータ非常停止方法 | |
| JP5829869B2 (ja) | エレベータの非常停止装置 | |
| KR100871514B1 (ko) | 엘리베이터의 제어 시스템 | |
| CN109956381B (zh) | 安全电梯系统 | |
| KR20170011241A (ko) | 엘리베이터 이중브레이크의 제동력 검증 방법 | |
| KR20070024560A (ko) | 엘리베이터의 제어 시스템 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| AK | Designated contracting states |
Kind code of ref document: A1 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| AX | Request for extension of the european patent |
Extension state: BA ME |
|
| 17P | Request for examination filed |
Effective date: 20160921 |
|
| RBV | Designated contracting states (corrected) |
Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| GRAP | Despatch of communication of intention to grant a patent |
Free format text: ORIGINAL CODE: EPIDOSNIGR1 |
|
| INTG | Intention to grant announced |
Effective date: 20170105 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: THE APPLICATION IS DEEMED TO BE WITHDRAWN |
|
| 18D | Application deemed to be withdrawn |
Effective date: 20170516 |