EP2993012A1 - Procédé de commande d'un système de scie murale par sciage en long - Google Patents
Procédé de commande d'un système de scie murale par sciage en long Download PDFInfo
- Publication number
- EP2993012A1 EP2993012A1 EP14003101.4A EP14003101A EP2993012A1 EP 2993012 A1 EP2993012 A1 EP 2993012A1 EP 14003101 A EP14003101 A EP 14003101A EP 2993012 A1 EP2993012 A1 EP 2993012A1
- Authority
- EP
- European Patent Office
- Prior art keywords
- saw
- corner
- blade
- arm
- sin
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Withdrawn
Links
Images







Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B28—WORKING CEMENT, CLAY, OR STONE
- B28D—WORKING STONE OR STONE-LIKE MATERIALS
- B28D7/00—Accessories specially adapted for use with machines or devices of the preceding groups
- B28D7/005—Devices for the automatic drive or the program control of the machines
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B28—WORKING CEMENT, CLAY, OR STONE
- B28D—WORKING STONE OR STONE-LIKE MATERIALS
- B28D1/00—Working stone or stone-like materials, e.g. brick, concrete or glass, not provided for elsewhere; Machines, devices, tools therefor
- B28D1/02—Working stone or stone-like materials, e.g. brick, concrete or glass, not provided for elsewhere; Machines, devices, tools therefor by sawing
- B28D1/04—Working stone or stone-like materials, e.g. brick, concrete or glass, not provided for elsewhere; Machines, devices, tools therefor by sawing with circular or cylindrical saw-blades or saw-discs
- B28D1/042—Working stone or stone-like materials, e.g. brick, concrete or glass, not provided for elsewhere; Machines, devices, tools therefor by sawing with circular or cylindrical saw-blades or saw-discs the saw blade being carried by a pivoted lever
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B28—WORKING CEMENT, CLAY, OR STONE
- B28D—WORKING STONE OR STONE-LIKE MATERIALS
- B28D1/00—Working stone or stone-like materials, e.g. brick, concrete or glass, not provided for elsewhere; Machines, devices, tools therefor
- B28D1/02—Working stone or stone-like materials, e.g. brick, concrete or glass, not provided for elsewhere; Machines, devices, tools therefor by sawing
- B28D1/04—Working stone or stone-like materials, e.g. brick, concrete or glass, not provided for elsewhere; Machines, devices, tools therefor by sawing with circular or cylindrical saw-blades or saw-discs
- B28D1/044—Working stone or stone-like materials, e.g. brick, concrete or glass, not provided for elsewhere; Machines, devices, tools therefor by sawing with circular or cylindrical saw-blades or saw-discs the saw blade being movable on slide ways
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B28—WORKING CEMENT, CLAY, OR STONE
- B28D—WORKING STONE OR STONE-LIKE MATERIALS
- B28D1/00—Working stone or stone-like materials, e.g. brick, concrete or glass, not provided for elsewhere; Machines, devices, tools therefor
- B28D1/02—Working stone or stone-like materials, e.g. brick, concrete or glass, not provided for elsewhere; Machines, devices, tools therefor by sawing
- B28D1/04—Working stone or stone-like materials, e.g. brick, concrete or glass, not provided for elsewhere; Machines, devices, tools therefor by sawing with circular or cylindrical saw-blades or saw-discs
- B28D1/045—Sawing grooves in walls; sawing stones from rocks; sawing machines movable on the stones to be cut
Definitions
- the present invention relates to a method for controlling a wall sawing system when creating a separating cut according to the preamble of claim 1.
- the wall saw system comprises a guide rail and a wall saw with a saw head, a motor feed unit which moves the saw head parallel to a feed direction along the guide rail and at least one saw blade mounted on a saw arm of the saw head and driven by a drive motor about an axis of rotation.
- the saw arm is designed to be pivotable about a pivot axis by means of a swivel motor. By a pivoting movement of the saw arm about the pivot axis, the penetration depth of the saw blade is changed in the workpiece.
- the motorized feed unit comprises a guide carriage and a feed motor, wherein the saw head is mounted on the guide carriage and moved over the feed motor along the guide rail.
- a sensor device with a swivel angle sensor and a displacement sensor is provided.
- the swivel angle sensor measures the instantaneous swivel angle of the saw arm and the travel sensor measures the current position of the saw head on the guide rail.
- the measured values for the current swivel angle of the saw arm and the current position of the saw head are regularly transmitted to a control unit of the wall saw.
- the known method for controlling a wall sawing system is divided into a preparation part and a processing of the separating cut controlled by the control unit.
- the operator places at least the saw blade diameter of the saw blade, the positions of the first and second end points in the feed direction and the final depth of the separating cut; other parameters may be the material of the workpiece to be machined and the dimensions of embedded reinforcing iron.
- the separating cut control unit determines a suitable main cutting sequence of main cuts, the main cutting sequence comprising at least a first main section having a first main cutting angle of the saw arm and a first diameter of the saw blade used, and a following second main section having a second main cutting angle of the saw arm and a first Diameter of the saw blade used.
- the known method for controlling a wall sawing system has the disadvantage that no details for the corner processing of an end point defined as an obstacle are disclosed.
- the object of the present invention is to develop a method of controlling a wall sawing system, in which the corner machining of an obstacle is performed controlled by the control unit of the wall saw.
- a corner cutting sequence with corner cuts is defined, wherein the corner cutting sequence comprises at least a first corner cut with a first corner cut angle of the saw arm and a first diameter of the saw arm used saw blade and a second corner cut with a second corner cut angle of the saw arm and a second diameter of the saw blade used.
- the number of corner cuts that are necessary depends, inter alia, on the specification of the saw blade, the material properties of the workpiece and the power and torque of the drive motor for the saw blade.
- the corner cutting angles can be set by the operator or the control unit of the wall sawing system sets the corner cutting angles depending on different ones Boundary conditions.
- the corner cutting angles represent an input variable which is used to control the wall saw.
- a saw arm length of the saw arm which is defined as the distance between the swivel axis of the saw arm and the axis of rotation of the saw blade, and a distance between the swivel axis and an upper side of the workpiece are set.
- the control unit For a controlled processing of a separating cut, the control unit must be aware of various parameters. These include the shegearmin, which represents a fixed device-specific size of the wall saw, and the vertical distance between the pivot axis and the surface of the workpiece, which also depends on the geometry of the wall saw and the geometry of the guide rail used.
- the first end point is defined as an obstacle
- the control unit calculates a first end position, wherein the pivot axis in the first end position has a position coordinate of X (E 1 ) + D m / 2 - ⁇ sin ( ⁇ ⁇ m ) for
- the pivot axis in the first initial position has a location coordinate of X (E 1 ) + D 1, n / 2 - ⁇ sin ( ⁇ ( ⁇ 1, n ) for
- the first starting position ensures that the pivotal movement occurs in all overcut angles of the overcut sequence before the first end point and the first endpoint is not exceeded.
- the penultimate main section is performed with a blade guard and before the start of the controlled processing additionally a mounting distance ⁇ assembly and a penultimate width for the, used in the penultimate main section, used blade protection, the penultimate width of a first distance of the axis of rotation to the first blade guard edge and a second distance of the axis of rotation to the second blade guard edge is composed.
- the controlled processing is interrupted by the control unit and the wall saw is moved by the control unit into a first parking position.
- the pivot axis has a position coordinate of X (E 1 ) + maximum value of [B 1, m-1 + ⁇ mounting, B 1, m-1 - ⁇ sin ( ⁇ ⁇ m )] for
- the wall saw is positioned after the resumption of controlled machining in a first resume position corresponding to the first parking position. If the control unit determines a resumption position in addition to the parking position, the operator can move the wall saw along the guide rail after the interruption by the operator from the parking position by means of the motorized feed unit. The ability to move the wall saw from the parking position is advantageous for vertical or diagonal cuts in a wall in which the parking position is located above a manageable mounting position. After resuming, the control unit uses the displacement sensor to check the current position of the wall saw. If the current position deviates from the resume position, the wall saw will be positioned in the resume position.
- the second end point is defined as an obstacle
- the control unit calculates a second end position, wherein the pivot axis in the second end position has a position coordinate of X (E 2 ) -D m / 2 - ⁇ sin ( ⁇ ⁇ m ) for
- the pivot axis in the second initial position has a location coordinate of X (E 2 ) - D 2, n / 2 - ⁇ sin ( ⁇ ⁇ 2, n ) for
- the second start position ensures that the pivoting movement takes place in all corner cutting angles of the corner cutting sequence before the second end point and that the second end point is not exceeded.
- the last major cut is made with a blade guard, and before the start of the controlled machining, there is an additional mounting distance ⁇ assembly and a last width for the, used in the last major section, used sheet guard, the last width of a first distance of the axis of rotation to the first blade guard edge and a second distance of the axis of rotation to the second blade guard edge is composed.
- the controlled processing is interrupted by the control unit and the wall saw is moved by the control unit into a second parking position.
- the pivot axis has a position coordinate of X (E 2 ) - maximum value of [B 2, m + ⁇ mounting, B 2, m + ⁇ sin ( ⁇ ⁇ m )] for
- FIG. 1 shows a wall saw 10 with a guide rail 11, one arranged displaceably on the guide rail 11, the tool unit 12 and a remote control 13.
- the power tool is designed as a wall saw 12 and comprises a processing unit 14 and a motor-driven feed unit 15th
- the processing unit is configured as a saw head 14 and includes a saw blade designed as a machining tool 16, which is attached to a saw arm 17 and is driven by a drive motor 18 about a rotational axis 19th
- the saw blade 16 is surrounded by a blade guard 21 which is secured by means of a blade protection holder on the saw arm 17.
- the saw arm 17 is formed by a pivot motor 22 about a pivot axis 23 pivotally.
- the swivel angle ⁇ of the saw arm 17 determines, with a saw blade diameter D of the saw blade 16, how deep the saw blade 16 dips into a workpiece 24 to be machined.
- the drive motor 18 and the pivot motor 22 are arranged in a device housing 25 .
- the motor-driven feed unit 15 comprises a guide carriage 26 and a feed motor 27, which is likewise arranged in the device housing 25 in the exemplary embodiment.
- the saw head 14 is mounted on the guide carriage 26 and formed on the feed motor 27 along the guide rail 11 in a feed direction 28 slidably.
- a control unit 29 for controlling the saw head 14 and the motor feed unit 15 is arranged in addition to the motors 19, 22, 27.
- a sensor device For monitoring the wall sawing system 10 and the machining process, a sensor device is provided with a plurality of sensor elements.
- a first sensor element 32 is designed as a swivel angle sensor and a second sensor element 33 as a displacement sensor.
- the swivel angle sensor 32 measures the current swivel angle of the saw arm 17 and the displacement sensor 33 measures the current position of the saw head 14 on the guide rail 11.
- the measured variables are transmitted from the swivel angle sensor 32 and displacement sensor 33 to the control unit 29 and used to control the wall saw 12.
- the remote control 13 comprises a device housing 35, an input device 36, a display device 37 and a control unit 38, which are arranged in the interior of the device housing 35 is.
- the control unit 38 converts the inputs of the input device 36 into control commands and data, which are transmitted to the wall saw 12 via a first communication link.
- the first communication connection is designed as a wireless and wireless communication connection 41 or as a communication cable 42 .
- the wireless and wireless communication connection is formed in the embodiment as a radio link 41, which is formed between a first radio unit 43 on the remote control 13 and a second radio unit 44 on the power tool 12.
- the wireless and wireless communication link 41 may be in the form of an infrared, Bluetooth, Wi-Fi or Wi-Fi connection.
- FIGS. 2A B show the guide rail 11 and the wall saw 12 of the wall sawing system 10 of FIG. 1 when creating a separating cut 51 in the workpiece 24 of the workpiece thickness d.
- the separating cut 51 has an end depth T and extends in the feed direction 28 between a first end point E 1 and a second end point E 2 .
- a direction parallel to the feed direction 28 is defined, with the positive X direction directed from the first end point E 1 to the second end point E 2
- the Y direction is a direction perpendicular to the X direction in the depth of the workpiece 24 defined.
- the end point of a separation cut can be defined as a free end point without hindrance or as an obstacle. Both endpoints can be defined as free endpoints without obstacles, both endpoints as obstacles or one endpoint as a free endpoint and the other endpoint as an obstacle. At a free endpoint without obstacle, an overlap may be allowed. Due to the overlapping, the cutting depth at the end point reaches the final depth T of the separating cut. In the embodiment of FIGS. 2A , B form the end points E 1 , E 2 free end points without obstruction, wherein at the free first end point E 1, an overlapping is not allowed and at the second end point E 2, an overlap is done.
- FIG. 2A shows the saw head 14 in a mounting position X 0 and the saw arm 17 in a basic position of 0 °.
- the saw head 14 is positioned by the operator by means of the guide carriage 26 in the mounting position X 0 on the guide rail 11.
- the mounting position X 0 of the saw head 14 is between the first and second end point E 1 , E 2 and is determined by the position of the pivot axis 23 in the feed direction 28.
- the position of the pivot axis 23 is particularly suitable as a reference position X Ref for the position monitoring of the saw head 14 and the control of the wall saw 12, since the X position of the pivot axis 23 remains unchanged even during the pivoting movement of the saw arm 17.
- another X position on the saw head 14 can be set as the reference position, in which case the distance in the X direction to the pivot axis 23 must additionally be known.
- the X positions of the first and second end points E 1 , E 2 are defined in the exemplary embodiment by the input of partial lengths.
- the distance between the mounting position X 0 and the first end point E 1 determines a first part length L 1 and the distance between the mounting position X 0 and the second end point E 2 a second part length L 2 .
- the X positions of the end points E 1 , E 2 can be defined by entering a partial length (L 1 or L 2 ) and a total length L as the distance between the end points E 1 , E 2 .
- the separating cut 51 is created in several partial sections until the desired final depth T is reached.
- the partial sections between the first and second end points E 1 , E 2 are defined as main sections and the cutting sequence of the main sections as the main section sequence.
- additional corner processing can be carried out, which in the case of an obstacle is referred to as obstacle processing and in the case of a free end point with overlapping as overcut processing.
- the main cutting sequence can be specified by the operator or the control unit of the wall sawing system determines the main cutting sequence depending on several boundary conditions.
- the first main section which is also referred to as a precut, is executed with a reduced depth of cut and a reduced power of the drive motor in order to prevent polishing of the saw blade.
- the other major sections are usually performed with the same depth of cut, but may also have different depths of cut.
- the boundary conditions usually defined by an operator include the depth of cut of the precut, the power of the precut, and the maximum depth of cut of the other major sections. From these constraints, the control unit can determine the main cutting sequence.
- the main sections of a separating cut are made with a saw blade diameter or with two or more saw blade diameters. If multiple saw blades are used, machining usually begins with the smallest saw blade diameter.
- the saw blade 16 In order to mount the saw blade 16 on the saw arm 17, the saw blade 16 must be arranged in the basic position of the saw arm 17 above the workpiece 24. Whether this boundary condition is satisfied depends on two device-specific sizes of the wall sawing system 10, on the one hand by a vertical distance ⁇ between the pivot axis 23 of the saw arm 17 and a top 53 of the workpiece 24 and on the other by a saw arm length ⁇ of the saw arm 17, which Distance between the axis of rotation 19 of the saw blade 16 and the pivot axis 23 of the saw arm 17 is defined.
- the saw blade 16 is arranged in the basic position above the workpiece 24.
- the saw arm length ⁇ is a fixed device-specific size of the wall saw 12, whereas the vertical Distance ⁇ between the pivot axis 23 and the surface 53 in addition to the geometry of the wall saw 12 also depends on the geometry of the guide rail 11 used.
- the saw blade 16 is mounted on a flange on the saw arm 17 and is driven by the drive motor 18 about the axis of rotation 19 in the sawing operation.
- the pivot angle is 0 ° and the axis of rotation 19 of the saw blade 16 is in the depth direction 52 above the pivot axis 23.
- the saw blade 16 is moved by a pivoting movement of the saw arm 17 about the pivot axis 23 from the basic position at 0 ° in the workpiece 24.
- the saw blade 16 is driven by the drive motor 18 about the axis of rotation 19.
- the saw blade 16 should be surrounded by the blade guard 21 during operation.
- the wall saw 12 is operated with blade guard 21 or without blade guard 21.
- a disassembly of the blade guard 21 may be provided, for example. If different saw blade diameters are used to machine the cut, various blade protectors with appropriate blade guard widths are usually used.
- FIG. 2 B shows the saw arm 17, which is inclined in a negative rotational direction 54 at a negative pivot angle - ⁇ .
- the saw arm 17 is adjustable in the negative direction of rotation 54 between pivot angles of 0 ° to -180 ° and adjustable in a direction opposite to the negative direction of rotation 54, positive direction of rotation 55 between pivot angles of 0 ° to + 180 °.
- arrangement of the saw arm 17 is referred to as a pulling arrangement when the saw head 14 is moved in a positive feed direction 56 . If the saw head 14 is moved in a direction opposite to the positive feed direction 56, negative feed direction 57 , the arrangement of the saw arm 17 is referred to as an abutting arrangement.
- the saw blade 16 generates in the workpiece 24 a cutting wedge in the form of a circle segment with a height h and a width b .
- the height h of the circle segment corresponds to the penetration depth of the saw blade 16 in the workpiece 24.
- D the saw blade diameter
- h the penetration depth of the saw blade 16
- ⁇ the vertical distance between the pivot axis 23 and the upper side 53 of the workpiece 24
- ⁇ the saw arm length and ⁇ denote the first pivot angle
- the control of the wall saw 12 during the separating cut depends on whether the end points are defined as obstacles, and on an obstacle whether the processing is performed with blade guard 21 or without blade guard 21.
- the control of the wall saw 12 in the process according to the invention via upper exit points of the saw blade 16 at the top 53 of the workpiece 24.
- the upper exit points of the saw blade 16 can be from the reference position X Ref the pivot axis 23 in the X direction, calculate the displacement ⁇ x of the rotation axis 19 in the X direction and the width b.
- An upper exit point facing the first end point E 1 is referred to as a first upper exit point 58 and an upper exit point facing the second end point E 2 as a second upper exit point 59 .
- X (58) X Ref + ⁇ x - b / 2
- X (59) X Ref + ⁇ x + b / 2
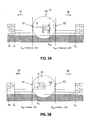
- FIGS. 3A B show the wall sawing system 10 when creating a separating cut between the first end point E 1 and the second end point E 2 , which are defined as obstacles, the machining being done without blade guard 21.
- a first saw blade edge 61 which faces the first end point E 1
- a second saw blade edge 62 which faces the second end point E 2 , form the boundary of the wall saw 12.
- the X positions of the first and second saw blade edges 61, 62 in the X direction can be calculated from the reference position X Ref of the pivot axis 23, the displacement path ⁇ x of the rotation axis 19 and the saw blade diameter D.
- FIG. 3A shows the wall saw 12 with the, in the negative direction of rotation 54 at a negative tilt angle - ⁇ (0 ° to -180 °) inclined Saw arm 17.
- X (61) X Ref + ⁇ sin (- ⁇ ) - D / 2
- X (62) X Ref + ⁇ sin (- ⁇ ) + D / 2.
- 3B shows the wall saw 12 with the, in the positive direction of rotation 55 at a positive pivot angle ⁇ (0 ° to + 180 °), inclined saw arm 17.
- X (61) X Ref + ⁇ sin ( ⁇ ) - D / 2
- X (62) X Ref + ⁇ sin ( ⁇ ) + D / 2.
- FIGS. 4A B show the wall sawing system 10 when creating a separation cut between the first end point E 1 and the second end point E 2 , which are defined as obstacles, wherein the processing is performed with blade guard 21.
- first blade protection edge 71 which faces the first end point E 1
- second blade protection edge 72 which faces the second end point E 2 , the boundary of the wall saw 12th
- the X positions of the first and second blade protection edges 71, 72 in the X direction can be calculated from the reference position X Ref of the pivot axis 23, the displacement path ⁇ x of the rotation axis 19 and the blade guard width B.
- FIG. 4A shows the wall saw 12 with the, under a negative pivot angle - ⁇ (0 ° to -180 °), inclined saw arm 17 and the mounted blade guard 21 of the blade guard width B.
- the distances of the rotation axis 19th determined to the blade guard edges 71, 72, wherein the distance to the first blade protection edge 71 as a first distance B a and the distance to the second blade protection edge 72 as a second distance B b are designated.
- FIG. 4B shows the wall saw 12 with the saw arm 17 inclined at a positive pivot angle ⁇ (0 ° to + 180 °) and the blade guard 21 mounted on the blade guard width B.
- X (71) X Ref + ⁇ sin (FIG. ⁇ ) - B a
- X (72) X Ref + ⁇ sin ( ⁇ ) + B b .
- FIGS. 2A , B show a separation section between two end points E 1 , E 2 , which are defined as free end points without obstacle
- FIGS. 3A , B and 4A, B show a separation cut between two end points E 1 , E 2 , which are defined as obstacles.
- one endpoint is defined as an obstacle and the other endpoint represents a free endpoint without hindrance, the control of the wall saw at the free end point on the upper exit point of the saw blade and obstacle on the saw blade edge (processing without blade guard 21) or the blade guard edge (processing with blade guard 21).
- the first upper exit point 58, the first saw blade edge 61 and the first blade guard edge 71 are grouped together under the term "first boundary" of the wall saw 12 and the second upper exit point 59, the second saw blade edge 62 and the second blade guard edge 72 are termed "second Limitation ".
- FIGS. 5A-N show the wall saw system 10 of FIG. 1 with the guide rail 11 and the wall saw 12 in creating a separation cut of the final depth T in the workpiece 24 between the first end point E 1 , which is defined as an obstacle, and the second end point E 2 , which is defined as an obstacle.
- the processing of the separating cut is carried out with the aid of the method according to the invention for controlling a wall sawing system.
- the separating cut comprises a main cutting sequence of several main cuts made between the first end point E 1 and the second end point E 2 , a first corner cut for the first end point E 1 and a second corner cut for the second end point E 2 .
- the main cutting sequence comprises a first main section having a first main cutting angle ⁇ 1 of the saw arm 17, a first diameter D 1 of the saw blade used and a first width B 1 of the blade guard used, a second main section having a second main cutting angle ⁇ 2 of the saw arm 17, a second diameter D 2 of the saw blade used and a second width B 2 of the blade guard used and a third main section with a third main section angle ⁇ 3 of the saw arm 17, a third diameter D 3 of the saw blade used and a third width B 2 of the blade guard used.
- the first, second and third main section are performed in the embodiment with the saw blade 16 and the associated blade guard 21. Therefore, the diameters D 1 , D 2 , D 3 of the main sections coincide with the saw blade diameter D of the saw blade 16, and the widths B 1 , B 2 , B 3 of the major sections coincide with the blade guard width B of the symmetrical blade guard.
- the main cuts of several saw blades can be made with different saw blade diameters.
- the method according to the invention comprises a process section for changing the saw blade to a different saw blade diameter.
- the main sections are made with a pulling saw arm 17 arranged in a pulling manner.
- the pulling arrangement of the saw arm 17 allows a stable guidance of the saw blade 16 during machining and a narrow cutting gap.
- the saw arm 17 is alternately arranged to be pulled and pushed, the first main section being carried out in a pulling arrangement.
- a separating cut, in which the saw arm 17 is alternately pulled and pushed has the advantage that the non-productive times necessary for positioning the saw head 14 and swiveling the saw arm 17 are reduced compared with a pulling arrangement.
- each main section of the first variant of the method follow one another positioning of the saw head 14, a pivoting movement of the saw arm 17 in the main cutting angle, a machining in a first feed direction, stopping the saw head 14, a pivoting of the saw arm 17 in the negative main cutting angle and editing the main section in a second, opposite feed direction.
- successive positioning of the saw head 14, a pivoting movement of the saw arm 17 in the main cutting angle, an editing in a feed direction and stopping the saw head 14 in a position in which the upper exit point coincides with the end point.
- the third method variant differs from the second method variant in that the last method step of a main section (stopping) and the first method step of the following main section (positioning) are summarized.
- the saw head 14 is stopped in a position calculated so that the upper exit point coincides with the end point after the pivotal movement of the saw arm 17 in the main cutting angle of the following main section.
- the main sections of the main cutting sequence are performed with a saw arm 17, which is arranged alternately pulling and pushing.
- the editing of the separation cut begins at the first end point E 1 .
- the saw head 14 is positioned in a start position X start , in which the pivot axis 23 is at a distance of B / 2 - ⁇ sin (- ⁇ 1 ) from the first end point E 1 .
- the saw arm 17 is pivoted from the basic position at 0 ° in the negative direction of rotation 54 into the negative first main cutting angle - ⁇ 1 .
- the first blade protection edge 71 of the blade guard 21 coincides with the first end point E 1 .
- the saw head 14 is moved with the, under the negative first main cutting angle - ⁇ 1 , inclined saw arm 17 and the rotating saw blade 16 in the positive feed direction 56 ( FIG. 5A ). During the feed movement, the position of the saw head 14 is regularly measured by the displacement sensor 33. The advancing movement of the saw head 14 is stopped when the pivot axis 23 is at a distance from the second end point E 2 of B / 2 + ⁇ sin (- ⁇ 1 ). In this position, the second end cap E 2, facing the second end point E 2, coincides with the second end point E 2 and the first main section is completed.
- the saw arm 17 is pivoted from the negative first main cutting angle - ⁇ 1 into the negative second main cutting angle - ⁇ 2 .
- the distance is set such that the second end blade E 2 facing the second end point E 2 coincides with the second end point E 2 after the pivoting movement of the saw arm 17 into the negative second main cutting angle - ⁇ 2 ( FIG. 5B ).
- the saw head 14 After the pivoting movement into the negative second main cutting angle - ⁇ 2 , the saw head 14 is moved in the negative feed direction 57 to the first end point E 1 , the position of the saw head 14 being measured regularly by the travel sensor 33 during the advancing movement.
- the advancing movement of the saw head 14 is stopped when the pivot axis 23 has a distance of B / 2 - ⁇ sin (- ⁇ 2 ) to the first end point E 1 . In this position, the first blade protection edge 71 adjoins the first end point E 1 and the second main section is terminated ( FIG. 5C ).
- the third main section represents the last main section of the main cutting sequence and before the processing of the last main section, the corner processing of the first end point E 1 takes place .
- For corner processing of the first end point E 1 of the blade guard 21 is removed to remove as much material during the corner processing.
- the wall saw 12 is moved by the control unit 29 in a parking position and the saw arm 17 is pivoted from the negative third main cutting angle - ⁇ 3 in the home position at 0 ° ( FIG. 5F ).
- the blade guard 21 is dismantled in the parking position of the wall saw 12 ( FIG. 5G ).
- the first corner cutting sequence for the first end point E 1 is determined.
- the first corner cut sequence comprises a first corner cut with a first corner cut angle - ⁇ 1,1 of the saw arm 17 and a first diameter D 1,1 of the saw blade used and a second corner cut with a second corner cut angle - ⁇ 1,2 of the saw arm 17 and one second diameter D 1.2 of the saw blade used, wherein the second corner cutting angle - ⁇ 1.2 corresponds to the negative third main cutting angle - ⁇ 3 .
- the first index indicates whether the corner processing is at the first or second end point E 1 , E 2 , where the index "1" stands for the first end point E 1 and the index “2" for the second end point E 2 .
- the second index indicates the step and varies from 1 to n, n ⁇ 2.
- the corner machining of the first end point E 1 is performed with the saw blade 16 and the diameters D 1,1 and D 1,2 coincide with the saw blade diameter D.
- a first start position and a first end position for the corner processing of the first end point E 1 are set.
- the first initial position is calculated in such a way that the pivoting movement takes place in all corner cutting angles - ⁇ 1,1 , - ⁇ 1,2 of the first corner cutting sequence before the first end point E 1 and the first end point E 1 is not exceeded.
- the pivot axis 23 has a position coordinate of X (E 1 ) + D 3 /2- ⁇ sin ( ⁇ ⁇ 3 ) for
- the critical angle at the first corner machining is -90 ° and the negative third main cutting angle - ⁇ 3 is smaller than -90 °, so that the first end position is calculated with the critical angle of -90 °.
- the wall saw 12 is positioned from the parking position to the first initial position and pivoted in the first initial position in the first corner cutting angle - ⁇ 1,1 ( FIG. 5H ).
- saw arm 17 of the saw head 14 is moved in the negative feed direction 57 until the pivot axis 23 has reached the first end position ( FIG. 5l ).
- the saw head 14 is set back to the first initial position ( FIG. 5J ), the saw arm 17 in the second corner cut angle - ⁇ 1 , 2 pivoted ( FIG. 5K ) and the saw head 14 with the under - ⁇ 1.2 inclined saw arm 17 in the negative feed direction 57 until the pivot axis 23 has reached the first end position ( FIG. 5L ).
- the third main cut is carried out with the saw arm 17 tilted under the negative third main cutting angle - ⁇ 3 in the positive feed direction 56 ( FIG. 5 M ).
- the third main section can be pulled through without blade protection until the second saw blade edge 62 of the saw blade 16 is adjacent to the second end point E 2 .
- the advancing movement of the saw head 14 is stopped when the pivot axis 23 is at a distance of D / 2 + ⁇ sin (- ⁇ 3 ) from the second end point E 2 ( FIG. 5N ).
- the second corner cutting sequence for the second end point E 2 is set.
- the second corner cut sequence comprises a first corner cut with a first corner cut angle ⁇ 2.1 of the saw arm 17 and a first diameter D 2.1 of the saw blade used and a second corner cut with a second corner cut angle ⁇ 2.2 of the saw arm 17 and a second diameter D 2 , 2 of the saw blade used, wherein the second corner cut angle ⁇ 22 corresponds to the positive third main section angle ⁇ 3 .
- the corner processing the second end point E 2 is done with the saw blade 16 and the diameter D 2.1 and D 2.2 agree with the saw blade diameter D match.
- a second start position and a second end position are set.
- the second starting position is calculated such that the pivoting movement takes place in all corner cutting angles ⁇ 2,1 , ⁇ 2,2 of the second corner cutting sequence before the second end point E 2 and the second end point E 2 is not exceeded.
- the saw head 14 is moved to the end of the third main section in the second initial position and the saw arm 17 is pivoted in the second initial position in the first corner cutting angle ⁇ 2.1 . With the, under the first corner cutting angle ⁇ 2.1 inclined, saw arm 17 of the saw head 14 is moved in the positive feed direction 56 until the pivot axis 23 has reached the second end position.
- the saw head 14 After the removal in the first corner cut the saw head 14 is set back to the second initial position, the saw arm 17 pivoted in the second initial position in the second corner cutting angle ⁇ 2.2 and the saw head 14 with the inclined saw arm 17 in the positive feed direction 56 in the second end position method.
- the saw head 14 is moved to the end of the second corner cutting sequence in a parking position and the saw arm 17 pivoted in the parking position from the second corner cutting angle ⁇ 2.2 in the home position at 0 °.
- the swinging motions from the negative first main cutting angle - ⁇ 1 to the negative second main cutting angle - ⁇ 2 and from the negative second main cutting angle - ⁇ 2 to the negative third main cutting angle - ⁇ 3 were carried out in one step.
- the decision as to how many steps are required depends, inter alia, on the specification of the saw blade 16, the material properties of the workpiece 24 and the power and torque of the drive motor 18 for the saw blade.
- the intermediate angles can be set by the operator or the control unit 29 of the wall saw 12 determines the intermediate angles depending on various boundary conditions.
- the main cutting angles of the main steps and possible intermediate angles represent an input variable which is used to control the wall saw 12.
- the first corner cut for the first end point E 1 and the second corner cut for the wide end point E 2 each have two corner cuts.
- the corner cuts may have more than two corner cuts.
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Mining & Mineral Resources (AREA)
- Sawing (AREA)
- Processing Of Stones Or Stones Resemblance Materials (AREA)
Priority Applications (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP14003101.4A EP2993012A1 (fr) | 2014-09-08 | 2014-09-08 | Procédé de commande d'un système de scie murale par sciage en long |
| JP2017513096A JP6491322B2 (ja) | 2014-09-08 | 2015-09-03 | 切込形成時のウォールソーシステムの制御方法 |
| EP15759753.5A EP3191282A1 (fr) | 2014-09-08 | 2015-09-03 | Procédé de guidage d'un système de scie murale pour la découpe d'une rainure de joint |
| PCT/EP2015/070101 WO2016037920A1 (fr) | 2014-09-08 | 2015-09-03 | Procédé de guidage d'un système de scie murale pour la découpe d'une rainure de joint |
| US15/509,442 US20170282406A1 (en) | 2014-09-08 | 2015-09-03 | Method for Controlling a Wall Saw System During the Creation of a Separation Cut |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP14003101.4A EP2993012A1 (fr) | 2014-09-08 | 2014-09-08 | Procédé de commande d'un système de scie murale par sciage en long |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| EP2993012A1 true EP2993012A1 (fr) | 2016-03-09 |
Family
ID=51542118
Family Applications (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP14003101.4A Withdrawn EP2993012A1 (fr) | 2014-09-08 | 2014-09-08 | Procédé de commande d'un système de scie murale par sciage en long |
| EP15759753.5A Pending EP3191282A1 (fr) | 2014-09-08 | 2015-09-03 | Procédé de guidage d'un système de scie murale pour la découpe d'une rainure de joint |
Family Applications After (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP15759753.5A Pending EP3191282A1 (fr) | 2014-09-08 | 2015-09-03 | Procédé de guidage d'un système de scie murale pour la découpe d'une rainure de joint |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US20170282406A1 (fr) |
| EP (2) | EP2993012A1 (fr) |
| JP (1) | JP6491322B2 (fr) |
| WO (1) | WO2016037920A1 (fr) |
Families Citing this family (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP2993015A1 (fr) * | 2014-09-08 | 2016-03-09 | HILTI Aktiengesellschaft | Procédé de commande d'un système de scie murale par sciage en long |
| JP6967276B2 (ja) * | 2017-12-28 | 2021-11-17 | 三星ダイヤモンド工業株式会社 | ブレーク装置 |
| EP3925749A1 (fr) * | 2020-06-18 | 2021-12-22 | Hilti Aktiengesellschaft | Système de coupe pourvu d'une scie et procédé d'introduction d'une coupe |
| EP4282608A1 (fr) * | 2022-05-25 | 2023-11-29 | Hilti Aktiengesellschaft | Scie sur pied et procédé d'optimisation du fonctionnement d'une scie sur pied |
Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US6170478B1 (en) * | 1998-10-15 | 2001-01-09 | Richard S. Gorder | Process and apparatus for cutting a chamfer in concrete |
| US20120180773A1 (en) * | 2009-07-31 | 2012-07-19 | Husqvarna Ab | Wall saw and interchangable assemblies for wall saws |
| US20130180371A1 (en) * | 2011-12-23 | 2013-07-18 | Hilti Aktiengesellschaft | Device for cutting a substrate and method for controlling such a cutting device |
| EP1693173B1 (fr) | 2005-02-22 | 2013-11-27 | HILTI Aktiengesellschaft | Procédé de commande pour machine à scier des parois commandable |
| WO2014124931A1 (fr) * | 2013-02-14 | 2014-08-21 | Hilti Aktiengesellschaft | Procédé de commande d'un système d'appareil lors du tronçonnage d'une pièce à usiner le long d'une ligne de découpe |
| WO2014124912A1 (fr) * | 2013-02-14 | 2014-08-21 | Hilti Aktiengesellschaft | Procédé de commande d'un système d'appareil comprenant un appareil d'outillage et un dispositif d'avance motorisé |
| WO2014128095A1 (fr) * | 2013-02-20 | 2014-08-28 | Hilti Aktiengesellschaft | Dispositif de découpe d'une pièce le long d'une ligne de découpe |
-
2014
- 2014-09-08 EP EP14003101.4A patent/EP2993012A1/fr not_active Withdrawn
-
2015
- 2015-09-03 US US15/509,442 patent/US20170282406A1/en not_active Abandoned
- 2015-09-03 WO PCT/EP2015/070101 patent/WO2016037920A1/fr active Application Filing
- 2015-09-03 JP JP2017513096A patent/JP6491322B2/ja active Active
- 2015-09-03 EP EP15759753.5A patent/EP3191282A1/fr active Pending
Patent Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US6170478B1 (en) * | 1998-10-15 | 2001-01-09 | Richard S. Gorder | Process and apparatus for cutting a chamfer in concrete |
| EP1693173B1 (fr) | 2005-02-22 | 2013-11-27 | HILTI Aktiengesellschaft | Procédé de commande pour machine à scier des parois commandable |
| US20120180773A1 (en) * | 2009-07-31 | 2012-07-19 | Husqvarna Ab | Wall saw and interchangable assemblies for wall saws |
| US20130180371A1 (en) * | 2011-12-23 | 2013-07-18 | Hilti Aktiengesellschaft | Device for cutting a substrate and method for controlling such a cutting device |
| WO2014124931A1 (fr) * | 2013-02-14 | 2014-08-21 | Hilti Aktiengesellschaft | Procédé de commande d'un système d'appareil lors du tronçonnage d'une pièce à usiner le long d'une ligne de découpe |
| WO2014124912A1 (fr) * | 2013-02-14 | 2014-08-21 | Hilti Aktiengesellschaft | Procédé de commande d'un système d'appareil comprenant un appareil d'outillage et un dispositif d'avance motorisé |
| WO2014128095A1 (fr) * | 2013-02-20 | 2014-08-28 | Hilti Aktiengesellschaft | Dispositif de découpe d'une pièce le long d'une ligne de découpe |
Also Published As
| Publication number | Publication date |
|---|---|
| WO2016037920A1 (fr) | 2016-03-17 |
| JP2017527471A (ja) | 2017-09-21 |
| EP3191282A1 (fr) | 2017-07-19 |
| JP6491322B2 (ja) | 2019-03-27 |
| US20170282406A1 (en) | 2017-10-05 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP1693173B1 (fr) | Procédé de commande pour machine à scier des parois commandable | |
| EP3027345B2 (fr) | Procédé d'usinage des arêtes de dents et station d'usinage pour mettre en oeuvre ledit procédé | |
| EP2958697B1 (fr) | Appareil pour couper une piéce le long d'une ligne de coupe | |
| EP2956268B1 (fr) | Procédé pour la commande d'une système d'outils avec un outil et un dispositif d'entraînement | |
| EP2956267B1 (fr) | Procédé de contrôle d'un système d'outils pour la coupe d'une pièce le long d'une ligne de coupe | |
| DE102013207028B3 (de) | Federwindemaschine mit einstellbarer Schnitteinrichtung | |
| WO2016037920A1 (fr) | Procédé de guidage d'un système de scie murale pour la découpe d'une rainure de joint | |
| WO2018072877A1 (fr) | Dispositif de meulage de rails | |
| WO2016037891A1 (fr) | Procédé de commande d'un système de scie murale lors de la réalisation d'une coupe | |
| EP2993015A1 (fr) | Procédé de commande d'un système de scie murale par sciage en long | |
| EP3191280A1 (fr) | Procédé de commande d'un système de scie murale lors de la réalisation d'une coupe | |
| EP2993009A1 (fr) | Procédé de commande d'un système de scie murale par sciage en long | |
| EP2993014A1 (fr) | Procédé de commande d'un système de scie murale par sciage en long | |
| EP3191279B1 (fr) | Procédé de commande d'un système de scie murale par sciage en long | |
| EP1136163A2 (fr) | Scie circulaire avec dispositif à inciser | |
| EP2842690A1 (fr) | Dispositif de guidage destiné à usiner une conduite à l'aide d'une machine à main d'enlèvement de copeaux et/ou abrasive, dispositif d'usinage pour des conduites et procédé de sectionnement d'une conduite | |
| DE102011016324A1 (de) | Verfahren und Vorrichtung zum Schleifen einer gekrümmten Oberfläche eines Werkstücks | |
| EP2786823B1 (fr) | Dispositif d'usinage par aiguisement sélectif de lames de scie à ruban et de scie alternative | |
| EP3925749A1 (fr) | Système de coupe pourvu d'une scie et procédé d'introduction d'une coupe |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| AK | Designated contracting states |
Kind code of ref document: A1 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| AX | Request for extension of the european patent |
Extension state: BA ME |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: THE APPLICATION IS DEEMED TO BE WITHDRAWN |
|
| 18D | Application deemed to be withdrawn |
Effective date: 20160910 |