EP2961679B1 - Système de contrôle de freins pour ascenseur - Google Patents
Système de contrôle de freins pour ascenseur Download PDFInfo
- Publication number
- EP2961679B1 EP2961679B1 EP14711000.1A EP14711000A EP2961679B1 EP 2961679 B1 EP2961679 B1 EP 2961679B1 EP 14711000 A EP14711000 A EP 14711000A EP 2961679 B1 EP2961679 B1 EP 2961679B1
- Authority
- EP
- European Patent Office
- Prior art keywords
- brakes
- motor
- electronic circuit
- emergency
- power supply
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Not-in-force
Links
- 230000009471 action Effects 0.000 claims description 8
- 230000001939 inductive effect Effects 0.000 claims description 6
- 238000012544 monitoring process Methods 0.000 claims description 5
- 230000002401 inhibitory effect Effects 0.000 claims description 2
- 230000001960 triggered effect Effects 0.000 claims description 2
- 230000004913 activation Effects 0.000 claims 2
- 235000021183 entrée Nutrition 0.000 description 8
- 238000001514 detection method Methods 0.000 description 4
- 230000008901 benefit Effects 0.000 description 2
- 239000004065 semiconductor Substances 0.000 description 2
- 230000007704 transition Effects 0.000 description 2
- 238000006677 Appel reaction Methods 0.000 description 1
- 241001415961 Gaviidae Species 0.000 description 1
- 230000008859 change Effects 0.000 description 1
- 229940082150 encore Drugs 0.000 description 1
- 238000009434 installation Methods 0.000 description 1
- 230000010354 integration Effects 0.000 description 1
- 230000007257 malfunction Effects 0.000 description 1
- 230000010287 polarization Effects 0.000 description 1
- 238000012797 qualification Methods 0.000 description 1
- 230000009467 reduction Effects 0.000 description 1
- 230000001360 synchronised effect Effects 0.000 description 1
Images
Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66B—ELEVATORS; ESCALATORS OR MOVING WALKWAYS
- B66B1/00—Control systems of elevators in general
- B66B1/24—Control systems with regulation, i.e. with retroactive action, for influencing travelling speed, acceleration, or deceleration
- B66B1/28—Control systems with regulation, i.e. with retroactive action, for influencing travelling speed, acceleration, or deceleration electrical
- B66B1/32—Control systems with regulation, i.e. with retroactive action, for influencing travelling speed, acceleration, or deceleration electrical effective on braking devices, e.g. acting on electrically controlled brakes
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66B—ELEVATORS; ESCALATORS OR MOVING WALKWAYS
- B66B5/00—Applications of checking, fault-correcting, or safety devices in elevators
- B66B5/0006—Monitoring devices or performance analysers
- B66B5/0037—Performance analysers
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66B—ELEVATORS; ESCALATORS OR MOVING WALKWAYS
- B66B5/00—Applications of checking, fault-correcting, or safety devices in elevators
- B66B5/02—Applications of checking, fault-correcting, or safety devices in elevators responsive to abnormal operating conditions
- B66B5/027—Applications of checking, fault-correcting, or safety devices in elevators responsive to abnormal operating conditions to permit passengers to leave an elevator car in case of failure, e.g. moving the car to a reference floor or unlocking the door
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66B—ELEVATORS; ESCALATORS OR MOVING WALKWAYS
- B66B5/00—Applications of checking, fault-correcting, or safety devices in elevators
- B66B5/0087—Devices facilitating maintenance, repair or inspection tasks
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66B—ELEVATORS; ESCALATORS OR MOVING WALKWAYS
- B66B5/00—Applications of checking, fault-correcting, or safety devices in elevators
- B66B5/0087—Devices facilitating maintenance, repair or inspection tasks
- B66B5/0093—Testing of safety devices
Definitions
- the present invention relates to a brake control system for an elevator.
- the current elevators include a motor equipped with power-down brakes which, in normal operating mode, are energized when the car is moving.
- US 2011 / 048863A1 describes a device for controlling two braking members of an elevator, adapted to generate, according to a wiring logic by connectors, actuating signals allowing at least two modes of operation including a normal mode where two actuation signals are provided synchronously to the coils of the braking members, and a test mode of one of the two braking members where an actuating signal is supplied to the coil of the braking member under test, and another signal of actuation to permanently release the second braking member is supplied to the coil of the latter.
- the brake control system combines all the functions necessary for controlling the brakes. Complex wiring outside the system is avoided.
- the system can be qualified and approved to ensure that all functions are met with maximum reliability.
- the operation in emergency mode can be guaranteed, if desired, in a large number of situations such as the absence of current, a failure of the maneuver, a failure of the motor encoder or a failure of the converter supplying the motor, .. some of these situations are not currently covered by some cabling.
- the emergency function operated in emergency mode by the control system according to the invention preferably does not involve engine braking torque by short circuit motor phases. This guarantees a much more efficient backup when the cab is near equilibrium.
- the electronic circuit is preferably arranged such that in case of simultaneous action by an operator on the test inputs of the brakes, they are not powered.
- the electronic circuit advantageously comprises a single printed circuit board.
- the braking power supply is advantageously the 110 V or 230 V single-phase network, possibly via an inverter.
- the electronic circuit is preferably arranged to measure, in emergency mode, the speed of the motor from the voltage at its terminals, and to interrupt the supply of the brakes if a threshold voltage representative of a speed is exceeded. excessive.
- the motor comprises an inductive sensor connected to the electronic circuit and to inform it on the speed of the motor. If excessive speed is detected, brake power is interrupted.
- the intermittent release of the brakes in emergency mode preferably comprises phases of supply of the brakes for a period of between 2 and 8 seconds.
- the intermittent release of the brakes in emergency mode also preferably includes non-supply phases of the brakes for a period of between 2 and 8 seconds.
- the brakes are preferably powered, in normal operating mode, via power terminals connected electrically in series and internally with an emergency cut-off. Thus, this emergency shutdown can interrupt the supply of brakes in case of emergency.
- the brakes are preferably powered, in parallel emergency mode, forcing the closure of this emergency cut.
- the advantage of an internal break in replacement of an external contactor is to reduce the noise generated by the change of state of the contactor, by modifying the location where the contactor is usually located.
- the system may include an arrival detection input on the cabin floor, which changes state upon arrival from the cabin to the floor; operation in mode emergency can be modified to interrupt the opening of the brakes when said arrival arrival detection input is in a state that corresponds to the arrival of the cabin to the floor.
- the system comprises a diode voltage, resistance and varistor voltage clipping circuit, in parallel with each supply output of a brake.
- the electronic circuit according to the invention comprises a microprocessor / microcontroller self-monitoring unit which monitors the coherence of the states of the different inputs and outputs and activates an electromagnetic relay when the operation of the electronic circuit is considered as non-faulty.
- the output of this relay can be used in a safety chain of the elevator.
- the invention also relates to an elevator equipped with a control system according to the invention.
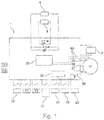
- This system 1 comprises an electronic circuit board, preferably single, supporting a number of components arranged to perform the desired functions.
- the electronic circuit may comprise a microcontroller 20 and the appropriate interfaces and power relays.
- the electronic circuit includes terminals that allow its electrical connection to the various elements controlled by the system or controlling the operation of the brakes.
- a power supply 2 for example 230V 50Hz single phase, which corresponds to the network or an inverter, is connected to the circuit.
- Brakes 4 and 5 are connected to terminal pairs "Brake1" and “Brake2" respectively of the circuit.
- the brakes 4 and 5 are out of power, that is to say that in the unpowered state, they block the rotation of the motor shaft.
- Input 10 is connected to a dimmer that powers the motor or to a controller of elevator operation.
- the output voltage of the drive is present on the motor control terminals 25 to 27 of the electronic circuit.
- the brake to be kept open is selected by means of two respective logic inputs T 1 and T 2 , each connected, for example, to a pushbutton or other switch.
- the brake which remains in normal operation is controlled by the logic input 10 and the energy is taken from the power supply 2.
- the electronic circuit is arranged such that if the inputs T 1 and T 2 are closed simultaneously, the brakes are not powered.
- the transition to emergency mode is validated using a logic input 12 (also called “enable”), connected to a key switch or a chain rescue, for example.
- a logic input 12 also called “enable”
- the control inputs 10 also called “open”
- test T 1 and T 2 are then inhibited and both brakes 4 and 5 are controlled simultaneously, the energy of supply of the brakes being taken from the power supply 2.
- the brakes are controlled in emergency mode by a logic input 14, connected to a push button or a controller of the operation of the elevator.
- the synchronous motor M When the brakes are open, because of the state imposed on the input 14, the synchronous motor M is likely to be driven by the load of the cabin. We measure its speed using the voltage induced at its terminals, connected to the inputs 25 to 27 of the electronic circuit. When the voltage between phases reaches a threshold voltage, for example 280V peak, the system 1 cuts the current in the brakes 4 and 5, in order to stop the rotation of the motor.
- a threshold voltage for example 280V peak
- the frequency converter (not shown) driving the motor M goes into a mode where its output no longer delivers any voltage to the motor during operation in emergency mode.
- the voltage induced at the motor terminals during its rotation, independently of the drive, is then sinusoidal.
- the rescue must be able to be carried out safely even if the engine fails.
- the absence of voltage feedback on the terminals 25 to 27 does not mean that the cabin does not move, because there may be disconnected cables or a burned engine for example.
- the absence of voltage is detected by the system 1 and, in this case, a series of openings / closures is made, for example 5s of opening and 5s of closing of the brakes 4 and 5 until the stoppage of the emergency command, or until the arrival command to the floor on a corresponding input 16 is given.
- Brakes 4 and 5 are powered by the Brake1 and Brake2 terminals respectively.
- the electronic circuit has two cuts independent of the power supply of each brake: a cut made by the rectification electronics, called a "break "service", for example by means of one or more semiconductor components, such as transistors, thyristors or triacs, and a cut made by an electromechanical relay with state recopy, called “emergency cut”.
- the service interruption is controlled by the control input 10 and the emergency cutoff is controlled by the input 12.
- a logic output CS copies the on state or not of the service interruption and a logic output CU copies the whether or not the emergency cut-off occurs. This allows the controller of elevator operation to know the state of these cuts, as would be the case of conventional electromechanical contactors.
- the system 1 supplies the brakes 4 and 5 in live mode via the Brake1 and Brake2 outputs by forcing the closing of the cut-out. emergency.
- the emergency mode must be able to operate in the presence of a first fault on the circuits used in normal mode.
- the redundancy of the brake supply circuits can thus be exploited to provide the emergency mode in the presence of a first fault.
- a diode / resistance / varistor assembly On each output Brake1 and Brake2 is integrated a diode / resistance / varistor assembly, to dissipate the magnetic energy of the brakes in the case of power failure. In the case of shutdown in normal operating mode, energy is dissipated in the brake resistor only
- the electronic circuit comprises a relay 30 which is powered by a microprocessor / microcontroller self-check unit 35 whose role is to check the coherence of the states of the different inputs and outputs of the electronic circuit.
- a microprocessor / microcontroller self-check unit 35 whose role is to check the coherence of the states of the different inputs and outputs of the electronic circuit.
- the supply of the electromagnetic relay 30 ceases, and the corresponding output 40 changes state, which makes it possible, for example, to stop the operation of the elevator installation and / or to signal the malfunction.
- connections with the logic inputs or outputs are advantageously grouped together in a detachable terminal block.
- the power connections such as the supply of the circuit via the 230 V AC network, the connections to the motor and to the brakes are also advantageously grouped together on a detachable terminal block with polarization.
- the invention is not limited to the illustrated example.
- the different functions can be realized with an analog rather than a digital circuit.
- Logic input 16 is optional.
- the electronic circuit does not receive the voltage across the motor.
- the motor can be equipped with an inductive sensor which delivers by a line 60, shown in dotted lines on the figure 1 , to the electronic circuit information about the speed of rotation of the shaft.
- This inductive sensor delivers for example a square signal at 16 periods per revolution.
- the electronic circuit receives both the voltage at the motor terminals and the information transmitted by the inductive sensor via line 60.
Landscapes
- Engineering & Computer Science (AREA)
- Automation & Control Theory (AREA)
- Maintenance And Inspection Apparatuses For Elevators (AREA)
- Elevator Control (AREA)
Description
- La présente invention concerne un système de contrôle de freins pour ascenseur.
- Les ascenseurs actuels comportent un moteur équipé de freins à manque de courant qui, en mode de fonctionnement normal, sont alimentés lorsque la cabine se déplace.
- Des fonctions de test et de secours sont prévues.
-
US 2011/048863A1 décrit un dispositif de commande de deux organes de freinage d'un ascenseur, adapté à générer, selon une logique de câblage par connecteurs, des signaux d'actionnement permettant au moins deux modes de fonctionnement dont un mode normal où deux signaux d'actionnement sont fournis de manière synchrone aux bobines des organes de freinage, et un mode de test de l'un des deux organes de freinage où un signal d'actionnement est fourni à la bobine de l'organe de freinage testé, et un autre signal d'actionnement permettant de relâcher d'une manière permanente le deuxième organe de freinage est fourni à la bobine de ce dernier. - Les fonctions de fonctionnement en mode normal, de test et secours sont actuellement réalisées séparément. Il existe un câblage par fonction, ce qui nécessite des interconnexions entre ces câblages. Il est également parfois nécessaire de prévoir trois ou quatre alimentations électriques. De plus, certains cas de secours ne sont pas toujours couverts.
- La conception, la qualification et la fiabilisation de ces fonctions reste une tâche délicate. En général, un relayage est utilisé. Il existe une combinatoire de commande assez complexe entre les ordres d'ouverture des freins en service normal, en mode test et en mode secours. De plus, les freins restent des organes délicats à piloter, car ils génèrent des surtensions lorsque leur courant d'alimentation est coupé sur le circuit continu, ce qui est le cas de modes test et de secours. Par conséquent, des défaillances de boîtiers d'alimentation sont assez régulièrement observées.
- Il existe aussi un besoin de supprimer les contacteurs pilotant les alimentations de freins, en vue d'opérer une réduction du bruit et une suppression des défaillances possibles des contacteurs.
- L'invention a pour objet de remédier à tout ou partie des inconvénients rencontrés avec les systèmes connus. L'invention a pour objet un système de contrôle de freins pour un ascenseur comportant un moteur électrique d'entraînement de la cabine et au moins deux freins électromagnétiques, à manque de courant, de blocage en rotation de l'arbre du moteur, le système comportant :
- des bornes de raccordement aux freins, à une alimentation électrique des freins, et à diverses entrées de commandes et/ou d'indication d'état de l'ascenseur et/ou du moteur, et
- un circuit électronique relié électriquement auxdites bornes, ce circuit électronique étant agencé pour contrôler le fonctionnement des freins selon divers modes de fonctionnement, dont :
- un mode normal de fonctionnement, dans lequel les freins sont alimentés par ladite alimentation électrique, l'ouverture des freins étant contrôlée par une entrée de contrôle correspondante,
- un mode de test dans lequel l'un ou l'autre des freins peut être maintenu ouvert en étant alimenté en permanence, par action sur une entrée de test correspondante, tandis que l'état de l'autre frein est commandé par ladite entrée de contrôle,
- un mode secours, déclenché par action sur une entrée dite de secours, le passage en mode de secours inhibant l'entrée de contrôle et les entrées de test.
- Le système de contrôle de freins selon l'invention rassemble toutes les fonctions nécessaires au pilotage des freins. Un câblage complexe à l'extérieur du système est évité. Le système peut être qualifié et approuvé pour garantir que la totalité des fonctions soit satisfaite avec une fiabilité maximale.
- L'intégration du système selon l'invention dans un ascenseur est grandement facilitée. De plus, il est possible de mutualiser les composants nécessaires aux trois fonctions et ainsi de bénéficier d'une réduction de coûts. En particulier, une seule alimentation peut être utilisée, si on le souhaite.
- Le fonctionnement en mode secours peut être garanti, si cela est recherché, dans un grand nombre de situations telles que l'absence de courant, une défaillance de la manoeuvre, une défaillance du codeur moteur ou une défaillance du variateur alimentant le moteur, ... certaines de ces situations n'étant aujourd'hui pas couvertes par certains câblages.
- La fonction secours opérée en mode secours grâce au système de contrôle selon l'invention ne fait de préférence pas intervenir de couple de freinage moteur par court-circuit des phases moteur. Cela garantit un secours beaucoup plus efficace en cas de charge de la cabine proche de l'équilibre.
- Le circuit électronique est de préférence agencé de telle sorte qu'en cas d'action simultanée par un opérateur sur les entrées de test des freins, ceux-ci ne sont pas alimentés.
- Le circuit électronique comporte avantageusement une unique carte de circuit imprimé.
- L'alimentation des freins est avantageusement le réseau monophasé 110 V ou 230 V, via un onduleur éventuellement.
- Le circuit électronique est de préférence agencé pour mesurer, en mode secours, la vitesse du moteur à partir de la tension à ses bornes, et pour interrompre l'alimentation des freins en cas de dépassement d'une tension de seuil représentative d'une vitesse excessive. En variante, le moteur comporte un capteur inductif relié au circuit électronique et permettant de renseigner celui-ci sur la vitesse du moteur. En cas de vitesse excessive détectée, l'alimentation des freins est interrompue.
- Le déclenchement intermittent des freins en mode de secours comporte de préférence des phases d'alimentation des freins pendant une durée comprise entre 2 et 8 secondes. Le déclenchement intermittent des freins en mode de secours comporte également, de préférence, des phases de non alimentation des freins pendant une durée comprise entre 2 et 8 secondes.
- Les freins sont de préférence alimentés, en mode de fonctionnement normal, via des bornes d'alimentation reliées électriquement en série et en interne avec une coupure d'urgence. Ainsi, cette coupure d'urgence peut interrompre l'alimentation des freins en cas d'urgence. Les freins sont de préférence alimentés, en mode secours en parallèle, en forçant la fermeture de cette coupure d'urgence.
- L'avantage d'une coupure interne en remplacement d'un contacteur externe est de réduire le bruit généré par le changement d'état du contacteur, en modifiant l'emplacement où se situe habituellement le contacteur.
- Le système peut comporter une entrée de détection d'arrivée à l'étage de la cabine, qui change d'état à l'arrivée de la cabine à l'étage ; le fonctionnement en mode secours peut être modifié pour interrompre l'ouverture des freins lorsque ladite entrée de détection d'arrivée à l'étage est dans un état qui correspond à l'arrivée de la cabine à l'étage.
- Le système comporte avantageusement un circuit d'écrétage de la tension à diode, résistance et varistance, en parallèle de chaque sortie d'alimentation d'un frein.
- Le circuit électronique selon l'invention comporte une unité d'autocontrôle à microprocesseur/microcontroleur qui surveille la cohérence des états des différentes entrées et sorties et active un relais électromagnétique lorsque le fonctionnement du circuit électronique est considéré comme non défaillant. La sortie de ce relais peut être utilisée dans une chaîne de sécurité de l'ascenseur.
- L'invention a encore pour objet un ascenseur équipé d'un système de contrôle selon l'invention.
- L'invention pourra être mieux comprise à la lecture de la description qui va suivre, d'un exemple de mise en oeuvre non limitatif de celle-ci, et à l'examen du dessin annexé, sur lequel :
- la
figure 1 représente de façon schématique un système de contrôle réalisé conformément à l'invention. - On a représenté à la
figure 1 un système 1 de contrôle des freins. - Ce système 1 comporte une carte de circuit électronique, de préférence unique, supportant un certain nombre de composants agencés pour réaliser les fonctions recherchées.
- Le circuit électronique peut comporter un microcontrôleur 20 et les interfaces et relais de puissance adaptés.
- Le circuit électronique comporte des bornes qui permettent sa connexion électrique aux différents éléments commandés par le système ou commandant le fonctionnement des freins.
- Une alimentation 2, par exemple 230V 50Hz monophasé, qui correspond au réseau ou à un onduleur, est raccordée au circuit.
- Des freins 4 et 5 sont raccordés à des couples de bornes « Brake1 » et « Brake2 » respectivement du circuit.
- Lorsqu'un frein 4 ou 5 est commandé en ouverture par le système, la commande se fait de préférence selon la séquence suivante :
- 207V pendant 1s (tension d'appel), tension obtenue par exemple grâce à un redressement par pont complet,
- 103.5V le reste du temps (tension de maintien), tension obtenue par exemple par redressement semi-onde.
- Les freins 4 et 5 sont à manque de courant, c'est-à-dire qu'à l'état non alimenté, ils bloquent la rotation de l'arbre du moteur.
- En mode normal, les deux freins 4 et 5 sont alimentés simultanément, l'énergie nécessaire à leur alimentation étant prélevée sur l'alimentation 2. L'ordre d'ouverture des freins est reçu par le système 1 par une entrée logique 10. Cette entrée 10 est reliée à un variateur qui alimente le moteur ou à un contrôleur du fonctionnement de l'ascenseur.
- En mode test, afin de tester successivement et indépendamment les freins 4 et 5, on maintient un frein alimenté en permanence pendant que l'autre suit le fonctionnement normal.
- En mode normal ou de test, la tension de sortie du variateur est présente sur les bornes de contrôle moteur 25 à 27 du circuit électronique.
- On sélectionne le frein à maintenir ouvert à l'aide de deux entrées logiques respectives T1 et T2, reliées par exemple chacune à un bouton-poussoir ou autre interrupteur.
- Le frein qui reste en fonctionnement normal est piloté par l'entrée logique 10 et l'énergie est prélevée sur l'alimentation 2.
- Le circuit électronique est agencé de telle sorte que si les entrées T1 et T2 sont fermées simultanément, les freins ne sont pas alimentés.
- Le passage en mode secours est validé à l'aide d'une entrée logique 12 (encore appelée « enable »), reliée à un interrupteur à clé ou à une chaîne de secours, par exemple. Lorsque l'entrée 12 indique le passage en mode secours, les entrées de contrôle 10 (encore appelée « open ») et de test T1 et T2 sont alors inhibées et les deux freins 4 et 5 sont commandés simultanément, l'énergie d'alimentation des freins étant prélevée sur l'alimentation 2.
- Les freins sont contrôlés en mode secours par une entrée logique 14, reliée à un bouton-poussoir ou à un contrôleur du fonctionnement de l'ascenseur.
- Lorsque les freins sont ouverts, du fait de l'état imposé à l'entrée 14, le moteur synchrone M est susceptible d'être entrainé par la charge de la cabine. On mesure sa vitesse à l'aide de la tension induite à ses bornes, reliées aux entrées 25 à 27 du circuit électronique. Lorsque la tension entre phases atteint une tension de seuil, par exemple 280V crête, le système 1 coupe le courant dans les freins 4 et 5, afin d'arrêter la rotation du moteur.
- Le variateur de fréquence (non représenté) pilotant le moteur M passe dans un mode où sa sortie ne délivre plus aucune tension au moteur lors du fonctionnement en mode secours. La tension induite aux bornes du moteur lors de sa rotation, indépendamment du variateur, est alors sinusoïdale.
- Lorsque le moteur est piloté en mode de fonctionnement normal ou en mode test, la tension de sortie du variateur est présente sur les bornes 25 à 27.
- Le secours doit pouvoir être réalisé en toute sécurité même si le moteur est défaillant. Ainsi, lors du secours, l'absence de retour de tension sur les bornes 25 à 27 ne signifie pas que la cabine ne bouge pas, car il peut exister des câbles débranchés ou un moteur brûlé par exemple. L'absence de tension est détectée par le système 1 et, dans ce cas, on réalise une succession d'ouvertures/fermetures, par exemple 5s d'ouverture et 5s de fermeture des freins 4 et 5 jusqu'à l'arrêt de la commande de secours, ou jusqu'à ce que la commande d'arrivée à l'étage sur une entrée correspondante 16 soit donnée.
- Les freins 4 et 5 sont alimentés respectivement par les bornes Brake1 et Brake2. Afin de satisfaire l'exigence de la norme EN81-1 et A3 §12.4.2.3.1, le circuit électronique dispose de deux coupures indépendantes de l'alimentation de chaque frein : une coupure réalisée par l'électronique de redressement, appelée « coupure de service », par exemple grâce à un ou plusieurs composants à semi-conducteur, tels que des transistors, thyristors ou triacs, et une coupure réalisée par un relais électromécanique à recopie d'état, appelée «coupure d'urgence ». La coupure de service est pilotée par l'entrée de contrôle 10 et la coupure d'urgence est pilotée par l'entrée 12. Une sortie logique CS recopie l'état passant ou non de la coupure de service et une sortie logique CU recopie l'état passant ou non de la coupure d'urgence. Cela permet au contrôleur du fonctionnement de l'ascenseur de connaître l'état de ces coupures, comme cela serait le cas des contacteurs électromécaniques conventionnels.
- Afin de s'affranchir de la coupure d'urgence, qui est ouverte en cas d'absence de réseau, le système 1 alimente en mode secours les freins 4 et 5 en direct par les sorties Brake1 et Brake2 en forçant la fermeture de la coupure d'urgence.
- Le mode secours doit pouvoir fonctionner en présence d'un premier défaut sur les circuits utilisés en mode normal. La redondance des circuits d'alimentation des freins peut donc être exploitée pour assurer le mode secours en présence d'un premier défaut.
- On intègre sur chaque sortie Brake1 et Brake2 un ensemble diode/résistance/varistance, pour dissiper l'énergie magnétique des freins dans le cas de la coupure du courant. Dans le cas de la coupure en mode de fonctionnement normal, l'énergie est dissipée dans la résistance du frein uniquement
- Le circuit électronique comporte un relais 30 qui est alimenté par une unité d'autocontrôle à microprocesseur/microcontrôleur 35 dont le rôle est de vérifier la cohérence des états des différentes entrées et sorties du circuit électronique. En cas d'anomalie, l'alimentation du relais électromagnétique 30 cesse, et la sortie correspondante 40 change d'état, ce qui permet par exemple d'arrêter le fonctionnement de l'installation d'ascenseur et/ou de signaler le dysfonctionnement.
- Les connexions avec les entrées ou sorties logiques sont avantageusement regroupées au sein d'un bornier débrochable avec détrompeur.
- Les connexions de puissance, telles que l'alimentation du circuit par le réseau 230 V AC, les connexions au moteur et aux freins sont également avantageusement regroupées sur un bornier débrochable avec détrompeur.
- L'invention n'est pas limitée à l'exemple illustré.
- On peut par exemple réaliser les différentes fonctions avec un circuit analogique plutôt que numérique.
- L'entrée logique 16 est facultative.
- Dans une variante, le circuit électronique ne reçoit pas la tension aux bornes du moteur. Dans ce cas, le moteur peut être équipé d'un capteur inductif qui délivre par une ligne 60, illustré en pointillés sur la
figure 1 , au circuit électronique une information concernant la vitesse de rotation de l'arbre. Ce capteur inductif délivre par exemple un signal carré à 16 périodes par révolution. - En variante encore, le circuit électronique reçoit à la fois la tension aux bornes du moteur et l'information transmise par le capteur inductif via la ligne 60.
Claims (15)
- Système (1) de contrôle de freins pour un ascenseur, comportant un moteur électrique d'entraînement de la cabine et au moins deux freins électromagnétiques (4,5), à manque de courant, de blocage en rotation de l'arbre du moteur, le système comportant :- des bornes (Brake1, Brake2) de raccordement aux freins, à une alimentation électrique (2) des freins, et à diverses entrées (10, T1, T2, 12, 14, 16, 25, 26, 27) de commande et/ou d'indication d'état de l'ascenseur et/ou du moteur, et- un circuit électronique relié électriquement auxdites bornes, ce circuit électronique étant agencé pour contrôler le fonctionnement des freins selon divers modes de fonctionnement, dont :- un mode normal de fonctionnement, dans lequel les freins (4, 5) sont alimentés par ladite alimentation électrique (2), l'ouverture des freins étant contrôlée par une entrée de contrôle (10) correspondante,- un mode de test dans lequel l'un ou l'autre des freins peut être maintenu ouvert en étant alimenté en permanence, par action sur une entrée de test correspondante (T1; T2), tandis que l'état de l'autre frein est commandé par ladite entrée de contrôle (10),- un mode secours, déclenché par action sur une entrée (12) dite de secours, le passage en mode de secours inhibant l'entrée de contrôle (10) et les entrées de test (T1; T2), charactérisé en ce que le circuit électronique comporte une unité (35) d'autocontrôle à microprocesseur ou microcontrôleur, de surveillance de la cohérence des états des différentes entrées et sorties, et un relais (30) cessant d'être alimenté par l'unité d'autocontrôle (35) en cas de détection d'une anomalie de fonctionnement.
- Système selon la revendication 1, la tension et/ou la vitesse aux bornes du moteur étant surveillée dans le mode secours et, en cas de détection d'une défaillance du moteur, les freins (4, 5) sont alimentés de façon intermittente de manière à permettre un déplacement de la cabine.
- Système selon la revendication 1 ou 2, le circuit électronique étant agencé de telle sorte qu'en cas d'action simultanée par un opérateur sur les deux entrées de test (T1, T2) des freins, ceux-ci ne sont pas alimentés.
- Système selon l'une des revendications précédentes, le circuit électronique comportant une unique carte de circuit imprimé.
- Système selon l'une quelconque des revendications précédentes, l'alimentation (2) des freins étant le réseau monophasé 110 V ou 230 V.
- Système selon l'une quelconque des revendications précédentes, le circuit électronique étant agencé pour mesurer en mode secours la vitesse du moteur à partir de la tension à ses bornes et pour interrompre l'alimentation des freins en cas de dépassement d'une tension de seuil représentative d'une vitesse excessive.
- Système selon l'une quelconque des revendications 1 à 5, le circuit électronique étant agencé pour recevoir un signal d'un capteur de vitesse inductif du moteur et pour interrompre l'alimentation des freins en cas de vitesse excessive.
- Système selon l'une quelconque des revendications précédentes, le déclenchement intermittent des freins en mode de secours comportant des phases d'alimentation des freins pendant une durée comprise entre 2 et 8 secondes.
- Système selon l'une quelconque des revendications précédentes, le déclenchement intermittent des freins en mode de secours comportant des phases de non alimentation des freins pendant une durée comprise entre 2 et 8 secondes.
- Système selon l'une quelconque des revendications précédentes, les freins étant alimentés via des bornes d'alimentation reliées électriquement en série et en interne avec une coupure d'urgence, notamment un relais électromagnétique à recopie d'état, et une coupure de service, notamment réalisée par une électronique de redressement de la tension envoyée aux freins.
- Système selon la revendication 10, comportant une sortie logique recopiant l'état passant ou non de la coupure d'urgence et /ou comportant une sortie logique recopiant l'état passant ou non de la coupure de service.
- Système selon l'une quelconque des revendications précédentes, les freins étant alimentés en mode secours en parallèle.
- Système selon l'une quelconque des revendications précédentes, comportant une entrée (16) de détection d'arrivée à l'étage de la cabine, qui change d'état à l'arrivée de la cabine à l'étage, le fonctionnement en mode secours étant modifié pour interrompre l'ouverture des freins (4, 5) lorsque ladite entrée de détection d'arrivée à l'étage et dans un état qui correspond à l'arrivée de la cabine à l'étage.
- Système selon l'une quelconque des revendications précédentes, comportant un circuit à diode, résistance et varistance, en parallèle de chaque sortie d'alimentation d'un frein.
- Ascenseur équipé d'un système tel que défini dans l'une quelconque des revendications précédentes.
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| FR1351879A FR3002766B1 (fr) | 2013-03-01 | 2013-03-01 | Systeme de controle de freins pour ascenseur |
| PCT/IB2014/059307 WO2014132222A1 (fr) | 2013-03-01 | 2014-02-27 | Systeme de controle de freins pour ascenseur |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| EP2961679A1 EP2961679A1 (fr) | 2016-01-06 |
| EP2961679B1 true EP2961679B1 (fr) | 2017-11-01 |
Family
ID=48795649
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP14711000.1A Not-in-force EP2961679B1 (fr) | 2013-03-01 | 2014-02-27 | Système de contrôle de freins pour ascenseur |
Country Status (5)
| Country | Link |
|---|---|
| EP (1) | EP2961679B1 (fr) |
| CN (1) | CN203820214U (fr) |
| ES (1) | ES2657899T3 (fr) |
| FR (1) | FR3002766B1 (fr) |
| WO (1) | WO2014132222A1 (fr) |
Families Citing this family (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP3190076B1 (fr) * | 2016-01-07 | 2019-06-12 | Kone Corporation | Rétroaction de mouvement dans un ascenseur |
| EP3351499B1 (fr) * | 2017-01-24 | 2020-11-18 | Otis Elevator Company | Système d'ascenseur |
| EP3793925B1 (fr) | 2018-05-17 | 2022-05-18 | Inventio AG | Système de commande d'inspection d'une installation d'ascenseur ainsi que procédé de commutation d'une installation d'ascenseur entre un fonctionnement normal et un fonctionnement d'inspection |
| CN110606427B (zh) * | 2019-08-12 | 2021-08-03 | 上海三菱电梯有限公司 | 电梯一体驱动装置 |
| GB2591148B (en) * | 2020-01-17 | 2022-09-28 | Tridonic Gmbh & Co Kg | Driver for emergency lighting means |
| CN115321293B (zh) * | 2022-08-04 | 2023-09-26 | 浙江梅轮电梯股份有限公司 | 一种电梯单边制停测试装置 |
Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20110132696A1 (en) * | 2008-08-18 | 2011-06-09 | Andreas Dorsch | Method for monitoring a brake system in an elevator system and corresponding brake monitor for an elevator system |
Family Cites Families (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US6196355B1 (en) * | 1999-03-26 | 2001-03-06 | Otis Elevator Company | Elevator rescue system |
| ES2538109T3 (es) * | 2008-06-03 | 2015-06-17 | Otis Elevator Company | Freno de elevador |
-
2013
- 2013-03-01 FR FR1351879A patent/FR3002766B1/fr not_active Expired - Fee Related
- 2013-11-13 CN CN201320723263.6U patent/CN203820214U/zh not_active Expired - Fee Related
-
2014
- 2014-02-27 EP EP14711000.1A patent/EP2961679B1/fr not_active Not-in-force
- 2014-02-27 ES ES14711000.1T patent/ES2657899T3/es active Active
- 2014-02-27 WO PCT/IB2014/059307 patent/WO2014132222A1/fr not_active Ceased
Patent Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20110132696A1 (en) * | 2008-08-18 | 2011-06-09 | Andreas Dorsch | Method for monitoring a brake system in an elevator system and corresponding brake monitor for an elevator system |
Also Published As
| Publication number | Publication date |
|---|---|
| FR3002766A1 (fr) | 2014-09-05 |
| FR3002766B1 (fr) | 2015-04-10 |
| WO2014132222A1 (fr) | 2014-09-04 |
| EP2961679A1 (fr) | 2016-01-06 |
| ES2657899T3 (es) | 2018-03-07 |
| CN203820214U (zh) | 2014-09-10 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP2961679B1 (fr) | Système de contrôle de freins pour ascenseur | |
| EP2517347B1 (fr) | Onduleur reconfigurable, a tolerance de pannes, pour l'alimentation d'un moteur polyphase synchrone a aimants permanents, et ensemble desdits onduleur et moteur | |
| US9239572B2 (en) | Safety switching device for setting a safety-related device to a safe state | |
| JP6831630B2 (ja) | オルタネータ整流器ダイオード短絡故障を検出するための方法および装置 | |
| FR2778799A1 (fr) | Systeme de pilotage pour un moteur electrique a excitation permanente a au moins une phase | |
| FR2713843A1 (fr) | Dispositif de commande à microprocesseur et circuits associés de commande et de détection pour un démarreur/générateur. | |
| EP1674417B1 (fr) | Dispositif de sécurité pour ascenseur | |
| TR201807531T4 (tr) | Bir asansör sistemi için emniyet devresi. | |
| FR3031844A1 (fr) | Procede de commande d'une machine electrique synchrone a aimants permanents | |
| CA2364846C (fr) | Systeme de distribution d'energie electrique et contacteur pour un tel systeme | |
| EP2407993A1 (fr) | Relai de surveillance de circuit de déclenchement amélioré pour applications à faible et moyenne tensions | |
| EP0982825A1 (fr) | Dispositif de contrôle de la vitesse de rotation d'un moteur électrique et appareil de centrifugation équipé d'un tel dispositif | |
| EP3869659A1 (fr) | Système d'alimentation électrique comprenant une pluralité de batteries | |
| FR2910688A1 (fr) | Systeme de commande de mecanismes de controle de barres de reacteur nucleaire. | |
| FR2931995A1 (fr) | Dispositif de commande d'un moteur de sectionneur electrique | |
| FR3012121A1 (fr) | Vehicule comprenant un ascenseur, notamment destine a recevoir des passagers | |
| EP1779351B1 (fr) | Actionneur electrique de volet roulant avec interface de commande a contacts electriques a ouverture | |
| EP0539301A1 (fr) | Dispositif de couplage d'une source extérieure d'alimentation en énergie électrique à un avion au sol | |
| RU2305355C1 (ru) | Способ контроля успешного срабатывания выключателя пункта автоматического включения резерва в кольцевой сети, питающейся от разных шин двухтрансформаторной подстанции | |
| FR2956881A1 (fr) | Systeme de commande-controle de l'angle de calage des pales d'une eolienne | |
| EP2999084B1 (fr) | Dispositif d'interconnexion électrique pour inverseur de source, et inverseur de source comprenant un tel dispositif | |
| FR3000316A1 (fr) | Systeme de secours pour pompes de turbine | |
| JPWO2019240168A1 (ja) | ブレーキ回路放電システム | |
| KR20090004004A (ko) | 삼상유도전동기의 리액터식 절전구동장치 | |
| EP1938468B1 (fr) | Procede de commande filaire d'un equipement domotique muni d'un moteur electrique |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| 17P | Request for examination filed |
Effective date: 20151001 |
|
| AK | Designated contracting states |
Kind code of ref document: A1 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| AX | Request for extension of the european patent |
Extension state: BA ME |
|
| DAX | Request for extension of the european patent (deleted) | ||
| 17Q | First examination report despatched |
Effective date: 20160711 |
|
| GRAP | Despatch of communication of intention to grant a patent |
Free format text: ORIGINAL CODE: EPIDOSNIGR1 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: GRANT OF PATENT IS INTENDED |
|
| RIC1 | Information provided on ipc code assigned before grant |
Ipc: B66B 5/02 20060101ALI20170428BHEP Ipc: B66B 1/32 20060101ALI20170428BHEP Ipc: B66B 5/00 20060101AFI20170428BHEP |
|
| INTG | Intention to grant announced |
Effective date: 20170524 |
|
| GRAS | Grant fee paid |
Free format text: ORIGINAL CODE: EPIDOSNIGR3 |
|
| GRAA | (expected) grant |
Free format text: ORIGINAL CODE: 0009210 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: THE PATENT HAS BEEN GRANTED |
|
| AK | Designated contracting states |
Kind code of ref document: B1 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| REG | Reference to a national code |
Ref country code: GB Ref legal event code: FG4D Free format text: NOT ENGLISH |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: EP Ref country code: AT Ref legal event code: REF Ref document number: 941808 Country of ref document: AT Kind code of ref document: T Effective date: 20171115 |
|
| REG | Reference to a national code |
Ref country code: IE Ref legal event code: FG4D Free format text: LANGUAGE OF EP DOCUMENT: FRENCH |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R096 Ref document number: 602014016550 Country of ref document: DE |
|
| REG | Reference to a national code |
Ref country code: FR Ref legal event code: PLFP Year of fee payment: 5 |
|
| REG | Reference to a national code |
Ref country code: ES Ref legal event code: FG2A Ref document number: 2657899 Country of ref document: ES Kind code of ref document: T3 Effective date: 20180307 Ref country code: NL Ref legal event code: MP Effective date: 20171101 |
|
| REG | Reference to a national code |
Ref country code: LT Ref legal event code: MG4D |
|
| REG | Reference to a national code |
Ref country code: AT Ref legal event code: MK05 Ref document number: 941808 Country of ref document: AT Kind code of ref document: T Effective date: 20171101 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: NL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20171101 Ref country code: SE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20171101 Ref country code: NO Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20180201 Ref country code: LT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20171101 Ref country code: FI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20171101 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: RS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20171101 Ref country code: AT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20171101 Ref country code: HR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20171101 Ref country code: GR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20180202 Ref country code: BG Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20180201 Ref country code: IS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20180301 Ref country code: LV Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20171101 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20171101 Ref country code: CZ Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20171101 Ref country code: DK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20171101 Ref country code: CY Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20171101 Ref country code: EE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20171101 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R097 Ref document number: 602014016550 Country of ref document: DE |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: PL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20171101 Ref country code: RO Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20171101 Ref country code: SM Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20171101 |
|
| PLBE | No opposition filed within time limit |
Free format text: ORIGINAL CODE: 0009261 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: NO OPPOSITION FILED WITHIN TIME LIMIT |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: PL |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20171101 Ref country code: MC Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20171101 |
|
| 26N | No opposition filed |
Effective date: 20180802 |
|
| GBPC | Gb: european patent ceased through non-payment of renewal fee |
Effective date: 20180227 |
|
| REG | Reference to a national code |
Ref country code: IE Ref legal event code: MM4A |
|
| REG | Reference to a national code |
Ref country code: BE Ref legal event code: MM Effective date: 20180228 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: CH Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20180228 Ref country code: LU Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20180227 Ref country code: SI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20171101 Ref country code: LI Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20180228 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20180227 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: GB Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20180227 Ref country code: BE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20180228 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: DE Payment date: 20190228 Year of fee payment: 6 Ref country code: IT Payment date: 20190212 Year of fee payment: 6 Ref country code: ES Payment date: 20190301 Year of fee payment: 6 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: FR Payment date: 20190213 Year of fee payment: 6 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: TR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20171101 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: PT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20171101 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MK Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20171101 Ref country code: HU Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT; INVALID AB INITIO Effective date: 20140227 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: AL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20171101 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R119 Ref document number: 602014016550 Country of ref document: DE |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: DE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20200901 Ref country code: FR Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20200229 |
|
| REG | Reference to a national code |
Ref country code: ES Ref legal event code: FD2A Effective date: 20210707 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IT Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20200227 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: ES Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20200228 |