EP2825146B1 - Aktivbandage für die motorische neurorehabilitation der beine, system mit einer derartigen aktivbandage und verfahren zum betrieb eines solchen systems - Google Patents
Aktivbandage für die motorische neurorehabilitation der beine, system mit einer derartigen aktivbandage und verfahren zum betrieb eines solchen systems Download PDFInfo
- Publication number
- EP2825146B1 EP2825146B1 EP13715459.7A EP13715459A EP2825146B1 EP 2825146 B1 EP2825146 B1 EP 2825146B1 EP 13715459 A EP13715459 A EP 13715459A EP 2825146 B1 EP2825146 B1 EP 2825146B1
- Authority
- EP
- European Patent Office
- Prior art keywords
- supporting
- patient
- orthosis
- handling
- supporting means
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 230000033001 locomotion Effects 0.000 title claims description 70
- 210000003141 lower extremity Anatomy 0.000 title claims description 32
- 230000000926 neurological effect Effects 0.000 title claims description 10
- 238000000034 method Methods 0.000 title description 14
- 230000008569 process Effects 0.000 title description 7
- 210000000689 upper leg Anatomy 0.000 claims description 49
- 210000002303 tibia Anatomy 0.000 claims description 38
- 210000002414 leg Anatomy 0.000 claims description 37
- 210000003423 ankle Anatomy 0.000 claims description 29
- 210000001624 hip Anatomy 0.000 claims description 28
- 210000002683 foot Anatomy 0.000 claims description 21
- 210000004197 pelvis Anatomy 0.000 claims description 16
- 230000004913 activation Effects 0.000 claims description 15
- 229910000831 Steel Inorganic materials 0.000 claims description 14
- 210000003127 knee Anatomy 0.000 claims description 14
- 239000010959 steel Substances 0.000 claims description 14
- 239000000463 material Substances 0.000 claims description 11
- 230000002829 reductive effect Effects 0.000 claims description 8
- 230000009471 action Effects 0.000 claims description 6
- 239000003638 chemical reducing agent Substances 0.000 claims description 4
- 230000003993 interaction Effects 0.000 claims description 4
- 230000008859 change Effects 0.000 claims description 3
- 238000004092 self-diagnosis Methods 0.000 claims description 2
- 238000013519 translation Methods 0.000 claims description 2
- 230000036961 partial effect Effects 0.000 description 16
- 230000005021 gait Effects 0.000 description 15
- 238000001994 activation Methods 0.000 description 14
- 239000000725 suspension Substances 0.000 description 11
- 238000011282 treatment Methods 0.000 description 9
- 210000003414 extremity Anatomy 0.000 description 8
- 230000007170 pathology Effects 0.000 description 8
- 125000006850 spacer group Chemical group 0.000 description 7
- 210000003205 muscle Anatomy 0.000 description 6
- 230000001225 therapeutic effect Effects 0.000 description 6
- 238000002560 therapeutic procedure Methods 0.000 description 6
- 239000004677 Nylon Substances 0.000 description 5
- 230000006399 behavior Effects 0.000 description 5
- 230000037396 body weight Effects 0.000 description 5
- 230000000694 effects Effects 0.000 description 5
- 229920001778 nylon Polymers 0.000 description 5
- 238000011156 evaluation Methods 0.000 description 4
- 238000002599 functional magnetic resonance imaging Methods 0.000 description 4
- 210000001503 joint Anatomy 0.000 description 4
- 230000037230 mobility Effects 0.000 description 4
- 239000004753 textile Substances 0.000 description 4
- 229920001780 ECTFE Polymers 0.000 description 3
- 239000004411 aluminium Substances 0.000 description 3
- 229910052782 aluminium Inorganic materials 0.000 description 3
- XAGFODPZIPBFFR-UHFFFAOYSA-N aluminium Chemical compound [Al] XAGFODPZIPBFFR-UHFFFAOYSA-N 0.000 description 3
- 230000008901 benefit Effects 0.000 description 3
- 210000004556 brain Anatomy 0.000 description 3
- 238000006243 chemical reaction Methods 0.000 description 3
- 238000010276 construction Methods 0.000 description 3
- 230000006872 improvement Effects 0.000 description 3
- 238000012549 training Methods 0.000 description 3
- 206010019468 Hemiplegia Diseases 0.000 description 2
- 208000032843 Hemorrhage Diseases 0.000 description 2
- 208000007542 Paresis Diseases 0.000 description 2
- 230000008878 coupling Effects 0.000 description 2
- 238000010168 coupling process Methods 0.000 description 2
- 238000005859 coupling reaction Methods 0.000 description 2
- 238000010586 diagram Methods 0.000 description 2
- 206010019465 hemiparesis Diseases 0.000 description 2
- 210000004394 hip joint Anatomy 0.000 description 2
- 230000002452 interceptive effect Effects 0.000 description 2
- 208000028867 ischemia Diseases 0.000 description 2
- 210000000629 knee joint Anatomy 0.000 description 2
- 230000003902 lesion Effects 0.000 description 2
- 238000012423 maintenance Methods 0.000 description 2
- 229910052751 metal Inorganic materials 0.000 description 2
- 239000002184 metal Substances 0.000 description 2
- 238000012544 monitoring process Methods 0.000 description 2
- 230000008447 perception Effects 0.000 description 2
- 239000004033 plastic Substances 0.000 description 2
- 238000011084 recovery Methods 0.000 description 2
- 210000000278 spinal cord Anatomy 0.000 description 2
- 230000001133 acceleration Effects 0.000 description 1
- 230000003213 activating effect Effects 0.000 description 1
- 230000006978 adaptation Effects 0.000 description 1
- 230000003044 adaptive effect Effects 0.000 description 1
- 230000000712 assembly Effects 0.000 description 1
- 238000000429 assembly Methods 0.000 description 1
- 230000000903 blocking effect Effects 0.000 description 1
- 244000309466 calf Species 0.000 description 1
- 230000002860 competitive effect Effects 0.000 description 1
- 238000011109 contamination Methods 0.000 description 1
- 238000001816 cooling Methods 0.000 description 1
- 230000003412 degenerative effect Effects 0.000 description 1
- 230000001419 dependent effect Effects 0.000 description 1
- 238000007599 discharging Methods 0.000 description 1
- 238000006073 displacement reaction Methods 0.000 description 1
- 239000003814 drug Substances 0.000 description 1
- 239000012530 fluid Substances 0.000 description 1
- 230000006870 function Effects 0.000 description 1
- 208000014674 injury Diseases 0.000 description 1
- 230000000670 limiting effect Effects 0.000 description 1
- 230000007246 mechanism Effects 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 230000005405 multipole Effects 0.000 description 1
- 230000004118 muscle contraction Effects 0.000 description 1
- 230000008555 neuronal activation Effects 0.000 description 1
- 238000011017 operating method Methods 0.000 description 1
- 230000010355 oscillation Effects 0.000 description 1
- 230000000737 periodic effect Effects 0.000 description 1
- 230000003252 repetitive effect Effects 0.000 description 1
- 238000011160 research Methods 0.000 description 1
- 230000004044 response Effects 0.000 description 1
- 238000001228 spectrum Methods 0.000 description 1
- 238000012360 testing method Methods 0.000 description 1
- 239000012815 thermoplastic material Substances 0.000 description 1
- 230000008733 trauma Effects 0.000 description 1
- 230000002618 waking effect Effects 0.000 description 1
Images



















Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61H—PHYSICAL THERAPY APPARATUS, e.g. DEVICES FOR LOCATING OR STIMULATING REFLEX POINTS IN THE BODY; ARTIFICIAL RESPIRATION; MASSAGE; BATHING DEVICES FOR SPECIAL THERAPEUTIC OR HYGIENIC PURPOSES OR SPECIFIC PARTS OF THE BODY
- A61H3/00—Appliances for aiding patients or disabled persons to walk about
- A61H3/008—Using suspension devices for supporting the body in an upright walking or standing position, e.g. harnesses
Definitions
- the present invention refers to an active orthosis for the motion neurological rehabilitation of lower limbs, to a system comprising such orthosis and to a process for operating such system.
- object of the present invention is solving the above prior art problems, by providing an active orthosis for motion neurological rehabilitation of the lower limbs, that allows treating clinical problems such as hemiplegia, tetraparesis, hemiparesis, comprising ictus, ischemia, brain haemorrhage, partial lesions of the spinal cord, with extension, in some cases, to muscle dystrophy and to motion degenerative pathologies.
- Such active orthosis is further useful in exercises and studies for motor learning that can also be applied on healthy individuals.
- the above described orthosis does not need the use of a treadmill, has a relatively simple, light-weight, compact, cheap and flexible construction, which can be easily controlled and used also by users with various types of motion difficulties.
- the versatility of the active orthosis of the invention allows it anyway to possibly work both in a traditional way, namely in suspension, and on the ground, with patient motion in a room and partial weight discharge.
- a further object of the present invention is providing a system comprising the above described orthosis, that, in addition to the advantages of the orthosis as described above, is equipped with a plurality of operating, maintenance, diagnostic and analysis functionalities, that make its application open to several solutions in the diagnostic, therapeutic, rehabilitation and research fields, both in medicine and in neurology.
- Another object of the present invention is providing a process for operating the above described system.
- the invention deals, first of all, with an active orthosis 1, preferably with electro-pneumatic drive, for the motion neurological rehabilitation of the lower limbs, wherein such orthosis 1 is equipped with at least four, and preferably six degrees of freedom for the movement respectively of the two hips, of the two knees and optionally of the two ankles of a patient 1'.
- the invention further deals with a system 3 for the motion neurological rehabilitation of lower limbs that therefore substantially comprises: at least one active orthosis 1 of the above mentioned type; at least one control box 5; and at least one computer (preferably a personal computer) 28 to acquire and process data, and manage the sitting by an operator.
- a system 3 for the motion neurological rehabilitation of lower limbs that therefore substantially comprises: at least one active orthosis 1 of the above mentioned type; at least one control box 5; and at least one computer (preferably a personal computer) 28 to acquire and process data, and manage the sitting by an operator.
- P.I.G.R.O Pneumatic Interactive Gait Rehabilitation Orthosis
- it is a bio-mechanical device with at least four, and preferably six, degrees of freedom, aimed to the robotized neurological rehabilitation of lower limbs in patients lacking mobility for cranial traumas, ictus or other.
- the first one is the movement of the ankle, a very important articulation very relevant in the walking process, even if normally not present in other devices, and the second one is the chance of performing different rehabilitation cycles in suspension or on the ground without treadmill.
- the gait cycle is performed with the patient 1' initially lifted from the ground through a winch (Body Weight Support or BWS) .
- BWS Body Weight Support
- Figure 2 shows all necessary elements for operating the system 3 according to the present invention. It is composed of a orthosis 1, adapted to support the patient 1' and actuated by pneumatic actuators controlled by solenoid valves, that contains, in the rear part of the structure, a control and interface box 22, with at least one supply duct 23 for compressed air and at least one electric connection cable 25, and a ground managing system 5, equipped with adequate means and with at least one computing machine.
- the compressed air supply comes from a compressor 24 with cable 29 or from a distribution network.
- a single duct 23 there is a single supply for the two legs; in case of many ducts, the supply can be separate for the two legs or according to the different pneumatic actuators.
- control cards connected to electronic interface drivers placed in a control box 26 also containing acquisition cards, through a serial cable or a fire wire or Ethernet or a wireless system. With them, feedback and commands are exchanged for the solenoid valves and the electric supplies between orthosis and ground managing system 5.
- the real time control can be made with commercial components assembled according to an innovative logic, that provides for one or more control cards on board the orthosis 1 in the box 22 and one or more cards in the control box 26.
- This allows using a single PC 28 of a traditional type connected to the control box 26 with a cable 27. It contains a control software, that can be used by a user through a suitable graphic interface.
- the PC is single, but is normally equipped with two monitors: the monitor 31 is dedicated to operator's needs, while the monitor 32 is the system biofeedback, useful both for the operator, and for the patient, for a self-diagnosis action during the rehabilitation sitting.
- the system is composed of a modular exoskeleton with six degrees of freedom with actuation of the hip, knee and ankle articulations, with movement chances mainly in the sagittal plane.
- the supply system allows moving two independent "legs” through actuators placed in acting-counteracting position, preferably of the pneumatic type, fastened to the structure, that guarantee a safe movement since they avoid forcing situations towards the patient 1' in case of muscle contraction, reduced costs, simple managing and controlling architecture.
- a distribution network for compressed air is necessary, generally present in all hospitals, in which the system 3 will preferably operate.
- pneumatic actuators preferred in the embodiment, the use of electric wires is avoided, together with all those safety problems associated therewith, and this is a more adaptive system to possible reactions produced by the patient.
- hydraulics actuators is less suitable, since contamination is not allowed in the medical environments due to possible fluid leakages from the system, and anyway they would not be particularly advantageous in terms of controllability.
- the two legs are joined at the pelvis height through a read handle 92 that can be adjusted in its width, that prevents their relative rotation and allows placing a box 22 containing the valve assembly for supply and the pneumatic cylinders exhaust, a distribution plate for compressed air and the control card to which input and output signals are connected between orthosis 1 and ground managing system 5.
- the distribution plate contains two supply channels that connect the inputs of the valves controlling the right or left leg, separately. There are therefore two pressure reducers in the control box 26, to have the chance of independently adjusting the pressure in the two legs. Therefore, there are two supply tubes between control box 26 and box 22. Outputs of all exhaust valves are instead conveyed inside the box 22, allowing to attenuate noise and local cooling.
- the supply valves are digital, normally closed 2/2 solenoid valves, controlled by a Pulse Width Modulation, PWM system, that allows obtaining a flow-rate with variable behaviour when the cycle changes.
- the exhaust valves are of the normally open 2/2 type. In this way,, in an emergency, the actuators are getting exhausted and the patient, though still dressing the orthosis 1, is free of moving the lower limbs according to current needs.
- one or more normally closed solenoid valves for supply, and one or more normally open solenoid valves for exhaust can be used.
- both the legs, and the rear handle are made through means, composed for example of elements that are able to slide one over the others, with possible locking in the desired position, in order to change the length of the femur and tibia segments depending on the anthropometrical sizes of the patient 1'.
- the possible adjustments determine:
- the anthropometrical sizes depend on several factors, among which sex, age and geographic provenience.
- the adjustable devices (blades and sliders) of the orthosis legs comprise elements (blades) made of harmonic steel. This allows a good suitability to different anatomic shapes of different patients, and possible pelvis motions even on the front plane.
- the interface with the patient 1' occurs with a corset, that can be opened to insert the patient and can be closed with fastening elements, that can be made of plastic or semi-rigid material with textile solutions, and fastened to the rear handle.
- the corset is equipped on the front part with many hinges, of the same number on each side, to allow its opening and enable the patient 1' to easily wear it. After that, the corset will be tightened to the waist of the patient 1', allowing him to keep an erect position.
- many corsets are provided, for example for men and women, and/or with different sizes. It is also provided to use a semi-rigid corset with textile base.
- showers In order to fasten the lower limbs to the structure, "showers" are provided, the showers being an orthopaedic term used to designate a channel obtained to contain and immobilize a limb. Characteristic of these showers is being open to allow inserting the limb and comprising means for locking the limb.
- the number of showers, their shape and their type of closure can change according to the embodiments. In an embodiment, here provided for, there are two showers at the thigh height, one shower for the tibia segment and finally another shower for the foot.
- the showers can be made of elastic steel or thermoplastic material.
- VelcroTM-type strips can be used, that perform a partial adaptation to the physical features of the patient 1', or textile structures that can be closed.
- control architecture of the system according to the present invention is with closed loop.
- curves related to gait cycle are provided, obtained from literature and suitably modified, according to medical indications, being the rehabilitation in suspension and reactions with the ground being therefore null, or for other therapeutic purposes.
- control type various types of controllers can be used, both of the PID (Proportional Integral Derivative) type, and of the Fuzzy type or others.
- PID Proportional Integral Derivative
- the PWM modifies the cycle amplitude following an error, and controls the related solenoid valves for actuating the pneumatic cylinders.
- any cylinder chamber there are also pressure transducers, necessary for evaluating the pressure behaviours therein and therefore the developed force, useful in some diagnostic steps.
- the rehabilitation steps with the system according to the present invention provide, for the severest patients 1', a suspension path as described above, where the patient 1' is totally guided by the exoskeleton.
- the following steps always however in suspension, it is possible to increase the working load, reducing the pressure supplied to the pneumatic actuators, so that the user actively contributes to the movement.
- the patient 1' will then be able to walk on the ground, with partial weight discharge, and with hip and knee articulations always actuated by the system according to the present invention.
- the reference limb for building the first leg is the right side, and reference will be made only to this side, since the left side is a mirror image thereof.
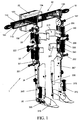
- Figure 3 seen from outside, shows the final result, and the following can be distinguished, starting from the top and going downwards: joint 31' for hip articulation, femur segment 32', knee articulation 33', tibia segment 34 and ankle join 35.
- the joint 31' is composed of several elements, designed as to minimize frictions and encumbrances. It is composed of an external element 141 fastened through the two holes, placed in the upper part, to the rear handle 92, that prevents it from rotating. In the internal part, it is equipped with a hub, on which a bush 142 will be keyed-in, and a series of element alternating with wear-preventing rings 143, 144, 147, preferably made of nylon or turcite, to avoid metal-to-metal contacts.
- the component 201 is the femur slider hinge, parallel to the human limb, and is the one on which the pneumatic cylinders 160 will be placed, that rotate it with respect to the joint 31'.
- joints for hip 31' and knee 33 have been made very similar.
- a bush 145 is placed in the hip and serves exclusively as shim.
- a plate 148 and a small internal plate 149 are placed, that allow closing the joint 31' with two screws 150 with flared head.
- Figure 15 shows the external side of the element 31', in which there are two threaded holes, symmetrical with respect to the vertical, suitable to position two pins 152 necessary for placing the stems 159 of the cylinders 160.
- the end of the stems 159 is threaded, allowing their fastening to standard ball joints 154, to have a rotation and oscillation movement lacking friction and without play.
- the axial constraint is guaranteed on one side by a bush 153, and on the other side by a Seeger ring 155 placed in a suitable groove obtained on the pin 152.
- a threaded pin 156 is placed, fastened to the element 31', and necessary as support for a protection carter, placed between spacer 157 and knob 158.
- the protection carter is wound around the whole exoskeleton, allowing the operator to adjust the distances between the joints, exclusively operating on the knobs without interacting with the actuation and control systems of the system 3 according to the present invention.
- Figure 16 shows a global view pertaining to the placement of the pneumatic cylinders 160 on the joint 31' of the hip (on the left) and the ball joint at the end of the stem of the cylinder 160 (on the right).
- the pneumatic cylinders 160 are constrained at their lower end by exploiting the presence of holes that are diametrically opposite to the surface of the cylinder 160 chamber ( Figure 20 ). Assembling consists in inserting a suitably shaped pin 206 inside the seat of the femur slider 201 on one side, and inside the liner 202 of the cylinder 160 on the other side. The pin 206 axially constrains the cylinder 160, but must allow a rotation related to the pin 206 itself.
- a second pin 205 geometrically identical to the previous pin 206, is placed on the opposite side of the cylinder 160 and, after having repeated the same operations also for the other cylinder 160, a connecting bracket 203 is placed, fastened to the femur slider 201 with a system with screw 207 - self-locking nut 204.
- Function of the lower screw 207 is also placing a nylon spacer 208 necessary for fastening a thigh shower 210 through riveting ( Figure 21 ).
- the central hole placed on the shower allows passing the screw suitable for fastening the assembly to the femur blade.
- the stroke of the cylinders 160 is sized depending on the limit angular excursion of the articulation, set by the physiological gait, and the compliance with these constraints is mechanically guaranteed when at least one plunger of the two cylinders 160 is at the end of its stroke.
- Figures 17, 18 and 19 respectively show the configuration at rest, the extension step and the flexion step. Not knowing the actual internal sizes of the cylinders 160, modelling therein is only qualitative. Arrows A designate the supply to the cylinders 160, whole arrows B the exhaust.
- the femur slider 201 (also called femur blade) is made slide inside a femur guide 228.
- the femur blade or slider 201 is made of harmonic steel, which allows the structure to flex also outside the sagittal plane, giving the patient 1' a less rigid movement, while for the guide, having bigger sizes, aluminium has been employed to assign a certain lightness thereto.
- a third element is interposed, fastened to the guide, and made of turcite, which guarantees low friction, reduced wear and long life.
- the relative motion between femur slider 201 and its guide is shown in Figure 22 .
- Locking of the femur segment in a certain position occurs by friction, namely by tightening the various components through a knob 227.
- the nylon spacer 222 of Figure 22 necessary for fastening a thigh shower 210, is equipped with two square breakings, as well as the guide, suitable to house two screws 221, with crowned head and square sub-head, preventing their rotation.
- a bracket 224 is placed in contact with the femur slider 201 and axially constrained by Seeger rings 225.
- a covering ring 226 is inserted outside the screw, obtaining the configuration shown in Figure 23 .
- femur blade In the femur blade there is a slit which allows it to slide without interfering with the tightening screws, and which prevents its disassembling.
- the screws further provide a limit switch for the adjustment size ends included between 10%ile for women and 95%ile for men.
- Both on the femur guide 228 and on the bracket 224 two holes are obtained for placing the pneumatic cylinders 242 necessary for actuating the knee articulation.
- the arrangement is similar to the one described for the hip ( Figure 24 ), as well as fastening a second thigh shower 241 onto the spacer with riveting.
- the knee articulation is different with respect to the hip articulation only due to two components that are shown in Figure 25 . More precisely, the femur guide 228 replaces the femur slider 201 and the part 145 of Figure 14 , and the external element 254 replaces the previous one (part 141 of Figure 14 ) operating as guide also for the tibia segment.
- the element 254 is equipped with two holes for placing pins that support the stems of the cylinders 242, arranged rotated by 30° with respect to a plane perpendicular to the vertical, to allow only a 60° flexure allowed for the knee articulation.
- the two pneumatic cylinders 242 have connections with crossed chambers and operate in an acting-counteracting way.
- Figure 28 and Figure 29 show the rest configuration ( Figure 28 ) with the femur segment aligned with the tibia segment, and the flexure condition ( Figure 29 ).
- Arrows C designate the supply of cylinders 242, while arrows D designate the exhaust.
- the tibia segment ( Figure 26 ) is simpler with respect to the femur segment, and is composed of the aluminium guide 261 on which an element 262 made of turcite is overlapped with a similar geometry of its seat.
- the tibia blade 265 made of harmonic steel is placed thereon, and is able to slide if adjustments of the tibia length must be made. The relative sliding between the two elements is blocked by friction with the screw-nut screw type tightening.
- Two screws 269 are provided, with crowned head and square sub-head, that also allow fastening the tibia shower to the guide, by interposing a suitable spacer 266 and using two knobs 264.
- the screw 268 with know 263 is inserted.
- a single actuator is used, having reduced sizes with respect to the previous ones, both because the loads to be supported are lower, and due to encumbrance problems.
- the actuator is supported by a bracket 273, fastened to the tibia blade 265 with screws 274 with cylindrical head and hexagonal recess and related nut, and is placed in the front part of the structure, differently from previous cylinders 275 that are laterally placed.
- the actuator is fastened to the bracket by means of two diametrically opposite screws 272.
- the ankle articulation ( Figure 30 ) is composed of an aluminium plate 308 that is the foot flank, and on whose front end a pin 309 will be fastened for keying-in the cylinder 275 stem.
- the element 308 is equipped with a hub, on which a friction-preventing ring 305 is placed, which, in turn, supports the tibia blade 304, a shim element 306 and, at the two ends, a friction-preventing ring 303, 307, preferably made of nylon, to avoid the metal-to-metal contact. Closure of the joint occurs with a small external plate 302 and two screws 301 with flared head.
- the shower 310 is fastened for positioning the patient 1's foot.
- two spacers 312 with different thickness are arranged, to then place the shower 310 fastened to the structure with two screws 311 with crowned head and square sub-head, and nut. This type of screw avoids its rotation and is not uncomfortable for the patient 1'.
- a threaded pin 313 is placed for housing the ball joint together with the stem of the cylinder 275. The axial displacement is prevented by a Seeger ring.
- the angular excursion of the ankle has been increased with respect to the one of the physiological walk upon medical request, for reasons linked to waking in suspension.
- Figure 32 shows, from left to right, the rest configuration, the plantar flexure and the dorsal flexure steps.
- Arrows E designate the cylinders supply while arrows F designate the exhaust.
- supplementary support means such as a connecting rod between foot shower and tibia shower ( Figure 33 ).
- the handle 92 can be built according to various embodiments, a first one of which is shown in Figure 8 .
- the handle is composed of two forks 81 placed at its ends, which allow fastening the exoskeleton at the height of the hip articulation.
- the pelvis width can be adjusted (manually or through an electric or pneumatic motor) by sliding two concentric tubular elements 82, 84. The presence of a slit on the element 84 and a pin fastened inside the structure on a plate, prevents the relative rotation between the two elements.
- the rectilinear section above the knob 83 is used for fastening the box 22 containing the valve assembly and the distribution plate for compressed air.
- the small external plate 31' is placed, for the hip articulation, and a plate (not shown) necessary for fastening the corset 210; everything is tightened with two through-screws with unscrewing-preventing nuts.
- the corset 210 is fastened to the structure by three screws, with their head oriented towards its internal part, and with self-locking nuts at the opposite end.
- a nylon spacer is also inserted, that allows coupling the curved shape of the corset 210 with the plane bracket surface.
- the rear handle 92 as shown in Figures 9 to 12 , first of all comprises two handles 91.
- Figure 9 shows a global view of this element. In order to adapt it to a greater number of patients, a minimum adjusting distance is imposed, equal to 300 mm, with a maximum distance of 650 mm. It is composed of a suitable shaped central block 112, inside which an electric motor 94 and a reducer 95 are placed. The rotation motion is transmitted to a worm screw with double slant through a toothed belt, or a pair of toothed wheels.
- Figure 11 schematically shows the kinematism with motor 94, reducer 95 and worm screw 96.
- two bearings are placed for keying-in therein the worm screw 96, together with other two bearings, placed at the ends of the worm screw 96 and constrained on plates 103 for closing the handle 92.
- these are radial bearings, respectively designated with 101 and 102 in Figure 10 .
- two guides 105, 106 with circular cross-section are placed and fastened to the structure, while two suitably shaped small plates 104 are externally placed as protection.
- Figure 12 shows more in detail the small block with the presence of four bushings 121, two on each part, for housing the guides, while in the front part, a tubular segment 123 is placed, fastened through two biting screws 122 with cylindrical head.
- a slit is obtained in the small block to make it easier to insert the cylindrical outline, while the screws allow approaching the two small block edges, generating a tightening.
- Figure 13 shows a series of elements that are connected at the opposite end of the tubular segment 123.
- the first one of them is the fork 132, inside which the small external plate 133 of the hip articulation 31' is placed, and from which the whole leg departs, and a bracket 134. Everything is tightened by two screws with flared head and self-locking nuts 139.
- a female dovetail 135 is fastened to the bracket 134 with other two screws with flared head and nuts 137, while inside it the respective male dovetail 136 is made slide with a suitably slanted surface, since it will have to follow the curved geometry of the corset 210 supporting it.
- the element 136 is supported in the lower part by a plate 138 fastened to the female dovetail with three biting screws.
- the active orthosis 1 of the present invention is used for the motion neurological rehabilitation of lower limbs, and it is equipped with at least four, and preferably six, degrees of freedom for a movement respectively of the two hips, of the two knees and optionally of the two ankles of a patient 1' without having to use supporting and handling treadmills;
- the orthosis 1 comprising:
- the elongated supporting structure 92 is so rigid as to allow the first, second and third supporting and handling structures 201, 160; 228, 242, 261; 265, 275 to perform mutually related movements, the elongated supporting structure 92 being also adjustable to be suited to sizes of the patient 1' when the patient 1' wears and uses the orthosis 1.
- the orthosis 1 is adapted to be used both in a suspended condition, and in a condition where the weight of the patient 1' is partially supported, and on the ground.
- the first supporting and handling structure 201, 160 can comprise, for every lower limb of the patient 1', first supporting means 201 operatively coupled with first handling means 160 of the femur of the patient 1', where the first supporting means 201 are rotatingly connected to the supporting structure 92 through at least one first junction element 31'; the first supporting means 201 are made of a flexible material along a plane passing through the axis of the first junction element 31', the first handling means (160) being of the acting/counteracting type and allowing a handling of the femur exclusively in the sagittal plane.
- the second supporting and handling structure 228, 242, 261 can comprise, for every lower limb of the patient 1', second supporting means 228, second handling means 242 and third supporting means 261, where the second supporting means 228 are operatively coupled, in a sliding and adjustable way, with the first supporting means 201, and are operatively coupled with the second handling means 242 of at least one tibia of the patient 1'; the second supporting means 228 are rotatingly connected to the third supporting means 261 through at least one second junction element 33', the second handling means 242 being of the acting/counteracting type and allowing a handling of the tibia exclusively in the sagittal plane.
- the third supporting and handling structure 265, 275 can comprise, for every lower limb of the patient 1', fourth supporting means 265 and third handling means 275, the fourth supporting means 265 being operatively coupled, in a sliding and adjustable way, with the third supporting means 261, and being operatively coupled with the third handling means 275 of at least one foot of the patient 1'; the fourth supporting means 265 are rotatingly connected to means 310 for abutting and supporting the foot through at least one third junction element 35; and the fourth supporting means 265 are made of a flexible material along a plane passing through the axis of the second junction element 33', the third handling means 275 being of the acting/counteracting type and allowing a handling of the foot exclusively in the sagittal plane, the fourth supporting means 265 being adapted to be operatively connected to and disconnected from the third supporting means 261.
- the first supporting means 201 and the fourth supporting means 265 can be sliders made of plates of harmonic steel, while the second supporting means 228 and the third supporting means 261 can be metallic guides.
- the first supporting and handling structure 201, 160 can comprise, for every lower limb of the patient 1', first supporting means 201 operatively coupled with first handling means 160 of the femur of the patient 1', the first supporting means 201 being rotatingly connected to the supporting structure 92 through at least one first junction element 31'; the first supporting means 201 are of the acting/counteracting type and allow a handling of the femur exclusively in the sagittal plane.
- the second supporting and handling structure 228, 242, 261 can comprise, for every lower limb of the patient 1', second supporting means 228, second handling means 242 and third supporting means 261, the second supporting means 228 being made of a flexible material on a plane passing through the axis of the first junction element 31', the second supporting means 228 being operatively coupled, in a sliding and adjustable way, with the first supporting means 201, and being operatively coupled with the second handling means 242 of at least one tibia of the patient 1', the second supporting means 228 being rotatingly connected to the third supporting means 261 through at least one second junction element 33', the third supporting means 261 being made of a flexible material along a plane passing through the axis of the second junction element 33', the second handling means 242 being of the acting / counteracting type and allowing a handling of the tibia exclusively in the sagittal plane.
- the third supporting and handling structure 265, 275 can comprise, for every lower limb of the patient 1', fourth supporting means 265 and third handling means 275, the fourth supporting means 265 being operatively coupled, in a sliding and adjustable way, with the third supporting means 261, and being operatively coupled with the third handling means 275 of at least one foot of the patient 1', the fourth supporting means 265 being rotatingly connected to means 310 for abutting and supporting the foot through at least one third junction element 35, the third handling means 275 being of the acting/counteracting type and allowing a handling of the foot exclusively in the sagittal plane, the fourth supporting means 265 being adapted to be operatively connected to and disconnected from the third supporting means 261.
- the first supporting means 201 and the fourth supporting means 265 can be metallic guides, while the second supporting means 228 and the third supporting means 261 can be sliders made of plates of harmonic steel.
- the first and the second handling means 160, 242 are preferably composed, on every lower limb, of pairs of pneumatic cylinders with crossed chambers and the third handling means 275 are composed, on any lower limb, preferably of a pneumatic cylinder, or the first, second and third handling means 160, 242, 275 can be composed of electric or hydraulic actuators.
- the first supporting means 201 and the third supporting means 261 are sliders made of harmonic steel plates, and the second supporting means 228 and the fourth supporting means 265 are metallic guides; or in which the second supporting means 228 and the fourth supporting means 265 are sliders made of harmonic steel plates, and the first supporting means 201 and the third supporting means 261 are metallic guides.
- the orthosis 1 of the invention in its preferred embodiment, is composed of five main groups: the first group is composed of the supporting structure 92 and the first supporting and handling structure 201, 160; the second and the third group are composed of the second supporting and handling structure 228, 242, 261, one for each of the lower limbs of the patient 1'; and the fourth and the fifth group are composed of the third supporting and handling structure 265, 275, one for each of the lower limbs of the patient 1'.
- This configuration with five groups could obviously be reduced to a configuration with less than five groups, by operatively and/or physically disconnecting those groups that currently are not useful for the patient and/or the therapy actually affected.
- the active orthosis 1 consists in a modular supporting structure, with four or six degrees of freedom, adjustable, for example, from the 10%ile of women to the 95%ile of men, according to the anthropometrical sizes of the patient 1', preferably with a pneumatic actuation (the actuation could also be electric or hydraulic), closed into suitable safety carters and constrained to the basic structure.
- an original system (alternatively also called machine herein below) has been obtained, not only able to be adapted to different physiological shapes, but above all a machine that allows, when walking on the ground, a certain pelvis mobility even outside the sagittal plane. In this way, the path imposed to the patient 1' during his therapeutic sitting is more natural and the treatment efficiency improves.
- the system according to the present invention can be made operate both in suspension, and on the ground, with partial or total discharge, or not, of the weight of the patient 1', according to therapeutic needs.
- BWS Body Weight Support
- ankle activation in the examined orthosis 1 can also be removed, leaving the patient 1' free of autonomously moving his foot when walking on the ground, if this is required.
- the pelvis width equipped with a corset 210 constrained to the back of the patient 1' due to fastening VelcroTM bands, can be modified due to the sliding and automated rear handle 92 to which the corset 210 is fastened. Purpose of the handle 92 is also keeping joined the two legs of the orthosis 1, making it easier for the patient 1' to wear it.
- the interface with the patient 1' is obtained through thigh members and showers closed with VelcroTM bands or textile elements.
- the femur and tibia actuating assemblies consists in pairs of pneumatic cylinders with crossed chambers, that operate by simulating the principle of an acting and counteracting muscle, not pointed out in other patents. Such assembly allows using two actuators with smaller sizes with respect to solutions with a single motor.
- the cylinders of the system according to the present invention are fastened on the slider part that s integral with the articulation, and are covered by protecting carters in order to close every moving part: from these, only the knobs project that are necessary for the anthropometrical adjustment.
- Every leg of the orthosis 1 is equipped with pressure sensors for detecting the pressure in the cylinder chambers and with position sensors, to detect the motion of the various articulations and use it as feedback in the control that manages the system.
- the orthosis 1 is then equipped with a control box 22, placed behind the patient back, where the control solenoid valves and the electronic cards are placed, that are able to perform, on board the machine, a real time check, sending acquired data to a PC through a wire for transmitting coded signals, or with multi-pole cables or with wireless connections.
- ROM The Range Of Movement
- the system ROMs according to the present invention are included in Table 1, not exclusively.
- the anthropometrical adjustments allowed in the examined orthosis 1 are wide and are included in Table 2, not exclusively.
- Table 2 Anthropometrical adjustments allowed in the system according to the present invention 10%ile woman [mm] 95%ile man [mm] Adjustment Range [mm] Pelvis length 300 650 350 Femur length 370 500 130 Tibia length 360 500 140
- the ground managing system 5 comprises: at least one card for managing the orthosis - PC connections; an electro-pneumatic control circuit; emergency systems: a preferred embodiment of such components is shown in Figure 34 .
- an emergency for the patient 1' that therefore, if able, can stop the sitting in case of need; a manual emergency and an emergency from software for the operator. All these actions force to go out of the software and to start again the sitting, saving it or not.
- a peculiarity of the system is then the presence, in the control box 26, of two electronic pressure regulators, which allow independently adjusting from software, the pressure in the legs of the orthosis 1.
- This innovative aspect is extremely useful in case of treatments of hemiplegia, tetraparesis, hemiparesis, since it could be necessary to apply different activation forces to the two legs.
- the pressure regulation in the actuators further allows changing the force that the orthosis 1 exerts on the legs of the patient 1' , thereby varying the man-machine interaction, since the more the pressure is reduced, the more the thrust to the legs lowers and the patient 1' must demonstrate to be able to autonomously work.
- the computer 28 instead comprises the managing software and is connected to two monitors.
- the managing software instead, allows controlling in position the imposed motion, using as input the behaviours (physiological or not, even asymmetrical on the two legs, according to needs) of the angles of the various articulations, depending on the gait cycle, according to a follower logic.
- the system is equipped with a suitable graphic interface, which allows the operator to quickly and flexibly use the device, in addition to analysis and data saving for every sitting.
- the inventive system Given its wide potentialities in taking care of different pathologies, such as ictus, ischemia, brain haemorrhage, partial lesions of the spinal cord, with extension, in some cases, to muscle dystrophy and motion degenerating pathologies, in addition to motor learning studies both on healthy and on disabled people, the inventive system has many innovative technical features.
Claims (16)
- Aktivbandage (1) für die motorische Neurorehabilitation der Beine, die Bandage (1) ist mit mindestens vier, vorzugsweise sechs, Freiheitsgraden für die Bewegung der Hüften, der Knie und wahlweise der Knöchel eines Patienten (1') ausgestattet, ohne unterstützende und sich bewegende Laufbänder zu verwenden, die Bandage (1) enthält:- eine längliche Stützstruktur (92);- eine erste Stütz- und Bewegungsstruktur (201, 160) auf der Sagittalebene des Oberschenkels des genannten Patienten (1');- eine zweite Stütz- und Bewegungsstruktur (228, 242, 261) auf der Sagittalebene von mindestens einem Schienbein im Verhältnis zum Oberschenkel des Patienten (1'); und- eine dritte Stütz- und Bewegungsstruktur (265, 275) auf der Sagittalebene von mindestens einem Fuß im Verhältnis zum Schienbein des Patienten (1'), die dritte Stütz- und Bewegungsstruktur (265, 275) dient dazu, für den Einsatz mit der Bandage (1) verbunden bzw. von ihr getrennt zu werden;und ist dadurch gekennzeichnet, dass:- die längliche Stützstruktur (92) so fest ist, dass sie der genannten ersten, zweiten und dritten Stütz- und Bewegungsstruktur (201, 160; 228, 242, 261; 265, 275) die Ausführung der jeweiligen Bewegungen untereinander ermöglicht, die längliche Stützstruktur (92) kann außerdem verstellt werden, um sich den Maßen des Patienten (1') anzupassen, wenn er die Bandage (1) trägt und verwendet, die längliche Stützstruktur (92) enthält:* einen zentralen Block, in dessen Inneren ein Elektromotor (94), ein Untersetzungsgetriebe (95) und eine Endlosschraube (96) angebracht sind, die Rotationsbewegung des Elektromotors (94) wird durch eine Endlosschraube (96, 113) übertragen;* zwei Schienen (112, 114), die zwei Schraubenmutterblöcke (111) enthalten, die jeweils mit einem Rohrsegment (123) verbunden sind, das für den Einsatz mit der ersten Stütz- und Bewegungsstruktur (201, 160) verbunden ist und diese je nach der Rotationsrichtung des Motors (94) stützt und daher der Endlosschraube (96, 113), es wird eine Verschiebung für die beiden Schraubenmutterblöcke (111) erzeugt, wenn sie sich einander nähern und sich voneinander entfernen, wobei die Länge des Beckens je nach den Eigenschaften des Patienten (1') geändert wird, die beiden Schraubenmutterblöcke (111) werden zusätzlich zu der Verbindung mit der Schraubenmutter (96, 113) von den beiden Schienen (105, 106) in Position gehalten;- Die erste Stütz- und Bewegungsstruktur (201, 160) enthält für jedes Bein des Patienten (1') erste Stützmittel (201), die für den Einsatz mit den ersten Bewegungsmitteln (160) der Hüfte des Patienten (1') verbunden sind, die ersten Stützmittel (201) sind rotierend mit der Stützstruktur (92) durch mindestens ein erstes Verbindungselement (31') verbunden, die ersten Stützmittel (201) sind aus biegsamem Material auf einer die Achse des ersten Verbindungselements (31') durchgehenden Ebene hergestellt, die ersten Bewegungsmittel (160) sind agonistisch/antagonistisch und ermöglichen die Bewegung der Hüfte ausschließlich auf der Sagittalebene, die ersten Stützmittel (201) sind mit Blechen aus harmonischem Stahl hergestellte Gleitschienen; und- die Bandage (1) dient dazu, sowohl in einem hängenden Zustand als auch in einem Zustand, wo eine teilweise Entlastung des Gewichts des Patienten (1) erfolgt, sowie auch am Boden verwendet zu werden.
- Bandage (1) gemäß Patentanspruch 1, die dadurch gekennzeichnet ist, dass die zweite Stütz- und Bewegungsstruktur (228, 242, 261) für jedes Bein des genannten Patienten (1') zweite Stützmittel (228), zweite Bewegungsmittel (242) und dritte Stützmittel (261) enthält, die zweiten Stützmittel (228) sind für den Einsatz gleitend und verstellbar mit den ersten Stützmitteln (201) verbunden, und sie sind für den Einsatz mit den zweiten Bewegungsmitteln (242) von mindestens einem Schienbein des Patienten (1') verbunden, die zweiten Stützmittel (228) sind rotierend mit den dritten Stützmitteln (261) durch mindestens ein zweites Verbindungselement (33') verbunden, die zweiten Bewegungsmittel (242) sind agonistisch/antagonistisch und ermöglichen die Bewegung des Schienbeins ausschließlich auf der Sagittalebene.
- Bandage (1) gemäß Patentanspruch 2, die dadurch gekennzeichnet ist, dass die dritte Stütz- und Bewegungsstruktur (265, 275) für jedes Bein des Patienten (1') vierte Stützmittel (265) und dritte Bewegungsmittel (275) enthält, die vierten Stützmittel (265) sind für den Einsatz gleitend und verstellbar mit den dritten Stützmitteln (261) verbunden, und sie sind für den Einsatz mit den dritten Bewegungsmitteln (275) von mindestens einem Fuß des Patienten (1') verbunden, die vierten Stützmittel (265) sind rotierend mit Auflage- und Stützmitteln (310) des Fußes durch mindestens ein drittes Verbindungselement (35) verbunden, die vierten Stützmittel (265) sind aus biegsamem Material auf einer die Achse des zweiten Verbindungselements (33') durchgehenden Ebene hergestellt, die dritten Bewegungsmittel (275) sind agonistisch/antagonistisch und ermöglichen die Bewegung des Fußes ausschließlich auf der Sagittalebene, die vierten Stützmittel (265) dienen dazu, für den Einsatz mit den dritten Stützmitteln (261) verbunden bzw. von diesen getrennt zu werden.
- Bandage (1) gemäß Patentanspruch 1, 2 oder 3, die dadurch gekennzeichnet ist, dass die genannten vierten Stützmittel (265) aus Blechen aus harmonischem Stahl hergestellte Gleitschienen sind, während die zweiten Stützmittel (228) und die dritten Stützmittel (261) Metallschienen sind
- Bandage (1) gemäß Patentanspruch 1, die dadurch gekennzeichnet ist, dass die erste Stütz- und Bewegungsstruktur (201, 160) für jedes Bein des genannten Patienten (1') erste Stützmittel (201) enthält, die für den Einsatz mit den ersten Bewegungsmitteln (160) des Oberschenkels des Patienten (1') verbunden sind, die ersten Stützmittel (201) sind rotierend mit der Stützstruktur (92) durch mindestens ein erstes Verbindungselement (31') verbunden, die ersten Bewegungsmittel (160) sind agonistisch/antagonistisch und ermöglichen die Bewegung des Oberschenkels ausschließlich auf der Sagittalebene.
- Bandage (1) gemäß Patentanspruch 5, die dadurch gekennzeichnet ist, dass die zweite Stütz- und Bewegungsstruktur (228, 242, 261) für jedes Bein des genannten Patienten (1') zweite Stützmittel (228), zweite Bewegungsmittel (242) und dritte Stützmittel (261) enthält, die zweiten Stützmittel (228) sind aus biegsamem Material auf einer die Achse des ersten Verbindungselements (31') durchgehenden Ebene hergestellt, die zweiten Stützmittel (228) sind für den Einsatz gleitend und verstellbar mit den ersten Stützmitteln (201) verbunden, und sie sind für den Einsatz mit den zweiten Bewegungsmitteln (242) von mindestens einem Schienbein des Patienten (1') verbunden, die zweiten Stützmittel (228) sind rotierend mit den dritten Stützmitteln (261) durch mindestens ein zweites Verbindungselement (33') verbunden, die dritten Stützmittel (261) sind aus biegsamem Material auf einer die Achse des zweiten Verbindungselements (33') durchgehenden Ebene hergestellt, die zweiten Bewegungsmittel (242) sind agonistisch/antagonistisch und ermöglichen die Bewegung des Schienbeins ausschließlich auf der Sagittalebene.
- Bandage (1) gemäß Patentanspruch 6, die dadurch gekennzeichnet ist, dass die dritte Stütz- und Bewegungsstruktur (265, 275) für jedes Bein des Patienten (1') vierte Stützmittel (265) und dritte Bewegungsmittel (275) enthält, die vierten Stützmittel (265) sind für den Einsatz gleitend und verstellbar mit den dritten Stützmitteln (261) verbunden, und sie sind für den Einsatz mit den dritten Bewegungsmitteln (275) von mindestens einem Fuß des Patienten (1') verbunden, die vierten Stützmittel (265) sind rotierend mit Auflage- und Stützmitteln (310) des Fußes durch mindestens ein drittes Verbindungselement (35) verbunden, die dritten Bewegungsmittel (275) sind agonistisch/antagonistisch und ermöglichen die Bewegung des Fußes ausschließlich auf der Sagittalebene, die vierten Stützmittel (265) dienen dazu, für den Einsatz mit den dritten Stützmitteln (261) verbunden bzw. von diesen getrennt zu werden.
- Bandage (1) gemäß Patentanspruch 5, 6 oder 7, die dadurch gekennzeichnet ist, dass die ersten Stützmittel (201) und die vierten Stützmittel (265) Metallschienen sind, während die zweiten Stützmittel (228) und die dritten Stützmittel (261) mit Blechen aus harmonischem Stahl hergestellte Gleitschienen sind.
- Bandage (1) gemäß einem beliebigen der Patentansprüche von 1 bis 8, die dadurch gekennzeichnet ist, dass die ersten und zweiten Bewegungsmittel (160, 242) an jedem Bein aus pneumatischen Zylinderpaaren mit überkreuzten Kammern bestehen und dass die dritten Bewegungsmittel (275) an jedem Bein aus einem pneumatischen Zylinder mit überkreuzten Kammern bestehen.
- Bandage (1) gemäß einem beliebigen der Patentansprüche von 1 bis 8, die dadurch gekennzeichnet ist, dass die ersten, zweiten und dritten Bewegungsmittel (160, 242, 275) aus elektrischen oder hydraulischen Antrieben bestehen.
- Bandage (1) gemäß einem beliebigen der vorhergehenden Patentansprüche, die dadurch gekennzeichnet ist, dass jedes Bein der Bandage (1) mit Drucksensoren für die Feststellung des Drucks in den Kammern der Zylinder und mit Positionssensoren für die Feststellung der Bewegung der verschiedenen Gliedmaße ausgestattet ist, um sie als Feedback für die Verwaltungskontrolle der Bandage (1) zu verwenden.
- Bandage (1) gemäß einem beliebigen der vorhergehenden Patentansprüche, die dadurch gekennzeichnet ist, dass sie außerdem mit mindestens einem Steuer- und Schnittstellengehäuse (22) ausgestattet ist, in dem die Magnetsteuerventile und die elektronischen Steuerkarten untergebracht sind, die auf der Bandage (1) eine Echtzeitkontrolle mit Sendung der erfassten Daten an einen Verwaltungscomputer ausführen können.
- System (3) für die motorische Neurorehabilitation der Beine, das Folgendes enthält:- mindestens eine Bandage (1) gemäß einem beliebigen der vorhergehenden Patentansprüche; und- mindestens ein Bodenverwaltungssystem (5), das mindestens einen Computer (28) für die Erfassung und Bearbeitung der Daten und für die Verwaltung einer motorischen Neurorehabilitationssitzung seitens eines Arztes enthält.
- System (3) gemäß Patentanspruch 13, das dadurch gekennzeichnet ist, dass:- das Steuer- und Schnittstellengehäuse (22) mit mindestens einer Druckluftversorgungsleitung (23) und mindestens einem Verbindungsstromkabel (25) ausgestattet ist, die Druckluftversorgung sieht mindestens einen Verdichter (24) oder ein Verteilungsnetz vor;- im Steuer- und Schnittstellengehäuse (22) ggf. auch Steuerkarten vorhanden sind, die mit dem Driver der elektronischen Schnittstelle verbunden sind und in einer Kontrollbox (26) des Bodenverwaltungssystems (5) angebracht sind, welches auch die Erfassungssteuerkarten enthält, mit denen es Feedback-Signale und Steuerungen für die Magnetventile und die Stromversorgungen zwischen der Bandage (1) und dem Bodenverwaltungssystem (5) austauscht; und- dadurch, dass der Computer (28) mit der Kontrollbox (26) verbunden ist und eine Kontrollsoftware enthält, die vom Benutzer durch eine entsprechende Grafikschnittstelle verwendet werden kann, der Computer (28) ist normalerweise mit zwei Monitoren ausgestattet, ein erster Monitor (31) ist für die Anforderungen des Bedieners bestimmt, und ein zweiter Monitor (32) stellt das Biofeedback des Systems dar, was sowohl für den Bediener als auch für den Patienten während der Rehabilitationssitzung für eine Selbstdiagnosestellung nützlich ist.
- System (3) gemäß Patentanspruch 13 oder 14, das dadurch gekennzeichnet ist, dass es mit drei Not-Aus-Schaltern ausgestattet ist: Ein Not-Aus-Schalter ermöglicht dem Patienten (1'), die Sitzung bei Bedarf zu unterbrechen; ein manueller Not-Aus-Schalter und ein Software-Not-Aus-Schalter für den Bediener, alle diese Not-Aus-Schalter dienen dazu, die Ausführung der Verwaltungssoftware zu unterbrechen und die Ausführung der Sitzung danach, mit oder ohne Speicherung, wiederaufzunehmen.
- System (3) gemäß Patentanspruch 13, 14 oder 15, das dadurch gekennzeichnet ist, dass es im Bodenverwaltungssystem (5) mindestens zwei elektronische Druckregler enthält, die dazu dienen, eine unabhängige Druckregelung der Bandage (1) an den Beinen zu ermöglichen, dies ermöglicht die Anwendung verschiedener Wirkungskräfte auf beide Beine, die Druckregelung in den Antrieben ermöglicht außerdem die Änderung der Kraft, die die Bandage (1) auf die Beine des Patienten (1') ausübt, und somit die Änderung der Mensch-Maschinen-Interaktion, denn je mehr sich der Druck reduziert, desto mehr verringert sich der Druck auf die Beine, und der Patient (1') muss beweisen, dass er selbstständig zu arbeiten weiß.
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| IT000226A ITTO20120226A1 (it) | 2012-03-15 | 2012-03-15 | Tutore attivo per neuroriabilitazione motoria degli arti inferiori, sistema comprendente tale tutore e procedimento per il funzionamento di tale sistema. |
| PCT/IT2013/000055 WO2013136351A2 (en) | 2012-03-15 | 2013-02-20 | Active sling for the motion neurological rehabilitation of lower limbs, system comprising such sling and process for operating such system |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| EP2825146A2 EP2825146A2 (de) | 2015-01-21 |
| EP2825146B1 true EP2825146B1 (de) | 2018-03-28 |
Family
ID=46584191
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP13715459.7A Active EP2825146B1 (de) | 2012-03-15 | 2013-02-20 | Aktivbandage für die motorische neurorehabilitation der beine, system mit einer derartigen aktivbandage und verfahren zum betrieb eines solchen systems |
Country Status (3)
| Country | Link |
|---|---|
| EP (1) | EP2825146B1 (de) |
| IT (1) | ITTO20120226A1 (de) |
| WO (1) | WO2013136351A2 (de) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN109793562A (zh) * | 2019-01-23 | 2019-05-24 | 贾韩静 | 一种拆卸方便的骨折固定支撑架 |
| RU196167U1 (ru) * | 2019-09-12 | 2020-02-18 | Общество с ограниченной ответственностью "Экзомед" | Стопа экзоскелета |
Families Citing this family (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| RU2555801C2 (ru) * | 2013-09-27 | 2015-07-10 | Федеральное государственное бюджетное образовательное учреждение высшего образования "Московский государственный университет имени М.В. Ломоносова" (МГУ) | Аппарат для помощи при ходьбе |
| US9907722B2 (en) | 2014-08-15 | 2018-03-06 | Honda Motor Co., Ltd. | Admittance shaping controller for exoskeleton assistance of the lower extremities |
| CA2884905A1 (en) * | 2014-09-10 | 2016-03-10 | Norberto Velazquez Nino | Adjustable mechanical exoskeleton, for a biped animal with impaired bone and muscle |
| FR3034659B1 (fr) * | 2015-04-07 | 2022-06-10 | Wandercraft | Exosquelette comprenant des coques connectees avec des degres de mobilite passifs |
| CN104983542B (zh) * | 2015-07-24 | 2017-05-31 | 天津科技大学 | 外骨骼式康复辅助装置 |
| CN108095982A (zh) * | 2018-01-04 | 2018-06-01 | 掣京机器人科技(上海)有限公司 | 一种外骨骼机器人的宽度调节装置 |
| RU186439U1 (ru) * | 2018-07-05 | 2019-01-21 | Общество С Ограниченной Ответственностью "Экзоатлет" | Торсовое звено экзоскелета |
| CN111643810B (zh) * | 2020-06-10 | 2023-05-12 | 温州医科大学附属第二医院、温州医科大学附属育英儿童医院 | 下肢运动康复装置 |
| CN111658434A (zh) * | 2020-06-29 | 2020-09-15 | 黑龙江佳德医疗器械有限公司 | 基于气动肌肉的膝过伸柔性外骨骼康复机器人及康复方法 |
| CN112315734B (zh) * | 2020-09-27 | 2022-06-10 | 重庆理工大学 | 气动肌肉驱动下肢康复外骨骼及其康复工作控制方法 |
| CN115813396B (zh) * | 2023-02-15 | 2023-05-19 | 潍坊医学院附属医院 | 可用于提高诊断效率和准确度的外科用诊断工具 |
Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20110066088A1 (en) * | 2007-12-26 | 2011-03-17 | Richard Little | Self contained powered exoskeleton walker for a disabled user |
Family Cites Families (16)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5282460A (en) * | 1992-01-06 | 1994-02-01 | Joyce Ann Boldt | Three axis mechanical joint for a power assist device |
| GB9511648D0 (en) * | 1995-06-08 | 1995-08-02 | Coker Ian | Apparatus for helping persons to walk |
| WO2001014018A1 (en) | 1999-08-20 | 2001-03-01 | The Regents Of The University Of California | Method, apparatus and system for automation of body weight support training (bwst) of biped locomotion over a treadmill using a programmable stepper device (psd) operating like an exoskeleton drive system from a fixed base |
| DE60142399D1 (de) | 2000-08-25 | 2010-07-29 | Healthsouth Corp | Motorisierte gehortese |
| US7125388B1 (en) | 2002-05-20 | 2006-10-24 | The Regents Of The University Of California | Robotic gait rehabilitation by optimal motion of the hip |
| WO2004009011A1 (en) | 2002-07-23 | 2004-01-29 | Healthsouth Corporation | Improved powered gait orthosis and method of utilizing same |
| US20040116839A1 (en) | 2002-12-13 | 2004-06-17 | New Mexico Technical Research Foundation | Gait training apparatus |
| US7331906B2 (en) | 2003-10-22 | 2008-02-19 | Arizona Board Of Regents | Apparatus and method for repetitive motion therapy |
| JP4503311B2 (ja) * | 2004-02-25 | 2010-07-14 | 本田技研工業株式会社 | 脚体運動補助装具の発生トルク制御方法 |
| US7429253B2 (en) * | 2004-09-21 | 2008-09-30 | Honda Motor Co., Ltd. | Walking assistance system |
| US7947004B2 (en) | 2005-01-18 | 2011-05-24 | The Regents Of The University Of California | Lower extremity exoskeleton |
| JP4178187B2 (ja) * | 2005-01-26 | 2008-11-12 | 国立大学法人 筑波大学 | 装着式動作補助装置及び制御用プログラム |
| PL1874239T3 (pl) | 2005-04-13 | 2014-10-31 | Univ California | Pół-wspomagany egzoszkielet kończyny dolnej |
| US7190141B1 (en) * | 2006-01-27 | 2007-03-13 | Villanova University | Exoskeletal device for rehabilitation |
| WO2008124025A1 (en) | 2007-04-06 | 2008-10-16 | University Of Delaware | Powered orthosis |
| KR100976180B1 (ko) | 2008-03-31 | 2010-08-17 | 주식회사 피앤에스미캐닉스 | 보행훈련용 로봇 및 그 운용방법 |
-
2012
- 2012-03-15 IT IT000226A patent/ITTO20120226A1/it unknown
-
2013
- 2013-02-20 EP EP13715459.7A patent/EP2825146B1/de active Active
- 2013-02-20 WO PCT/IT2013/000055 patent/WO2013136351A2/en active Application Filing
Patent Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20110066088A1 (en) * | 2007-12-26 | 2011-03-17 | Richard Little | Self contained powered exoskeleton walker for a disabled user |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN109793562A (zh) * | 2019-01-23 | 2019-05-24 | 贾韩静 | 一种拆卸方便的骨折固定支撑架 |
| CN109793562B (zh) * | 2019-01-23 | 2020-06-16 | 胡将碟 | 一种拆卸方便的骨折固定支撑架 |
| RU196167U1 (ru) * | 2019-09-12 | 2020-02-18 | Общество с ограниченной ответственностью "Экзомед" | Стопа экзоскелета |
Also Published As
| Publication number | Publication date |
|---|---|
| WO2013136351A8 (en) | 2014-11-13 |
| WO2013136351A3 (en) | 2014-03-13 |
| EP2825146A2 (de) | 2015-01-21 |
| WO2013136351A2 (en) | 2013-09-19 |
| ITTO20120226A1 (it) | 2012-06-14 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP2825146B1 (de) | Aktivbandage für die motorische neurorehabilitation der beine, system mit einer derartigen aktivbandage und verfahren zum betrieb eines solchen systems | |
| Trigili et al. | Design and experimental characterization of a shoulder-elbow exoskeleton with compliant joints for post-stroke rehabilitation | |
| Pietrusinski et al. | Robotic gait rehabilitation trainer | |
| US9198821B2 (en) | Lower extremity exoskeleton for gait retraining | |
| US5282460A (en) | Three axis mechanical joint for a power assist device | |
| Costa et al. | Control of a biomimetic" soft-actuated" 10dof lower body exoskeleton | |
| Niyetkaliyev et al. | Review on design and control aspects of robotic shoulder rehabilitation orthoses | |
| ES2666382T3 (es) | Órtesis activa para la rehabilitación neurológica del movimiento de los miembros inferiores, sistema que comprende dicha órtesis y proceso para poner en funcionamiento dicho sistema | |
| US8613691B2 (en) | Dynamic lower limb rehabilitation robotic apparatus and method of rehabilitating human gait | |
| Hussain et al. | Robot assisted treadmill training: mechanisms and training strategies | |
| Unluhisarcikli et al. | Design and control of a robotic lower extremity exoskeleton for gait rehabilitation | |
| US20140213951A1 (en) | Robotic gait rehabilitation training system with orthopedic lower body exoskeleton for torque transfer to control rotation of pelvis during gait | |
| Joel et al. | Review on Gait Rehabilitation Training Using Human Adaptive Mechatronics System in Biomedical Engineering | |
| WO2013086035A1 (en) | Orthopedic lower body exoskeleton for control of pelvic obliquity during gait over-ground | |
| Belforte et al. | Pneumatic interactive gait rehabilitation orthosis: design and preliminary testing | |
| Hussain | State-of-the-art robotic gait rehabilitation orthoses: design and control aspects | |
| KR101635637B1 (ko) | 치료용 운동 방법 및 치료용 운동 장치 | |
| US11135122B2 (en) | Self-supported device for guiding motions of a passive target system | |
| Allemand et al. | Design of a new lower extremity orthosis for overground gait training with the WalkTrainer | |
| Ercolini et al. | A novel generation of ergonomic upper-limb wearable robots: Design challenges and solutions | |
| Shibata et al. | Development of body weight support gait training system using antagonistic bi-articular muscle model | |
| Ranaweera et al. | Anthro-X: Anthropomorphic lower extremity exoskeleton robot for power assistance | |
| EP3768216B1 (de) | System zur gangrehabilitation und gewichtstützvorrichtung für solch ein system | |
| Hwang et al. | A wheelchair integrated lower limb exercise/rehabilitation system: Design and experimental results on the knee joint | |
| Pietrusinski et al. | Robotically generated force fields for stroke patient pelvic obliquity gait rehabilitation |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| 17P | Request for examination filed |
Effective date: 20141002 |
|
| AK | Designated contracting states |
Kind code of ref document: A2 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| AX | Request for extension of the european patent |
Extension state: BA ME |
|
| RIN1 | Information on inventor provided before grant (corrected) |
Inventor name: ZETTIN, MARINA Inventor name: APPENDINO, SILVIA Inventor name: EULA, GABRIELLA Inventor name: BELFORTE, GUIDO Inventor name: GEMINIANI, GIULIANO CARLO |
|
| DAX | Request for extension of the european patent (deleted) | ||
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: EXAMINATION IS IN PROGRESS |
|
| 17Q | First examination report despatched |
Effective date: 20161216 |
|
| GRAP | Despatch of communication of intention to grant a patent |
Free format text: ORIGINAL CODE: EPIDOSNIGR1 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: GRANT OF PATENT IS INTENDED |
|
| INTG | Intention to grant announced |
Effective date: 20170824 |
|
| GRAJ | Information related to disapproval of communication of intention to grant by the applicant or resumption of examination proceedings by the epo deleted |
Free format text: ORIGINAL CODE: EPIDOSDIGR1 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: EXAMINATION IS IN PROGRESS |
|
| INTC | Intention to grant announced (deleted) | ||
| GRAJ | Information related to disapproval of communication of intention to grant by the applicant or resumption of examination proceedings by the epo deleted |
Free format text: ORIGINAL CODE: EPIDOSDIGR1 |
|
| INTC | Intention to grant announced (deleted) | ||
| GRAS | Grant fee paid |
Free format text: ORIGINAL CODE: EPIDOSNIGR3 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: GRANT OF PATENT IS INTENDED |
|
| GRAP | Despatch of communication of intention to grant a patent |
Free format text: ORIGINAL CODE: EPIDOSNIGR1 |
|
| INTG | Intention to grant announced |
Effective date: 20180126 |
|
| GRAA | (expected) grant |
Free format text: ORIGINAL CODE: 0009210 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: THE PATENT HAS BEEN GRANTED |
|
| AK | Designated contracting states |
Kind code of ref document: B1 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| REG | Reference to a national code |
Ref country code: GB Ref legal event code: FG4D |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: EP |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: NV Representative=s name: TR-IP CONSULTING LLC, CH |
|
| REG | Reference to a national code |
Ref country code: AT Ref legal event code: REF Ref document number: 982736 Country of ref document: AT Kind code of ref document: T Effective date: 20180415 |
|
| REG | Reference to a national code |
Ref country code: IE Ref legal event code: FG4D |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R096 Ref document number: 602013035041 Country of ref document: DE |
|
| REG | Reference to a national code |
Ref country code: ES Ref legal event code: FG2A Ref document number: 2666382 Country of ref document: ES Kind code of ref document: T3 Effective date: 20180504 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: FI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20180328 Ref country code: NO Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20180628 Ref country code: HR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20180328 Ref country code: LT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20180328 |
|
| REG | Reference to a national code |
Ref country code: NL Ref legal event code: MP Effective date: 20180328 |
|
| REG | Reference to a national code |
Ref country code: LT Ref legal event code: MG4D |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: GR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20180629 Ref country code: SE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20180328 Ref country code: LV Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20180328 Ref country code: BG Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20180628 Ref country code: RS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20180328 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: NL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20180328 Ref country code: PL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20180328 Ref country code: AL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20180328 Ref country code: RO Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20180328 Ref country code: EE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20180328 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: CZ Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20180328 Ref country code: SM Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20180328 Ref country code: SK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20180328 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: PT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20180730 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R097 Ref document number: 602013035041 Country of ref document: DE |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: DK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20180328 |
|
| PLBE | No opposition filed within time limit |
Free format text: ORIGINAL CODE: 0009261 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: NO OPPOSITION FILED WITHIN TIME LIMIT |
|
| 26N | No opposition filed |
Effective date: 20190103 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20180328 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MC Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20180328 Ref country code: LU Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20190220 |
|
| REG | Reference to a national code |
Ref country code: BE Ref legal event code: MM Effective date: 20190228 |
|
| REG | Reference to a national code |
Ref country code: IE Ref legal event code: MM4A |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20190220 |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: PCAR Free format text: NEW ADDRESS: ROUTE DU COUTSET 18, 1485 NUVILLY (CH) |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: BE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20190228 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: TR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20180328 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MT Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20190220 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: CY Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20180328 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20180728 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: HU Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT; INVALID AB INITIO Effective date: 20130220 |
|
| REG | Reference to a national code |
Ref country code: AT Ref legal event code: UEP Ref document number: 982736 Country of ref document: AT Kind code of ref document: T Effective date: 20180328 |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: PK Free format text: BERICHTIGUNGEN |
|
| PLAA | Information modified related to event that no opposition was filed |
Free format text: ORIGINAL CODE: 0009299DELT |
|
| PLBE | No opposition filed within time limit |
Free format text: ORIGINAL CODE: 0009261 |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: PK Free format text: BERICHTIGUNGEN |
|
| REG | Reference to a national code |
Ref country code: GB Ref legal event code: S117 Free format text: REQUEST FILED; REQUEST FOR CORRECTION UNDER SECTION 117 FILED ON 11 JANUARY 2022 |
|
| R26N | No opposition filed (corrected) |
Effective date: 20190103 |
|
| RIN2 | Information on inventor provided after grant (corrected) |
Inventor name: SACCO, KATIUSCIA Inventor name: ZETTIN, MARINA Inventor name: GEMINIANI, GIULIANO CARLO Inventor name: APPENDINO, SILVIA Inventor name: EULA, GABRIELLA Inventor name: BELFORTE, GUIDO |
|
| 26N | No opposition filed |
Effective date: 20190103 |
|
| REG | Reference to a national code |
Ref country code: GB Ref legal event code: S13A Free format text: APPLICATION FILED; APPLICATION UNDER RULE 10(2) FOR INVENTOR TO BE MENTIONED FILED ON 23 FEBRUARY 2022 BY POLITECNICO DI TORINO |
|
| REG | Reference to a national code |
Ref country code: GB Ref legal event code: S117 Free format text: REQUEST FOR CORRECTION UNDER SECTION 117 FILED ON 11 JANUARY 2022 NOT PROCEEDED WITH ON 15 FEBRUARY 2022 |
|
| REG | Reference to a national code |
Ref country code: AT Ref legal event code: HA Ref document number: 982736 Country of ref document: AT Kind code of ref document: T Inventor name: SACCO, KATIUSCIA, IT Effective date: 20220308 Ref country code: AT Ref legal event code: HA Ref document number: 982736 Country of ref document: AT Kind code of ref document: T Inventor name: ZETTIN, MARINA, IT Effective date: 20220308 Ref country code: AT Ref legal event code: HA Ref document number: 982736 Country of ref document: AT Kind code of ref document: T Inventor name: GEMINIANI, GIULIANO CARLO, IT Effective date: 20220308 Ref country code: AT Ref legal event code: HA Ref document number: 982736 Country of ref document: AT Kind code of ref document: T Inventor name: APPENDINO, SILVIA, IT Effective date: 20220308 Ref country code: AT Ref legal event code: HA Ref document number: 982736 Country of ref document: AT Kind code of ref document: T Inventor name: EULA, GABRIELLA, IT Effective date: 20220308 Ref country code: AT Ref legal event code: HA Ref document number: 982736 Country of ref document: AT Kind code of ref document: T Inventor name: BELFORTE, GUIDO, IT Effective date: 20220308 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20180328 |
|
| REG | Reference to a national code |
Ref country code: GB Ref legal event code: S13A Free format text: APPLICATION ALLOWED; IN A DECISION OF THE COMPTROLLER DATED 24 MARCH 2022, THE COMPTROLLER FOUND THAT KATIUSCIA SACCO SHOULD BE MENTIONED AS A JOINT INVENTOR IN RESPECT OF GRANTED PATENT EP(UK)2825146. THE COMPTROLLER ORDERED THAT AN ADDENDUM SLIP BE PREPARED FOR THE GRANTED PATENT ACCORDINGLY. |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: FR Payment date: 20230224 Year of fee payment: 11 Ref country code: CH Payment date: 20230330 Year of fee payment: 11 Ref country code: AT Payment date: 20230227 Year of fee payment: 11 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: IT Payment date: 20230224 Year of fee payment: 11 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: ES Payment date: 20230426 Year of fee payment: 11 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: ES Payment date: 20240325 Year of fee payment: 12 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: AT Payment date: 20240220 Year of fee payment: 12 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: DE Payment date: 20240219 Year of fee payment: 12 Ref country code: GB Payment date: 20240216 Year of fee payment: 12 Ref country code: CH Payment date: 20240301 Year of fee payment: 12 |