EP2497744A2 - Locking tool - Google Patents
Locking tool Download PDFInfo
- Publication number
- EP2497744A2 EP2497744A2 EP12151923A EP12151923A EP2497744A2 EP 2497744 A2 EP2497744 A2 EP 2497744A2 EP 12151923 A EP12151923 A EP 12151923A EP 12151923 A EP12151923 A EP 12151923A EP 2497744 A2 EP2497744 A2 EP 2497744A2
- Authority
- EP
- European Patent Office
- Prior art keywords
- gripping
- closing tool
- tool according
- magnets
- closure
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 230000033001 locomotion Effects 0.000 claims description 17
- 238000013461 design Methods 0.000 claims description 5
- 238000006073 displacement reaction Methods 0.000 abstract description 2
- 230000008878 coupling Effects 0.000 description 4
- 238000010168 coupling process Methods 0.000 description 4
- 238000005859 coupling reaction Methods 0.000 description 4
- 238000005192 partition Methods 0.000 description 3
- 238000013459 approach Methods 0.000 description 1
- 238000010276 construction Methods 0.000 description 1
- 238000011109 contamination Methods 0.000 description 1
- 230000001419 dependent effect Effects 0.000 description 1
- 238000011161 development Methods 0.000 description 1
- 230000018109 developmental process Effects 0.000 description 1
- 238000003780 insertion Methods 0.000 description 1
- 230000037431 insertion Effects 0.000 description 1
- 230000003993 interaction Effects 0.000 description 1
- 238000004519 manufacturing process Methods 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
Images




Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B67—OPENING, CLOSING OR CLEANING BOTTLES, JARS OR SIMILAR CONTAINERS; LIQUID HANDLING
- B67B—APPLYING CLOSURE MEMBERS TO BOTTLES JARS, OR SIMILAR CONTAINERS; OPENING CLOSED CONTAINERS
- B67B3/00—Closing bottles, jars or similar containers by applying caps
- B67B3/20—Closing bottles, jars or similar containers by applying caps by applying and rotating preformed threaded caps
- B67B3/2066—Details of capping heads
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B67—OPENING, CLOSING OR CLEANING BOTTLES, JARS OR SIMILAR CONTAINERS; LIQUID HANDLING
- B67B—APPLYING CLOSURE MEMBERS TO BOTTLES JARS, OR SIMILAR CONTAINERS; OPENING CLOSED CONTAINERS
- B67B2201/00—Indexing codes relating to constructional features of closing machines
- B67B2201/08—Aseptic features
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B67—OPENING, CLOSING OR CLEANING BOTTLES, JARS OR SIMILAR CONTAINERS; LIQUID HANDLING
- B67B—APPLYING CLOSURE MEMBERS TO BOTTLES JARS, OR SIMILAR CONTAINERS; OPENING CLOSED CONTAINERS
- B67B3/00—Closing bottles, jars or similar containers by applying caps
- B67B3/26—Applications of control, warning, or safety devices in capping machinery
- B67B3/268—Applications of control, warning, or safety devices in capping machinery devices for avoiding damage to the closing machine
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10—TECHNICAL SUBJECTS COVERED BY FORMER USPC
- Y10S—TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10S7/00—Compound tools
- Y10S7/901—Magnetic feature
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10—TECHNICAL SUBJECTS COVERED BY FORMER USPC
- Y10T—TECHNICAL SUBJECTS COVERED BY FORMER US CLASSIFICATION
- Y10T279/00—Chucks or sockets
- Y10T279/23—Chucks or sockets with magnetic or electrostatic means
Definitions
- the invention relates to a closing tool explained in the preamble of claim 1 Art.
- Such a closing tool is from the WO 2004/009484 known.
- the known closure tool includes a gripping means of a plurality of gripping segments which are circularly grouped about a center line which in use coincides with the center line of the container and which can approach and depart to a limited extent from the center line. With this embodiment, minor tolerances that can occur regularly even with the most careful production of closures are compensated, so that the error rate is not screwed closures is reduced.
- the gripping segments are slidably received for this purpose radially to the center line in a posture and are loaded in the direction of their closed position by springs.
- One of the springs is placed as an O-ring over the outer circumference of the gripping segments and pushes the gripping segments toward the center line.
- Another spring acts axially of the center line and presses the gripping segments against a provided on the underside of the closing tool retaining plate so that there is increased friction.
- the opening movement of the gripping segments for receiving the closure must be applied when pressing the closing tool on the closure to accommodate this.
- the closing tool is pressed onto the closure from above, wherein an inlet slope on the gripping segments ensures that the closure can radially press apart the gripping segments, against both the force of the annular spring and against the frictional force on the support plate until the closure in the interior of the tool abuts against a stop.
- Both the O-ring spring and the friction on the support plate then ensure that the gripping segments do not drift further apart, so that the closure can be held.
- the load capacity of an O-ring is limited, so that only small differences in the closure sizes can be covered.
- the invention is therefore based on the object, a closure tool for a capping machine for applying a closure on a container universally form.
- the tolerance range to be handled by the gripping device is greatly increased, both with regard to dimensions / tolerances as well as in terms of contour or in terms of mechanical strength.
- the gripping device according to the invention is formed with mutually movable gripping members.
- the gripping members may be pivotable about an axis to perform gripping and releasing movements.
- the gripper path for the correct gripping of the closure is not limited to the actual dimensions of the closure, since the closure does not have to open the gripper.
- the closing tool according to the invention works more gently, since there is no friction between the closure and the gripping device for gripping (picking) and the opening force of the gripping device does not have to be applied through the closure.
- the magnets of the magnetic actuator can be adjusted by a gleichpoligen in a non-uniform opposition by relative displacement or by rotational movements.
- One embodiment is to arrange the gripping members in a circle about a center line and to pivot about a pivot axis and to arrange one of the magnets of the magnet actuator on the gripping member, the second magnet of the gripper being fixed to a support movable along the center line Magnetic attraction and magnetic repulsion, the gripping device is opened or closed.
- This embodiment also has the advantage that the closing tool can thus be equipped in a simple manner for aseptic operation, wherein only the holder is received in a closed sleeve (permeable to the magnetic field), so that a contamination of the aseptically held closing tool from the drive side (Screwing and lifting movements) is prevented.
- a particularly simple construction results from the fact that the gripping members are arranged radially displaceably in a holder and the magnets of the magnet actuation are arranged distributed around the gripping segments on two concentric circles.
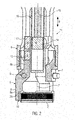
- Fig. 1 shows in schematic representation and in longitudinal section a closing unit 1 of a closing machine for closing containers, not shown with a closure 2.
- the closing unit 1 is shown in the illustrated embodiment in aseptic design and includes a partition wall 3 of the closing machine, a clean room area RR of a gray room GR separates.
- the partition wall 3 separates the closing unit 1 into a drive part 4 and a closing tool 5.
- the tool 5 a housing 6, in which a gripping device 7 is housed.
- the gripping device 7 is preferably replaceable housed in the housing 6 and can be exchanged for the handling of different closures. Especially with aseptic design, these components are gap-free and sealed mounted.
- the gripping device 7 includes in the illustrated embodiment, a plurality of gripping members 8 in the form of gripping segments, which are grouped around the center line 7 'of the gripping device 7.
- the term "gripping member” is intended to cover all structures capable of gripping and holding the shutter 2.
- Each gripping member 8 is pivotable about a substantially horizontal axis of rotation 9 in the form of a bolt or the like. In a gripping position for holding the shutter 2 and a release position for releasing the shutter.
- the rotation axis 9 divides the gripping member 8 into a lower arm 8a provided with gripping members 10 such as latching projections or corrugations or the like with which the shutter 2 can be securely held, and an upper arm 8b to which a magnetic actuator 11 for pivoting the gripping members 8 about the axis of rotation 9 and thus for opening and closing the gripping device 7 acts.
- the magnet actuation 11 preferably contains permanent magnets and is based on the known physical principle that poles of the same name repel from permanent magnets and attract different poles.
- the solenoid actuation 11 is executed in the illustrated embodiment in linear combination, wherein a first magnet 12 and a second magnet 13 in the axial direction next to each other along the center line 7 'on the second arm 8b of the gripping member 8 are.
- the two magnets are aligned so that they point with different poles in the direction of the center line 7 ', wherein in the illustrated embodiment, the upper magnet 12 with its north pole and the lower magnet 13 with its south pole in the direction of the center line 7'.
- the solenoid actuator 11 further includes a third magnet 14, which, however, is responsible for all gripping members 8.
- the third magnet 14 is preferably a ring magnet whose outer circumference has the north pole.
- the third magnet 14 is fixed to a support 15 in the form of a support rod which is coaxial with the center line 7 ', and in the direction of actuation B of his in Fig. 2 shown opposite to the first magnet 12 in a opposite position to the second magnet 13 and can be moved back. If the third magnet 14 is located at the level of the first magnets 12 of all gripping members 8, the gripping members 8 are pivoted into the in Fig. 2 shown closed position, the gripped closure 2 can be held and screwed. When this is done, the third magnet 14 moves down the center line 7 'until it faces the second magnet 13 of all the gripping members 8. Now takes place the attraction, which pivot the gripping members 8 about the axis of rotation 9 in an open position in which the shutter 2 is released.
- This type of solenoid actuation 11 is particularly suitable for the clean room or aseptic design Fig. 1 , here only the support rod 15 with the third magnet 14 in a closed, sleeve-like Auswerferstange 16 (permeable to magnetic fields) accommodated is.
- This ejector rod 16 can be easily sealed by a sleeve 17, which is sealingly secured around a passage opening 18 through the partition wall 3, and at the bottom of the ejector 16, again in turn, the passage opening sealingly attached.
- the drive movement with regard to the screw-on rotation can be transmitted to a rotary sleeve 20 via a gear coupling 19, for example.
- the rotary sleeve 20 transmits the rotation via a magnetic actuator in the form of a magnetic coupling 21 on an inner sleeve 22 to which the tool 5 is attached (preferably releasably via a corresponding coupling 23).
- the lifting movement for opening and closing the gripping members 8 also takes place via the magnetic coupling 21 on the tool 5, wherein the lifting movement is transmitted here only during the screwing movement.
- the movement of the support rod 15 is separate from the lifting movement and independent of the drive system.
- the drive movements can also by other means, such. B. be generated pneumatically, electrically or electromagnetically.
- stops 25 for the insertion depth of the closure 2 into the tool can be arranged.
- the 3 and 4 show a modified embodiment of a closing tool 105, which differs from the embodiment according to the Fig. 1 and 2 only differs by a different arrangement of the magnets of the magnetic actuator 111.
- closing tool 105 which accommodated in the ejection bar 116 support rod 115 includes the in Fig. 4 shown magnet assembly 114, in which a plurality of magnets 114a to 114f are arranged circularly and with alternating polarity about the center line 7 ', so that alternately a south pole and a north pole to the outside, ie away from the center line 7'.
- the gripping members 8 in the form of gripping segments are here only provided with the first magnet 12, which on all three segments with the same polarity inwards, i. pointing to the center line 7 ', are arranged. In the illustrated embodiment, this is the north pole.
- the support rod 15 is not axially displaced longitudinally to the center line 7 ', but rotated about it, as indicated by the arrow D.
- each other poles come in a position opposite the first magnet 12 at the gripping segments position, wherein, like Fig. 4 shows, initially a repulsion takes place to close the gripping device, and in the next step, an attraction takes place and thus the gripping segments opens.
- This embodiment of the closing tool 105 is cleanroom or aseptiktauglich.
- Fig. 5 shows a further embodiment of a closing tool 305 according to the invention, which shows features of the two preceding embodiments, wherein identical or similar components are marked with reference numerals increased by 300 and not explained again.
- the closure tool 305 includes a plurality of gripping segments 308 which are pivotable about a pivot axis 309.
- the lower arm 308a formed thereby is provided with the gripping members 10 and the upper arm 308b carries a magnet 312.
- the counter magnet (s) 314 are fixed to a rotating ring 337 of the holder 306 such that the interaction between attraction for opening and opening already described above Repulsion to close the gripping device 311 results.
- the Fig. 6 and 7 show a further embodiment of a closing tool 205 according to the invention, which is characterized by a simple configuration.
- the closure tool 205 includes a gripping means 207 having a plurality of gripping members 208 in the form of gripping segments which are arranged in a circle around the center line 7 '.
- the gripping members 208 are, however, in the direction of the double arrow S on the center line 7 'to and away from her displaced, which can be effected by suitable guides, such as the indicated guide rod 226.
- the tool 205 also has a solenoid actuator 211 with first magnets 212 and opposed (third) magnets 214 arranged on concentric circles about the centerline 7 '.
- the closing tool 205 for a movement of the gripping members 208 in a gripping position and a release position with respect to the shutter 2, this time be designed by moving by the magnets 214 in a circle around the center line 7 'with each alternating Are installed polarity, so that by rotation of the holder 206 each have different polarities opposite the magnet 212.
- the magnets 214, 212 are fixed and installed in such a way that the same polarities are opposite to produce a repulsive force.
- the magnetic force and the gap L is adjusted so that the gripping members 208 surround a gap around the center line 7 ', which is at least equal, but preferably smaller than the diameter of the male closure 2.
- the gripping members 208 are what is particularly important here , provided on its underside with inlet slopes 37, so that the closure when placing the tool 205, the gripping members 208 against the repulsive force of the magnets 212, 214 apart and thereby the holding force when handling the closure 2 and the application of the closure 2 is applied.
- the gripping members 208 Upon removal of the tool 205 from the sealed container, the gripping members 208 return to their original position by the repulsive force of the magnets 212, 214.
- the closing tool 205 also has on its holder 206 a drive toothing 219 for applying the screwing movement.
- the magnets 214 are each received in brackets 236 which are individually adjustably attached to the bracket 206 so that the gap L between the magnets 212, 214 along the guide rod 226 can be adjusted.
- the closing tools according to the invention can also be used with other gripping members, such. Gripping arms, be formed, which have a greater distance from each other.
- Gripping arms be formed, which have a greater distance from each other.
- a special design for special forms of closures is possible.
Abstract
Description
Die Erfindung bezieht sich auf ein Verschließwerkzeug der im Oberbegriff von Anspruch 1 erläuterten Art.The invention relates to a closing tool explained in the preamble of claim 1 Art.
Ein derartiges Verschließwerkzeug ist aus der
Der Erfindung liegt somit die Aufgabe zugrunde, ein Verschließwerkzeug für eine Verschließmaschine zum Aufbringen eines Verschlusses auf einen Behälter universell auszubilden.The invention is therefore based on the object, a closure tool for a capping machine for applying a closure on a container universally form.
Die Aufgabe wird durch die im Anspruch 1 angegebenen Merkmale gelöst.The object is solved by the features specified in claim 1.
Durch die erfindungsgemäß eingesetzte Magnetbetätigung wird der von der Greifeinrichtung zu bewältigende Toleranzbereich stark erhöht, und zwar sowohl im Hinblick auf Abmessungen/Toleranzen als auch im Hinblick auf Kontur oder im Hinblick auf die mechanische Festigkeit.As a result of the magnetic actuation used according to the invention, the tolerance range to be handled by the gripping device is greatly increased, both with regard to dimensions / tolerances as well as in terms of contour or in terms of mechanical strength.
Vorteilhafte Weiterbildungen sind den Unteransprüchen zu entnehmen.Advantageous developments can be found in the dependent claims.
Bevorzugt ist die erfindungsgemäße Greifeinrichtung mit zueinander bewegbaren Greiforganen ausgebildet.Preferably, the gripping device according to the invention is formed with mutually movable gripping members.
Die Greiforgane können um eine Achse verschwenkbar sein, um Greif- und Freigabebewegungen auszuführen. Dabei ist der Greiferweg für das korrekte Ergreifen des Verschlusses nicht auf die tatsächlichen Abmessungen des Verschlusses beschränkt, da der Verschluss den Greifer nicht öffnen muss. Darüber hinaus arbeitet das erfindungsgemäße Verschließwerkzeug schonender, da zum Ergreifen (Picken) keine Reibung zwischen Verschluss und Greifeinrichtung stattfindet und die Öffnungskraft der Greifeinrichtung nicht durch den Verschluss aufgebracht werden muss.The gripping members may be pivotable about an axis to perform gripping and releasing movements. In this case, the gripper path for the correct gripping of the closure is not limited to the actual dimensions of the closure, since the closure does not have to open the gripper. In addition, the closing tool according to the invention works more gently, since there is no friction between the closure and the gripping device for gripping (picking) and the opening force of the gripping device does not have to be applied through the closure.
Für die Magnetbetätigung gibt es im Rahmen der physikalischen Prinzipien (ungleiche Pole ziehen sich an, gleiche Pole stoßen sich ab) die unterschiedlichsten technischen Lösungen. So können beispielsweise die Magneten der Magnetbetätigung von einer gleichpoligen in eine ungleichpolige Gegenüberstellung durch relatives Verschieben oder durch Drehbewegungen verstellt werden.For magnetic actuation there are many different technical solutions within the framework of the physical principles (unequal poles attract each other, same poles repel each other). Thus, for example, the magnets of the magnetic actuator can be adjusted by a gleichpoligen in a non-uniform opposition by relative displacement or by rotational movements.
Ein Ausführungsbeispiel besteht darin, die Greiforgane kreisförmig um eine Mittellinie anzuordnen und um eine Schwenkachse schwenkbar zu lagern und einen der Magneten der Magnetbetätigung am Greiforgan anzuordnen, wobei der zweite Magnet der Greifeinrichtung an einer Halterung befestigt ist, die entlang der Mittellinie derart bewegbar ist, dass durch Magnetanziehung und Magnetabstoßung die Greifeinrichtung geöffnet oder geschlossen wird. Diese Ausgestaltung hat weiterhin den Vorteil, dass das Verschließwerkzeug damit auf einfache Weise für einen aseptischen Betrieb ausgerüstet werden kann, wobei lediglich die Halterung in einer geschlossenen Hülse (für das Magnetfeld durchlässig) aufgenommen wird, so dass eine Kontamination des aseptisch gehaltenen Verschließwerkzeuges von der Antriebsseite (Schraub- und Hubbewegungen) verhindert wird.One embodiment is to arrange the gripping members in a circle about a center line and to pivot about a pivot axis and to arrange one of the magnets of the magnet actuator on the gripping member, the second magnet of the gripper being fixed to a support movable along the center line Magnetic attraction and magnetic repulsion, the gripping device is opened or closed. This embodiment also has the advantage that the closing tool can thus be equipped in a simple manner for aseptic operation, wherein only the holder is received in a closed sleeve (permeable to the magnetic field), so that a contamination of the aseptically held closing tool from the drive side (Screwing and lifting movements) is prevented.
Eine besonders einfache Konstruktion ergibt sich dadurch, dass die Greiforgane in einer Halterung radial verschiebbar angeordnet sind und die Magnete der Magnetbetätigung um die Greifsegmente herum auf zwei konzentrischen Kreisen verteilt angeordnet sind.A particularly simple construction results from the fact that the gripping members are arranged radially displaceably in a holder and the magnets of the magnet actuation are arranged distributed around the gripping segments on two concentric circles.
Zusätzlich zu der Magnetbetätigung der Greifeinrichtung können auch andere notwendige Bewegungen des Verschließwerkzeuges, beispielsweise eine Hubbewegung in Richtung auf und vom Behälter weg, aber auch eine Schraubbewegung, wenigstens teilweise durch Magnetkraft erzeugt werden.In addition to the magnetic actuation of the gripping device, other necessary movements of the closing tool, for example a lifting movement in the direction of and away from the container, but also a screwing motion, at least partially generated by magnetic force.
Bevorzugt sind Möglichkeiten vorhanden, die Magnetkraft einstellen zu können, um unterschiedlichen mechanischen Festigkeiten der Verschlüsse Rechnung zu tragen.There are preferably possibilities to be able to adjust the magnetic force in order to take account of different mechanical strengths of the closures.
Ausführungsbeispiele der Erfindung werden nachfolgend anhand der Zeichnungen näher erläutert. Es zeigen:
- Fig. 1
- einen Längsschnitt durch ein Verschließelement einer Verschließeinrichtung mit einem erfindungsgemäßen Verschließwerkzeug,
- Fig. 2
- eine herausvergrößerte Darstellung des Verschließwerkzeuges nach
Fig. 1 , - Fig. 3
- ein abgewandeltes Ausführungsbeispiel des Verschließwerkzeuges nach
Fig. 2 , - Fig. 4
- die Magnetbetätigung des Verschließwerkzeuges nach
Fig. 3 , - Fig. 5
- einen Längsschnitt durch ein weiteres Ausführungsbeispiel eines erfindungsgemäßen Verschließwerkzeuges,
- Fig. 6
- eine perspektivische Darstellung eines weiteren Ausführungsbeispiels eines erfindungsgemäßen Verschließwerkzeuge, und
- Fig. 7
- einen Längsschnitt durch das Ausführungsbeispiel nach
Fig. 6 .
- Fig. 1
- a longitudinal section through a closing element of a closing device with a closing tool according to the invention,
- Fig. 2
- an enlarged view of the closing tool after
Fig. 1 . - Fig. 3
- a modified embodiment of the closing tool according to
Fig. 2 . - Fig. 4
- the magnetic actuation of the closing tool after
Fig. 3 . - Fig. 5
- a longitudinal section through a further embodiment of a closing tool according to the invention,
- Fig. 6
- a perspective view of another embodiment of a closing tools according to the invention, and
- Fig. 7
- a longitudinal section through the embodiment according to
Fig. 6 ,
Wie auch in Verbindung mit
Die Greifeinrichtung 7 enthält im dargestellten Ausführungsbeispiel eine Mehrzahl von Greiforganen 8 in Form von Greifsegmenten, die um die Mittellinie 7' der Greifeinrichtung 7 herumgruppiert sind. Mit dem Begriff "Greiforgan" sollen alle Strukturen abgedeckt werden, die in der Lage sind, den Verschluss 2 zu ergreifen und festzuhalten.The
Jedes Greiforgan 8 ist über eine im Wesentlichen horizontale Drehachse 9 in Form eines Bolzens oder dgl. in eine Greifposition zum Halten des Verschlusses 2 und eine Löseposition zum Freigeben des Verschlusses verschwenkbar. Die Drehachse 9 unterteilt das Greiforgan 8 in einen unteren Arm 8a, der mit Greifelementen 10, wie beispielsweise Rastvorsprüngen oder Riffelungen oder dgl. versehen ist, mit denen der Verschluss 2 sicher gehalten werden kann, und einen oberen Arm 8b, auf den eine Magnetbetätigung 11 zum Verschwenken der Greiforgane 8 um die Drehachse 9 und somit zum Öffnen und Schließen der Greifeinrichtung 7 einwirkt. Die Magnetbetätigung 11 enthält bevorzugt Permanentmagnete und beruht auf dem bekannten physikalischen Prinzip, dass sich gleichnamige Pole von Permanentmagneten absto-βen und unterschiedliche Pole anziehen. Die Magnetbetätigung 11 ist im dargestellten Ausführungsbeispiel in Linearkombination ausgeführt, wobei sich ein erster Magnet 12 und ein zweiter Magnet 13 in Axialrichtung nebeneinander entlang der Mittellinie 7' auf dem zweiten Arm 8b des Greiforgans 8 befinden. Die beiden Magneten sind so ausgerichtet, dass sie mit unterschiedlichen Polen in Richtung auf die Mittellinie 7' weisen, wobei im dargestellten Ausführungsbeispiel der obere Magnet 12 mit seinem Nordpol und der untere Magnet 13 mit seinem Südpol in Richtung auf die Mittellinie 7' weist. Die Magnetbetätigung 11 enthält weiterhin einen dritten Magneten 14, der jedoch für alle Greiforgane 8 zuständig ist. Der dritte Magnet 14 ist bevorzugt ein Ringmagnet, dessen äußerer Umfang den Nordpol aufweist. Der dritte Magnet 14 ist an einer Halterung 15 in Form einer Haltestange befestigt, die koaxial zur Mittellinie 7' verläuft, und in Betätigungsrichtung B von seiner in
Diese Art der Magnetbetätigung 11 eignet sich besonders für die Reinraum- oder aseptische Ausgestaltung nach
Die Hubbewegung zum Öffnen und Schließen der Greiforgane 8 erfolgt ebenfalls über die Magnetkupplung 21 auf das Werkzeug 5, wobei die Hubbewegung hier nur während der Schraubbewegung übertragen wird. Die Bewegung der Haltestange 15 erfolgt getrennt von der Hubbewegung und unabhängig von deren Antriebssystem.The lifting movement for opening and closing the gripping
Die Antriebsbewegungen können jedoch auch durch andere Mittel, wie z. B. pneumatisch, elektrisch oder elektromagnetisch erzeugt werden.However, the drive movements can also by other means, such. B. be generated pneumatically, electrically or electromagnetically.
An der dem Verschluss 2 gegenüberliegenden Unterseite der Greiforgane können Anschläge 25 für die Einsetztiefe des Verschlusses 2 in das Werkzeug, bevorzugt auswechselbar, angeordnet sein.At the bottom of the gripping members opposite the
Die
Die Greiforgane 8 in Form von Greifsegmenten sind hier lediglich mit dem ersten Magneten 12 versehen, die an allen drei Segmenten mit der gleichen Polarität nach innen, d.h. zur Mittellinie 7' weisend, angeordnet sind. Im dargestellten Ausführungsbeispiel ist dies der Nordpol.The gripping
In diesem Ausführungsbeispiel wird die Haltestange 15 nicht axial zur Mittellinie 7' längsverschoben, sondern um sie gedreht, wie dies durch den Pfeil D angedeutet ist. Dabei kommen nach jeder 1/6-Drehung jeweils andere Pole in eine den ersten Magneten 12 an den Greifsegmenten gegenüberliegenden Stellung, wobei, wie
Die
Das Verschließwerkzeug 205 kann, wie bei den vorangegangenen Ausführungsbeispielen, für eine Bewegung der Greiforgane 208 in eine Greifposition und eine Freigabeposition in Bezug auf den Verschluss 2, diesmal durch Verschieben ausgelegt werden, indem die Magnete 214 im Kreis um die Mittellinie 7' mit jeweils abwechselnder Polarität eingebaut sind, so dass durch Verdrehung der Halterung 206 jeweils unterschiedliche Polaritäten den Magneten 212 gegenüberliegen.The
Bevorzugt sind jedoch die Magneten 214, 212 ortsfest und derart eingebaut, dass sich gleiche Polaritäten zur Erzeugung einer Abstoßungskraft gegenüberliegen. Dabei wird die Magnetkraft und der Spalt L so eingestellt, dass die Greiforgane 208 einen Zwischenraum um die Mittellinie 7' umgeben, der wenigstens gleich, bevorzugt jedoch kleiner ist als der Durchmesser des aufzunehmenden Verschlusses 2. Die Greiforgane 208 sind, was hier besonders wichtig ist, an ihrer Unterseite mit Einlaufschrägen 37 versehen, so dass der Verschluss beim Aufsetzen des Werkzeuges 205 die Greiforgane 208 gegen die Abstoßungskraft der Magneten 212, 214 auseinanderdrückt und dadurch die Haltekraft beim Handhaben des Verschlusses 2 und beim Aufbringen des Verschlusses 2 aufgebracht wird. Beim Abziehen des Werkzeuges 205 vom verschlossenen Behälter kehren die Greiforgane 208 durch die Abstoßungskraft der Magnete 212, 214 wieder in ihre Ausgangsposition zurück.Preferably, however, the
Das Verschließwerkzeug 205 weist an seiner Halterung 206 weiterhin eine Antriebsverzahnung 219 zum Aufbringen der Schraubbewegung auf.The
Durch die Lagerung bei der dargestellten Ausführungsvariante kann, ebenso wie bei den beschriebenen Ausführungsformen, eine Möglichkeit vorgesehen sein, die Magnetkraft einzustellen. Dies kann beispielsweise durch Variation der Abstände zwischen den einander beeinflussenden Magneten der Magnetbetätigung geschehen. Im dargestellten Ausführungsbeispiel sind die Magnete 214 jeweils in Halterungen 236 aufgenommen, die einzeln einstellbar an der Halterung 206 befestigt sind, so dass der Spalt L zwischen den Magneten 212, 214 entlang der Führungsstange 226 eingestellt werden kann.By the storage in the illustrated embodiment, as well as in the described embodiments, a possibility may be provided to adjust the magnetic force. This can be done, for example, by varying the distances between the interacting magnets of the solenoid actuation. In the illustrated embodiment, the
In Abwandlung der beschriebenen und gezeichneten Ausführungsbeispiele können die erfindungsgemäßen Verschließwerkzeuge auch mit anderen Greiforganen, wie z.B. Greifarmen, ausgebildet sein, die einen größeren Abstand zueinander aufweisen. Auch eine spezielle Ausgestaltung für Sonderformen von Verschlüssen ist möglich. Schließlich können Einzelheiten der Figuren untereinander ausgetauscht werden, z.B. können die Tiefenanschläge für die Verschlüsse und/oder die Einstellbarkeit der Magnetkraft in allen Ausführungsbeispielen vorgesehen sein.In a modification of the described and illustrated embodiments, the closing tools according to the invention can also be used with other gripping members, such. Gripping arms, be formed, which have a greater distance from each other. A special design for special forms of closures is possible. Finally, details of the figures can be interchanged, e.g. the depth stops for the closures and / or the adjustability of the magnetic force can be provided in all embodiments.
Claims (12)
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| SI201230153T SI2497744T1 (en) | 2011-03-09 | 2012-01-20 | Locking tool |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| DE102011005306A DE102011005306A1 (en) | 2011-03-09 | 2011-03-09 | A closure |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| EP2497744A2 true EP2497744A2 (en) | 2012-09-12 |
| EP2497744A3 EP2497744A3 (en) | 2013-07-24 |
| EP2497744B1 EP2497744B1 (en) | 2014-12-24 |
Family
ID=45592181
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP12151923.5A Active EP2497744B1 (en) | 2011-03-09 | 2012-01-20 | Locking tool |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US9388031B2 (en) |
| EP (1) | EP2497744B1 (en) |
| CN (1) | CN102674219B (en) |
| DE (1) | DE102011005306A1 (en) |
| SI (1) | SI2497744T1 (en) |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP2730533A2 (en) * | 2012-11-09 | 2014-05-14 | Krones AG | Device for applying a closure to a container |
| EP2724976A3 (en) * | 2012-10-29 | 2014-12-24 | Krones AG | Capper for containers |
| IT201700047818A1 (en) * | 2017-05-03 | 2018-11-03 | Arol Spa | CAPPING HEAD FOR APPLICATION OF CAPSULES ON CONTAINERS OR BOTTLES |
| EP3828127A1 (en) * | 2019-11-29 | 2021-06-02 | KRONES Aktiengesellschaft | Closing device for closing containers |
Families Citing this family (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102012110751A1 (en) * | 2012-11-09 | 2014-05-15 | Krones Ag | Device for applying a closure to a container |
| CN104444982A (en) * | 2013-09-17 | 2015-03-25 | 山东穆拉德生物医药科技有限公司 | Cap gripper for pomegranate juice filling machine |
| JP6177724B2 (en) * | 2014-05-27 | 2017-08-09 | ファナック株式会社 | Tool gripping mechanism |
| IT201600085761A1 (en) * | 2016-08-17 | 2018-02-17 | Arol Spa | "Self-adjusting capping spindle to apply closing elements on containers" |
| IT201600106129A1 (en) * | 2016-10-21 | 2018-04-21 | Arol Spa | CAPPING HEAD FOR APPLICATION OF CAPSULES ON CONTAINERS OR BOTTLES |
| IT201600106114A1 (en) * | 2016-10-21 | 2018-04-21 | Arol Spa | GRIPPING UNIT FOR CAPPING HEAD FOR APPLYING CAPSULES ON CONTAINERS OR BOTTLES |
| US10981766B2 (en) * | 2016-12-06 | 2021-04-20 | Michael P. Scott | Capping chuck assembly |
| US10780439B2 (en) | 2018-08-31 | 2020-09-22 | Industrial Technology Research Institute | Magnetic screwdriver device |
| US10961100B2 (en) | 2018-08-31 | 2021-03-30 | Industrial Technology Research Institute H | Magnetic screwdriver device |
| DK3763666T3 (en) * | 2019-07-12 | 2022-01-10 | Unilogo Robotics Sp Z O O | Grabs for a bottle cap machine |
| CN111302286A (en) * | 2020-03-11 | 2020-06-19 | 英攀东 | Automatic capping equipment for glass canned food |
| WO2023117062A1 (en) * | 2021-12-21 | 2023-06-29 | Sidel Participations | Magnetic gripper for handling containers adapted to contain a pourable product |
Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2004009484A1 (en) | 2002-07-19 | 2004-01-29 | Alcoa Deutschland Gmbh | Closing cone |
Family Cites Families (28)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US871998A (en) * | 1906-06-13 | 1907-11-26 | Georg Kirkegaard | Bottle-capping machine. |
| US2030188A (en) * | 1934-12-08 | 1936-02-11 | Cons Packaging Machinery Corp | Magnetic capping chuck |
| DE1006292B (en) * | 1955-01-12 | 1957-04-11 | Hoefliger & Karg | Method and device for screwing on screw caps |
| GB793276A (en) * | 1955-01-12 | 1958-04-16 | Otto Hofliger | Method and device for screwing threaded caps on to containers |
| GB1484262A (en) * | 1973-09-27 | 1977-09-01 | Metal Box Co Ltd | Capping machine |
| US4633646A (en) * | 1985-10-29 | 1987-01-06 | Aluminum Company Of America | Capping head |
| US4674264A (en) * | 1986-02-03 | 1987-06-23 | Aluminum Company Of America | Screwcapping head with a hysteresis clutch |
| DE3640417A1 (en) * | 1986-11-26 | 1988-06-09 | Bosch Gmbh Robert | SCREW HEAD ON CONTAINER LOCKING MACHINE |
| US5313765A (en) * | 1991-11-04 | 1994-05-24 | Anderson-Martin Machine Company | Capping machine head with magnetic clutch |
| IT1264178B1 (en) * | 1993-07-28 | 1996-09-23 | Azionaria Costruzioni Acma Spa | CAPPING UNIT FOR AUTOMATIC ASSEMBLY OF PUMP BOTTLES. |
| AT640U1 (en) * | 1993-10-22 | 1996-02-26 | Sez Semiconduct Equip Zubehoer | GRIPPERS FOR SEMICONDUCTOR WAFERS AND OTHER DISC-SHAPED ITEMS |
| US5479762B1 (en) * | 1994-05-06 | 1997-07-15 | Dowbrands Lp | Carrier puck |
| CA2162623A1 (en) | 1995-08-11 | 1997-02-12 | Dennis Winski | Screwcapping and pump placing apparatus |
| US6041571A (en) * | 1998-01-29 | 2000-03-28 | Fowler Products Company | Magnetic coupling for a capping apparatus |
| US6076875A (en) * | 1998-02-18 | 2000-06-20 | Systems, Machines, Automation Components, Corporation | Gripper for linear voice coil actuator |
| JP2000343473A (en) * | 1999-06-03 | 2000-12-12 | Smc Corp | Parallel opening/closing chuck |
| US6386609B1 (en) * | 1999-06-12 | 2002-05-14 | Applied Materials, Inc. | Gripper design to reduce backlash |
| JP3293802B2 (en) * | 1999-07-07 | 2002-06-17 | エスエムシー株式会社 | Chuck with position detection function |
| US6626476B1 (en) * | 2000-07-18 | 2003-09-30 | Applied Materials, Inc. | Robotic gripper apparatus |
| JP2006102920A (en) * | 2004-10-08 | 2006-04-20 | Fanuc Ltd | Grip-type hand |
| ITPR20050024A1 (en) * | 2005-05-19 | 2006-11-20 | Rejves Srl | BOLT HEAD TO SCREW THE RING OF A GRIPPET PUMP ON A CONTAINER. |
| US7699087B2 (en) * | 2005-06-29 | 2010-04-20 | Schenck Rotec Gmbh | Method for mounting a pneumatic tire |
| DE102005041929A1 (en) * | 2005-09-03 | 2007-03-08 | Krones Ag | Gripper for container |
| ITTO20060706A1 (en) * | 2006-10-02 | 2008-04-03 | Arol Spa | "HEAD OF SCREWING AND ROLLING FOR THE APPLICATION OF PRE-THREADED CAPS" |
| DE102008055617B4 (en) * | 2008-11-03 | 2015-08-27 | Khs Gmbh | Clamp for gripping bottlenecks, in particular PET bottles |
| DE102008062315A1 (en) * | 2008-12-11 | 2010-06-17 | Khs Corpoplast Gmbh & Co. Kg | Method and device for transferring workpieces |
| DE102009009822A1 (en) * | 2009-02-20 | 2010-08-26 | Krones Ag | Device for closing containers with non-contact torque generation |
| DE102009017109A1 (en) * | 2009-04-15 | 2010-10-28 | Khs Gmbh | Capper for screw caps or caps |
-
2011
- 2011-03-09 DE DE102011005306A patent/DE102011005306A1/en not_active Withdrawn
-
2012
- 2012-01-20 SI SI201230153T patent/SI2497744T1/en unknown
- 2012-01-20 EP EP12151923.5A patent/EP2497744B1/en active Active
- 2012-02-24 US US13/404,417 patent/US9388031B2/en active Active
- 2012-03-09 CN CN201210062194.9A patent/CN102674219B/en active Active
Patent Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2004009484A1 (en) | 2002-07-19 | 2004-01-29 | Alcoa Deutschland Gmbh | Closing cone |
Cited By (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP2724976A3 (en) * | 2012-10-29 | 2014-12-24 | Krones AG | Capper for containers |
| EP2730533A2 (en) * | 2012-11-09 | 2014-05-14 | Krones AG | Device for applying a closure to a container |
| EP2730533A3 (en) * | 2012-11-09 | 2014-12-03 | Krones AG | Device for applying a closure to a container |
| IT201700047818A1 (en) * | 2017-05-03 | 2018-11-03 | Arol Spa | CAPPING HEAD FOR APPLICATION OF CAPSULES ON CONTAINERS OR BOTTLES |
| WO2018203244A1 (en) * | 2017-05-03 | 2018-11-08 | Arol S.P.A. | Capping head for the application of caps on containers or bottles |
| EP3828127A1 (en) * | 2019-11-29 | 2021-06-02 | KRONES Aktiengesellschaft | Closing device for closing containers |
Also Published As
| Publication number | Publication date |
|---|---|
| DE102011005306A1 (en) | 2012-09-13 |
| CN102674219A (en) | 2012-09-19 |
| EP2497744A3 (en) | 2013-07-24 |
| CN102674219B (en) | 2015-02-11 |
| SI2497744T1 (en) | 2015-04-30 |
| US20120227355A1 (en) | 2012-09-13 |
| EP2497744B1 (en) | 2014-12-24 |
| US9388031B2 (en) | 2016-07-12 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP2497744B1 (en) | Locking tool | |
| EP1924515B1 (en) | Gripper for containers | |
| EP2138431B1 (en) | Exchangeable grip element for transporting containers | |
| DE102009025907A1 (en) | Apparatus and method for treating containers | |
| EP3505469A2 (en) | Active clamping device | |
| WO2017182453A1 (en) | Closure head for closing a container having a container closure | |
| DE102008022848A1 (en) | PET bottle grippers | |
| DE112012005690T5 (en) | Gripping device with breakpoints | |
| EP3433189A1 (en) | Gripping apparatus and transporting device for transporting containers | |
| DE102008055618A1 (en) | Clamp for gripping bottlenecks, in particular PET bottles | |
| EP3658478A1 (en) | Device for holding a container and treatment device | |
| DE602005004269T2 (en) | VALVE WITH MAGNETIC CONTROL UNIT | |
| EP2631190B1 (en) | Gripping device | |
| EP1574460A1 (en) | Device for transporting bottles and similar containers | |
| DE102014103181A1 (en) | Closure device with status display | |
| WO2015169865A1 (en) | Filling needle for filling a container with a fluid | |
| DE102014210401A1 (en) | Plug setting tool | |
| EP3919419A1 (en) | Device for holding a container and container treatment device | |
| EP1761434B1 (en) | Device and method for attaching spray pumps or similar items to containers and for locking said pumps | |
| WO2020229067A1 (en) | Apparatus for sterile transfer of material between a container and an isolator | |
| WO2018197068A1 (en) | Apparatus for transporting containers | |
| DE19740892A1 (en) | Transport star for bottles with clamp device which can be quickly and reliably opened and closed | |
| EP0597868B1 (en) | Device for introducing objects into, and removing them from a machine | |
| DE102018203788A1 (en) | Device for gripping at least one object, in particular a pharmaceutical container | |
| DE102009003649A1 (en) | Treatment device i.e. labeling device, for e.g. bottle storing beverage, has holding device holding, gripping and/or rotating upper mouth and/or neck region, and actuator lifting, lowering and/or fixing holding device in positions |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| AK | Designated contracting states |
Kind code of ref document: A2 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| AX | Request for extension of the european patent |
Extension state: BA ME |
|
| PUAL | Search report despatched |
Free format text: ORIGINAL CODE: 0009013 |
|
| AK | Designated contracting states |
Kind code of ref document: A3 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| AX | Request for extension of the european patent |
Extension state: BA ME |
|
| RIC1 | Information provided on ipc code assigned before grant |
Ipc: B67B 3/20 20060101AFI20130620BHEP |
|
| 17P | Request for examination filed |
Effective date: 20140122 |
|
| RBV | Designated contracting states (corrected) |
Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| GRAP | Despatch of communication of intention to grant a patent |
Free format text: ORIGINAL CODE: EPIDOSNIGR1 |
|
| INTG | Intention to grant announced |
Effective date: 20140903 |
|
| GRAS | Grant fee paid |
Free format text: ORIGINAL CODE: EPIDOSNIGR3 |
|
| GRAA | (expected) grant |
Free format text: ORIGINAL CODE: 0009210 |
|
| AK | Designated contracting states |
Kind code of ref document: B1 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| REG | Reference to a national code |
Ref country code: GB Ref legal event code: FG4D Free format text: NOT ENGLISH |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: EP |
|
| REG | Reference to a national code |
Ref country code: IE Ref legal event code: FG4D Free format text: LANGUAGE OF EP DOCUMENT: GERMAN |
|
| REG | Reference to a national code |
Ref country code: AT Ref legal event code: REF Ref document number: 703013 Country of ref document: AT Kind code of ref document: T Effective date: 20150115 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R096 Ref document number: 502012001877 Country of ref document: DE Effective date: 20150219 |
|
| REG | Reference to a national code |
Ref country code: NL Ref legal event code: VDEP Effective date: 20141224 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: FI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20141224 Ref country code: NO Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150324 Ref country code: LT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20141224 |
|
| REG | Reference to a national code |
Ref country code: LT Ref legal event code: MG4D |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: RS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20141224 Ref country code: GR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150325 Ref country code: HR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20141224 Ref country code: LV Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20141224 Ref country code: SE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20141224 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: NL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20141224 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: RO Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20141224 Ref country code: CZ Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20141224 Ref country code: EE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20141224 Ref country code: ES Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20141224 Ref country code: SK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20141224 |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: PL |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150424 Ref country code: LU Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150120 Ref country code: PL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20141224 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R097 Ref document number: 502012001877 Country of ref document: DE |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MC Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20141224 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: CH Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20150131 Ref country code: LI Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20150131 Ref country code: DK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20141224 |
|
| PLBE | No opposition filed within time limit |
Free format text: ORIGINAL CODE: 0009261 |
|
| REG | Reference to a national code |
Ref country code: IE Ref legal event code: MM4A |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: NO OPPOSITION FILED WITHIN TIME LIMIT |
|
| 26N | No opposition filed |
Effective date: 20150925 |
|
| REG | Reference to a national code |
Ref country code: FR Ref legal event code: PLFP Year of fee payment: 5 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20150120 |
|
| GBPC | Gb: european patent ceased through non-payment of renewal fee |
Effective date: 20160120 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: GB Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20160120 |
|
| REG | Reference to a national code |
Ref country code: FR Ref legal event code: PLFP Year of fee payment: 6 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20141224 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SM Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20141224 Ref country code: HU Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT; INVALID AB INITIO Effective date: 20120120 Ref country code: BG Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20141224 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: CY Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20141224 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: PT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150424 Ref country code: BE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20150131 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: TR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20141224 |
|
| REG | Reference to a national code |
Ref country code: FR Ref legal event code: PLFP Year of fee payment: 7 |
|
| REG | Reference to a national code |
Ref country code: AT Ref legal event code: MM01 Ref document number: 703013 Country of ref document: AT Kind code of ref document: T Effective date: 20170120 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: AT Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20170120 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20141224 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: AL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20141224 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: SI Payment date: 20221214 Year of fee payment: 12 Ref country code: IT Payment date: 20221213 Year of fee payment: 12 Ref country code: DE Payment date: 20221130 Year of fee payment: 12 |
|
| P01 | Opt-out of the competence of the unified patent court (upc) registered |
Effective date: 20230523 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: FR Payment date: 20231212 Year of fee payment: 13 |