EP2455544A2 - Soil or pavement milling machine and method for milling soils or traffic surfaces - Google Patents
Soil or pavement milling machine and method for milling soils or traffic surfaces Download PDFInfo
- Publication number
- EP2455544A2 EP2455544A2 EP20110189602 EP11189602A EP2455544A2 EP 2455544 A2 EP2455544 A2 EP 2455544A2 EP 20110189602 EP20110189602 EP 20110189602 EP 11189602 A EP11189602 A EP 11189602A EP 2455544 A2 EP2455544 A2 EP 2455544A2
- Authority
- EP
- European Patent Office
- Prior art keywords
- milling
- milling device
- travel
- hood
- machine
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 238000003801 milling Methods 0.000 title claims abstract description 157
- 239000002689 soil Substances 0.000 title claims abstract description 46
- 238000000034 method Methods 0.000 title claims abstract description 14
- 230000002441 reversible effect Effects 0.000 claims abstract description 16
- 238000002156 mixing Methods 0.000 claims abstract description 13
- 239000000203 mixture Substances 0.000 claims description 22
- 238000003971 tillage Methods 0.000 claims description 21
- 239000000463 material Substances 0.000 claims description 16
- 238000009825 accumulation Methods 0.000 claims description 7
- 230000001360 synchronised effect Effects 0.000 claims description 4
- 230000000630 rising effect Effects 0.000 claims description 3
- 238000003754 machining Methods 0.000 claims description 2
- 230000003247 decreasing effect Effects 0.000 claims 1
- 230000035508 accumulation Effects 0.000 description 6
- 230000033001 locomotion Effects 0.000 description 6
- 230000006870 function Effects 0.000 description 3
- 239000011230 binding agent Substances 0.000 description 2
- 230000008859 change Effects 0.000 description 2
- 238000005056 compaction Methods 0.000 description 2
- 238000006073 displacement reaction Methods 0.000 description 2
- 238000011049 filling Methods 0.000 description 2
- 230000013011 mating Effects 0.000 description 2
- 238000007789 sealing Methods 0.000 description 2
- 239000003381 stabilizer Substances 0.000 description 2
- 239000000725 suspension Substances 0.000 description 2
- 239000010426 asphalt Substances 0.000 description 1
- 238000009412 basement excavation Methods 0.000 description 1
- 230000008901 benefit Effects 0.000 description 1
- 230000005540 biological transmission Effects 0.000 description 1
- 238000002485 combustion reaction Methods 0.000 description 1
- 238000010276 construction Methods 0.000 description 1
- 230000001419 dependent effect Effects 0.000 description 1
- 238000007730 finishing process Methods 0.000 description 1
- 230000008569 process Effects 0.000 description 1
- 238000010298 pulverizing process Methods 0.000 description 1
- 238000004064 recycling Methods 0.000 description 1
- 230000009467 reduction Effects 0.000 description 1
- 230000006641 stabilisation Effects 0.000 description 1
- 238000011105 stabilization Methods 0.000 description 1
Images

Classifications
-
- E—FIXED CONSTRUCTIONS
- E01—CONSTRUCTION OF ROADS, RAILWAYS, OR BRIDGES
- E01C—CONSTRUCTION OF, OR SURFACES FOR, ROADS, SPORTS GROUNDS, OR THE LIKE; MACHINES OR AUXILIARY TOOLS FOR CONSTRUCTION OR REPAIR
- E01C21/00—Apparatus or processes for surface soil stabilisation for road building or like purposes, e.g. mixing local aggregate with binder
-
- E—FIXED CONSTRUCTIONS
- E01—CONSTRUCTION OF ROADS, RAILWAYS, OR BRIDGES
- E01C—CONSTRUCTION OF, OR SURFACES FOR, ROADS, SPORTS GROUNDS, OR THE LIKE; MACHINES OR AUXILIARY TOOLS FOR CONSTRUCTION OR REPAIR
- E01C23/00—Auxiliary devices or arrangements for constructing, repairing, reconditioning, or taking-up road or like surfaces
- E01C23/06—Devices or arrangements for working the finished surface; Devices for repairing or reconditioning the surface of damaged paving; Recycling in place or on the road
- E01C23/065—Recycling in place or on the road, i.e. hot or cold reprocessing of paving in situ or on the traffic surface, with or without adding virgin material or lifting of salvaged material; Repairs or resurfacing involving at least partial reprocessing of the existing paving
-
- E—FIXED CONSTRUCTIONS
- E01—CONSTRUCTION OF ROADS, RAILWAYS, OR BRIDGES
- E01C—CONSTRUCTION OF, OR SURFACES FOR, ROADS, SPORTS GROUNDS, OR THE LIKE; MACHINES OR AUXILIARY TOOLS FOR CONSTRUCTION OR REPAIR
- E01C23/00—Auxiliary devices or arrangements for constructing, repairing, reconditioning, or taking-up road or like surfaces
- E01C23/06—Devices or arrangements for working the finished surface; Devices for repairing or reconditioning the surface of damaged paving; Recycling in place or on the road
- E01C23/08—Devices or arrangements for working the finished surface; Devices for repairing or reconditioning the surface of damaged paving; Recycling in place or on the road for roughening or patterning; for removing the surface down to a predetermined depth high spots or material bonded to the surface, e.g. markings; for maintaining earth roads, clay courts or like surfaces by means of surface working tools, e.g. scarifiers, levelling blades
- E01C23/085—Devices or arrangements for working the finished surface; Devices for repairing or reconditioning the surface of damaged paving; Recycling in place or on the road for roughening or patterning; for removing the surface down to a predetermined depth high spots or material bonded to the surface, e.g. markings; for maintaining earth roads, clay courts or like surfaces by means of surface working tools, e.g. scarifiers, levelling blades using power-driven tools, e.g. vibratory tools
- E01C23/088—Rotary tools, e.g. milling drums
Definitions
- the invention relates to a soil cultivation machine for milling soil or traffic surfaces according to the preamble of claim 1 or a method for milling soil or traffic areas with a soil cultivation machine according to the preamble of claim 10.
- Such construction machines are used for material processing, namely, for example, the stabilization of unsuitable soils, the pulverization of asphalt floors, or the recycling of bound or unbound road surfaces.
- a powdery binder into the soil in order to increase its ability to be installed and its carrying capacity.
- the known tillage machines have a rotating in a mixing chamber milling drum, which is arranged vertically adjustable under the milling drum enclosing, fixed to the machine frame hood.
- the tillage machine can be self-propelled. Examples of such machines are in the WO 96/24725 , of the WO 2005/054578 or the EP 2218823 A described.
- the necessary processes take place, adapted to the respective application, such as e.g. Removal and crushing of the milled roadway material, addition of binders, mixing and distribution of added materials, etc.
- Such machines are often equipped with a closed control station.
- the control station is preferably arranged forward in the direction of travel, in newer machines even on or in front of the front axle. Due to the position of the control station an observation of the milling device from the driver's station is not possible, especially because the hood completely surrounds the milling device and rests on the ground surface.
- the mix is swirled around in the mixing chamber, so that when stopping the milling drum each settles a larger amount of mix before and behind the milling drum.
- a recess approximately 40% deep of the milling drum diameter remains at the location where the milling drum was located and over the entire length of the milling drum , according to the working width of the tillage machine extends.
- the invention is therefore an object of the invention to provide a soil tillage machine for milling of soils, as well as a method for milling of soils in which at the end of the milling process, the processed soil surface can be left in a substantially flat state.
- the invention advantageously provides that a control for terminating the milling operation controls the milling depth of the milling device with simultaneous coordinated forward or reverse travel along a predetermined trajectory, whereby the milling device can be moved out into the out-of-ground upper position, without any of the Retracting the milling device resulting recess in the processed soil surface remains.
- the lifting movement for reducing the cutting depth is controlled synchronized with the driving movement that the mixed material volume located in the direction of travel before the milling device is pushed by the hood into the recess, wherein together with the supplied by the rotary movement of the milling device from the mixing chamber Mischgutvolumen the depression in the is gradually completely filled by the lifting movement of the milling device gradually released space.
- the recess which is released when the milling device is moved out should be filled with the mixture. It is understandable that an absolute flatness is not achievable, but the well is filled with mix so that no significant bumps remain.
- the driver Upon completion of the milling operation, the driver issues a signal to the controller, which then controls the milling depth of the milling device while simultaneously advancing or reversing the tillage machine along a predetermined trajectory to complete the milling operation.
- the trajectory can be stored, for example, in the controller and coordinates the retraction of the milling device while driving the soil tillage machine in such a way that the milling device can be moved into the upper position out of the ground engaging while at the same time when moving out the milling device freed depression is closed in the processed soil surface.
- the height adjustment of the milling device takes place simultaneously with forward or reverse travel, such that the Mischgutanophenouracil located in front and behind the milling in the direction of travel are successively conveyed into the increasingly released by the retraction of the milling depression.
- the predetermined by the controller trajectory when lifting the milling device can be determined empirically and possibly deposited for different soil conditions in the controller in a memory. Therefore, the controller according to the invention causes the vehicle driver does not have to worry about retracting the milling device, but only tells the controller when the milling is to be stopped, so that the driver can focus solely on driving and steering the tillage machine.
- the operation of the soil tillage machine is facilitated for the driver, because it can focus on the driving and a possible position change of the machine, without having to coordinate the excavation of the milling device at the same time.
- the control along the trajectory means that e.g. the axis of rotation of the milling device or, alternatively, the deepest point of engagement of the milling device when lifting such a trajectory follows.
- control controls the milling depth of the milling device along a predetermined trajectory depending on the direction of travel of the machine frame trajectory.
- the controller synchronizes the path of the height adjustment of the milling device with the path in the direction of travel.
- Such a control has the advantage that it is independent of the driving speed and ensures that the trajectory for the height adjustment of the milling device is maintained at each driving speed.
- control for terminating the milling operation additionally controls the position of at least one hood flap.
- the amount of mixed material can be controlled, which is subtracted to close the released by moving out of the milling device recess.
- the flap position of the trailing flap in the direction of travel hood flap can be controlled to a height that takes into account the increase in volume of the mix due to its loosening during milling.
- the milling of the soil causes a loosening, which leads to an increase in volume of the mixed material, so that the trailing hood flap, which acts as a scraper, can not be moved to the original height of the soil surface, but preferably with a distance from the ground, the Volume increase of the mix taken into account.
- control can, as already stated, depending on the nature of the ground hold different trajectories for selection by the driver, which also contain material-dependent control values for the position of the hood flaps whose lower edge determines the wiping height above the ground.
- the predetermined trajectory of the control to terminate the milling and the successive reduction of the milling depth can be degressive rising.
- the predetermined trajectory of the control for terminating the milling operation essentially has the course of an asymptotic function, in particular an arctan function.
- the tillage machine may be provided with a height-adjustable machine frame. It can additionally be provided that the controller additionally raises the machine frame after completion of the finishing process of the milling, so that the tillage machine receives more ground clearance and can be easily moved to another processing point.
- the machinist reverses the direction of travel of the machine frame to complete the milling operation.
- the controller registers the selected direction of travel and controls the correct, depending on the direction of travel. the rear in the direction of travel or the trailing hood flap.
- the now in the direction of travel rear hood flap is used as a scraper whose Abstreifiere is adjustable by the controller.
- the invention also relates to a method for milling soil with a soil cultivation machine having the features of claim 10.
- the method according to the invention provides i.a. Also, to close the remaining with moving out of the milling device depression with mixed material on the one hand from the direction in the rear hood flap smeared mix and on the other hand of the moved along along the predetermined by the control trajectory milling device removed and conveyed into the recess mix is used.
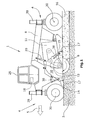
- Fig. 1 shows the tillage machine 1 for milling floors and roads with a supported by trolleys 4 machine frame 6 and consisting of a cab 26 control station.
- the driver's cab 26 is displaceable on the machine frame transversely to the direction of travel.
- the seat in the control station can be turned 180 ° for reversing.
- Fig. 1 apparent tillage machine 1 is from the WO 96/24725 known.
- the technical solutions described in the context of this application are also applicable to stabilizers or recyclers, as for example from the WO 2005/054578 or the EP 2218823 A are known.
- the trolleys 4 have at the front and rear end of the machine frame 6 two common or optionally individually steerable suspension axles 30.
- Each wheel of the chassis 4 is provided with a lifting column 28, so that the height of the machine frame 6 and possibly its inclination is exactly adjustable to working or transport height.
- hood 10 which surrounds the milling device 8, in particular a milling drum, and forms a mixing chamber 12 for the processed mix 16 between the milling device 8 and hood 10 ,
- the milling device 8 can be lowered by means of a height adjustment device 20 to a set milling depth or be moved out of the processed soil 2 after completion of the milling.
- the hood 10 may be fixedly attached to the machine frame 6 and has at its front and rear in the direction of travel 5 via actuators 36,38 pivotable hood flaps 14,15, which complete the mixing chamber 12 of the hood 10 against the bottom surface 3 of the bottom 2 as needed ,
- the hood may be suspended from chains on the machine frame, i. In operation, the hood 10 slides on the chains hanging over the ground. If you drive the milling drum to zero milling depth, then the hood 10 is still on the bottom surface 3. If you drive the milling drum even higher, then it takes the hood 10 and thus lifts the hood 10 from the ground.
- the pivotable hood flaps 14, 15 may be additionally provided, for sealing and sealing with respect to the floor surface 3, by a flexible strip 17, e.g. a rubber lip, be provided.
- the milling drum 8 is mounted in a pivoting device 11 which is pivotally mounted on the machine frame 6, wherein the Fräswalzenachse 32 and the output axis of the Fräswalzenantriebs can be pivoted in a slot 19 in the side walls of the hood 10 to allow the routing depth adjustment.
- the height adjustment of the milling device 8 can also be done in other ways, eg as in the WO 2005/054578 described.
- the milling drum drive is preferably a mechanical drive, e.g. is driven by a combustion engine via a belt transmission.
- Fig. 2 schematically shows the situation when counter-milling in forward drive 5.
- mix 16 is formed both before and behind the milling drum 8 a accumulation of material 19,21 of mix 16. Since the mix 16 against the Floor 2 is loosened, have the Mischgutophenouracil 19,21 before and behind the milling device 8 slightly more volume than the recess 22 in which the milling device 8 operates during milling.
- How out Fig. 2 can be raised when driving forward 5, the front hood flap 14 and the rear hood in the direction of travel 15 be lowered to strip the recycled mix 16 at a preset height.
- the soil working machine 1 has a control 18, which automatically controls the cutting depth of the milling device 8 with simultaneous forward or reverse travel 5,7 to complete the milling.
- the driver only has to give an appropriate command to the controller 18, so that the controller 18 can control the height adjustment device 20 to finish the milling.
- the control takes place along a predetermined trajectory 24, which may be stored in the controller 18, so that the Milling device 8 in the out-of-ground upper position 9 in Fig. 3 can be moved out without a resulting from the retraction of the milling device 8 recess 22 remains in the processed soil surface 3.
- the trajectory 24 is in Fig. 3 as a connecting line of the positions of the axis of rotation 32 of the milling device designed as a milling 8 is shown.
- the controller 18 can also control the position of the hood flaps 14,15 in addition to the milling depth.
- Fig. 3 shows a degressively rising curve for the trajectory 24th Fig. 3 shows the situation in which the tillage machine 1 in forward drive 5 in the in Fig. 2 has been shown and then issued a command to stop the milling to the controller 18.
- the milling device 9 then makes the in Fig. 3 apparent movement corresponding to the trajectory 24 in reverse 7, the then trailing hood flap 14 is used as stripping, the Abstreifschreib is set by the controller 18, so that the rear now in the direction of travel hood flap 14 Mischgutanphaseufitch 19 pushes into the recess 22.
- the front hood flap 15 in the direction of travel is, as already in Fig. 2 shown raised to the dashed position, so that it does not form a new accumulation in reverse 7, but it allows the milling drum milled off this accumulation 21 during the reverse drive 7 and thus spends in the recess 22.
- the trajectory 24 may also be in the form of an asymptote, e.g. in the form of an arctan function, however, the shape of the trajectory 24 is not limited thereto.
- the controller 18 synchronizes the path of the height adjustment via the height adjustment device 20 with the path in the direction of travel (forward drive 5 or reverse drive 7).
- the trajectories 24 for filling the recess 22 in the case of synchronous milling or when moving out in forward travel 5 run differently than in Fig. 3 shown. If the milling device 8, the recess 22 in forward motion leaves, then the rear flap in the direction of travel 15 assumes the predetermined by the controller 18 Abstreiffunktion, as in Fig. 4 shown.
- the path that is required to fill the recess 22 is about 1 to 3 diameter of the milling drum.
- Different trajectories 24 may be stored in the controller 18 for different ground materials and for retracting forward or reverse travel.
- each trailing hood flap 14,15 can be adjusted by the controller 18 via actuators 36,38 to a level that takes into account the increase in volume of the mix 16 due to its loosening during milling.
- These control values can also be stored in the controller 18 in a material-specific manner together with the trajectory 24.
- the recess 22 is filled with mix 16 with the same degree of loosening, as it has arisen during the entire milling of a milling track.
- the milling can be completed without leaving depressions 22 and mixed material accumulations 19, 21 and without leaving any differences in the degree of loosening in the machined surface.
- This is essential for the subsequent processing of the soil surface 3 with compaction machines, as well as for the later road surface application machines that apply a road or road surface on the compacted soil surface 3. Namely, if there are significant density differences in the recycled mix 16, these will be e.g. possibly even enhanced by the subsequent compaction machines, so that a subsequently applied road surface has unevenness at the corresponding points.
Landscapes
- Engineering & Computer Science (AREA)
- Architecture (AREA)
- Civil Engineering (AREA)
- Structural Engineering (AREA)
- Mining & Mineral Resources (AREA)
- Mechanical Engineering (AREA)
- Road Repair (AREA)
Abstract
Description
Die Erfindung betrifft eine Bodenbearbeitungsmaschine zum Fräsen von Böden oder Verkehrsflächen nach dem Oberbegriff des Anspruchs 1 bzw. ein Verfahren zum Fräsen von Böden oder Verkehrsflächen mit einer Bodenbearbeitungsmaschine nach dem Oberbegriff des Anspruchs 10.The invention relates to a soil cultivation machine for milling soil or traffic surfaces according to the preamble of
Derartige Baumaschinen, auch Stabilisierer oder Recycler genannt, werden für die Materialaufbereitung, nämlich z.B. das Stabilisieren ungenügend tragfähiger Böden, das Pulverisieren von Asphaltdecken bis hin zum Recyceln von gebunden oder ungebundenen Fahrbahnoberflächen verwendet. Zur Verbesserung oder Verfestigung von Böden ist es bekannt, ein pulverförmiges Bindemittel in den Boden einzubringen, um dessen Einbaufähigkeit und Tragfähigkeit zu erhöhen. Die bekannten Bodenbearbeitungsmaschinen weisen eine in einem Mischraum umlaufende Fräswalze auf, die höhenverstellbar unter einer die Fräswalze umschließenden, am Maschinenrahmen befestigten Haube angeordnet ist. Die Bodenbearbeitungsmaschine kann selbstfahrend sein. Beispiele derartiger Maschinen sind in der
Hinsichtlich der Beschreibung der einzelnen Komponenten einer solchen Bodenbearbeitungsmaschine wird auf diese früheren Patentanmeldungen Bezug genommen.With regard to the description of the individual components of such a tillage machine, reference is made to these earlier patent applications.
In dem zwischen Haube und Fräseinrichtung befindlichen Mischraum finden, angepasst an die jeweilige Anwendung, die notwendigen Prozesse statt, wie z.B. Ablösen und Zerkleinern des abgefrästen Fahrbahnmaterials, Zugabe von Bindemitteln, Vermischen und Verteilen von zugesetzten Materialien usw.In the mixing space between the hood and the milling device, the necessary processes take place, adapted to the respective application, such as e.g. Removal and crushing of the milled roadway material, addition of binders, mixing and distribution of added materials, etc.
Derartige Maschinen sind häufig mit einem geschlossenen Fahrstand ausgerüstet. Der Fahrstand ist vorzugsweise in Fahrtrichtung vorne angeordnet, bei neueren Maschinen sogar auf oder vor der Vorderachse. Aufgrund der Position des Fahrstandes ist eine Beobachtung der Fräseinrichtung vom Fahrerstand nicht möglich, insbesondere auch weil die Haube die Fräseinrichtung vollständig umschließt und auf der Bodenoberfläche aufliegt.Such machines are often equipped with a closed control station. The control station is preferably arranged forward in the direction of travel, in newer machines even on or in front of the front axle. Due to the position of the control station an observation of the milling device from the driver's station is not possible, especially because the hood completely surrounds the milling device and rests on the ground surface.
Bei dem Fräsprozess wird das Mischgut in der Mischkammer herumgewirbelt, so dass beim Stoppen der Fräswalze sich jeweils eine größere Menge Mischgut vor und hinter der Fräswalze absetzt. Wird nunmehr die Fräswalze angehoben, um außer Eingriff mit dem Boden zu sein, verbleibt an der Stelle, an der sich die Fräswalze befunden hat, eine Vertiefung, die in etwa eine Tiefe von 40 % des Fräswalzendurchmessers aufweist und sich über die gesamte Länge der Fräswalze, entsprechend der Arbeitsbreite der Bodenbearbeitungsmaschine erstreckt.In the milling process, the mix is swirled around in the mixing chamber, so that when stopping the milling drum each settles a larger amount of mix before and behind the milling drum. Now, when the milling drum is raised to be out of engagement with the ground, a recess approximately 40% deep of the milling drum diameter remains at the location where the milling drum was located and over the entire length of the milling drum , according to the working width of the tillage machine extends.
Wird beispielsweise eine größere Fläche in der Größe eines Fußballfeldes mit mehreren Fahrspuren bearbeitet, verbleiben an den Umkehrpunkten jeder Fahrspur derartige Mischgutanhäufungen bzw. Vertiefungen, die manuell oder mit einem Planiergerät geglättet werden müssen. Mit anderen Worten, jedes Mal, wenn der Fräsprozess unterbrochen werden muss, weil die Bodenbearbeitungsmaschine zur nächsten Fahrspur oder zu einer anderen Bearbeitungsstelle verfahren werden muss, besteht das Problem, dass durch das Herausfahren der Fräswalze die bearbeitete Bodenoberfläche im nicht ebenen Zustand verlassen wird. Erschwerend kommt hinzu, dass der Fahrzeugführer die Bearbeitungsstelle nicht beobachten kann.For example, if a larger area is processed in the size of a football field with multiple lanes, remain at the turning points of each lane of such Mischgutanhumpungen or depressions that need to be smoothed manually or with a grader. In other words, every time the milling process has to be interrupted, because the tillage machine has to be moved to the next lane or to another processing site, there is the problem that leaving the milling drum moves out of the processed soil surface in an uneven state. To make matters worse, that the driver can not observe the processing station.
Der Erfindung liegt daher die Aufgabe zugrunde, eine Bodenbearbeitungsmaschine zum Fräsen von Böden, sowie ein Verfahren zum Fräsen von Böden anzugeben, bei denen bei Beendigung des Fräsprozesses die bearbeitete Bodenoberfläche in einem im wesentlichen ebenen Zustand hinterlassen werden kann.The invention is therefore an object of the invention to provide a soil tillage machine for milling of soils, as well as a method for milling of soils in which at the end of the milling process, the processed soil surface can be left in a substantially flat state.
Zur Lösung dieser Aufgabe dienen die Merkmale der Ansprüche 1 und 10.To achieve this object, the features of
Die Erfindung sieht in vorteilhafter Weise vor, dass eine Steuerung zum Beenden der Fräsbearbeitung die Frästiefe der Fräseinrichtung bei gleichzeitiger koordinierter Vorwärts- oder Rückwärtsfahrt entlang einer vorgegebenen Bahnkurve steuert, wodurch die Fräseinrichtung in die außer Bodeneingriff befindliche obere Position herausfahrbar ist, ohne dass eine aus dem Herausfahren der Fräseinrichtung resultierende Vertiefung in der bearbeiteten Bodenoberfläche verbleibt.The invention advantageously provides that a control for terminating the milling operation controls the milling depth of the milling device with simultaneous coordinated forward or reverse travel along a predetermined trajectory, whereby the milling device can be moved out into the out-of-ground upper position, without any of the Retracting the milling device resulting recess in the processed soil surface remains.
Die Hubbewegung zur Reduzierung der Frästiefe wird dabei mit der Fahrbewegung synchronisiert gesteuert, dass das in Fahrbewegungsrichtung vor der Fräseinrichtung befindliche Mischgutvolumen von der Haube in die Vertiefung geschoben wird, wobei zusammen mit dem durch die Drehbewegung der Fräseinrichtung aus dem Mischraum zugeführte Mischgutvolumen die Vertiefung in dem durch die Hubbewegung der Fräseinrichtung sukzessive freiwerdenden Raum im wesentlichen vollständig ausgefüllt wird.The lifting movement for reducing the cutting depth is controlled synchronized with the driving movement that the mixed material volume located in the direction of travel before the milling device is pushed by the hood into the recess, wherein together with the supplied by the rotary movement of the milling device from the mixing chamber Mischgutvolumen the depression in the is gradually completely filled by the lifting movement of the milling device gradually released space.
Insbesondere soll die beim Herausfahren der Fräseinrichtung freiwerdende Vertiefung mit Mischgut gefüllt werden. Dabei ist verständlich, dass eine absolute Planheit nicht erreichbar ist, allerdings wird die Vertiefung mit Mischgut ausgefüllt, so dass keine wesentlichen Unebenheiten verbleiben.In particular, the recess which is released when the milling device is moved out should be filled with the mixture. It is understandable that an absolute flatness is not achievable, but the well is filled with mix so that no significant bumps remain.
Bei Beendigung der Fräsbearbeitung gibt der Fahrzeugführer ein Signal an die Steuerung, die dann zum Beenden der Fräsbearbeitung die Frästiefe der Fräseinrichtung bei gleichzeitiger Vorwärts- oder Rückwärtsfahrt der Bodenbearbeitungsmaschine entlang einer vorgegebenen Bahnkurve steuert. Die Bahnkurve kann beispielsweise in der Steuerung abgespeichert sein und koordiniert das Herausfahren der Fräseinrichtung während der Fahrt der Bodenbearbeitungsmaschine in einer Weise, dass die Fräseinrichtung in die außer Bodeneingriff befindliche obere Position herausfahrbar ist und dabei gleichzeitig die beim Herausfahren der Fräseinrichtung freiwerdende Vertiefung in der bearbeiteten Bodenoberfläche verschlossen wird. Es ist hierzu erforderlich, dass die Höhenverstellung der Fräseinrichtung bei gleichzeitiger Vorwärts- oder Rückwärtsfahrt koordiniert erfolgt, derart, dass die in Fahrtrichtung vor und hinter der Fräseinrichtung befindlichen Mischgutanhäufungen sukzessive in die zunehmend durch das Herausfahren der Fräseinrichtung freiwerdende Vertiefung befördert werden. Die von der Steuerung vorgegebene Bahnkurve beim Anheben der Fräseinrichtung kann empirisch ermittelt werden und ggf. für unterschiedliche Bodenbeschaffenheiten in der Steuerung in einem Speicher hinterlegt werden. Die erfindungsgemäße Steuerung bewirkt daher, dass der Fahrzeugführer sich nicht um das Herausfahren der Fräseinrichtung kümmern muss, sondern lediglich der Steuerung mitteilt, wann die Fräsbearbeitung beendet werden soll, so dass der Fahrzeugführer sich allein auf das Fahren und Lenken der Bodenbearbeitungsmaschine konzentrieren kann. Dadurch, dass an den Stellen, an denen die Bodenbearbeitungsmaschine gewendet werden muss, oder auf eine andere Fahrspur wechseln muss, keine unerwünschten Vertiefungen und Überhöhungen der bearbeiteten Bodenoberfläche verbleiben, entfällt eine Nachbearbeitung der bearbeiteten Böden oder Bodenflächen. Durch das automatische Auffüllen der Vertiefung mit bereits abgearbeitetem Mischgut wird auch gewährleistet, dass im Bereich der Vertiefung bei Beendigung der Fräsbearbeitung keine Dichteunterschiede zu dem in der kontinuierlichen Fräsbearbeitung aufgelockerten Boden bestehen.Upon completion of the milling operation, the driver issues a signal to the controller, which then controls the milling depth of the milling device while simultaneously advancing or reversing the tillage machine along a predetermined trajectory to complete the milling operation. The trajectory can be stored, for example, in the controller and coordinates the retraction of the milling device while driving the soil tillage machine in such a way that the milling device can be moved into the upper position out of the ground engaging while at the same time when moving out the milling device freed depression is closed in the processed soil surface. It is necessary for this purpose that the height adjustment of the milling device takes place simultaneously with forward or reverse travel, such that the Mischgutanhäufungen located in front and behind the milling in the direction of travel are successively conveyed into the increasingly released by the retraction of the milling depression. The predetermined by the controller trajectory when lifting the milling device can be determined empirically and possibly deposited for different soil conditions in the controller in a memory. Therefore, the controller according to the invention causes the vehicle driver does not have to worry about retracting the milling device, but only tells the controller when the milling is to be stopped, so that the driver can focus solely on driving and steering the tillage machine. The fact that at the points where the tillage machine must be reversed, or change to another lane, no unwanted depressions and elevations of the machined soil surface remain, eliminates a reworking of the processed soil or ground surfaces. The automatic filling of the recess with already processed mix also ensures that in the area of the depression at the end of milling no density differences to the loosened up in the continuous milling machining soil exist.
Die Bedienung der Bodenbearbeitungsmaschine wird für den Fahrzeugführer erleichtert, weil der sich auf den Fahrbetrieb und einen eventuellen Positionswechsel der Maschine konzentrieren kann, ohne gleichzeitig die Aushubbewegung der Fräseinrichtung koordinieren zu müssen.The operation of the soil tillage machine is facilitated for the driver, because it can focus on the driving and a possible position change of the machine, without having to coordinate the excavation of the milling device at the same time.
Die Steuerung entlang der Bahnkurve bedeutet, dass z.B. die Drehachse der Fräseinrichtung oder alternativ auch die tiefste Eingriffsstelle der Fräseinrichtung beim Anheben einer solchen Bahnkurve folgt.The control along the trajectory means that e.g. the axis of rotation of the milling device or, alternatively, the deepest point of engagement of the milling device when lifting such a trajectory follows.
Vorzugsweise ist vorgesehen, dass die Steuerung die Frästiefe der Fräseinrichtung entlang einer in Abhängigkeit von der Fahrtrichtung des Maschinenrahmens vorgegebenen Bahnkurve steuert.Preferably, it is provided that the control controls the milling depth of the milling device along a predetermined trajectory depending on the direction of travel of the machine frame trajectory.
Hinsichtlich der Drehrichtung unterscheidet man einen Gegenlauf-Fräsprozess und einen Gleichlauf-Fräsprozess je nachdem, ob die Drehrichtung der Fräseinrichtung und die Drehrichtung der Räder der Bodenbearbeitungsmaschine entgegengesetzt oder in gleicher Drehrichtung verläuft. Insofern können in der Steuerung unterschiedliche Bahnkurven in Abhängigkeit von der Fahrtrichtung des Maschinenrahmens und der Art der Fräseinrichtung hinterlegt sein.With regard to the direction of rotation, a distinction is made between a counterboring milling process and a synchronous milling process, depending on whether the direction of rotation of the milling device and the direction of rotation of the wheels of the soil cultivation machine are opposite or in the same direction of rotation. In this respect, different trajectories depending on the direction of travel of the machine frame and the type of milling device can be stored in the control.
Nach einem bevorzugten Ausführungsbeispiel ist vorgesehen, dass die Steuerung den Weg der Höhenverstellung der Fräseinrichtung mit dem Weg in Fahrtrichtung synchronisiert. Eine derartige Steuerung hat den Vorteil, dass sie unabhängig von der Fahrgeschwindigkeit ist und dafür sorgt, dass die Bahnkurve für die Höhenverstellung der Fräseinrichtung bei jeder Fahrgeschwindigkeit eingehalten wird.According to a preferred embodiment, it is provided that the controller synchronizes the path of the height adjustment of the milling device with the path in the direction of travel. Such a control has the advantage that it is independent of the driving speed and ensures that the trajectory for the height adjustment of the milling device is maintained at each driving speed.
Bei einem besonders bevorzugten Ausführungsbeispiel ist vorgesehen, dass die Steuerung zum Beenden der Fräsbearbeitung zusätzlich die Stellung mindestens einer Haubenklappe steuert. Mit Hilfe der Haubenklappenstellung kann die Menge des Mischgutes gesteuert werden, die zum Schließen der durch das Herausfahren der Fräseinrichtung freiwerdenden Vertiefung abgezogen wird.In a particularly preferred embodiment, it is provided that the control for terminating the milling operation additionally controls the position of at least one hood flap. With the help of the hood flap position, the amount of mixed material can be controlled, which is subtracted to close the released by moving out of the milling device recess.
Besonders bevorzugt ist vorgesehen, dass die Klappenstellung der in Fahrtrichtung nachlaufenden Haubenklappe auf eine Höhe steuerbar ist, die die Volumenvergrößerung des Mischgutes aufgrund dessen Auflockerung bei der Fräsbearbeitung berücksichtigt. Durch die Fräsbearbeitung des Bodens entsteht eine Auflockerung, die zu einer Volumenvergrößerung des Mischgutes führt, so dass die nachlaufende Haubenklappe, die wie ein Abstreifschild wirkt, nicht auf der ursprünglichen Höhe der Bodenoberfläche bewegt werden kann, sondern vorzugsweise mit einem Abstand vom Boden, der die Volumenvergrößerung des Mischgutes berücksichtigt.Particularly preferably, it is provided that the flap position of the trailing flap in the direction of travel hood flap can be controlled to a height that takes into account the increase in volume of the mix due to its loosening during milling. The milling of the soil causes a loosening, which leads to an increase in volume of the mixed material, so that the trailing hood flap, which acts as a scraper, can not be moved to the original height of the soil surface, but preferably with a distance from the ground, the Volume increase of the mix taken into account.
Die Steuerung kann wie bereits ausgeführt, je nach Bodenbeschaffenheit unterschiedliche Bahnkurven zur Auswahl durch den Fahrzeugführer vorhalten, die auch materialabhängige Stellwerte für die Stellung der Haubenklappen enthalten, deren Unterkante die Abstreifhöhe über dem Boden bestimmt.The control can, as already stated, depending on the nature of the ground hold different trajectories for selection by the driver, which also contain material-dependent control values for the position of the hood flaps whose lower edge determines the wiping height above the ground.
Die vorgegebene Bahnkurve der Steuerung zum Beenden der Fräsbearbeitung und zur sukzessiven Verringerung der Frästiefe kann degressiv steigend verlaufen.The predetermined trajectory of the control to terminate the milling and the successive reduction of the milling depth can be degressive rising.
Bei einem Ausführungsbeispiel ist vorgesehen, dass die vorgegebene Bahnkurve der Steuerung zum Beenden der Fräsbearbeitung im Wesentlichen den Verlauf einer asymptotischen Funktion, insbesondere eine arctan-Funktion, aufweist.In one exemplary embodiment, it is provided that the predetermined trajectory of the control for terminating the milling operation essentially has the course of an asymptotic function, in particular an arctan function.
Die Bodenbearbeitungsmaschine kann mit einem höhenverstellbaren Maschinenrahmen versehen sein. Dabei kann zusätzlich vorgesehen sein, dass die Steuerung nach Abschluss des Beendigungsprozesses der Fräsbearbeitung zusätzlich den Maschinenrahmen anhebt, damit die Bodenbearbeitungsmaschine mehr Bodenfreiheit erhält und leichter zu einer anderen Bearbeitungsstelle verfahren werden kann.The tillage machine may be provided with a height-adjustable machine frame. It can additionally be provided that the controller additionally raises the machine frame after completion of the finishing process of the milling, so that the tillage machine receives more ground clearance and can be easily moved to another processing point.
Bei einem besonders bevorzugten Ausführungsbeispiel ist vorgesehen, dass der Maschinist zum Beenden der Fräsbearbeitung die Fahrtrichtung des Maschinenrahmens umkehrt. Die Steuerung registriert die gewählte Fahrtrichtung und steuert in Abhängigkeit davon die richtige, d.h. die in Fahrtrichtung hintere bzw. die nachlaufende Haubenklappe an. Die nunmehr in Fahrtrichtung hintere Haubenklappe wird als Abstreifer verwendet, dessen Abstreifhöhe von der Steuerung einstellbar ist.In a particularly preferred embodiment, it is provided that the machinist reverses the direction of travel of the machine frame to complete the milling operation. The controller registers the selected direction of travel and controls the correct, depending on the direction of travel. the rear in the direction of travel or the trailing hood flap. The now in the direction of travel rear hood flap is used as a scraper whose Abstreifhöhe is adjustable by the controller.
Die Erfindung betrifft auch ein Verfahren zum Fräsen von Böden mit einer Bodenbearbeitungsmaschine mit den Merkmalen des Anspruchs 10.The invention also relates to a method for milling soil with a soil cultivation machine having the features of
Das erfindungsgemäße Verfahren sieht u.a. auch vor, dass zum Schließen der beim Herausfahren der Fräseinrichtung verbleibenden Vertiefung mit Mischgut einerseits das von der in Fahrtrichtung hinteren Haubenklappe abgestrichene Mischgut und andererseits das von der entlang der von der Steuerung vorgegebenen Bahnkurve bewegten Fräseinrichtung abgetragene und in die Vertiefung beförderte Mischgut verwendet wird.The method according to the invention provides i.a. Also, to close the remaining with moving out of the milling device depression with mixed material on the one hand from the direction in the rear hood flap smeared mix and on the other hand of the moved along along the predetermined by the control trajectory milling device removed and conveyed into the recess mix is used.
Im Folgenden wird unter Bezugnahme auf die Zeichnungen ein Ausführungsbeispiel der Erfindung näher erläutert.In the following an embodiment of the invention will be explained in more detail with reference to the drawings.
Es zeigen:
- Fig. 1
- eine schematische Seitenansicht einer erfindungsgemäßen Ausführungsform einer Bodenbearbeitungsmaschine im Gegenlaufbetrieb,
- Fig. 2
- die Mischgutanhäufungen und die Vertiefung an der Fräseinrichtung bei Beendigung des Fräsbetriebs,
- Fig. 3
- die Veranschaulichung der von der Steuerung vorgegebenen Bahnkurve anhand der Verlagerung der Fräswalzenachse in Rückwärtsfahrt, und
- Fig. 4
- die Bahnkurve beim Herausfahren in Vorwärtsfahrt.
- Fig. 1
- a schematic side view of an embodiment according to the invention of a tillage machine in mating operation,
- Fig. 2
- the Mischgutaufhäufungen and the recess on the milling device at the end of the milling operation,
- Fig. 3
- the illustration of the predetermined by the control trajectory based on the displacement of the Fräswalzenachse in reverse, and
- Fig. 4
- the trajectory when moving out in forward drive.
Die aus
Die Fräseinrichtung 8 kann mit Hilfe einer Höhenverstelleinrichtung 20 auf eine eingestellte Frästiefe abgesenkt werden oder nach Beenden der Fräsbearbeitung wieder aus dem bearbeiteten Boden 2 herausgefahren werden.The
Die Haube 10 kann fest am Maschinenrahmen 6 befestigt sein und weist an ihrem in Fahrtrichtung 5 vorderen und hinteren Enden über Stelleinrichtungen 36,38 schwenkbare Haubenklappen 14,15 auf, die den Mischraum 12 der Haube 10 gegen die Bodenoberfläche 3 des Bodens 2 bei Bedarf abschließen.The
Alternativ kann die Haube an Ketten am Maschinenrahmen aufgehängt sein, d.h. im Betriebsfall gleitet die Haube 10 an den Ketten hängend über den Boden. Fährt man die Fräswalze auf Frästiefe Null, dann liegt die Haube 10 immer noch auf der Bodenoberfläche 3 auf. Fährt man die Fräswalze noch höher, dann nimmt sie die Haube 10 mit und hebt somit die Haube 10 vom Boden ab.Alternatively, the hood may be suspended from chains on the machine frame, i. In operation, the
Die schwenkbaren Haubenklappen 14,15 können zum Dichten und Abschließen gegenüber der Bodenoberfläche 3 zusätzlich mit einer flexiblen Leiste 17, z.B. einer Gummilippe, versehen sein.The pivotable hood flaps 14, 15 may be additionally provided, for sealing and sealing with respect to the
Nach dem Ausführungsbeispiel der
Es versteht sich, dass die Höhenverstellung der Fräseinrichtung 8 auch in anderer Weise erfolgen kann, z.B. wie in der
Der Fräswalzenantrieb ist vorzugsweise ein mechanischer Antrieb, der z.B. über ein Riemengetriebe von einem Verbrennungsmotor angetrieben wird.The milling drum drive is preferably a mechanical drive, e.g. is driven by a combustion engine via a belt transmission.
Wird in der in
Das gilt erst recht, wenn die Bodenbearbeitungsmaschine beim Verbringen zu einem anderen Einsatzort über die Hubsäulen stärker angehoben werden muss und somit die Mischgut-Anhäufungen 19,21 neben der Vertiefung 22 verbleiben.This is even more the case when the soil tillage implement has to be lifted more strongly by means of the lifting columns when it is being moved to another site of use, and thus the
Theoretisch wäre es zwar möglich, bei angehobener Fräseinrichtung 8 die Bodenbearbeitungsmaschine 1 mehrfach hin- und her zu bewegen und mit Hilfe der schwenkbaren Haubenklappen 14 und 15 die Mischgutanhäufungen 19,21 in die Vertiefung 22 zu schieben. Praktisch ist dies allerdings nicht möglich, weil der Fahrzeugführer in der Fahrkabine 26 die Vertiefung 22 nicht einsehen kann und insofern die Steuerung der Haubenklappen 14,15 und eine Koordination mit der Vor- oder Rückwärtsfahrt 5,7 nicht ausführen kann.Theoretically, it would indeed be possible to move the tilling
Die Bodenbearbeitungsmaschine 1 weist eine Steuerung 18 auf, die zum Beenden der Fräsbearbeitung die Frästiefe der Fräseinrichtung 8 bei gleichzeitiger Vorwärts- oder Rückwärtsfahrt 5,7 automatisch steuert. Hierzu muss der Fahrzeugführer lediglich einen entsprechenden Befehl an die Steuerung 18 geben, damit die Steuerung 18 die Höhenverstelleinrichtung 20 zum Beenden der Fräsbearbeitung ansteuern kann. Die Steuerung erfolgt entlang einer vorgegebenen Bahnkurve 24, die in der Steuerung 18 abgespeichert sein kann, so dass die Fräseinrichtung 8 in die außer Bodeneingriff befindliche obere Position 9 in
Die Steuerung 18 kann zusätzlich zur Frästiefe auch die Stellung der Haubenklappen 14,15 steuern.The
Die Bahnkurve 24 kann auch in Form einer Asymptote verlaufen, z.B. in Form einer arctan-Funktion, allerdings ist die Form der Bahnkurve 24 hierauf nicht beschränkt.The
Die Steuerung 18 synchronisiert den Weg der Höhenverstellung über die Höhenverstelleinrichtung 20 mit dem Weg in Fahrtrichtung (Vorwärtsfahrt 5 oder Rückwärtsfahrt 7).The
Es versteht sich, dass die Bahnkurven 24 für ein Füllen der Vertiefung 22 beim Gleichlauffräsen oder beim Herausfahren in Vorwärtsfahrt 5 anders verlaufen als in
Der Weg, der zum Füllen der Vertiefung 22 erforderlich ist, beträgt ca. 1 bis 3 Durchmesser der Fräswalze.The path that is required to fill the
Für unterschiedliche Bodenmaterialien und für ein Herausfahren bei Vorwärts- oder Rückwärtsfahrt können unterschiedliche Bahnkurven 24 in der Steuerung 18 gespeichert sein.
Die Klappenstellung der jeweils nachlaufenden Haubenklappe 14,15 kann von der Steuerung 18 über Stelleinrichtungen 36,38 auf eine Höhe eingestellt werden, die die Volumenvergrößerung des Mischgutes 16 aufgrund dessen Auflockerung bei der Fräsbearbeitung berücksichtigt. Auch diese Steuerungswerte können gemeinsam mit der Bahnkurve 24 materialspezifisch in der Steuerung 18 abgespeichert sein.The flap position of each trailing
Aufgrund der beschriebenen Vorgehensweise kann erreicht werden, dass die Vertiefung 22 mit Mischgut 16 mit dem gleichen Lockerungsgrad gefüllt wird, wie er während der gesamten Fräsbearbeitung einer Frässpur entstanden ist. Mit anderen Worten: die Fräsbearbeitung kann abgeschlossen werden, ohne dass Vertiefungen 22 und Mischgutanhäufungen 19,21 verbleiben, und ohne dass Unterschiede im Lockerungsgrad in der bearbeiteten Fläche verbleiben. Dies ist wesentlich für die nachfolgende Bearbeitung der Bodenoberfläche 3 mit Verdichtungsmaschinen, sowie für die späteren Straßenbelagauftragsmaschinen, die einen Straßen- oder Fahrbahnbelag auf die verdichtete Bodenoberfläche 3 aufbringen. Befinden sich nämlich in dem recycelten Mischgut 16 erhebliche Dichteunterschiede, werden diese z.B. durch die nachfolgenden Verdichtungsmaschinen eventuell sogar verstärkt, so dass ein nachfolgend aufgebrachter Fahrbahnbelag an den entsprechenden Stellen Unebenheiten aufweist.Due to the procedure described can be achieved that the
Claims (15)
mit einem Fahrwerk (4) und einem Maschinenrahmen (6),
mit einer quer zur Fahrtrichtung des Maschinenrahmens (6) rotierenden Fräseinrichtung (8),
mit einer die Fräseinrichtung (8) umschließenden, am Maschinenrahmen (6) befestigten oder aufgehängten Haube (10), die einen Mischraum (12) für das Mischgut (16) zwischen Fräseinrichtung (8) und Haube (10) bildet,
mit einer Höhenverstelleinrichtung (20) zum Einstellen der Frästiefe der Fräseinrichtung (8), und
mit einer Steuerung (18),
wobei die die Fräseinrichtung (8) umschließende Haube (10) an dem in Fahrtrichtung vorderen und/oder hinteren Ende eine schwenkbare Haubenklappe (14,15) aufweist, die den Mischraum (12) der Haube (10) gegen die Bodenoberfläche (3) des Bodens (2) abschließt,
dadurch gekennzeichnet,
dass die Steuerung (18) zum Beenden der Fräsbearbeitung die Frästiefe der Fräseinrichtung (8) bei gleichzeitiger Vorwärts- oder Rückwärtsfahrt (5,7) entlang einer vorgegebenen Bahnkurve (24) steuert, wodurch die Fräseinrichtung (8) in die außer Bodeneingriff befindliche obere Position (9) herausfahrbar ist, und
dass die durch die Steuerung (18) bewirkte Höhenverstellung der Fräseinrichtung (8) bei gleichzeitiger Vorwärts- oder Rückwärtsfahrt koordiniert erfolgt, derart, dass die Haube (10) und die Fräseinrichtung (8) die in Fahrtrichtung vor und hinter der Fräseinrichtung (8) befindlichen Mischgutanhäufungen sukzessive in die zunehmend durch das Herausfahren der Fräseinrichtung (8) freiwerdende Vertiefung (22) befördern.Tillage machine (1) for milling floors (2) or traffic areas,
with a chassis (4) and a machine frame (6),
with a milling device (8) rotating transversely to the direction of travel of the machine frame (6),
with a hood (10) which encloses the milling device (8) and is fastened or suspended on the machine frame (6) and which forms a mixing space (12) for the mix (16) between the milling device (8) and the hood (10),
with a height adjustment device (20) for adjusting the cutting depth of the milling device (8), and
with a controller (18),
wherein the hood (10) surrounding the milling device (8) has, at the front and / or rear end in the direction of travel, a pivotable hood flap (14, 15) which projects the mixing space (12) of the hood (10) against the bottom surface (3) of the hood Bodens (2) completes,
characterized,
in that the milling device (18) controls the cutting depth of the milling device (8) during simultaneous forward or reverse travel (5, 7) along a predetermined trajectory (24), whereby the milling device (8) is in the out-of-ground position (9) is removable, and
in that the height adjustment of the milling device (8) effected by the control (18) takes place in a coordinated manner with simultaneous forward or reverse travel, such that the hood (10) and the milling device (8) correspond to the in Direction of travel in front of and behind the milling device (8) located Mischgutanhäufungen successively in the increasingly by the retraction of the milling device (8) freed deepening (22).
dass die Frästiefe zum Beenden der Fräsbearbeitung mit Hilfe der Steuerung (18) bei gleichzeitiger Vorwärts- oder Rückwärtsfahrt (5,7) entlang einer vorgegebenen Bahnkurve (24) gesteuert wird, wodurch die Fräseinrichtung (8) in die außer Bodeneingriff befindliche Position (9) herausgefahren wird, wobei die Höhenverstellung der Fräseinrichtung (8) bei gleichzeitiger Vorwärts- oder Rückwärtsfahrt koordiniert erfolgt und die in Fahrtrichtung vor und hinter der Fräseinrichtung (8) befindlichen Mischgutanhäufungen sukzessive von der Haube (10) und der Fräseinrichtung (8) in die zunehmend durch das Herausfahren der Fräseinrichtung (8) freiwerdende Vertiefung (22) befördert werden, ohne dass eine aus dem Herausfahren der Fräseinrichtung (8) resultierende Vertiefung (22) in der bearbeiteten Bodenoberfläche (3) verbleibt,.Method for milling floors (2) or traffic areas with a soil cultivation machine (1) with control (18),
in that the milling depth for finishing the milling operation is controlled by means of the control (18) with simultaneous forward or reverse travel (5, 7) along a predetermined trajectory (24), whereby the milling device (8) is moved into the position (9) which is out of the ground. is moved out, wherein the height adjustment of the milling device (8) takes place simultaneously with forward or reverse travel and in the direction of travel before and behind the milling device (8) Mischgutaufpumpen successively from the hood (10) and the milling device (8) in the increasingly by the retraction of the milling device (8) released depression (22) are conveyed without a resulting from the retraction of the milling device (8) resulting recess (22) in the machined soil surface (3) remains,.
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| DE102010051551A DE102010051551A1 (en) | 2010-11-18 | 2010-11-18 | Soil cultivation machine and method for milling floors or traffic areas |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| EP2455544A2 true EP2455544A2 (en) | 2012-05-23 |
| EP2455544A3 EP2455544A3 (en) | 2014-06-18 |
| EP2455544B1 EP2455544B1 (en) | 2016-06-08 |
Family
ID=45318818
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP11189602.3A Active EP2455544B1 (en) | 2010-11-18 | 2011-11-17 | Soil or pavement milling machine and method for milling soils or traffic surfaces |
Country Status (5)
| Country | Link |
|---|---|
| US (2) | US8485755B2 (en) |
| EP (1) | EP2455544B1 (en) |
| CN (2) | CN102465486B (en) |
| AU (1) | AU2011250734B2 (en) |
| DE (1) | DE102010051551A1 (en) |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN103437269A (en) * | 2013-08-29 | 2013-12-11 | 徐州徐工筑路机械有限公司 | Rotor moving mechanism of cold recycler |
| EP2840183A1 (en) * | 2013-08-23 | 2015-02-25 | Wirtgen GmbH | Self-propelled construction machine and method for operating a self-propelled construction machine |
| EP2977514A1 (en) | 2014-07-23 | 2016-01-27 | Wirtgen GmbH | Soil cultivation machine and method for cutting soils or traffic surfaces |
| US10294086B2 (en) | 2016-04-06 | 2019-05-21 | Oshkosh Corporation | Dual actuator assembly |
| US11767645B2 (en) | 2021-04-01 | 2023-09-26 | Wirtgen Gmbh | Self-propelled construction machine and method for operating a self-propelled construction machine |
Families Citing this family (22)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102010051551A1 (en) * | 2010-11-18 | 2012-05-24 | Wirtgen Gmbh | Soil cultivation machine and method for milling floors or traffic areas |
| DE102012012395A1 (en) * | 2012-06-25 | 2014-01-02 | Wirtgen Gmbh | road milling machine |
| DE102012016173A1 (en) * | 2012-08-16 | 2014-02-20 | Wirtgen Gmbh | Self-propelled construction machine and method for operating a construction machine |
| DE102012215013A1 (en) | 2012-08-23 | 2014-02-27 | Wirtgen Gmbh | Self-propelled milling machine, as well as method for unloading milled material |
| DE102013208645B4 (en) * | 2013-05-10 | 2018-01-11 | Wirtgen Gmbh | Device, in particular small milling machine, for processing road surfaces |
| CN103437268B (en) * | 2013-08-29 | 2016-04-27 | 徐州徐工筑路机械有限公司 | A kind of rotor mechanism of pavement cold recycler |
| DE102013016515A1 (en) * | 2013-10-07 | 2015-04-09 | Wirtgen Gmbh | Device and method for working floors or roads |
| US9103079B2 (en) | 2013-10-25 | 2015-08-11 | Caterpillar Paving Products Inc. | Ground characteristic milling machine control |
| DE102015002426A1 (en) * | 2014-12-30 | 2016-06-30 | Bomag Gmbh | Ground milling machine and method for adjusting the scraper blade of a ground milling machine |
| US20160326701A1 (en) * | 2015-05-07 | 2016-11-10 | Caterpillar Paving Products Inc. | Rotary Mixer with Automated Control Functions |
| DE102015014573B4 (en) * | 2015-11-12 | 2020-03-19 | Wirtgen Gmbh | Self-propelled milling machine and method for working a traffic area |
| US9797100B1 (en) | 2016-05-23 | 2017-10-24 | Caterpillar Paving Products Inc. | Milling machine |
| CA3044842A1 (en) * | 2016-11-23 | 2018-05-31 | Garlon J. Maxwell | Smoothing drum with precision leveling for smoothing pavement surfaces |
| US10151071B1 (en) * | 2017-06-13 | 2018-12-11 | Caterpillar Paving Products Inc. | Anti-slab height control system for a cold planer |
| DE102019104218A1 (en) | 2019-02-19 | 2020-08-20 | Wirtgen Gmbh | Work train, comprising a tillage machine and another vehicle as well as an automated distance monitoring |
| DE102019135867A1 (en) * | 2019-12-30 | 2021-07-01 | Wirtgen Gmbh | Removing soil cultivation method with an excavating tool inclined with respect to the advance direction and a soil cultivation machine designed to carry out the method |
| US11136732B2 (en) * | 2020-01-28 | 2021-10-05 | Caterpillar Paving Products Inc. | Milling machine having pivot arms offset from engine output shaft |
| US11203841B2 (en) | 2020-04-01 | 2021-12-21 | Caterpillar Paving Products Inc. | Machine, system, and method for automated milling exit cut operation |
| DE102020120243B4 (en) * | 2020-07-31 | 2022-02-17 | Wirtgen Gmbh | construction machine |
| CN112663462B (en) * | 2020-12-22 | 2022-06-10 | 广西北部湾投资集团有限公司沿海高速公路分公司 | Old pavement treatment device based on finish milling, planing and polishing and construction method |
| US20230050075A1 (en) | 2021-08-04 | 2023-02-16 | Midwest Industrial Supply, Inc. | Method and composition for constructing scientifically engineered and constructed unpaved runways |
| DE102021134623A1 (en) * | 2021-12-23 | 2023-06-29 | Wirtgen Gmbh | construction machine |
Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US3865195A (en) | 1972-07-05 | 1975-02-11 | Koehring Co | Self-propelled soil stabilizer machine |
| WO1996024725A1 (en) | 1995-02-12 | 1996-08-15 | Wirtgen Gmbh | Roadworking machine |
| JP2003301410A (en) | 2002-04-10 | 2003-10-24 | Komatsu Ltd | Soil improvement machine |
| WO2005054578A1 (en) | 2003-12-04 | 2005-06-16 | Wirtgen Gmbh | Automotive machine for producing carriageways |
| DE102006024123A1 (en) | 2006-05-22 | 2007-11-29 | Wirtgen Gmbh | Self-propelled construction machine, as well as methods for processing of ground surfaces |
| DE202008016935U1 (en) | 2008-12-23 | 2010-06-10 | Wirtgen Gmbh | Construction machine, in particular stabilizer or recycler |
| EP2218823A2 (en) | 2009-02-14 | 2010-08-18 | Wirtgen GmbH | Stabiliser or recycler |
Family Cites Families (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE3921875A1 (en) * | 1989-07-04 | 1991-01-17 | Bomag Gmbh | Self propelling or tractor drawn machine for working on road surfaces - has milling roller in housing and can be reversed while roller continues to rotate in same direction |
| DE10241067B3 (en) * | 2002-09-05 | 2004-04-22 | Wirtgen Gmbh | Device for working floors or roadways |
| CN1209530C (en) * | 2003-05-16 | 2005-07-06 | 长沙中联重工科技发展股份有限公司 | Method and device for realizing adaptive control of discharging speed of milling and planning machine |
| CN100465387C (en) | 2003-12-01 | 2009-03-04 | 日本植生株式会社 | Device for spraying mortar or concrete, and method of spraying mortar or concrete by using the device |
| WO2008077963A1 (en) * | 2006-12-22 | 2008-07-03 | Wirtgen Gmbh | Road milling machine, and method for positioning the machine frame parallel to the ground |
| US7585128B2 (en) * | 2007-02-13 | 2009-09-08 | Hall David R | Method for adding foaming agents to pavement aggregate |
| DE102007038677B4 (en) * | 2007-08-15 | 2009-09-17 | Wirtgen Gmbh | Scraper device, as well as construction machine |
| US8177456B2 (en) * | 2007-12-21 | 2012-05-15 | Asphalt Zipper, Inc. | Pavement milling assembly |
| CN201280682Y (en) * | 2008-10-20 | 2009-07-29 | 三一重工股份有限公司 | Milling and planing machine with material deposit removing device |
| DE102010051551A1 (en) * | 2010-11-18 | 2012-05-24 | Wirtgen Gmbh | Soil cultivation machine and method for milling floors or traffic areas |
-
2010
- 2010-11-18 DE DE102010051551A patent/DE102010051551A1/en not_active Ceased
-
2011
- 2011-11-11 AU AU2011250734A patent/AU2011250734B2/en active Active
- 2011-11-17 EP EP11189602.3A patent/EP2455544B1/en active Active
- 2011-11-17 US US13/298,377 patent/US8485755B2/en active Active
- 2011-11-18 CN CN201110369936.8A patent/CN102465486B/en active Active
- 2011-11-18 CN CN201120462891.4U patent/CN202347408U/en not_active Withdrawn - After Issue
-
2013
- 2013-06-12 US US13/915,844 patent/US8764341B2/en active Active
Patent Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US3865195A (en) | 1972-07-05 | 1975-02-11 | Koehring Co | Self-propelled soil stabilizer machine |
| WO1996024725A1 (en) | 1995-02-12 | 1996-08-15 | Wirtgen Gmbh | Roadworking machine |
| DE19504495A1 (en) | 1995-02-12 | 1996-08-22 | Wirtgen Gmbh | Road surface renewal machine |
| JP2003301410A (en) | 2002-04-10 | 2003-10-24 | Komatsu Ltd | Soil improvement machine |
| WO2005054578A1 (en) | 2003-12-04 | 2005-06-16 | Wirtgen Gmbh | Automotive machine for producing carriageways |
| DE102006024123A1 (en) | 2006-05-22 | 2007-11-29 | Wirtgen Gmbh | Self-propelled construction machine, as well as methods for processing of ground surfaces |
| DE202008016935U1 (en) | 2008-12-23 | 2010-06-10 | Wirtgen Gmbh | Construction machine, in particular stabilizer or recycler |
| EP2218823A2 (en) | 2009-02-14 | 2010-08-18 | Wirtgen GmbH | Stabiliser or recycler |
Non-Patent Citations (4)
| Title |
|---|
| "CAT BODENSTABILISIERER", ZEPPELIN CAT, April 2008 (2008-04-01), XP003035235, Retrieved from the Internet <URL:HTTPS://WEB.ARCHIVE.ORG/WEB/20080404020648/HTTP://WWW.ZEPPELIN-CAT.AT/CAT_BODENSTABILISIERER> |
| CATERPILLAR: "RM-500 BODENSTABILISIERER", CAT BROCHURE, April 2006 (2006-04-01), pages 1 - 15, XP003035234 |
| F.J. STETTER BODENVERBESSERUNG: "ZU VERKAUFEN CAT BODENSTABILISIERER RM 500", STETTERSERVICE PRODUCT SHEET, August 2009 (2009-08-01), XP003035236 |
| FOLEY EQUIPMENT: "CAT RM500 ROAD RECLAIMER", YOUTUBE, 21 April 2014 (2014-04-21), XP054975948, Retrieved from the Internet <URL:HTTPS://WWW.YOUTUBE.COM/WATCH?V=EAQZPD4DGA4> |
Cited By (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP2840183A1 (en) * | 2013-08-23 | 2015-02-25 | Wirtgen GmbH | Self-propelled construction machine and method for operating a self-propelled construction machine |
| US9322139B2 (en) | 2013-08-23 | 2016-04-26 | Wirtgen Gmbh | Self-propelled construction machine and method for operating a self-propelled construction machine |
| US9644330B2 (en) | 2013-08-23 | 2017-05-09 | Wirtgen Gmbh | Self-propelled construction machine and method for operating a self-propelled construction machine |
| CN103437269A (en) * | 2013-08-29 | 2013-12-11 | 徐州徐工筑路机械有限公司 | Rotor moving mechanism of cold recycler |
| EP2977514A1 (en) | 2014-07-23 | 2016-01-27 | Wirtgen GmbH | Soil cultivation machine and method for cutting soils or traffic surfaces |
| DE102014214436A1 (en) | 2014-07-23 | 2016-01-28 | Wirtgen Gmbh | Soil cultivation machine, as well as methods for milling ground or traffic surfaces |
| US9879392B2 (en) | 2014-07-23 | 2018-01-30 | Wirtgen Gmbh | Ground working machine, as well as method for milling ground surfaces or traffic surfaces |
| US10494778B2 (en) | 2014-07-23 | 2019-12-03 | Wirtgen Gmbh | Ground working machine, as well as method for milling ground surfaces or traffic surfaces |
| US10294086B2 (en) | 2016-04-06 | 2019-05-21 | Oshkosh Corporation | Dual actuator assembly |
| US11767645B2 (en) | 2021-04-01 | 2023-09-26 | Wirtgen Gmbh | Self-propelled construction machine and method for operating a self-propelled construction machine |
Also Published As
| Publication number | Publication date |
|---|---|
| EP2455544A3 (en) | 2014-06-18 |
| DE102010051551A1 (en) | 2012-05-24 |
| US8764341B2 (en) | 2014-07-01 |
| CN102465486B (en) | 2014-07-02 |
| US8485755B2 (en) | 2013-07-16 |
| US20120128419A1 (en) | 2012-05-24 |
| CN102465486A (en) | 2012-05-23 |
| AU2011250734A1 (en) | 2012-06-07 |
| CN202347408U (en) | 2012-07-25 |
| EP2455544B1 (en) | 2016-06-08 |
| AU2011250734B2 (en) | 2013-05-02 |
| US20130309009A1 (en) | 2013-11-21 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP2455544B1 (en) | Soil or pavement milling machine and method for milling soils or traffic surfaces | |
| EP2735650B2 (en) | Method for treating layers, a construction machine and an auxiliary construction machine | |
| EP2953844A1 (en) | Vehicle | |
| DE112016000713B4 (en) | Auto-calibration of an automatic leveling control system in a work machine | |
| EP2886717A1 (en) | After-treatment machine and method for the subsequent processing of a freshly made concrete layer | |
| DE6905815U (en) | DEVICE FOR REMOVING WEARED STREET COVERS. | |
| DE2856635C2 (en) | Machine for coating milled or peeled off road surfaces | |
| DE102018006688A1 (en) | Soil milling machine and method for operating a soil milling machine | |
| DE2330548A1 (en) | DEVICE THAT LAYS A TAPE OF A MOLDABLE PLASTIC MIXTURE DURING ITS FORWARD MOVEMENT | |
| WO2008098383A1 (en) | Ground-working machine | |
| DE202008016935U1 (en) | Construction machine, in particular stabilizer or recycler | |
| EP4108831B1 (en) | Road miller and method for controlling a road miller | |
| DE102012024769A1 (en) | Construction machine for mixing bulk material-type aggregate into bottom substrate i.e. bottom stabilizer or recycler, has soil discharging unit adapted for introduction of bulk-type additives in mixing drum in working direction of machine | |
| EP3301223B1 (en) | Device for reconditioning and profiling damaged water bound coverings | |
| EP1073798B1 (en) | Device for treating roads | |
| DE102021212736A1 (en) | METHOD OF OPERATING A SELF-PROPELLED TILLER AND TILLER WITH A CONTROL DEVICE | |
| DE3031688A1 (en) | Concrete compacting and moulding machine - has tunnel shaped moulding member with closed top and sides and open at bottom | |
| EP2568079B1 (en) | Cold asphalting device | |
| DE2248577C2 (en) | Device for processing the lower base course for a roadway | |
| DE20000148U1 (en) | Paver in container size | |
| DE8315139U1 (en) | MILLING MACHINE | |
| DE1658563A1 (en) | Device for filling and leveling bulk goods in longitudinal strips adjacent to paved roads | |
| DE102022128413A1 (en) | MILLING MACHINES, SYSTEMS AND RELATED PROCESSES | |
| EP1799910B1 (en) | Device for constructing a road or the like | |
| EP2982803B1 (en) | Construction machine with levelling attachment and levelling method therewith |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| AK | Designated contracting states |
Kind code of ref document: A2 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| AX | Request for extension of the european patent |
Extension state: BA ME |
|
| PUAL | Search report despatched |
Free format text: ORIGINAL CODE: 0009013 |
|
| AK | Designated contracting states |
Kind code of ref document: A3 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| AX | Request for extension of the european patent |
Extension state: BA ME |
|
| RIC1 | Information provided on ipc code assigned before grant |
Ipc: E01C 21/00 20060101AFI20140515BHEP Ipc: E01C 23/088 20060101ALI20140515BHEP |
|
| 17P | Request for examination filed |
Effective date: 20141014 |
|
| RBV | Designated contracting states (corrected) |
Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| TPAC | Observations filed by third parties |
Free format text: ORIGINAL CODE: EPIDOSNTIPA |
|
| GRAP | Despatch of communication of intention to grant a patent |
Free format text: ORIGINAL CODE: EPIDOSNIGR1 |
|
| INTG | Intention to grant announced |
Effective date: 20160111 |
|
| GRAS | Grant fee paid |
Free format text: ORIGINAL CODE: EPIDOSNIGR3 |
|
| GRAA | (expected) grant |
Free format text: ORIGINAL CODE: 0009210 |
|
| AK | Designated contracting states |
Kind code of ref document: B1 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| REG | Reference to a national code |
Ref country code: GB Ref legal event code: FG4D Free format text: NOT ENGLISH |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: EP |
|
| REG | Reference to a national code |
Ref country code: IE Ref legal event code: FG4D Free format text: LANGUAGE OF EP DOCUMENT: GERMAN |
|
| REG | Reference to a national code |
Ref country code: AT Ref legal event code: REF Ref document number: 805349 Country of ref document: AT Kind code of ref document: T Effective date: 20160715 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R096 Ref document number: 502011009906 Country of ref document: DE |
|
| REG | Reference to a national code |
Ref country code: SE Ref legal event code: TRGR |
|
| REG | Reference to a national code |
Ref country code: LT Ref legal event code: MG4D |
|
| REG | Reference to a national code |
Ref country code: NL Ref legal event code: MP Effective date: 20160608 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: FI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20160608 Ref country code: LT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20160608 Ref country code: NO Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20160908 |
|
| REG | Reference to a national code |
Ref country code: FR Ref legal event code: PLFP Year of fee payment: 6 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: RS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20160608 Ref country code: ES Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20160608 Ref country code: LV Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20160608 Ref country code: NL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20160608 Ref country code: HR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20160608 Ref country code: GR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20160909 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: CZ Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20160608 Ref country code: EE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20160608 Ref country code: IS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20161008 Ref country code: SK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20160608 Ref country code: RO Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20160608 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: PL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20160608 Ref country code: SM Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20160608 Ref country code: PT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20161010 Ref country code: BE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20161130 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R097 Ref document number: 502011009906 Country of ref document: DE |
|
| PLBE | No opposition filed within time limit |
Free format text: ORIGINAL CODE: 0009261 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: NO OPPOSITION FILED WITHIN TIME LIMIT |
|
| 26N | No opposition filed |
Effective date: 20170309 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20160608 Ref country code: DK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20160608 |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: PL |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: LI Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20161130 Ref country code: CH Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20161130 |
|
| REG | Reference to a national code |
Ref country code: IE Ref legal event code: MM4A |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: LU Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20161130 |
|
| REG | Reference to a national code |
Ref country code: FR Ref legal event code: PLFP Year of fee payment: 7 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20161117 |
|
| REG | Reference to a national code |
Ref country code: AT Ref legal event code: MM01 Ref document number: 805349 Country of ref document: AT Kind code of ref document: T Effective date: 20161117 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: AT Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20161117 |
|
| REG | Reference to a national code |
Ref country code: BE Ref legal event code: MM Effective date: 20161130 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: CY Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20160608 Ref country code: HU Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT; INVALID AB INITIO Effective date: 20111117 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20160608 Ref country code: MC Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20160608 Ref country code: TR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20160608 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: BG Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20160608 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20160608 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: AL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20160608 |
|
| P01 | Opt-out of the competence of the unified patent court (upc) registered |
Effective date: 20230525 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: GB Payment date: 20231123 Year of fee payment: 13 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: SE Payment date: 20231123 Year of fee payment: 13 Ref country code: IT Payment date: 20231130 Year of fee payment: 13 Ref country code: FR Payment date: 20231124 Year of fee payment: 13 Ref country code: DE Payment date: 20231120 Year of fee payment: 13 |