EP2322701B1 - Device and method for the automatic pick-up of fibre from a bale of fibre on a spinning line - Google Patents
Device and method for the automatic pick-up of fibre from a bale of fibre on a spinning line Download PDFInfo
- Publication number
- EP2322701B1 EP2322701B1 EP10181313A EP10181313A EP2322701B1 EP 2322701 B1 EP2322701 B1 EP 2322701B1 EP 10181313 A EP10181313 A EP 10181313A EP 10181313 A EP10181313 A EP 10181313A EP 2322701 B1 EP2322701 B1 EP 2322701B1
- Authority
- EP
- European Patent Office
- Prior art keywords
- pick
- bales
- arm
- fibre
- control means
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 239000000835 fiber Substances 0.000 title claims description 49
- 238000000034 method Methods 0.000 title claims description 18
- 238000009987 spinning Methods 0.000 title 1
- 230000000284 resting effect Effects 0.000 claims description 4
- 230000001419 dependent effect Effects 0.000 claims description 3
- 230000003750 conditioning effect Effects 0.000 claims description 2
- 230000001360 synchronised effect Effects 0.000 claims description 2
- 230000008713 feedback mechanism Effects 0.000 claims 2
- 230000004913 activation Effects 0.000 claims 1
- 230000005540 biological transmission Effects 0.000 description 3
- 230000035515 penetration Effects 0.000 description 3
- 229920000742 Cotton Polymers 0.000 description 2
- 230000001276 controlling effect Effects 0.000 description 2
- 238000010586 diagram Methods 0.000 description 2
- 229920002994 synthetic fiber Polymers 0.000 description 2
- 230000015572 biosynthetic process Effects 0.000 description 1
- 238000004891 communication Methods 0.000 description 1
- 230000001143 conditioned effect Effects 0.000 description 1
- 230000000750 progressive effect Effects 0.000 description 1
- 230000001105 regulatory effect Effects 0.000 description 1
- 239000004753 textile Substances 0.000 description 1
Images



Classifications
-
- D—TEXTILES; PAPER
- D01—NATURAL OR MAN-MADE THREADS OR FIBRES; SPINNING
- D01G—PRELIMINARY TREATMENT OF FIBRES, e.g. FOR SPINNING
- D01G7/00—Breaking or opening fibre bales
- D01G7/06—Details of apparatus or machines
- D01G7/10—Arrangements for discharging fibres
-
- D—TEXTILES; PAPER
- D01—NATURAL OR MAN-MADE THREADS OR FIBRES; SPINNING
- D01G—PRELIMINARY TREATMENT OF FIBRES, e.g. FOR SPINNING
- D01G7/00—Breaking or opening fibre bales
- D01G7/06—Details of apparatus or machines
- D01G7/14—Driving arrangements
Definitions
- the present invention relates to a device and method for the automatic pick-up of fibre from a bale of fibre on a textile processing line.
- bales it is rare for all the bales to have the same geographical provenance or be composed of the same fibres; normally, in fact since natural fibre has characteristics which are highly dependent on the place of origin and the type of plant, fibres are mixed to obtain a final yarn having the desired quality characteristics and to minimise production costs.
- the bales are usually positioned in a row along the side of the pick-up device and are not all the same height, so that, when placed in a row, they have a staggered outline.
- the bales are not the same density, precisely on account of their different provenance and quality of the fibre. Within the same bale, moreover, differences in density occur, being less dense on the free upper surface (that is the bale is softer on the surface) and denser in the middle (the bale, that is, in the centre).
- the pick-up device is usually composed of a column translating on tracks, which the row of bales flanks; the column bears a swing arm which passes over the bales and picks up a layer of fibre, usually using rotating rollers fitted with tips.
- the column has an outbound and a return movement along the tracks, so that at each passage the arm picks up a layer of fibre.
- pick-up device is described, for example in document EP-A1-1571244 , in the name of the Applicant.
- the outline of the bales is staggered and the density of the fibre is not constant.
- some pick-up devices foresee setting of the height at which to commence pick-up and the thickness of the layer to be picked; at each passage the machine lowers the arm to pick up a further layer. During a single passage, the height of the arm remains constant.
- Such devices can cause problems, especially on start-up of the process, when the outline is staggered, and on account of the different densities of the fibre.
- the B12N device manufactured by Marzoli S.p.A. is, instead, an automatic pick-up device, fitted with an arm the height of which is regulated depending on the pressure of the arm on the bale; such device operates perfectly even on start-up of the process.
- the purpose of the present invention is to further improve an automatic device and to identify an improved method for picking up fibre from bales of fibre.
- a pick-up device comprising:
- - actuation means able to move the arm vertically in a controlled manner
- - first control means able to condition the actuation means to control the vertical movement of the arm on the basis of the values of a first set of parameters which define the state of the bales or of the pick-up device;
- - second control means able to condition the actuation means to control the vertical movement of the arm on the basis of the values of a second set of parameters which define the state of the bales or of the pick-up device;
- - enabling means able to activate the first control means or the second control means according to the values of a set of selection parameters, which define a state of the bales or of the pick-up device, to condition said actuation means by means of the first control means or the second control means.
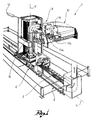
- FIG. 1 shows an axonometric view of a pick-up device of fibre from a bale of fibre according to the present invention, according to a preferred embodiment
- FIG. 2 shows a functioning diagram of the pick-up device according to the present invention
- FIG. 3 shows a diagram of an arm of the pick-up device according to the present invention
- reference numeral 1 globally denotes a pick-up unit on a fibre processing line.
- the unit 1 comprises a track 2 having a main extension along a translation axis X.
- the bales of fibre are positioned along the track 2, along one or both sides of said track, sometimes continuously, sometimes distanced from each other. Such bales occupy a pick-up area, alongside the track 2, on the ground.
- the unit 1 comprises an expulsion duct 3, communicating with further devices downstream of the pick-up device, performing subsequent processing or air aspiration.
- the expulsion duct 3 is positioned between the rails of the track 2.
- the unit 1 further comprises a pick-up device 4, resting on the track 2 and translatable upon command along it.
- the device 4 comprises a carriage 6, for example fitted with wheels, resting on the track 2, and a column 8 having its main extension along a vertical axis Y, resting on the carriage 6.
- the device 4 further comprises an arm 10 jutting out from the column so as to lie over the pick-up area where the bales are positioned; in other words the arm is shaped like a flag.
- the column 8 or the arm 10 can rotate around the vertical axis Y, to pick up fibre from the bales positioned on one or other side of the track 2.
- the pick-up device 4 further comprises pick-up means of the fibre from the bales, such as at least one pick-up roller of fibre from the bale, supported by the arm 10.
- the device 4 comprises a pair of pick-up rollers 11a, 11b rotating upon command around respective longitudinally distanced rotation axes 11c, 11d.
- the pick-up rollers 11a, 11b are equipped on the surface with tips 12 able to tear the fibre from the bales.
- the device 4 comprises a cage 14 fitted with pressure bars 14a having a longitudinal extension and positioned vertically, distanced from the rotation axes 11c, 11d, so that the tips of these project below the bars 14a to tear off the fibre.
- the relative distance between the pressure bars 14a and the rotation axes 11c, 11d of the rollers 11a, 11b is adjustable for example by means of an electric motor fitted onto the arm 10.
- the device 4 further comprises transport means for transport of the fibre to subsequent processes, such as an aspiration duct 16 having an aspiration aperture at the point of the pick-up rollers 11a, 11b to aspirate the fibre picked up by the tips 12 from the rollers.
- transport means for transport of the fibre to subsequent processes such as an aspiration duct 16 having an aspiration aperture at the point of the pick-up rollers 11a, 11b to aspirate the fibre picked up by the tips 12 from the rollers.
- the aspiration duct 16 is housed in the arm 10 and the rollers 11a, 11b are contained therein, it extends further in the column 8 and is in communication, even while the column 8 is in translation, with the expulsion duct 3, to bring the fibre to subsequent processes.
- the arm 10 can translate vertically upon command along the column 8.
- the device 1 comprises transmission means able to move the arm vertically, sliding along the column and actuation means able to drive the transmission.
- the actuation means comprise an electric motor 12, preferably a permanent magnet synchronous feedback motor, that is provided with feedback means 13, for example fitted on the pick-up device 4, and a processing device 13a to send the motor 12 the actuation signals.
- the feedback means of the electric motor 12 comprise a resolver and/or encoder operatively connected to the motor shaft.
- the transmission means further comprise, for example, sliding guides which the arm 10 slides on, and a kinematic chain able to transform the rotatory movement of the motor shaft into a vertical translatory movement of the arm 10.
- the pick-up device 4 further comprises main control means able to detect the height of the bales and to send respective signals to the actuation means to raise and/or lower the arm so that the pick-up rollers are positioned at the right height to pick-up the layer of fibre of the pre-set thickness from the free upper surface of each bale.
- the arm 10 is commanded to pass over the bales, measuring the length of the bales, in other words their extension along the direction of the track, their position and their height.
- the observed data is for example memorised in an estimation device 18, the estimation device 18 is operatively connected to the actuation means by the processing device 13a.
- the pick-up device 4 comprises first control means able to condition the actuation means to keep the force of the arm 10 on the bales constant.
- said first control means comprise the feedback means 13 of the motor 12.
- said first control means are able to control the electric motor 12 to function at a constant torque.
- the pick-up device 4 comprises second control means able to condition the actuation means to keep the vertical movement of the arm constant.
- said second control means comprise the feedback means 13 of the motor 12.
- said second control means are able to command the motor to function at a constant pitch, that is so that at each passage of the arm over the bales, the motor shaft rotates by a pre-set constant angle between one passage and the next.
- the pick-up device 4 comprises enabling means 26, preferably automatic, able to actuate the first and second control means to condition the actuation means.
- the enabling means 26 are operatively connected to the feedback means 13 of the motor 12 to receive signals depending on the height of the arm 10 by means of a memorisation device 32 which memorises the heights of the arm at each passage over the bales, and a comparison device 34 which estimates the heights and sends a selection signal according to the values found for the heights.
- the comparison device estimates the containment of the height variation within a pre-set range. If the height variation of the arm falls within the pre-set range, the comparison device 34 sends a selection signal to activate the enabling means 26 enabling control of the actuation means by the second control means.
- the comparison device 34 estimates the lowering of the heights below a pre-set minimum value. If the heights are below a pre-set minimum value, the comparison device 34 sends a further actuation selection signal to the enabling means 26 which enable conditioning of the actuation means by means of the first control means.
- the pick-up device 4 comprises third control means 40 able to adjust the relative position of the pick-up rollers 11a 11b and the cage 14, and in particular the pressure bars 14a of said cage 14.
- the third control means 40 are operatively connected to the processing device 13a.
- the extent of the projection of the tips 12 below the pressure bars 14a can be adjusted, increasing or reducing how far the tips sink into the bales.
- the bales A-D are initially positioned beside one another, more or less continuously, to the side of the track 2 along the translation axis X in the pick-up area and are of variable height ( figure 4a ).
- the actuation means are conditioned by the first control means.
- the electric motor 12 is controlled at a constant torque.
- the main control means 18 condition the actuation means so that the arm translates vertically bringing the tips of the pick-up rollers 11a, 11b to lie against the free surface of the bales and the first control means condition the actuation mean so that the arm 10 operates at a constant force on the bales.
- the density of the bales at start-up is low so that the bale is soft; operating at a constant force therefore constitutes a considerable advantage, in that the bale is compressed by the arm until it resists with a predefined force optimal for removal of the fibre. Moreover, by proceeding at a constant force, processing leads to a progressive levelling of the outline of the bales.
- the third means of control are also active in such configuration, to vary the penetration of the tips into the fibre by adjusting the relative distance between the pressure bars 14a of the cage 14 and the rotation axes 11c, 11d of the pick-up rollers 11a, 11b.
- the third control means operate to increase pick-up (by bringing the pressure bars 14a of the cage 14 closer to the rotation axes 11c,11d of the pick-up rollers 11a, 11b) when the arm 10 rises, and vice versa, so as to speed up levelling of the outline of the bales.
- the bales A-D tend to level out ( figure 4b ), until they reach a configuration in which the variation of the heights of the bales is contained within a pre-set range (I).
- the comparison device 34 estimates the containment of the heights of the free surfaces of the bales within the pre-set range I and sends a second selection signal to the enabling means 26 so that the second control means are enabled and therefore said second control means condition the actuation means; the actuation means therefore operate so as to keep the lowering of the arm 10 at each passage constant.
- the motor 12 is controlled at a constant pitch which ensures constant lowering of the arm.
- bales being processed in this phase are very soft, or contain synthetic or "pigneuse" fibre.
- the prior machines rather, in such condition, reveal considerable drawbacks, especially if the arm is controlled at a constant force; in such case the arm shows a tendency to sink, pushing to the ground laps of bales or entire bales, especially at the sides of the row of bales.
- the machine according to the invention proves particularly advantageous for processing traditional fibres such as cotton, for which the density of the bales is greater than in the previous condition and operating at a constant pitch is extremely advantageous for maintaining levelling of the outline and speeding up pick-up.
- the third means of control are also active in such configuration, to vary the penetration of the tips into the fibre by adjusting the relative distance between the pressure bars 14a of the cage 14 and the rotation axes 11c, 11d of the pick-up rollers 11a, 11b, for example so as to modify the quantity of fibre picked up depending on the demand made by the machines downstream.
- the bales A-D tend to level out ( figure 4c ), until they reach a configuration in which the height of the bales is below a pre-set threshold value L.
- the bales are not high enough to be elastic, feeling the hardness of the floor; the density of the bales is, additionally, once again low.
- the comparison device 34 detects that the height of the arm 10 is below the pre-set threshold value L and sends a first selection signal to the enabling means 26 so that the first control means are enabled and therefore said first control means condition the actuation means; the actuation means therefore operate so as to maintain the force of the arm on the bales constant.
- the third means of control are also active in such configuration, to vary the penetration of the tips into the fibre by adjusting the relative distance between the pressure bars 14a of the cage 14 and the rotation axes 11c, 11d of the pick-up rollers 11a, 11b.
- the pick-up device and method according to the present invention operate in an excellent manner on all the configurations of the bales, from start-up of pick-up from new bales to the end of pick-up from almost exhausted bales.
- the pick-up device and method according to the present invention also operate excellently on bales of fibres of varying origin, that is with natural fibres, such as cotton and with fibres from combing discards or with synthetic fibres.
Landscapes
- Engineering & Computer Science (AREA)
- Textile Engineering (AREA)
- Preliminary Treatment Of Fibers (AREA)
- Spinning Or Twisting Of Yarns (AREA)
Description
- The present invention relates to a device and method for the automatic pick-up of fibre from a bale of fibre on a textile processing line.
- Picking fibre in tufts from the bales is the first stage of the process which leads to the formation of yarn from fibre.
- It is rare for all the bales to have the same geographical provenance or be composed of the same fibres; normally, in fact since natural fibre has characteristics which are highly dependent on the place of origin and the type of plant, fibres are mixed to obtain a final yarn having the desired quality characteristics and to minimise production costs.
- Usually, in addition, synthetic fibres or fibres derived from production discards, such as "pigneuse" fibre derived from combing discards, are processed.
- The bales are usually positioned in a row along the side of the pick-up device and are not all the same height, so that, when placed in a row, they have a staggered outline. In addition, the bales are not the same density, precisely on account of their different provenance and quality of the fibre. Within the same bale, moreover, differences in density occur, being less dense on the free upper surface (that is the bale is softer on the surface) and denser in the middle (the bale, that is, in the centre).
- The pick-up device is usually composed of a column translating on tracks, which the row of bales flanks; the column bears a swing arm which passes over the bales and picks up a layer of fibre, usually using rotating rollers fitted with tips. The column has an outbound and a return movement along the tracks, so that at each passage the arm picks up a layer of fibre.
- One example of a pick-up device is described, for example in document
EP-A1-1571244 , in the name of the Applicant. - As has been said, the outline of the bales is staggered and the density of the fibre is not constant.
- To perform pick-up from a row of bales, some pick-up devices foresee setting of the height at which to commence pick-up and the thickness of the layer to be picked; at each passage the machine lowers the arm to pick up a further layer. During a single passage, the height of the arm remains constant.
- Such devices can cause problems, especially on start-up of the process, when the outline is staggered, and on account of the different densities of the fibre.
- The B12N device manufactured by Marzoli S.p.A. is, instead, an automatic pick-up device, fitted with an arm the height of which is regulated depending on the pressure of the arm on the bale; such device operates perfectly even on start-up of the process.
- The purpose of the present invention is to further improve an automatic device and to identify an improved method for picking up fibre from bales of fibre.
- Such purpose is achieved by a pick-up device comprising:
- - an arm able to translate above the bales along a horizontal pick-up axis, fitted with pick-up means able to pick-up the fibre from the free surface of the bales;
- - transport means able to transport the picked-up fibre to subsequent processes, said transport means being operatively connected to said pick-up means;
- - actuation means able to move the arm vertically in a controlled manner;
- - first control means able to condition the actuation means to control the vertical movement of the arm on the basis of the values of a first set of parameters which define the state of the bales or of the pick-up device;
- - second control means able to condition the actuation means to control the vertical movement of the arm on the basis of the values of a second set of parameters which define the state of the bales or of the pick-up device;
- - enabling means able to activate the first control means or the second control means according to the values of a set of selection parameters, which define a state of the bales or of the pick-up device, to condition said actuation means by means of the first control means or the second control means.
- Such purpose is also achieved by an automatic method comprising the phases of:
- - moving an arm fitted with pick-up means onto the bales of fibre and picking-up a layer of fibre;
- - moving the arm vertically in a controlled manner;
- wherein the phase of moving the arm vertically in a controlled manner takes place alternatively by
- a) controlling the vertical movement of the arm on the basis of the values of a first set of parameters which define the state of the bales or of the pick-up device;
- or
- b) controlling the vertical movement of the arm on the basis of the values of a second set of parameters which define the state of the bales or of the pick-up device;
- - selecting mode a) or b) according to the values of a set of selection parameters which define the state of the bales or of the pick-up device.
- The characteristics and advantages of the device and of the method according to the present invention will be evident from the following description made by way of a non-limiting example, with reference to the attached drawings, wherein:
- -
figure 1 shows an axonometric view of a pick-up device of fibre from a bale of fibre according to the present invention, according to a preferred embodiment; - -
figure 2 shows a functioning diagram of the pick-up device according to the present invention; - -
figure 3 shows a diagram of an arm of the pick-up device according to the present invention; - -
figures 4a and 4c show pick-up phases. - With reference to the attached figures, reference numeral 1 globally denotes a pick-up unit on a fibre processing line.
- The unit 1 comprises a
track 2 having a main extension along a translation axis X. The bales of fibre are positioned along thetrack 2, along one or both sides of said track, sometimes continuously, sometimes distanced from each other. Such bales occupy a pick-up area, alongside thetrack 2, on the ground. - Preferably, the unit 1 comprises an
expulsion duct 3, communicating with further devices downstream of the pick-up device, performing subsequent processing or air aspiration. For example, theexpulsion duct 3 is positioned between the rails of thetrack 2. - The unit 1 further comprises a pick-
up device 4, resting on thetrack 2 and translatable upon command along it. - In particular, the
device 4 comprises acarriage 6, for example fitted with wheels, resting on thetrack 2, and a column 8 having its main extension along a vertical axis Y, resting on thecarriage 6. - The
device 4 further comprises anarm 10 jutting out from the column so as to lie over the pick-up area where the bales are positioned; in other words the arm is shaped like a flag. - According to one embodiment, the column 8 or the
arm 10 can rotate around the vertical axis Y, to pick up fibre from the bales positioned on one or other side of thetrack 2. - The pick-
up device 4 further comprises pick-up means of the fibre from the bales, such as at least one pick-up roller of fibre from the bale, supported by thearm 10. - Preferably, the
device 4 comprises a pair of pick-up rollers rotation axes 11c, 11d. The pick-up rollers tips 12 able to tear the fibre from the bales. - Preferably, in addition, the
device 4 comprises acage 14 fitted withpressure bars 14a having a longitudinal extension and positioned vertically, distanced from therotation axes 11c, 11d, so that the tips of these project below thebars 14a to tear off the fibre. - According to a preferred embodiment, the relative distance between the
pressure bars 14a and therotation axes 11c, 11d of therollers arm 10. - The
device 4 further comprises transport means for transport of the fibre to subsequent processes, such as anaspiration duct 16 having an aspiration aperture at the point of the pick-up rollers tips 12 from the rollers. - Preferably, the
aspiration duct 16 is housed in thearm 10 and therollers expulsion duct 3, to bring the fibre to subsequent processes. - The
arm 10 can translate vertically upon command along the column 8. - In particular, the device 1 comprises transmission means able to move the arm vertically, sliding along the column and actuation means able to drive the transmission.
- For example, the actuation means comprise an
electric motor 12, preferably a permanent magnet synchronous feedback motor, that is provided with feedback means 13, for example fitted on the pick-updevice 4, and aprocessing device 13a to send themotor 12 the actuation signals. - In particular, the feedback means of the
electric motor 12, comprise a resolver and/or encoder operatively connected to the motor shaft. - The transmission means further comprise, for example, sliding guides which the
arm 10 slides on, and a kinematic chain able to transform the rotatory movement of the motor shaft into a vertical translatory movement of thearm 10. - Furthermore, the pick-up
device 4 further comprises main control means able to detect the height of the bales and to send respective signals to the actuation means to raise and/or lower the arm so that the pick-up rollers are positioned at the right height to pick-up the layer of fibre of the pre-set thickness from the free upper surface of each bale. - For example, upon start-up of the pick-up process, the
arm 10 is commanded to pass over the bales, measuring the length of the bales, in other words their extension along the direction of the track, their position and their height. The observed data is for example memorised in anestimation device 18, theestimation device 18 is operatively connected to the actuation means by theprocessing device 13a. - Furthermore, the pick-up
device 4 comprises first control means able to condition the actuation means to keep the force of thearm 10 on the bales constant. - For example, said first control means comprise the feedback means 13 of the
motor 12. - In other words, said first control means are able to control the
electric motor 12 to function at a constant torque. - Furthermore, the pick-up
device 4 comprises second control means able to condition the actuation means to keep the vertical movement of the arm constant. - For example, said second control means comprise the feedback means 13 of the
motor 12. - For example, said second control means are able to command the motor to function at a constant pitch, that is so that at each passage of the arm over the bales, the motor shaft rotates by a pre-set constant angle between one passage and the next.
- Furthermore, the pick-up
device 4 comprises enabling means 26, preferably automatic, able to actuate the first and second control means to condition the actuation means. - For example, the enabling means 26 are operatively connected to the feedback means 13 of the
motor 12 to receive signals depending on the height of thearm 10 by means of amemorisation device 32 which memorises the heights of the arm at each passage over the bales, and acomparison device 34 which estimates the heights and sends a selection signal according to the values found for the heights. - For example, the comparison device estimates the containment of the height variation within a pre-set range. If the height variation of the arm falls within the pre-set range, the
comparison device 34 sends a selection signal to activate the enabling means 26 enabling control of the actuation means by the second control means. - According to a further example, the
comparison device 34 estimates the lowering of the heights below a pre-set minimum value. If the heights are below a pre-set minimum value, thecomparison device 34 sends a further actuation selection signal to the enabling means 26 which enable conditioning of the actuation means by means of the first control means. - Preferably, moreover, the pick-up
device 4 comprises third control means 40 able to adjust the relative position of the pick-uprollers 11acage 14, and in particular the pressure bars 14a of saidcage 14. The third control means 40 are operatively connected to theprocessing device 13a. - This way, depending on the operating conditions of the
device 4 or the characteristics of the bales, the extent of the projection of thetips 12 below the pressure bars 14a can be adjusted, increasing or reducing how far the tips sink into the bales. - During normal functioning of the pick-up
device 4, the bales A-D are initially positioned beside one another, more or less continuously, to the side of thetrack 2 along the translation axis X in the pick-up area and are of variable height (figure 4a ). - After the initialisation procedures, such as that of identifying the lateral outline of the bales and of their positioning, described above, the actuation means are conditioned by the first control means.
- In other words, initially the
electric motor 12 is controlled at a constant torque. - While the
carriage 6 proceeds in the pick-up direction X to perform a passage over the bales, the main control means 18 condition the actuation means so that the arm translates vertically bringing the tips of the pick-uprollers arm 10 operates at a constant force on the bales. - While the
carriage 6 proceeds in the pick-up direction X the height of thearm 10 varies, so that the force of the arm on the bales is constant. - The density of the bales at start-up is low so that the bale is soft; operating at a constant force therefore constitutes a considerable advantage, in that the bale is compressed by the arm until it resists with a predefined force optimal for removal of the fibre. Moreover, by proceeding at a constant force, processing leads to a progressive levelling of the outline of the bales.
- If necessary, the third means of control are also active in such configuration, to vary the penetration of the tips into the fibre by adjusting the relative distance between the pressure bars 14a of the
cage 14 and the rotation axes 11c, 11d of the pick-uprollers - For example, the third control means operate to increase pick-up (by bringing the pressure bars 14a of the
cage 14 closer to the rotation axes 11c,11d of the pick-uprollers arm 10 rises, and vice versa, so as to speed up levelling of the outline of the bales. - As pick-up proceeds, the bales A-D tend to level out (
figure 4b ), until they reach a configuration in which the variation of the heights of the bales is contained within a pre-set range (I). - In such configuration, the
comparison device 34 estimates the containment of the heights of the free surfaces of the bales within the pre-set range I and sends a second selection signal to the enabling means 26 so that the second control means are enabled and therefore said second control means condition the actuation means; the actuation means therefore operate so as to keep the lowering of thearm 10 at each passage constant. - In other words, in such configuration the
motor 12 is controlled at a constant pitch which ensures constant lowering of the arm. - Such condition is particularly advantageous when the bales being processed in this phase are very soft, or contain synthetic or "pigneuse" fibre. The prior machines rather, in such condition, reveal considerable drawbacks, especially if the arm is controlled at a constant force; in such case the arm shows a tendency to sink, pushing to the ground laps of bales or entire bales, especially at the sides of the row of bales.
- Moreover, in such condition the machine according to the invention proves particularly advantageous for processing traditional fibres such as cotton, for which the density of the bales is greater than in the previous condition and operating at a constant pitch is extremely advantageous for maintaining levelling of the outline and speeding up pick-up.
- If necessary, the third means of control are also active in such configuration, to vary the penetration of the tips into the fibre by adjusting the relative distance between the pressure bars 14a of the
cage 14 and the rotation axes 11c, 11d of the pick-uprollers - As pick-up proceeds, the bales A-D tend to level out (
figure 4c ), until they reach a configuration in which the height of the bales is below a pre-set threshold value L. In this condition, the bales are not high enough to be elastic, feeling the hardness of the floor; the density of the bales is, additionally, once again low. - In such configuration, the
comparison device 34 detects that the height of thearm 10 is below the pre-set threshold value L and sends a first selection signal to the enabling means 26 so that the first control means are enabled and therefore said first control means condition the actuation means; the actuation means therefore operate so as to maintain the force of the arm on the bales constant. - In other words, in such configuration the
motor 12 is again controlled at a constant torque. - If necessary, the third means of control are also active in such configuration, to vary the penetration of the tips into the fibre by adjusting the relative distance between the pressure bars 14a of the
cage 14 and the rotation axes 11c, 11d of the pick-uprollers - In such configuration, it is again extremely advantageous to operate at a constant force, to prevent the residual part of the bales from being torn in segments from the cylinders, in a random, untidy manner.
- Innovatively, the pick-up device and method according to the present invention operate in an excellent manner on all the configurations of the bales, from start-up of pick-up from new bales to the end of pick-up from almost exhausted bales.
- Moreover, the pick-up device and method according to the present invention also operate excellently on bales of fibres of varying origin, that is with natural fibres, such as cotton and with fibres from combing discards or with synthetic fibres.
Claims (19)
- Pick-up device (4) of fibre from a bale of fibre comprising:- an arm (10) able to translate above the bales (A-D) along a horizontal pick-up axis (X), fitted with pick-up means able to pick-up the fibre from the free surface of the bales;- transport means able to transport the picked-up fibre to subsequent processes, said transport means being operatively connected to said pick-up means;- actuation means able to move the arm (10) vertically in a controlled manner;- first control means able to condition the actuation means to control the vertical movement of the arm (10) on the basis of the values of a first set of parameters which define the state of the bales or of the pick-up device;- second control means able to condition the actuation means to control the vertical movement of the arm (10) on the basis of the values of a second set of parameters which define a further state of the bales or of the pick-up device;- enabling means able to activate the first control means or the second control means according to the values of a set of selection parameters, which define a state of the bales or of the pick-up device, to condition said actuation means by means of the first control means or the second control means.
- Device according to claim 1, wherein the first control means are able to condition the actuation means to keep the force of the arm (10) on the bales constant.
- Device according to any of the previous claims, wherein the second control means are able to condition the actuation means to keep the translation of the arm (10) constant at each passage over the bales.
- Device according to any of the previous claims, wherein the actuation means comprise an electric motor (12).
- Device according to claim 4, wherein the electric motor is a synchronous feedback motor.
- Device according to claim 4 or 5, wherein the first control means and/or the second control means comprise the feedback means (13) of the electric motor (12).
- Device according to claim 5 or 6, wherein the feedback means comprise a resolver and/or encoder mounted on the electric motor.
- Device according to any of the previous claims, wherein the enabling means are able to detect physical characteristics of the bales or a functioning state of the pick-up device and to send a selection signal, and actuation means (26) able to select the first control means or the second control means to condition the actuation means.
- Device according to claim 8 when dependent on claim 6, wherein the enabling means are connected to the feedback means by means of a memorisation device (32) which memorises the heights of the arm at each passage over the bales, and a comparison device (34) which estimates the heights and sends a selection signal to the selection means (26) according to the values found for the heights.
- Device according to claim 9, wherein the comparison device (34) estimates the containment of the height variation within a pre-set range (I) and if the height variation falls within the pre-set range, the selection device sends an activation signal to the enabling means (26) which enable the control of the actuation means by the second control means.
- Device according to claim 9 or 10, wherein the comparison device (34) estimates the height of the arm and whether the height is below a pre-set minimum value (L), and sends a further selection signal to actuate the enabling means (26) which enable the conditioning of the actuation means by the first control means.
- Device according to any of the previous claims, comprising control means able to detect the height of the bales and to send respective signals to the actuation means to raise and/or lower the arm so that the pick-up means are positioned at the right height to pick up a layer of fibre from the free upper surface of each bale.
- Device according to claim 12 when dependent on claim 6, wherein the main control means comprise the feedback mechanisms of the electric motor and an estimation device (18) to process the signals coming from feedback mechanisms, wherein the estimation device (18) is operatively connected to the actuation means.
- Device according to any of the previous claims, comprising third control means (40) for the adjustment of the relative distance between pressure bars (14a) of a cage (14) and the rotation axes (11c,11d) of pick-up rollers (11a,11b), to regulate the projection of the tips (12) of the pick-up rollers (11a,11b) below said pressure bars (14a).
- Device according to any of the previous claims, comprising a track (2), a carriage (6) translating on said track and a column (8) resting on the carriage (6), from which the arm (10) juts out in the shape of a flag.
- Device according to claim 15, wherein the column (8) or the arm (10) can rotate around a vertical axis (Y) to pick-up fibre from the bales positioned on one side or the other of the track.
- Device according to any of the previous claims, wherein the pick-up means comprise at least one motorised pick-up roller (11a, 11b), supported by the arm (10), equipped on the surface with tips (12) able to tear the fibre from the bales.
- Device according to any of the previous claims, wherein the transport means comprise an aspiration duct (16) having an aspiration aperture at the point of the pick-up means.
- Method for the automatic pick-up of fibre from bales of fibre, comprising the phases of:- moving an arm (10) fitted with pick-up means onto the bales of fibre and picking-up a layer of fibre;- moving the arm (10) vertically in a controlled manner; wherein the phase of moving the arm vertically in a controlled manner takes place alternatively bya) controlling the vertical movement of the arm (10) on the basis of the values of a first set of parameters which define the state of the bales or of the pick-up device;
orb) controlling the vertical movement of the arm (10) on the basis of the values of a second set of parameters, which define a further state of the bales or of the pick-up device;- selecting mode a) or b) according to the values of a set of selection parameters, which define a state of the bales or of the pick-up device.
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| ITBS2009A000208A IT1396418B1 (en) | 2009-11-16 | 2009-11-16 | DEVICE AND METHOD FOR THE AUTOMATIC FIBER FIBER COLLECTION IN A LINE OF SPINNING. |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| EP2322701A1 EP2322701A1 (en) | 2011-05-18 |
| EP2322701B1 true EP2322701B1 (en) | 2013-03-13 |
Family
ID=42315337
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP10181313A Active EP2322701B1 (en) | 2009-11-16 | 2010-09-28 | Device and method for the automatic pick-up of fibre from a bale of fibre on a spinning line |
Country Status (4)
| Country | Link |
|---|---|
| EP (1) | EP2322701B1 (en) |
| CN (1) | CN102061535B (en) |
| BR (1) | BRPI1004600B1 (en) |
| IT (1) | IT1396418B1 (en) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN107299420A (en) * | 2016-04-15 | 2017-10-27 | 里特机械公司 | Method and bale opener for the loading force of the decollator element of calibrating bale opener |
Families Citing this family (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2013076739A2 (en) * | 2011-11-18 | 2013-05-30 | Lakshmi Machine Works Ltd. | An improved holding arrangement for plucking head field of the invention |
| CH710257A1 (en) | 2014-10-16 | 2016-04-29 | Rieter Ag Maschf | Bale. |
| CH710258A1 (en) * | 2014-10-16 | 2016-04-29 | Rieter Ag Maschf | Bale. |
| CH712410A1 (en) * | 2016-04-29 | 2017-10-31 | Rieter Ag Maschf | Bale. |
| DE102017109520A1 (en) * | 2016-08-15 | 2018-02-15 | TRüTZSCHLER GMBH & CO. KG | Bale |
| CN106637540B (en) * | 2017-02-22 | 2018-11-23 | 湖州东凯纺织有限公司 | One kind is adjustable to grab cotton trolley |
| CH714726A1 (en) | 2018-03-07 | 2019-09-13 | Rieter Ag Maschf | Low-abrasion for a bale opener. |
| DE102018110677A1 (en) * | 2018-05-04 | 2019-11-07 | TRüTZSCHLER GMBH & CO. KG | Bale opener with a machine frame in gantry design and with a arranged on the machine frame pickup unit |
| CN110241486B (en) * | 2019-06-04 | 2023-07-21 | 青岛宏大纺织机械有限责任公司 | Automatic bale detecting and flattening system of reciprocating bale plucker and control method |
| EP3789524A1 (en) | 2019-09-03 | 2021-03-10 | Maschinenfabrik Rieter AG | Bale opener |
| CN114232140B (en) * | 2021-12-27 | 2023-03-31 | 安徽翰联色纺股份有限公司 | Cotton grabbing device of reciprocating bale plucker |
Family Cites Families (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE2939890C3 (en) * | 1979-10-02 | 1982-02-25 | Schubert & Salzer Maschinenfabrik Ag, 8070 Ingolstadt | Method and device for opening and mixing fiber bales |
| IN166942B (en) * | 1985-03-22 | 1990-08-11 | Rieter Ag Maschf | |
| DE3734480A1 (en) * | 1987-10-12 | 1989-04-27 | Schubert & Salzer Maschinen | METHOD AND DEVICE FOR OPENING FIBER BALLS |
| IN172448B (en) * | 1988-02-04 | 1993-08-07 | Rieter Ag Maschf | |
| DE8908276U1 (en) * | 1988-08-02 | 1989-12-14 | Trützschler GmbH & Co KG, 4050 Mönchengladbach | Opening device for opening pressed fibre bales, e.g. cotton and rayon bales etc. |
| DE4422574A1 (en) * | 1993-09-24 | 1995-03-30 | Truetzschler Gmbh & Co Kg | Method and apparatus for removing fiber flakes from textile fiber bales, e.g. As cotton, chemical fibers o. The like. |
| ITMI20040412A1 (en) * | 2004-03-04 | 2004-06-04 | Marzoli Spa | DEVICE AND PROCEDURE FOR THE AUTOMATIC COLLECTION OF FIBERS FROM FIBER BALES |
| DE102007014612A1 (en) * | 2007-03-23 | 2008-09-25 | TRüTZSCHLER GMBH & CO. KG | Device for monitoring and securing hazardous areas on power-driven textile machines, in particular spinning preparation machines |
-
2009
- 2009-11-16 IT ITBS2009A000208A patent/IT1396418B1/en active
-
2010
- 2010-09-28 EP EP10181313A patent/EP2322701B1/en active Active
- 2010-11-11 BR BRPI1004600A patent/BRPI1004600B1/en active IP Right Grant
- 2010-11-12 CN CN201010546474.8A patent/CN102061535B/en active Active
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN107299420A (en) * | 2016-04-15 | 2017-10-27 | 里特机械公司 | Method and bale opener for the loading force of the decollator element of calibrating bale opener |
| CN107299420B (en) * | 2016-04-15 | 2022-02-18 | 里特机械公司 | Method for calibrating the loading force of a breaker element of a bale opener and bale opener |
Also Published As
| Publication number | Publication date |
|---|---|
| BRPI1004600B1 (en) | 2020-04-28 |
| CN102061535A (en) | 2011-05-18 |
| BRPI1004600A2 (en) | 2012-06-26 |
| IT1396418B1 (en) | 2012-11-23 |
| CN102061535B (en) | 2014-11-26 |
| ITBS20090208A1 (en) | 2011-05-17 |
| EP2322701A1 (en) | 2011-05-18 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP2322701B1 (en) | Device and method for the automatic pick-up of fibre from a bale of fibre on a spinning line | |
| KR101800502B1 (en) | System and method for feeding metal wires at constant tension | |
| EP1951464B1 (en) | Multiple wire machine for cutting stone materials | |
| CN101863398B (en) | Wire-arranging mechanism of multi-head wire-rewinding machine | |
| US4707888A (en) | Method and arrangement for extracting fiber flocks from textile fiber bales | |
| CN101580983A (en) | Intelligent anti-folding and edge loosening device and method of two-for-one twister | |
| EP2893069B2 (en) | Device for compensating variable transport speeds of a nonwoven fabric | |
| CN101736451B (en) | Open-end spinning machine | |
| CN107848728B (en) | With the equipment of ribbon filling bar cylinder | |
| EP1979517A1 (en) | Ring spinning frame comprising a travelling cleaner and a lint removing mechanism | |
| CN108754975B (en) | Automatic shearing system for textile fabrics and shearing processing method thereof | |
| DE102007038871B4 (en) | Process for piecing on textile machines with a plurality of spinning positions | |
| CN111349988B (en) | Station for a rotor spinning machine with a cleaning unit and method for operating such a device | |
| EP1571244B1 (en) | Device and process for automatically picking up fibres from bales of fibres | |
| EP3239368B1 (en) | Process for calibrating the loading force of a breaker element of a bale opener and the bale opener | |
| ITMI950848A1 (en) | BALE REMOVAL PROCESS AND REMOVAL DEVICE FOR FIBER BALES ARRANGED ON AT LEAST ONE ROW | |
| CN100449439C (en) | Stock shoe detector and detection method thereof | |
| JP7447121B2 (en) | winding machine | |
| CN208020304U (en) | A kind of cross cutting entangles material device automatically | |
| WO2016142892A1 (en) | A carding machine | |
| CN218395723U (en) | High-precision wire harness cutting machine | |
| WO2014121812A2 (en) | Device and method for winding a strand-like material to be wound | |
| CN219093867U (en) | Sealing valve rod rounding platform | |
| CN219525689U (en) | Winding bracket for warp knitting machine | |
| EP3748051A1 (en) | Rectilinear combing machine |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| AK | Designated contracting states |
Kind code of ref document: A1 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO SE SI SK SM TR |
|
| AX | Request for extension of the european patent |
Extension state: BA ME RS |
|
| 17P | Request for examination filed |
Effective date: 20111109 |
|
| RIC1 | Information provided on ipc code assigned before grant |
Ipc: D01G 7/14 20060101ALI20111202BHEP Ipc: D01G 7/10 20060101AFI20111202BHEP |
|
| GRAP | Despatch of communication of intention to grant a patent |
Free format text: ORIGINAL CODE: EPIDOSNIGR1 |
|
| GRAS | Grant fee paid |
Free format text: ORIGINAL CODE: EPIDOSNIGR3 |
|
| GRAA | (expected) grant |
Free format text: ORIGINAL CODE: 0009210 |
|
| AK | Designated contracting states |
Kind code of ref document: B1 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO SE SI SK SM TR |
|
| REG | Reference to a national code |
Ref country code: GB Ref legal event code: FG4D |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: EP Ref country code: AT Ref legal event code: REF Ref document number: 600886 Country of ref document: AT Kind code of ref document: T Effective date: 20130315 |
|
| REG | Reference to a national code |
Ref country code: IE Ref legal event code: FG4D |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R096 Ref document number: 602010005407 Country of ref document: DE Effective date: 20130508 |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: NV Representative=s name: JACOBACCI AND PARTNERS S.P.A., CH |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: ES Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20130624 Ref country code: LT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20130313 Ref country code: BG Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20130613 Ref country code: SE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20130313 Ref country code: NO Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20130613 |
|
| REG | Reference to a national code |
Ref country code: AT Ref legal event code: MK05 Ref document number: 600886 Country of ref document: AT Kind code of ref document: T Effective date: 20130313 |
|
| REG | Reference to a national code |
Ref country code: NL Ref legal event code: VDEP Effective date: 20130313 |
|
| REG | Reference to a national code |
Ref country code: LT Ref legal event code: MG4D |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: LV Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20130313 Ref country code: FI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20130313 Ref country code: GR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20130614 Ref country code: SI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20130313 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: HR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20130313 Ref country code: BE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20130313 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20130713 Ref country code: EE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20130313 Ref country code: NL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20130313 Ref country code: RO Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20130313 Ref country code: SK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20130313 Ref country code: PT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20130715 Ref country code: AT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20130313 Ref country code: CZ Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20130313 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: PL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20130313 |
|
| PLBE | No opposition filed within time limit |
Free format text: ORIGINAL CODE: 0009261 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: NO OPPOSITION FILED WITHIN TIME LIMIT |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: DK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20130313 |
|
| 26N | No opposition filed |
Effective date: 20131216 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20130313 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R097 Ref document number: 602010005407 Country of ref document: DE Effective date: 20131216 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MC Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20130313 |
|
| REG | Reference to a national code |
Ref country code: FR Ref legal event code: ST Effective date: 20140530 |
|
| REG | Reference to a national code |
Ref country code: IE Ref legal event code: MM4A |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20130928 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: FR Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20130930 |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: PCAR Free format text: NEW ADDRESS: VIA LUGANETTO 3, 6962 LUGANO (CH) |
|
| GBPC | Gb: european patent ceased through non-payment of renewal fee |
Effective date: 20140928 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SM Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20130313 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: TR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20130313 Ref country code: CY Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20130313 Ref country code: MT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20130313 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: GB Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20140928 Ref country code: MK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20130313 Ref country code: LU Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20130928 Ref country code: HU Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT; INVALID AB INITIO Effective date: 20100928 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: AL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20130313 |
|
| P01 | Opt-out of the competence of the unified patent court (upc) registered |
Effective date: 20230523 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: CH Payment date: 20231001 Year of fee payment: 14 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: DE Payment date: 20240911 Year of fee payment: 15 |