EP2097603B1 - Actionneur electromecanique pour la manoeuvre d'un ouvrant et installation de fermeture comprenant un tel actionneur - Google Patents
Actionneur electromecanique pour la manoeuvre d'un ouvrant et installation de fermeture comprenant un tel actionneur Download PDFInfo
- Publication number
- EP2097603B1 EP2097603B1 EP07870363.4A EP07870363A EP2097603B1 EP 2097603 B1 EP2097603 B1 EP 2097603B1 EP 07870363 A EP07870363 A EP 07870363A EP 2097603 B1 EP2097603 B1 EP 2097603B1
- Authority
- EP
- European Patent Office
- Prior art keywords
- chain
- actuator
- support
- housing
- rod
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 230000033001 locomotion Effects 0.000 claims description 23
- 230000003993 interaction Effects 0.000 claims description 4
- 230000000717 retained effect Effects 0.000 claims description 2
- 230000001360 synchronised effect Effects 0.000 claims description 2
- 230000003100 immobilizing effect Effects 0.000 claims 1
- 238000013519 translation Methods 0.000 description 10
- 238000012986 modification Methods 0.000 description 3
- 230000004048 modification Effects 0.000 description 3
- 238000010276 construction Methods 0.000 description 2
- 230000000694 effects Effects 0.000 description 2
- 238000009434 installation Methods 0.000 description 2
- 230000006978 adaptation Effects 0.000 description 1
- 238000013459 approach Methods 0.000 description 1
- 230000005540 biological transmission Effects 0.000 description 1
- 238000006073 displacement reaction Methods 0.000 description 1
- 238000003754 machining Methods 0.000 description 1
- 238000012544 monitoring process Methods 0.000 description 1
- 238000004513 sizing Methods 0.000 description 1
- 238000012546 transfer Methods 0.000 description 1
Images



Classifications
-
- E—FIXED CONSTRUCTIONS
- E05—LOCKS; KEYS; WINDOW OR DOOR FITTINGS; SAFES
- E05F—DEVICES FOR MOVING WINGS INTO OPEN OR CLOSED POSITION; CHECKS FOR WINGS; WING FITTINGS NOT OTHERWISE PROVIDED FOR, CONCERNED WITH THE FUNCTIONING OF THE WING
- E05F11/00—Man-operated mechanisms for operating wings, including those which also operate the fastening
- E05F11/02—Man-operated mechanisms for operating wings, including those which also operate the fastening for wings in general, e.g. fanlights
- E05F11/04—Man-operated mechanisms for operating wings, including those which also operate the fastening for wings in general, e.g. fanlights with cords, chains or cables
- E05F11/06—Man-operated mechanisms for operating wings, including those which also operate the fastening for wings in general, e.g. fanlights with cords, chains or cables in guide-channels
-
- E—FIXED CONSTRUCTIONS
- E05—LOCKS; KEYS; WINDOW OR DOOR FITTINGS; SAFES
- E05F—DEVICES FOR MOVING WINGS INTO OPEN OR CLOSED POSITION; CHECKS FOR WINGS; WING FITTINGS NOT OTHERWISE PROVIDED FOR, CONCERNED WITH THE FUNCTIONING OF THE WING
- E05F15/00—Power-operated mechanisms for wings
- E05F15/60—Power-operated mechanisms for wings using electrical actuators
- E05F15/603—Power-operated mechanisms for wings using electrical actuators using rotary electromotors
- E05F15/611—Power-operated mechanisms for wings using electrical actuators using rotary electromotors for swinging wings
- E05F15/616—Power-operated mechanisms for wings using electrical actuators using rotary electromotors for swinging wings operated by push-pull mechanisms
- E05F15/619—Power-operated mechanisms for wings using electrical actuators using rotary electromotors for swinging wings operated by push-pull mechanisms using flexible or rigid rack-and-pinion arrangements
-
- E—FIXED CONSTRUCTIONS
- E05—LOCKS; KEYS; WINDOW OR DOOR FITTINGS; SAFES
- E05Y—INDEXING SCHEME ASSOCIATED WITH SUBCLASSES E05D AND E05F, RELATING TO CONSTRUCTION ELEMENTS, ELECTRIC CONTROL, POWER SUPPLY, POWER SIGNAL OR TRANSMISSION, USER INTERFACES, MOUNTING OR COUPLING, DETAILS, ACCESSORIES, AUXILIARY OPERATIONS NOT OTHERWISE PROVIDED FOR, APPLICATION THEREOF
- E05Y2900/00—Application of doors, windows, wings or fittings thereof
- E05Y2900/10—Application of doors, windows, wings or fittings thereof for buildings or parts thereof
- E05Y2900/13—Type of wing
- E05Y2900/148—Windows
Definitions
- the invention relates to the field of actuators for the automatic operation of the doors of the house or a building in general, type doors or windows. It also falls within the field of closure systems which include, among others, such actuators.
- Some of these actuators include an electric geared motor, capable of transmitting a movement to an arm, which pushes or pulls on the opening, depending on the direction of rotation of the geared motor.
- the arm may consist of a chain driven by a pinion, itself connected to the output shaft of the gearmotor, possibly through an angle gear.
- This chain consists of links that can nest into each other so as to stiffen the chain, so that it can be folded in one direction.
- the rigid chain makes it possible to transfer a mechanical force to pull or push the opening.
- the chain is generally folded into a housing, around a fixed guide support in the housing. It slides with respect to this guide when it is set in motion.
- DE-U-91 05 454 For maneuvering large or heavy openings, it is known to DE-U-91 05 454 to use a device combining two sets each comprising a drive member and a drive chain.
- the two drive members are electronically coupled to operate precisely at the same time.
- the differences in chain lengths or the play in the drive train create difficulties in setting and installing such a device.
- EP-A-0 777 028 describes a mechanism whose structure improves compactness and aesthetics. This mechanism is also adapted to automatically activate heavy opening or to counteract the effect of wind on windows with a wide wind, as well as to actuate side-by-side openings.
- An electric drive device, chains, idler gears and chain guides are included in a substantially closed housing provided with openings in a common face for the output of the chains.
- the guides are formed by grooves cut into the mass of the housing and in which the chains slide along their entire length. This is expensive and induces large fluctuations during the movements of the chains.
- the present invention aims to meet the various problems mentioned above, in a simple and economical way, while providing a modular structure, practical and allowing a lot of flexibility for mounting and adaptation to openings of different sizes or weight.
- the invention relates to an electromechanical actuator for operating an opening, this actuator comprising a motor, a pinion driven in rotation by the motor and a chain driven by the pinion and comprising a first end intended to be connected to the opening to operate.
- This actuator is characterized in that it also comprises a support for a part of the chain, this support being mounted free in translation along an axis perpendicular to the axis of rotation of the pinion, and provided with interaction means with the chain, these means being such that the translation movement of the support along the aforementioned axis results from the drive of the chain by the pinion.
- the position of the support along the axis in which it slides is automatically adapted, so that the support is always positioned optimally to guide the part of the chain between its second end and the drive sprocket, part of chain whose length varies according to the opening and closing movements of the opening.
- the invention also relates to a closure installation comprising a movable door between an open position and a closed position, this installation further comprising at least one actuator as mentioned above.
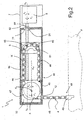
- the figure 1 schematizes in section an actuator 1 called "simple chain" for the electromechanical operation of an opening such as a window F.
- a housing 10 is provided with a first opening 11 for the passage of an output shaft 81 d an electric motor 8 housed in a second casing 7 attached to the housing 10.
- the housing 10 is elongated and X 10 is a longitudinal axis.
- X 8 is the longitudinal axis of the shaft 81 about which this shaft rotates when the motor 8 operates.
- the X 8 and X 10 axes are parallel.
- the shaft 81 allows to rotate a pinion 3 about its axis X 3, perpendicular to the drawing plane and the axes X 8 and X 10.
- a gearbox with angle gear housed in a housing 32, provides the kinematic connection between the shaft 81 and the pinion 3.
- a rod 2 is connected to the housing 32. It can be mounted fixed or rotating relative to the housing.
- the rod 2 has its longitudinal axis X 2 coincides with the axis X 8 .
- the X axis 2 can also be shifted laterally with respect to the X axis 8 , while remaining parallel thereto.
- the pinion 3 is provided with teeth, not shown, which enable it to mesh links 40 of a drive chain 4.
- This chain 4 is disposed in the housing 10 and at least partially leaves this housing 10 by a second opening 12 of it.
- the first end 41 of the chain disposed outside the housing 10 is provided with a limit switch element 43 which allows, on the one hand, to secure the chain to the window F and, on the other hand, to prevent the chain 4 from fully entering the housing 10 because the element 43 can not pass through the opening 12.
- the second end of the chain is immobilized on the housing 32 of the pinion 3 by means of a pin 49, fixed to the housing and on which is engaged the last link 40 of the chain 4.
- a support 5 comprising a guide 6 for the chain 4, and around which it folds into the housing.
- This construction makes it possible to increase the length of available chain without increasing the size of the complete actuator because of the folding of the chain on itself.
- the support 5 is slidably mounted on the rod 2. It thus forms a free slide in translation along the axis X 2 , that is to say parallel to the axes X 10 and X 81 , and guides the chain at different levels along the housing 10.
- the support or slider 5 is constituted such that it accompanies the movement of the chain in both directions of movement.
- the support 5 comprises a guide 6 in the form of a central pin 61 and a semicircle guide 62 between which the chain 4 passes.
- the chain 4 is curved around the central pin 61, about 180 °, and it forms a bearing around which slides the chain.
- the rod 2 is mounted on the housing 32 by being rotatable about its longitudinal axis X 2 and being in engagement with the gears arranged inside this housing. It is thus possible to connect the electric motor 8 disposed inside the housing 7 to the end 21 of the rod 2 opposite the housing 32, in order to transmit the rotational movement of the output shaft 81 of the motor 8 at pinion 3.
- a sleeve 82 is disposed around the end 21 and the adjacent end of the shaft 81 to rotate this shaft and the rod 2.
- a support 5 is slidably mounted along the rod 2, that is to say parallel to the axis X 2 , to the axis X 8 of rotation of the shaft 81 and at a longitudinal axis X 10 of the housing 10.
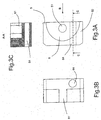
- the support 5 is more particularly visible to FIGS. 3A to 3C . It is obtained by machining a block of plastic material. It has, in an upper part, two guide elements, namely a central pin 61 and a semicircle guide 62 together forming the guide 6. In a lower part, the support 5 is provided with a hole 64 allowing its mounting with possibility of free sliding on the rod 2 which, in this embodiment, is a driving rod of the pinion 3. This hole 64 is not necessarily centered with respect to the support 5.
- the support of the first embodiment has generally the same shape as that of the second embodiment, the hole 64 being arranged differently.
- the different parts of the chain 4 are arranged in the same plane parallel to that of the figures 1 and 2 .
- the chain In its retracted position, the chain is disposed for the most part along an axis parallel to the axis X 2 , the first 44 and third 46 parts being parallel.
- the chain winds around a quarter turn around the pinion 3, so as to emerge from the housing perpendicular to the axis X 2 .
- the second end 42 of the chain 4 may itself be fixed on the support 5.
- the chain is articulated only in three parts similar to the parts 46, 47 and 48 mentioned above and the modification of length is obtained by the sliding of the support inside the housing 10, parallel to the axes X 2 , X 8 and X 10 .
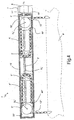
- An actuator 1 'called “double-chain” is represented at the figure 4 and consists of a housing 10 'equivalent to the housing 10 but longer and provided with a first opening 11' for the passage of the motor shaft 81.
- This drive shaft is kinematically connected through gears suitable, on the one hand, with a drive rod 2 'and, on the other hand, with a pinion 3', so that the rotation of the motor shaft about its axis X 8 causes the rotation of the rod 2 'about its longitudinal axis X 2' and the rotation of the pinion 3 'about its axis X 3' .
- the axis X 3 ' of the pinion is perpendicular to the axis X 2' of the rod 2 '.
- the pinion 3 ' is mounted on a housing 32' fixed relative to the housing 1 '.
- a set of gears, not shown and housed in the housing 32 ', is provided for driving in rotation the pinion 3' and the rod 2 '.
- the actuator is similar to the actuator described in figure 1 .
- the drive rod 2 ' is however longer than for a single chain actuator and its opposite end to the shaft 81 is connected kinematically, via appropriate gearing, with a second pinion 3 "mounted on a second housing 32 ", this portion being similar to the actuator described with respect to the figure 2 .
- the driving rod 2 ' can be rotated through the pinion 3'.
- the second pinion 3 being driven in rotation by means of the rod 2 ', it is possible, by choosing the appropriate gears, that its rotation is synchronized with that of the first pinion 3'. With the possible reversal of the directions of rotation of the gears, this synchronization being mechanical, it does not induce the disadvantages mentioned above with regard to an electronic synchronization.
- the housing 10 ' has two openings 12' and 12 "for the output of two chains 4 'and 4" respectively driven by the pinions 3' and 3 "
- the pinions 3 'and 3" are arranged substantially at the ends of the housing 1' .
- Two supports 5 'and 5 are mounted on the driving rod 2' and can slide parallel to its axis of rotation X 2 ' accompanying the movement of the chains 4' and 4".
- the supports 5 'and 5 are mounted between the gears 3' and 3" and are similar to those of the first two embodiments.
- the supports 5 'and 5 "deviate from each other when the chains 4' and 4" are driven out of the housing 10 ', which corresponds to the opening of the opening in the form of window F, and come closer to each other when the chains are driven into the housing 10 ', which corresponds to the closing of the opening.
- the supports 5 'and 5 "follow one another in a first direction, when the chains 4' and 4" are driven out of the housing 10 ', which corresponds to the opening of the opening, and in a second direction, when the chains are driven into the housing 10 ', which corresponds to the closing of the opening.
- the housing 32 'supporting the first pinion 3' is at one end of the housing 10 ', while the second housing 32 "supporting the second pinion 3" is located in a central portion of the housing 10'.
- the chains are arranged with respect to the gears and supports, as described above in relation to the single-chain actuators represented in FIGS. figures 1 or 2 .
- the actuator may comprise more than two gears, which makes it possible to control three or more chains.
- a different rod can be used to transmit motion from the pinion 3 ".
- Double-chain actuator can be made from two single-chain actuators 1 'and 1 ", one of which is devoid of motor and whose rods 2' and 2" are connected by a mechanical connecting element. such a sleeve 82.
- Such an actuator 1 is shown schematically in Figure 15.
- Each actuator 1 'or 1 “comprises a pinion 3' or 3" for controlling the movement of a chain 4 'or 4 "which is engaged in a support 5 'or 5 "movable along the rod 2' or 2" of the actuator in question.
- the structure obtained is close to that of the figure 4 , the main difference being that it is not necessary to provide a double length case, such as that 10 'of the third embodiment.
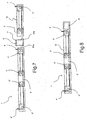
- a motor housing 7 ' can be developed so that it has two inverted axis outputs 81a and 81b on either side of the housing.
- two single-chain actuators 1a and 1b can be coupled, on either side of this motor housing, to the two outputs 81a and 81b, to form a motorized double-chain actuator.
- a single-chain actuator 1b and a dual-chain actuator 1 ' can be coupled on either side of a motor housing 7' with two outputs 81a and 81b, to form a motorized triple-chain actuator, as shown in FIG. figure 7 .
- the various motor housings shown in Figures 5 to 7 show outgoing pins on one or both sides of the case.
- a protruding motor housing can be provided.
- Two cases are then possible.
- the housing 10 or 10 'containing the chains 4, 4', 4 "has an outgoing axis, which can be coupled to the motor housing, as shown in FIG. figure 1 .
- a sleeve is used mechanical mechanism for the transmission of motion between the motor and the pinions or drive shaft, as shown in FIG. figure 2 .
- FIG. figure 8 Another embodiment-is shown in FIG. figure 8 .
- the motorized actuator 1 ' is then made in a single housing 10', the motor 8 being integrated in this housing also containing the chains 4 'and 4 ", the pinions 3' and 3", the supports 5 and 5 'and the stem 2 '.
- the second end 42 of the chains 4, 4 'or 4 is provided fixed with respect to the housing 10 and equivalent or housing 32 and equivalent or directly connected to the support 5.
- this end 42 The carrier 5, however, always drives the chain over a portion of its path.
- the second end 42 of the chain can also slide in the support 5, to a stop 66 provided in this support 5 at the output of the guide 6.
- a locking element 65 then retains the end 42 of the chain 4 in the support 5 at this stop 66, when the chain is operated to exit the housing.
- the locking element 65 is, for example, in the form of a pin, slidable in a groove 67 provided in the support 5, this groove being closed at its end to form the stop 66.
- Other embodiments of the locking element 65, the support 5 and / or the stop 66 are of course conceivable.
- the travel of the support during a maneuver can be representative of an extended chain length. It is therefore advantageous to provide an adjustable stop 52 which limits the travel of the support 5 in the direction of deployment of the chain. As represented only at figure 10 , this adjustable stop can be positioned along a strip 53 on an inner face of the housing 10 of the actuator and block the progression of the support at a given point. In the case where the second end 42 of the chain 4 is free from the support and the housing, it is possible that the chain continues to slide in the support 5 once it is blocked by the adjustable stop 52. end 42 of the chain 4 itself hangs with respect to the support 5, the extended chain length is maximum.
- the degree of opening of the opening is a function of the position of the adjustable stop 52. In this case, the stopping of the motor is determined for example by monitoring the torque or torque variations.
- the motorized actuator thus produced can meet the various constraints of sizing and weight of the openings to maneuver.
- the directions of rotation of the gears are appropriately chosen so that the chains are set in motion simultaneously and in the same direction of maneuver of the opening.
- the supports 5 and the like of the embodiments of the Figures 1 to 8 can be guided in the housings 10 and equivalents by cooperation of forms, as shown in FIGS. Figures 9 and 10 .
- the rods 2 and the like can be deleted, except when they have a drive function, in which case the clearance between the support and the rod can be increased.
Landscapes
- Power-Operated Mechanisms For Wings (AREA)
- Transmission Devices (AREA)
- Automotive Seat Belt Assembly (AREA)
- Lock And Its Accessories (AREA)
Description
- L'invention relève du domaine des actionneurs pour la manoeuvre automatique des ouvrants de la maison ou d'un bâtiment en général, de type portes ou fenêtres. Elle relève également du domaine des installations de fermeture qui comprennent, entre autres, de tels actionneurs.
- Certains de ces actionneurs comprennent un motoréducteur électrique, capable de transmettre un mouvement à un bras, qui pousse ou tire sur l'ouvrant, en fonction du sens de rotation du motoréducteur.
- Dans un tel actionneur le bras peut être constitué d'une chaîne entraînée par un pignon, lui-même relié à l'arbre de sortie du motoréducteur par l'intermédiaire éventuel d'un renvoi d'angle. Cette chaîne est constituée de maillons qui peuvent s'imbriquer les uns dans les autres de manière à rigidifier la chaîne, de telle sorte qu'elle ne puisse être pliée que dans un sens. Ainsi, la chaîne rigide permet de transférer une force mécanique pour tirer ou pousser l'ouvrant. La chaîne est généralement repliée dans un boîtier, autour d'un support de guidage fixe dans le boîtier. Elle coulisse vis à vis de ce guide lorsqu'elle est mise en mouvement.
- Pour la manoeuvre d'ouvrants larges ou lourds, il est connu de
DE-U-91 05 454 d'utiliser un dispositif combinant deux ensembles comprenant chacun un organe de motorisation et une chaîne de manoeuvre. Les deux organes de motorisation sont couplés électroniquement, de manière à fonctionner précisément en même temps. Les différences de longueurs de chaînes ou les jeux dans la chaîne cinématique créent des difficultés de réglage et d'installation d'un tel dispositif. - Selon une autre approche, on peut utiliser un mécanisme de synchronisation mécanique tel que décrit dans
US-A-1,333,595 . Ce mécanisme est destiné au pilotage de plusieurs ouvrants simultanément ou d'un ouvrant lourd ou d'une taille inhabituellement large. Un double mécanisme à chaînes et pignons-est alors utilisé, les chaînes étant reliées d'une part à l'ouvrant et d'autre part à un organe d'entraînement commun qui se déplace longitudinalement par rapport à l'ouvrant. Lors du déplacement de l'organe d'entraînement dans un premier sens d'ouverture, les chaînes sont entraînées et pliées le long de supports de guidage, de l'organe d'entraînement vers l'ouvrant, et poussent sur celui-ci pour l'ouvrir. Inversement, lors du déplacement de l'organe d'entraînement dans un deuxième sens opposé de fermeture, les chaînes sont entraînées et pliées le long des supports de guidage vers l'organe d'entraînement et tirent sur l'ouvrant pour le fermer. La structure mécanique des chaînes permet le pliage des chaînes le long des supports de guidage. - Par ailleurs,
EP-A-0 777 028 décrit un mécanisme dont la structure améliore la compacité et l'esthétique. Ce mécanisme est également adapté pour actionner automatiquement des ouvrants lourds ou pour contrer l'effet du vent sur des fenêtres offrant une large prise au vent, ainsi que pour actionner des ouvrants situés côte à côte. Un dispositif d'entraînement électrique, des chaînes, des pignons de renvoi et des guides pour les chaînes sont compris dans un boîtier sensiblement fermé, pourvu d'ouvertures dans une face commune pour la sortie des chaînes. Les guides sont formés par des rainures taillées dans la masse du boîtier et dans lesquelles glissent les chaînes sur toute leur longueur. Ceci est onéreux et induit des flottements importants lors des mouvements des chaînes. - La présente invention a pour but de répondre aux divers problèmes évoqués ci dessus, d'une manière simple et économique, tout en offrant une structure modulaire, pratique et permettant beaucoup de flexibilité pour le montage et l'adaptation à des ouvrants de différentes tailles ou poids.
- A cet effet, l'invention concerne un actionneur électromécanique pour la manoeuvre d'un ouvrant, cet actionneur comprenant un moteur, un pignon entraîné en rotation par le moteur ainsi qu'une chaîne entraînée par le pignon et comprenant une première extrémité destinée à être reliée a l'ouvrant à actionner. Cet actionneur est caractérisé en ce qu'il comprend également un support pour une partie de la chaîne, ce support étant monté libre en translationle long d'un axe perpendiculaire à l'axe de rotation du pignon, et muni de moyens d'interaction avec la chaîne, ces moyens étant tels que le mouvement de translation du support le long de l'axe précité résulte de l'entraînement de la chaîne par le pignon.
- Grâce à l'invention, la position du support le long -de l'axe selon lequel il coulisse est automatiquement adaptée, de sorte que le support est toujours positionné de façon optimale pour guider la partie de la chaîne comprise entre sa deuxième extrémité et le pignon d'entraînement, partie de chaîne dont la longueur varie en fonction des mouvements d'ouverture et de fermeture de l'ouvrant.
- Selon des aspects avantageux mais non obligatoires de l'invention, un tel actionneur peut incorporer une ou plusieurs des caractéristiques suivantes :
- les moyens d'interaction comprennent un guide dans lequel peut coulisser la chaîne, ce guide comportant deux éléments de guidage sur lesquels la chaîne vient sélectivement exercer un effort lorsqu'elle est entraînée par le pignon ;
- le support est guidé en translation par coopération de formes avec un boîtier de l'actionneur ;
- le support est monté coulissant le long d'une tige dont l'axe longitudinal est fixe par rapport au boîtier ;
- la tige est cinématiquement liée à un arbre de sortie du moteur, de sorte qu'une rotation de cet axe entraîne une rotation de la tige, alors que le support est monté de manière à coulisser librement le long de la tige ;
- la tige entraîne la rotation d'un second pignon de manière synchronisée avec le premier pignon et une deuxième chaîne est entraînée par le second pignon et supportée par un second support également monté sur la tige;
- la deuxième extrémité de la chaîne est montée fixe par rapport à un boîtier de l'actionneur. En variante, la deuxième extrémité de la chaîne est libre. Dans ce cas, la deuxième extrémité de la chaîne ou le support comprennent avantageusement un élément de blocage permettant de retenir la chaîne vis à vis du support dans une direction de mouvement de la chaîne correspondant à l'ouverture de l'ouvrant.
- L'invention concerne également une installation de fermeture comprenant un ouvrant mobile entre une position ouverte et une position fermée, cette installation comprenant, en outre, au moins un actionneur tel que mentionné ci-dessus.
- L'invention sera mieux comprise et d'autres avantages de celle-ci apparaîtront plus clairement à la lumière de la description qui va suivre de neuf modes de réalisation d'un actionneur conforme à son principe, donnée uniquement à titre d'exemple et faite en référence aux dessins annexés dans lesquels :
- la
figure 1 est une coupe longitudinale de principe d'un actionneur conforme à un premier mode de réalisation de l'invention, - la
figure 2 est une vue analogue à lafigure 1 pour un actionneur conforme à un second mode de réalisation de l'invention, - la
figure 3A est une vue de face d'un support utilisé dans l'actionneur de lafigure 2 , - la
figure 3B est une vue de côté du support dans le sens de la flèche B à lafigure 3A , - la
figure 3C est une coupe selon la ligne C-C à lafigure 3A , - la
figure 4 est une coupe analogue à lafigure 1 , quoi qu'à échelle plus petite, d'un actionneur conforme à un troisième mode de réalisation de l'invention, - la
figure 5 est une représentation schématique de principe d'un actionneur conforme à un quatrième mode de réalisation -de l'invention, - la
figure 6 est une représentation schématique de principe d'un actionneur conforme à un cinquième mode de réalisation de l'invention, - la
figure 7 est une représentation schématique de principe d'un actionneur conforme à un sixième mode de réalisation de l'invention, - la
figure 8 est une représentation schématique de principe d'un actionneur conforme à un septième mode de réalisation de l'invention, - la
figure 9 est une représentation schématique de principe d'un actionneur conforme à un huitième mode de réalisation de l'invention, et - la
figure 10 est une vue analogue à lafigure 9 pour un actionneur conforme à un neuvième mode de réalisation de l'invention. - La
figure 1 schématise en coupe un actionneur 1 dit « simple chaîne » pour la manoeuvre électro-mécanique d'un ouvrant tel qu'une fenêtre F. Un boîtier 10 est pourvu d'une première ouverture 11 pour le passage d'un arbre de sortie 81 d'un moteur électrique 8 logé dans un second boîtier 7 rapporté sur le boîtier 10. Le boîtier 10 est de forme allongée et l'on note X10 son axe longitudinal. On note X8 l'axe longitudinal de l'arbre 81 autour duquel tourne cet arbre lorsque le moteur 8 fonctionne. Les axes X8 et X10 sont parallèles. - L'arbre 81 permet d'entraîner en rotation un pignon 3 autour de son axe X3, perpendiculaire au plan du dessin et aux axes X8 et X10. Un réducteur avec renvoi d'angle, logé dans un carter 32, assure la liaison cinématique entre l'arbre 81 et le pignon 3.
- Une tige 2 est reliée au carter 32. Elle peut être montée fixe ou tournante par rapport au carter. La tige 2 a son axe longitudinal X2 confondu avec l'axe X8. L'axe X2 peut également être décalé latéralement par rapport à l'axe X8, tout en restant parallèle à celui-ci.
- Le pignon 3 est muni de dents, non représentées, qui lui permettant d'engrener des maillons 40 d'une chaîne d'entraînement 4. Cette chaîne 4 est disposée dans le boîtier 10 et sort au moins partiellement de ce boîtier 10 par une deuxième ouverture 12 de celui-ci. La première extrémité 41 de la chaîne disposée à l'extérieur du boîtier 10 est munie d'un élément de fin de course 43 qui permet, d'une part, de solidariser la chaîne à la fenêtre F et, d'autre part, d'empêcher la chaîne 4 de rentrer totalement dans le boîtier 10 car l'élément 43 ne peut pas passer à travers l'ouverture 12.
- La deuxième extrémité de la chaîne est immobilisée sur le carter 32 du pignon 3 par l'intermédiaire d'un pion 49, fixé au carter et sur lequel est engagé le dernier maillon 40 de la chaîne 4.
- Dans le boîtier 10 de l'actionneur est prévu un support 5 comprenant un guide 6 pour la chaîne 4, et autour duquel elle se replie dans le boîtier. Cette construction permet d'augmenter la longueur de chaîne disponible sans augmenter la taille de l'actionneur complet du fait du repli de la chaîne sur elle-même. Le support 5 est monté coulissant sur la tige 2. Il forme donc un coulisseau libre en translation le long de l'axe X2, c'est-à-dire parallèlement aux axes X10 et X81, et permet de guider la chaîne à différents niveaux le long du boîtier 10. Le support ou coulisseau 5 est constitué de telle manière qu'il accompagne le mouvement de la chaîne dans les deux sens de mouvement.
- Le support 5 comprend un guide 6 sous la forme d'un pion central 61 et d'un guide en demi-cercle 62 entre lesquels passe la chaîne 4. La chaîne 4 est courbée autour du pion central 61, sur environ 180°, et celui-ci forme un palier autour duquel glisse la chaîne.
- Dans le second mode de réalisation de l'invention représenté aux
figures 2 et3 , les éléments analogues à ceux du premier mode de réalisation portent les mêmes références. Dans ce mode de réalisation, la tige 2 est montée sur le carter 32 en pouvant tourner autour de son axe longitudinal X2 et en étant en prise avec les engrenages disposés à l'intérieur de ce carter. Il est ainsi possible de connecter le moteur électrique 8 disposé à l'intérieur du boîtier 7 à l'extrémité 21 de la tige 2 opposée au carter 32, ceci afin de transmettre le mouvement de rotation de l'arbre 81 de sortie du moteur 8 au pignon 3. - Un manchon 82 est disposé autour de l'extrémité 21 et de l'extrémité adjacente de l'arbre 81 afin de solidariser en rotation cet arbre et la tige 2.
- Comme dans le premier mode de réalisation, un support 5 est monté coulissant le long de la tige 2, c'est-à-dire parallèlement à l'axe X2, à l'axe X8 de rotation de l'arbre 81 et à un axe longitudinal X10 du boîtier 10.
- Le support 5 est plus particulièrement visible aux
figures 3A à 3C . Il est obtenu par usinage d'un bloc de matière plastique. Il présente, dans une partie supérieure, deux éléments de guidage, à savoir un pion central 61 et un guide en demi-cercle 62 formant ensemble le guide 6. Dans une partie inférieure, le support 5 est pourvu d'un trou 64 permettant son montage avec possibilité de coulissement libre sur la tige 2 qui, dans ce mode de réalisation, est une tige d'entraînement du pignon 3. Ce trou 64 n'est pas nécessairement centré par rapport au support 5. - Le support du premier mode de réalisation a globalement la même forme que celui du deuxième mode de réalisation, le trou 64 étant disposé différemment.
- Dans les deux modes de réalisation représentés aux
figures 1 ,2 et3A à 3C, le degré de liberté du support 5 en translation le long de l'axe X2 permet les effets suivants : - Lors d'une mise en route du moteur 8, le pignon 3 tourne et entraîne la chaîne 4. Le support 5 étant mobile parallèlement à l'axe X10 du boîtier 10, il est entraîné par la chaîne et coulisse dans le sens permettant le mouvement de la chaîne autour du pignon. Le mouvement du support 5 est donc lié à celui de la chaîne 4. Le support est tiré ou poussé le long du boîtier -par la chaîne elle-même lorsqu'elle est manoeuvrée.
- Une fois mise en place dans le boîtier 10 de l'actionneur, la chaîne s'articule donc en cinq parties, ainsi que représenté aux
figures 1 et2 : - une première partie 44 située entre la deuxième extrémité 42, et le support 5;
- une deuxième partie 45 s'enroulant partiellement dans le guide 6;
- une troisième partie 46 située entre le support 5 et le pignon d'entraînement 3 dans un même plan;
- une quatrième partie 47 s'enroulant partiellement autour du pignon d'entraînement 3;
- une cinquième partie 46 entre le pignon 3 et la première extrémité 43 de la chaîne, à l'extérieur du boîtier.
- Les différentes parties de la chaîne 4 sont disposées dans un même plan parallèle à celui des
figures 1 et2 . - Dans sa position rétractée, la chaîne est disposée pour sa majeure partie suivant un axe parallèle à l'axe X2, les première 44 et troisième 46 parties étant parallèles. La chaîne s'enroule sur un quart de tour autour du pignon 3, de manière à ressortir du boîtier perpendiculairement à l'axe X2.
- Lors d'une rotation du moteur 8 dans un premier sens, représenté par les flèches F1 aux
figures 1 et2 et visant à faire sortir la chaîne 4 du boîtier 1, le pignon 3 est lui-même entraîné en rotation dans un premier sens, représenté par les flèches F1. Les maillons de la chaîne engrènent sur le pignon 3 et sont déplacés vers l'extérieur du boîtier. Ainsi, la cinquième partie 48 de chaîne s'allonge, tandis que les première et troisième parties 44 et 46 raccourcissent. Cette modification de longueur de la chaîne entre l'extrémité 42 et le pignon 3 est possible grâce au mouvement de translation libre du support 5 parallèlement à l'axe X10 du boîtier 10 et grâce au coulissement de la chaîne dans le guide 6, autour du pion 61. - Lors d'une rotation moteur dans un deuxième sens F2 visant à rétracter la chaîne 4 dans le boîtier 1, le pignon 3 est lui-même entraîné en rotation dans un deuxième sens F'2. Les maillons de la chaîne engrènent sur le pignon 3 et sont déplacés vers l'intérieur du boîtier. Ainsi, la cinquième partie 48 de chaîne se raccourcit tandis que les premières et troisièmes parties 44 et 48 s'allongent. Cette modification de longueur-est à nouveau possible grâce au mouvement de translation libre du support 5 parallèlement à l'axe X10 du boîtier 10 et grâce au coulissement de la chaîne dans le guide 6, autour du pion 61.
- Selon une variante non représentée de l'invention, la deuxième extrémité 42 de la chaîne 4 peut être elle-même fixée sur le support 5. Dans ce cas, la chaîne s'articule uniquement en trois parties analogues aux parties 46, 47 et 48 mentionnées ci-dessus et la modification de longueur est obtenue par le coulissement du support à l'intérieur du boîtier 10, parallèlement aux axes X2, X8 et X10.
- Les modes de réalisation représentés aux
figures 1 et2 présentent l'avantage d'offrir plus de longueur de chaîne pour une longueur totale de boîtier équivalente à celle de la variante non représentée. - Un actionneur 1' dit "double-chaîne" est représenté à la
figure 4 et se compose d'un boîtier 10' équivalent au boîtier 10 mais plus long et muni d'une première ouverture 11' pour le passage -de l'arbre moteur 81. Cet arbre moteur est relié cinématiquement, par l'intermédiaire d'engrenages appropriés, d'une part, avec une tige d'entraînement 2' et, d'autre part, avec un pignon 3', de sorte que la rotation de l'arbre moteur autour de son axe X8 entraîne la rotation de la tige d'entraînement 2' autour de son axe longitudinal X2' et la rotation du pignon 3' autour de son axe X3'. L'axe X3' du pignon est perpendiculaire à l'axe X2' de la tige 2'. Le pignon 3' est monté sur un carter 32' fixe par rapport au boîtier 1'. Un ensemble d'engrenages, non représenté et logé dans le carter 32', est prévu aux fins d'entraînement en rotation du pignon 3' et de la tige 2'. En cela, l'actionneur est similaire à l'actionneur décrit à lafigure 1 . - La tige d'entraînement 2' est cependant plus longue que pour un actionneur simple chaîne et son extrémité opposée à l'arbre 81 est reliée cinématiquement, par l'intermédiaire d'engrenages appropriés, avec un deuxième pignon 3" monté sur un deuxième carter 32", cette partie étant similaire à l'actionneur décrit relativement à la
figure 2 . - Selon une variante de l'invention, la tige d'entraînement 2' peut être entraînée en rotation par l'intermédiaire du pignon 3'.
- Le deuxième pignon 3" étant entraîne en rotation par l'intermédiaire de la tige 2', il est possible, en choisissant les engrenages appropriés, que sa rotation soit synchronisée avec celle du premier pignon 3'. Par synchronisation, on entend synchronisation des vitesses, avec une éventuelle inversion des sens de rotation des pignons. Cette synchronisation étant mécanique, elle n'induit pas les inconvénients mentionnés ci-dessus au sujet d'une synchronisation électronique.
- Le boîtier 10' comporte deux ouvertures 12' et 12" pour la sortie de deux chaînes 4' et 4" entraînées respectivement par les pignons 3' et 3". Les pignons 3' et 3" sont disposés sensiblement aux extrémités du boîtier 1'. Deux supports 5' et 5" sont montés sur la tige d'entraînement 2' et peuvent coulisser parallèlement à son axe de rotation X2' en accompagnant le mouvement des chaînes 4' et 4". Les supports 5' et 5" sont montés entre les pignons 3' est 3" et sont similaires à ceux des deux premiers modes de réalisation.
- Les supports 5' et 5" s'écartent l'un de l'autre lorsque les chaînes 4' et 4" sont entraînées vers l'extérieur du boîtier 10', ce qui correspond à l'ouverture de l'ouvrant en forme de fenêtre F, et se rapprochent l'un de l'autre lorsque les chaînes sont entraînées vers l'intérieur du boîtier 10', ce qui correspond à la fermeture de l'ouvrant.
- Dans un autre mode de réalisation, non représenté, les supports 5' et 5" se suivent dans un premier sens, lorsque les chaînes 4' et 4" sont entraînées vers l'extérieur du boîtier 10', ce qui correspond à l'ouverture de l'ouvrant, et dans un deuxième sens, lorsque les chaînes sont entraînées vers l'intérieur du boîtier 10', ce qui correspond à la fermeture de l'ouvrant. Dans cette forme de réalisation, le carter 32' supportant le premier pignon 3' se situe à une extrémité du boîtier 10', alors que le deuxième carter 32" supportant le deuxième pignon 3" se situe dans une partie médiane du boîtier 10'.
- Dans les différents cas, les chaînes sont disposées vis à vis des pignons et des supports, comme décrit ci-dessus en relation avec les actionneurs à simple chaîne représentés aux
figures 1 ou2 . - Selon des variantes non représentées de l'invention, l'actionneur peut comprendre plus de deux pignons, ce qui permet de commander trois chaînes ou plus. Dans ce cas, la tige 2' se prolonge au-delà de l'intervalle entre les pignons 3' et 3" à la
figure 4 . En variante, une tige différente peut être utilisée pour transmettre le mouvement à partir du pignon 3". - Diverses constructions des différents éléments de l'actionneur sont possibles, en cherchant avantageusement à rationaliser le nombre de pièces différentes.
- Les
figures 5 à 7 permettent de visualiser différentes utilisations -des actionneurs simple ou double-chaîne décrits ci-dessus. - Un autre type d'actionneur à double chaîne peut être réalisé à partir de deux actionneurs à simple chaîne 1' et 1" dont l'un est dépourvu de moteur et dont les tiges 2' et 2" sont connectées par un élément de liaison mécanique tel qu'un manchon 82. Un tel actionneur 1 est schématisé à la figure 15. Chaque actionneur 1' ou 1" comprend un pignon 3'ou 3" permettant de commander les déplacements d'une chaîne 4' ou 4" qui est engagée dans un support 5' ou 5" mobile le long de la tige 2' ou 2" de l'actionneur en question. La structure obtenue est voisine de celle de la
figure 4 , la différence principale étant qu'il n'est pas nécessaire de prévoir un boîtier de longueur double, tel que celui 10' du troisième mode de réalisation. - Par ailleurs, comme représenté à la
figure 6 , un boîtier moteur 7' peut être développé de manière à ce qu'il dispose de deux sorties d'axe inversées 81a et 81b de part et d'autre du boîtier. Ainsi, deux actionneurs simple chaîne 1a et 1b peuvent être accouplés, de part et d'autre de ce boîtier moteur, aux deux sorties 81a et 81b, pour former un actionneur motorisé double chaîne. - Enfin, d'autres combinaisons sont possibles, de manière à réaliser des actionneurs motorisés à trois ou quatre chaînes. Ainsi, un actionneur simple chaîne 1b et un actionneur double chaîne 1' peuvent être accouplés de part et d'autre d'un boîtier moteur 7' à deux sorties 81a et 81b, pour former un actionneur motorisé triple chaîne, comme illustré à la
figure 7 . - Les différents boîtiers de moteur représentés aux
figures 5 à 7 montrent des axes sortants d'un ou des deux côtés du boîtier. Alternativement, un boîtier de moteur sans protubérance peut être prévu. Deux cas de figure sont alors possibles. Dans un premier cas, le boîtier 10 ou 10' contenant les chaînes 4, 4', 4" dispose d'un axe sortant, qui peut être accouplé au niveau du boîtier moteur, comme représenté à lafigure 1 . Dans un deuxième cas, on utilise un manchon mécanique pour la transmission de mouvement entre le moteur et les pignons ou la tige d'entraînement, comme représenté à lafigure 2 . - Une autre forme de réalisation-est représentée à la
figure 8 . L'actionneur motorisé 1' est alors réalisé dans un seul boîtier 10', le moteur 8 étant intégré dans ce boîtier contenant également les chaînes 4' et 4", les pignons 3' et 3", les supports 5 et 5' et la tige 2'. - Dans les modes de réalisation ci-dessus, la deuxième extrémité 42 des chaînes 4, 4' ou 4" est prévue fixe par rapport au boîtier 10 et équivalent ou du carter 32 et équivalent ou directement connectée au support 5. Cependant, cette extrémité 42 peut être prévue libre vis à vis du boîtier et du support. Le support 5 conduit cependant toujours la chaîne sur une partie de son trajet.
- Dans ce cas, comme représenté à la
figure 9 , il est avantageux de prévoir sur la chaîne 4 ou sur le support 5, un élément de blocage 65 qui bloque le passage de la deuxième extrémité 42 de la chaîne 4 dans le guide 6. Ainsi, dans le cas où la chaîne est manoeuvrée pour sortir du boîtier, si par exemple le support 5 est retenu par flottement, la chaîne peut coulisser dans le guide 6 jusqu'à ce que l'élément de blocage 65 retienne la chaîne 4 vis à vis du support 5 en venant en appui contre une face 51 du support tournée vers le pignon 3. Puis, si l'entraînement de la chaîne 4 se poursuit, celle-ci entraîne le support en translation. Lorsque la chaîne rentre dans le boîtier de l'actionneur, et si à l'inverse elle est retenue par frottement dans le support 5, celui-ci peut coulisser jusqu'au bout de sa course et la chaîne glisser par la suite dans le guide 6. Ces mouvements de chaîne et de support peuvent également avoir lieu simultanément. - Pour gagner encore sur la longueur de chaîne disponible et comme représenté à la
figure 10 , la deuxième extrémité 42 de la chaîne peut également coulisser dans le support 5, jusqu'à une butée 66 prévue dans ce support 5 à la sortie du guide 6. Un élément de blocage 65 retient alors l'extrémité 42 de la chaîne 4 dans le support 5 au niveau de cette butée 66, lorsque la chaîne est manoeuvrée pour sortir du boîtier. L'élément de blocage 65 se présente, par exemple, sous la forme d'un pion, pouvant coulisser dans une gorge 67 prévue dans le support 5, cette gorge étant fermée à son extrémité pour former la butée 66. D'autres formes de réalisation de l'élément de blocage 65, du support 5 et/ou de la butée 66 sont bien entendu envisageables. - Dans ce mode de réalisation, il n'est pas prévu de tige de guidage et le support 5 est guidé en translation par coopération de formes avec les faces internes du boîtier 10.
- Dans toutes les formes de réalisation présentées, la course du support lors d'une manoeuvre peut être représentative d'une longueur de chaîne déployée. Il est donc avantageux de prévoir une butée réglable 52 qui limite la course du support 5 dans le sens de déploiement de la chaîne. Comme représenté uniquement à la
figure 10 , cette butée réglable peut être positionnée le long d'une réglette 53 sur une face intérieure du boîtier 10 de l'actionneur et bloquer la progression du support en un point donné. Dans le cas où la deuxième extrémité 42 de la chaîne 4 est libre vis à vis du support et du boîtier, il se peut que la chaîne continue de coulisser dans le support 5 une fois Celui-ci bloqué par la butée réglable 52. Lorsque l'extrémité 42 de la chaîne 4 elle-même se bloque vis à vis du support 5, la longueur de chaîne déployée est maximale. Ainsi, le degré d'ouverture de l'ouvrant est fonction de la position de la butée réglable 52. Dans ce cas, l'arrêt du moteur est déterminé par exemple, par surveillance du couple ou des variations de couple. - Différentes autres combinaisons sont bien entendu envisageables, l'actionneur motorisé ainsi réalisé pouvant répondre aux différentes contraintes de dimensionnement et de poids des ouvrants à manoeuvrer.
- Plusieurs dimensionnements de moteurs peuvent également être prévus pour fournir les puissances nécessaires.
- Dans tous les modes de réalisation faisant intervenir plus d'une chaîne, les sens de rotation des pignons sont choisis de manière appropriée pour que les chaînes soient mises en mouvement simultanément et dans un même sens de manoeuvre de l'ouvrant.
- Les caractéristiques techniques des modes de réalisation envisagés ci-dessus peuvent être combinées entre elles. En particulier, les supports 5 et équivalents des modes de réalisation des
figures 1 à 8 peuvent être guidés dans les boîtiers 10 et équivalents par coopération de formes, comme représenté auxfigures 9 et 10 . Dans ce cas, les tiges 2 et équivalentes peuvent être supprimées, sauf lorsqu'elles ont une fonction d'entraînement, auquel cas le jeu entre le support et la tige peut être augmenté.
Claims (10)
- Actionneur électromécanique (1) pour la manoeuvre d'un ouvrant (F), comprenant un moteur (8), un boîtier (10,10'), pignon (3, 3') entraîné en rotation par le moteur et une chaîne (4, 4') entraînée par le pignon et comprenant une première extrémité (41) destinée à être reliée à l'ouvrant (F) à actionner, l'actionneur (1) comprenant également un support (5, 5', 5") pour une partie (45) de la chaîne (4, 4'), caractérisé en ce que ce support est monté libre en translation le long d'un axe (X2, X10) perpendiculaire à l'axe (X3) de rotation du pignon (3) et muni de moyens (6, 6', 6") d'interaction avec la chaîne qui comprennent un guide (6) dans lequel la chaîne (4) peut coulisser et autour duquel la chaîne (4) se replie dans le boîtier, tels que le mouvement de translation du support le long de l'axe (X2, X10) résulte de l'entraînement de la chaîne par le pignon.
- Actionneur selon la revendication 1, caractérisé en ce que les moyens d'interaction (6) comprennent un guide (6, 6', 6") dans lequel peut coulisser la chaîne (4, 4', 4"), ce guide (6, 6', 6") comportant deux éléments de guidage (61, 62, 61', 62', 61", 62") sur lesquels la chaîne vient sélectivement exercer un effort lorsqu'elle est entraînée par le pignon (3, 3').
- Actionneur selon l'une des revendications 1 ou 2, caractérisé en ce que le support (5) est guidé en translation par coopération de formes avec un boîtier (10) de l'actionneur.
- Actionneur selon l'une des revendications 1 ou 2, caractérisé en ce que le support (5, 5', 5") est monté coulissant le long d'une tige(2, 2', 2") dont l'axe longitudinal (X2, X2') est fixe par rapport au boîtier (10, 10', 10").
- Actionneur selon la revendication 4, caractérisé en ce que la tige (2) est cinématiquement liée à un arbre de sortie (81) du moteur(8), de sorte qu'une rotation de cet axe entraîne une rotation de la tige (2), et en ce que le support (5) est monté de manière à coulisser librement le long de la tige (2).
- Actionneur selon la revendication 5, caractérisé en ce que la tige (2, 2') entraîne la rotation d'un second pignon (3") de manière synchronisée avec le premier pignon (3'), et en ce qu'une deuxième chaîne (4") est entraînée par le second pignon (3") et supportée par un second support (5") également monté sur la tige (2, 2').
- Actionneur selon l'une des revendications précédentes, caractérisé en ce que la deuxième extrémité (42, 42', 42") de la chaîne (4, 4', 4") est montée fixe par rapport à un boîtier (10) de l'actionneur (1).
- Actionneur selon l'une des revendications 1 à 6, caractérisé en ce que la deuxième extrémité (42, 42', 42") de la chaîne (4, 4', 4") est libre.
- Actionneur selon la revendication 8, caractérisé en ce que la deuxième extrémité (42, 42', 42") de la chaîne (4, 4', 4") ou le support comprennent un élément de blocage (65) permettant de retenir la chaîne (4, 4', 4") vis à vis du support (5, 5', 5") dans une direction de mouvement de la chaîne (4, 4', 4") correspondant à l'ouverture de l'ouvrant.
- Installation de fermeture comprenant un ouvrant(F) mobile entre une position ouverte et une position fermée, caractérisée en ce qu'elle comprend au moins un actionneur(1, 1', 1") selon l'une des revendications précédentes.
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| FR0610524A FR2909407B1 (fr) | 2006-12-01 | 2006-12-01 | Actionneur electromecanique pour la manoeuvre d'un ouvrant et installation de fermeture comprenant un tel actionneur |
| PCT/FR2007/001968 WO2008071887A1 (fr) | 2006-12-01 | 2007-11-30 | Actionneur electromecanique pour la manoeuvre d'un ouvrant et installation de fermeture comprenant un tel actionneur |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| EP2097603A1 EP2097603A1 (fr) | 2009-09-09 |
| EP2097603B1 true EP2097603B1 (fr) | 2016-07-06 |
Family
ID=38229231
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP07870363.4A Active EP2097603B1 (fr) | 2006-12-01 | 2007-11-30 | Actionneur electromecanique pour la manoeuvre d'un ouvrant et installation de fermeture comprenant un tel actionneur |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US8468747B2 (fr) |
| EP (1) | EP2097603B1 (fr) |
| FR (1) | FR2909407B1 (fr) |
| WO (1) | WO2008071887A1 (fr) |
Families Citing this family (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| AU2010100261B4 (en) * | 2009-12-18 | 2010-09-30 | Pacific Holdings (Aust) Pty Ltd | Improved chain |
| AU2011204857B2 (en) * | 2010-07-19 | 2016-06-30 | Azuma Design Pty Limited | A chain winder |
| FR2963046B1 (fr) * | 2010-07-21 | 2013-04-05 | Somfy Sas | Actionneur pour portail ou porte de garage |
| ITBO20120439A1 (it) * | 2012-08-07 | 2014-02-08 | Window Automation Industry S R L A Socio Unico | Attuatore a catena |
| DE202014001171U1 (de) * | 2014-02-11 | 2014-04-29 | Lock Antriebstechnik Gmbh | Stellvorrichtung für einen Flügel sowie Vorrichtung zur Einstellung von mehreren Flügeln |
| CN103899180B (zh) * | 2014-04-07 | 2016-10-05 | 江汇装饰用品(鹤山)有限公司 | 一种开窗器 |
| US9970517B2 (en) * | 2015-07-28 | 2018-05-15 | Northrop Grumman Systems Corporation | Satellite boom hinge actuator using drive chain with flexible and rigid characteristics |
| GB2553589A (en) * | 2016-09-13 | 2018-03-14 | Mighton Products Ltd | Limiter assembly for a window |
| DE102018104777A1 (de) * | 2018-03-02 | 2019-09-05 | Iwis Antriebssysteme Gmbh & Co. Kg | Aktuator mit rückensteifer Kette |
| US11719035B2 (en) * | 2020-09-09 | 2023-08-08 | Joseph M. Schulz | Non-contact, automatic door hinge operator system |
Family Cites Families (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4014136A (en) * | 1974-07-18 | 1977-03-29 | Teleflex Morse Limited | Means for the opening and closing of angularly movable panels |
| DE4131762C2 (de) * | 1991-09-24 | 1997-05-22 | Winkhaus Fa August | Betätigungsvorrichtung für einen Flügel eines Fensters, einer Tür, einer Lüftungsklappe oder dergleichen |
| US5659160A (en) * | 1995-06-23 | 1997-08-19 | Otis Elevator Company | Linear belt door operator |
| DK135995A (da) * | 1995-12-01 | 1997-06-02 | Rasmussen Kann Ind As | Operator med mindst to udstillerelementer til åbning og lukning af svingbare vinduer |
| US6021605A (en) * | 1998-04-24 | 2000-02-08 | General Motors Corporation | Connector arm for power window assembly |
| DE60216414T3 (de) * | 2002-04-09 | 2010-09-09 | Vkr Holding A/S | Kompakt-Aktuator |
| ES2246673B1 (es) * | 2003-12-18 | 2007-02-16 | Klein Iberica, S.A. | Dispositivo para el accionamiento sincronizado de puertas correderas. |
| ATE546606T1 (de) * | 2006-01-25 | 2012-03-15 | Vkr Holding As | Kettenschubantrieb für fenster |
-
2006
- 2006-12-01 FR FR0610524A patent/FR2909407B1/fr not_active Expired - Fee Related
-
2007
- 2007-11-30 EP EP07870363.4A patent/EP2097603B1/fr active Active
- 2007-11-30 US US12/312,871 patent/US8468747B2/en not_active Expired - Fee Related
- 2007-11-30 WO PCT/FR2007/001968 patent/WO2008071887A1/fr active Application Filing
Also Published As
| Publication number | Publication date |
|---|---|
| US20100139171A1 (en) | 2010-06-10 |
| FR2909407B1 (fr) | 2009-01-09 |
| FR2909407A1 (fr) | 2008-06-06 |
| WO2008071887A1 (fr) | 2008-06-19 |
| EP2097603A1 (fr) | 2009-09-09 |
| US8468747B2 (en) | 2013-06-25 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP2097603B1 (fr) | Actionneur electromecanique pour la manoeuvre d'un ouvrant et installation de fermeture comprenant un tel actionneur | |
| EP0018914B1 (fr) | Lève-glace | |
| FR2977627A1 (fr) | Dispositif d'accouplement et installation domotique comprenant un tel dispositif | |
| CA2837612A1 (fr) | Ensemble d'actionnement pour inverseur de poussee pour moteur d'aeronef | |
| EP3476715A1 (fr) | Mécanisme d'ouverture/fermeture d'un ouvrant par rapport à un dormant | |
| EP1422375B1 (fr) | Dispositif d'entrainement motorisé d'un dispositif d'obturation, tel qu'une porte coulissante, d'une baie ménagée dans un véhicule, portière et véhicule correspondants | |
| EP3048043B1 (fr) | Procédé d'entraînement en rotation d'une roue d aéronef | |
| EP0723051A1 (fr) | Dispositif de commande pour toiture à ouvrant mobile | |
| WO2016020535A1 (fr) | Actionneur électromécanique d'orientation de store et gamme d'actionneurs électromécaniques | |
| WO2004059110A1 (fr) | Procede de commande d'une serrure electrique munie d'un embrayage | |
| FR3081183A1 (fr) | Systeme d'actionnement d'un volet roulant et d'une toile | |
| FR2776613A1 (fr) | Boite de vitesses a 8 ou 12 rapports regulierement etages et commandes par une seule manette, a installer sur une bicyclette ordinaire | |
| EP1255017B1 (fr) | Ensemble d'entraínement à moteur flottant de deux mécanismes, notamment pour volets à battants | |
| EP1640555B1 (fr) | Dispositif d'entraînement a débrayage automatique pour système de fermeture de bâtiment | |
| FR2815069A1 (fr) | Dispositif de deverrouillage de volets a battants entraines mecaniquement | |
| FR2807781A1 (fr) | Bati dormant comprenant un ensemble d'entrainement de volets battants | |
| FR3087474A1 (fr) | Procede de controle d'un systeme d'actionnement d'un premier et d'un second ecrans et systeme d'actionnement | |
| EP1865140B1 (fr) | Dispositif d'entraînement en ouverture ou en fermeture d'un ouvrant coulissant, et ouvrant coulissant équipé d'un tel dispositif d'entraînement | |
| EP1541794B1 (fr) | Dispositif d'entraînement de porte de garage | |
| EP1653034A1 (fr) | Dispositif de commande de volets battants | |
| FR2928169A1 (fr) | Ensemble d'ouverture et de fermeture motorisee pour ouvrant/battant | |
| EP0584002B1 (fr) | Agencement de verrouillage d'un organe mobile de fermeture d'une ouverture, tel qu'une porte | |
| FR2697577A1 (fr) | Mécanisme à débrayage automatique pour l'actionnement des stores et autres dispositifs de fermeture à enroulement. | |
| FR2703396A1 (fr) | Dispositif pour commander l'ouverture et la fermeture d'un battant tel qu'un volet. | |
| FR2934311A1 (fr) | Dispositif d'entrainement d'un organe mobile en deplacement |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| 17P | Request for examination filed |
Effective date: 20090611 |
|
| AK | Designated contracting states |
Kind code of ref document: A1 Designated state(s): AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HU IE IS IT LI LT LU LV MC MT NL PL PT RO SE SI SK TR |
|
| DAX | Request for extension of the european patent (deleted) | ||
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R079 Ref document number: 602007046934 Country of ref document: DE Free format text: PREVIOUS MAIN CLASS: E05F0011060000 Ipc: E05F0015619000 |
|
| GRAP | Despatch of communication of intention to grant a patent |
Free format text: ORIGINAL CODE: EPIDOSNIGR1 |
|
| RIC1 | Information provided on ipc code assigned before grant |
Ipc: E05F 15/619 20150101AFI20160114BHEP Ipc: E05F 11/06 20060101ALN20160114BHEP |
|
| INTG | Intention to grant announced |
Effective date: 20160204 |
|
| GRAS | Grant fee paid |
Free format text: ORIGINAL CODE: EPIDOSNIGR3 |
|
| GRAA | (expected) grant |
Free format text: ORIGINAL CODE: 0009210 |
|
| AK | Designated contracting states |
Kind code of ref document: B1 Designated state(s): AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HU IE IS IT LI LT LU LV MC MT NL PL PT RO SE SI SK TR |
|
| REG | Reference to a national code |
Ref country code: GB Ref legal event code: FG4D Free format text: NOT ENGLISH |
|
| REG | Reference to a national code |
Ref country code: AT Ref legal event code: REF Ref document number: 810857 Country of ref document: AT Kind code of ref document: T Effective date: 20160715 Ref country code: CH Ref legal event code: EP |
|
| REG | Reference to a national code |
Ref country code: IE Ref legal event code: FG4D Free format text: LANGUAGE OF EP DOCUMENT: FRENCH |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R096 Ref document number: 602007046934 Country of ref document: DE |
|
| REG | Reference to a national code |
Ref country code: FR Ref legal event code: PLFP Year of fee payment: 10 |
|
| REG | Reference to a national code |
Ref country code: NL Ref legal event code: MP Effective date: 20160706 |
|
| REG | Reference to a national code |
Ref country code: LT Ref legal event code: MG4D |
|
| REG | Reference to a national code |
Ref country code: AT Ref legal event code: MK05 Ref document number: 810857 Country of ref document: AT Kind code of ref document: T Effective date: 20160706 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20161106 Ref country code: LT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20160706 Ref country code: NL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20160706 Ref country code: FI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20160706 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: PT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20161107 Ref country code: ES Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20160706 Ref country code: BE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20161130 Ref country code: PL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20160706 Ref country code: GR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20161007 Ref country code: AT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20160706 Ref country code: LV Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20160706 Ref country code: SE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20160706 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R097 Ref document number: 602007046934 Country of ref document: DE |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: RO Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20160706 Ref country code: EE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20160706 |
|
| PLBE | No opposition filed within time limit |
Free format text: ORIGINAL CODE: 0009261 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: NO OPPOSITION FILED WITHIN TIME LIMIT |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: CZ Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20160706 Ref country code: DK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20160706 Ref country code: BG Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20161006 Ref country code: SK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20160706 |
|
| 26N | No opposition filed |
Effective date: 20170407 |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: PL |
|
| GBPC | Gb: european patent ceased through non-payment of renewal fee |
Effective date: 20161130 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: LI Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20161130 Ref country code: CH Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20161130 |
|
| REG | Reference to a national code |
Ref country code: IE Ref legal event code: MM4A |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20160706 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: LU Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20161130 |
|
| REG | Reference to a national code |
Ref country code: FR Ref legal event code: PLFP Year of fee payment: 11 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20161130 Ref country code: GB Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20161130 |
|
| REG | Reference to a national code |
Ref country code: BE Ref legal event code: MM Effective date: 20161130 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: HU Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT; INVALID AB INITIO Effective date: 20071130 Ref country code: CY Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20160706 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MC Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20160706 Ref country code: TR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20160706 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20160706 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R082 Ref document number: 602007046934 Country of ref document: DE Representative=s name: LAVOIX MUNICH, DE Ref country code: DE Ref legal event code: R081 Ref document number: 602007046934 Country of ref document: DE Owner name: SOMFY ACTIVITIES SA, FR Free format text: FORMER OWNER: SOMFY SAS, CLUSES, FR Ref country code: DE Ref legal event code: R081 Ref document number: 602007046934 Country of ref document: DE Owner name: SOMFY ACTIVITES SA, FR Free format text: FORMER OWNER: SOMFY SAS, CLUSES, FR |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R082 Ref document number: 602007046934 Country of ref document: DE Representative=s name: LAVOIX MUNICH, DE Ref country code: DE Ref legal event code: R081 Ref document number: 602007046934 Country of ref document: DE Owner name: SOMFY ACTIVITES SA, FR Free format text: FORMER OWNER: SOMFY ACTIVITIES SA, CLUSES, FR |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: DE Payment date: 20211110 Year of fee payment: 15 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: IT Payment date: 20221109 Year of fee payment: 16 Ref country code: FR Payment date: 20221129 Year of fee payment: 16 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R119 Ref document number: 602007046934 Country of ref document: DE |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: DE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20230601 |