EP2090941B1 - Mechanical oscillator - Google Patents
Mechanical oscillator Download PDFInfo
- Publication number
- EP2090941B1 EP2090941B1 EP08101699A EP08101699A EP2090941B1 EP 2090941 B1 EP2090941 B1 EP 2090941B1 EP 08101699 A EP08101699 A EP 08101699A EP 08101699 A EP08101699 A EP 08101699A EP 2090941 B1 EP2090941 B1 EP 2090941B1
- Authority
- EP
- European Patent Office
- Prior art keywords
- balance
- oscillator
- zero
- oscillator according
- designed
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 230000010355 oscillation Effects 0.000 claims description 22
- 210000000056 organ Anatomy 0.000 claims 9
- 230000007423 decrease Effects 0.000 description 8
- 230000000694 effects Effects 0.000 description 6
- 230000007547 defect Effects 0.000 description 5
- 230000007935 neutral effect Effects 0.000 description 4
- 230000009471 action Effects 0.000 description 3
- 241000965477 Darksidea delta Species 0.000 description 2
- 238000010586 diagram Methods 0.000 description 2
- 238000012423 maintenance Methods 0.000 description 2
- 230000004044 response Effects 0.000 description 2
- 229910000831 Steel Inorganic materials 0.000 description 1
- 239000012072 active phase Substances 0.000 description 1
- 230000008859 change Effects 0.000 description 1
- 230000002301 combined effect Effects 0.000 description 1
- 239000012073 inactive phase Substances 0.000 description 1
- 230000007246 mechanism Effects 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 238000005457 optimization Methods 0.000 description 1
- 230000003071 parasitic effect Effects 0.000 description 1
- 230000001105 regulatory effect Effects 0.000 description 1
- 230000000284 resting effect Effects 0.000 description 1
- 230000035945 sensitivity Effects 0.000 description 1
- 239000010959 steel Substances 0.000 description 1
- 239000000725 suspension Substances 0.000 description 1
- 238000005303 weighing Methods 0.000 description 1
- 238000004804 winding Methods 0.000 description 1
- 230000003245 working effect Effects 0.000 description 1
Images

Classifications
-
- G—PHYSICS
- G04—HOROLOGY
- G04B—MECHANICALLY-DRIVEN CLOCKS OR WATCHES; MECHANICAL PARTS OF CLOCKS OR WATCHES IN GENERAL; TIME PIECES USING THE POSITION OF THE SUN, MOON OR STARS
- G04B1/00—Driving mechanisms
- G04B1/10—Driving mechanisms with mainspring
- G04B1/22—Compensation of changes in the motive power of the mainspring
-
- G—PHYSICS
- G04—HOROLOGY
- G04B—MECHANICALLY-DRIVEN CLOCKS OR WATCHES; MECHANICAL PARTS OF CLOCKS OR WATCHES IN GENERAL; TIME PIECES USING THE POSITION OF THE SUN, MOON OR STARS
- G04B17/00—Mechanisms for stabilising frequency
Definitions
- the present invention relates to mechanical oscillators, especially those which equip the timepieces. It relates, more particularly, such an oscillator with a device for adjusting and correcting its frequency.
- a first object of the invention is to provide an oscillator for a mechanical watch equipped with means for correcting the isochronism defect induced by the variations of the engine torque of the mainspring, according to a principle of correction as a function of the amplitude.
- the object of the invention is to be able to maintain a constant frequency of the oscillator, in its useful range of operation, based on the amplitude variations to correct an effect comparable to a non-linearity of the spring of recall.
- the present invention relates to a mechanical oscillator of the type comprising an oscillating system mounted on a frame and formed of a rocker and its return spring.
- This oscillator further comprises a frequency correction device formed of at least a first and a second element respectively fixed to said frame and to the oscillating system, the first of these elements comprising a resilient flexible blade fixed by one of its ends and the second being a connecting member weighing, during part of the oscillation, against the free end of said blade.
- the oscillator according to the invention may comprise only one flexible blade but, advantageously, it comprises two acting in opposition on the connecting member and offset, with respect to each other, a half-cycle of the oscillation, in order to symmetrize the characteristic of the return correction as a function of the deflection.
- the single blade - or both blades - is fixed - or are fixed - to the frame via an interface allowing a position adjustment in translation and rotation.
- the single blade - or both blades - is - or are - in contact, at a non-zero pressure, with the connecting member when the balance is in the neutral position, that is to say say when its angle relative to its rest position is equal to zero, so as to obtain an increase in the frequency when the amplitude decreases (negative correction).
- the single blade - or the two blades - is - or is not - in contact, at a non-zero pressure, with the connecting member when the balance is in a neutral position, so that to obtain an increase of the frequency when the amplitude increases (positive correction).
- the connecting member may be fixed to the balance either directly or by an intermediate piece of the return spring oscillating at a reduced deflection angle relative to that of the balance.
- the oscillator may advantageously comprise a fixed stop located opposite the connecting member for a deflection angle of the balance relative to its rest position equal to zero, and intended to exert a prestress on said blade when said connecting member n is not in contact.
- the oscillator for mechanical watch according to the invention is particularly applicable to the exhaust system described in the document EP 1 736 838 , already cited, in particular in Figure 2a.
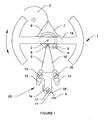
- a rocker 1 (partially shown) oscillating about its axis 2 and its return spring, or spiral spring, 3 fixed between the arm 1a of the beam and the frame 4 of the watch.
- an escape wheel 5 is driven by two elastic blades 6 and 7, connected to the arm 1a of the balance 1 by one end and whose other end, or pallet, engages in the teeth (not shown) of the wheel exhaust 5.
- the oscillating system By oscillating, under the impulse of a driving torque delivered by a mainspring, the oscillating system (balance 1 and spiral 3) rotates the escapement wheel 5 at a rate which must be as regular as possible, because he determines the accuracy of the watch he controls.
- mechanical watches and, more particularly, those equipped with an exhaust system as just described suffer from a defect of isochronism that can result in a difference of about ten seconds a day for a variation of the engine torque of ten percent, corresponding to an amplitude variation of five percent.
- the principle of the invention is to provide the oscillator with a correction device 20 having a frequency characteristic inverse to its own in the operating range.
- the correction device 20 comprises two resilient blades 9 and 10 which bear, in opposition, on a connecting member or stop 8, T-shaped, connected to the arm 1 a of the balance 1, to the nearest of its center of rotation.
- These elastic blades 9 and 10 are, via lugs 12 and 13, linked at their other end to a fixing and adjusting interface 11 by means of locking screws 15 and 16, respectively.
- the interface 11, secured to the frame 4 by a screw 17, can be positioned relative to the axis 2 of the beam by moving it along a slide 14 of the frame against which it is applied under the action of a spring 18.
- the interface 11 makes it possible to adjust the position of the fulcrum of the elastic blades 9 and 10 on the connecting member 8 and, therefore, their effective length and their stiffness.
- the lugs 12 and 13 make it possible to adjust the orientation of these elastic blades with respect to the stop and, thereby, to adjust the angle of deflection of the rocker relative to its rest position for which they come in contact or leave. this same stop.
- the position adjustment thus makes it possible to adjust the amplitude of the frequency variation, while the adjustment of the contact angle makes it possible to adjust the useful deflection range as well as the sign of the non-linearity.
- the two elastic blades 9 and 10 are in contact with the stop 8 and they constitute an additional spring which acts on the balance in addition to the spiral spring 3. If the amplitude of the oscillations increases, it happens a moment when one of the blades ceases to be in contact with the stop, thus modifying the elastic constant of the overall return spring. This creates a negative non-linearity (i.e., a decrease in slope) in the response of this global return spring, as will be discussed later with respect to the figure 2 , and it is this non-linearity that makes it possible to compensate for the positive isochronism defect mentioned above (that is to say, a frequency which increases when the amplitude increases).
- the frequency of the oscillator decreases as the maintenance torque and the oscillation amplitude decrease. It is therefore necessary to apply a negative compensation, that is to say produce a lower average return stiffness at high amplitudes.
- the figure 2 shows the curve of the additional return moment generated by the blades as a function of the deflection angle of the balance relative to its rest position, that is to say the variation of the torque ⁇ M as a function of the deflection D.
- the dotted upper curve is relative to the blade 10
- the dotted lower curve is relative to the blade 9
- the solid line curve is relative to the combined effect of the two blades.
- the global curve versus deflection has a slope of 2. ⁇ K (K is the elastic constant of the global return spring) due to the action of two elastic strips 9 and 10 added to that of the spiral spring 3.
- K is the elastic constant of the global return spring
- the slope of the response curve is only ⁇ K, which corresponds to the fact that there is only one elastic blade (9 or 10) bearing on the abutment 8.
- the slope 2. ⁇ K is constant.
- the torque correction ⁇ M as a function of deflection is no longer linear and the average slope lies between 2. ⁇ K at small amplitudes and ⁇ K at large amplitudes.
- the useful area of correction is in the vicinity, but outside, of the interval A-B.
- ⁇ K E . b . h 3 / 4.
- E the Young's modulus
- b the width of the strip
- L the effective length
- R the pivoting radius of the stop.
- E 200,000 N / mm 2 (for steel)
- b is of the order of 0.5 mm
- L 8 mm
- R goal is 1 mm. It can therefore be deduced, using the preceding formulas, that the thickness h of the blade is of the order of 10 -5 m.
- Such a blade can be cut into a sheet 10 microns thick and folded to allow attachment.
- the figure 3 illustrates a variant of adjustment of the orientation of the elastic blades, in which they are positioned in such a way that they are not in contact with the stop when the balance is in the neutral position (deflection angle equal to zero) but contact for a deflection angle A or B. That is to say that ⁇ M is zero in the range between A and B and slope ⁇ M outside this range. Consequently, the frequency variation ⁇ f is the opposite of that described above and allows therefore to correct a negative dependence as a function of the driving torque.
- the correction device can operate with a single elastic blade.
- the overall curve (solid line) of the torque ⁇ M merges with one of the two dotted curves of the Figures 2 and 3 .
- the answer is asymmetrical, the correction operating only on a single alternation of the oscillation of the balance.
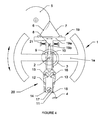
- the connecting member 8 is fixed, not on the rocker 1, but on an intermediate piece 19, T-shaped and serving as an anchor, whose horizontal bar 19a (on the figure) is the base of the elastic blades 6 and 7 and whose vertical bar 19b (in the figure) is mounted, free to oscillate, on the axis 2 of the balance 1.
- the spiral spring 3 is then fixed between the arm 1 a pendulum and the vertical bar 19b, which is subject, moreover, to the action of two return springs 21, acting in opposition.
- the provision of the figure 4 has the effect of reducing the angle of oscillation of the anchor 19 relative to that of the balance 1, which allows, on the one hand, to use more rigid blades and, on the other hand, to avoid excessive deformation and friction.
- the figure 5 shows yet another variant with a fixed stop 22 linked to the frame 4 facing the abutment 8 for a deflection angle of the balance 1 relative to its rest position equal to zero.
- This stop serves to connect and disconnect under prestressing the elastic blades 9 and 10 of the movable connecting member 8.
- an oscillator advantageously usable in a mechanical timepiece, which is provided with means for correcting the defect of isochronism induced by the variations of the engine torque.
- the correction performed is all the more effective as the amplitude-defect isochronism equilibrium is stable, which is the case of an elastic suspension balance such as, for example, that of the figure 5 of the document EP 1 736 838 , already quoted.
Landscapes
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Springs (AREA)
- Inductance-Capacitance Distribution Constants And Capacitance-Resistance Oscillators (AREA)
Description
La présente invention se rapporte aux oscillateurs mécaniques, notamment ceux qui équipent les garde-temps. Elle concerne, plus particulièrement, un tel oscillateur doté d'un dispositif de réglage et de correction de sa fréquence.The present invention relates to mechanical oscillators, especially those which equip the timepieces. It relates, more particularly, such an oscillator with a device for adjusting and correcting its frequency.
Les oscillateurs conventionnels qui équipent les garde-temps mécaniques comprennent, classiquement, un élément ressort, ou spiral, permettant le rappel en position neutre d'un élément régulateur, ou balancier. L'énergie dissipée par l'oscillation est compensée par l'application d'un couple moteur fourni par un ressort de charge, ou ressort de barillet. Cependant, ce couple d'entraînement exercé par le ressort de barillet varie au cours du temps en fonction de la charge (ou état de remontage) de ce dernier et, dans la plupart des garde-temps mécaniques, notamment lorsque le barillet est couplé directement aux rouages de la chaîne dynamique, cette variation a pour effet de modifier l'amplitude d'oscillation ainsi que, dans une certaine mesure, la période de l'oscillateur. Une telle modification peut se traduire, pour certaines réalisations, par une déviation d'une à plusieurs dizaines de secondes par jour.Conventional oscillators that equip mechanical timepieces conventionally comprise a spring element, or spiral, allowing the return to the neutral position of a regulating element, or balance. The energy dissipated by the oscillation is compensated by the application of a motor torque provided by a load spring, or barrel spring. However, this driving torque exerted by the mainspring varies over time depending on the load (or reassembly state) of the latter and, in most mechanical timepieces, especially when the cylinder is coupled directly. to the workings of the dynamic chain, this variation has the effect of modifying the amplitude of oscillation as well as, to a certain extent, the period of the oscillator. Such a modification can be translated, for some embodiments, by a deviation of one to several tens of seconds per day.
Pour compenser l'effet de la variation d'intensité du couple moteur, il a été proposé d'utiliser un dispositif appelé fusée (voir le « Dictionnaire professionnel illustré de l'horlogerie » de G. A. Berner), qui permet de régulariser la force motrice transmise au rouage par le ressort de barillet. Toutefois, un tel dispositif est difficilement miniaturisable et, pour cette raison, ne peut pas être réellement appliqué dans les montres mécaniques.To compensate for the effect of motor torque variation, it has been proposed to use a device called a rocket (see GA Berner's "Professional Illustrated Dictionary of Watchmaking"), which helps to regulate the driving force. transmitted to the wheel by the mainspring. However, such a device is difficult to miniaturize and, for this reason, can not be really applied in mechanical watches.
Un autre dispositif de correction a été décrit en relation avec la figure 7 de la demande de brevet européen
Toutefois, aucun de ces dispositifs de correction ne permet de tenir compte des variations de couple qui seraient dues à des frottements existant, par exemple, au niveau des différentes pièces incluant l'oscillateur ainsi que les rouages de transmission du couple moteur à ce dernier.However, none of these correction devices makes it possible to take into account the variations in torque that would be due to friction existing, for example, at the level of the various parts including the oscillator as well as the gear trains for transmitting torque to the latter.
En régime d'oscillation quasi-permanent, c'est-à-dire lorsque l'intensité du couple moteur varie suffisamment lentement par rapport à la période d'oscillation, on peut admettre que la variation de période induite est équivalente à celle qui serait induite par un couple de rappel non linéaire en fonction de la déflexion. Un tel défaut d'isochronisme peut être corrigé par une non linéarité inverse du ressort de rappel.In a quasi-permanent oscillation regime, that is to say when the intensity of the engine torque varies sufficiently slowly with respect to the oscillation period, it can be assumed that the induced period variation is equivalent to that which would be induced by a nonlinear booster torque depending on the deflection. Such an isochronism defect can be corrected by a non-linearity of the return spring.
Un premier but de l'invention est de fournir un oscillateur pour montre mécanique doté de moyens de correction du défaut d'isochronisme induit par les variations du couple moteur du ressort de barillet, selon un principe de correction en fonction de l'amplitude.A first object of the invention is to provide an oscillator for a mechanical watch equipped with means for correcting the isochronism defect induced by the variations of the engine torque of the mainspring, according to a principle of correction as a function of the amplitude.
Plus généralement, le but de l'invention est de pouvoir maintenir une fréquence constante de l'oscillateur, dans son domaine utile de fonctionnement, en se basant sur les variations d'amplitude pour corriger un effet assimilable à une non-linéarité du ressort de rappel.More generally, the object of the invention is to be able to maintain a constant frequency of the oscillator, in its useful range of operation, based on the amplitude variations to correct an effect comparable to a non-linearity of the spring of recall.
De façon concrète, la présente invention concerne un oscillateur mécanique du type comportant un système oscillant monté sur un bâti et formé d'un balancier et de son ressort de rappel. Cet oscillateur comporte, en outre, un dispositif de correction de fréquence formé d'au moins un premier et un deuxième éléments fixés respectivement audit bâti et au système oscillant, le premier de ces éléments comprenant une lame flexible élastique fixée par une de ses extrémités et le deuxième étant un organe de liaison venant peser, pendant une partie de l'oscillation, contre l'extrémité libre de ladite lame.Concretely, the present invention relates to a mechanical oscillator of the type comprising an oscillating system mounted on a frame and formed of a rocker and its return spring. This oscillator further comprises a frequency correction device formed of at least a first and a second element respectively fixed to said frame and to the oscillating system, the first of these elements comprising a resilient flexible blade fixed by one of its ends and the second being a connecting member weighing, during part of the oscillation, against the free end of said blade.
L'oscillateur selon l'invention peut ne comporter qu'une seule lame flexible mais, de façon avantageuse, il en comporte deux agissant en opposition sur l'organe de liaison et en décalage, l'une par rapport à l'autre, d'une demi-alternance de l'oscillation, afin de symétriser la caractéristique de la correction de rappel en fonction de la déflexion.The oscillator according to the invention may comprise only one flexible blade but, advantageously, it comprises two acting in opposition on the connecting member and offset, with respect to each other, a half-cycle of the oscillation, in order to symmetrize the characteristic of the return correction as a function of the deflection.
Dans les deux cas, la lame unique - ou les deux lames - est fixée - ou sont fixées - au bâti par l'intermédiaire d'une interface permettant un réglage de position en translation et en rotation.In both cases, the single blade - or both blades - is fixed - or are fixed - to the frame via an interface allowing a position adjustment in translation and rotation.
Selon un premier réglage de position, la lame unique - ou les deux lames - est - ou sont - en contact, selon une pression non nulle, avec l'organe de liaison lorsque le balancier est en position neutre, c'est-à-dire lorsque son angle par rapport à sa position de repos est égal à zéro, de façon à obtenir une augmentation de la fréquence lorsque l'amplitude diminue (correction négative).According to a first position adjustment, the single blade - or both blades - is - or are - in contact, at a non-zero pressure, with the connecting member when the balance is in the neutral position, that is to say say when its angle relative to its rest position is equal to zero, so as to obtain an increase in the frequency when the amplitude decreases (negative correction).
Selon un deuxième réglage de position, la lame unique - ou les deux lames - n'est - ou ne sont - pas en contact, selon une pression non nulle, avec l'organe de liaison lorsque le balancier est en position neutre, de façon à obtenir une augmentation de la fréquence lorsque l'amplitude augmente (correction positive).According to a second position adjustment, the single blade - or the two blades - is - or is not - in contact, at a non-zero pressure, with the connecting member when the balance is in a neutral position, so that to obtain an increase of the frequency when the amplitude increases (positive correction).
L'organe de liaison peut être fixé au balancier soit directement, soit par une pièce intermédiaire du ressort de rappel oscillant selon un angle de déflexion réduit par rapport à celui du balancier.The connecting member may be fixed to the balance either directly or by an intermediate piece of the return spring oscillating at a reduced deflection angle relative to that of the balance.
L'oscillateur peut avantageusement comporter une butée fixe située en regard de l'organe de liaison pour un angle de déflexion du balancier par rapport à sa position repos égal à zéro, et destinée à exercer une précontrainte sur ladite lame lorsque ledit organe de liaison n'est pas au contact.The oscillator may advantageously comprise a fixed stop located opposite the connecting member for a deflection angle of the balance relative to its rest position equal to zero, and intended to exert a prestress on said blade when said connecting member n is not in contact.
D'autres objets, caractéristiques et avantages de la présente invention seront mieux compris à la lecture de la description suivante d'exemples de réalisation particuliers, ladite description étant faite à titre purement illustratif et en relation avec les dessins joints dans lesquels :
- la
figure 1 est un schéma de principe d'un oscillateur selon l'invention, avec le dispositif de correction agissant directement sur le balancier ; - la
figure 2 montre une courbe du moment de correction de l'oscillateur en fonction de l'angle de déflexion, pour une correction négative ; - la
figure 3 montre une courbe du moment de correction de l'oscillateur en fonction de l'angle de déflexion, pour une correction positive ; - la
figure 4 est un schéma de principe d'un oscillateur selon l'invention, avec le dispositif de correction agissant directement sur une pièce intermédiaire oscillant à amplitude réduite ; - la
figure 5 illustre une variante de l'oscillateur incorporant une butée supplémentaire ; et - la
figure 6 montre une courbe du moment de correction de l'oscillateur de lafigure 5 en fonction de l'angle de déflexion.
- the
figure 1 is a block diagram of an oscillator according to the invention, with the correction device acting directly on the pendulum; - the
figure 2 shows a curve of the moment of correction of the oscillator as a function of the angle of deflection, for a negative correction; - the
figure 3 shows a curve of the moment of correction of the oscillator as a function of the angle of deflection, for a positive correction; - the
figure 4 is a block diagram of an oscillator according to the invention, with the correction device acting directly on an oscillating intermediate piece with reduced amplitude; - the
figure 5 illustrates a variant of the oscillator incorporating an additional stop; and - the
figure 6 shows a curve of the moment of correction of the oscillator of thefigure 5 depending on the angle of deflection.
L'oscillateur pour montre mécanique selon l'invention est particulièrement applicable au système d'échappement décrit dans le document
Selon l'enseignement du document
En oscillant, sous l'impulsion d'un couple moteur dispensé par un ressort de barillet, le système oscillant (balancier 1 et spiral 3) entraîne en rotation la roue d'échappement 5 à un rythme qui doit être aussi régulier que possible, car il détermine la précision de la montre qu'il contrôle. Or, comme cela a été mentionné précédemment, les montres mécaniques et, plus particulièrement, celles équipées d'un système d'échappement tel qu'il vient d'être décrit, souffrent d'un défaut d'isochronisme pouvant se traduire par un écart de quelque dix secondes par jour pour une variation du couple moteur de dix pourcent, correspondant à une variation d'amplitude de cinq pourcent. Un tel écart tient au fait que, contrairement aux systèmes d'échappement libre, tels que ceux dits à ancre suisse, l'ancre particulière du document EP précité est, par l'intermédiaire de ses lames élastiques, en contact permanent avec la roue d'échappement 5. Au cours de sa décharge, le couple moteur du ressort de barillet décroît, ce qui entraîne une diminution correspondante de l'amplitude d'oscillation de l'oscillateur (pour maintenir l'équilibre avec la puissance dissipée) et aussi de sa fréquence par l'effet du contact permanent. Pour de petites variations, correspondant au domaine de fonctionnement, on peut admettre que la fréquence varie linéairement avec les variations du couple moteur.By oscillating, under the impulse of a driving torque delivered by a mainspring, the oscillating system (
Le principe de l'invention consiste à doter l'oscillateur d'un dispositif de correction 20 ayant une caractéristique de fréquence inverse de la sienne dans le domaine de fonctionnement.The principle of the invention is to provide the oscillator with a
A cet effet, le dispositif de correction 20 comporte deux lames élastiques 9 et 10 qui s'appuient, en opposition, sur un organe de liaison ou butée 8, en forme de T, lié au bras 1 a du balancier 1, au plus proche de son centre de rotation. Ces lames élastiques 9 et 10 sont, via des ergots 12 et 13, liées, par leur autre extrémité, à une interface de fixation et de réglage 11 grâce à des vis de blocage 15 et 16, respectivement.For this purpose, the
L'interface 11, rendue solidaire du bâti 4 par une vis 17, peut être positionnée par rapport à l'axe 2 du balancier en la déplaçant le long d'une glissière 14 du bâti contre laquelle elle est appliquée sous l'action d'un ressort 18.The
L'interface 11 permet de régler la position du point d'appui des lames élastiques 9 et 10 sur l'organe de liaison 8 et, donc, leur longueur effective et leur raideur. Les ergots 12 et 13 permettent de régler l'orientation de ces lames élastiques par rapport à la butée et, par là même, de régler l'angle de déflexion du balancier par rapport à sa position de repos pour lequel elles entrent en contact ou quittent cette même butée. Le réglage de position permet ainsi d'ajuster l'amplitude de la variation de fréquence, tandis que le réglage de l'angle de contact permet d'ajuster le domaine de déflexion utile ainsi que le signe de la non linéarité.The
Selon le mode de réalisation de la
Si l'on considère une lame élastique dont l'extrémité se trouve sur le chemin de la trajectoire d'une butée oscillante, la lame étant sensiblement perpendiculaire à cette trajectoire, lorsque la déflexion D passe par une valeur Φ0 (point A ou B de la
Dans le cas du document EP précité, la fréquence de l'oscillateur diminue lorsque le couple d'entretien et l'amplitude d'oscillation diminuent. Il convient donc d'appliquer une compensation négative, c'est-à-dire produire une rigidité de rappel moyenne plus faible aux fortes amplitudes.In the case of the aforementioned EP document, the frequency of the oscillator decreases as the maintenance torque and the oscillation amplitude decrease. It is therefore necessary to apply a negative compensation, that is to say produce a lower average return stiffness at high amplitudes.
La
Pour de petites déflexions, soit entre les angles de limite de contact A et B, la courbe globale en fonction de la déflexion a une pente de 2.ΔK (K étant la constante élastique du ressort de rappel global) due à l'action des deux lames élastiques 9 et 10 ajoutée à celle du ressort spiral 3. Pour une déflexion au-delà du point B ou en deçà du point A, la pente de la courbe de réponse n'est plus que ΔK, ce qui correspond au fait qu'il n'y a plus qu'une seule lame élastique (9 ou 10) en appui sur la butée 8.For small deflections, either between the contact limit angles A and B, the global curve versus deflection has a slope of 2.ΔK (K is the elastic constant of the global return spring) due to the action of two
Dans l'intervalle de déflexion A-B, la pente 2.ΔK est constante. Lorsque l'oscillation du balancier est comprise dans cet intervalle, la variation de fréquence Δf, par rapport à la fréquence f en l'absence du dispositif correcteur, est donc constante et vaut Δf = f.ΔK / K. Lorsque l'amplitude d'oscillation dépasse l'intervalle A-B, la correction de couple ΔM en fonction de la déflexion n'est plus linéaire et la pente moyenne se trouve comprise entre 2.ΔK aux petites amplitudes et ΔK aux grandes amplitudes. La variation de fréquence correspondante passe de Δf = f.ΔK / K aux petites amplitudes à Δf = f.ΔK / 2.K aux grandes amplitudes. La zone utile de correction se trouve au voisinage, mais en dehors, de l'intervalle A-B.In the deflection range A-B, the slope 2.ΔK is constant. When the oscillation of the balance is within this range, the frequency variation Δf, with respect to the frequency f in the absence of the corrector device, is therefore constant and is equal to Δf = f.ΔK / K. When the amplitude of oscillation exceeds the AB interval, the torque correction ΔM as a function of deflection is no longer linear and the average slope lies between 2.ΔK at small amplitudes and ΔK at large amplitudes. The corresponding frequency variation changes from Δf = f.ΔK / K to small amplitudes at Δf = f.ΔK / 2.K at large amplitudes. The useful area of correction is in the vicinity, but outside, of the interval A-B.
Lorsque le ressort de barillet se décharge, l'amplitude d'oscillation décroît et la variation de fréquence de correction Δf augmente, ce qui permet de compenser la diminution de fréquence que présenterait l'oscillateur non corrigé sous l'influence du couple d'entraînement.When the mainspring discharges, the oscillation amplitude decreases and the correction frequency variation Δf increases, which makes it possible to compensate for the frequency decrease that the uncorrected oscillator would have under the influence of the driving torque. .
De manière concrète, si l'on dispose d'un balancier d'inertie angulaire I = 2.5 10-9 kg.m2, correspondant à un diamètre de 10 mm pour une masse de 0,1 gr, oscillant à la fréquence f de 10 Hz, cela détermine une constante de rappel K = 4.π2.f2. I = 10-5 Nm2 / radian. L'amplitude d'oscillation Φ dépend de l'état de charge du ressort de barillet. Si l'on suppose une amplitude de l'oscillateur de 35° lorsque le ressort de barillet est à pleine charge et une amplitude de 30° lorsqu'il est déchargé, cela correspond à une variation d'amplitude d'environ 15% et à une variation du moment d'entretien de l'ordre de 30%. On posera que Φ0 correspond à l'amplitude des points A et B et approximera la correction par un ressort linéaire équivalent dont la constante de rappel ΔKequ dépend de l'amplitude Φ selon les formules suivantes (courbe en trait mixte) : ![]()
![]()
où ΔK représente la rigidité angulaire d'une lame en appui sur sa butée. Cette expression a le mérite de représenter assez bien la correction, tout en restant très simple. La sensibilité à la correction ΔKequ/ΔK est d'autant plus élevée que l'amplitude Φ est proche de Φ0.
En prenant les valeurs Φ = 35° et Φ0 = 30°, cela donne : ![]()
Cette valeur permet de calculer la correction de fréquence relative : ![]()
![]()
![]()
where ΔK represents the angular rigidity of a blade resting on its abutment. This expression has the merit of representing the correction fairly well, while remaining very simple. The sensitivity to the correction ΔK equ / ΔK is even higher than the amplitude Φ is close to Φ 0 .
Taking the values Φ = 35 ° and Φ 0 = 30 °, this gives: ![]()
This value is used to calculate the relative frequency correction: ![]()
On supposera que la variation de marche à corriger ait été mesurée à 5 sec / jour par degré d'amplitude, c'est-à-dire 25 sec / jour pour 5 degrés. En fréquence relative, cela donne : ![]()
Il faut exprimer que la somme des deux valeurs précédentes est nulle, c'est-à-dire que la correction compense l'erreur. On obtient alors : ![]()
Si on exprime ΔK en fonction des paramètres de lame, on peut écrire : ![]()
où E est le module d'Young, b est la largeur de la lame, h son épaisseur, L la longueur utile et Rbut le rayon de pivotement de la butée. Typiquement, E vaut 200'000 N / mm2 (pour de l'acier), b est de l'ordre de 0.5 mm, L vaut 8 mm et Rbut vaut 1 mm. On peut donc en déduire, en utilisant les formules précédentes, que l'épaisseur h de la lame est de l'ordre de 10-5 m. Une telle lame peut être découpée dans une feuille de 10 microns d'épaisseur et pliée pour permettre la fixation.It will be assumed that the variation of the course to be corrected was measured at 5 sec / day per degree of amplitude, that is to say 25 sec / day for 5 degrees. In relative frequency, this gives: ![]()
It must be stated that the sum of the two previous values is zero, that is, the correction compensates for the error. We then obtain: ![]()
If ΔK is expressed according to the blade parameters, we can write: ![]()
where E is the Young's modulus, b is the width of the strip, its thickness h, the effective length L and R purpose the pivoting radius of the stop. Typically, E is 200,000 N / mm 2 (for steel), b is of the order of 0.5 mm, L = 8 mm and R goal is 1 mm. It can therefore be deduced, using the preceding formulas, that the thickness h of the blade is of the order of 10 -5 m. Such a blade can be cut into a
La
Le dispositif de correction selon l'invention peut fonctionner avec une seule lame élastique. Dans ce cas, la courbe globale (en trait plein) du couple ΔM se confond avec l'une des deux courbes en pointillé des
Selon encore une autre variante, représentée à la
La disposition de la
La
Comme le montre la
Ainsi est proposé un oscillateur, avantageusement utilisable dans un garde-temps mécanique, qui est doté de moyens de correction du défaut d'isochronisme induit par les variations du couple moteur. La correction réalisée est d'autant plus efficace que la relation amplitude-défaut d'isochronisme est stable, ce qui est le cas d'un balancier à suspension élastique tel, par exemple, que celui de la
Claims (10)
- A mechanical oscillator comprising an oscillating system, mounted on a frame (4) and comprising a balance (1) and its return spring (3), and further comprising a frequency correction device (20), characterized in that said frequency correction device (20) comprises at least first and second elements fixed to said frame (4) and said oscillating system, respectively, the first of these elements comprising at least one flexible elastic strip (9, 10) fixed by one of its ends and the second being a connecting organ (8) designed to weigh, during part of the oscillation, against the free end of said strip.
- The oscillator according to claim 1, characterized in that said strip (9, 10) is designed to be in contact, according to a non-zero pressure, with said connecting organ (8) for a deflection angle of the balance (1) in relation to its idle position equal to zero.
- The oscillator according to claim 1, characterized in that said strip (9, 10) is designed to be not in contact with said connecting organ (8) for a deflection angle of the balance (1) in relation to its idle position equal to zero.
- The oscillator according to claim 1, characterized in that the first of said elements comprises two elastic strips (9, 10) designed to act in opposition bearing on the connecting organ (8) and offset, in relation to each other, by a half-vibration of the oscillation.
- The oscillator according to claim 4, characterized in that said strips (9, 10) are designed to be in contact, according to a non-zero pressure, with said connecting organ (8) for a deflection angle of the balance (1) in relation to its idle position equal to zero.
- The oscillator according to claim 4, characterized in that said strips (9, 10) are designed to be not in contact with said connecting organ (8) for a deflection angle of the balance (1) in relation to its idle position equal to zero.
- The oscillator according to anyone of claims 1 to 6, characterized in that said connecting organ (8) is fixed directly to said balance (1).
- The oscillator according to anyone of claims 1 to 6, characterized in that said connecting organ (8) is fixed to said oscillating system by an intermediate part (19) of the return spring (3) oscillating according to a deflection angle reduced relative to that of the balance (1).
- The oscillator according to anyone of claims 1 to 8, characterized in that it comprises a fixed stop (22) located across from the connecting organ (8) for a deflection angle of the balance (1) in relation to its idle position equal to zero, and designed to exert a pre-stressing on said strip when said connecting member is not in contact.
- The oscillator according to anyone of preceding claims, characterized in that said elastic strip (9, 10) is fixed to the frame (4) via an interface (11) allowing adjustment of its position in translation and in rotation.
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP08101699A EP2090941B1 (en) | 2008-02-18 | 2008-02-18 | Mechanical oscillator |
| US12/372,091 US7963693B2 (en) | 2008-02-18 | 2009-02-17 | Mechanical oscillator |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP08101699A EP2090941B1 (en) | 2008-02-18 | 2008-02-18 | Mechanical oscillator |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| EP2090941A1 EP2090941A1 (en) | 2009-08-19 |
| EP2090941B1 true EP2090941B1 (en) | 2011-10-19 |
Family
ID=39874166
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP08101699A Active EP2090941B1 (en) | 2008-02-18 | 2008-02-18 | Mechanical oscillator |
Country Status (2)
| Country | Link |
|---|---|
| US (1) | US7963693B2 (en) |
| EP (1) | EP2090941B1 (en) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP2553533B2 (en) † | 2010-04-01 | 2019-06-19 | Rolex S.A. | Device for locking a toothed wheel |
Families Citing this family (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP2105806B1 (en) * | 2008-03-27 | 2013-11-13 | Sowind S.A. | Escapement mechanism |
| EP2290476B1 (en) * | 2009-08-18 | 2014-04-23 | CSEM Centre Suisse d'Electronique et de Microtechnique SA - Recherche et Développement | Isochronism corrector for a timepiece escapement and an escapement equipped with such a corrector |
| WO2013144238A1 (en) * | 2012-03-29 | 2013-10-03 | Nivarox-Far S.A. | Flexible escapement mechanism having a plate-free balance |
| US9075394B2 (en) * | 2012-03-29 | 2015-07-07 | Nivarox-Far S.A. | Flexible escapement mechanism with movable frame |
| JP6661543B2 (en) | 2014-01-13 | 2020-03-11 | エコール・ポリテクニーク・フェデラル・ドゥ・ローザンヌ (ウ・ペ・エフ・エル)Ecole Polytechnique Federale De Lausanne (Epfl) | General two-degree-of-freedom isotropic harmonic oscillator without escapement or with simple escapement and associated time base |
| RU2686446C2 (en) * | 2014-01-13 | 2019-04-25 | Эколь Политекник Федераль Де Лозанн (Епфл) | Isotropic harmonic oscillator with at least two degrees of freedom, and corresponding controller with missing dispensing mechanism or with simplified dispensing mechanism |
| EP2911012B1 (en) * | 2014-02-20 | 2020-07-22 | CSEM Centre Suisse d'Electronique et de Microtechnique SA - Recherche et Développement | Timepiece oscillator |
| EP3076245B1 (en) | 2015-04-02 | 2021-03-17 | CSEM Centre Suisse D'electronique Et De Microtechnique SA | Damping device, in particular for micromechanical clock component |
| FR3048792B1 (en) * | 2016-03-14 | 2019-07-19 | Lvmh Swiss Manufactures Sa | DEVICE FOR WATCHMAKING PART, CLOCK MOVEMENT AND TIMEPIECE COMPRISING SUCH A DEVICE |
| US11029649B2 (en) | 2016-03-14 | 2021-06-08 | LVHM Swiss Manufactures SA | Device for timepiece, clockwork movement and timepiece comprising such a device |
| FR3048791B1 (en) | 2016-03-14 | 2018-05-18 | Lvmh Swiss Manufactures Sa | MECHANISM FOR A WATCHING PART AND A WATCHPIECE COMPRISING SUCH A MECHANISM |
| EP3299905B1 (en) | 2016-09-27 | 2020-01-08 | CSEM Centre Suisse d'Electronique et de Microtechnique SA - Recherche et Développement | Mechanical oscillator for a horological movement |
| JP7000585B2 (en) * | 2017-10-02 | 2022-01-19 | マニュファクチュール・ドルロジュリ・オーデマ・ピゲ・ソシエテ・アノニム | A clock setting device equipped with a harmonic oscillator that has a common reaction force with the rotary weight. |
Family Cites Families (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US2789414A (en) * | 1947-08-28 | 1957-04-23 | George S Andrews | Automatic regulator for timepieces |
| DE10160287A1 (en) * | 2001-12-07 | 2003-06-26 | Lange Uhren Gmbh | Tourbillon |
| FR2842313B1 (en) * | 2002-07-12 | 2004-10-22 | Gideon Levingston | MECHANICAL OSCILLATOR (BALANCING SYSTEM AND SPIRAL SPRING) IN MATERIALS FOR REACHING A HIGHER LEVEL OF PRECISION, APPLIED TO A WATCHMAKING MOVEMENT OR OTHER PRECISION INSTRUMENT |
| ATE389902T1 (en) | 2005-06-23 | 2008-04-15 | Suisse Electronique Microtech | CLOCK |
-
2008
- 2008-02-18 EP EP08101699A patent/EP2090941B1/en active Active
-
2009
- 2009-02-17 US US12/372,091 patent/US7963693B2/en not_active Expired - Fee Related
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP2553533B2 (en) † | 2010-04-01 | 2019-06-19 | Rolex S.A. | Device for locking a toothed wheel |
Also Published As
| Publication number | Publication date |
|---|---|
| US20090207700A1 (en) | 2009-08-20 |
| US7963693B2 (en) | 2011-06-21 |
| EP2090941A1 (en) | 2009-08-19 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP2090941B1 (en) | Mechanical oscillator | |
| EP1736838B1 (en) | Timepiece | |
| EP3059641B1 (en) | Oscillator with a detent escapement | |
| EP2290476B1 (en) | Isochronism corrector for a timepiece escapement and an escapement equipped with such a corrector | |
| EP2761378B1 (en) | Oscillator with tuning fork for mechanical timepiece movement | |
| EP3545368A1 (en) | Rotary resonator with a flexible guide system based on a detached lever escapement | |
| EP1605182B1 (en) | Temperature compensated hairspring-balance oscillator | |
| EP3502788B1 (en) | Standalone device for adjusting the active length of a hairspring | |
| EP3037894B1 (en) | Mechanism and method for adjusting a speed in a watch movement | |
| EP2297799A1 (en) | Autonomous piezoelectric device for generating an electrical voltage | |
| EP4187326A1 (en) | Hairspring for timepiece resonator mechanism provided with a means for adjusting stiffness | |
| WO2015010797A1 (en) | Clock movement resonator and assembly comprising such a resonator and an escapement mechanism | |
| EP2515185A1 (en) | Engine with constant torque | |
| EP4357857A1 (en) | Hairspring for timepiece resonator mechanism provided with means for adjusting the stiffness | |
| CH719913A2 (en) | Clockwork regulating organ with spiral spring provided with means of temperature compensation. | |
| EP4310600A1 (en) | Adjusting element of a timepiece with hairspring provided with temperature compensation means | |
| EP4357858A1 (en) | Hairspring for timepiece resonator mechanism provided with means for adjusting the stiffness | |
| EP4310599A1 (en) | Adjusting element of a timepiece with flexible guide provided with a means for compensating temperature | |
| CH720139A2 (en) | Spiral spring for a watch resonator mechanism provided with stiffness adjustment means. | |
| EP4325302A1 (en) | Timepiece regulating organ with hairspring-spring provided with pressure compensation means | |
| CH719183A2 (en) | Hairspring for clock resonator mechanism provided with means for adjusting the stiffness. | |
| EP3901707A1 (en) | Escapement mechanism for a timepiece | |
| CH719973A2 (en) | Clockwork regulating body with spiral spring fitted with pressure compensation means. | |
| CH707173A1 (en) | Movement assembly for mechanical watch, has pinion intended to be secured to balancer, where pinion is kinematically connected with movable intermediate gear subjected to action of spring to form resonator with balancer |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| AK | Designated contracting states |
Kind code of ref document: A1 Designated state(s): AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MT NL NO PL PT RO SE SI SK TR |
|
| AX | Request for extension of the european patent |
Extension state: AL BA MK RS |
|
| 17P | Request for examination filed |
Effective date: 20100119 |
|
| AKX | Designation fees paid |
Designated state(s): CH DE FR GB LI |
|
| 17Q | First examination report despatched |
Effective date: 20100827 |
|
| GRAP | Despatch of communication of intention to grant a patent |
Free format text: ORIGINAL CODE: EPIDOSNIGR1 |
|
| GRAC | Information related to communication of intention to grant a patent modified |
Free format text: ORIGINAL CODE: EPIDOSCIGR1 |
|
| GRAJ | Information related to disapproval of communication of intention to grant by the applicant or resumption of examination proceedings by the epo deleted |
Free format text: ORIGINAL CODE: EPIDOSDIGR1 |
|
| GRAP | Despatch of communication of intention to grant a patent |
Free format text: ORIGINAL CODE: EPIDOSNIGR1 |
|
| GRAS | Grant fee paid |
Free format text: ORIGINAL CODE: EPIDOSNIGR3 |
|
| GRAA | (expected) grant |
Free format text: ORIGINAL CODE: 0009210 |
|
| AK | Designated contracting states |
Kind code of ref document: B1 Designated state(s): CH DE FR GB LI |
|
| REG | Reference to a national code |
Ref country code: GB Ref legal event code: FG4D Free format text: NOT ENGLISH |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: EP |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: NV Representative=s name: GLN S.A. |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R096 Ref document number: 602008010543 Country of ref document: DE Effective date: 20120126 |
|
| PLBE | No opposition filed within time limit |
Free format text: ORIGINAL CODE: 0009261 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: NO OPPOSITION FILED WITHIN TIME LIMIT |
|
| 26N | No opposition filed |
Effective date: 20120720 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R097 Ref document number: 602008010543 Country of ref document: DE Effective date: 20120720 |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: PCAR Free format text: NEW ADDRESS: AVENUE EDOUARD-DUBOIS 20, 2000 NEUCHATEL (CH) |
|
| REG | Reference to a national code |
Ref country code: FR Ref legal event code: PLFP Year of fee payment: 9 |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: PFA Owner name: CSEM CENTRE SUISSE D'ELECTRONIQUE ET DE MICROT, CH Free format text: FORMER OWNER: CSEM CENTRE SUISSE D'ELECTRONIQUE ET DE MICROTECHNIQUE SA - RECHERCHE ET DEVELOPPEMENT, CH |
|
| REG | Reference to a national code |
Ref country code: FR Ref legal event code: PLFP Year of fee payment: 10 |
|
| REG | Reference to a national code |
Ref country code: FR Ref legal event code: PLFP Year of fee payment: 11 |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: NV Representative=s name: BOVARD SA NEUCHATEL CONSEILS EN PROPRIETE INTE, CH |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: FR Payment date: 20210225 Year of fee payment: 14 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: DE Payment date: 20210323 Year of fee payment: 14 Ref country code: GB Payment date: 20210324 Year of fee payment: 14 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R119 Ref document number: 602008010543 Country of ref document: DE |
|
| GBPC | Gb: european patent ceased through non-payment of renewal fee |
Effective date: 20220218 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: FR Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20220228 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: GB Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20220218 Ref country code: DE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20220901 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: CH Payment date: 20240301 Year of fee payment: 17 |