EP1908590B1 - Object transport method and printing machine - Google Patents
Object transport method and printing machine Download PDFInfo
- Publication number
- EP1908590B1 EP1908590B1 EP07291126.6A EP07291126A EP1908590B1 EP 1908590 B1 EP1908590 B1 EP 1908590B1 EP 07291126 A EP07291126 A EP 07291126A EP 1908590 B1 EP1908590 B1 EP 1908590B1
- Authority
- EP
- European Patent Office
- Prior art keywords
- cap
- printing machine
- base
- support zone
- drive
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Not-in-force
Links
- 238000007639 printing Methods 0.000 title claims description 29
- 238000000034 method Methods 0.000 title claims description 11
- 238000012546 transfer Methods 0.000 claims description 24
- 238000013459 approach Methods 0.000 claims description 8
- 230000000295 complement effect Effects 0.000 claims description 4
- 230000002093 peripheral effect Effects 0.000 claims description 2
- 230000014759 maintenance of location Effects 0.000 claims 2
- 125000006850 spacer group Chemical group 0.000 description 6
- 238000006073 displacement reaction Methods 0.000 description 3
- 239000008188 pellet Substances 0.000 description 3
- 238000013519 translation Methods 0.000 description 3
- 238000012545 processing Methods 0.000 description 2
- 230000001419 dependent effect Effects 0.000 description 1
- 238000001035 drying Methods 0.000 description 1
- 239000000428 dust Substances 0.000 description 1
- 238000012423 maintenance Methods 0.000 description 1
- 235000020004 porter Nutrition 0.000 description 1
- 238000007650 screen-printing Methods 0.000 description 1
- 230000001360 synchronised effect Effects 0.000 description 1
Images








Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B41—PRINTING; LINING MACHINES; TYPEWRITERS; STAMPS
- B41F—PRINTING MACHINES OR PRESSES
- B41F17/00—Printing apparatus or machines of special types or for particular purposes, not otherwise provided for
- B41F17/002—Supports of workpieces in machines for printing on hollow articles
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B41—PRINTING; LINING MACHINES; TYPEWRITERS; STAMPS
- B41F—PRINTING MACHINES OR PRESSES
- B41F15/00—Screen printers
- B41F15/08—Machines
- B41F15/0872—Machines for printing on articles having essentially cylindrical surfaces
Definitions
- the invention relates to a transfer device for moving elliptical or cylindrical section objects for printing on a printing machine having a rotary plate with vertical axis of rotation.
- a transfer device comprising a lifting arm provided with gripping tongs and pivotally mounted at one of its ends about an axis of rotation extending in a horizontal plane inscribed in the plane of removal of the object.
- the arm is pivotable about the axis of rotation between a loading position in which the arm extends in a vertical direction and an unloading position in which the arm extends in a horizontal direction.
- Such a device is known to FR 2,775,471 .
- this transfer device does not allow to arrange the object to be printed in a device for retaining and rotating the object for printing, comprising a base which comprises a vertical bottom and a shape rim complementary to the shape of the base of the object.
- the object can not be introduced and positioned against the bottom of the base, so as to cooperate with the rim.
- the object of the invention is to provide a transfer device enabling the object to be printed to be placed in a device for retaining and rotating the object.
- the object of the invention is
- the printing machine and the method comprise one or more of the features set forth in the dependent claims.
- the printing machine 2 comprises a not shown frame, a rotary plate 4 carried by the frame, at least one device 6 for retaining and driving the objects carried by the turntable 4, and processing stations for objects, not shown, arranged around the turntable 4.
- the turntable 4 is adapted to be rotated about a vertical axis of rotation by drive means 5 to move the objects to be printed from one processing station to another.
- the drive means 5 comprise a global cam indexer driven via a gear unit by an asynchronous motor or by a servomotor.
- the treatment stations include, for example, a loading station, represented on the figure 1 , and for example a flame station, one or more printing stations by screen printing or hot stamping, a drying station, a varnishing station and an unloading station identical to the loading station.
- the retaining and driving assembly 6 comprises a base 12 and a point 18 for retaining the opening 19 of the object, arranged opposite the base 12.
- the objects 8 are here bottles whose neck forms the opening 19.
- the base 12 consists of a vertical bottom 14 parallel to the plane defined by X and Z directions represented on the figure 1 , and a flange 16 delimiting a complementary shaped shape to the shape of the base 17 of the bottle 8.
- the tip 18 is displaceable in the Y direction toward and away from the base 12 in order to axially grip the bottle 8 between the base 12 and the tip 18.
- the tip 18 is mounted to be displaceable in translation on along two sliding columns 20.
- the base 12 is adapted to be driven axially in rotation by drive means 22. Unlike the tip, the base 12 is fixed in translation in the direction Y.
- the objects to be printed 8 are arranged with their axis of revolution disposed horizontally along the normal N2 to the plane of the bottom 17 of the base.
- the printing machine 2 further comprises a supply conveyor 24 of the printing bottles 8, and a transfer device 26 carried by the frame and adapted to move the bottles 8 of the supply conveyor 24 to the retaining and driving assembly 6.
- the printing machine 2 further comprises a discharge conveyor of the printed objects, not shown, and a not shown transfer device which ensures the unloading of the printed objects 8 from the retaining and driving assembly 6 towards the conveyor discharge.
- the supply conveyor 24 comprises a conveyor belt 28 closed in a loop and held between two parallel rolls of reversal, one of which is motorized. On this conveyor, the bottles 8 are arranged successively in alignment, with their axis of revolution arranged in the vertical direction Z, parallel to a normal N1 to the conveyor belt 28.
- the conveyor belt 28 constitutes a support range of the objects.
- the transfer device 26 is adapted to take a bottle whose base 17 is supported on the support pad 28, to transfer it to the retaining and driving device 6 by rotating it by a 90 ° angle around an axis parallel to the direction X, and to introduce its base 17 in the base 12.
- the transfer device 26 comprises a frame 30, a gripping arm 32 carried by the frame 30, and a motor 34 for moving the driving means 36 of the gripping arm 32.
- the frame 30 comprises a support plate 38 and a plate 40 forming the base of the frame 30, the plate 40 being fixed to the support plate 38 by one of its longitudinal sides 41, so that the main face of the plate 40 is extended perpendicular to the main face of the support plate 38.
- the support plate 38 has a generally rectangular shape and has a vertical extension 44 disposed opposite the plate 40.
- the support plate 38 separates a front side 45 and a rear side 47 of the transfer device 26.
- the frame 30 further comprises a beam 46 extending in the Y direction and fixed at the edge of the rear face 47 of the support plate 38, and two spacers 48 and 50 each attached to one end of the beam 46 and to a 42 side of the tray 40 opposite its ends.
- the frame 30 further comprises a hollow holding beam 54 attached to the rear face 47 of the extension 44 and to the beam 46.
- the holding beam 54 extends in the Z direction, above the beam 46.
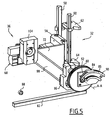
- the gripping arm 32 illustrated on the figures 4 and 5 , comprises a bracket 56, two support bars 58, 60 fixed along the longitudinal edges of the bracket 56, and two pairs 62, 64 of grip grippers slidably mounted along the support bars 58 and 60.
- the console 56 has a parallelepipedal general shape having a main face, on which the support bars 58 and 60 are fixed, and an opposite main face, on which a device 68 for actuating pairs of clamps is mounted.
- the gripping arm 32 further comprises a spacer 72 of triangular shape, one side of which is fixed to the lateral side of the bracket 56.
- the motor 34 is able to drive in translation in the Y direction a carriage 74 shown on the figures 1 , 2 and 4 .
- the drive means 36 comprise two guide rails 76,78 of the carriage 74 extending in the Y direction, a toothed wheel 80 and a rack 82 with which the gear wheel 80 is engaged.
- the guide rails 76 and 78 illustrated on the figure 2 , are fixed to the right of each other, one to the beam 46 and the other to the plate 40.
- the toothed wheel 80 has an axis of rotation A-A.
- the rack 82 is fixed to the plate 40 parallel to the rails 76 and 78.
- the drive means 36 further comprise a plate 84 supporting a groove 86, and a roller 88 having a shape adapted to cooperate with the groove 86.
- the plate 84 is integral with the rear face of the toothed wheel 80.
- the groove 86 comprises a first guide portion 90 eccentric with respect to the axis of rotation A-A of the wheel 80, and a second guide portion 92 close to the axis of rotation of the wheel 80.
- the first guide portion 90 has a profile obtained by purity so that the gripping arm 32 has an arcuate trajectory tangent to the normal N2 to the bottom plane 14 of the base.
- the second portion 92 has a profile corresponding to a cycloidal movement.
- the second groove portion 92 has a length of 1/3 to 1/2 of the total length of the groove 86.
- the roller 88 illustrated on Figures 5 to 9 , is fixed on the front face of the spacer 48 facing the rear face of the gear wheel 80.
- the rack 82 extends over a length equal to the perimeter of the gear wheel 80 at which the length of the second portion 92 of the groove is subtracted.
- the drive means 36 further comprise a shaft 94, one end of which is fixed to the center of the toothed wheel 80 parallel to the axis of rotation A-A, and a rotatable support 96 integral with the other end of the shaft 94.
- the shaft 94 is able to be rotated by the carriage 74 during the displacement thereof along the guide rails 76 and 78.
- the carriage 74 comprises a bearing 97 traversed by the shaft 94.
- the rotatable support 96 extends in a plane parallel to the plane of the toothed wheel 80. It is adapted to pivot about the axis of rotation A-A of the toothed wheel 80.
- the drive means 36 finally comprise a connecting rod 98, one end 100 of which is connected to a front face 104 of the rotary support 96, a slide 104 linked to the other end 106 of the connecting rod and a slide 110 for guiding the slide 104 .
- the slide 110 is fixed to the front face 45 of the support plate 38. It extends over the extension 44 in the Z direction.
- the slide 110 extends over a length substantially equal to the diameter of the toothed wheel 80, plus the length of the connecting rod 98.
- the end 100 of the connecting rod is fixed to the rotary support 96 at a distance from the axis of rotation A-A equal to the pitch radius of the toothed wheel 80.
- the connecting rod 98 is fixed over part of its length to one side of the spacer 72 of the gripper arm 32 to drive it in motion.
- the rod 98 has a length equal to the perimeter of the toothed wheel 80, plus the length of the first groove portion 90, divided by 2 .
- a set of power and control wiring with a general J shape ( figure 3 ) is fixed to the front face 45 of the support plate 38.
- Dust protection curtains 114 are mounted in longitudinal rails on the front face 45 of the frame.
- the printing machine 2 further comprises a control unit 115 able to control the drive means 5 of the turntable and the drive motor 34 of the gripping arm 32.
- the control unit 115 is able to temporally manage the displacement of the turntable 4 and the actuation of the motor 34 so that the movement of the gripping arm 32 is synchronized with the rotational movement of the turntable 4.
- control unit 115 is able to control the motor 34 and the drive means 5 so that the gripping arm 32 arrives at the end of the removal stroke of the object on the retaining device. drive 6, when the holding and driving device 6 is located at the right of the support surface 28.
- the control unit is also able to control the actuating device 68 of the grippers 62, 64 to control the opening and closing of each pair of grippers 62, 64 each time the gripper arm 32 is in position. end-of-stroke for gripping the object disposed on the support surface and releasing the object in the holding and driving device 6.
- the turntable 4 is adapted to pivot about its axis of rotation to dispose the device of retaining and driving 6 carried by it facing the supply conveyor 24.
- the conveyor belt 28 moves to bring the bottle 8 to the end of the supply conveyor 24.
- the drive means of the transfer device are represented on the figure 6 .
- the carriage 74, the toothed wheel 80 and the first end 100 of the connecting rod are disposed at one end of the frame 30 adjacent to the spacer 50 and the motor 34.
- the other end 106 of the connecting rod is in a low position close to the
- the support bars 58, 60 of the grip grippers 62, 64 are disposed vertically close to the bottle 8.
- the actuating device 68 is implemented so that the pairs of clamps 62, 64 enclose the bottle 8.
- the drive carriage 74 is moved to the other end of the frame 30 in the direction of the spacer 48.
- the gear wheel 80 is rotated counterclockwise on the rack 82, so that that the end 100 of the rod is rotated about the axis AA.
- the slide 104 moves on the slide 110 in the Z direction.
- the end 100 of the rod is driven in a cycloidal motion.
- the end 106 of the rod is driven in displacement in a vertical translational movement.
- the gripping arm 32 is moved in a complex movement resulting from the combination of movements of the ends 100 and 106 of the rod made simultaneously.
- the bottle 8 is first raised to disengage the conveyor 24, then the bottle is rotated to bring its axis of revolution in the horizontal direction Y.
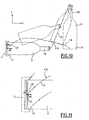
- the neck 19 is raised to move the bottle 8 away from the support pad 28 at the beginning of the trajectory 116 of the neck 19. Simultaneously, the base 17 of the bottle pivots from the beginning of the trajectory 118 of the base 17.
- the trajectory 116 of the neck 19 of the bottle and the trajectory 118 of its base 17 intersect as visible on the figures 1 and 10 .
- the base 17 passes before the neck 19 by the cross point 119.
- the roller 88 enters the second portion 92 of the groove 86 at the axis of rotation AA and is guided by the groove 86.
- the slide 104 moves on the slide 110 in the direction opposite to the Z direction.
- end 100 is displaced in a movement imposed by the second portion 92 of the groove, which has a profile corresponding to the cycloidal movement imposed during the transfer step by the toothed wheel 80 and the rack 82.
- the end 100 of the rod is moved according to a movement imposed by the first portion 90 of the groove.
- the toothed wheel 80 is no longer carried by the rack 82.
- the slide 104 moves on the slideway 110 in the direction opposite to the Z direction.
- the movement of the end 100 of the connecting rod is deflected to force the arm gripping 32 trajectories 116,118 to introduce the base 17 of the bottle in the base.
- the trajectory of the base 17 of the object has a curved portion having a point of inflection 120 in its portion 121 approaching the base 12, and comprises both a component according to the normal N1 to the range of support 28 and a component according to the normal N2 at the bottom 14 of the base.
- the trajectory 118 of the base 17 has an arcuate portion 122 tangent to the normal N2, to introduce the base 17 in the base.
- the rotary plate of the printing machine can be positioned at the same height as the conveyor belt of the conveyor or at any other height chosen, regardless of the length of the object to be printed.
- the transfer device comprises a tilting lifting arm, whose length is a function of the length of the object to be printed.
- the rotating plate carrying the devices for retaining and driving objects is positioned at a distance of high height, which requires a high weight frame and makes maintenance operations difficult on the printing stations arranged above the turntable.
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Specific Conveyance Elements (AREA)
- Feeding Of Articles By Means Other Than Belts Or Rollers (AREA)
Description
La présente invention concerne un dispositif de transfert du type destiné à déplacer un objet entre une plage de support et un culot, l'objet comportant une base et une ouverture, le culot comprenant un fond s'étendant dans un plan perpendiculaire à la plage de support et un rebord périphérique de forme complémentaire à la forme de la base de l'objet, le dispositif comportant :
- un bâti;
- au moins un bras de préhension porté par le bâti, le bras de préhension étant propre à porter l'objet à déplacer ; et
- des moyens d'entraînement portés par le bâti.
- a building;
- at least one gripping arm carried by the frame, the gripping arm being adapted to carry the object to be moved; and
- driving means carried by the frame.
En particulier, l'invention concerne un dispositif de transfert destiné à déplacer des objets à section elliptique ou cylindrique en vue de leur impression sur une machine à imprimer comportant un plateau rotatif à axe de rotation vertical.In particular, the invention relates to a transfer device for moving elliptical or cylindrical section objects for printing on a printing machine having a rotary plate with vertical axis of rotation.
Il est connu un dispositif de transfert comprenant un bras de levage muni de pinces de préhension et monté pivotant à une de ses extrémités autour d'un axe de rotation s'étendant dans un plan horizontal inscrit dans le plan de dépose de l'objet. Le bras est propre à pivoter autour de l'axe de rotation entre une position de chargement dans laquelle le bras s'étend selon une direction verticale et une position de déchargement dans laquelle le bras s'étend selon une direction horizontale. Un tel dispositif est connu de
Toutefois, ce dispositif de transfert ne permet pas de disposer l'objet à imprimer dans un dispositif de retenue et d'entraînement en rotation de l'objet en vue de son impression, comportant un culot qui comprend un fond vertical et un rebord de forme complémentaire à la forme de la base de l'objet.However, this transfer device does not allow to arrange the object to be printed in a device for retaining and rotating the object for printing, comprising a base which comprises a vertical bottom and a shape rim complementary to the shape of the base of the object.
En effet, comme le dispositif fait pivoter l'objet d'un angle droit autour d'un axe appartenant au plan de dépose de l'objet, l'objet ne peut pas être introduit et positionné contre le fond du culot, de façon à coopérer avec le rebord.Indeed, as the device rotates the object of a right angle about an axis belonging to the plane of removal of the object, the object can not be introduced and positioned against the bottom of the base, so as to cooperate with the rim.
L'invention a pour but de fournir un dispositif de transfert permettant la mise en place de l'objet à imprimer dans un dispositif de retenue et d'entraînement en rotation de l'objet.The object of the invention is to provide a transfer device enabling the object to be printed to be placed in a device for retaining and rotating the object.
A cet effet, l'invention a pour objetFor this purpose, the object of the invention is
une machine d'impression suivant la revendication 7 et un procédé de déplacement d'un objet selon la revendication 1.a printing machine according to claim 7 and a method of moving an object according to claim 1.
Suivant des modes particuliers de réalisation, la machine d'impression et le procédé comportent une ou plusieurs des caractéristiques énoncées dans les revendications dépendantes.According to particular embodiments, the printing machine and the method comprise one or more of the features set forth in the dependent claims.
L'invention sera mieux comprise à la lecture de la description qui va suivre, donnée uniquement à titre d'exemple et faite en se référant aux dessins, sur lesquels :
- la
figure 1 est une vue en perspective de face d'un convoyeur d'amenée d'un objet à imprimer et d'une machine d'impression selon l'invention ; - la
figure 2 est une vue en perspective de dos d'une partie d'un dispositif de transfert selon l'invention ; - la
figure 3 est une vue en perspective de face du dispositif de transfert de lafigure 2 ; - la
figure 4 est une vue de côté d'une partie des moyens d'entraînement et du bras de préhension du dispositif de transfert desfigures 2 et3 ; - la
figure 5 est une vue en perspective de dos d'une partie des moyens d'entraînement et du bras de préhension du dispositif de transfert ; - la
figure 6 est une vue de dos d'une partie des moyens d'entraînement et du bras de préhension, dans une position pendant la prise de l'objet ; - la
figure 7 est une vue similaire à la vue de lafigure 6 , au cours du transfert de l'objet ; - la
figure 8 est une vue similaire à la vue de lafigure 6 pendant l'approche du culot ; - la
figure 9 est une vue similaire à la vue de lafigure 6 en fin de cours d'approche du culot ; - la
figure 10 est une vue de face de l'objet à imprimer, représenté dans trois positions de transfert de l'objet et dans une position en fin de course d'approche vers le culot ; et - la
figure 11 est une vue de face agrandie représentant partiellement l'objet à imprimer, dans une position de fin de course d'approche vers le culot.
- the
figure 1 is a front perspective view of a supply conveyor of an object to be printed and a printing machine according to the invention; - the
figure 2 is a perspective view of the back of a portion of a transfer device according to the invention; - the
figure 3 is a front perspective view of the transfer device of thefigure 2 ; - the
figure 4 is a side view of a portion of the drive means and the gripper arm of the transfer device offigures 2 and3 ; - the
figure 5 is a perspective view of the back of a portion of the drive means and the gripper arm of the transfer device; - the
figure 6 is a back view of a portion of the drive means and the gripper arm, in a position during gripping of the object; - the
figure 7 is a view similar to the view of thefigure 6 , during the transfer of the object; - the
figure 8 is a view similar to the view of thefigure 6 during the approach of the pellet; - the
figure 9 is a view similar to the view of thefigure 6 at the end of the approach course of the pellet; - the
figure 10 is a front view of the object to be printed, represented in three transfer positions of the object and in a position at the end of the approach run towards the base; and - the
figure 11 is an enlarged front view partially representing the object to be printed, in an end-of-travel position approaching the base.
La machine d'impression 2 selon l'invention comporte un châssis non représenté, un plateau rotatif 4 porté par le châssis, au moins un dispositif 6 de retenue et d'entraînement des objets porté par le plateau rotatif 4, et des postes de traitement des objets, non représentés, disposés autour du plateau rotatif 4.The printing machine 2 according to the invention comprises a not shown frame, a
Le plateau rotatif 4 est propre à être entraîné en rotation autour d'un axe de rotation vertical par des moyens d'entraînement 5 pour déplacer les objets à imprimer d'un poste de traitement à l'autre.The
Les moyens d'entraînement 5 comprennent un indexeur à came globique entraîné via un réducteur par un moteur asynchrone ou par un servomoteur.The drive means 5 comprise a global cam indexer driven via a gear unit by an asynchronous motor or by a servomotor.
Les postes de traitement comprennent par exemple un poste de chargement, représenté sur la
L'ensemble de retenue et d'entraînement 6 comporte un culot 12 et une pointe 18 de retenue de l'ouverture 19 de l'objet, disposée en regard du culot 12. Les objets 8 sont ici des bouteilles dont le goulot forme l'ouverture 19.The retaining and
Le culot 12 est constitué d'un fond 14 vertical parallèle au plan défini par des directions X et Z représentées sur la
La pointe 18 est déplaçable en translation dans la direction Y vers et à l'écart du culot 12 afin d'enserrer axialement la bouteille 8 entre le culot 12 et la pointe 18. A cet effet, la pointe 18 est montée déplaçable en translation le long de deux colonnes de coulissement 20. Le culot 12 est apte à être entraîné axialement en rotation par des moyens d'entraînement 22. Contrairement à la pointe, le culot 12 est fixe en translation selon la direction Y.The
Sur l'ensemble de retenue et d'entraînement 6, les objets à imprimer 8 sont disposés avec leur axe de révolution disposé horizontalement suivant la normale N2 au plan du fond 17 du culot.On the retaining and
La machine d'impression 2 comporte en outre un convoyeur d'amenée 24 des bouteilles à imprimer 8, et un dispositif de transfert 26 porté par le châssis et adapté pour déplacer les bouteilles 8 du convoyeur d'amenée 24 à l'ensemble de retenue et d'entraînement 6.The printing machine 2 further comprises a
La machine d'impression 2 comporte en outre un convoyeur d'évacuation des objets imprimés, non représenté, et un dispositif de transfert non représenté qui assure le déchargement des objets imprimés 8 depuis l'ensemble de retenue et d'entraînement 6 vers le convoyeur d'évacuation.The printing machine 2 further comprises a discharge conveyor of the printed objects, not shown, and a not shown transfer device which ensures the unloading of the printed
Le convoyeur d'amenée 24 comporte une bande transporteuse 28 refermée en boucle et maintenue entre deux cylindres parallèles de retournement dont l'un est motorisé. Sur ce convoyeur, les bouteilles 8 sont disposées successivement en alignement, avec leur axe de révolution disposé selon la direction verticale Z, parallèlement à une normale N1 à la bande transporteuse 28.The
La bande transporteuse 28 constitue une plage de support des objets.The
Le dispositif de transfert 26 est propre à prendre une bouteille dont la base 17 est en appui sur la plage de support 28, à la transférer vers le dispositif de retenue et d'entraînement 6 en la faisant pivoter d'un angle de 90° autour d'un axe parallèle à la direction X, et à introduire sa base 17 dans le culot 12.The
Le dispositif de transfert 26 comprend un bâti 30, un bras de préhension 32 porté par le bâti 30, et un moteur 34 d'entraînement en déplacement des moyens d'entraînement 36 du bras de préhension 32.The
Le bâti 30 comporte une plaque de support 38 et un plateau 40 formant la base du bâti 30, le plateau 40 étant fixé à la plaque de support 38 par un de ses côtés longitudinaux 41, de sorte que la face principale du plateau 40 s'étende perpendiculairement à la face principale de la plaque de support 38.The
La plaque de support 38 a une forme générale rectangulaire et présente une extension verticale 44 disposée à l'opposé du plateau 40.The
La plaque de support 38 sépare un côté avant 45 et un côté arrière 47 du dispositif de transfert 26.The
Dans la suite de la description, les orientations « avant » et « arrière » seront définies par rapport à la plaque de support 38.In the remainder of the description, the "front" and "rear" orientations will be defined with respect to the
Le bâti 30 comprend en outre une poutre 46 s'étendant dans la direction Y et fixée en bordure de la face arrière 47 de la plaque de support 38, et deux entretoises 48 et 50 fixées chacune à une extrémité de la poutre 46 et à un côté 42 du plateau 40 en regard de ses extrémités.The
Le bâti 30 comprend en outre une poutre creuse de maintien 54 fixée à la face arrière 47 de l'extension 44 et à la poutre 46. La poutre de maintien 54 s'étend dans la direction Z, au-dessus de la poutre 46.The
Le bras de préhension 32, illustré sur les
La console 56 présente une forme générale parallélépipédique ayant une face principale, sur laquelle les barres de support 58 et 60 sont fixées, et une face principale opposée, sur laquelle un dispositif 68 d'actionnement des paires de pinces est monté.The
Le bras de préhension 32 comprend en outre une entretoise 72 de forme triangulaire dont un côté est fixé au côté latéral de la console 56.The
Le moteur 34 est apte à entraîner en translation selon la direction Y un chariot 74 représenté sur les
Les moyens d'entraînement 36 comprennent deux rails de guidage 76,78 du chariot 74 s'étendant dans la direction Y, une roue dentée 80 et une crémaillère 82 avec laquelle la roue dentée 80 est en prise.The drive means 36 comprise two
Les rails de guidage 76 et 78, illustrés sur la
La roue dentée 80 présente un axe de rotation A-A.The
La crémaillère 82 est fixée au plateau 40 parallèlement aux rails 76 et 78.The
Les moyens d'entraînement 36 comportent en outre une platine 84 supportant une rainure 86, et un galet 88 présentant une forme adaptée pour coopérer avec la rainure 86.The drive means 36 further comprise a
La platine 84 est solidaire de la face arrière de la roue dentée 80.The
La rainure 86 comprend une première portion de guidage 90 excentrée par rapport à l'axe de rotation A-A de la roue 80, et une seconde portion de guidage 92 proche de l'axe de rotation de la roue 80.The
La première portion de guidage 90 présente un profil obtenu par épure pour que le bras de préhension 32 présente une trajectoire arquée tangente à la normale N2 au plan du fond 14 du culot. La seconde portion 92 présente un profil correspondant à un mouvement cycloïdal.The
La seconde portion de rainure 92 présente une longueur de 1/3 à 1/2 de la longueur totale de la rainure 86.The
Le galet 88, illustré sur les
La crémaillère 82 s'étend sur une longueur égale au périmètre de la roue dentée 80 à laquelle la longueur de la seconde portion 92 de la rainure est soustraite.The
Les moyens d'entraînement 36 comprennent en outre un arbre 94 dont une extrémité est fixée au centre de la roue dentée 80 parallèlement à l'axe de rotation A-A, et un support rotatif 96 solidaire de l'autre extrémité de l'arbre 94.The drive means 36 further comprise a
L'arbre 94 est apte à être entraîné en rotation par le chariot 74 lors du déplacement de celui-ci le long des rails de guidage 76 et 78. A cet effet, le chariot 74 comporte un palier 97 traversé par l'arbre 94.The
Le support rotatif 96 s'étend dans un plan parallèle au plan de la roue dentée 80. Il est propre à pivoter autour de l'axe de rotation A-A de la roue dentée 80.The
Les moyens d'entraînement 36 comportent enfin une bielle 98 dont une extrémité 100 est liée à une face avant 104 du support rotatif 96, une coulisse 104 liée à l'autre extrémité 106 de la bielle et une glissière 110 de guidage de la coulisse 104.The drive means 36 finally comprise a connecting
La glissière 110 est fixée à la face avant 45 de la plaque de support 38. Elle s'étend sur l'extension 44 selon la direction Z.The
La glissière 110 s'étend sur une longueur sensiblement égale au diamètre de la roue dentée 80, additionnée de la longueur de la bielle 98.The
L'extrémité 100 de la bielle est fixée au support rotatif 96 à une distance de l'axe de rotation A-A égale au rayon primitif objet de la roue dentée 80.The end 100 of the connecting rod is fixed to the
La bielle 98 est fixée sur une partie de sa longueur à un côté de l'entretoise 72 du bras de préhension 32 pour l'entraîner en déplacement.The connecting
La bielle 98 présente une longueur égale au périmètre de la roue dentée 80, additionnée de la longueur de la première portion de rainure 90, divisée par ![]()
![]()
Un ensemble de câblages d'alimentation et de commande présentant une forme générale en J (
Des rideaux 114 de protection contre la poussière sont montés dans des rails longitudinaux sur la face avant 45 du bâti.
La machine d'impression 2 comporte en outre une unité de pilotage 115 apte à commander les moyens d'entraînement 5 du plateau rotatif et le moteur 34 d'entraînement du bras de préhension 32.The printing machine 2 further comprises a control unit 115 able to control the drive means 5 of the turntable and the
L'unité de pilotage 115 est propre à gérer temporellement le déplacement du plateau rotatif 4 et l'actionnement du moteur 34 afin que le mouvement du bras de préhension 32 soit synchronisé au mouvement de rotation du plateau rotatif 4.The control unit 115 is able to temporally manage the displacement of the
A cet effet, l'unité de pilotage 115 est apte à commander le moteur 34 et les moyens d'entraînement 5 afin que le bras de préhension 32 arrive en fin de course de dépose de l'objet sur le dispositif de retenue et d'entraînement 6, lorsque le dispositif de retenue et d'entraînement 6 est localisé au droit de la plage de support 28.For this purpose, the control unit 115 is able to control the
L'unité de pilotage est également propre à commander le dispositif d'actionnement 68 des pinces de préhension 62, 64 pour commander l'ouverture et la fermeture de chaque paire de pinces 62, 64 à chaque fois que le bras de préhension 32 est en fin de course afin d'enserrer l'objet disposé sur la plage de support et libérer l'objet dans le dispositif de retenue et d'entraînement 6.The control unit is also able to control the
En fonctionnement, au cours d'une étape initiale, le plateau rotatif 4 est propre à pivoter autour de son axe de rotation pour disposer le dispositif de retenue et d'entraînement 6 porté par celui-ci en regard du convoyeur d'amenée 24. La bande transporteuse 28 se déplace pour amener la bouteille 8 à l'extrémité du convoyeur d'amenée 24.In operation, during an initial step, the
Les moyens d'entraînement du dispositif de transfert, tels que disposés au cours de l'étape initiale, sont représentés sur la
Au cours d'une étape de transfert, illustrée sur la
L'extrémité 100 de la bielle est entraînée selon un mouvement cycloïdal. L'extrémité 106 de la bielle est entraînée en déplacement selon un mouvement de translation verticale. Le bras de préhension 32 est entraîné en déplacement selon un mouvement complexe résultant de la combinaison des mouvements des extrémités 100 et 106 de la bielle réalisés simultanément. En particulier, la bouteille 8 est d'abord soulevée pour se dégager du convoyeur 24, puis la bouteille est pivotée pour amener son axe de révolution suivant la direction horizontale Y.The end 100 of the rod is driven in a cycloidal motion. The end 106 of the rod is driven in displacement in a vertical translational movement. The
Comme visible sur la
La trajectoire 116 du goulot 19 de la bouteille et la trajectoire 118 de sa base 17 se croisent comme visible sur les
Au cours d'une étape d'approche du culot, illustrée sur la
Au cours d'une étape de fin d'approche du culot, illustrée sur les
Spécifiquement, la trajectoire de la base 17 de l'objet présente une partie courbe ayant un point d'inflexion 120 dans sa partie 121 d'approche vers le culot 12, et comporte à la fois une composante selon la normale N1 à la plage de support 28 et une composante selon la normale N2 au fond 14 du culot. En fin de course de la partie 121 d'approche vers le culot 12, la trajectoire 118 de la base 17 présente une portion arquée 122 tangente à la normale N2, pour introduire la base 17 dans le culot.Specifically, the trajectory of the
Il est à noter que le plateau rotatif de la machine à imprimer peut être positionné à la même hauteur que la bande transporteuse du convoyeur ou à toute autre hauteur choisie, quelle que soit la longueur de l'objet à imprimer. Ceci est avantageux par rapport à l'agencement connu, mentionné plus haut, dans lequel le dispositif de transfert comprend un bras de levage basculant, dont la longueur est fonction de la longueur de l'objet à imprimer. En effet, dans un tel agencement, le plateau rotatif porteur des dispositifs de retenue et d'entraînement des objets est positionné à une hauteur élevée, ce qui nécessite un châssis de poids élevé et rend difficile les opérations de maintenance sur les postes d'impression disposés au-dessus du plateau rotatif.It should be noted that the rotary plate of the printing machine can be positioned at the same height as the conveyor belt of the conveyor or at any other height chosen, regardless of the length of the object to be printed. This is advantageous with respect to the known arrangement, mentioned above, wherein the transfer device comprises a tilting lifting arm, whose length is a function of the length of the object to be printed. Indeed, in such an arrangement, the rotating plate carrying the devices for retaining and driving objects is positioned at a distance of high height, which requires a high weight frame and makes maintenance operations difficult on the printing stations arranged above the turntable.
Claims (14)
- Process of moving an object (8) between a support zone (28) and a cap (12) of a printing machine (2), the object (8) comprising a base (17) and an opening (19), the cap (12) comprising a bottom (14) which extends in a plane (X-2) perpendicular to the support zone (28) and a peripheral rim (16) having a shape complementary to the shape of the base (17) of the object, the printing machine comprising:- a frame (30);- at least one holding arm (32) which is carried by the frame (30), the holding arm (32) being able to carry the object (8) to be moved; and- drive means (36) which are carried by the frame (30);characterised in that during one step of the process the drive means (36) move the holding arm (32) so that the opening of the object is moved firstly along an initial trajectory portion which comprises a component, in a direction perpendicular to the support zone (28), which is oriented in the opposite direction to the support zone, then along a curve which extends through a point (119) of the trajectory (118) of the base (17) of the object, after the base (17) of the object has passed through that point.
- Process according to claim 1, characterised in that the trajectory (118) of the base (17) of the object and the trajectory (116) of the opening of the object are arranged on a plane containing a normal (N1) to the support zone (28) and a normal (N2) to the bottom (14) of the cap.
- Process according to claim 1 or 2, characterised in that the drive means (36) move the base (17) of the object at the end of travel towards the cap, in accordance with at least one arced trajectory portion (116, 118) which is tangential to a normal (N2) relative to the bottom (14) of the cap (12), in order to introduce the base (17) of the object into the cap (12).
- Process according to any of claims 1 to 3, characterised in that the trajectory (118) of the base (17) of the object has a curved portion having an inflection point (20) in its portion for approaching the cap (12).
- Process according to any of the preceding claims, characterised in that the drive means (36) lift up the object (8), then make it rotate around an axis of rotation having a first direction (X), from a position in which the axis of revolution of the object (8) is arranged according to a second direction (Z) normal to the support zone (28) to a position in which the axis of revolution of the object (8) is arranged according to a third direction (Y) normal to the bottom (14) of the cap (12), the first direction (X) being perpendicular to the second (2) and to the third (Y) directions, the bottom of the cap being parallel to the plane defined by the first and the second directions.
- Process according to any of the preceding claims, characterised in that the drive means (396) comprise a connecting rod (98) which is fixedly joined to the holding arm (32), the connecting rod comprising a first end (100) and a second end (106), the first end being guided in a movement direction which extends substantially in accordance with the normal (N2) relative to the support zone (28), the second end (106) being moved in accordance with a cycloidal movement in order to raise then pivot the object (8), during the transfer of the object from the support zone (28) towards the cap (12).
- Printing machine (2) able to implement the process according to any of claims 1 to 6, said printing machine comprising:- a chassis; and- a support zone (28),the printing machine (2) being characterised in that it further comprises:- a plate (4) which rotates about a vertical axis of rotation and which is carried by the chassis;- at least one device (6) for retaining and driving the object (8) to be printed that is carried by the rotating plate (4); and- at least one printing station which is carried by the chassis in alignment with the rotating plate (4);and in that it further comprises a transfer device according to claim 1, which is able to take the object to be printed from a support zone and to position it inside the cap of the device for retaining and driving the object.
- Printing machine (2) according to claim 7, characterised in that the drive means (36) comprise:- a toothed wheel (80), the first end of the connecting rod being connected to the toothed wheel at a point thereof located at a distance from the axis of rotation (A-A') of the toothed wheel (80) that is equal to the primitive radius thereof;- a rack (82) which is fixed to the frame (30); and- propulsion means (34) which are able to drive the toothed wheel (80) along the rack (82).
- Printing machine (2) according to claim 6, characterised in that the drive means (36) comprise:- a first guide means (86, 90, 92)which is connected to the first end of the connecting rod (100);- propulsion means (34) which are able to drive the first guide means in rotation; and- a second guide means (88) which is fixedly joined to the frame and which is able to cooperate with the first guide means, the first guide means being shaped in order to impose on the holding arm a trajectory corresponding to the approach travel towards the cap and allowing the object to be introduced into the cap at the end of approach travel towards the cap.
- Printing machine (2) according to claim 9, characterised in that the first guide means (86, 90, 92) comprises a channel (86) having a first channel portion (90) which is shaped in order to impose on the first end of the connecting rod the movement for introducing the object into the cap and a second channel portion (92) which is shaped in order to impose the cycloidal movement on the first end of the connecting rod.
- Printing machine (2) according to claims 8 and 9 together, characterised in that the first guide means (86, 90, 92) is fixedly joined to the toothed wheel (80) so that the same propulsion means are able to drive the toothed wheel in terms of rotation and the first guide means during the transfer of the object and at the end of approach travel towards the cap.
- Printing machine (2) according to claims 7, 8 and 10, characterised in that the connecting rod (98) extends over a length equal to the length of the perimeter of the toothed wheel multiplied by

- Printing machine according to claim 7 together with any of claims 8 to 12, characterised in that
the printing machine (115) comprises means (5) for driving the rotating plate in rotation and a control unit (115), the control unit being able to control the means for driving the rotating plate (4) and the propulsion means (34) in such a manner that the holding arm (32) is in a travel end position when the or each retention and drive device (6) is located in alignment with the support zone (28) in order to arrange the object in the retention and drive device. - Printing machine according to claim 13, characterised in that the holding arm (32) comprises at least one pair of holding clips (62, 64) which is able to grip and release the object (8), and a device (68) for actuating the or each pair of clips (62, 64), and the control unit (115) is able to further control the actuation device (68) in order to actuate the or each pair of holding clips (62, 64) when the holding arm is in a travel end position.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PL07291126T PL1908590T3 (en) | 2006-09-26 | 2007-09-21 | Object transport method and printing machine |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| FR0608431A FR2906179B1 (en) | 2006-09-26 | 2006-09-26 | TRANSFER DEVICE AND PRINTING MACHINE. |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| EP1908590A2 EP1908590A2 (en) | 2008-04-09 |
| EP1908590A3 EP1908590A3 (en) | 2008-05-28 |
| EP1908590B1 true EP1908590B1 (en) | 2013-07-03 |
Family
ID=38353917
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP07291126.6A Not-in-force EP1908590B1 (en) | 2006-09-26 | 2007-09-21 | Object transport method and printing machine |
Country Status (7)
| Country | Link |
|---|---|
| US (1) | US7845273B2 (en) |
| EP (1) | EP1908590B1 (en) |
| BR (1) | BRPI0704905A (en) |
| ES (1) | ES2427569T3 (en) |
| FR (1) | FR2906179B1 (en) |
| PL (1) | PL1908590T3 (en) |
| RU (1) | RU2440896C2 (en) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN109720868A (en) * | 2019-02-26 | 2019-05-07 | 广州市鑫徕升机械设备有限公司 | A kind of full-automatic special screen printing press tool |
Families Citing this family (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| FR2943634B1 (en) * | 2009-03-24 | 2011-04-22 | Cer | MACHINE AND METHOD FOR MARKING OR LABELING |
| FR3001648B1 (en) * | 2013-02-04 | 2015-07-17 | Illinois Tool Works | MACHINE AND METHOD FOR MARKING ARTICLES |
| CN107867047A (en) * | 2017-11-29 | 2018-04-03 | 深圳市天慧谷科技股份公司 | Full-automatic screen printer |
| CN109131993B (en) * | 2018-10-26 | 2024-06-07 | 赵欣欣 | Medicine bottle transportation transfer device and automatic production equipment thereof |
| CN109532215B (en) * | 2018-12-20 | 2021-07-13 | 许振松 | Multifunctional screen printing machine |
| CN109466929B (en) * | 2018-12-30 | 2023-12-26 | 无锡华氏恒辉精密装备科技有限公司 | AOI detects unloader |
| CN112319020A (en) * | 2020-08-25 | 2021-02-05 | 云月(广州)科技有限公司 | Full-automatic intelligent silk screen printing machine |
| CN113306280B (en) * | 2021-04-15 | 2023-01-10 | 青岛海佰利机械有限公司 | Full-automatic printing process |
Family Cites Families (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5249663A (en) * | 1991-10-04 | 1993-10-05 | Carl Strutz And Company, Inc. | Apparatus to load workpieces |
| US5333720A (en) * | 1992-05-14 | 1994-08-02 | Carl Strutz & Co., Inc. | Apparatus to manipulate workpieces |
| DE4431596C1 (en) * | 1994-09-05 | 1995-10-19 | Balsfulland Maschfabrik Gmbh | Printing system for items |
| FR2775471B1 (en) * | 1998-02-27 | 2000-05-19 | Dubuit Mach | LOADING AND / OR UNLOADING DEVICE WITH TIPPING TRANSFER, IN PARTICULAR FOR A PRINTING MACHINE |
-
2006
- 2006-09-26 FR FR0608431A patent/FR2906179B1/en not_active Expired - Fee Related
-
2007
- 2007-09-21 PL PL07291126T patent/PL1908590T3/en unknown
- 2007-09-21 ES ES07291126T patent/ES2427569T3/en active Active
- 2007-09-21 EP EP07291126.6A patent/EP1908590B1/en not_active Not-in-force
- 2007-09-25 RU RU2007135623/11A patent/RU2440896C2/en not_active IP Right Cessation
- 2007-09-25 BR BRPI0704905-6A patent/BRPI0704905A/en not_active Application Discontinuation
- 2007-09-26 US US11/902,835 patent/US7845273B2/en not_active Expired - Fee Related
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN109720868A (en) * | 2019-02-26 | 2019-05-07 | 广州市鑫徕升机械设备有限公司 | A kind of full-automatic special screen printing press tool |
Also Published As
| Publication number | Publication date |
|---|---|
| BRPI0704905A (en) | 2008-05-13 |
| EP1908590A3 (en) | 2008-05-28 |
| US20080245244A1 (en) | 2008-10-09 |
| EP1908590A2 (en) | 2008-04-09 |
| FR2906179B1 (en) | 2009-06-05 |
| RU2007135623A (en) | 2009-03-27 |
| PL1908590T3 (en) | 2013-11-29 |
| RU2440896C2 (en) | 2012-01-27 |
| ES2427569T3 (en) | 2013-10-31 |
| FR2906179A1 (en) | 2008-03-28 |
| US7845273B2 (en) | 2010-12-07 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP1908590B1 (en) | Object transport method and printing machine | |
| EP0069661B1 (en) | Automatic sheet folding machine | |
| FR2652529A1 (en) | ROBOT. | |
| CA2004409C (en) | Cartoning machine used to automatically put an item, especially a vial, in a case | |
| FR2683515A1 (en) | Apparatus for gripping and transporting stacks of flat objects | |
| FR2675482A1 (en) | HANDLING DEVICE FOR CONVEYING PANELS, IN PARTICULAR SIDE PANELS COMPRISING THE BODY OF A VEHICLE. | |
| EP1518675B1 (en) | Printing press | |
| EP0445044B1 (en) | Bending machine with two bending heads | |
| EP1775126B1 (en) | Article transfer device for a printing machine, printing machine and transfer process | |
| EP0286514B1 (en) | Conveyer comprising platforms specially enabling the transport of buckets | |
| EP2051918A1 (en) | Container inverting device | |
| EP0424290B1 (en) | Positioning device for a product in the form of a flexible sheet | |
| EP0320376A1 (en) | Arrangement for applying tubular labels to objects such as cans | |
| FR2463003A1 (en) | IMPROVEMENTS IN THE SERIGRAPHIC MACHINES CONCERNING THE OBJECT-HOLDER MOUNT AND ITS RELATIVE MOTION IN RELATION TO THE SCREEN | |
| FR1465524A (en) | Apparatus for handling newly shaped articles of glass or the like | |
| FR2644778A1 (en) | POSITIONING OF A RUNNING GLASS SHEET ON A CONVEYOR | |
| FR2573006A1 (en) | PRINTING MACHINE | |
| FR2489802A1 (en) | Automatic bottle-rinsing feed - has holding jaws on drum inverted and opened by guide track and cams | |
| FR2602119A1 (en) | Automatic machine for loading and unloading trays of shelf frames in the treatment of meats in general | |
| EP0390658A1 (en) | Method for transporting pieces to one or more processing stations and removing them | |
| FR2525147A1 (en) | APPARATUS FOR LOADING AND DISCHARGING INDUSTRIAL PRESSES | |
| FR2505238A1 (en) | MEANS FOR TRANSFERRING PARTS OF THE DUAL-ARM ROBOT TYPE | |
| EP1543965A1 (en) | Silk screen printing machine with a device for transferring the objects to be printed | |
| EP1867480B1 (en) | Printing machine | |
| FR2795012A1 (en) | DEVICE FOR TRANSFERRING WORKPIECES |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| AK | Designated contracting states |
Kind code of ref document: A2 Designated state(s): AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HU IE IS IT LI LT LU LV MC MT NL PL PT RO SE SI SK TR |
|
| AX | Request for extension of the european patent |
Extension state: AL BA HR MK RS |
|
| PUAL | Search report despatched |
Free format text: ORIGINAL CODE: 0009013 |
|
| AK | Designated contracting states |
Kind code of ref document: A3 Designated state(s): AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HU IE IS IT LI LT LU LV MC MT NL PL PT RO SE SI SK TR |
|
| AX | Request for extension of the european patent |
Extension state: AL BA HR MK RS |
|
| 17P | Request for examination filed |
Effective date: 20081105 |
|
| AKX | Designation fees paid |
Designated state(s): DE ES GB IT PL |
|
| 17Q | First examination report despatched |
Effective date: 20090113 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R079 Ref document number: 602007031370 Country of ref document: DE Free format text: PREVIOUS MAIN CLASS: B41F0017000000 Ipc: B41F0015080000 |
|
| GRAP | Despatch of communication of intention to grant a patent |
Free format text: ORIGINAL CODE: EPIDOSNIGR1 |
|
| RIC1 | Information provided on ipc code assigned before grant |
Ipc: B41F 17/00 20060101ALI20120906BHEP Ipc: B41F 15/08 20060101AFI20120906BHEP Ipc: B65G 47/90 20060101ALI20120906BHEP Ipc: B65G 47/91 20060101ALI20120906BHEP |
|
| GRAP | Despatch of communication of intention to grant a patent |
Free format text: ORIGINAL CODE: EPIDOSNIGR1 |
|
| GRAS | Grant fee paid |
Free format text: ORIGINAL CODE: EPIDOSNIGR3 |
|
| GRAA | (expected) grant |
Free format text: ORIGINAL CODE: 0009210 |
|
| AK | Designated contracting states |
Kind code of ref document: B1 Designated state(s): DE ES GB IT PL |
|
| REG | Reference to a national code |
Ref country code: GB Ref legal event code: FG4D Free format text: NOT ENGLISH |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R096 Ref document number: 602007031370 Country of ref document: DE Effective date: 20130829 |
|
| REG | Reference to a national code |
Ref country code: ES Ref legal event code: FG2A Ref document number: 2427569 Country of ref document: ES Kind code of ref document: T3 Effective date: 20131031 |
|
| REG | Reference to a national code |
Ref country code: PL Ref legal event code: T3 |
|
| PLBE | No opposition filed within time limit |
Free format text: ORIGINAL CODE: 0009261 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: NO OPPOSITION FILED WITHIN TIME LIMIT |
|
| 26N | No opposition filed |
Effective date: 20140404 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R097 Ref document number: 602007031370 Country of ref document: DE Effective date: 20140404 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: ES Payment date: 20150928 Year of fee payment: 9 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: CH Payment date: 20170828 Year of fee payment: 11 Ref country code: GB Payment date: 20170914 Year of fee payment: 11 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: ES Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20160922 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: IT Payment date: 20180911 Year of fee payment: 12 |
|
| REG | Reference to a national code |
Ref country code: ES Ref legal event code: FD2A Effective date: 20181126 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: PL Payment date: 20180817 Year of fee payment: 12 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R119 Ref document number: 602007031370 Country of ref document: DE |
|
| GBPC | Gb: european patent ceased through non-payment of renewal fee |
Effective date: 20180921 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: DE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20190402 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: GB Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20180921 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IT Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20190921 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: PL Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20190921 |