EP0812059B1 - Procédé de contrôle commande d'une machine tournante, dispositif d'asservissement pour mettre en oeuvre ledit procédé et application du dispositif à une machine tournante - Google Patents
Procédé de contrôle commande d'une machine tournante, dispositif d'asservissement pour mettre en oeuvre ledit procédé et application du dispositif à une machine tournante Download PDFInfo
- Publication number
- EP0812059B1 EP0812059B1 EP97401181A EP97401181A EP0812059B1 EP 0812059 B1 EP0812059 B1 EP 0812059B1 EP 97401181 A EP97401181 A EP 97401181A EP 97401181 A EP97401181 A EP 97401181A EP 0812059 B1 EP0812059 B1 EP 0812059B1
- Authority
- EP
- European Patent Office
- Prior art keywords
- computer
- vector
- stator
- phase voltage
- state
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Lifetime
Links
Images







Classifications
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P23/00—Arrangements or methods for the control of AC motors characterised by a control method other than vector control
- H02P23/30—Direct torque control [DTC] or field acceleration method [FAM]
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P21/00—Arrangements or methods for the control of electric machines by vector control, e.g. by control of field orientation
- H02P21/24—Vector control not involving the use of rotor position or rotor speed sensors
- H02P21/28—Stator flux based control
- H02P21/30—Direct torque control [DTC] or field acceleration method [FAM]
Definitions
- the invention relates to a process for controlling and controlling a machine. rotating, a servo device intended to implement said method, and a rotating machine provided with such a device. More specifically the present invention relates to a torque control process and a stator flow of a machine rotating.
- This method involves vector modeling of the machine and the voltage inverter.
- the electromagnetic torque is a function of the angle existing between the rotating rotor flux vector and the stator flux rotating vector and the modules of these flux vectors.
- the stator voltage vector V s is delivered by a three-phase voltage inverter each phase comprising a two-state switch (SP2LL): Single Pole 2 Logic Levels / single pole with 2 logic levels). Therefore, the stator voltage vector V s can take 8 states V 1 ... V 8 (2 3 ), including two V 1 , V 8 of zero amplitude (zero states) in the fixed stator frame ( ⁇ , ⁇ ), depending on the combination of the three SP2LLs of the inverter.
- SP2LL two-state switch
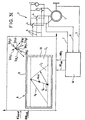
- Fig. 1 a system called DTC (Direct Torque Control) based, in the stator frame ( ⁇ , ⁇ ), on the maintenance of the module
- DTC Direct Torque Control
- the control of the stator flux vector ⁇ S is ensured by means of a finite table.
- the finished table below and figure 1 illustrates this method.
- ⁇ S is in the area N 6 and its end follows the state V 2 of the stator phase voltage vector V s .
- the state V 2 is a state which makes grow
- the process will switch to V 3 as soon as
- the device stops the rotation of the stator flow (zero state) and the rotor flow catches up with the stator flow thereby reducing the angle and therefore the torque.
- the flow rotor also rotates at low speed, which significantly affects the torque response dynamics.
- One of the aims of the present invention is to propose a method where, the control quantities also being the electromagnetic torque and the stator flux, whatever the situation of the rotating machine at a given time, the state of the optimal stator phase voltage vector V s , among all possible states, to best respond to the desired control strategy.
- the invention relates to a method of regulating a rotating machine with n phases supplied with alternating current via a voltage inverter, comprising n SPmLL defining m "states V i (i ⁇ ⁇ 1, .., m n ) of the stator phase voltage vector V s , said machine being controlled by an electromagnetic couple T em and by a stator flux ⁇ s to an electromagnetic couple T emref and by a stator flux ⁇ sref by a control system comprising a set of sensors whose sensed values are transmitted to an observer, the outputs of the observer being injected into a computer, said computer outputting control signals intended to control the SPmLLs of the voltage inverter.
- n and / or m have high values this generates many possible states.
- the invention then has for other advantage that when one of the SPmLL is accidentally locked in a position that is not optimal for a given configuration, the process will continue to choose the state the best possible among the remaining possible states for get closer to the instructions. The dynamic performance of control are affected, but the risk of discrepancies or peak torque are minimized.
- the computer in the process initialization step we construct, in the computer, a cyclic path of circulation from point A around point A ref in the plan element, an average switching frequency for the inverter is entered in the computer, the computer divides the plane element into switching zones Z i adapted to the cyclic path, the computer builds a switching table in which for each zone Z i it matches the future optimal state V f of the stator phase voltage vector V S as a function of the current states V a and past V p of the stator phase voltage vector V S to follow the cyclic circulation path in said zone Z i ; and in that, under steady state, and at each sampling, the computer calculates the sizes of the switching zones Z i as a function of the instantaneous configuration of the machine, so as to respect the chosen average cutting frequency, the computer chooses as control vector C the optimal future state V f of the stator phase voltage vector V s , from the switching table, as a function of the zone Z i where point A is located, and of the current states V a and
- Control of the average switching frequency of the inverter is an advantage to limit significantly the switching losses in SPmLL and therefore extend their lifespan.
- the invention also relates to a servo system implementing the method described above.
- the invention finally relates to a rotating machine including such a servo system.
- Figure 1 is a schematic representation in the fixed stator plan of the method of the prior art.
- Figure 2 is a schematic representation of the method according to the invention for a transient regime.
- Figures 3 to 3E are representations schematics of the method according to the invention for a diet established, from a given example cycle.
- the invention relates to a method for regulating a rotary machine 1 to n Phases supplied with alternating current by means of a voltage inverter 3 comprising n switches with m positions 4 (hereinafter SPmLL: Single Pole m Logic Levels / single pole at m logic levels) defining m n states V i (i ⁇ ⁇ 1, .., m n ⁇ ) of the stator phase voltage vector V S , said machine 1 being slaved to an electromagnetic couple T emref and to a stator flow ⁇ Setpoint ref.
- SPmLL Single Pole m Logic Levels / single pole at m logic levels
- the control system of the machine comprises a set of sensors whose sensed values 7, 8, 9 are transmitted to an observer 10.
- the outputs of the observer 10 are values representative of the electromechanical couple T em and of the stator flux ⁇ S of the rotating machine. There are many more or less sophisticated sensors and observers 10.
- the values representative of the electromagnetic torque T em and of the stator flux ⁇ S are injected into the computer 13 implementing the method according to the invention.
- This computer 13 also receives as inputs the values representative of the setpoints T emref , ⁇ Sref of the electromechanical torque and the stator flux.
- the computer 13 outputs control signals 6 intended to control the SPmLLs 4 of the voltage inverter 3.
- the invention relates more precisely to the steps of process taking place in the computer 13.
- an output plane P is constructed in the computer 13, one of the axes of which is representative of the electromagnetic torque and the other x axis is representative of the stator flux, it defines a point a ref representing instructions torque and stator flux in said plane and a point a representing the instantaneous configuration of the machine, is defined around the point a ref part of plane 5 ⁇ ⁇ x, ⁇ ⁇ y inside which one is in steady state, and outside which one is in transient state. Therefore plan P is divided into two parts, each representing one of the plans.
- the method chooses from the set of possible states V i (i ⁇ ⁇ 1, .., m n ⁇ ) of the stator phase voltage vector V s that which offers the greatest speed of variation from point A in a direction close to the ideal direction (AA ref ) of approach.
- a state model of the rotating machine is introduced into the computer 13 in which the output vector S is a vector of the output plane P and the control vector C is the vector phase voltage V s ; and under transient conditions, at each sampling, the computer 13 calculates the vector (AA ref ), the computer 13 calculates the directional derivative S ⁇ of the output vector S for each of the possible states V i of the phase voltage vector V s , the computer 13 calculates the scalar product of each of the directional derivatives S ⁇ (V i ) of the output vector S with the vector (AA ref ), the computer chooses as control vector C the state V i of the phase voltage vector V s associated with the largest of the scalar products calculated.
- FIG. 2 represents the operation of the process in transient regime.
- the dotted line 15 represents the ideal path for A to join A ref as quickly as possible.
- the vector (AA ref ) is recalculated as well as the optimal state. This can result, for example, in a trajectory as represented by curve 14.
- n and / or m many states other advantage than when one of the SPmLL is accidentally stuck in a position that is not optimal for a given configuration, the process will continue to choose the best possible state among possible remaining states to get closer to the instructions. Dynamic control performance is affected, but the risks of divergences or peak of torque are deleted.
- a cyclic path 15 of circulation from point A around point A ref in the plane element 5 is constructed in the computer 13, an average switching frequency is entered into the computer for the inverter 3, the computer divides the plane element 5 into switching zones Z i adapted to the cyclic path 15, the computer builds a switching table in which for each zone Z i it matches the future optimal state V f of the stator phase voltage vector V s as a function of the current states V a and past V p of the stator phase voltage vector V s to follow the cyclic path 15 of circulation in said zone Z i ; and in that, under steady state, and at each sampling, the computer 13 calculates the sizes of the switching zones Z i as a function of the instantaneous configuration of the machine, so as to respect the chosen average cutting frequency the computer chooses as control vector C the optimal future state V f of the stator phase voltage vector V s , from the switching table, as a function of the zone Z i where
- Figure 3 shows the cycle 15 chosen.
- Figures 3A to 3E as well as the table above shows an example of circulation of point A according to the cycle 15 chosen.
- the positioning and dimensioning of the zones Z i have an influence on the average switching frequency of the inverter and vice versa.
- the average frequency of switching of the inverter is taken into account during the construction of the zones Z i .
- Control of the average switching frequency of the inverter is an advantage to limit significantly the risks of deterioration of SPmLL and extend their service life.
- point A is either in zone Z 2 or in zone Z 4 , the current state is V 3 , the past state is V 2 .
- Point A may, in the future, pass into zone Z 5 , Z 1 , or Z 3 .
- the future state will remain the current state V 3 , if point A passes through one of the zones Z 5 , Z 1 , or Z 3 , the future state is V 1 .
- FIGS 3B to 3E can be explained in the same way way using the switching table.
- the y-axis directly represents the electromagnetic torque
- the x-axis represents the square of the stator flux.
- the points of the plane P have the coordinates: ( ⁇ S 2 / ⁇ o 2 , ( ⁇ -1) T em / T o ) where ⁇ is a weighting coefficient whose value is set by the user of the rotating machine. This weighting coefficient makes it possible to give a more or less significant weight to one of the outputs compared to the other.
- the invention also relates to a servo system implementing the method described above.
- the invention finally relates to a rotating machine including such a servo system.
Landscapes
- Engineering & Computer Science (AREA)
- Power Engineering (AREA)
- Control Of Ac Motors In General (AREA)
- Control Of Electric Motors In General (AREA)
- Extrusion Moulding Of Plastics Or The Like (AREA)
- Control Of Multiple Motors (AREA)
- Turning (AREA)
- Threshing Machine Elements (AREA)
- Coating Apparatus (AREA)
- Control Of Velocity Or Acceleration (AREA)
- Control Of Eletrric Generators (AREA)
- Selective Calling Equipment (AREA)
Description

- La table finie n'est pas exhaustive des situations dynamiques possibles de la machine tournante. Concevoir une table en vu d'une prise en compte exhaustive des situations de la machine est inconcevable (dans le cas simple d'un onduleur à trois SP2LL on obtient déjà six domaines dans chacun desquels 4 états peuvent être utilisés). En outre, un défaut de fonctionnement de l'un des SP2LL supprime trois des états possibles du vecteur de phase statorique Vs ce qui réduit sensiblement la table finie de commande et peut amener la machine tournante dans une situation incontrôlable (pointe de couple).
- La technique proposée dédie le contrôle du flux statorique S (maintien du module du flux statorique dans la bande d'hystérésis H) au Contrôle du couple Tem. Les configurations dans lesquelles on souhaite un contrôle du Flux statorique S concomitant au contrôle du couple Tem ne sont pas prévues.
- Dans le cas d'un échelon de couple négatif (réduction du couple en échelon) à faible vitesse de rotation du rotor, la dynamique de réponse de la solution ci-dessus est très mauvaise. Notamment, le temps de réponse à de l'échelon négatif est de l'ordre de quatre fois le temps de réponse d'un échelon positif de même amplitude.
- La stratégie de commutation de l'onduleur de tension est la même que l'on soit en régime transitoire (les valeurs instantanées du flux et du couple sont éloignées des valeurs de consigne) ou en régime établi (les valeurs instantanées du flux et du couple oscillent autour des valeurs de consigne). De ce fait la fréquence moyenne de découpage de l'onduleur de tension, en régime établi, n'est pas contrôlable et chaotique. Pour des tensions et des courants maximaux élevés cela peut amener rapidement à une détérioration irréversible de certains SP2LL et donc, pour les raisons précédemment cités, amener la machine tournante dans une situation incontrôlable.
et dans une étape d'initialisation du procédé on construit dans le calculateur un plan virtuel de sortie P dont l'un des axes est représentatif du couple électromagnétique et l'autre axe est représentatif du flux stator, les consignes de couple et de flux statorique étant représentées par un point Aref et le couple et le flux statorique instantanés par un point A, un élément de plan (±Δ x , ±Δy) étant défini autour du point Aref,
et le calculateur utilise la stratégie de contrôle en régime établi lorsque le point A est à l'intérieur de l'élément de plan et la stratégie de contrôle en régime transitoire lorsque le point A est à l'extérieur de l'élément de plan, cette stratégie de contrôle en régime transitoire comprenant les étapes suivantes :
- on introduit dans le calculateur un modèle d'état de la machine tournante dans lequel le vecteur de sortie S est un vecteur du plan de sortie P et le vecteur de commande C est le vecteur de tension de phase Vs; et
- en régime transitoire, à chaque échantillonnage, le calculateur calcule le vecteur (A- Aref ), le calculateur calcule la dérivée directionnelle S ˙ du vecteur de S pour chacun des états Vi possibles du vecteur tension de phase Vs,
- le calculateur calcule le produit scalaire de chacune des dérivées directionnelles S ˙ (V1) du vecteur de sortie S avec le vecteur (A- Aref),
- le calculateur choisit comme vecteur de commande C l'état Vi du vecteur tension de phase Vs associé au plus grand des produits scalaires calculés.
on construit, dans le calculateur un chemin cyclique de circulation du point A autour du point Aref dans l'élément de plan,
on rentre dans le calculateur une fréquence moyenne de découpage pour l'onduleur,
le calculateur divise l'élément de plan en zones Zi de commutation adaptées au chemin cyclique,
le calculateur construit une table de commutation dans laquelle pour chaque zone Zi il fait correspondre l'état Vf optimal futur du vecteur tension de phase stator VS en fonction des états actuel Va et passé Vp du vecteur tension de phase stator VS pour suivre le chemin cyclique de circulation dans ladite zone Zi; et en ce que,
en régime établi, et à chaque échantillonnage,
le calculateur calcule les tailles des zones Zi de commutation en fonction de la configuration instantanée de la machine, de manière à respecter la fréquence moyenne de découpage choisie,
le calculateur choisit comme vecteur de commande C l'état Vf optimal futur du vecteur tension de phase stator Vs, à partir de la table de commutation, en fonction de la zone Zi où se trouve le point A, et des états actuel Va et passé Vp du vecteur tension de phase stator Vs.
la dérivée directionnelle S du vecteur de sortie S est :
- du régime transitoire dans lequel le couple électromagnétique Tem et/ou le flux statorique S sont éloignés respectivement du couple électromagnétique Temref et/ou du flux statorique Sref de consigne, et
- du régime établi dans lequel le couple Tem et le flux statorique S sont compris respectivement dans un intervalle ±ΔTem autour de Temref et dans un intervalle ±ΔS autour de Sref.
pour minimiser les amplitudes des oscillations du couple Tem et le flux statorique S autour respectivement du couple Temref et du flux statorique Sref de consigne, et/ ou
pour respecter un gabarit fréquenciel pour le couple Tem
on commande la commutation des SPmLL correspondant à l'état choisi Vi du vecteur tension de phase Vs.
en régime transitoire, à chaque échantillonnage,
le calculateur 13 calcule le vecteur (A-Aref),
le calculateur 13 calcule la dérivée directionnelle S ˙ du vecteur de sortie S pour chacun des états Vi possibles du vecteur tension de phase Vs,
le calculateur 13 calcule le produit scalaire de chacune des dérivées directionnelles S ˙(Vi) du vecteur de sortie S avec le vecteur (A-Aref),
le calculateur choisit comme vecteur de commande C l'état Vi du vecteur tension de phase Vs associé au plus grand des produits scalaires calculés.
on rentre dans le calculateur une fréquence moyenne de découpage pour l'onduleur 3,
le calculateur divise l'élément de plan 5 en zones Zi de commutation adaptées au chemin cyclique 15,
le calculateur construit une table de commutation dans laquelle pour chaque zone Zi il fait correspondre l'état Vf optimal futur du vecteur tension de phase stator Vs en fonction des états actuel Va et passé Vp du vecteur tension de phase stator Vs pour suivre le chemin cyclique 15 de circulation dans ladite zone Zi; et en ce que,
en régime établi, et à chaque échantillonnage,
le calculateur 13 calcule les tailles des zones Zi de commutation en fonction de la configuration instantanée de la machine, de manière à respecter la fréquence moyenne de découpage choisie
le calculateur choisit comme vecteur de commande C l'état Vf optimal futur du vecteur tension de phase stator Vs, à partir de la table de commutation, en fonction de la zone Zi où se trouve le point A, et des états actuel Va et passé Vp du vecteur tension de phase stator Vs. L'état passé Vp du vecteur tension de phase stator Vs doit être compris comme étant l'état de la commutation précédente.
| ZONE Zi | Vp | Va | Vf |
| Z1 | V2 | V3 | V1 |
| ∀Vi | V2 | V2 | |
| ∀Vi≠V2 | V3 | V3 | |
| ∀Vi | Vi={V1,V5,V7} | V1 | |
| ∀Vi | Vi={V4,V6,V8} | V8 | |
| Z2 | V3 | V2 | V8 |
| ∀Vi≠V3 | V2 | V2 | |
| ∀Vi | V3 | V3 | |
| ∀Vi | Vi={V1,V5,V7} | V1 | |
| ∀Vi | Vi={V4,V6,V8} | V8 | |
| Z3 | V2 | V3 | V1 |
| ∀Vi | V2 | V2 | |
| ∀Vi≠V2 | V3 | V2 | |
| ∀Vi | Vi={V1,V5,V7} | V8 | |
| ∀Vi | Vi={V4,V6,V8} | V1 | |
| Z4 | V3 | V2 | V8 |
| ∀Vi≠V3 | V2 | V3 | |
| ∀Vi | V3 | V3 | |
| ∀Vi | Vi={V1,V5,V7} | V1 | |
| ∀Vi | Vi={V4,V6,V8} | V8 | |
| Z5 | ∀Vi | Vi={V1, V3, V5, V7} | V1 |
| ∀V1 | Vi={V2, V4, V6, V8) | V8 | |
| Z6 | ∀Vi | Vi={V1, V3, V5, V7} | V1 |
| ∀Vi | Vi={V2, V4, V6, V8} | V8 | |
| Table de commutation en régime établi |
Claims (7)
- Procédé de régulation d'une machine tournante (1) à n Phases alimentée en courant alternatif par l'intermédiaire d'un onduleur de tension (3), comprenant n SPmLL (4) définissant mn états Vi (i∈ {1,..,mn) du vecteur tension de phase stator Vs, ladite machine étant asservie en couple électromagnétique Tem et en flux statorique s à un couple électromagnétique Temref et à un flux statorique sref par un système d'asservissement comprenant un ensemble de capteurs dont les valeurs captées (7, 8, 9,) sont transmises à un observateur (10), les sorties de l'observateur (10) étant injectées dans un calculateur (13), ledit calculateur (13) restituant en sortie des signaux de commandes (6) destinés à commander les SPmLL (4) de l'onduleur de tension (3),
tel que, dans une stratégie de contrôle pour un régime transitoire dans lequel le couple électromagnétique Tem et/ou le flux statorique s sont éloignés respectivement du couple électromagnétique Temref et/ou du flux statorique sref de consigne, le calculateur (13) choisit parmi tous les états Vi possibles du vecteur tension de phase stator Vs celui qui est optimal pour amener le couple Tem et le flux statorique s vers le couple Temref et le flux statorique sref de consigne et restitue des signaux de commandes (6) pour commander les SPmLL (4) selon l'état choisi du vecteur tension de phase Vs,
et caractérisé en ce que dans une étape d'initialisation du procédé on construit dans le calculateur (13) un plan virtuel de sortie P dont l'un (y) des axes est représentatif du couple électromagnétique et l'autre axe (x) est représentatif du flux stator, les consignes de couple et de flux statorique étant représentées par un point Aref et le couple et le flux statorique instantanés par un point A, un élément de plan (5) (±Δ x, ±Δ y) étant défini autour du point Aref,
et le calculateur (13) utilise la stratégie de contrôle en régime établi lorsque le point A est à l'intérieur de l'élément de plan (5) et la stratégie de contrôle en régime transitoire
lorsque le point A est à l'extérieur de l'élément de plan (5), cette stratégie de contrôle en régime transitoire comprenant les étapes suivantes :on introduit dans le calculateur (13) un modèle d'état de la machine tournante dans lequel le vecteur de sortie S est un vecteur du plan de sortie P et le vecteur de commande C est le vecteur de tension de phase Vs; eten régime transitoire, à chaque échantillonnage, le calculateur (13) calcule le vecteur (A- Aref), le calculateur (13) calcule la dérivée directionnelle S ˙ du vecteur de S pour chacun des états Vi possibles du vecteur tension de phase Vs,le calculateur (13) calcule le produit scalaire de chacune des dérivées directionnelles S ˙ (Vi) du vecteur de sortie S avec le vecteur (A- Aref),le calculateur choisit comme vecteur de commande C l'état Vi du vecteur tension de phase Vs associé au plus grand des produits scalaires calculés. - Procédé de régulation d'une machine tournante selon la revendication 1 tel que, la stratégie de contrôle pour un régime établi dans lequel le couple Tem et le flux statorique s sont compris respectivement dans un intervalle
±ΔTem autour de Temref et dans un intervalle ±Δ s autour de fsref.
le calculateur (13) choisit parmi tous les états Vi possibles du vecteur tension de phase stator Vs celui qui, pour une fréquence moyenne de découpage de l'onduleur (3) préétablie, est optimal
pour minimiser les amplitudes des oscillations du couple Tem et du flux statorique s autour respectivement du couple Temref et du flux statorique sref de consigne, et/ou pour respecter un gabarit fréquentiel pour le couple Tem ;
le calculateur (13) restitue des signaux de commandes (6) pour commander les SPmLL (4) selon l'état choisi du vecteur tension de phase Vs. - Procédé selon l'une des revendications 1 ou 2 tel que, en outre, dans l'étape d'initialisation du procédé
on construit, dans le calculateur (13) un chemin (15) cyclique de circulation du point A autour du point Aref dans l'élément de plan (5).
le calculateur divise l'élément de plan (5) en zones Zi de commutation adaptées au chemin cyclique (15),
on rentre dans le calculateur une fréquence moyenne de découpage pour l'onduleur (3),
le calculateur construit une table de commutation dans laquelle pour chaque zone Zi il fait correspondre l'état Vf optimal futur du vestion tension de phase stator Vs en fonction des états actuels Va et passé Vp du vecteur tension de phase stator Vs pour suivre le chemin cyclique (15) de circulation dans ladite zone Zi ; et en ce que
en régime établi, et à chaque échantillonnage,
le calculateur (13) calcule tes tailles des zones Zi de commutation en fonction de la configuration instantanée de la machine, de manière à respecter la fréquence moyenne de découpage choisie
le calculateur choisit comme vecteur de commande C l'état Vf optimal futur du vecteur tension de phase stator Vs à partir de la table de commutation, en fonction de la zone Zi où se trouve le point A, et des états actuels Va et passé Vp du vecteur tension de phase stator Vs. - Procédé selon l'une des revendications 1 à 3 tel que le modèle de la machine tournante est un modèle non linéaire, affine en la commande du type :
- Procédé selon l'une des revendications 1 à 4 tel que l'élément de plan (5) comprend une bande d'hystérésis ayant une borne intérieure (12) et une borne extérieure (11) telles que :le basculement de la stratégie de contrôle en régime transitoire vers la stratégie de contrôle en régime établi se fait lorsque le point A a franchi la borne intérieure (12) de la bande d'hystérésis ; etle basculement de la stratégie de contrôle en régime établi vers la stratégie de contrôle en régime transitoire se fait lorsque le point A a franchi la borne extérieure (11) de la bande d'hystérésis.
- Dispositif d'asservissement d'une machine tournante (1) à n Phases alimentée en courant alternatif par l'intermédiaire d'un onduleur de tension (3), comprenant n SPmLL (4) définissant mn états Vi (i∈{1,..,mn}) du vecteur tension de phase stator Vs, ladite machine pouvant être asservie en couple électromagnétique Tem et un flux statorique s à un couple électromagnétique Temref et à un flux statorique SSref par ledit dispositif d'asservissement comprenant un ensemble de capteurs dont les valeurs captées (7, 8 , 9) peuvent être transmises à un observateur (10), les sorties de l'observateur (10) pouvant être injectées dans un calculateur (13), ledit calculateur (13) pouvant restituer en sortie des signaux de commandes (6) destinés à commander les SPmLL (4) de l'onduleur de tension (3),
caractérisé en ce que ledit dispositif met en oeuvre le procédé selon l'une quelconque des revendications 1 à 5. - Application du dispositif selon la revendication 6 à une machine tournante à n Phases alimentée en courant alternatif par l'intermédiaire d'un onduleur de tension (3), comprenant n SPmLL (4) définissant mn états Vi (i∈ {1,..,mn}) du vecteur tension de phase stator Vs, ladite machine pouvant être asservie en couple électromagnétique Tem et en flux statorique s à un couple électromagnétique Temref et à un flux statorique sref par un dispositif d'asservissement comprenant un ensemble de capteurs dont les valeurs captées ( 7, 8, 9) peuvent être transmises à un observateur (10), les sorties de l'observateur (10) pouvant être injectées dans un calculateur (13), ledit calculateur (13) pouvant restituer en sortie des signaux de commandes (6) destinés à commander les SPmLL (4) de l'onduleur de tension (3), ledit dispositif d'asservissement étant selon la revendication 6.
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| FR9607015 | 1996-06-06 | ||
| FR9607015A FR2749717B1 (fr) | 1996-06-06 | 1996-06-06 | Procede de controle commande d'une machine tournante, systeme d'asservissement pour mettre en oeuvre ledit procede, machine tournante pourvue d'un tel systeme |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| EP0812059A1 EP0812059A1 (fr) | 1997-12-10 |
| EP0812059B1 true EP0812059B1 (fr) | 2003-02-26 |
| EP0812059B8 EP0812059B8 (fr) | 2003-05-21 |
Family
ID=9492782
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP97401181A Expired - Lifetime EP0812059B8 (fr) | 1996-06-06 | 1997-05-29 | Procédé de contrôle commande d'une machine tournante, dispositif d'asservissement pour mettre en oeuvre ledit procédé et application du dispositif à une machine tournante |
Country Status (15)
| Country | Link |
|---|---|
| US (1) | US5907228A (fr) |
| EP (1) | EP0812059B8 (fr) |
| JP (1) | JPH1066400A (fr) |
| KR (1) | KR980006793A (fr) |
| CN (1) | CN1097756C (fr) |
| AT (1) | ATE233448T1 (fr) |
| AU (1) | AU714400B2 (fr) |
| BR (1) | BR9703478A (fr) |
| CA (1) | CA2208008A1 (fr) |
| CZ (1) | CZ172897A3 (fr) |
| DE (1) | DE69719240T2 (fr) |
| FR (1) | FR2749717B1 (fr) |
| HU (1) | HUP9701008A3 (fr) |
| PL (1) | PL320397A1 (fr) |
| SK (1) | SK71597A3 (fr) |
Families Citing this family (14)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| FR2791488B1 (fr) * | 1999-03-25 | 2002-09-20 | Schneider Electric Sa | Systeme de controle d'un onduleur de tension |
| FI112299B (fi) | 2000-12-22 | 2003-11-14 | Abb Industry Oy | Menetelmä taajuusmuuttajan yhteydessä |
| CA2517579A1 (fr) * | 2002-02-28 | 2003-09-04 | Zetacon Corporation | Systeme et procede de commande predictive |
| US7121269B2 (en) * | 2003-04-16 | 2006-10-17 | Michael North | Hot-start solenoid valve |
| US7274865B2 (en) * | 2003-09-04 | 2007-09-25 | Patricio Lagos Lehuede | General purpose 100% solid state drive for direct current rotary machines |
| DE602004008674T2 (de) * | 2004-02-05 | 2008-06-12 | Honeywell International Inc. | Motorsteuerung und antrieb für ansprechzeitverbesserung einer electrischen anwendung |
| ATE428215T1 (de) * | 2004-12-10 | 2009-04-15 | Abb Research Ltd | Verfahren zum betrieb einer rotierenden elektrischen maschine |
| EP2034606B1 (fr) | 2007-09-10 | 2015-03-11 | ABB Research Ltd. | Procédé destiné au fonctionnement d'une machine électrique rotative |
| KR100933393B1 (ko) * | 2007-10-31 | 2009-12-22 | 울산대학교 산학협력단 | 유도 전동기의 직접 토크 제어 장치 및 방법 |
| DE102008002505A1 (de) * | 2008-06-18 | 2009-12-24 | Robert Bosch Gmbh | Verfahren zum Betrieb einer elektrischen Antriebsvorrichtung und Steuergerät |
| JP5391697B2 (ja) * | 2009-01-16 | 2014-01-15 | 株式会社デンソー | 回転機の制御装置及び制御システム |
| JP5391696B2 (ja) * | 2009-01-16 | 2014-01-15 | 株式会社デンソー | 回転機の制御装置及び制御システム |
| EP2528225B1 (fr) * | 2010-01-22 | 2014-01-15 | ABB Research Ltd. | Commande d'une machine électrique rotative |
| WO2023147088A1 (fr) * | 2022-01-28 | 2023-08-03 | Tau Motors, Inc. | Commande de moteur utilisant un modèle affine par morceaux |
Family Cites Families (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4707651A (en) * | 1986-07-22 | 1987-11-17 | Westinghouse Electric Corp. | Voltage-controlled field-oriented induction motor control system |
| US5585709A (en) * | 1993-12-22 | 1996-12-17 | Wisconsin Alumni Research Foundation | Method and apparatus for transducerless position and velocity estimation in drives for AC machines |
| US5708346A (en) * | 1994-01-10 | 1998-01-13 | Sulzer Electronics Ag | Method and control apparatus for controlling an AC-machine |
| US5502360A (en) * | 1995-03-10 | 1996-03-26 | Allen-Bradley Company, Inc. | Stator resistance detector for use in electric motor controllers |
-
1996
- 1996-06-06 FR FR9607015A patent/FR2749717B1/fr not_active Expired - Fee Related
-
1997
- 1997-05-29 DE DE69719240T patent/DE69719240T2/de not_active Expired - Fee Related
- 1997-05-29 EP EP97401181A patent/EP0812059B8/fr not_active Expired - Lifetime
- 1997-05-29 AT AT97401181T patent/ATE233448T1/de not_active IP Right Cessation
- 1997-06-04 CZ CZ971728A patent/CZ172897A3/cs unknown
- 1997-06-05 CA CA002208008A patent/CA2208008A1/fr not_active Abandoned
- 1997-06-05 HU HU9701008A patent/HUP9701008A3/hu unknown
- 1997-06-05 SK SK715-97A patent/SK71597A3/sk unknown
- 1997-06-05 US US08/870,413 patent/US5907228A/en not_active Expired - Fee Related
- 1997-06-05 PL PL97320397A patent/PL320397A1/xx unknown
- 1997-06-05 AU AU24703/97A patent/AU714400B2/en not_active Ceased
- 1997-06-06 JP JP9149099A patent/JPH1066400A/ja active Pending
- 1997-06-06 BR BR9703478A patent/BR9703478A/pt active Search and Examination
- 1997-06-06 CN CN97114854A patent/CN1097756C/zh not_active Expired - Fee Related
- 1997-06-07 KR KR1019970023530A patent/KR980006793A/ko not_active Application Discontinuation
Also Published As
| Publication number | Publication date |
|---|---|
| HUP9701008A2 (hu) | 1998-01-28 |
| ATE233448T1 (de) | 2003-03-15 |
| CA2208008A1 (fr) | 1997-12-06 |
| EP0812059A1 (fr) | 1997-12-10 |
| FR2749717A1 (fr) | 1997-12-12 |
| US5907228A (en) | 1999-05-25 |
| CN1177758A (zh) | 1998-04-01 |
| FR2749717B1 (fr) | 1998-07-31 |
| AU714400B2 (en) | 2000-01-06 |
| DE69719240T2 (de) | 2003-12-04 |
| EP0812059B8 (fr) | 2003-05-21 |
| CN1097756C (zh) | 2003-01-01 |
| DE69719240D1 (de) | 2003-04-03 |
| AU2470397A (en) | 1997-12-11 |
| HU9701008D0 (en) | 1997-07-28 |
| CZ172897A3 (en) | 1997-12-17 |
| PL320397A1 (en) | 1997-12-08 |
| JPH1066400A (ja) | 1998-03-06 |
| KR980006793A (ko) | 1998-03-30 |
| HUP9701008A3 (en) | 2000-03-28 |
| SK71597A3 (en) | 1998-01-14 |
| BR9703478A (pt) | 1998-08-04 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP0812059B1 (fr) | Procédé de contrôle commande d'une machine tournante, dispositif d'asservissement pour mettre en oeuvre ledit procédé et application du dispositif à une machine tournante | |
| EP2246973B1 (fr) | Procédé de détermination de la position du vecteur de flux d'un moteur | |
| EP0579948B1 (fr) | Dispositif de commande d'un moteur asynchrone | |
| FR2867324A1 (fr) | Dispositif de commande de machine synchrone a champs enroules | |
| FR2681483A1 (fr) | Circuit de commande de moteur a induction. | |
| EP0770430A1 (fr) | Procédé et dispositif de pilotage d'actionneurs à ulta-sons de puissance | |
| FR2681194A1 (fr) | Procede pour determiner la vitesse angulaire de glissement d'un moteur a induction. | |
| FR2486328A1 (fr) | Dispositif perfectionne d'economie d'energie pour moteurs a induction | |
| WO2004057270A1 (fr) | Gyrometre vibrant avec asservissement de la frequence de detection sur la frequence d'excitation | |
| EP1686682B1 (fr) | Procédé et système de limitation du courant en sortie d'un variateur de vitesse fonctionnant selon une loi de commande U/F. | |
| EP0858155A1 (fr) | Procédé de régulation d'une machine tournante, système d'asservissement pour mettre en oeuvre ledit procédé, et machine tournante pourvue d'un tel système | |
| EP2605400B1 (fr) | Procédé de commande d'un onduleur pour l'alimentation électrique d'un moteur, et module de commande associé | |
| EP1233506A1 (fr) | Procédé et dispositif de commande de régulation d'une machine électrique tournante à courant alternatif, en particulier synchrone | |
| EP1703628B1 (fr) | Procédé et système pour la commande d'un moteur électrique en cas de défluxage | |
| EP3322084A1 (fr) | Procede de controle du demarrage d'un moteur electrique synchrone triphase sans collecteur | |
| EP0702451A1 (fr) | Dispositif de commande d'un moteur synchrone | |
| EP1484835A2 (fr) | Procédé et système de régulation du couple électromagnétique instantané, et support d'enregistrement pour la mise en oeuvre du procédé | |
| EP0469509B1 (fr) | Procédé et dispositif de commande de moteur asynchrone par régulation de flux d'induction magnétique | |
| EP0388845A1 (fr) | Système de commande vectorielle pour moteur électrique asynchrone à cage | |
| EP1586858B1 (fr) | Procédé de commande en push-pull d'un gyrometre à laser | |
| EP3166220B1 (fr) | Dispositif de limitation dynamique et procede de limitation dynamique par un tel dispositif | |
| EP3824540B1 (fr) | Procédé de détermination de la position et de la vitesse du rotor d'une machine électrique synchrone à rotor bobiné | |
| EP3529889B1 (fr) | Procedes et dispositifs relatifs a l'estimation d'une position angulaire d'un rotor | |
| EP0545222A1 (fr) | Dispositif de contrôle de couple d'un moteur électrique asynchrone | |
| FR3062003A1 (fr) | Systeme de commande pour une machine electrique tournante |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| AK | Designated contracting states |
Kind code of ref document: A1 Designated state(s): AT BE CH DE DK ES FI GB GR IE IT LI LU MC NL PT SE |
|
| AX | Request for extension of the european patent |
Free format text: AL PAYMENT 970630;LT PAYMENT 970630;LV PAYMENT 970630;RO PAYMENT 970630;SI PAYMENT 970630 |
|
| 17P | Request for examination filed |
Effective date: 19980610 |
|
| RAP3 | Party data changed (applicant data changed or rights of an application transferred) |
Owner name: ALCATEL |
|
| RAP3 | Party data changed (applicant data changed or rights of an application transferred) |
Owner name: ALCATEL |
|
| 17Q | First examination report despatched |
Effective date: 19991221 |
|
| RTI1 | Title (correction) |
Free format text: CONTROL PROCESS FOR A ROTARY MACHINE, DEVICE FOR CARRYING OUT THIS PROCESS AND APPLICATION OF THE SYSTEM AT A ROTARY MACHINE |
|
| RTI1 | Title (correction) |
Free format text: CONTROL PROCESS FOR A ROTARY MACHINE, DEVICE FOR CARRYING OUT THIS PROCESS AND APPLICATION OF THE SYSTEM AT A ROTARY MACHINE |
|
| GRAG | Despatch of communication of intention to grant |
Free format text: ORIGINAL CODE: EPIDOS AGRA |
|
| GRAG | Despatch of communication of intention to grant |
Free format text: ORIGINAL CODE: EPIDOS AGRA |
|
| GRAH | Despatch of communication of intention to grant a patent |
Free format text: ORIGINAL CODE: EPIDOS IGRA |
|
| GRAH | Despatch of communication of intention to grant a patent |
Free format text: ORIGINAL CODE: EPIDOS IGRA |
|
| GRAA | (expected) grant |
Free format text: ORIGINAL CODE: 0009210 |
|
| AK | Designated contracting states |
Designated state(s): AT BE CH DE DK ES FI GB GR IE IT LI LU MC NL PT SE |
|
| AX | Request for extension of the european patent |
Extension state: AL LT LV RO SI |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: NL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20030226 Ref country code: IT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT;WARNING: LAPSES OF ITALIAN PATENTS WITH EFFECTIVE DATE BEFORE 2007 MAY HAVE OCCURRED AT ANY TIME BEFORE 2007. THE CORRECT EFFECTIVE DATE MAY BE DIFFERENT FROM THE ONE RECORDED. Effective date: 20030226 Ref country code: IE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20030226 Ref country code: GR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20030226 Ref country code: FI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20030226 Ref country code: AT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20030226 |
|
| REG | Reference to a national code |
Ref country code: GB Ref legal event code: FG4D Free format text: NOT ENGLISH |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: EP |
|
| REG | Reference to a national code |
Ref country code: IE Ref legal event code: FG4D Free format text: FRENCH |
|
| REF | Corresponds to: |
Ref document number: 69719240 Country of ref document: DE Date of ref document: 20030403 Kind code of ref document: P |
|
| RIN2 | Information on inventor provided after grant (corrected) |
Inventor name: BETHOUX, OLIVIER Inventor name: POULLAIN, SERGE Inventor name: THOMAS, JEAN-LUC Inventor name: BORNARD, GUY,C/O LAB. D'AUTOMATIQUE DE GRENOBLE |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: NV Representative=s name: CABINET ROLAND NITHARDT CONSEILS EN PROPRIETE INDU |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: PT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20030526 Ref country code: DK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20030526 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: LU Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20030529 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MC Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20030531 |
|
| GBT | Gb: translation of ep patent filed (gb section 77(6)(a)/1977) |
Effective date: 20030520 |
|
| REG | Reference to a national code |
Ref country code: SE Ref legal event code: TRGR |
|
| NLV1 | Nl: lapsed or annulled due to failure to fulfill the requirements of art. 29p and 29m of the patents act | ||
| LTIE | Lt: invalidation of european patent or patent extension |
Effective date: 20030226 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: ES Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20030828 |
|
| REG | Reference to a national code |
Ref country code: IE Ref legal event code: FD4D Ref document number: 0812059E Country of ref document: IE |
|
| PLBE | No opposition filed within time limit |
Free format text: ORIGINAL CODE: 0009261 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: NO OPPOSITION FILED WITHIN TIME LIMIT |
|
| 26N | No opposition filed |
Effective date: 20031127 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: DE Payment date: 20050510 Year of fee payment: 9 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: SE Payment date: 20050512 Year of fee payment: 9 Ref country code: CH Payment date: 20050512 Year of fee payment: 9 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: GB Payment date: 20050517 Year of fee payment: 9 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: BE Payment date: 20050606 Year of fee payment: 9 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: GB Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20060529 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20060530 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: LI Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20060531 Ref country code: CH Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20060531 Ref country code: BE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20060531 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: DE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20061201 |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: PL |
|
| EUG | Se: european patent has lapsed | ||
| GBPC | Gb: european patent ceased through non-payment of renewal fee |
Effective date: 20060529 |
|
| BERE | Be: lapsed |
Owner name: *ALCATEL Effective date: 20060531 |