EP0657284B1 - Einrichtung zum automatischen Ein- und/oder Auszug von flexiblen Druckplatten - Google Patents
Einrichtung zum automatischen Ein- und/oder Auszug von flexiblen Druckplatten Download PDFInfo
- Publication number
- EP0657284B1 EP0657284B1 EP94118916A EP94118916A EP0657284B1 EP 0657284 B1 EP0657284 B1 EP 0657284B1 EP 94118916 A EP94118916 A EP 94118916A EP 94118916 A EP94118916 A EP 94118916A EP 0657284 B1 EP0657284 B1 EP 0657284B1
- Authority
- EP
- European Patent Office
- Prior art keywords
- gripper system
- plate
- printing
- cylinder
- print cylinder
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Lifetime
Links
Images




Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B41—PRINTING; LINING MACHINES; TYPEWRITERS; STAMPS
- B41F—PRINTING MACHINES OR PRESSES
- B41F27/00—Devices for attaching printing elements or formes to supports
- B41F27/12—Devices for attaching printing elements or formes to supports for attaching flexible printing formes
- B41F27/1206—Feeding to or removing from the forme cylinder
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B41—PRINTING; LINING MACHINES; TYPEWRITERS; STAMPS
- B41P—INDEXING SCHEME RELATING TO PRINTING, LINING MACHINES, TYPEWRITERS, AND TO STAMPS
- B41P2227/00—Mounting or handling printing plates; Forming printing surfaces in situ
- B41P2227/60—Devices for transferring printing plates
- B41P2227/61—Devices for transferring printing plates using the sheet feed system
Landscapes
- Feeding Of Articles By Means Other Than Belts Or Rollers (AREA)
Description
- Die Erfindung betrifft eine Einrichtung zum automatischen Ein- und/oder Auszug von flexiblen Druckplatten an Druckmaschinen.
Es ist ein Verfahren und eine Einrichtung zum automatischen Ein und /oder Auszug von flexiblen Druckplatten auf/von einen mit Plattengreifern versehenen Druckformzylinder über an der Druckmaschine vorhandene Bogenfördermittel und einen mit Hilfsgreifern versehenen Zwischenzylinder bekannt (DE 42 20 011). - Die Förderung der Druckplatte über den Bogenweg bedeutet, daß die Druckplattenvorderkante in der Anlage an den Vordermarken ausgerichtet und über die bekannten Bogenfördermittel, beispielsweise die Übergabetrommel und der Druckzylinder, gefördert wird. Dabei nimmt die Druckplattenvorderkante die gleiche Position ein wie die Bogenvorderkante.
Es tritt das Problem auf, daß der Abstand des frühestmöglichen Druckeinsatzes von der Vorderkante bei der Druckplatte größer als beim Bogen ist. - Aufgabe der Erfindung ist der Ausgleich des Phasenversatzes der Druckeinsatzlinien bezogen auf die Bogenvorderkante und die Druckplattenvorderkante beim automatischen Ein- und/oder Auszug von Druckplatten über den Bogenweg.
- Erfindungsgemäß wird die Aufgabe durch das Kennzeichen des Patentanspruches 1 gelöst.
Nachfolgend wird die Erfindung an einem Ausführungsbeispiel näher beschrieben.
In den Zeichnungen zeigen - Fig. 1:
- Bogendruckmaschine
- Fig. 2:
- Phasenversatz
- Fig. 3:
- Bewegliches Greifersystem
- Fig. 4:
- Bewegliches Hilfsgreifersystem (Radiusbahn)
- Fig. 5:
- Bewegliches Hilfsgreifersystem (Koppelbahn)
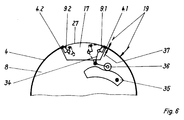
- Fig. 6:
- Bewegliches Plattengreifersystem
- In Fig. 1 ist die Ansicht einer Bogendruckmaschine dargestellt, die aus einer Zuführeinrichtung, zwei identisch aufgebauten Druckwerken 2 und einer nicht dargestellten Abführeinrichtung besteht.
Die Zuführeinrichtung, die zu den Druckwerken 2 führt, setzt sich zusammen aus einem Anleger 1, einem Anlegtisch 3, einem Vorgreifer 10, einer Anlegtrommel 11 und einer Ausrichteinrichtung 12 und je nach Position des Druckwerkes 2 aus einem oder mehreren zum Druckwerk führenden Bogenfördermitteln Die Bogenfördermittel sind als Bogenführungszylinder oder als nicht dargestellte Kettenführungen ausgestaltet.
Bogenführungszylinder sind die Zylinder, die im Normalbetrieb den Bogen 18 und im Druckplattenförderbetrieb auch die Druckplatte 4 mit Hilfe vorhandener Greifersysteme 5 befördern, wie die Übergabetrommel 13, der Druckzylinder 14 und bei Schön- und Widerdruckmaschinen, die nicht dargestellte SW-Trommel.
Der jeweils letzte Bogenführungszylinder in einem Druckwerk 2, der Druckzylinder 14, liegt an einem als Gummizylinder ausgebildeten Zwischenzylinder 6 an.
In dem Zwischenzylinderkanal 15 des Zwischenzylinders 6 ist ein Hilfsgreifersystem 7 zum Druckplattentransport angeordnet.
Auf dem Zwischenzylinder 6 ist das Gummituch 16 mit allgemein bekannten Spannmitteln gespannt.
Der Zwischenzylinder 6 korrespondiert mit dem Druckformzylinder 8, der als Plattenzylinder ausgebildet ist. In dem Druckformzylinderkanal 17 ist ein Plattengreifersystem 9 jeweils für die Druckplattenvorderkante 4.1 und die Druckplattenhinterkante 4.2 angeordnet, von dem die dem Druckformzylinder 8 zugeführte Druckplatte 4 gehalten und gespannt wird. - Bei der Förderung der Druckplatte 4 mittels der Greifersysteme 5, 7, 9 wird durch dieselben die Druckplattenvorderkante 4.1 in der gleichen Art und Weise wie die Bogenvorderkante 18.1 erfaßt (Fig. 2). Der Abstand der Bogenvorderkante 18.1 zur Druckeinsatzlinie 19 entspricht dabei nicht dem Abstand der Druckplattenvorderkante 4.1 zur Druckeinsatzlinie 19, d.h. es ergibt sich ein Phasenversatz P.
Da die Druckeinsatzlinien 19 im Druckbetrieb die gleiche Lage einnehmen und deckungsgleich mit der maschinenbedingten Solldruckeinsatzlinie 37 sein müssen, ist der Phasenversatz P beim Druckplattenförderbetrieb auszugleichen.
Zum Ausgleich des Phasenversatzes P ist mindestens ein Greifersystem 5, 7, 9 relativ zur Bogen- und/oder Druckplattenförderrichtung beweglich ausgestaltet, wobei beim Einzug der Druckplatten 4 eine Bewegung in Drehrichtung und beim Auszug der Druckplatten entgegen der Drehrichtung erfolgt. Für den Normalbetrieb (Druckbetrieb) verbleiben die Greifersysteme in der Ausgangsstellung Einzug von Druckplatten.
Zur Realisierung des Ausgleiches des Phasenversatzes über das Greifersystem 5 dient das in Fig. 3 dargestellte beweglich gestaltete Greifersystem 5 des Druckzylinders 14.
Der Druckzylinder 14 und der Zwischenzylinder 6 verbleiben beim Druckplattenförderbetrieb relativ zueinander in der gleichen Lage wie beim Normalbetrieb.
Das Hilfsgreifersystem 7 des Zwischenzylinders 6 ist um den Betrag des Phasenversatzes P im Zwischenzylinder gegenüber der Kanalkante 20 versetzt angeordnet. Das Hilfsgreifersystem 7 ist im Normalbetrieb bis unter die Zwischenzylinderperipherie schwenkbar. Das Greifersystem 5 des Druckzylinders 14 ist auf Rollen 23 gelagert, welche über eine Koppel 24 mit einem mit einer Kurve 25 in Wirkverbindung stehenden Rollenhebel 26 verbunden ist. Die Rollen 23 und damit das Greifersystem 5 rollen vorzugsweise auf einer Radiusbahn 22 ab; andere Kurvenbahnen sind denkbar.
Zur Realisierung des Ausgleiches des Phasenversatzes P über das Hilfsgreifersystem 7 dient das in Fig. 4 dargestellte, beweglich gestaltete Hilfsgreifersystem 7. Das Hilfsgreifersystem 7 ist an einem Hebelarm 29 im Zwischenzylindermittelpunkt 30, verschwenkbar auf einer Zwischenzylinderradiusbahn 28, gelagert.
Der Hebelarm 29 ist mit einem Rollenhebelarm 31, der mit einer Betätigungskurve 32 in Wirkverbindung steht, verbunden.
Die Druckplatte 4 wird von dem Greifersystem 5 des Druckzylinders 14 durch das Hilfsgreifersystem 7 des Zwischenzylinders 6 übernommen und von dem Hilfsgreifersystem 7 nach dem Phasenversatzausgleich an das Plattengreifersystem 9 übergeben, welches in dem Druckformzylinderkanal 17 des Druckformzylinders 8 angeordnet ist.
Das Plattengreifersystem 9 ist in der Übernahme-/Übergabe- und in der Betriebsstellung, die der Stellung im Normalbetrieb entspricht, dargestellt.
Das vordere Plattengreifersystem 9.1 ist so angeordnet, daß dieses die Druckplattenvorderkante 4.1 übernimmt, und nach der Übernahme unter die Druckformzylinderperipherie 27 des Druckformzylinders 8 in die Betriebsstellung gesenkt wird.
Im Druckformzylinder 8 ist weiterhin ein absenkbares hinteres Plattengreifersystem 9.2 angeordnet, das die Druckplattenhinterkante 4.2 im Bereich der Druckformzylinderperipherie 27 des Druckformzylinders 8 erfaßt und durch Absenken gleichzeitig spannt.
Zur Realisierung des Ausgleiches des Phasenversatzes P über das Hilfsgreifersystem 7 dient in einer weiteren Ausführungsvariante das im Zwischenzylinder 6 angeordnete Hilfsgreifersystem 7 mit einem zugeordneten Koppelgetriebe 33 (Fig. 5).
Das Koppelgetriebe ist so ausgelegt, daß es den Hilfsgreifersystem 7 in Druckplattenförderrichtung zum Zwecke des Ausgleiches des Phasenversatzes P bewegt, den Hilfsgreifersystem 7 zum Zwecke der Übergabe an das bzw. der Übernahme von dem Plattengreifersystem 9 in radialer Richtung bewegt und schwenkt.
Die Schwenk- und Radialbewegung ermöglicht es, das Plattengreifersystem 9 fest unterhalb der Druckformzylinderperipherie 27 anzuordnen.
Zur Realisierung des Ausgleiches des Phasenversatzes P über das Plattengreifersystem 9 dient das im Druckformzylinder 8 beweglich angeordnete Plattengreifersystem 9 (Fig. 6).
Das Plattengreifersystem 9 ist an einem Winkelhebel 34, welcher eine Kurvenrolle 36 trägt, die mit einer Schwenkkurve 35 in Wirkverbindung steht, verbunden.
Die Stellung, bei der die Übernahme der Druckplatte 4 erfolgt, ist voll ausgezogen dargestellt; die Betriebsstellung ist gestrichelt dargestellt. Das Plattengreifersystem kann einmal in die Betriebsstellung bis unter die Druckformzylinderperipherie 27 (Fig. 6) oder nur in Umfangsrichtung - in dieser Stellung wird das Plattengreifersystem 9 nicht bis unter die Druckformzylinderperipherie geführt - verschoben werden.
Es ist ersichtlich, daß die Druckeinsatzlinie 19 mit der Solldruckeinsatzlinie 37 in Einklang gebracht wurde. - Nachfolgend wird die Wirkungsweise der erfindungsgemäßen Einrichtung näher beschrieben.
Der automatische Einzug von flexiblen Druckplatten 4 auf den als Plattenzylinder ausgebildeten Druckformzylinder 8 einer Bogendruckmaschine läuft wie nachfolgend beschrieben ab. - Die Druckplatte 4 wird auf dem Bogenweg über den Zwischenzylinder 6 dem Druckformzylinder 8 zugeführt.
Die Zuführung der Druckplatte 4 beginnt analog der Zuführung von Bogen mit der Vereinzelung am Anleger 1, der die Druckplatte 4 an den Anlegtisch 3 übergibt. Auf den Anlegtisch 3 erfolgt die Ausrichtung der Druckplatte 4 mit Hilfe einer für die Bogenausrichtung vorhandenen Ausrichteinrichtung 12. Anschließend wird die Druckplatte 4 analog dem nicht dargestellten Bogen über den Vorgreifer 10 und die Anlegtrommel 11 zum Druckzylinder 14 des ersten Druckwerkes und bei nachgeordneten weiteren Druckwerken vom Druckzylinder 14 des ersten Druckwerkes über eine Übergabetrommel 13 zum Druckzylinder des zweiten Druckwerkes und analog zu weiteren Druckwerken mit den vorhandenen Greifersystemen 5 weitergeführt. Danach wird die Druckplatte 4 vom Druckzylinder 14 an den als Gummizylinder ausgebildeten Zwischenzylinder 6 übergeben.
Die Übergabe der Druckplatte 4 erfolgt von dem vorhandenen Greifersystem 5 des Druckzylinders 14 an das im Zwischenzylinderkanal 15 des Zwischenzylinders 6 angeordneten Hilfsgreifersystem 7.
Von dem Hilfsgreifersystem 7 wird die Druckplatte 4 in das Plattengreifersystem 9 übergeben.
Nach der Übernahme der Druckplattenvorderkante 4.1 durch das vordere Plattengreifersystem 9.1 im Bereich der Druckformzylinder peripherie 27, wird das vordere Plattengreifersystem 9.1 aus der Druckformzylinderperipherie 27 abgesenkt, der Druckformzylinder 8 gedreht und die Druckplattenhinterkante 4.2 durch das hintere Plattengreifersystem 9.2 im Bereich der Druckformzylinderperipherie 27 erfaßt und geklemmt. Danach erfolgt die Absenkung des hinteren Plattengreifersystems 9.2, wodurch die Druckplatte 4 auf dem Druckformzylinder 8 gespannt wird.
Die Druckmaschine ist im Normalbetrieb/Druckbetrieb geometrisch so ausgelegt, daß die Solldruckeinsatzlinien 37 des Druckformzylinders 8, des Zwischenzylinders 6 und des Druckzylinders 14 bei der Drehung derselben zur Deckung gebracht werden. Dies bedeutet natürlich auch, daß die Solldruckeinsatzlinie 37 des Druckzylinders 14 mit der Druckeinsatzlinie 19 auf dem sich vom Greifersystem 5 gehaltenen Bogen 18 zur Erzielung eines optimalen Druckergebnisse in Übereinstimmung befinden muß.
Umgekehrt bedeutet dies, da der Abstand der Bogenvorderkante 18.1 zur Druckeinsatzlinie 19 und der Abstand der Druckplattenvorderkante 4.1 zur Druckeinsatzlinie 19 unterschiedlich, aber sowohl die Druckplatte 4 als auch der Bogen 18 von den Greifersystemen der Bogenführungsmechanismen gehalten werden, daß ein Phasenversatz P zwischen der Druckeinsatzlinie 19 auf dem Bogen 18 und der Druckeinsatzlinie auf der Druckplatte 4 auftritt (Fig. 2).
Dieser Phasenversatz P wird durch die beschriebenen und in den Figuren 3 ... 6 dargestellten Einrichtungen bei dem Ein- und/oder Auszug von Druckplatten, d.h. im Druckplattenförderbetrieb, ausgeglichen.
Zum Ausgleich des Phasenversatzes P mittels des im Druckzylinder 14 beweglich angeordneten Greifersystems 5 wird die Druckplatte 4 zusätzlich zur Zylinderbewegung noch um den Betrag des Phasenversatzes P in Druckplattenförderrichtung bewegt und an das im Zwischenzylinder 6 angeordnete Hilfsgreifersystem 7 übergeben (Fig. 3). Das Hilfsgreifersystem 7 des Zwischenzylinders 6 kann die Druckplatte 4 in der versetzten Lage übernehmen, da dasselbe im Zwischenzylinder um den Betrag des Phasenversatzes P versetzt angeordnet ist.
Die Lage der Solldruckeinsatzlinie 37 und die Lage der Druckeinsatzlinie 19 sind, bezogen auf den Zwischenzylinder 6, damit gleich und die Druckplatte 4 kann nunmehr an das Plattengreifersystem 9, d.h. an das vordere Plattengreifersystem 9.1, übergeben werden.
Zur Druckplattenübergabe befindet sich das Plattengreifersystem 9 über der Druckformzylinderperipherie 27. Nach der Übernahme wird das Plattengreifersystem 9 bis unter die Druckformzylinderperipherie 27 abgesenkt.
Das im Zwischenzylinder 6 angeordnete Hilfsgreifersystem 7 wird nach der Druckplattenübergabe an den Druckformzylinder 8 in eine unwirksame Stellung unterhalb der Zwischenzylinderperipherie gebracht.
Vorzugsweise erfolgt die Bewegung des Greifersystems 5 im Druckzylinderkanal 21 auf einer Radiusbahn 22 durch das Getriebe 23; 24; 25; 26.
Zum Ausgleich des Phasenversatzes P mittels des im Zwischenzylinder 6 beweglich angeordneten Hilfsgreifersystems 7 wird die Druckplatte 4 nach der Übernahme vom Greifersystem 5 des Druckzylinders 14 zusätzlich zur Zylinderbewegung noch um den Betrag des Phasenversatzes P in Druckplattenförderrichtung bewegt und an das im Druckformzylinder 8 angeordnete Plattengreifersystem 9 übergeben (Fig. 4). Die Übernahme der Druckplatte 4 durch das Hilfsgreifersystem 7 vom Greifersystem 5 des Druckzylinders 14 erfolgt mit Phasenversatz P, wobei der Phasenversatz P durch die Bewegung des Hilfsgreifersystems 7 ausgeglichen und damit die Voraussetzung geschaffen wird, daß das vordere Plattengreifersystem 9.1 die Druckplatte 4 ohne Phasenversatz P - Solldruckeinsatzlinie 37 und Druckeinsatzlinie 19 sind bezogen auf den Druckformzylinder 8 gleich - übernehmen kann.
Vorzugsweise erfolgt die Bewegung des Hilfsgreifersystems 7 im Zwischenzylinderkanal 15 auf einer Zwischenzylinderradiusbahn 28 um den Zwischenzylindermittelpunkt 30 mittels des Getriebes 31; 32.
Zur Druckplattenübergabe befindet sich das Plattengreifersystem 9 über der Druckformzylinderperipherie 27. Nach der Übernahme wird das Plattengreifersystem 9 bis unter die Druckformzylinderperipherie 27 abgesenkt.
Zum Ausgleich des Phasenversatzes P mittels des im Zwischenzylinder 6 beweglich angeordneten Hilfsgreifersystems 7 wird die vom Greifersystem 5 des Druckzylinders übernommene Druckplatte 4 zusätzlich zur Zylinderbewegung noch um den Betrag des Phasenversatzes P in Druckplattenförderrichtung bewegt und an das im Druckformzylinder 8 unterhalb der Druckformzylinderperipherie 27 angeordnete Plattengreifersystem 9 übergeben (Fig. 5). Neben der Bewegung in Druckplattenförderrichtung führt das Hilfsgreifersystem 7 noch eine Bewegung in radialer Richtung und eine Schwenkbewegung aus. Dies ist erforderlich, um die Druckplatte 4 an das unterhalb der Druckformzylinderperipherie 27 in Normalbetriebsstellung angeordnete Plattengreifersystem 9 übergeben zu können.
Die Übernahme der Druckplatte 4 durch das Hilfsgreifersystem 7 vom Greifersystem 5 des Druckzylinders 14 erfolgt mit Phasenversatz P, wobei der Phasenversatz durch die Bewegung des Hilfsgreifersystems 7 in Druckplattenförderrichtung ausgeglichen und damit die Voraussetzung geschaffen wird, daß das vordere Plattengreifersystem 9.1 die Druckplatte 4 ohne Phasenversatz P übernehmen kann.
Als Antrieb für die drei Bewegungen des Hilfsgreifersystems 7 wird ein Koppelgetriebe 33 verwendet.
Zum Ausgleich des Phasenversatzes P mittels des im Druckformzylinder 8 beweglich angeordneten Plattengreifersystems 9 wird die vom Greifersystem 5 des Druckzylinders 14 über das Hilfsgreifersystem 7 des Zwischenzylinders 6 geförderte Druckplatte 4 zusätzlich zur Zylinderbewegung noch um den Betrag des Phasenversatzes P in Druckplattenförderrichtung bewegt (Fig. 6).
Die Übernahme der Druckplatte 4 durch das Plattengreifersystem 9 vom Greifersystem 5 des Druckzylinders 14 über das Hilfsgreifersystem 7 des Zwischenzylinders 6 erfolgt mit Phasenversatz P.
Die Eliminierung des Phasenversatzes P erfolgt durch die Bewegung des vorderen Plattengreifersystems 9.1 in Druckplattenbewegungsrichtung, wobei das vordere Plattengreifersystem 9.1 vorzugsweise mittels eines Getriebes 34; 35; 36 so bewegt wird, daß das vordere Plattengreifersystem 9.1 nach dem Ausgleich des Phasenversatzes unter die Druckformzylinderperipherie 27 gesteuert wird.
Der Auszug von flexiblen Druckplatten erfolgt in umgekehrter Reihenfolge analog zum Einzug der Druckplatten. -
- 1
- Anleger
- 2
- Druckwerk
- 3
- Anlegtisch
- 4
- Druckplatte
- 4.1
- Druckplattenvorderkante
- 4.2
- Druckplattenhinterkante
- 5
- Greifersystem
- 6
- Zwischenzylinder
- 7
- Hilfsgreifersystem
- 8
- Druckformzylinder
- 9
- Plattengreifersystem
- 9.1
- vorderes Plattengreifersystem
- 9.2
- hinteres Plattengreifersystem
- 10
- Vorgreifer
- 11
- Anlegtrommel
- 12
- Ausrichteinrichtung
- 13
- Übergabetrommel
- 14
- Druckzylinder
- 15
- Zwischenzylinderkanal
- 16
- Gummituch
- 17
- Druckformzylinderkanal
- 18
- Bogen
- 18.1
- Bogenvorderkante
- 19
- Druckeinsatzlinie
- 20
- Kanalkante
- 21
- Druckzylinderkanal
- 22
- Radiusbahn
- 23
- Rolle
- 24
- Koppel
- 25
- Kurve
- 26
- Rollenhebel
- 27
- Druckformzylinderperipherie
- 28
- Zwischenzylinderradiusbahn
- 29
- Hebelarm
- 30
- Zwischenzylindermittelpunkt
- 31
- Rollenhebelarm
- 32
- Betätigungskurve
- 33
- Koppelgetriebe
- 34
- Winkelhebel
- 35
- Schwenkkurve
- 36
- Kurvenrolle
- 37
- Solldruckeinsatzlinie
- P
- Phasenversatz
Claims (8)
- Einrichtung zum automatischen Ein- und/oder Auszug von flexiblen Druckplatten (4) auf/von mindestens einem mit einem Plattengreifersystem (9) versehenen Druckformzylinder (8) einer Druckmaschine über an der Druckmaschine vorhandene, mit Greifersystemen (5) bestückte Bogenführungszylinder (13,14) enthaltende Bogenfördermittel und einem mit einem Hilfsgreifersystem (7) versehenen Zwischenzylinder (6), dadurch gekennzeichnet, daß mindestens ein Greifersystem (5; 7; 9) zum Ausgleich des Phasenversatzes (P) der Druckeinsatzlinien (19) bezogen auf die Druckplattenvorderkante (4.1) und die Bogenvorderkante (18.1) relativ zur Bogen- und/oder Druckplattenförderrichtung beweglich ausgestaltet ist.
- Einrichtung zum automatischen Ein- und/oder Auszug von flexiblen Druckplatten nach Anspruch 1, dadurch gekennzeichnet, daß das im Zwischenzylinder (6) angeordnete Hilfsgreifersystem (7) um den Betrag des Phasenversatzes (P) der Druckeinsatzlinien (19) bezogen auf die Druckplattenvorderkante (4.1) und die Bogenvorderkante (18.1) in Druckplattenförderrichtung versetzt angeordnet und das Greifersystem (5) des Druckzylinders (14) im Druckzylinderkanal (21) in Bogen-und Druckplattenförderrichtung auf einer Radiusbahn (22) um den Betrag des Phasenversatzes (P) verschiebbar angeordnet ist.
- Einrichtung zum automatischen Ein- und/oder Auszug von flexiblen Druckplatten nach Anspruch 1, dadurch gekennzeichnet, daß das im Druckformzylinder (8) angeordnete Plattengreifersystem (9) radial bis auf und unter die Druckformzylinderperipherie (27) des Druckformzylinders (8) beweglich angeordnet und das Hilfsgreifersystem (7) des Zwischenzylinders (6) im Zwischenzylinderkanal (15) in Druckplattenförderrichtung auf einer Zwischenzylinderradiusbahn (28) um den Betrag des Phasenversatses (P) verschwenkbar angeordnet ist.
- Einrichtung zum automatischen Ein- und/oder Auszug von flexiblen Druckplatten nach Anspruch 1, dadurch gekennzeichnet, daß dem im Zwischenzylinder (6) angeordneten Hilfsgreifersystem (7) ein Koppelgetriebe (33) zum Zwecke des Ausglelches des Phasenversatzes (P) in Druckplattenförderrichtung und zum Zwecke der Übergabe auf das bzw. die Übernahme von dem im Druckformzylinder (8) unterhalb der Druckformzylinderperipherie (27) angeordnete Plattengreifersystem (9) schwenkbar und in Druckplattenförderrichtung und in radialer Richtung bewegbar zugeordnet ist.
- Einrichtung zum automatischen Ein- und/oder Auszug von flexiblen Druckplatten nach Anspruch 1, dadurch gekennzeichnet, daß das Plattengreifersystem (9) des Druckformzylinders (8) im Druckformzylinderkanal (17) in Druckplattenförderrichtung auf einer Druckformzylinderradiusbahn verschwenkbar angeordnet ist.
- Einrichtung zum automatischen Ein- und/oder Auszug von flexiblen Druckplatten nach Anspruch 1, dadurch gekennzeichnet, daß das Plattengreifersystem (9) des Druckformzylinders (8) im Druckformzylinderkanal (17) in Druckplattenförderrichtung auf einer Kurvenbahn bis unter die Druckformzylinderperipherie (27) führbar angeordnet ist.
- Einrichtung zum automatischen Ein- und/oder Auszug von flexiblen Druckplatten nach einem der vorhergehenden Ansprüche, dadurch gekennzeichnet, daß das Greifersystem (5; 7; 9) beim Einzug von flexiblen Druckplatten (4) in Normaldrehrichtung verschiebbar ist.
- Einrichtung zum automatischen Ein- und/oder Auszug von flexiblen Druckplatten nach einem der vorhergehenden Ansprüche, dadurch gekennzeichnet, daß das Greifersystem (5; 7; 9) beim Auszug von flexiblen Druckplatten (4) entgegen der Normaldrehrichtung verschiebbar ist.
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| DE4341358A DE4341358A1 (de) | 1993-12-04 | 1993-12-04 | Einrichtung zum automatischen Ein- und/oder Auszug von flexiblen Druckplatten |
| DE4341358 | 1993-12-04 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| EP0657284A1 EP0657284A1 (de) | 1995-06-14 |
| EP0657284B1 true EP0657284B1 (de) | 1997-03-19 |
Family
ID=6504176
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP94118916A Expired - Lifetime EP0657284B1 (de) | 1993-12-04 | 1994-12-01 | Einrichtung zum automatischen Ein- und/oder Auszug von flexiblen Druckplatten |
Country Status (2)
| Country | Link |
|---|---|
| EP (1) | EP0657284B1 (de) |
| DE (2) | DE4341358A1 (de) |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE10203059B4 (de) * | 2001-02-20 | 2014-12-04 | Heidelberger Druckmaschinen Ag | Vorrichtung mit einem ein Greifersystem aufweisenden Zylinder |
Family Cites Families (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE3721879A1 (de) * | 1987-07-02 | 1989-01-12 | Heidelberger Druckmasch Ag | Verfahren und druckmaschine zum herstellen von mehrfarbigen abdrucken |
| DE4220011C2 (de) * | 1992-05-16 | 1995-09-07 | Kba Planeta Ag | Verfahren und Einrichtung zum automatischen Ein- und/oder Auszug von flexiblen Druckplatten |
-
1993
- 1993-12-04 DE DE4341358A patent/DE4341358A1/de not_active Withdrawn
-
1994
- 1994-12-01 EP EP94118916A patent/EP0657284B1/de not_active Expired - Lifetime
- 1994-12-01 DE DE59402137T patent/DE59402137D1/de not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| EP0657284A1 (de) | 1995-06-14 |
| DE59402137D1 (de) | 1997-04-24 |
| DE4341358A1 (de) | 1995-06-08 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP0291721B1 (de) | Bogen-Rotationsdruckmaschine zur Herstellung von einseitigem Mehrfarbendruck oder Schön- und Widerdruck | |
| DE102009041230B4 (de) | Verfahren und Vorrichtung zur seitlichen Ausrichtung eines Bogens in einer Verarbeitungsmaschine | |
| DE102009008781B4 (de) | Vorrichtung zum Ausrichten von Bogen mittels auf einem Zylinder angeordneter Anschläge | |
| DE102012014806A1 (de) | Verfahren und Vorrichtung zum Druckplattenwechsel | |
| EP0563746B1 (de) | Bogenwendeeinrichtung in einer Rotationsdruckmaschine | |
| DE102007040694A1 (de) | Verfahren und Vorrichtung zur Umstellung der Betriebsart von Schön- auf Schön- und Widerdruck in einer Bogen verarbeitenden Maschine | |
| DE2451987A1 (de) | Bogenfuehrungszylinder | |
| DE19833903A1 (de) | Verfahren zur Übernahme einer Bogenhinterkante von einem vorgeordneten Zylinder einer Bogenrotationsdruckmaschine | |
| DE4439092C2 (de) | Vorrichtung zum Zuführen von Bogen | |
| DE19901699B4 (de) | Verfahren und eine Vorrichtung zur Durchführung des Verfahrens zur Beseitigung von rhythmischen Passerfehlern in Rotationsdruckmaschinen | |
| EP0919379A1 (de) | Verfahren und Vorrichtung zur Übergabe der Hinterkante eines Bogens in einer Wendeeinrichtung einer Bogenrotationsdruckmaschine | |
| EP0976553A2 (de) | Verfahren und Vorrichtung zur Übergabe der Hinterkante eines Bogens in einer Wendeeinrichtung einer Bogenrotationsdruckmaschine | |
| EP0657284B1 (de) | Einrichtung zum automatischen Ein- und/oder Auszug von flexiblen Druckplatten | |
| DE102008031275A1 (de) | Vorrichtung zur seitlichen Ausrichtung von Bedruckstoffbogen | |
| DE4220011C2 (de) | Verfahren und Einrichtung zum automatischen Ein- und/oder Auszug von flexiblen Druckplatten | |
| DE102007051203B4 (de) | Vorrichtung zum Fördern eines Bogens durch eine drucktechnische Maschine | |
| EP0657286B1 (de) | Einrichtung zum automatischen Ein- und/oder Auszug von flexiblen Druckplatten | |
| EP3463888B1 (de) | Vorderkantenausrichtung in anlegeeinheit | |
| DE10158467B4 (de) | Druckmaschine und Verfahren zum Bedrucken eines Bogens | |
| EP1864799B1 (de) | Vorrichtung zum Leiten von Bogen in Druckmaschinen | |
| EP0657285B1 (de) | Druckplattenförderlogistik für Druckmaschinen | |
| EP1120249B1 (de) | Bogenleiteinrichtung | |
| DE19617545C1 (de) | Saugerführungsgetriebe | |
| EP0939702B1 (de) | Verfahren und einrichtung zum transport von bogen | |
| DE4239895A1 (de) | Zuführeinrichtung für den automatischen Einzug von flexiblen Druckplatten |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| AK | Designated contracting states |
Kind code of ref document: A1 Designated state(s): DE FR GB IT |
|
| 17P | Request for examination filed |
Effective date: 19950714 |
|
| GRAG | Despatch of communication of intention to grant |
Free format text: ORIGINAL CODE: EPIDOS AGRA |
|
| GRAH | Despatch of communication of intention to grant a patent |
Free format text: ORIGINAL CODE: EPIDOS IGRA |
|
| 17Q | First examination report despatched |
Effective date: 19960430 |
|
| GRAH | Despatch of communication of intention to grant a patent |
Free format text: ORIGINAL CODE: EPIDOS IGRA |
|
| GRAA | (expected) grant |
Free format text: ORIGINAL CODE: 0009210 |
|
| AK | Designated contracting states |
Kind code of ref document: B1 Designated state(s): DE FR GB IT |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT;WARNING: LAPSES OF ITALIAN PATENTS WITH EFFECTIVE DATE BEFORE 2007 MAY HAVE OCCURRED AT ANY TIME BEFORE 2007. THE CORRECT EFFECTIVE DATE MAY BE DIFFERENT FROM THE ONE RECORDED. Effective date: 19970319 |
|
| REF | Corresponds to: |
Ref document number: 59402137 Country of ref document: DE Date of ref document: 19970424 |
|
| GBT | Gb: translation of ep patent filed (gb section 77(6)(a)/1977) |
Effective date: 19970424 |
|
| ET | Fr: translation filed | ||
| PLBE | No opposition filed within time limit |
Free format text: ORIGINAL CODE: 0009261 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: NO OPPOSITION FILED WITHIN TIME LIMIT |
|
| 26N | No opposition filed | ||
| REG | Reference to a national code |
Ref country code: FR Ref legal event code: TP Ref country code: FR Ref legal event code: CD |
|
| REG | Reference to a national code |
Ref country code: GB Ref legal event code: IF02 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: GB Payment date: 20041125 Year of fee payment: 11 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: DE Payment date: 20041222 Year of fee payment: 11 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: FR Payment date: 20041230 Year of fee payment: 11 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: GB Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20051201 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: DE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20060701 |
|
| GBPC | Gb: european patent ceased through non-payment of renewal fee |
Effective date: 20051201 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: FR Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20060831 |
|
| REG | Reference to a national code |
Ref country code: FR Ref legal event code: ST Effective date: 20060831 |