EP0186596A1 - Regelsystem zur linearen Verschiebung mit einem Gleichstrommotor - Google Patents
Regelsystem zur linearen Verschiebung mit einem Gleichstrommotor Download PDFInfo
- Publication number
- EP0186596A1 EP0186596A1 EP85402601A EP85402601A EP0186596A1 EP 0186596 A1 EP0186596 A1 EP 0186596A1 EP 85402601 A EP85402601 A EP 85402601A EP 85402601 A EP85402601 A EP 85402601A EP 0186596 A1 EP0186596 A1 EP 0186596A1
- Authority
- EP
- European Patent Office
- Prior art keywords
- motor
- control
- pulses
- error signal
- comparator
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 238000006073 displacement reaction Methods 0.000 title claims description 13
- 238000000034 method Methods 0.000 claims abstract description 14
- 230000033001 locomotion Effects 0.000 claims description 17
- 230000005540 biological transmission Effects 0.000 claims description 5
- 239000003990 capacitor Substances 0.000 claims description 4
- 230000010355 oscillation Effects 0.000 claims description 3
- 238000013519 translation Methods 0.000 claims description 2
- 230000000694 effects Effects 0.000 description 6
- 230000008901 benefit Effects 0.000 description 4
- 238000006243 chemical reaction Methods 0.000 description 4
- 239000000463 material Substances 0.000 description 4
- 238000012360 testing method Methods 0.000 description 3
- 125000004122 cyclic group Chemical group 0.000 description 2
- 230000007423 decrease Effects 0.000 description 2
- 238000010586 diagram Methods 0.000 description 2
- 239000002184 metal Substances 0.000 description 2
- 229910000831 Steel Inorganic materials 0.000 description 1
- -1 and the rod Substances 0.000 description 1
- 238000011161 development Methods 0.000 description 1
- 238000007599 discharging Methods 0.000 description 1
- 230000010354 integration Effects 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 230000003068 static effect Effects 0.000 description 1
- 239000010959 steel Substances 0.000 description 1
Images




Classifications
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D3/00—Control of position or direction
- G05D3/12—Control of position or direction using feedback
- G05D3/14—Control of position or direction using feedback using an analogue comparing device
- G05D3/18—Control of position or direction using feedback using an analogue comparing device delivering a series of pulses
Definitions
- the present invention relates to a method for controlling a DC motor for a position control, to a control device according to the method and to a linear movement control system according to this same method.
- the aforementioned devices remain subject, however, to the constraints of use specific to DC motors usually used in position control systems which will be described below in conjunction with FIGS. 1 and 2 relating to the conventional solutions usually used for this type of motor.
- the electric motors usually used for these types of control are characterized by a high torque and a high speed of rotation.
- the electronic control of a servo motor can usually be carried out either in proportional mode or in all or nothing mode.
- the voltage supplied to the motor 3 is inversely proportional to the difference X between the instantaneous position of the motor shaft given for example by a feedback system r and the final theoretical position of the shaft represented by a reference signal c, the voltage applied to the motor 3 being generated by means of a subtractor circuit 1 and if necessary an amplifier circuit 2.
- V threshold a threshold voltage denoted V threshold .
- Proportional mode control is known to allow good precision in stopping the motor shaft in position as well as a soft stop thereof.
- it has the drawbacks of poor efficiency due to the electrical power dissipated in the electronic circuits and especially of the existence of a permanent current, in the motor, in a stop position, current due to the voltage of motor threshold which has the effect of causing permanent dissipation in the control circuits. This phenomenon presents the risk of thermal runaway and circuit breakage.
- the application of a setpoint or command voltage or signal c to the input of the subtractor 1 has the effect of generating at the output of the latter an error voltage S capable in turn of triggering a generator 4 capable of delivering a direct voltage directly applied to the motor.
- the motor voltage V motor then suddenly goes from maximum to zero when the instantaneous position of the feedback signal r, representative of the position of the motor shaft, is close to the theoretical position.
- the voltage actually applied to the motor and the stroke of the latter's shaft substantially represented by the replica signal r are shown.
- Controlling in all or nothing mode unlike controlling in proportional mode has the advantage of an absence of risk of thermal tripping due to the absence of current through the motor in a stop position thereof.
- the precision of stopping the motor and therefore of the position control is less good than in proportional mode and brutal and jerky operation presents a risk of position instability if one wishes to have a practical position error from the theoretical stop position, compatible with the usual requirements in this area.
- the object of the present invention is to remedy the aforementioned drawbacks by implementing a control method, a control device and a linear displacement control system for a DC motor in which the drawbacks of the proportional control and all or nothing control are deleted.
- the motor is controlled by a series of pulses with variable duty cycle whose average value is proportional to the difference between the instantaneous position of the motor shaft and the motor stop position in theoretical final position.
- the direct current motor control device of the invention comprises, in the direct motor control chain, means generating a series of pulses with variable duty cycle intended from the error signal to control direct from the engine.
- the pulses delivered by the generator means have an average value proportional to the difference between the instantaneous position of the motor shaft and the engine stop position in the theoretical final position.
- FIGS. 3a and 3b represent an illustrative block diagram the method and the control device of the invention as well as graphs representative of the stroke of the motor shaft and of the control signals applied thereto,
- FIG. 4 represents a particular embodiment of a pulse generator capable of delivering pulses with variable duty cycle
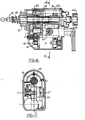
- Figure 6 shows in longitudinal section a complete linear movement control system precision according to the invention
- FIG. 7 represents in a cross section, the linear movement control system, as represented in FIG. 6.
- the position error signal is generated by means of a subtracting device 1, from a setpoint or control signal and a feedback signal r representative of the position of the shaft. of the motor 3.
- the feedback system is represented by a mechanical connection indicated in broken lines diagramming the control of a potentiometer for example.
- the motor 3 is controlled by a series of pulses with variable duty cycle, the average value of the amplitude of which is substantially proportional to the difference between the instantaneous position of the motor shaft and the position of stopping the motor in position. theoretical final.
- the instantaneous position of the motor shaft is given by the feedback signal r, and the stop position of the motor in theoretical end position is represented by the reference signal c.
- the pulses with variable duty cycle are delivered by a pulse generator 5 receiving on an input the error signal ⁇ and delivering on an output terminal the pulses applied to an armature terminal of the motor.
- the control pulses have a duration Ti for any pulse of order i proportional to the value of the error signal E. Without limitation, the control pulses each have the same amplitude.
- the time interval between two successive pulses, time interval ⁇ i between two successive pulses of order i and of order i + 1, is inversely proportional to the average voltage applied to the motor 3.
- the successive pulses have the same frequency of recurrence.
- the time scale being however greatly expanded in order to allow a clear representation of the waveform actually applied as the motor control signal
- the location of the points Ai representative of the mean value of l 'pulse of order i at time t i midpoint of the recurrence of order i substantially reconstructs the voltage waveform applied to the motor 3 in control in proportional mode as shown in FIG.
- the voltage actually applied to the motor consists of a series of pulses by all or nothing, the control method of the invention thus making it possible to combine the advantages of proportional control and of control in all or nothing mode well than not having their drawbacks.
- pulse generator means with variable duty cycle will now be described in conjunction with FIG. 4.
- These pulse generator means are preferably constituted by an oscillator of the oscillator type with releaser capable of delivering a series of to ratio pulses cyclic variable, such that the duration of each pulse is proportional to the value of the error signal, the time interval between two successive pulses being inversely proportional to the average voltage applied to the motor.
- a particularly suitable type of oscillation comprises a comparator 50, a first positive input of which receives the error signal E and a second negative input of which is connected to a capacitor 51 capable, by successive charge and discharge, of generating relaxation oscillations. .
- a feedback loop 53 from the output of the comparator 50 on the positive input and a feedback loop 52 from the output of the comparator 50 on the negative input allow to ensure respectively the inverse proportionality of the time interval between two successive pulses at the average voltage applied to the motor and the proportionality of the duration of each pulse to the value of the error signal.
- the comparator 50 can be constituted by an operational amplifier.
- FIG. 4 the terminal of the capacitor 51 not connected to the negative input of the comparator has been shown connected to the reference voltage. Due to the slowly varying nature of the error signal E with respect to the charging and discharging time constant of the capacitor 51 and of the related circuits, this terminal can for example be connected to the input terminal of the signal error E for the sole reason of practical convenience in constructing the circuits.
- the reaction and feedback circuits 53, 52 are made by resistive elements.
- the device comprises a first control chain comprising in cascade a first comparator CI 1 capable of generating a first error signal ⁇ 1 with respect to a setpoint signal c and a second comparator CI 2 operating as an oscillator with variable duty cycle whose the output is directly connected to one of the motor armature terminals.
- a second control chain also includes in cascade a third comparator CI 3 capable of generating a second error signal ⁇ 2 with respect to the same control signal C and a fourth comparator C 4 operating as an oscillator with variable cyclic ratio whose output is directly connected to the other armature terminal of the motor.
- a supply circuit D 1 , C1 provides a supply of the entire device with a determined DC voltage Vcc.
- the voltage Vcc is for example the battery voltage of the automobile, ie 12 volts.
- a bias circuit represented in FIG. 5a by the resistors R 4 , R 5 , R 6 makes it possible to generate a direct voltage of value substantially equal to half of the supply voltage.
- This bias voltage is supplied to the negative and positive input of the first and third comparators, respectively.
- a feedback circuit represented in FIG. 5a by the potentiometer P 1 mechanically connected to the motor 3 by the link symbolized in dotted lines delivers to the positive and negative input of the first and third comparators respectively, a signal representative of the position of the motor shaft.
- the different waveforms represented in FIG. 5b A, B, CD, E, F make it possible to understand the operation of the device.
- the setpoint signal cf for example applied at A is for example a negative jump in voltage of value between 12 volts and zero for example.
- the feedback signal r represented at point B is applied to the positive and respectively negative input of the first and third comparators.
- the downward phase of the feedback signal r causes the appearance of the error signal ⁇ 1 at C at the output of comparator 1 and simultaneously a series of pulses with variable duty cycle at D at the output of comparator CI 2 which are applied to the motor and cause it to rotate in a first direction.
- the equilibrium position of the motor having been reached, the feedback signal r having reached its horizontal static phase represented in FIG. 5bD, any further modification of the reference signal c represented for example by a return to the original value of this signal in FIG.
- a resistance R 5 of low value is inserted into the resistance bridge R 4 , R 6 intended to generate the so-called bias voltage equal to half of the supply voltage substantially .
- This resistor R 5 of low value has the effect of generating an offset on the value of the bias voltage, an offset which in fact constitutes a hysteresis threshold for the error voltage.
- any error signal below this threshold value has the effect of reducing the output voltage of either the comparator CI 1 , either of the comparator C1 2 to zero and therefore of causing the relaxation oscillators constituted by the comparators CI 2 and CI 4 to stop.
- the resistors denoted R 13 , R 14 and R 15 , R 16 respectively play the role of the feedback 52 and reaction 53 circuits of the relaxation oscillator shown in FIG. 4.
- the system includes of course, a DC motor 3 controlled according to the method of the invention.
- This system comprises in a system body 60 a gear train 61 engaged on the motor shaft 62 and capable of ensuring the transmission of the rotational movement of the motor shaft 62 with a determined reduction ratio.
- One of the pinions referenced 613 in FIG. 6 and forming the gear 61 is integral in movement with a sheath 63 movable in rotation about an axis ⁇ parallel to the direction of linear displacement control.
- the sleeve 63 is further fixed in translation in this direction relative to to the body of the system 60.
- a control rod 64 for linear movement is screwed into the sheath 63 and driven in linear movement by the sheath 63 during the rotation of the latter.
- the system body and the sleeve can for example be made of molded material, of plastic material for example, while the control rod 64 is preferably a metal rod.
- the sheath 63 has on its external part a toothed wheel or the like on which a bansmission 66 is meshed.
- the transmission 66 is mounted so as to drive the axis of rotation of a potentiometer 67 constituting the shaft position feedback potentiometer motor 3.
- FIG. 7 is a cross-sectional view along a plane denoted AA of FIG. 6, the axis of rotation of the feedback potentiometer 67 is orthogonal to the direction A of linear motion control.
- the sheath has on its internal wall a threaded area 630 into which the linear displacement control rod 64 is screwed.
- the threaded area 630 does not cover the entire inner wall of the sleeve but that it is for example located at the end thereof.
- this tapped zone 630 can be arranged in a substantially symmetrical manner with respect to the abovementioned plane of section AA, this plane being orthogonal to the direction of control of linear movement and containing the axis of rotation of the feedback potentiometer 67.
- This arrangement has the effect of minimizing the effects of temperature variations which may cause corresponding position variations of the feedback potentiometer due to almost total compensation for variations due to the expansion of the sheath, taking into account the symmetry of the structure described with respect to the axis of the potentiometer.
- the length of the tapped zone 630 can be reduced to a minimum so as to however ensure good transmission of the linear translational movement to the control rod 64 without however causing appreciable changes in size of this tapped zone as a function of the temperature. .
- control rod 64 has at the end opposite the control end a knurled button 640 allowing, by screwing the rod 64 into the sheath, an adjustment of the original position of the control rod.
- the rod 64 includes a spring 68 for taking up play integral with the body of the system.
Landscapes
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Engineering & Computer Science (AREA)
- Automation & Control Theory (AREA)
- Control Of Direct Current Motors (AREA)
- Control Of Position Or Direction (AREA)
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| FR8419804A FR2575345B1 (fr) | 1984-12-26 | 1984-12-26 | Procede et dispositif de commande d'un moteur a courant continu pour asservissement de position, systeme de commande de deplacement lineaire selon le procede |
| FR8419804 | 1984-12-26 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| EP0186596A1 true EP0186596A1 (de) | 1986-07-02 |
| EP0186596B1 EP0186596B1 (de) | 1990-07-18 |
Family
ID=9310968
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP85402601A Expired - Lifetime EP0186596B1 (de) | 1984-12-26 | 1985-12-23 | Regelsystem zur linearen Verschiebung mit einem Gleichstrommotor |
Country Status (6)
| Country | Link |
|---|---|
| US (1) | US4977360A (de) |
| EP (1) | EP0186596B1 (de) |
| JP (1) | JP2814397B2 (de) |
| DE (1) | DE3578753D1 (de) |
| ES (1) | ES8704679A1 (de) |
| FR (1) | FR2575345B1 (de) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP0306611A2 (de) * | 1987-08-18 | 1989-03-15 | Hella KG Hueck & Co. | Einrichtung zum Steuern oder Regeln der Lage eines Stellglieds mit Servomotor und Rückmeldepotentiometer |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE19820273A1 (de) * | 1998-05-07 | 1999-11-18 | Kurt Sinske | Verfahren und Vorrichtung zur Positionierung eines Gegenstandes |
| KR100434236B1 (ko) * | 2001-10-11 | 2004-06-04 | 페어차일드코리아반도체 주식회사 | 모터 제어 구동 회로 |
| DE102006023458B4 (de) * | 2006-05-18 | 2008-03-06 | Siemens Ag | Lageregelverfahren für eine Achse |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| FR1369512A (fr) * | 1963-07-03 | 1964-08-14 | Ferodo Sa | Dispositif onduleur |
| US4177412A (en) * | 1976-12-15 | 1979-12-04 | Matsushita Electric Industrial Co., Ltd. | Closed loop rotational speed control system having means for generating a PNM signal for an electric motor |
| DE3021063A1 (de) * | 1980-06-04 | 1981-12-10 | Gisbert Dr.-Ing. 8912 Kaufering Wermuth | Einrichtung zum transversalen und rotatorischen positionieren einer bearbeitungseinheit an einer werkzeugmaschine |
| FR2540647A1 (fr) * | 1983-02-04 | 1984-08-10 | Valeo | Dispositif de pilotage automatique d'embrayage |
Family Cites Families (20)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| BE754493A (fr) * | 1969-08-11 | 1971-01-18 | Malavasi Claude | Doseur electrique de puissance et son utilisation a la commanded'un circuit de regulation differentielle |
| DE2120458A1 (de) * | 1971-04-26 | 1972-11-02 | Daimler-Benz Ag, 7000 Stuttgart | Schaltungsanordnung zur genauen Einstellung elektromagnetischer Stellglieder als Funktion einer Gleichspannung |
| US3743911A (en) * | 1971-06-18 | 1973-07-03 | Gen Electric | Servomotor pulse width control circuit capable of compensating for variations in supply voltage |
| US3958131A (en) * | 1974-05-29 | 1976-05-18 | Staley Elevator Company, Inc. | Solid state power control apparatus |
| US4112342A (en) * | 1974-08-06 | 1978-09-05 | Varco, Inc. | Solid state controller |
| US3936715A (en) * | 1974-08-09 | 1976-02-03 | Edo-Aire Mitchell Industries, Inc. | Electronic trim system |
| JPS5923196B2 (ja) * | 1976-07-30 | 1984-05-31 | 沖電気工業株式会社 | デイジタルサ−ボ方式 |
| JPS5385583A (en) * | 1977-01-07 | 1978-07-28 | Seiko Seiki Kk | Numerical value controlling transeer machine |
| US4146828A (en) * | 1977-09-12 | 1979-03-27 | Linear Instruments Corporation | Pulse-modulated servo amplifier |
| US4288730A (en) * | 1978-09-25 | 1981-09-08 | General Motors Corporation | Proportional and integral solenoid armature positioning control system |
| JPS55120392A (en) * | 1979-03-09 | 1980-09-16 | Futaba Corp | Motor servocircuit |
| FR2460383A1 (fr) * | 1979-06-28 | 1981-01-23 | Peugeot Aciers Et Outillage | Dispositif pour la commande electrique des leve-vitres notamment d'un vehicule automobile |
| US4300081A (en) * | 1980-03-14 | 1981-11-10 | General Motors Corporation | Motor voltage feedback for a servo motor control system |
| US4571530A (en) * | 1981-08-04 | 1986-02-18 | Unisen, Inc. | Adaptive pulsing motor control for positioning system |
| JPS58141688A (ja) * | 1982-02-15 | 1983-08-23 | Toshiba Corp | デジタルサ−ボ装置 |
| US4442390A (en) * | 1982-07-06 | 1984-04-10 | Davis Kenneth W | Feedback system for a linear actuator |
| JPS5963992A (ja) * | 1982-10-04 | 1984-04-11 | Fujitsu Ltd | 直流モ−タの位置決め制御装置 |
| US4546296A (en) * | 1983-05-12 | 1985-10-08 | Westinghouse Brake & Signal | Electric actuators |
| IN161426B (de) * | 1983-05-12 | 1987-11-28 | Westinghouse Brake & Signal | |
| US4546298A (en) * | 1983-05-12 | 1985-10-08 | Westinghouse Brake & Signal Co. | Electric actuators |
-
1984
- 1984-12-26 FR FR8419804A patent/FR2575345B1/fr not_active Expired
-
1985
- 1985-12-18 ES ES550114A patent/ES8704679A1/es not_active Expired
- 1985-12-23 DE DE8585402601T patent/DE3578753D1/de not_active Expired - Lifetime
- 1985-12-23 EP EP85402601A patent/EP0186596B1/de not_active Expired - Lifetime
- 1985-12-25 JP JP60290903A patent/JP2814397B2/ja not_active Expired - Fee Related
-
1988
- 1988-08-16 US US07/233,913 patent/US4977360A/en not_active Expired - Lifetime
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| FR1369512A (fr) * | 1963-07-03 | 1964-08-14 | Ferodo Sa | Dispositif onduleur |
| US4177412A (en) * | 1976-12-15 | 1979-12-04 | Matsushita Electric Industrial Co., Ltd. | Closed loop rotational speed control system having means for generating a PNM signal for an electric motor |
| DE3021063A1 (de) * | 1980-06-04 | 1981-12-10 | Gisbert Dr.-Ing. 8912 Kaufering Wermuth | Einrichtung zum transversalen und rotatorischen positionieren einer bearbeitungseinheit an einer werkzeugmaschine |
| FR2540647A1 (fr) * | 1983-02-04 | 1984-08-10 | Valeo | Dispositif de pilotage automatique d'embrayage |
Non-Patent Citations (1)
| Title |
|---|
| E.D.N. ELECTRICAL DESIGN NEWS, vol. 28, no. 10, mai 1983, pages 195-206, Boston, Massachusetts, US; J. WILLIAMS et al.: "Use motor-drive IC to solve tricky design problems" * |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP0306611A2 (de) * | 1987-08-18 | 1989-03-15 | Hella KG Hueck & Co. | Einrichtung zum Steuern oder Regeln der Lage eines Stellglieds mit Servomotor und Rückmeldepotentiometer |
| EP0306611A3 (en) * | 1987-08-18 | 1989-10-18 | Hella Kg Hueck & Co. | Device for monitoring or controlling the position of an actuator with servomotor and feedback potentiometer |
Also Published As
| Publication number | Publication date |
|---|---|
| EP0186596B1 (de) | 1990-07-18 |
| US4977360A (en) | 1990-12-11 |
| JP2814397B2 (ja) | 1998-10-22 |
| ES8704679A1 (es) | 1987-04-16 |
| FR2575345B1 (fr) | 1987-03-20 |
| FR2575345A1 (fr) | 1986-06-27 |
| JPS61157287A (ja) | 1986-07-16 |
| DE3578753D1 (de) | 1990-08-23 |
| ES550114A0 (es) | 1987-04-16 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| FR2634293A2 (fr) | Systeme de regulation du point de fonctionnement d'une alimentation a courant continu en zone de caracteristique generateur de tension ou de courant imposee | |
| EP0652835B1 (de) | Kraftfahrzeug mit elektrischem antrieb | |
| FR2682659A1 (fr) | Appareil de commande de direction a puissance electrique. | |
| EP0338926A1 (de) | Vorrichtung zur Hochspannungsstromversorgung des Betriebsstromkreises eines Kraftfahrzeuges | |
| CA1248172A (fr) | Convertisseur de puissance a controle par cycles | |
| FR2820904A1 (fr) | Dispositif generateur d'une tension de reference precise | |
| EP0186596B1 (de) | Regelsystem zur linearen Verschiebung mit einem Gleichstrommotor | |
| EP0016666A2 (de) | Elektrohydraulischer Wandler, insbesondere zum Drucksteuern in einem automatischen Getriebe | |
| FR2624969A1 (fr) | Dispositif a resistance pour mesurer le niveau d'un liquide dans un recipient, en particulier le niveau de l'huile dans un moteur d'automobile | |
| EP0956501B1 (de) | Gerät zur messung des sauerstottgehaltes im einem gas | |
| FR2703796A1 (fr) | Procédé et dispositif de positionnement d'une installation de réglage. | |
| EP0735801B1 (de) | Verbesserungen in Schaltungen zum Betreiben von Entladungslampen in Fahrzeugscheinwerfern | |
| EP0148685B1 (de) | Gleichstromdifferenzverstärkeranordnung, insbesondere zum Messen von geringen Spannungen mit langsamen Veränderungen | |
| EP0159263B1 (de) | Verfahren und Vorrichtung zur Kontrolle des Flüssigkeitsstandes in einem Tank | |
| EP0434490B1 (de) | Betriebssteuerungseinrichtung zweier, an eine gemeinsame Achse eines Wechselstromgenerators gekoppelter Verbrennungsmotoren | |
| EP0678751B1 (de) | Detektorvorrichtung für Änderungen einer Versorgungsspannung | |
| EP0367668A1 (de) | Positionssteuereinrichtung zur Lageregelung eines beweglichen Organs in verschiedene diskrete Stellungen, speziell für die Neigung von Automobilscheinwerfern | |
| FR2786284A1 (fr) | Procede de controle de mouvement d'un element servocommande | |
| EP0966049A1 (de) | Piezoelektrischer Motor mit integriertem Positionssensor | |
| EP0643310B1 (de) | Einrichtung zur Überwachung der Entladung einer Vielzahl in Reihe geschalteter Batterien | |
| EP0651704B1 (de) | Vorrichtung zum steuern von positionen von bewegungsachsen | |
| EP0466539A1 (de) | Steuerungseinrichtung zur Neigung eines Fahrzeugscheinwerfers | |
| EP0557218B1 (de) | Ventil-Steuerschaltung | |
| FR2627916A1 (fr) | Dispositif de commande de moteur a courant continu | |
| EP0625769B1 (de) | Übertragungsschaltung für eine wesentliche Gleichspannung mit galvanischer Trennung zwischen Eingang und Ausgang |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| AK | Designated contracting states |
Kind code of ref document: A1 Designated state(s): DE IT SE |
|
| 17P | Request for examination filed |
Effective date: 19860804 |
|
| 17Q | First examination report despatched |
Effective date: 19880506 |
|
| RAP1 | Party data changed (applicant data changed or rights of an application transferred) |
Owner name: VALEO VISION |
|
| GRAA | (expected) grant |
Free format text: ORIGINAL CODE: 0009210 |
|
| AK | Designated contracting states |
Kind code of ref document: B1 Designated state(s): DE IT SE |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SE Effective date: 19900718 |
|
| REF | Corresponds to: |
Ref document number: 3578753 Country of ref document: DE Date of ref document: 19900823 |
|
| ITF | It: translation for a ep patent filed | ||
| PLBE | No opposition filed within time limit |
Free format text: ORIGINAL CODE: 0009261 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: NO OPPOSITION FILED WITHIN TIME LIMIT |
|
| 26N | No opposition filed | ||
| ITTA | It: last paid annual fee | ||
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: DE Payment date: 20021211 Year of fee payment: 18 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: DE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20040701 |