CN212812776U - 一种自走式莲藕收获作业船 - Google Patents
一种自走式莲藕收获作业船 Download PDFInfo
- Publication number
- CN212812776U CN212812776U CN202021484722.6U CN202021484722U CN212812776U CN 212812776 U CN212812776 U CN 212812776U CN 202021484722 U CN202021484722 U CN 202021484722U CN 212812776 U CN212812776 U CN 212812776U
- Authority
- CN
- China
- Prior art keywords
- lotus root
- hydraulic
- hull
- ship body
- hydraulic oil
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images




Landscapes
- Harvesting Machines For Root Crops (AREA)
Abstract
本实用新型公开了一种自走式莲藕收获作业船,船体用于承载挖掘机构和各种工作装置;行走装置包括明轮和三角履带,分别用于在水面和陆地行走和提供动力,三角履带使船体在路面上行走,方便上下田埂,明轮用于在水中辅助船体前进和停止,抓斗采用反铲镂空抓斗,用于挖掘并过滤泥土。船体内有完善的液压系统,液压驱动挖藕船上各执行机构上的液压缸进行作业;工作时,液压油缸插入泥面,抓斗将莲藕采出放在挖掘工作后的水面上。本实用新型设置了一种挖掘机构与船体结合的莲藕收获作业船,是一种切实可行的莲藕收获作业船,能适应多种田间条件作业,高效将莲藕采出。
Description
技术领域
本实用新型涉及农业机械中的挖藕机技术领域,具体涉及一种基于挖掘机的自走式莲藕收获作业船,主要用于对莲藕实现收获。
背景技术
莲藕是一种水生经济作物,用途广泛,可以食用、药用和观赏等,是一种易种难收的重要水生蔬菜和特色农产品,一直深受人们喜爱,在多个省份广泛种植,种植面积达400万多hm2,经济价值可观。但我国目前对莲藕的挖掘主要靠人力劳动,人在挖掘过程中消耗体力过大,不能及时将藕挖出,每年都有大量莲藕烂在田里,经济损失较大。
莲藕生长在水下深淤泥中,长期以来主要由人工用藕锨等工具挖出藕田表层淤泥,采挖莲藕前需要将藕田中的水排干,挖掘过程中需要持续弯腰操作,经验不丰富的藕农挖掘易损伤莲藕,采挖劳动强度大,作业条件恶劣,效率低下。虽然藕农现在利用高压水枪协助人工挖藕,降低了莲藕损伤率,提高了莲藕商品质量,但仍需持续弯腰操作,挖掘效率低,劳动强度大等问题依然存在,莲藕的收获环节已成为制约莲藕生产发展的瓶颈问题。
目前市场上已经出现多种挖藕机,其中,浮筒式挖掘机以浮筒为底盘,结合汽油机水泵、管路、高压喷嘴进行纯水力冲刷,虽然结构轻便,但存在一定的局限性,在黏性土壤中挖藕效果不理想;大型大功率挖藕机功率消耗率极大,虽然提高了冲刷幅宽,但仍需要人工下田将莲藕捞出,作业条件仍未改善。相比水力冲刷式挖藕机,该挖藕机更能提高挖藕机挖藕效率,能有效改善南方黏性土壤环境下挖藕难问题,相比大型大功率挖藕机,该挖藕机安装方便,适用多种田间条件。
因此,本领域技术人员致力于设计出一种,基于挖掘机的莲藕收获作业船,改善了挖藕机在田间难以实现自走的问题,解决了靠纯水力冲刷难以实现挖藕的困难,提高挖藕效率和挖净率。
实用新型内容
现有技术中存在的主要问题包括:(1)自走能力弱;(2)不能完全实现挖藕;(3)挖净率低(4)仍需多人下田协助作业;(5)挖掘机作业时影响船体在水面的稳定。
针对现有技术中存在的上述问题,本实用新型的目的在于提供一种自走式莲藕收获作业船,作业灵活,安装方便,挖净率高,能适应多种田间条件的挖藕设备。
为实现上述目的,本实用新型所采取的技术手段是:一种自走式莲藕收获作业船,包括船体,该船体内装有柴油机,所述船体两侧分别对称布置受传动机构驱动的明轮,传动机构由柴油机提供动力,所述船体内还装有液压控制箱,所述船体中部安装可转动的液压回转马达,液压回转马达上部安装可伸展的机械臂,机械臂的另一端安装反铲斗,机械臂上安装有驱动机械臂及反铲斗动作的液压油缸一,所述船体两侧还分别对称布置受传动机构驱动的三角履带,三角履带的底部不低于明轮的底部,所述船体内四角各布置有液压油缸二,所述液压油缸二的活塞杆能从船体底部伸出插入泥土,所述液压回转马达、液压油缸二、液压油缸一均通过液压油管连接液压控制箱,柴油机为液压控制箱提供维持液压油管压力所需的动力。
优选地,所述传动机构为液压马达,所述船体两侧对称布置液压马达,液压马达均通过液压油管连接液压控制箱,所述船体两侧分别布置的传动轴,传动轴两端与明轮、液压回转马达分别连接
优选地,所述三角履带包括主动轮、从动轮、履带、主动轮支座,所述主动轮支座套装在传动轴外周,通过轴承与传动轴转动连接,所述主动轮套装在传动轴外周,通过平键与传动轴连接,主动轮还通过另一个轴承与主动轮支座转动连接,主动轮支座下方安装可旋转的从动轮,履带缠绕与主动轮和从动轮的外周。
本实用新型的工作原理可为:由一个操作者操作控制平台将船体从机库以比较高的速度开到田间岸边,调整相应参数,再将自走式挖藕船缓慢驶入藕田。当船体前进到半泥半水路况,船体自身浮力让三角履带和泥面接触力减小,当船体进入比较深的工况时,由明轮推动船体前进。当船体稳定时,操作者通过控制各液压缸,让挖掘液压支撑装置插入泥土里固定船体,再利用抓斗进行莲藕挖掘,将泥土过滤,若仍有大量泥土掺杂也可控制液压缸抖动抓斗使泥土掉落,随后将莲藕放在水面上。
本实用新型的有益效果是:本设备和目前市场上的挖藕机相比,能够实现自走,方便单人操作,改变了靠水力冲刷挖藕效率低下并且需要人工打捞莲藕的现状,也改善了机械式采藕功率消耗大、适应性差的问题。通过微型挖掘机构和船体结合,利用完整的液压系统,采用反铲斗式的末端执行器,将莲藕从田间采出,并将泥土进行过滤,大幅提高了挖净率和挖藕效率。仅需一人完全坐在自走式挖藕船上操作运行,无需人体接触水面,操作者通过控制控制平台实现船体移动和挖藕作业,降低了农民的劳动强度。相比目前市场上现有的挖藕机,解决了仍需人体下水的现状,改善了作业环境,相比目前市场上现有的挖藕机,解决了仍需人体下水的现状,改善了作业环境,作业灵活,能适应干田和水田多种水深作业环境,解决了莲藕采挖困难导致莲藕烂在田里的问题。
附图说明
下面结合视图和实施对本实用新型做详细的描述。
图1为莲藕收获作业船的总体结构图。
图2为本实用新型的船体结构示意图;
图3为本实用新型的莲藕行走装置示意图;
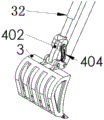
图4为本实用新型的反铲斗结构示意图;
图5为本实用新型的莲藕收获作业船的三角履带结构示意图;
图中:2-船体、102-传动轴、201-液压支撑装置、1-液压马达、4-明轮、8-三角履带、32-液压缸一、402-杆件、3-反铲斗、404-铰接架
具体实施方式
为了使本发明的技术优点更加清楚明了,结合以下实例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实例仅用以解释本发明,并不用于限定本发明。
如图1,一种基于挖掘机的莲藕收获作业船,包括船体2,船体2内装有柴油机7,船体2两侧分别对称布置受传动机构驱动的明轮4,传动机构由柴油机7提供动力,本实施例中传动机构为液压马达1,船体2内还装有液压控制箱6,船体2两侧对称布置液压马达1,船体2中部安装可转动的液压回转马达5,通过液压控制箱6可控制两侧的液压马达5驱动明轮4达到不同的转速,实现船体2转向,液压控制箱6还控制安装在船体2内的液压回转马达5转动,液压回转马达5上部连接机械臂31的一端,机械臂31的另一端安装反铲斗3,机械臂31安装有受液压控制箱6控制的液压油缸一32,实现机械臂31的伸展或收拢。
如图2,船体,是整个莲藕收获作业船的载体,船体2两侧分别布置的传动轴102,传动轴102两端与明轮4、液压回转马达5进行连接,如图4,液压马达1通过传动轴102带动明轮4,控制行走。传动轴102上还套装有如图1和图5所示的三角履带8,三角履带包括主动轮81、从动轮82、履带83、主动轮支座84,主动轮支座84套装在传动轴102外周,通过轴承与传动轴102转动连接,主动轮81套装在传动轴102外周,通过平键与传动轴102连接,主动轮81还通过另一个轴承与主动轮支座84转动连接,主动轮支座84下方安装可旋转的从动轮82,履带83缠绕与主动轮81和从动轮82的外周。三角履带8的底部不低于明轮4的底部,使船体2能两栖作业。
如图2,船体2内四角各布置有液压油缸二9,液压油缸二9的活塞杆能从船体2底部伸出,液压油缸二9通过液压油管连接液压控制箱6,液压油缸二9用于船体2在水田进行挖掘工作时插入泥土里,固定船体2。
莲藕收获作业船的作业流程如下:将船体2放置在田间岸边,控制液压控制箱5启动明轮302和三角履带303。当船体稳定时,操作者通过控制各液压缸,让挖掘液压支撑装置8插入泥土里固定船体,再利用反铲斗3进行莲藕挖掘,将泥土过滤,若仍有大量泥土掺杂也可控制液压缸抖动抓斗使泥土掉落,随后将莲藕放在水面上。控制液压操纵杆,实现船体2移动,利用反铲斗3将莲藕挖掘出并过滤莲藕上的泥土。仅需要一个人操作即可,可适应多种田间条件。
以上所述本实用新型的具体实施方式,并不构成对本实用新型保护范围的限定。任何根据本实用新型的技术构思所做出的各种其他相应的改变与变形,均应包含在本实用新型权利要求的保护范围内。
Claims (3)
1.一种自走式莲藕收获作业船,包括船体,其特征在于:该船体内装有柴油机,所述船体两侧分别对称布置受传动机构驱动的明轮,传动机构由柴油机提供动力,所述船体内还装有液压控制箱,所述船体中部安装可转动的液压回转马达,液压回转马达上部安装可伸展的机械臂,机械臂的另一端安装反铲斗,机械臂上安装有驱动机械臂及反铲斗动作的液压油缸一,所述船体两侧还分别对称布置受传动机构驱动的三角履带,三角履带的底部不低于明轮的底部,所述船体内四角各布置有液压油缸二,所述液压油缸二的活塞杆能从船体底部伸出插入泥土,所述液压回转马达、液压油缸二、液压油缸一均通过液压油管连接液压控制箱,柴油机为液压控制箱提供维持液压油管压力所需的动力。
2.根据权利要求1所述的一种自走式莲藕收获作业船,其特征在于:所述传动机构为液压马达,所述船体两侧对称布置液压马达,液压马达均通过液压油管连接液压控制箱,所述船体两侧分别布置传动轴,传动轴两端与明轮、液压回转马达分别连接。
3.根据权利要求2所述的一种自走式莲藕收获作业船,其特征在于:所述三角履带包括主动轮、从动轮、履带、主动轮支座,所述主动轮支座套装在传动轴外周,通过轴承与传动轴转动连接,所述主动轮套装在传动轴外周,通过平键与传动轴连接,主动轮还通过另一个轴承与主动轮支座转动连接,主动轮支座下方安装可旋转的从动轮,履带缠绕于主动轮和从动轮的外周。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202021484722.6U CN212812776U (zh) | 2020-07-24 | 2020-07-24 | 一种自走式莲藕收获作业船 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202021484722.6U CN212812776U (zh) | 2020-07-24 | 2020-07-24 | 一种自走式莲藕收获作业船 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| CN212812776U true CN212812776U (zh) | 2021-03-30 |
Family
ID=75122142
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN202021484722.6U Active CN212812776U (zh) | 2020-07-24 | 2020-07-24 | 一种自走式莲藕收获作业船 |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN212812776U (zh) |
-
2020
- 2020-07-24 CN CN202021484722.6U patent/CN212812776U/zh active Active
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN103636457B (zh) | 树木移栽机 | |
| CN201700152U (zh) | 一种山药种植收获一体机 | |
| CN105484306A (zh) | 两栖式清淤机 | |
| CN203675617U (zh) | 船式自动挖藕机 | |
| CN210900381U (zh) | 悬挂一体式山药挖掘机 | |
| CN206294522U (zh) | 自走式大姜收获机 | |
| CN212812776U (zh) | 一种自走式莲藕收获作业船 | |
| CN1554833A (zh) | 履带式水下生态精确薄层清淤机 | |
| CN212812775U (zh) | 一种基于挖掘机的莲藕收获作业船 | |
| CN205314147U (zh) | 两栖式清淤机 | |
| CN102493514A (zh) | 自行搅拌式河道清淤设备 | |
| JP2928768B2 (ja) | 蓮根掘り機 | |
| CN201485890U (zh) | 一种牵引式链条挖沟机 | |
| CN100488349C (zh) | 可随时左右液压助调并由液压马达传动式中耕机 | |
| CN206294527U (zh) | 新型大姜收获机 | |
| CN108702915A (zh) | 一种自走可转向式挖藕机 | |
| CN202380506U (zh) | 自行搅拌式河道清淤设备 | |
| CN203661563U (zh) | 农用履带式开沟机 | |
| CN208956447U (zh) | 一种自走可转向式挖藕机 | |
| CN105165221A (zh) | 一种山药开沟收获机 | |
| CN201630008U (zh) | 船式液压挖藕机 | |
| CN208072499U (zh) | 一种农田水利施工开槽设备 | |
| CN2742039Y (zh) | 水旱两用开挖清淤机械 | |
| CN217136028U (zh) | 适应于多种地形的辅助种树挖坑机 | |
| CN216775500U (zh) | 一种旱田用莲藕采收机 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| GR01 | Patent grant | ||
| GR01 | Patent grant |