CN212631103U - 一种床架及护理床 - Google Patents
一种床架及护理床 Download PDFInfo
- Publication number
- CN212631103U CN212631103U CN202020804277.0U CN202020804277U CN212631103U CN 212631103 U CN212631103 U CN 212631103U CN 202020804277 U CN202020804277 U CN 202020804277U CN 212631103 U CN212631103 U CN 212631103U
- Authority
- CN
- China
- Prior art keywords
- frame
- bed
- action
- assembly
- motor
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images






Landscapes
- Invalid Beds And Related Equipment (AREA)
Abstract
一种床架及护理床,属于医用器械领域。床架包括架体和动作机构。其中,架体包括对置的底架和顶架。动作机构连接于底架和顶架之间,且包括能够分别独立动作的第一动作组件、第二动作组件、第三动作组件、第四动作组件。其中,第一动作组件和第三动作组件相互配合以驱动顶架相对底架可选地前倾、后倾、上升或下降。第二动作组件在后端结构处提供独立于顶架的可选的顶升操作和下拉操作。第四动作组件在前端结构处提供独立于顶架的可选的顶升操作和下拉操作。该床架具有相对较高的灵活度,可以根据使用所需而做出不同的姿态调整。
Description
技术领域
本申请涉及医用器械领域,具体而言,涉及一种床架及护理床。
背景技术
目前,市场上的护理床结构相对比较普通,仅有简单前、后升降功能。然而,现有的护理床已经越来越无法满足不同病患对其的多种功能需求。
有鉴于此,亟待一种新的护理床。
实用新型内容
为了对满足更多病患对于护理床的多样化功能的需求,本申请提出了一种床架及护理床。
本申请是这样实现的:
一种床架包括:
架体,包括对置的底架和顶架,顶架具有对应于人体上身的前端结构和对应于人体下身的后端结构。
动作机构,连接于底架和顶架之间,动作机构包括能够分别独立动作的第一动作组件、第二动作组件、第三动作组件和第四动作组件。
第一动作组件和第三动作组件相互配合以驱动顶架相对底架可选地前倾、后倾、上升或下降。第二动作组件在后端结构处提供独立于顶架的可选的顶升操作和下拉操作。第四动作组件在前端结构处提供独立于顶架的可选的顶升操作和下拉操作。
以上床架,具有动作机构,可以根据不同的需要做出不同的动作。例如,该动作机构包括四个能够独立运动的动作组件(第一动作组件、第二动作组件、第三动作组件和第四动作组件)。前述的四个动作组件可以分别独立运动,因此其既可以独立运动也可以协同配合进行运动,从而可以实现床架多种姿态调整。例如,床架整体高度变化,即床的升降操作。例如,床架的整体倾斜(前倾和后倾)。例如,床架局部的顶升和下拉。
由此,床架整体上的灵活度大大提高,可以做出多种姿态且能够在各种姿态之间按需调整。因此,当运动不便的病患躺在基于该床架制作的床时,可以通过床架的控制使病患做出不同的动作,起到锻炼、方便活动的效果。
结合第一方面,在本申请的第一方面的第一种可能的实施方式中,第一动作组件、第二动作组件、第三动作组件和第四动作组件分别通过连杆和电机提供驱动。
结合第一方面的第一种实施方式,在本申请的第一方面的第二种可能的实施方中,顶架在前端结构和后端结构之间设置第一固定杆。第一动作组件包括相互匹配的第一电机、第一连杆和第一转动架;第一电机固定连接于第一固定杆,第一电机固定连接并驱动第一连杆,第一转动架分别与底架和第一连杆转动连接。
结合第一方面的第二种实施方式,在本申请的第一方面的第三种可能的实施方中,前端结构包括固定臂和转动臂;第二动作组件包括相互匹配的第二电机、第二连杆;第二电机固定连接于固定臂,并固定连接和驱动第二连杆,第二连杆还与转动臂转动连接,转动臂连接撑杆。
结合第一方面的第二种或第三种实施方式,在本申请的第一方面的第四种可能的实施方中,第三动作组件包括相互匹配的第三电机、第三连杆和第三转动架;第三电机固定连接于第一固定杆,第三电机固定连接并驱动第三连杆,第三转动架分别与底架和第三连杆转动连接。
结合第一方面的第四种实施方式,在本申请的第一方面的第五种可能的实施方中,后端结构包括第二固定杆和第三固定杆;第四动作组件相互匹配的第四电机、第四连杆和转动架组,转动架组包括第一架体、第二架体以及第三架体;其中,第一架体具有第一端、第二端和位于第一端和第二端之间具有滑动段,第一端、第二端分别以可脱离方式卡接于第二固定杆和第三固定杆,且第一端通过二连杆结构与滑动段连接;第二架体的两端分别与第一端、第三固定杆转动连接;第四电机固定连接于第一固定杆,第四电机还固定连接并驱动第四连杆,第四连杆还与第二连杆的转轴转动连接。
针对上述四个动作组件,选择电机和连杆配合的结构实施,可以在一定程度上简化床架的结构,提高其运动的灵活性、稳定性。并且,电机和连杆结构的配合,并通过共用多个结构而有助于提高整体结构的集成度和传动的稳定、可控。
结合第一方面,在本申请的第一方面的第六种可能的实施方式中,床架在前端结构处设置控制总成,且控制总成分别对第一动作组件、第二动作组件、第三动作组件、第四动作组件进行控制。
将动作机构的控制以控制总成实现,可以提高可操作性和便利性,有利于病患使用。尤其在本申请实例中的床架具有相对较高的灵活度的情况下,设置控制总成便于集中控制和管理。
在第二方面,本申请实施例提供了一种护理床,其包括床架、防护结构以及床板。
其中,防护结构连接于床架的周缘;床板,连接与床架。
结合第二方面,在本申请的第二方面的第一种可能的实施方式中,防护结构包括:床头挡板、床尾挡板、两侧护栏。其中,两侧护栏通过滑轨以可升降的方式连接于床架。
两侧护栏以可升降的方式设计,方便于病患上下床,使其上下床的运动幅度更小,减小潜在的大幅度运动危险。
结合第二方面的第一种实施方式,在本申请的第二方面的第二种可能的实施方中,床板包括:
背部床面,受第二动作组件驱动;
铰接以实现联动的大腿床面和小腿床面,受第四动作组件驱动。
通过设置受动作机构具体的相应床面,可以根据床面的布局而实现对病患的身体的局部的驱动,使长期卧床的病患可以进行适当的锻炼。
附图说明
为了更清楚地说明本申请实施例的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,应当理解,以下附图仅示出了本申请的某些实施例,因此不应被看作是对范围的限定,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他相关的附图。
图1为本申请实施例提供的床架的结构示意图;
图2示出了图1所示床架另一视角的结构示意图;
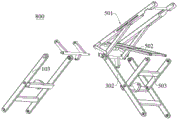
图3示出了图1所示床架中的动作机构的结构示意图;
图4示出了图3所示床架中的动作机构的位于前端结构中转动配合结构示意图;
图5示出了图3所示床架中的动作机构的位于后端结构中转动配合结构示意图;
图6为本申请实施例提供的护理床的结构示意图;
图7示出了图6所示护理床的另一姿态的结构示意图;
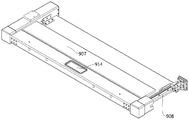
图8示出了图6所示护理床中的滑轨与两侧护栏的配合结构示意图。
图标:101-第一电机;102-第一连杆;103-第一转动架;1000-第一固定杆;1001-固定臂;1002-转动臂;1003-第二固定杆;1004-第三固定杆;201-第二电机;202-第二连杆;203-撑杆;300-第三电机;301-第三连杆;302-第三转动架;400-第四电机;401-第四连杆;402-转动架组;501-第一架体;5011-第一端;5012-第二端;5013-滑动段;5014-二连杆结构;5015-转轴;502-第二架体;503-支撑臂;800-动作机构;801-架本体;802-床架;900-支撑件;901-顶架;902-底架;903-床头挡板;904-床尾挡板;905-控制总成;906-滚轮结构;907-两侧护栏;908-滑轨;909-急停装置;910-背部床面;911-臀部床面;912-大腿床面;913-小腿床面;914-控制扳手。
具体实施方式
长期卧床的病患,其身体会因为长期不运动而对其健康产生巨大的不利影响。因此,在其卧床期间,能够适当地运动身体的各个部位,有助于其病愈后的身体机能快速恢复。此外,由于病患运动受限,病床会限制或影响其运动。
就发明人所知,市场上现有护理床的功能比较单一。例如,市面上的普通护理床,仅具有简单的背部抬起的功能。因此,现有的护理床,不足以满足病患的上述所需。
因此,基于这样的现实状况,发明人经过研究提出了一种新的护理床(参阅图6和图7),其能够提供更高自由度的调节功能,从而能够使病患活动增加和减小其活动难度,且还便于陪护人员对其进行照顾。
从能够上而言,该护理床可以提供下述任意的一种功能。
1、护理床可以升高、下降,从而可以为不同身高和体格的病患和陪护人员根据需要调整高度提供可能,以便病患上下床等。
2、护理床可以提供前倾功能、后倾功能。通过控制护理床进行前倾或后倾,可以相应地使病患俯身或后仰。
3、护理床可以局部动作,使病患上半身被撑起或者下半身被撑起或大小腿弯曲和伸直。
4、通过对其结构调整,护理床还可以提供其他一些功能,例如,急停。即,护理床在运动过程中快速停止运动,等等。这可以有效地防止不利的意外情况发生,从而改善使用的安全性。
应当指出的是,虽然在本文中,是以护理床为例进行说明,但是基于其结构设计,护理床的多自由度实现方式也可以被用以在其他产品或领域中,以作为多功能化的设备使用。
对于前述的护理床而言,参阅图1、图2、图3、图4和图5,其结构主要包括一个多功能的床架802,护理床的多姿态调整主要通过该床架802实现。因此,前述的多功能化的设备相应可以通过对该床架802进行相应结构调整和适用而得以实施。
参阅图1和图3,床架802包括架本体801和动作机构800。其中,架本体801为床架802提供整体的结构框架,并且提供动作机构800安装、执行操作的位置和空间。
在此基础之上,护理床可以通过在床架802上安装防护结构和床板而实施。其中,防护结构连接于床架802的周缘,床板连接于床架802之上。防护结构将床架802四周限制,从而形成围合结构,可以防止病患从床架802跌落。床板则用以支撑病患身体,便于其躺卧。
其中,参阅图6,防护结构包括床头挡板903、床尾挡板904、两侧护栏907。两侧护栏907分别安装在床架802,主要是顶架901的左右两侧。在一些改进的实例中,床头挡板903、床尾挡板904、两侧护栏907可以被构造为能够被操作,以实现如翻转、升降,从而方便于使用。
一种实例中,床尾挡板904可以翻转,从而使床尾无阻挡,便于病患上下床。或者,另一些实例中,两侧护栏907可以翻转和升降,从而允许病患更自由地上下床。上述功能可以通过使挡板、护栏通过铰接方式结合在顶架901实现;或者,通过在顶架901设置导轨,挡板、护栏可滑动地与导轨配合实现。在本申请实例中,床头挡板903、床尾挡板904选择固定连接于顶架901,而两侧护栏907则通过滑轨908(参阅图8)以可升降的方式连接于床架802的顶架901或底架902。滑轨908与两侧护栏907可以通过齿轮和齿条的配合驱动;或者通过使用直线电机驱动;或者通过丝杠滑块配合驱动。相应地,两侧护栏907设置有控制扳手914,以便调整两侧护栏907的升降。
结合动作机构800的结构设计,可以将床板对应于身体的不同部位而区分为不同的结构。例如,床板包括背部床面910和大腿床面912、小腿床面913、臀部床面911等等。因此,结合床架的功能,背部床面910可以独立于大腿床面912和小腿床面913运动,从而通过其被顶升而实现病患起背的效果。相应地,大腿床面912和小腿床面913则可以独立于背部床面910进行联动(如通过销钉可转动连接),从而实现病患曲腿的效果。
以下就示例中的床架802结合附图进行详述。
架本体801
参阅图1至图5,架本体801包括顶架901和底架902,且两者相对布置。底架902是支撑于地面的部分,顶架901通过动作机构800于底架902连接,并通过动作机构800进行相应的动作(升、降、前倾或后倾)。
底架902大致为四边的框架结构,具有两个相对的底部长边和两个相对的底部短边。为了方便进行移动,底架902的四角可以选择安装滚轮结构906,如万向轮,以便进行包括转向等移动操作。或者,在其它实例中,滚轮结构906还可以配置锁定结构,以便在不需要床架802移动时,使其保持在原位置。
进一步地,在底架902的四角还可以安装支撑件900,以提供架本体801的整体稳定性。当架本体801执行升高动作时,可以提高减小缓动并且还能够提供抗侧翻性能。作为一种可替代的示例,支撑架可以被构造为“人”字型结构。其与地面接触时能够提供多个支撑点,从而提供足够的支撑力。
与底架902相适应地,顶架901也具有大致类似的结构。实例中,顶架901为四边的框架结构,并且也包括两个相对的顶部长边和两个相对的顶部短边。此外,基于便于描述的需求,顶架901可以定义对应于人体上身的前端结构和对应于人体下身的后端结构。
顶架901的四边中,两个顶部短边分别对应于护理床的床头(前部)和床尾(后部);两个顶部长边则分别对应于护理床的两侧(如左侧和右侧)。因此,当护理床升高或下降以调节其高度时,是指通过顶架901相对于底架902的升高和下降。护理床的前倾,则对应于,床头相对于底架902升高,且同步地,床尾相对于底架902下降。与之相似地,护理床的后倾,则对应于,床头相对于底架902下降,且同步地,床尾相对于底架902升高。
顶架901在前端结构和后端结构之间的顶部长边上设置有第一固定杆1000,其可以对应于人体臀部。相应地,用以支撑臀部的臀部床面911可以平铺固定于该第一固定杆1000。第一固定杆1000与顶架901固定连接,并且两者同步运动。
动作机构800
参阅图1、图3,动作机构800是床架802根据操作而执行相应动作的动力来源,其驱动了顶架901的上升、下降、前倾和后倾。且同时,动作机构800还实现了局部的动作,用以对应地使病患背部撑起(起背)、曲腿。
动作机构800可以根据不同的设计而具有不同的实施结构。
例如,一些实例中,顶架901和底架902通过升降机构(如气缸或液压缸)进行连接,且连接位置位于顶部长边和底部长边。由此,当升降机构同步上升时可以使顶架901相对于底架902升高;当升降机构同步下降时可以使顶架901相对于底架902降低。当部分升降结构同步上升,而另一部分升降结构同步下降时,可以使顶架901相对于底架902前倾或后倾。或者,在另一些实例中,还可以通过齿轮机构或滑轮组机构和前述的升降机构的配合实现前述的动作。
在本申请的另一些实例中,动作机构800通过电机和连杆配合驱动。其中,动作机构800包括能够分别独立动作的第一动作组件、第二动作组件、第三动作组件和第四动作组件。换言之,四个动作组件可以独立地动作,也可以任意地选择其中的一个与其它的一个或多个配合工作。
例如,第一动作组件和第三动作组件相互配合,两者同步动作以驱动顶架901相对底架902可选地前倾、后倾、上升或下降。
在前端结构处,第二动作组件提供独立于顶架901的可选的顶升操作和下拉操作。在后端结构处,第四动作组件提供独立于顶架901的可选的顶升操作和下拉操作。换言之,在顶架901相对于底架902运动时,前述顶升操作和下拉操作可以与之同时实施。或者,顶升操作和下拉操作是在前述的前后倾和升降动作之前或之后实施。
由此,病患可以在被顶架901支撑而前倾或后倾的同时,还可以同时实现曲腿、起背动作。且对于顶架901的升降操作,也可以同时实现曲腿、起背动作。
此外,基于方便操作和控制考虑,床架802的顶架901上安装有控制总成905,从而将各个运动组件的对应控制装置实现集中化管理。
进一步地,顶架901还可以安装急停装置909,用以与控制总成905配合。当动作机构800出现故障时,可以通过急停装置909使其停止运动。急停装置909可以配套安装控制面板,以便对各个运动组件单独控制。或者,控制总成905可以配备蓄电池,以备停电使用。
以下,将就本申请实例的动作机构800中的各个组件的实现方式进行详述。
参阅图2、图3、图4和图5,其中,第一动作组件包括相互匹配的第一电机101、第一连杆102和第一转动架103。第一电机101固定连接在第一固定杆1000。第一连杆102的一端固定连接于第一电机101的输出轴。第一转动架103分别与底架902和第一连杆102转动连接。第一转动架103的两端分别于底架902和顶架901转动连接,且与顶架901是在后端部分连接。
由于,第一固定杆1000与床架802的顶架901的两个长边固定连接,因此,两者同步运动。第一动作组件在执行动作时,第一电机101可以驱动第一连杆102伸缩运动,从而驱动第一转动架103运动,使顶架901的后端结构运动(上升或下降)。例如,当第一连杆102伸长时,其产生朝向底架902的下压/下拉动作,从而使顶架901的后端结构向靠近底架902的方向运动,从而产生下降的动作。当第一连杆102缩短时,其产生背向底架902的上抬/顶升动作,从而使顶架901的后端结构向远离底架902的方向运动,从而产生上升的动作。
进一步地,床架802中顶架901的前端结构包括固定臂1001和转动臂1002。其中,固定臂1001固定连接在顶架901的两个长边之间,而转动臂1002则可转动地连接在顶架901的两个长边之间。由此,固定臂1001与顶架901同步升降、前后倾运动,而转动臂1002则可以相对于顶架901的两个长边转动。
与之相适应地,参阅图2、图3、图4和图5,第二动作组件包括相互匹配的第二电机201、第二连杆202。其中,第二电机201固定连接于固定臂1001,且同时与第二连杆202固定连接。第二连杆202则与转动臂1002转动连接,且转动臂1002连接撑杆203。撑杆203还连接在大腿床面912和小腿床面913的铰接处,因此,撑杆203的顶升动作和下拉动作可以使大腿床面912和小腿床面913相对转动或恢复为平整表面,从而可以使病患伸直腿或曲腿。
由此,第二电机201操作第二连杆202伸缩实现驱动转动臂1002转动,从而使撑杆203相应转动。其中,当第二连杆202伸长时,转动臂1002转动使撑杆203朝向底架902转动,从而使与该撑杆203连接的大腿床面912和小腿床面913弯曲,从而实现曲腿动作。当第二连杆202伸长时,转动臂1002转动使撑杆203朝向底架902转动,从而使与该撑杆203连接的大腿床面912和小腿床面913相对平整(位于同一平面),从而实现伸腿动作(大腿和小腿伸直)。当第二连杆202缩短时,转动臂1002相对于前述反向转动使撑杆203远离底架902转动,从而使与该撑杆203连接的大腿床面912和小腿床面913在彼此的铰接处作相对转动,从而实现曲腿。
参阅图2、图3、图4和图5,第三动作组件包括相互匹配的第三电机300、第三连杆301、第三转动架302和支撑臂503。支撑臂503两端分别与第三固定杆1004、第三转动架302转动连接。
其中,第三电机300连接于第一固定杆1000,且第三电机300还固定连接第三连杆301。第三转动架302分别与底架902和第三连杆301转动连接。第三转动架302的两端分别与顶架901和底架902转动连接,且顶架901是在前端结构部分连接。
其中,第三电机300固定连接于顶架901,因此,第三电机300与顶架901同步运动。第三电机300操作第三连杆301,使第三转动架302进行动作,从而控制顶架901的运动。例如,当第三连杆301伸长时,其产生朝向底架902的下压动作,从而使顶架901的前端结构向靠近底架902的方向运动,从而产生下降的动作。当第三连杆301缩短时,支撑臂503产生背向底架902的上抬动作,从而使顶架901的后端结构向远离底架902的方向运动,从而产生上升的动作。
基于此,第一动作组件和第二动作组件可以同步工作,从而使顶架901整体相对于底架902平稳地下降或上升,或者前倾和后倾。例如,第一动作组件使顶架901的后端结构下降,第三动作组件使顶架901的前端结构下降,从而实现顶架901整体下降。第一动作组件使顶架901的后端结构上升,第三动作组件使顶架901的前端结构上升,从而实现顶架901整体上升。第一动作组件使顶架901的后端结构下降,第三动作组件使顶架901的前端结构上升,从而实现顶架901整体前倾。第一动作组件使顶架901的后端结构上升,第三动作组件使顶架901的前端结构下降,从而实现顶架901整体后倾。
参阅图2、图3、图4和图5,第四动作组件相互匹配的第四电机400、第四连杆401和转动架组402,且转动架组402包括第一架体501、第二架体502。
其中,第一架体501具有第一端5011、第二端5012和位于第一端5011和第二端5012之间具有滑动段5013。第一端5011、第二端5012均开设缺口,从而通过缺口分别以可脱离方式卡接于第二固定杆1003和第三固定杆1004。因此,第一架体501整体可以被抬升而从床架802的顶架901上脱离。同时,第一架体501的第一端5011还通过二连杆结构5014与滑动段5013连接。
第二架体502的两端分别与第一端5011、第三固定杆1004转动连接。
第四电机400连接于第一固定杆1000,第四电机400还固定连接第四连杆401,且第四连杆401还与二连杆的转轴5015转动连接。
由此,第四电机400操作第四连杆401,第四连杆401缩短使二连杆结构5014绕起转轴5015转动,从而通过二连杆在滑动段5013的运动而撑起第一架体501,使第一架体501的第一端5011和第二端5012从第二固定杆1003和第三固定杆1004脱离,产生起背动作。
需要说明的是,上述描述中,对于固定连接和转动连接的实现方式可以存在多种可选方案。例如固定连接可以使一体成型、焊接、铆接等等;例如转动连接可以是通过销轴、铰链连接、通过轴承连接等等。
基于上述结构和功能的设计,在一些实例中,床架802的高度可以控制在320毫米至720毫米之间的范围内调整。其前倾的调整角度可以达到0度至20度之间;其后倾的调整角度可以达到0度至12度之间。抬背/起背的调整角度可以达到0-70度,抬腿的调整角度可以实现0-35度。
并且,在上述规定范围内,床架802可以确保形态安全性和稳定,并且既能实整体联动变形也可以单独实现抬背,抬腿的变形。结构合理、稳定性好,能够实现轮椅的各种姿态的转换,方便病患使用。
以上所述仅为本申请的优选实施例而已,并不用于限制本申请,对于本领域的技术人员来说,本申请可以有各种更改和变化。凡在本申请的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本申请的保护范围之内。
Claims (10)
1.一种床架,其特征在于,包括:
架本体,包括对置的底架和顶架,所述顶架具有对应于人体上身的前端结构和对应于人体下身的后端结构;
动作机构,连接于所述底架和所述顶架之间,所述动作机构包括能够分别独立动作的第一动作组件、第二动作组件、第三动作组件和第四动作组件;
所述第一动作组件和所述第三动作组件相互配合以驱动所述顶架相对所述底架可选地前倾、后倾、上升或下降;
所述第二动作组件在所述后端结构处提供独立于所述顶架的可选的顶升操作和下拉操作;
所述第四动作组件在所述前端结构处提供独立于所述顶架的可选的顶升操作和下拉操作。
2.根据权利要求1所述的床架,其特征在于,所述第一动作组件、所述第二动作组件、所述第三动作组件和所述第四动作组件分别通过连杆和电机配合提供驱动。
3.根据权利要求2所述的床架,其特征在于,所述顶架在所述前端结构和所述后端结构之间设置第一固定杆;
所述第一动作组件包括相互匹配的第一电机、第一连杆和第一转动架;
所述第一电机固定连接于所述第一固定杆,所述第一电机固定连接并驱动所述第一连杆,所述第一转动架分别与所述底架和所述第一连杆转动连接。
4.根据权利要求3所述的床架,其特征在于,所述前端结构包括固定臂和转动臂;
所述第二动作组件包括相互匹配的第二电机、第二连杆;
所述第二电机固定连接于所述固定臂,且固定连接和驱动所述第二连杆,所述第二连杆还与所述转动臂转动连接,所述转动臂连接撑杆。
5.根据权利要求3或4所述的床架,其特征在于,所述后端结构包括第二固定杆和第三固定杆;
所述第三动作组件包括相互匹配的第三电机、第三连杆、第三转动架和支撑臂,所述支撑臂两端分别与所述第三固定杆、所述第三转动架转动连接;
所述第三电机固定连接于所述第一固定杆,所述第三电机固定连接并驱动所述第三连杆,所述第三转动架分别与所述底架和所述第三连杆转动连接。
6.根据权利要求5所述的床架,其特征在于,第二固定杆第三固定杆;
所述第四动作组件相互匹配的第四电机、第四连杆和转动架组,所述转动架组包括第一架体、第二架体;
其中,第一架体具有第一端、第二端和位于所述第一端和所述第二端之间具有滑动段,所述第一端、所述第二端分别以可脱离方式卡接于所述第二固定杆和所述第三固定杆,且所述第一端通过二连杆结构与所述滑动段连接;
所述第二架体的两端分别与所述第一端、第三固定杆转动连接;
所述第四电机固定连接于所述第一固定杆,所述第四电机还固定连接并驱动所述第四连杆,所述第四连杆还与所述二连杆的转轴转动连接。
7.根据权利要求1所述的床架,其特征在于,所述床架在所述前端结构处设置控制总成,且所述控制总成分别对第一动作组件、第二动作组件、第三动作组件、第四动作组件进行控制。
8.一种护理床,其特征在于,包括:
如权利要求1至7中任意一项所述的床架;
防护结构,连接于所述床架的周缘;
床板,连接于所述床架。
9.根据权利要求8所述的护理床,其特征在于,所述防护结构包括:床头挡板、床尾挡板、两侧护栏;
其中,所述两侧护栏通过滑轨以可升降的方式连接于所述床架。
10.根据权利要求8所述的护理床,其特征在于,所述床板包括:
背部床面,受所述第二动作组件驱动;
铰接以实现联动的大腿床面和小腿床面,受所述第四动作组件驱动。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202020804277.0U CN212631103U (zh) | 2020-05-13 | 2020-05-13 | 一种床架及护理床 |
| PCT/CN2021/092800 WO2021228041A1 (zh) | 2020-05-09 | 2021-05-10 | 床面板组件、护理床及其一键变椅的控制方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202020804277.0U CN212631103U (zh) | 2020-05-13 | 2020-05-13 | 一种床架及护理床 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| CN212631103U true CN212631103U (zh) | 2021-03-02 |
Family
ID=74792502
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN202020804277.0U Active CN212631103U (zh) | 2020-05-09 | 2020-05-13 | 一种床架及护理床 |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN212631103U (zh) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2021228041A1 (zh) * | 2020-05-09 | 2021-11-18 | 广东博方众济医疗科技有限公司 | 床面板组件、护理床及其一键变椅的控制方法 |
-
2020
- 2020-05-13 CN CN202020804277.0U patent/CN212631103U/zh active Active
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2021228041A1 (zh) * | 2020-05-09 | 2021-11-18 | 广东博方众济医疗科技有限公司 | 床面板组件、护理床及其一键变椅的控制方法 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN107773368A (zh) | 一种可调节式电动护理床 | |
| KR101317480B1 (ko) | 병원용 다기능 전동침대 | |
| CN110812036A (zh) | 一种可升降旋转医疗床 | |
| CN105287129A (zh) | 一种多功能医疗床 | |
| CN111249083A (zh) | 一种多功能护理床 | |
| CN107847381B (zh) | 电动床 | |
| CN113599113A (zh) | 一种可分离多功能护理床 | |
| CN110200758A (zh) | 一种具有护理功能的转运设备 | |
| CN212631103U (zh) | 一种床架及护理床 | |
| CN111658364A (zh) | 一种便于调整姿态的骨科护理床 | |
| CN210644395U (zh) | 一种医用康复椅与护理床结合式病人瘫痪康复装置 | |
| KR102381122B1 (ko) | 전후경사와 수직승강동작가능한 환자 침대용 승강조절장치 | |
| EP0705091B1 (en) | Intensive therapy bed | |
| CN112754802A (zh) | 一种可翻转角度的下肢步态康复训练病床 | |
| CN210612390U (zh) | 一种腿部高度可调的护理床 | |
| WO2017006928A1 (ja) | 電動ベッド | |
| CN210751148U (zh) | 一种上段位可调直立床 | |
| CN209004487U (zh) | 医疗床的可调节床面板及医疗床 | |
| CN216168406U (zh) | 一种滑动式腿部联动机构及病床 | |
| CN208823212U (zh) | 一种多功能折叠轮椅 | |
| CN217245265U (zh) | 一种护理床自延位腹部减压机构及多功能护理床 | |
| CN214713094U (zh) | 一种升降式可折叠轮椅 | |
| CN211433934U (zh) | 一种普外科手术用手术台 | |
| CN113041056A (zh) | 可坐立如厕的多功能护理床 | |
| CN208464483U (zh) | 一种护理床的翻身系统 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| GR01 | Patent grant | ||
| GR01 | Patent grant |