CN211014629U - 一种激光雷达装置 - Google Patents
一种激光雷达装置 Download PDFInfo
- Publication number
- CN211014629U CN211014629U CN201790001507.6U CN201790001507U CN211014629U CN 211014629 U CN211014629 U CN 211014629U CN 201790001507 U CN201790001507 U CN 201790001507U CN 211014629 U CN211014629 U CN 211014629U
- Authority
- CN
- China
- Prior art keywords
- lidar
- laser
- lidar apparatus
- eye
- pulse width
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images











Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S7/00—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00
- G01S7/48—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S17/00
- G01S7/481—Constructional features, e.g. arrangements of optical elements
- G01S7/4814—Constructional features, e.g. arrangements of optical elements of transmitters alone
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S17/00—Systems using the reflection or reradiation of electromagnetic waves other than radio waves, e.g. lidar systems
- G01S17/02—Systems using the reflection of electromagnetic waves other than radio waves
- G01S17/06—Systems determining position data of a target
- G01S17/08—Systems determining position data of a target for measuring distance only
- G01S17/10—Systems determining position data of a target for measuring distance only using transmission of interrupted, pulse-modulated waves
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S7/00—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00
- G01S7/48—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S17/00
- G01S7/481—Constructional features, e.g. arrangements of optical elements
- G01S7/4816—Constructional features, e.g. arrangements of optical elements of receivers alone
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S7/00—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00
- G01S7/48—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S17/00
- G01S7/483—Details of pulse systems
- G01S7/484—Transmitters
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S7/00—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00
- G01S7/48—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S17/00
- G01S7/483—Details of pulse systems
- G01S7/486—Receivers
- G01S7/4861—Circuits for detection, sampling, integration or read-out
- G01S7/4863—Detector arrays, e.g. charge-transfer gates
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S7/00—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00
- G01S7/48—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S17/00
- G01S7/483—Details of pulse systems
- G01S7/486—Receivers
- G01S7/4865—Time delay measurement, e.g. time-of-flight measurement, time of arrival measurement or determining the exact position of a peak
Landscapes
- Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- Computer Networks & Wireless Communication (AREA)
- General Physics & Mathematics (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Electromagnetism (AREA)
- Optical Radar Systems And Details Thereof (AREA)
- Measurement Of Optical Distance (AREA)
- Solid State Image Pick-Up Elements (AREA)
Abstract
描述了一种激光雷达装置。该装置包括用于发射激光脉冲的眼睛安全激光源。提供用于检测反射光子的SiPM检测器,且还提供光学器件。该眼睛安全激光源被配置成使得所发射的激光脉冲具有选择性地匹配到期望测距精度的宽度。
Description
技术领域
本实用新型涉及一种激光雷达装置。特别地但非排它地,本公开涉及一种包括眼睛安全激光源的激光雷达装置,该眼睛安全激光源被配置成使得发射的激光脉冲具有匹配到期望测距精度的宽度。
背景技术
硅光电倍增管(Silicon Photomultiplier,SiPM)为单光子敏感的、高性能的、固态传感器。该SiPM由具有集成的淬灭电阻器的密集排列的单光子雪崩光电二极管(SinglePhoton Avalanche Photodiode,SPAD)的总阵列形成,产生具有全部在大约30V的偏置电压下实现的高增益(大约1x 106)、高检测效率(>50%)和快速时序(子ns级上升时间)的紧凑型传感器。
典型的现有技术的ToF激光雷达系统使用脉冲或连续照射。连续照射使用连续时变信号,该连续时变信号可以被表示为正弦信号。为了检测目标的距离,需要获得该信号并确定输出信号和输入信号之间的任何相角偏移。然后使用该偏移计算从源到目标的距离。根据操作本身,需要检测正弦信号的峰值和真值(troth)。检测信号的峰值和真值二者的该需求浪费光子,这是因为在确定目标距离时并不使用所有检测到的光子。这需要在低反射率目标的长距离检测中使用高光学功率、潜在非眼睛安全信号源。
因此需要提供一种利用盖革模式检测器的激光雷达系统,该激光雷达系统解决了现有技术的至少一些缺点。
实用新型内容
因此,本公开涉及一种激光雷达装置,所述激光雷达装置包括:
用于发射激光脉冲的眼睛安全激光源;
用于检测反射光子的盖革模式检测器;以及
光学器件;
其中,所述眼睛安全激光源被配置成使得发射的所述激光脉冲具有选择性地匹配到期望测距精度的宽度。
在一个方面中,所述激光脉冲的平均功率被固定以满足眼睛安全限制。
在另一方面中,所述眼睛安全激光源配置成改变所述脉冲宽度,从而达到预定平均功率。
在另一方面中,所述眼睛安全激光源配置成通过减小所述激光脉冲的所述脉冲宽度而应用具有相同的所述预定平均功率的更高激光峰值功率。
在另一方面中,所述眼睛安全激光源配置成通过增大所述激光脉冲的所述脉冲宽度而应用具有相同的所述预定平均功率的更低激光峰值功率。
在示例性方面中,使用如下公式计算所述激光峰值功率:

其中:
Pavg为激光脉冲的所述平均功率;
Tpw为所述脉冲宽度;以及
PRR为重复率。
在另一方面中,所述眼睛安全激光源被配置成使得发射的所述激光脉冲具有匹配到期望检测分辨率的宽度,从而检测的每个发射光子有助于所述期望测距精度。
在另一方面中,使用如下公式从所述期望测距精度计算所需脉冲宽度:

其中:
Δd为所述期望测距精度;
c为光速;以及
t为所需激光脉冲宽度。
在另一方面中,对于10cm的期望测距精度,所述激光脉冲宽度被设为667皮秒。
在一个方面中,所述盖革模式检测器为单光子传感器。
在另一方面中,所述盖革模式检测器由单光子雪崩光电二极管(SPAD)传感器的总阵列形成。
在示例性布置中,提供控制器,所述控制器能够与所述眼睛安全激光器协作,用以控制所述眼睛安全激光器,使得发射的所述激光脉冲具有匹配到期望测距精度的宽度。
在另一方面中,所述控制器可编程为设置所述期望测距精度。
在一个方面中,所述激光脉冲的所述宽度小于1纳秒。
在另一方面中,所述光学器件包括接收透镜。
在另一方面中,所述光学器件包括发射透镜。
在示例性布置中,所述光学器件包括分束器,从而利用单一透镜作为发射透镜和接收透镜。
在另一方面中,所述分束器包括位于所述单一透镜和所述SiPM检测器中间的偏振镜。
在另一方面中,孔径光阑位于所述盖革模式检测器和所述光学器件中间。
在一个方面中,所述孔径光阑位于所述光学器件的焦点。
在另一方面中,所述孔径光阑具有匹配所需视角的规格,所述所需视角基于所述盖革模式检测器的有效面积的尺寸。
在另一方面中,所述视角小于1度。
在示例性方面中,所述孔径光阑使由所述光学器件收集的光扩散到所述盖革模式检测器的整个有效面积上。
在一个方面中,对于给定焦距f,置于所述焦点且具有长度L的所述盖革模式检测器的所述视角θ由如下公式给出:

其中:
接收透镜的焦距:f;
传感器的水平和竖直长度:Lx,Ly;
传感器视角:θx,y。
在另一方面中,所述孔径光阑具有根据如下公式匹配所述所需视角的规格:

其中:
接收透镜的焦距:f;
传感器视角:θx,y;
孔径光阑尺寸:Px,y。
在一个方面中,控制器能够与所述眼睛安全激光器协作,用以控制所述眼睛安全激光器,使得发射的所述激光脉冲具有匹配到期望测距精度的宽度。
将参照附图更好地理解这些特征和其它特征,提供这些附图以辅助理解本教导。
附图说明
现在将参照附图描述本教导,附图中:
图1示出硅光电倍增管的示例性结构。
图2为示例性硅光电倍增管的示意性电路图。
图3示出用于直接ToF测距的示例性技术。
图4示出示例性ToF测距系统。
图5示出使用图4的ToF测距系统生成的直方图。
图6示出包含SiPM检测器的示例性激光雷达装置。
图6A示出图6的激光雷达装置的细节。
图7示出根据本教导的激光雷达装置的细节。
图8示出根据本教导的激光雷达装置的细节。
图9示出也根据本教导的另一激光雷达装置。
图10示出现有技术的激光雷达装置的激光脉冲宽度图。
图11示出根据本教导的激光雷达装置的激光脉冲宽度图。
具体实施方式
现在将参照利用盖革模式检测器技术的示例性激光雷达装置描述本公开。将理解,提供示例性激光雷达装置以辅助理解本教导且不应被视为以任何方式进行限制。此外,参照任一附图所描述的电路元件或组件可以与其它附图的电路元件或组件或者其它等效电路元件互换,而不脱离本教导的精神。将领会到,为了使说明简洁清楚,在认为合适的情况下,可以在多个图之间重复附图标记以指示相应或相似元件。
首先参照图1,示出了包括盖革模式光电二极管阵列的硅光电倍增管100。如图所示,邻近每个光电二极管提供淬灭电阻器,其可用于限制雪崩电流。光电二极管通过铝或相似导电轨迹而电连接到公共偏置电极和接地电极。在图2中示出了用于传统硅光电倍增管200的示意性电路,其中,光电二极管阵列的阳极连接到公共接地电极,且该阵列的阴极借助限流电阻器连接到公共偏置电极,该公共偏置电极用于在二极管两端施加偏置电压。根据本教导,硅光电倍增管100可以用作盖革模式检测器。不意图将本教导限制到在示例性实施方式中所描述的示例性盖革模式检测器,因为可以利用其它盖革模式检测器,诸如单光子雪崩二极管(SPAD)等。
硅光电倍增管100集成小型的、电隔离的且光学隔离的盖革模式光电二极管215的密集阵列。每个光电二极管215串联耦合到淬灭电阻器220。每个光电二极管215被称为微元。微元的数量通常在100/mm2和3000/mm2之间。然后合计所有微元的信号以形成SiPM 200的输出。提供简化电路以说明图2中的概念。各个微元相同地且独立地检测光子。来自各个这些单独二元检测器的放电电流的总和组合以形成准模拟输出,且因此能够提供关于入射光子通量的振幅的信息。
每当微元经历盖革击穿时,每个微元生成大量高度均匀且量化的电荷。微元(且因此检测器)的增益被定义为输出电荷与电子上的电荷的比。可以从过电压和微元电容计算输出电荷。

其中:
G为微元的增益;
C为微元的电容;
ΔV为过电压;以及
q为电子的电荷。
激光雷达为在多个应用中日益采用的测距技术,这些应用诸如移动测距、汽车高级驾驶辅助系统(Advanced Driver Assistance System,ADAS)、手势识别和3D映射。采用盖革模式检测器(诸如SiPM传感器)比替选传感器技术(诸如雪崩光电二极管(AvalanchePhotoDiode,APD)、PIN二极管和光电倍增管(PhotoMultiplier Tube,PMT))具有多个优势,尤其对于移动和批量产品来说。在图3中示出了通常用于直接ToF测距系统的基础组件。在直接ToF技术中,周期性激光脉冲305指向目标307。目标307使激光光子扩散且反射,且一些光子被反射回朝向检测器315。检测器315将检测到的激光光子(和由于噪声而检测到的一些光子)转换为电信号,然后通过时序电子器件325为这些电信号添加时间戳。
可以通过如下公式使用该飞行时间t计算与目标的距离D:
D=cΔt/2, 公式1
其中,c=光速;以及
Δt=飞行时间。
检测器315必须将返回的激光光子与噪声(环境光)区别。每个激光脉冲捕获至少一个时间戳。这被称为单次测量。当组合来自许多单次测量的数据以产生测距测量值时,可以显著改善信噪比,可以从该测距测量值以高精度和准确度提取检测到的激光脉冲的时序。
现在参照图4,其示出了示例性SiPM传感器400,该SiPM传感器400包括限定传感区405的单光子雪崩光电二极管(SPAD)的阵列。提供用于提供修正光学性质的透镜410。对于透镜系统的给定焦距f,置于焦点且具有长度L的传感器的视角θ由如下公式给出:

其中:
f为接收透镜的焦距;
Lx,Ly为传感器水平和竖直长度;以及
θx,y为SiPM检测器视角。
这意味着,当使用短焦距时,大型传感器具有大视角。当加宽透镜光圈时,检测到更多环境光子,同时返回的激光光子的数量保持恒定。SiPM 400倾向于饱和,如从图5中的直方图窗口的开端处的大过冲显而易见。当传感器400饱和时,激光光子可以不再被SiPM400检测,这导致较低的信号检测率和较低的整体SNRH。
图6示出了示例性激光雷达系统600。该激光雷达系统600包括激光源605,该激光源605用于发射周期性激光脉冲607透过发射透镜604。目标608使激光光子612扩散且反射透过接收透镜610,且一些光子被反射回SiPM传感器615。SiPM传感器615将检测到的激光光子和由于噪声而检测到的一些光子转换为电信号,然后通过时序电子器件为这些电信号添加时间戳。为了避免SiPM传感器610达到饱和点,焦距需要保持相对较长。对于透镜系统的给定焦距f,置于焦点且具有长度L的SiPM传感器615的视角θ由公式2给出。因此,当使用短焦距时,大型传感器需要大视角,如图6A所示。在现有技术的激光雷达传感器中使用几十度级别(高达90°+)的大视角(Angle of View,AoV),其中,检测器注视该场景,同时激光器通常扫描该场景的角度分辨率。这些传感器通常基于PIN和具有强环境光抑制的雪崩二极管。然而,信噪比SNR受大视角的影响很大,因为噪声等级由限制激光雷达系统的精度的接收器AoV设置。此外,这些设备不适合于长距激光雷达,其中,返回的光子的数量要求单光子检测效率。
使用小视角SPAD或SiPM传感器的SiPM检测器满足单光子检测效率要求。小AoV传感器(即<1度)可以被用作扫描系统中的单点传感器以覆盖更大的总AoV或布置成阵列。然而,SPAD/SiPM传感器在动态范围方面受限,这是由于传感器的必要恢复/充电过程。在SiPM的微元中的每次光子检测下,雪崩过程需要通过例如电阻器来淬灭,该电阻器使光电流放电且使二极管脱离击穿区。然后再充电的无源或有源过程开始恢复二极管偏置电压,这恢复初始条件以备下次光子检测。发生淬灭和再充电过程所经历的时间量通常被称为停滞时间或恢复时间。在该时间窗内无法进行进一步检测,这是由于二极管在偏置条件下不处于盖革模式。在SiPM中,当微元进入停滞时间窗时,其它微元仍可以检测光子。因此,微元的数量限定传感器的光子动态范围,这允许每单位时间检测更大数量的光子。当由于停滞时间而没有微元可用于检测时,SiPM被称为处于其饱和区内。需要在SiPM(微元)内的大数量的二极管以补偿抑制检测器的所涉及的单元的恢复过程。大型SiPM提供高动态范围。SiPM的尺寸连同接收的焦距按照公式2且如图6A所示设置视角。
SiPM检测器由于检测器停滞时间而在高环境光条件下经受饱和。本公开通过限制SiPM检测器的视角(AoV)以便避免收集非期望噪声(即非相干环境光)而解决了该问题。用于大型传感器的小视角要求单透镜光学系统中的长焦距。这类焦距不适合于需要在紧凑环境中操作的激光雷达系统,在该紧凑环境中,可用空间为10cm以下。本方案使SiPM传感器(其操作为盖革模式检测器)与接收透镜和孔径光阑元件(其限制AoV且降低焦距需求)配对,从而允许将SiPM传感器并入到在紧凑环境中操作的激光雷达系统中。孔径光阑元件阻止来自大视角的光并使收集的光在SiPM的整个区域之上传播,有效地达到长焦距透镜布置的检测效率。
现在参照图7,其示出了根据本教导的可并入到激光雷达系统中的示例性SiPM传感器700。SiPM传感器700包括限定传感区705的单电子雪崩光电二极管(SPAD)的阵列。提供用于提供修正光学性质的透镜710。在透镜710和传感区705中间提供孔径光阑715,该孔径光阑715阻断来自较大角度的光并使收集的光扩散到传感区705上,因此克服了较长焦距的需求。孔径为促进光传输穿过的开口或孔。光学装置的焦距和孔径决定到达像平面中的焦点的多条光线的圆锥角。孔径校准光线且对于图像质量来说非常重要。当孔径很窄时,允许高度准直光线穿过,这导致像平面上的锐聚焦。然而,当孔径很宽时,允许非准直光线穿过该孔径,这对于来自特定距离的特定光线来说限制锐聚焦。因此,宽孔径对于处于特定距离的对象来说导致清晰图像。输入光线的量也由孔径的尺寸来确定。光学装置可以具有限制射线束的元件。在光学器件中,使用这些元件限制由光学装置准许进入的光。这些元件统称为光阑。孔径光阑为在图像点处设置光线圆锥角和亮度的光阑。由于孔径光阑715,SiPM700的光学器件的焦距可以显著小于SiPM 400的光学器件的焦距。
为了减小视角的同时保持给定精度和测距精度所需的动态范围,通常将大型传感器与长焦距透镜孔径配对,如图6A所示。然而,对于最大长度通常为大约10cm以下的紧凑型系统来说,大约10+cm的长焦距是没有吸引力的。需要紧凑型激光雷达系统的应用包括自动驾驶汽车、高级驾驶辅助系统(ADAS)和3D成像。本方案提供激光雷达装置800,该激光雷达装置800利用SPAD/SiPM技术的益处且适合于通过并入孔径光阑元件820而容纳在紧凑环境中。孔径光阑元件820位于传感器815和短焦距透镜810之间。孔径光阑820具有两个主要功能。第一,使用孔径光阑阻断来自原始较大角度的光。该孔径光阑的尺寸基于传感器区域的尺寸和焦距。第二,孔径光阑使收集的光扩算到传感器的整个有效面积上,以开拓由于大型传感器而可用的动态范围。
孔径光阑的规格和位置涉及传感器区域的尺寸以及接收透镜的期望视角和焦距。规格Px,y可以根据如下公式而匹配所需视角:

同时将传感器置于特定距离以保证光扩散到整个有效面积上:

其中:
f为接收透镜的焦距;
θx,y为传感器视角;
Px,y为孔径光阑规格;以及
D透镜为接收透镜的直径。
光可以在传感器有效面积上均匀地扩散;然而,不需要成像能力,因为该系统为单点传感器。注意,给定公式表示理论最大值且通过示例方式来提供。距离可能需要调整以便考虑容差。
现在参照图9,其示出了也根据本教导的示例性激光雷达装置900。该激光雷达装置900基本上类似于激光雷达装置800,且通过相似附图标记指示相似元件。主要区别在于,激光雷达装置900包括用于发射器905和接收器910的共享光学器件。在透镜810和孔径光阑820中间提供由偏振镜920提供的分束器。偏振镜将激光束反射到场景上并将反射光导向到SiPM传感器910上。
本领域的普通技术人员将领会到,通过利用孔径光阑允许激光雷达系统800和激光雷达系统900具有短焦距,同时利用1mm2以上级别的大型传感器区域。由于本教导的激光雷达装置利用具有短焦距的光学系统,因此允许激光雷达系统并入到紧凑环境中,该紧凑环境在检测器和接收器光学器件之间具有10cm以下的长度。如下表格提供了用于根据本教导的激光雷达装置的组件的一些示例性规格。示例性规格仅通过示例方式来提供且不意图将本教导限制到提供的示例性规格。

激光雷达装置900可以操作为飞行时间(Time of Flight,ToF)激光雷达系统,使得激光脉冲在已知时间处离开发射器905。在激光脉冲撞击目标925之后,反射光返回到接收器910。如果目标925具有似镜子的表面,则镜面反射将以等于入射角的角度反射光子。这可以导致在接收器910处检测到最大数量的由该目标反射的光子。可以使用标准雪崩光电二极管(APD)来检测来自回射器的光,该回射器使光沿着入射路径反射回去,无论入射角如何。然而,在真实世界中的大多数表面为非镜面目标且不直接反射入射光。这些非镜面表面通常可以被表示为朗伯表面。当通过具有有限视角(AoV)的接收器观察朗伯表面时,接收的光子的量不随着观察的角度而变化,且使光子跨2π球面度表面而传播。朗伯反射体的净影响是返回的光子的数量与1/距离2成正比。另外,发射的光子的数量受眼睛安全约束限制。由于返回的光子的数量的1/距离2减少和无法简单地增大源功率,因此需要检测到的每个光子都有助于激光雷达系统900的总体精度。
典型的现有技术的ToF激光雷达系统使用脉冲或连续照射。连续照射使用连续时变信号,该连续时变信号可以被表示为正弦信号。为了检测目标的距离,需要获得该信号并确定输出信号和输入信号之间的任何相角偏移。然后使用该偏移计算从源到目标的距离。根据操作本身,需要检测正弦信号的峰值和真值。检测信号的峰值和真值二者的现有技术需求浪费光子,这是因为在确定目标距离时并不使用所有检测到的光子。这需要在低反射率目标的长距离检测中使用高光学功率、潜在非眼睛安全信号源。
用于ToF激光雷达的替选方法是使用脉冲信号源且检测开启信号源的时间与在接收器处检测到脉冲的时间之间的直接飞行时间。直接和间接ToF激光雷达系统之间的重要区别在于,直接ToF系统仅需要首次检测到的光子来准确地确定与目标的距离。利用该区别允许直接ToF激光雷达系统使用更少数量的返回光子准确地确定目标距离。因此,为了在相同距离上提供目标测距,直接ToF系统可以使用比连续照射系统更低的脉冲源。
脉冲的宽度具有用于长距离激光雷达系统的两个主要启示。第一,激光脉冲宽度必须匹配检测器的带宽。现有技术的基于线性光电二极管的激光雷达系统是带宽受限的且需要4纳秒以上的脉冲宽度来充分地捕获返回信号。当接收的脉冲的强度变得更低时,正如长距离低反射率目标那样,脉冲宽度也变成传感器的精度方面的主导因素。可以在激光脉冲内的随机时间点触发脉冲的检测。因此长脉冲转化为测量的较低精度。
高带宽传感器(诸如SPAD/SiPM)可以在较低脉冲宽度下操作,因为非线性操作模式和低上升时间。针对目标测距精度计算最佳脉冲宽度会很有用,这允许使用功率较低的光源。假定光以c、光速、或299792458m/s行进,且可以通过如下公式确定目标与激光雷达系统之间的距离d。

其中,Δt为将光源应用于目标与在接收器处从目标接收返回的光之间的时间差。
该公式可以被重写以确定应用光源与在接收器处检测到返回的光之间的时间差、或t。这可以通过如下公式来表达:

其中,Δd为所需的测距精度。因此,例如对于10cm的期望测距精度,则期望667ps的激光脉冲宽度。
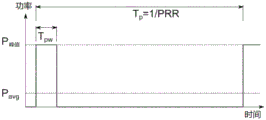
脉冲的减小允许达到更高峰值功率的同时保持相同的平均功率,这对于眼睛安全计算来说至关重要。参照图10,可以从重复率PRR、脉冲宽度Tpw和峰值功率P峰值计算激光脉冲的平均功率:

由于眼睛安全限制而固定平均功率,则将峰值功率计算为:

因此,在相同平均功率下可以通过降低脉冲宽度而达到更高激光峰值功率,如图11所示。
本公开描述了激光雷达装置800,该激光雷达装置800包括用于发射激光脉冲的眼睛安全激光源900。SiPM检测器910检测从目标925反射的光子。透镜810提供光学器件。控制器940与眼睛安全激光器900协作,用以控制眼睛安全激光源900,使得发射的激光脉冲具有选择性地匹配到期望测距精度的宽度。控制器940控制激光源使得脉冲宽度的平均功率被固定以满足眼睛安全限制。在由例如美国国家标准协会(American National StandardsInstitute,Ansi)Z136系列或国际标准IEC60825提出的标准中详细描述激光源眼睛安全限制。因此,设想激光源905可与Ansi Z136或IEC60825标准兼容。激光脉冲的平均功率可以被固定以满足在Ansi Z136和IEC60825标准中的至少一者中提出的眼睛安全标准。不意图将本教导限制到通过示例方式提供的示例性眼睛安全标准。
控制器940可操作以控制激光源,使得眼睛安全激光源配置成改变脉冲宽度,从而达到预定平均功率。例如,眼睛安全激光源通过减小激光脉冲的脉冲宽度而应用具有相同的预定平均功率的更高激光峰值功率。可替选地,眼睛安全激光源通过增大激光脉冲的脉冲宽度而应用具有相同的预定平均功率的更低激光峰值功率。眼睛安全激光源可以被配置成使得发射的激光脉冲具有匹配到期望检测分辨率的宽度,使得所检测的每个发射光子有助于期望测距精度。例如,对于10cm的期望测距精度,激光脉冲宽度被设为667皮秒。控制器940可编程为设置期望测距精度。在示例性实施方式中,激光脉冲的宽度小于1纳秒。
本领域的技术人员将领会到,可以对上述实施方式进行各种修改而不脱离本实用新型的范围。采用该方式将理解,本教导将仅限于按照所附权利要求被视为必要的范围。术语半导体光电倍增管意图覆盖任何固态光电倍增管设备,诸如硅光电倍增管(SiPM)、微像素光子计数器(MicroPixel Photon Counter,MPPC)、微像素雪崩光电二极管(MicroPixelAvalanche Photodiode,MAPD),但不限于此。
相似地,词语包括/包含在用在说明书中时用于指定所陈述的特征、整数、步骤、或组件的存在,但是不排除一个或多个附加特征、整数、步骤、组件和/或其组合的存在或附加。
Claims (25)
1.一种激光雷达装置,其特征在于,包括:
用于发射激光脉冲的眼睛安全激光源;
用于检测反射光子的盖革模式检测器;以及
光学器件;
其中,所述眼睛安全激光源被配置成使得所发射的所述激光脉冲具有选择性地匹配到期望测距精度的脉冲宽度。
2.如权利要求1所述的激光雷达装置,其中,所述激光脉冲的平均功率被固定以满足在AnsiZ136和IEC60825标准中的至少一者中提出的眼睛安全标准。
3.如权利要求1或2所述的激光雷达装置,其中,所述眼睛安全激光源配置成改变所述脉冲宽度,从而达到预定平均功率。
4.如权利要求3所述的激光雷达装置,其中,所述眼睛安全激光源配置成通过减小所述激光脉冲的所述脉冲宽度而应用具有相同的所述预定平均功率相同的更高激光峰值功率。
5.如权利要求3所述的激光雷达装置,其中,所述眼睛安全激光源配置成通过增大所述激光脉冲的所述脉冲宽度而应用具有相同的所述预定平均功率的更低激光峰值功率。
6.如权利要求3所述的激光雷达装置,其中,使用如下公式计算激光峰值功率:

其中:
Pavg为所述激光脉冲的平均功率;
Tpw为所述脉冲宽度;以及
PRR为重复率。
7.如权利要求1所述的激光雷达装置,其中,所述眼睛安全激光源被配置成使得发射的所述激光脉冲具有匹配到期望检测分辨率的脉冲宽度,从而使得检测的每个发射光子有助于所述期望测距精度。
8.如权利要求1所述的激光雷达装置,其中,使用如下公式计算期望的激光脉冲宽度:

其中:
Δd为所述期望测距精度;
c为光速;以及
t为所述激光脉冲宽度。
9.如权利要求8所述的激光雷达装置,其中,对于10cm的期望测距精度,所述激光脉冲宽度被设为667皮秒。
10.如权利要求1所述的激光雷达装置,其中,所述盖革模式检测器为单光子传感器。
11.如权利要求1所述的激光雷达装置,其中,所述盖革模式检测器由单光子雪崩光电二极管(SPAD)传感器的总阵列形成。
12.如权利要求1所述的激光雷达装置,其中,所述激光雷达装置还包括控制器,所述控制器能够与所述眼睛安全激光源协作,用以控制所述眼睛安全激光源,使得所发射的激光脉冲具有匹配到期望测距精度的脉冲宽度。
13.如权利要求12所述的激光雷达装置,其中,所述控制器可编程为设置所述期望测距精度。
14.如权利要求1所述的激光雷达装置,其中,所述激光脉冲的所述脉冲宽度小于1纳秒。
15.如权利要求1所述的激光雷达装置,其中,所述光学器件包括接收透镜。
16.如权利要求15所述的激光雷达装置,其中,所述光学器件包括发射透镜。
17.如权利要求16所述的激光雷达装置,其中,所述光学器件包括分束器,从而利用单一透镜进行发射和接收。
18.如权利要求17所述的激光雷达装置,其中,所述分束器包括位于所述单一透镜和所述盖革模式检测器中间的偏振镜。
19.如权利要求1所述的激光雷达装置,其中,孔径光阑位于所述盖革模式检测器和所述光学器件中间。
20.如权利要求19所述的激光雷达装置,其中,所述孔径光阑位于所述光学器件的焦点。
21.如权利要求20所述的激光雷达装置,其中,所述孔径光阑具有匹配所需视角的规格,所述所需视角基于所述SiPM检测器的有效面积的尺寸。
22.如权利要求21所述的激光雷达装置,其中,所述视角小于1度。
23.如权利要求19所述的激光雷达装置,其中,所述孔径光阑使由所述光学器件收集的光扩散到所述SiPM检测器的整个有效面积上。
24.如权利要求21所述的激光雷达装置,其中,对于给定焦距f,置于所述焦点且具有长度L的所述SiPM检测器的所述视角θx,y由如下公式给出:

其中:
接收透镜的焦距:f;
传感器的水平和竖直长度:Lx,Ly;
传感器视角:θx,y。
25.如权利要求21所述的激光雷达装置,其中,所述孔径光阑具有根据如下公式匹配所述所需视角的规格:

其中:
接收透镜的焦距:f;
传感器视角:θx,y;
孔径光阑尺寸:Px,y。
Applications Claiming Priority (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US15/377,289 US20180164410A1 (en) | 2016-12-13 | 2016-12-13 | LiDAR Apparatus |
| US15/377,289 | 2016-12-13 | ||
| US15/383,328 US20180164412A1 (en) | 2016-12-13 | 2016-12-19 | LiDAR Apparatus |
| US15/383,328 | 2016-12-19 | ||
| PCT/EP2017/082564 WO2018108981A1 (en) | 2016-12-13 | 2017-12-13 | A lidar apparatus |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| CN211014629U true CN211014629U (zh) | 2020-07-14 |
Family
ID=60702750
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN201790001507.6U Expired - Fee Related CN211014629U (zh) | 2016-12-13 | 2017-12-13 | 一种激光雷达装置 |
Country Status (6)
| Country | Link |
|---|---|
| US (1) | US20180164412A1 (zh) |
| JP (1) | JP2020515812A (zh) |
| KR (1) | KR20190002012U (zh) |
| CN (1) | CN211014629U (zh) |
| DE (1) | DE212017000247U1 (zh) |
| WO (1) | WO2018108981A1 (zh) |
Families Citing this family (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US10627899B2 (en) | 2018-02-09 | 2020-04-21 | Microsoft Technology Licensing, Llc | Eye tracking system for use in a visible light display device |
| US10551914B2 (en) * | 2018-02-09 | 2020-02-04 | Microsoft Technology Licensing, Llc | Efficient MEMs-based eye tracking system with a silicon photomultiplier sensor |
| JP7079753B2 (ja) | 2019-06-11 | 2022-06-02 | 株式会社東芝 | 光検出装置、電子装置及び光検出方法 |
| JP7133523B2 (ja) | 2019-09-05 | 2022-09-08 | 株式会社東芝 | 光検出装置及び電子装置 |
| JP7328868B2 (ja) * | 2019-10-30 | 2023-08-17 | 株式会社東芝 | 光検出器、光検出システム、ライダー装置、及び車 |
| KR102289844B1 (ko) * | 2019-10-31 | 2021-08-18 | 한국원자력연구원 | 공축 라이다 장치 |
| JP2021120630A (ja) * | 2020-01-30 | 2021-08-19 | ソニーセミコンダクタソリューションズ株式会社 | 測距装置及び測距方法 |
| US20230258779A1 (en) * | 2020-08-31 | 2023-08-17 | Mitsubishi Electric Corporation | Distance measurement apparatus |
| DE102021119905A1 (de) | 2021-07-30 | 2023-02-02 | Marelli Automotive Lighting Reutlingen (Germany) GmbH | Lichtmodul und Verfahren zum Betreiben eines Lichtmoduls |
| DE102021125505A1 (de) | 2021-10-01 | 2023-04-06 | Marelli Automotive Lighting Reutlingen (Germany) GmbH | LiDAR-Modul und Verfahren zum Betrieb eines LiDAR-Moduls |
| JP2023116281A (ja) * | 2022-02-09 | 2023-08-22 | 株式会社小糸製作所 | 投光器、及び測定装置 |
Family Cites Families (21)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US2949808A (en) * | 1956-07-03 | 1960-08-23 | Gen Motors Corp | Aerial gunsight |
| JPH01121782A (ja) * | 1987-11-05 | 1989-05-15 | Mitsubishi Electric Corp | 受光装置 |
| US5159412A (en) * | 1991-03-15 | 1992-10-27 | Therma-Wave, Inc. | Optical measurement device with enhanced sensitivity |
| JP3654090B2 (ja) * | 1999-10-26 | 2005-06-02 | 松下電工株式会社 | 距離計測方法およびその装置 |
| US6593582B2 (en) * | 2001-05-11 | 2003-07-15 | Science & Engineering Services, Inc. | Portable digital lidar system |
| US20080304012A1 (en) * | 2007-06-06 | 2008-12-11 | Kwon Young K | Retinal reflection generation and detection system and associated methods |
| EP2469301A1 (en) * | 2010-12-23 | 2012-06-27 | André Borowski | Methods and devices for generating a representation of a 3D scene at very high speed |
| EP2469295A1 (en) * | 2010-12-23 | 2012-06-27 | André Borowski | 3D landscape real-time imager and corresponding imaging methods |
| US9689667B2 (en) * | 2011-03-17 | 2017-06-27 | Universitat Politecnica De Catalunya | System, method and computer program for receiving a light beam |
| DE102011005740A1 (de) * | 2011-03-17 | 2012-09-20 | Robert Bosch Gmbh | Messvorrichtung zur Messung einer Entfernung zwischen der Messvorrichtung und einem Zielobjekt mit Hilfe optischer Messstrahlung |
| US10684362B2 (en) * | 2011-06-30 | 2020-06-16 | The Regents Of The University Of Colorado | Remote measurement of shallow depths in semi-transparent media |
| EP2705350B1 (en) * | 2011-06-30 | 2017-04-05 | The Regents of the University of Colorado, a body corporate | Remote measurement of shallow depths in semi-transparent media |
| CN103733609B (zh) * | 2011-08-03 | 2017-07-11 | 皇家飞利浦有限公司 | 用于数字硅光电倍增器阵列的位置敏感的读出模式 |
| US9625580B2 (en) * | 2014-01-03 | 2017-04-18 | Princeton Lightwave, Inc. | LiDAR system comprising a single-photon detector |
| DE102014100696B3 (de) * | 2014-01-22 | 2014-12-31 | Sick Ag | Entfernungsmessender Sensor und Verfahren zur Erfassung und Abstandsbestimmung von Objekten |
| DE102014102420A1 (de) * | 2014-02-25 | 2015-08-27 | Sick Ag | Optoelektronischer Sensor und Verfahren zur Objekterfassung in einem Überwachungsbereich |
| US9658336B2 (en) * | 2014-08-20 | 2017-05-23 | Omnivision Technologies, Inc. | Programmable current source for a time of flight 3D image sensor |
| US10073177B2 (en) * | 2014-11-14 | 2018-09-11 | Massachusetts Institute Of Technology | Methods and apparatus for phased array imaging |
| JP6410258B2 (ja) * | 2015-03-02 | 2018-10-24 | 株式会社トプコン | 光波距離計 |
| JP6852085B2 (ja) * | 2015-11-30 | 2021-03-31 | ルミナー テクノロジーズ インコーポレイテッド | 分布型レーザー及び複数のセンサー・ヘッドを備える光検出及び測距システム、並びに、光検出及び測距システムのパルス・レーザー |
| US10502830B2 (en) * | 2016-10-13 | 2019-12-10 | Waymo Llc | Limitation of noise on light detectors using an aperture |
-
2016
- 2016-12-19 US US15/383,328 patent/US20180164412A1/en not_active Abandoned
-
2017
- 2017-12-13 DE DE212017000247.6U patent/DE212017000247U1/de not_active Expired - Lifetime
- 2017-12-13 JP JP2019533049A patent/JP2020515812A/ja active Pending
- 2017-12-13 KR KR2020197000040U patent/KR20190002012U/ko not_active Application Discontinuation
- 2017-12-13 WO PCT/EP2017/082564 patent/WO2018108981A1/en active Application Filing
- 2017-12-13 CN CN201790001507.6U patent/CN211014629U/zh not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| US20180164412A1 (en) | 2018-06-14 |
| DE212017000247U1 (de) | 2019-06-28 |
| WO2018108981A1 (en) | 2018-06-21 |
| JP2020515812A (ja) | 2020-05-28 |
| KR20190002012U (ko) | 2019-08-07 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN211014629U (zh) | 一种激光雷达装置 | |
| CN211014630U (zh) | 激光雷达设备及机动车系统 | |
| KR102364531B1 (ko) | 잡음 적응형 솔리드-스테이트 lidar 시스템 | |
| US11467286B2 (en) | Methods and systems for high-resolution long-range flash lidar | |
| US20180164410A1 (en) | LiDAR Apparatus | |
| US10775507B2 (en) | Adaptive transmission power control for a LIDAR | |
| US10422862B2 (en) | LiDAR apparatus | |
| Kostamovaara et al. | On laser ranging based on high-speed/energy laser diode pulses and single-photon detection techniques | |
| CN110651199B (zh) | 光检测器以及便携式电子设备 | |
| US20230007979A1 (en) | Lidar with photon-resolving detector | |
| US20210088661A1 (en) | Photodetector and optical ranging apparatus using the same | |
| US20240219527A1 (en) | LONG-RANGE LiDAR | |
| US20240192375A1 (en) | Guided flash lidar | |
| US20240210526A1 (en) | Optical system for full frame flash solid state lidar system | |
| US20240061087A1 (en) | Lidar system with fly's eye lens arrays | |
| Dabidian et al. | Direct Time-of-Flight (d-ToF) Pulsed LiDAR Sensor with Simultaneous Noise and Interference Suppression | |
| Oh et al. | Techniques for improved performances of direct-detection three-dimensional imaging laser radar system using Geiger-mode avalanche photodiode | |
| WO2023059766A1 (en) | Hybrid lidar system | |
| Zappa | Time-of-flight single-photon avalanche diode imagers |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| GR01 | Patent grant | ||
| GR01 | Patent grant | ||
| CF01 | Termination of patent right due to non-payment of annual fee | ||
| CF01 | Termination of patent right due to non-payment of annual fee |
Granted publication date: 20200714 Termination date: 20211213 |