CN201771265U - 一种智能门锁反锁机构 - Google Patents
一种智能门锁反锁机构 Download PDFInfo
- Publication number
- CN201771265U CN201771265U CN2010205286036U CN201020528603U CN201771265U CN 201771265 U CN201771265 U CN 201771265U CN 2010205286036 U CN2010205286036 U CN 2010205286036U CN 201020528603 U CN201020528603 U CN 201020528603U CN 201771265 U CN201771265 U CN 201771265U
- Authority
- CN
- China
- Prior art keywords
- block
- dead bolt
- door lock
- driven gear
- intelligent door
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images





Abstract
本实用新型涉及一种智能门锁反锁机构,其特征在于,包括手柄、与手柄固接的主动齿轮、与主动齿轮啮合配合的从动齿轮、与从动齿轮通过挡块组件单向转动的锁舌拨杆凸轮、贯穿锁舌拨杆凸轮且与锁舌拨杆凸轮固接的凸轮轴、以及与凸轮轴连接并驱动反锁锁舌直线运动的锁芯机构。本实用新型通过旋转手柄带动主动齿轮转动,主动齿轮带动与之啮合配合的从动齿轮转动,在从动齿轮和锁舌拨杆凸轮间设置挡块组件,实现从动齿轮带动锁舌拨杆凸轮单向转动且反向空转;锁舌拨杆凸轮中部贯穿设置有凸轮轴,锁舌拨杆凸轮转动从而带动凸轮轴的转动;凸轮轴一端与锁芯机构连接,凸轮轴的转动拨动锁芯机构内的反锁锁舌直线运动,从而实现反锁。
Description
技术领域
本实用新型涉及一种智能门锁,更具体地说,涉及一种一种智能门锁的反锁机构。
背景技术
门锁是一种保障室内安全的装置,目前,智能门锁大多设置有反锁机构,然而这种反锁机构均为室内反锁机构,即人员在室内旋动反锁按钮实现反锁,室外人员即使有钥匙,也不能开锁进入室内;室内人员旋动反锁旋钮,取消反锁后,室外人员才能够正常开锁进入室内。
室内反锁存在的缺陷是安全性不够,这类反锁机构保障的是人员在室内这种情况下的安全性,一旦室内主人外出,房屋的安全性就得不到保障。
实用新型内容
本实用新型要解决的技术问题在于,针对现有技术中智能门锁都是设置室内反锁机构,不能进行室外反锁这一缺陷,提供一种智能门锁反锁机构能够实现门外反锁。
本实用新型解决其技术问题所采用的技术方案是:一种智能门锁反锁机构,其特征在于,包括手柄、与所述手柄固接的主动齿轮、与所述主动齿轮啮合配合的从动齿轮、与所述从动齿轮通过挡块组件单向转动的锁舌拨杆凸轮、贯穿所述锁舌拨杆凸轮且与所述锁舌拨杆凸轮固接的凸轮轴、以及与所述凸轮轴连接并驱动反锁锁舌直线运动的锁芯机构。
本实用新型一种智能门锁反锁机构,优选的,所述挡块组件包括设置在所述锁舌拨杆凸轮上的挡块、以及设置在所述从动齿轮上供所述挡块运动的凹槽。
本实用新型一种智能门锁反锁机构,优选的,所述凹槽包括一个与所述挡块配合的挡面。
本实用新型一种智能门锁反锁机构,优选的,所述挡块组件包括设置在所述从动齿轮上的挡块、以及设置在所述锁舌拨杆凸轮上供所述挡块运动的凹槽。
本实用新型一种智能门锁反锁机构,优选的,所述凹槽包括一个与所述挡块配合的挡面。
本实用新型一种智能门锁反锁机构,优选的,所述挡块组件包括设置在所述从动齿轮上的第一挡块、以及设置在所述锁舌拨杆凸轮上的第二挡块;所述第一挡块与所述第二挡块面接触。
本实用新型一种智能门锁反锁机构,优选的,还包括与所述手柄连接的手柄复位弹簧。
本实用新型可达到以下有益效果:旋转手柄带动主动齿轮转动,主动齿轮带动与之啮合配合的从动齿轮转动,通过在从动齿轮和锁舌拨杆凸轮间设置挡块组件,实现从动齿轮带动锁舌拨杆凸轮单向转动且反向空转;锁舌拨杆凸轮中部贯穿设置有凸轮轴,锁舌拨杆凸轮转动从而带动凸轮轴的转动;凸轮轴一端与锁芯机构连接,凸轮轴的转动拨动锁芯机构内的反锁锁舌直线运动,从而实现反锁。
附图说明
下面将结合附图及实施例对本实用新型作进一步说明,附图中:
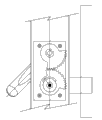
图1是本实用新型的一种智能门锁反锁机构的主视示意图;
图2是本实用新型的一种智能门锁反锁机构的图1的A-A剖视示意图;
图3是本实用新型的种智能门锁反锁机构的反锁前的位置示意图;
图4是本实用新型的种智能门锁反锁机构的反锁过程中的位置示意图;
图5是本实用新型的种智能门锁反锁机构的反锁后手柄复位的位置示意图;
图6是本实用新型的种智能门锁反锁机构的反锁后手柄下抬的位置示意图;
图7是本实用新型的种智能门锁反锁机构的开锁时的位置示意图;
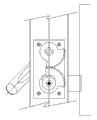
图8是本实用新型的一种智能门锁反锁机构的后视示意图;
图9是本实用新型的一种智能门锁反锁机构的立体示意图。
具体实施方式
为了对本实用新型的技术特征、目的和效果有更加清楚的理解,现对照附图详细说明本实用新型的具体实施方式。
如图1、图2、图8和图9为本实用新型一种智能门锁反锁机构提供的优选实施例,包括手柄1、与手柄1固接的主动齿轮2、与主动齿轮2啮合配合的从动齿轮3、与从动齿轮3通过挡块组件单向转动的锁舌拨杆凸轮4、贯穿锁舌拨杆凸轮4且与锁舌拨杆凸轮4固接的凸轮轴9、以及与凸轮轴9连接并驱动反锁锁舌6直线运动的锁芯机构。
手柄1用于操作门锁开闭,主动齿轮2与手柄1通过销轴固定,与手柄1同步转动。从动齿轮3与主动齿轮2通过齿轮啮合,由主动齿轮驱动转动。
锁舌拨杆凸轮4与从动齿轮3之间通过设置挡块组件实现锁舌拨杆凸轮4的单方向运动。
挡块组件的实施例一,如图1所示,从动齿轮3上设置有凹槽10,锁舌拨杆凸轮4上设置有凸起的挡块11,挡块11与凹槽10之间相互配合的挡面,通过挡面推动挡块11在凹槽10中运动。空旋锁芯在正常开锁状况下,手柄沿顺时针方向旋动,因此凹槽10的周向长度有一定限制,优选的,锁舌拨杆凸轮4沿凹槽逆时针旋转40°。当从动齿轮3逆时针旋转时,带动锁舌拨杆凸轮4同时逆时针旋转;反之,当从动齿轮3顺时针旋转时,则锁舌拨杆凸轮4停留在原来的位置上,即从动齿轮3顺时针空转,从而实现锁舌拨杆凸轮4的单向转动。
挡块组件的实施例二,锁舌拨杆凸轮4设置有凹槽10,从动齿轮3上设置有凸起的挡块11,挡块11与凹槽10之间相互配合的挡面,通过挡面推动挡块11在凹槽10中运动。空旋锁芯在正常开锁状况下,手柄沿顺时针方向旋动,因此凹槽10的周向长度有一定限制,优选的,锁舌拨杆凸轮4沿凹槽逆时针旋转40°。当从动齿轮3逆时针旋转时,带动锁舌拨杆凸轮4同时逆时针旋转;反之,当从动齿轮3顺时针旋转时,则锁舌拨杆凸轮4停留在原来的位置上,即从动齿轮3顺时针空转,从而实现锁舌拨杆凸轮4的单向转动。
挡块组件的实施例三,锁舌拨杆凸轮4设置有凸起的第一挡块,从动齿轮3上设置有凸起的第二挡块,第一挡块与第二挡块之间相互配合的挡面,通过挡面第二挡块推动第一挡块运动。空旋锁芯在正常开锁状况下,手柄沿顺时针方向旋动,因此凹槽10的周向长度有一定限制,优选的,锁舌拨杆凸轮4沿凹槽逆时针旋转40°。当从动齿轮3逆时针旋转时,带动锁舌拨杆凸轮4同时逆时针旋转;反之,当从动齿轮3顺时针旋转时,则锁舌拨杆凸轮4停留在原来的位置上,即从动齿轮3顺时针空转,从而实现锁舌拨杆凸轮4的单向转动。
进一步的,凸轮轴9贯穿锁舌拨杆凸轮4,并两者焊接成一体,锁舌拨杆凸轮4逆时针旋转时,会带动凸轮轴9逆时针旋转。
凸轮轴9与锁芯机构连接,凸轮轴9的转动驱动锁芯机构内的反锁锁舌6做直线运动,反锁锁舌6伸出插入门边距8中,即反锁锁舌6完成反锁。
凸轮轴9的转动驱动锁芯机构内的反锁锁舌6运动,凸轮轴9与反锁锁舌6的连接方式为丝杆驱动。
进一步的,手柄复位扭簧5可双向驱动手柄1复位。主动齿轮2、从动齿轮3、以及锁舌拨杆凸轮4被齿轮组盖板7固定齿轮平面,限制齿轮轴向窜动。
工作原理示意图分图说明:0°为水平方向,即空旋锁芯的手柄在复位情况下所处的常态位置。
如图3所示,门关上以后,还没有被反锁时的初始状态。手柄1处于0°位置,其他各零件也都处于0°的初始状态。
如图4所示,反锁时,手柄1向上抬起,手柄1带动主动齿轮2顺时针转动,设计转角40°,主动齿轮2带动从动齿轮3反时针转动40°,从动轮同时带动锁舌拨杆凸轮4也一起转动40°,凸轮轴9推动锁芯机构使得反锁锁舌6伸出,达到反锁目的。
如图5所示,松开手柄1,在复位扭簧5的带动下手柄1回到0°位置,主动齿轮2和从动齿轮3也都回到0°位置。然而,锁舌拨杆凸轮4却因为锁芯机构的制约,停留在反锁位置,保证反锁锁舌6不被齿轮运动缩回。
如图6所示,门反锁以后,在没有合法的钥匙或者电子门卡的情况下,有人从外面向下,即正常开门方向转动手柄1,此时,齿轮组空转,并不能影响反锁锁舌6和锁舌拨杆凸轮轴4保持在反锁位置上。
如图7所示,在使用合法门卡或钥匙开门时,锁芯内的相应机构动作,构成了开门的条件。顺时针向下转动手柄1,手柄1的拨杆带动锁芯内的机构动作,反锁锁舌6缩回,打开门锁。此时的齿轮组仍旧是空转,反锁锁舌6和锁舌拨杆凸轮4的复位是靠锁芯内部的机构驱动的,仍旧不是由齿轮组驱动的。
此机构简单实用,充分利用空旋锁芯的“剩余”功能,实现了上抬手柄门外反锁的目的,简单、实用且造价低。这种“空旋锁芯”非常普及,价格低廉并且很容易获得。这种机构的门锁改造原有的门锁既便宜、方便又可以大大地提高了门锁的安全性。
上面结合附图对本实用新型的实施例进行了描述,但是本实用新型并不局限于上述的具体实施方式,上述的具体实施方式仅仅是示意性的,而不是限制性的,本领域的普通技术人员在本实用新型的启示下,在不脱离本实用新型宗旨和权利要求所保护的范围情况下,还可做出很多形式,这些均属于本实用新型的保护之内。
Claims (7)
1.一种智能门锁反锁机构,其特征在于,包括手柄(1)、与所述手柄(1)固接的主动齿轮(2)、与所述主动齿轮(2)啮合配合的从动齿轮(3)、与所述从动齿轮(3)通过挡块组件单向转动的锁舌拨杆凸轮(4)、贯穿所述锁舌拨杆凸轮(4)且与所述锁舌拨杆凸轮(4)固接的凸轮轴(9)、以及与所述凸轮轴(9)连接并驱动反锁锁舌(6)直线运动的锁芯机构。
2.根据权利要求1所述的智能门锁反锁机构,其特征在于,所述挡块组件包括设置在所述锁舌拨杆凸轮(4)上的挡块(11)、以及设置在所述从动齿轮(3)上供所述挡块(11)运动的凹槽(10)。
3.根据权利要求2所述的智能门锁反锁机构,其特征在于,所述凹槽(10)包括一个与所述挡块(11)配合的挡面。
4.根据权利要求1所述的智能门锁反锁机构,其特征在于,所述挡块组件包括设置在所述从动齿轮(3)上的挡块、以及设置在所述锁舌拨杆凸轮(4)上供所述挡块运动的凹槽。
5.根据权利要求4所述的智能门锁反锁机构,其特征在于,所述凹槽(10)包括一个与所述挡块(11)配合的挡面。
6.根据权利要求1所述的智能门锁反锁机构,其特征在于,所述挡块组件包括设置在所述从动齿轮(3)上的第一挡块、以及设置在所述锁舌拨杆凸轮(4)上的第二挡块;所述第一挡块与所述第二挡块面接触。
7.根据权利要求1所述的智能门锁反锁机构,其特征在于,还包括与所述手柄(1)连接的手柄复位弹簧(5)。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN2010205286036U CN201771265U (zh) | 2010-09-14 | 2010-09-14 | 一种智能门锁反锁机构 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN2010205286036U CN201771265U (zh) | 2010-09-14 | 2010-09-14 | 一种智能门锁反锁机构 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| CN201771265U true CN201771265U (zh) | 2011-03-23 |
Family
ID=43751109
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN2010205286036U Expired - Fee Related CN201771265U (zh) | 2010-09-14 | 2010-09-14 | 一种智能门锁反锁机构 |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN201771265U (zh) |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN104631912A (zh) * | 2015-02-11 | 2015-05-20 | 浙江钟铮锁业有限公司 | 一种机械、电子组合控制的锁具 |
| WO2018040152A1 (zh) * | 2016-08-31 | 2018-03-08 | 李双杰 | 门锁面板装置 |
| CN109736639A (zh) * | 2019-01-25 | 2019-05-10 | 广东金点原子安防科技股份有限公司 | 一种锁舌的传动机构 |
| CN113700399A (zh) * | 2018-12-19 | 2021-11-26 | 麦格纳覆盖件有限公司 | 致动器和用于车辆的门的车门致动系统 |
-
2010
- 2010-09-14 CN CN2010205286036U patent/CN201771265U/zh not_active Expired - Fee Related
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN104631912A (zh) * | 2015-02-11 | 2015-05-20 | 浙江钟铮锁业有限公司 | 一种机械、电子组合控制的锁具 |
| WO2018040152A1 (zh) * | 2016-08-31 | 2018-03-08 | 李双杰 | 门锁面板装置 |
| CN113700399A (zh) * | 2018-12-19 | 2021-11-26 | 麦格纳覆盖件有限公司 | 致动器和用于车辆的门的车门致动系统 |
| CN109736639A (zh) * | 2019-01-25 | 2019-05-10 | 广东金点原子安防科技股份有限公司 | 一种锁舌的传动机构 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN106320815B (zh) | 一种智能面板锁 | |
| CN201771265U (zh) | 一种智能门锁反锁机构 | |
| CN203420535U (zh) | 一种tm卡智能锁 | |
| CN109577750B (zh) | 一种电子锁 | |
| CN201661141U (zh) | 一种内插式电动门锁 | |
| CN202064694U (zh) | 一种自动上锁的智能防盗锁 | |
| CN201214944Y (zh) | 一种可自动锁定的推拉窗 | |
| CN202152569U (zh) | 新型门锁 | |
| CN102226360B (zh) | 轴向驱动离合式电子门锁离合器 | |
| CN201627410U (zh) | 改进结构的智能锁 | |
| CN201843413U (zh) | 三向锁紧装置及其采用电控操作的三向锁栓电控半自动锁 | |
| CN207212095U (zh) | 一种内摆门驱动装置 | |
| CN202689691U (zh) | 门锁 | |
| CN214943204U (zh) | 门锁 | |
| CN110847712B (zh) | 一种智能门锁 | |
| CN208267557U (zh) | 一种指纹锁 | |
| CN203201300U (zh) | 一种插芯锁的防撬结构 | |
| CN211008040U (zh) | 一种副锁舌机构 | |
| CN208251854U (zh) | 一种门锁 | |
| CN208441645U (zh) | 一种全自动电机驱动锁体结构 | |
| CN202125129U (zh) | 带空转插芯式电控门锁锁芯装置 | |
| CN102071839B (zh) | 一种电机锁 | |
| CN203081082U (zh) | 一种两个环形锁舌的防盗锁 | |
| CN202324893U (zh) | 一种自动插芯锁 | |
| CN201581714U (zh) | 机电一体型遥控防盗锁 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| C14 | Grant of patent or utility model | ||
| GR01 | Patent grant | ||
| C17 | Cessation of patent right | ||
| CF01 | Termination of patent right due to non-payment of annual fee |
Granted publication date: 20110323 Termination date: 20130914 |