CN1202543C - 用于驱动和控制电开关装置的操作设备 - Google Patents
用于驱动和控制电开关装置的操作设备 Download PDFInfo
- Publication number
- CN1202543C CN1202543C CNB988143984A CN98814398A CN1202543C CN 1202543 C CN1202543 C CN 1202543C CN B988143984 A CNB988143984 A CN B988143984A CN 98814398 A CN98814398 A CN 98814398A CN 1202543 C CN1202543 C CN 1202543C
- Authority
- CN
- China
- Prior art keywords
- current collector
- operating equipment
- turning motor
- information
- motor
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Lifetime
Links
Images

Classifications
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01H—ELECTRIC SWITCHES; RELAYS; SELECTORS; EMERGENCY PROTECTIVE DEVICES
- H01H33/00—High-tension or heavy-current switches with arc-extinguishing or arc-preventing means
- H01H33/02—Details
- H01H33/28—Power arrangements internal to the switch for operating the driving mechanism
- H01H33/36—Power arrangements internal to the switch for operating the driving mechanism using dynamo-electric motor
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01H—ELECTRIC SWITCHES; RELAYS; SELECTORS; EMERGENCY PROTECTIVE DEVICES
- H01H3/00—Mechanisms for operating contacts
- H01H3/22—Power arrangements internal to the switch for operating the driving mechanism
- H01H3/26—Power arrangements internal to the switch for operating the driving mechanism using dynamo-electric motor
- H01H2003/266—Power arrangements internal to the switch for operating the driving mechanism using dynamo-electric motor having control circuits for motor operating switches, e.g. controlling the opening or closing speed of the contacts
Abstract
本发明涉及用于驱动和控制高压或中等电压开关装置,诸如开关或电路断流器,的打开和闭合的操作设备。操作设备包括在运行时被连接到开关装置的移动触点(203)的旋转电动机(201)。旋转电动机(201)在接收到来自控制单元(205)的控制信号(208)后,通过机械联轴节(202)操作移动触点。旋转电动机(201)在移动触点(203)进行减速运动时可以把移动触点(203)的动能转换成电能,该电能可被传送到适当的能量贮存或供给单元(204)。按照本发明的操作设备特别适合于操作所有类型的电路断流器。
Description
技术领域
本发明涉及用于驱动和控制电开关装置,诸如开关或电路断流器,的打开和闭合的操作设备。所述的开关装置是指在高压或中等电压传输或分布网中被使用的,因此被使用在从1千伏到几百千伏的电压。操作设备特别适合于操纵所有类型的电路断流器,例如,活动槽或固定槽类型的气体、油或真空隔离的电路断流器。本发明也涉及由上述类型的操作设备操纵的中等电压或高压开关装置,以及用于操纵中等电压或高压开关装置的方法。
背景技术
在电力传输或分布网中,开关装置被引入到网络中,以便响应于异常负载条件提供自动保护,或允许网络的各个部分的打开或闭合(开关)。开关装置所以可被用来执行多种不同的操作,诸如终端故障中断或线路短路中断,小的感性电流中断,容性电流中断,不同相切换或无负载切换,所有这些操作都是本领域技术人员熟知的。
在开关装置中,实际的打开或闭合操作由两个触点实现,其中通常一个触点是静止的,另一个触点是移动的。移动触点由包括致动器和机械装置的操作设备操纵,其中所述机械装置用来把致动器连接到移动触点。
用于中等的和高的电压开关与电路断流器的已知的操作设备的致动器是弹簧操作的、液压类型或电磁类型的。下面,将描述操作设备操纵操作设备,但类似的已知的操作设备也可以操纵开关。
弹簧作用的致动器通常使用两个用于操纵电路断流器的弹簧:一个用于打开电路断流器的打开弹簧和一个用于闭合电路断流器与重新装载打开弹簧的的闭合弹簧。闭合弹簧由位于操作设备中的电动机重新加载。机械装置把弹簧的运动变换成移动触点的平移运动。在它在网络中的闭合的位置时,电路断流器的移动触点与静止触点互相接触,以及操作设备的打开弹簧与闭合弹簧被加载。在打开命令后,打开弹簧断开电路断流器,使两个触点分开。在闭合命令后,闭合弹簧闭合电路断流器,同时使得打开弹簧加载。现在打开弹簧准备好执行第二次打开操作,如果必要的话。当闭合弹簧闭合电路断流器时,在操作设备中的电动机重新加载闭合弹簧。这种重新加载操作花费几秒钟。
虽然实现了它们被赋予的任务,但弹簧操作的操作设备有几个缺点。移动触点的运动唯一地由打开和闭合弹簧与操作机械装置的特性决定。所以,作为时间的函数的移动触点走过的距离,即,移动触点动作的运动图案,不能由用户改变,因为它是在设计操作设备后被确定的。这意味着,一旦打开弹簧或闭合弹簧被释放,移动触点就将遵循预定的运动图案。另外,由致动器提供给移动触点的能量在设计操作设备后被确定。所以不可能调整移动触点的运动使得它适合于需要执行的打开或闭合操作的类型。一旦开始打开或闭合运行,也不可能通过控制所述触点的速度或加速度来改变移动触点的运动。
另外,由于存在弹簧,弹簧作用的致动器固有地精度很差,因为它们通常包括大量元件。大量元件也需要操作设备的初始调整,这是复杂的,从而是费时的。在定位移动触点时的差的精度和缺乏对移动触点运动的控制,可能进一步需要有阻尼器或减震器,来耗散在打开和闭合撞击结尾时剩余的动能,以及阻止电路断流器以无控制的方式撞击。另一个缺点是已知的弹簧操作的操作设备的、高的噪声电平,这可能要求在操作设备的房子中安装隔声装置,以便限制环境影响。由于有很多数目的元件,已知的弹簧作用的操作设备需要常规的维护,来保持操作设备的预期的特性,以及补偿由于系统的磨损和老化引起的移动触点运动的变化。再一个问题是由电路断流器的延时给出的,即,在发送操作命令到操作设备的时刻与电流断路器的移动触点运动的开始时刻之间的时间滞后。由于有很多数目的元件,在已知的弹簧作用的操作设备中的响应时间是几毫秒(ms)的量级。
液压类型的操作设备,其中移动触点的运动由特定的液压致动器完成的,会具体地避免弹簧操作的操作设备的某些不方便性,无论如何,液压操作设备具有与存在液压流体有关的某些缺点,特别是由于液体粘滞度是温度敏感的。另外,对于液压操作设备,有泄漏的危险,由此液压流体可能对环境有影响。与弹簧作用的操作设备一样,液压操作设备产生高的噪声电平,以及也需要常规的维护,保持操作设备的预期的特性。
在已知的电磁操作设备中,作用力由洛伦兹力原理或通过由电磁产生的互动磁场产生。
洛伦兹力说明,如果载有电流的导体被放置在磁场中,则有一个力作用在导体上。这个原理被使用于操作真空电路断流器的话音线圈致动器。在专利申请PCT/US96/07114中描述了这样的话音线圈。然而,话音线圈有一个主要缺点:撞击的长度被限制。话音线圈致动器的使用因此被限制于只需要短的撞击的开关和电路断流器。
磁操作设备利用一个或多个电磁铁来操作电路断流器的移动触点。存在磁操作设备的几种设计方案,其作用原理在于,运行时与移动触点相连接的电磁铁在两个末端位置之间移动,由此磁路中的空气隙被闭合或放大。这样的设备的一个例子,如在PCT专利申请PCT/SE96/01341中给出的,在下面将参照图1进行描述。电路断流器的移动触点运行时与旋转装置101相连接,包括多个旋转对称地布置的电枢。旋转装置101被安排在外部的静止铁心102中。为了达到旋转运动,被固定在每个电枢处的铁心102中的工作线圈103,被馈入工作电流,由此旋转装置101可以在两个末端位置之间旋转,其中电枢的电磁极面形成为与铁心102的极面相接触。在旋转运动期间,在电枢中的臂状凸出物将运动到工作线圈103中,由此位于极面之间的空气隙被闭合或被放大。
为了得到足够的撞击,在磁操作设备中的空气隙必须很大。由于大的空气隙导致高的磁化能量,操纵电磁操作设备所需要的能量很大,因为大的空气隙需要被磁化,延迟时间很长。另外,正如话音致动器的情形那样,电枢只能在两个末端位置之间运动,以及撞击的长度因此固有地被限制。
致动器传递到移动触点的能量等于由致动器产生的力乘以致动器的撞击,或在旋转致动器的情形下,是转矩乘以角运动。在已知的电磁致动器中,撞击或角度运动固有地被限制,因为运动具有末端位置。因此,为了已知的致动器能够传递足够的能量到移动触点,“每次运动的力”必须非常大。这使得已知的电磁致动器是大的,笨重和昂贵的,特别是当需要传递大的能量到移动触点时,正如在高压电路断流器应用项的情形下。即使机械联轴节包括带有适当的传动比的齿轮装置,但机械联轴节也不能改变这个事实。
发明内容
本发明的主要目的是提供在高压和中等电压传输或分布网络中、用于驱动和控制开关装置的打开和闭合的操作设备,它使得开关装置的移动触点能够以快速和可控制的方式进行长的撞击。
本发明的另一个目的是提供一个操作设备,它在移动触点减速运动后能够馈送能量到能量贮存单元。
本发明的再一个目的是提供一个操作设备,借助于该操作设备移动触点能够按照给定的想要的运动图案移动,以及该运动图案在很大数目的打开和闭合操作期间被保持。在这个目的方面,操作设备可补偿老化和磨损,以免改变运动图案。
本发明的再一个目的是提供一个操作设备,借助于该操作设备,移动触点能够按照任何多个独特的运动图案移动。
本发明的再一个目的是提供一个操作设备,借助于该操作设备,在打开或闭合操作期间,移动触点的速度可被连续地控制。
本发明的再一个目的是提供一个操作设备,该操作设备比起已知的操作设备,在机械上更简单,以及是可靠的,具有相当简单的结构和低的制造成本。
根据本发明的一个方面,提供了一种用于快速操纵具有至少一个移动触点的中等电压或高压的开关装置的操作设备,包括在运行时被连接到至少一个移动触点的旋转电动机,以及电能供给单元,其特征在于操作设备包括控制单元,以及运行周期包括其中移动触点通过把电能转换成机械能而被加速的第一部分和其中移动触点通过把机械能转换成电能用于贮存到能量供给单元而被减速的第二部分。“运行时连接到”被理解为,旋转的电动机不用任何中间的能量存储装置(诸如机械弹簧)而被连接到移动触点。
根据本发明的另一方面,提供了一种用于快速打开或闭合具有至少一个移动触点的中等电压或高压的开关装置的运动的方法,以及操作设备包括在运行时被连接到至少一个移动触点的旋转电动机,以及电能供给单元,其特征在于,在运动的第一部分下通过把电能转换成机械能而加速可移动的触点,在运动的第二部分下通过把机械能转换成电能而减速可移动的触点,以及把转换的电能存储到能量供给单元。
“旋转电动机”被理解为任何类型的、能够进行无尽的旋转运动的旋转的电动装置。与具有最终位置的已知的致动器相比较,旋转电动装置可以旋转很多的甚至无穷的圈数,以及只旋转一圈的一部分。由于无限制的角度运动,旋转电动机能够提供一个只是由旋转电动机与移动触点之间的连接的设计所限制的、移动触点的撞击长度。
对于按照本发明的操作设备,有可能通过控制流过旋转电动机的工作电流来控制移动触点的运动。因此,移动触点的运动方向和速度可被控制。
按照本发明的一个实施例,旋转电动机运行时通过包括具有适当的传动比的齿轮装置的机械联轴节被连接到移动触点。通过这样的连接,有可能通过在每次打开或闭合操作时使得旋转电动机旋转一圈或多圈,而转换用于角运动的致动器转矩。通过利用齿轮装置的减速传动角运动,所需要的致动器转矩可被减小,由此致动器的尺寸和成本都可减小。当然,对于旋转电动机,也有可能操作只利用一圈的一部分的移动触点,即,通过使得旋转电动机只旋转一圈的一部分,来操作移动触点。
优选地,机械联轴节把旋转电动机的旋转运动变换成移动触点的横向运动,但机械联轴节可替换地把旋转电动机的旋转运动变换成移动触点的旋转运动。
按照本发明的另一个实施例,旋转电动机直接操作移动触点,即移动触点被直接连接到旋转电动机的旋转轴。
按照本发明的再一个实施例,旋转电动机包括多个在运行时被连接到移动触点的旋转电动机。
按照本发明的再一个实施例,旋转电动机可作为发电机以及致动器运行。当运行时,移动触点一开始被加速。在这个加速阶段期间,旋转电动机作为致动器运行,对移动触点加速。在接近撞击的末尾时,移动触点进入减速阶段,这时移动触点被减速。在这个减速阶段期间,旋转电动机作为发电机运行,由此旋转电动机在移动触点减速运动时通过把移动触点的动能转换成电能而产生电能。
通过把旋转电动机作为发电机运行而使移动触点减速,可以得到许多好处。首先,由旋转电动机产生的电能可被传送到能量贮存单元,例如电池,电容器组,超级电容器组,或电网。因此,电能可被使用来在以后的加速阶段期间加速移动触点。由此,可以减小对于运行移动触点所需要的总的能量。优选地,能量贮存单元是操作设备通常由此接收能量来加速移动触点的同一个能量供给单元。第二,通过这样地减速移动触点,避免对于机械阻尼器的需要。由此,操作设备的机械设计可被简化。第三,在减速阶段期间移动触点的运动可以以一种通过使用已知的机械阻尼器而不可能进行的方式被控制。
代替存储由能量贮存单元中的旋转电动机产生的电能,电能可被耗散在欧姆装置上,由此移动触点的动能被变换成热。
加速阶段不必立即紧跟在减速阶段的后面。可以有一个中间阶段跟随在加速阶段后面而在减速阶段的前面,这时移动触点既不被加速也不被减速,而是由于它的惯性力而继续运动。
按照本发明的一个实施例,旋转电动机的运动由控制单元控制。控制单元控制流过旋转电动机的工作电流,由此移动触点的运动被控制单元控制。借助于控制单元,移动触点可以以高的精度被操纵,以及可以容易得到移动触点的想要的运动。例如,通过利用控制单元,磨损和老化对移动触点的运动的影响可被补偿。
按照本发明的另一个实施例,控制单元包括数据处理装置,诸如中央处理器(CPU),和数据贮存装置,它能够存储多个独特的运动图案。优选地,对于在电网中可能出现的每种类型的打开/闭合情形的一个运动图案被存储在数据贮存装置中。来自诸如设备变换器那样的监视装置的、关于电网的条件的信息或来自操作者的指令,被提供给控制单元。当开关装置被要求来运行时,该信息和或指令被数据处理装置分析。根据分析,从被存储在数据贮存装置的运动图案中选择适当的运动图案,以及旋转电动机被做成按照所选择的运动图案操纵移动触点。这样,当需要特定的切换运行时,操作设备可以提供带有适合于特定类型的网络条件的运动图案的切换运行。
按照本发明的再一个实施例,控制单元在打开或闭合运行期间,连续地控制旋转电动机的角速度。由此,移动触点的速度和加速度在打开或闭合运行期间可以连续地改变。被发送到旋转电动机的控制电流通过利用在数据处理装置中执行的算法而被控制。加到算法的适当的输入是来自操作者的信息,总的关于电网的信息,例如,来自被策略地放置的设备变换器的电压和电流数值,或关于开关装置的信息,例如流过开关装置的的电流,在移动触点与静止触点之间的电压,或在开关装置是电路断流器的情况下的电弧电压。加到算法的其它适当的输入是关于旋转电动机和或移动触点的位置、速度和加速度的信息。这样的信息可以由被放置在旋转电动机和移动触点上的位置与运动传感器,通过反馈环被提供给控制单元。
从以下的说明中将明白本发明的进一步的特性和优点。
附图说明
下面,将参照附图描述本发明,其中
图1显示已知的磁致动器的示意图;
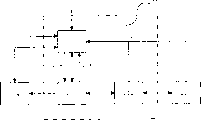
图2显示按照本发明的一个实施例的操作设备的方框图;以及
图3示意性显示按照本发明的开关装置的旋转电动机的示意图。
具体实施方式
在图2上显示了按照本发明的操作设备的一个实施例的方框图。操作设备200包括旋转电动机201,它通过机械联轴节在运行时连接到开关装置的移动触点203。机械联轴节202把旋转电动机201的旋转运动转换成移动触点203的平移运动。机械联轴节202包括齿轮装置,它通过使用适当的传动比减速传动旋转电动机的角运动。旋转电动机由能量供给单元204通过控制单元205被提供能量。能量供给单元可以是网络,电池,电容器组,超级电容器组或某些其它类型的能量供给装置。控制单元205,包括数据处理装置和数据贮存装置,通过发送控制电流208到旋转电动机201而控制它的运动。操作设备包括一些装置,借助于这些装置,来自诸如设备变换器那样的监视装置的、关于电网状况的信息210或来自操作者的指令209,通过控制单元被传送到控制单元。关于旋转电动机201的位置、加速度、转矩和或角速度的信息通过第一反馈环206被传送到控制单元205。另外,关于旋转电动机202的位置、加速度、转矩和或角速度的信息通过第二反馈环207被传送到控制单元205。
借助于控制单元205,有可能以简单的和灵活的方式控制移动触点的运动作为网络的条件的函数(例如,无负载切换,感性/容性负载的切换,不同类型短路故障的中断等等)。也有可能在运行以前,设置移动触点移动应当达到的精度。由此,到达撞击末尾的位置的风险可被减小。另外,借助于控制单元205和反馈环206,207,有可能补偿由于磨损和老化造成的系统的摩擦力的改变。这可以通过编程移动触点的运动作为反馈信息的函数进行改变而达到。可替换地,这可以通过编程移动触点的运动作为操作的时间或次数的函数进行改变而达到,在这种情况下不需要反馈环。
当运行时,移动触点203一开始被加速。在这个加速阶段期间,旋转电动机201作为致动器运行,对移动触点203加速。取决于想要的运动图案,加速阶段后面跟随中间阶段,这时旋转电动机201不驱动移动触点203,但这时移动触点203由于惯性力作用而继续运动。在接近撞击的结尾时,移动触点203进入减速阶段,这时移动触点被减速。在这个减速阶段期间,旋转电动机201作为发电机运行,由此移动触点203的动能被转换成电能,该电能直接或通过控制单元205被传送回能量供给单元204或能量贮存单元。这在图2上由双头箭头和从旋转电动机203到能量供给单元204的虚线箭头表示。可替换地,电能可被耗散在欧姆装置中,由此移动触点的动能被变换成热量。通过这样地减速移动触点,避免了对于机械阻尼器的需要。
借助于控制单元205,加速阶段、中间阶段和加速阶段的持续时间可被详细地控制。在某些打开或闭合运行中,例如,中间阶段可被排除,由此加速阶段后面立即跟随减速阶段。在其它运行中,有两个或多个加速阶段和/或由中间阶段分开的减速阶段。
旋转电动机201可以是任何类型的传统的旋转电动机,诸如步进电动机,感应型交流(AC)电动机或同步型AC电动机,诸如磁阻电动机,直流(DC)电动机,AC或DC永久磁铁电动机。通过使用“过时的”传统旋转电动机,按照本发明的操作设备可被做得非常便宜。然而,为了满足某些开关应用的严格的要求,特别是在高压电路电路断流器中,传统的电动机必须以特定的方式被操纵。这将在下面说明。
外观上类似于按照本发明的操作设备的一种设备是用来操作断路器的传统的电动机。断路器是一种电气装置,它在打开的位置时在电网中提供隔离的距离。断路器能够切换可忽略的电流,例如,具有数值≤0.5安(A)的电流,但与如开关和电路断流器那样的开关装置相比较,它不能切换或中断在电网中在正常或异常条件下出现的负载电流。开关必须至少能够切换或中断在电网中在正常或异常条件下出现的负载电流。此外,电路断流器必须至少能够切换或中断在规定的异常条件下,(例如终端故障,线路短路故障,不同相切换,小的感性电流的中断和容性电流的切换)出现的负载电流,所有这些所述故障类型对于本领域技术人员是熟知的。所有的故障类型要求电路断流器在检测到故障以后马上快速运行。这样,在中等电压和高压开关装置应用项中,需要在非常短的时间间隔内执行大量机械工作。虽然电动机操纵的断路器的打开或闭合运行花费几秒钟,但开关装置的打开/闭合运行必须在几毫秒(ms)内完成。例如,在高压电路断流器应用项中,操作设备可能必须能够在15ms时间间隔内传递多到每极2000焦耳到电路断流器。所以,对操纵断路器的操作设备的要求无论如何不能与对操纵开关或电路断流器的操作设备的要求相比较。
在传统的应用中的传统电动机通常不能在小于0.5ms的时间间隔内进行操纵。在传统的应用中的传统电动机也不能在电枢绕组中以超过5-10A/mm2的电流密度进行操纵。如果这样的话,电动机由于绕组中的电流产生的热量而会被损坏。然而,在按照本发明的操作设备中的旋转电动机中,使用超过50-200A/mm2的电枢绕组电流密度,因为这些电流密度是对于满足操纵开关装置的操作设备的要求所需要的。在按照本发明的开关装置中有可能使用传统的旋转电动机,因为旋转电动机决不必须在长于40-60ms的时间间隔内运行。优选地,无论如何,按照本发明的开关装置中的旋转电动机,可以按照下面的方式被调整。
为了说明对按照本发明的操作设备的要求,下面将给出在操作设备的打开或闭合运行时作用在旋转电动机上的作用力的多少简化的理论说明。参照图3给出这个说明,其中使用以下符号表示:
J [kgm2] 代表移动触点的圆盘的惯量距
Jm [kgm2] 代表旋转电动机的转子的惯量距
f [N/m2] 转子的恒定的表面力密度
R [m] 转子的半径
l [m] 转子的长度
ρ [kg/m3] 转子的密度
φ [rad] 转子的旋转角度
θ [rad] 圆盘的旋转角度
μm [Nm] 由旋转电动机产生的恒定的转矩
μ [Nm] 作用在代表开关装置的圆盘上的恒定的转矩
E [J] 在时间t被传送到代表移动触点的圆盘的能量
J (焦耳)
m (米)
s (秒)
N (牛顿)
kg (千克)
rad (弧度)
图3示意性显示通过包括具有1∶α的传动比的齿轮装置的动能联轴节301来操纵开关装置的旋转电动机的图。旋转电动机由圆柱形状的转子302示意地表示。转子具有半径R,长度l和密度ρ。转子的惯量矩量是:
假定一个恒定转矩,由旋转电动机产生的转矩是:
μm=2πR2lf (2)
这里,F是在切线方向上、作用在转子表面上的表面力密度。开关装置由圆盘303示意地表示,以及通过旋转圆盘303操纵开关装置的移动触点。圆盘303具有J的惯量矩量,它代表开关装置的旋转电动机的惯量矩量。机械联轴节301的惯量矩量与圆盘303的惯量矩量J结合在一起。
假设转子302的旋转角是φ,以及圆盘的旋转角是θ,圆盘303的加速度由以下方程控制:

转子302的加速度由以下方程控制:

这里在θ和φ上面的两个点表示“它们的二次时间导数”以及φ上面的单个点表示“它的一次时间导数”。
为了简化起见,假设由转子302传递的所有的能量被转换成圆盘303的动能。然后被传送到旋转圆盘的能量是:

把它代入公式(8),产生:
由于在开根号符号下面的表示式必须等于或大于0,必须满足:
方程(13)因此给出对于在时间间隔t内传递能量E到移动触点所需要的转子的最小恒定的表面力密度。
对于典型的大的高压电路断流器,移动触点必须在15ms的时间间隔内得到大约9m/s的速度。因此,给定移动触点的质量约为20kg后,被存储在移动触点(圆盘)中的能量约为:
假设转子具有20cm的长度和7900g/cm3的密度(磁离子),对于在15ms中把三磁极高压电路断流器的移动触点加速到9m/s所需要的最小表面力密度按照方程(13)大约为:
应当指出,操纵断路器的电动机的需要的表面力密度比0.4N/mm2低得多。
传统应用项中的传统电动机,诸如操纵断路器的电动机,只能产生0.05N/mm2的量级的表面力密度。这是因为传统应用项中的传统电动机必须被设计成在长于1秒的时间间隔内运行,以及该热设计准则要求电枢电负载不超过100A/cm。
对于能够产生给定的表面力密度的电动机,如果转子的长度增加,由电动机产生的能量可被增加。在表1中,显示了对于操纵不同的尺寸的电路断流器所需要的近似能量值,连同对于产生这些能量所需要的转子长度l,假定传统的电动机能够产生0.05N/m2的表面力。转子长度可以通过使用公式(13)和假定运行的时间间隔t是15ms,被估值。表1上也显示在假定旋转电动机的转子不长于0.2时所需要产生的表面力f。
| 36kV | 145kV | 245kV | ||||
| 单磁极 | 三磁极 | 单磁极 | 三磁极 | 单磁极 | 三磁极 | |
| E[J] | 30 | 100 | 200 | 600 | 800 | 2500 |
| l[m](假定f=0.05N/mm2) | 0.1 | 0.5 | 1.0 | 2.7 | 3.6 | 11.2 |
| f[N/mm2](假定l=0.2m) | 0.04 | 0.07 | 0.11 | 0.18 | 0.21 | 0.37 |
表1
正如在表1上看到的,直到36kV,理论上有可能使用传统的电动机来操纵电路断流器。然而,在具有超过36kV的标称电压的电网中,在理论上或在经济上不可能使用这样的电动机,因为转子需要非常长。正如在表1上看到的,公式13产生:具有0.2m的转子长度的旋转电动机需要产生量级为0.4N/mm2的表面力,以便能够在15秒内提供2500J给电路断流器。对于甚至更大的电路断流器,可能需要高达o.5N/mm2的表面力。所以,被包括在按照本发明的操作设备中的旋转电动机的表面力应当是在0.05-0.5N/mm2的范围内,优选地为0.05-0.75N/mm2。
在被包括在按照本发明的操作设备中的旋转电动机中,有可能得到量级为0.5N/mm2的表面力密度,因为该装置不需要在超过1秒的时间间隔内被操作。这意味着,旋转电动机可被设计为不必考虑热设计准则,因此,在这样的机械中可以允许高达5000A/cm的电流片密度,它高于在传统的应用项中的传统的电动机中可允许的量。通过增加电流片密度,表面力密度可以增加到对于操纵开关或电路断流器所需要的数值。所以,被包括在按照本发明的操作设备中的旋转电动机的电流片密度应当处在500-5000A/cm,优选地为500-15000A/cm。
将会看到,按照以上的加到,有可能作出本发明的许多修改方案和变例,而不背离本发明的精神和打算的范围。可以看到,按照本发明的操作设备可被使用来操纵具有三磁极以及单磁极的开关装置。
Claims (20)
1.用于快速操纵具有至少一个移动触点的中等电压或高压的开关装置的操作设备,包括在运行时被连接到至少一个移动触点(203,303)的旋转电动机(201,302),以及电能供给单元(204),其特征在于操作设备包括控制单元(205),以及运行周期包括其中移动触点通过把电能转换成机械能而被加速的第一部分和其中移动触点通过把机械能转换成电能用于贮存到能量供给单元(204)而被减速的第二部分。
2.按照权利要求1的操作设备,其特征在于,在第一部分与第二部分之间的时间内的运动包括中间部分,在这时移动触点(203,303)由于惯性力作用而继续它的运动。
3.按照权利要求1或2的操作设备,其特征在于,旋转电动机(201,302)是以下的任一种电机:感应型交流(AC)电动机或同步型AC电动机,直流(DC)电动机,AC永久磁铁电动机,DC永久磁铁电动机或步进电动机。
4.按照权利要求1或2的操作设备,其特征在于,旋转电动机(201,302)运行时通过机械联轴节(202,301)被连接到至少一个移动触点(203,303)。
5.按照权利要求4的操作设备,其特征在于,机械联轴节(202,301)包括齿轮装置。
6.按照权利要求1或2的操作设备,其特征在于,能量贮存或能量供给单元(204)是以下的任一种:网络,电池,电容器组或超级电容器组。
7.按照权利要求1或2的操作设备,其特征在于, 旋转电动机(201,302),在从所述控制单元(205)接收控制信号(208)后,操纵至少一个移动触点(203,303)。
8.按照权利要求7的操作设备,其特征在于,操作设备包括借以把关于电网的条件的信息(210)或来自操作者的信息(209)传送到控制单元(205)的装置。
9.按照权利要求1或2的操作设备,其特征在于,控制单元(205)包括数据贮存装置和数据处理装置。
10.按照权利要求9的操作设备,其特征在于,多种运动图案被存储在数据贮存装置,以及在打开或闭合运行后,由数据处理装置根据关于电网的条件的信息(210)选择适当的运动图案。
11.按照权利要求9的操作设备,其特征在于,关于旋转电动机(201,302)的位置、加速度、转矩和/或角速度的信息通过第一反馈环(208)被传送到控制单元(205)。
12.按照权利要求9的操作设备,其特征在于,关于移动触点(202)的位置、加速度和/或速度的信息通过第二反馈环(207)被传送到控制单元(205)。
13.按照权利要求11的操作设备,其特征在于,关于移动触点(202)的位置、加速度和/或速度的信息通过第二反馈环(207)被传送到控制单元(205)。
14.按照权利要求12的操作设备,其特征在于,旋转电动机的角速度在打开或闭合运行期间通过在数据处理装置中执行的算法被连续地控制,以及加到所述算法的输入是以下的任一项:
关于电网的条件的信息(210)或来自操作者的信息(209),
通过第一反馈环(208)被传送到控制单元(205)的、关于旋转电动机(201,302)的位置、加速度、转矩和/或角速度的信息,
通过第二反馈环(207)被传送到控制单元(205)的、关于移动触点(202)的位置、加速度和/或速度的信息。
15.按照权利要求13的操作设备,其特征在于,旋转电动机的角速度在打开或闭合运行期间通过在数据处理装置中执行的算法被连续地控制,以及加到所述算法的输入是以下的任一项:
关于电网的条件的信息(210)或来自操作者的信息(209),
通过第一反馈环(208)被传送到控制单元(205)的、关于旋转电动机(201,302)的位置、加速度、转矩和/或角速度的信息,
通过第二反馈环(207)被传送到控制单元(205)的、关于移动触点(202)的位置、加速度和/或速度的信息。
16.按照权利要求1或2的操作设备,其特征在于,旋转电动机(201,302)产生在0.05-0.75N/mm2范围内的表面力密度。
17.按照权利要求1或2的操作设备,其特征在于,旋转电动机(201,302)具有在500-15000A/cm范围内的电流片密度。
18.按照权利要求1或2的操作设备,其特征在于,旋转电动机(201,302)具有超过50-200A/mm2的电枢绕组电流密度。
19.用于快速打开或闭合具有至少一个移动触点的中等电压或高压的开关装置的运动的方法,以及操作设备(200)包括在运行时被连接到至少一个移动触点(203,303)的旋转电动机(201,302),以及电能供给单元(204),其特征在于,在运动的第一部分下通过把电能转换成机械能而加速可移动的触点,在运动的第二部分下通过把机械能转换成电能而减速可移动的触点,以及把转换的电能存储到能量供给单元。
20.按照权利要求18的方法,其特征在于,除了加速部分和减速部分以外,移动触点的运动还包括中间部分,在这时移动触点(203,303)由于惯性力作用而继续它的运动。
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/SE1998/002339 WO2000036621A1 (en) | 1998-12-16 | 1998-12-16 | Operating device for driving and controlling an electrical switching apparatus |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN1337051A CN1337051A (zh) | 2002-02-20 |
| CN1202543C true CN1202543C (zh) | 2005-05-18 |
Family
ID=20411905
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CNB988143984A Expired - Lifetime CN1202543C (zh) | 1998-12-16 | 1998-12-16 | 用于驱动和控制电开关装置的操作设备 |
Country Status (7)
| Country | Link |
|---|---|
| US (1) | US6713984B1 (zh) |
| EP (1) | EP1147531B1 (zh) |
| JP (1) | JP2002532842A (zh) |
| CN (1) | CN1202543C (zh) |
| AU (1) | AU2554399A (zh) |
| DE (1) | DE69830808T2 (zh) |
| WO (1) | WO2000036621A1 (zh) |
Families Citing this family (19)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| SE517028C2 (sv) * | 2000-08-28 | 2002-04-02 | Abb Ab | Elektrisk brytare, användning och förfarande samt en elektrisk anläggning innefattande en elektrisk brytare |
| US7151353B2 (en) | 2000-09-18 | 2006-12-19 | Abb Ab | Switching device |
| SE0003369D0 (sv) | 2000-09-18 | 2000-09-18 | Abb Ab | Elkopplare |
| SE520438C2 (sv) * | 2000-09-18 | 2003-07-08 | Abb Ab | Elkopplare metod och kontroll |
| JP3861832B2 (ja) | 2003-03-11 | 2006-12-27 | 株式会社日立製作所 | 開閉器 |
| SE0302430L (sv) * | 2003-09-11 | 2004-09-28 | Abb Research Ltd | Roterande elektrisk motor |
| DE102004002173A1 (de) * | 2004-01-15 | 2005-08-04 | Abb Technology Ag | Verfahren zur Untersuchung eines Leistungsschalters |
| EP1962310A1 (en) * | 2007-02-26 | 2008-08-27 | Kamstrup A/S | Power line switch device with piezo-electric actuation |
| DE102007041972B3 (de) * | 2007-08-31 | 2009-04-09 | Siemens Ag | Vorrichtung zur Steuerung eines motorisch angetriebenen Schalterantriebs für ein Schaltgerät mit intergrierter Steuereinheit |
| US20100304920A1 (en) * | 2009-05-28 | 2010-12-02 | Bernard Joseph Simon | Hybrid Assembly , A Hybrid Power-Train , And A Method For Operating A Selectively Movable Assembly |
| ES2447370T3 (es) * | 2009-12-29 | 2014-03-11 | Abb Technology Ag | Disyuntor de media tensión |
| CN103560039B (zh) * | 2013-11-16 | 2015-12-09 | 沈阳工业大学 | 一种高压断路器永磁凸极电机操动机构及控制方法 |
| FR3079341B1 (fr) * | 2018-03-23 | 2023-01-27 | Etna Ind | Actionneur electromecanique pour disjoncteur d'une installation electrique haute tension |
| DE102019112717A1 (de) * | 2019-05-15 | 2020-11-19 | Maschinenfabrik Reinhausen Gmbh | Antriebssystem für einen Schalter und ein Verfahren zum Antreiben eines Schalters |
| DE102019112711A1 (de) * | 2019-05-15 | 2020-11-19 | Maschinenfabrik Reinhausen Gmbh | Schalteranordnung mit antriebssystem und verfahren zum antreiben eines schalters |
| DE102019112715B3 (de) * | 2019-05-15 | 2020-10-01 | Maschinenfabrik Reinhausen Gmbh | Verfahren zum Durchführen einer Umschaltung eines Laststufenschalters mittels eines Antriebssystems und Antriebssystem für einen Laststufenschalter |
| DE102019112716A1 (de) * | 2019-05-15 | 2020-11-19 | Maschinenfabrik Reinhausen Gmbh | Antriebssystem für einen Schalter und ein Verfahren zum Antreiben eines Schalters |
| DE102019112710A1 (de) * | 2019-05-15 | 2020-11-19 | Maschinenfabrik Reinhausen Gmbh | Schalteranordnung mit antriebssystem |
| FR3108212B1 (fr) * | 2020-03-13 | 2023-04-14 | Schneider Electric Ind Sas | procédé de test de coupure de courant capacitif d’un disjoncteur |
Family Cites Families (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US3723922A (en) * | 1972-07-06 | 1973-03-27 | T Loewen | Split hub locking device |
| US4233858A (en) * | 1976-12-27 | 1980-11-18 | The Garrett Corporation | Flywheel drive system having a split electromechanical transmission |
| GB2062380A (en) * | 1979-10-26 | 1981-05-20 | Cableform Ltd | Regenerative braking systems for D.C. motors |
| US4912380A (en) * | 1989-02-28 | 1990-03-27 | Square D Company | Field installable electrical operator for a circuit breaker |
| FR2678597B1 (fr) * | 1991-07-03 | 1997-06-20 | Commissariat Energie Atomique | Verin electrique a systeme de conversion de mouvement rotation/translation et a recuperation d'energie. |
| US5319295A (en) * | 1991-11-26 | 1994-06-07 | Unico, Inc. | Digital current regulator |
| US5334919A (en) * | 1993-06-11 | 1994-08-02 | Cleaveland/Price Inc. | Motor control system having improved dynamic braking |
| DE19540777A1 (de) * | 1995-11-02 | 1997-05-07 | Asea Brown Boveri | Elektrisches Schaltgerät |
-
1998
- 1998-12-16 DE DE69830808T patent/DE69830808T2/de not_active Expired - Lifetime
- 1998-12-16 US US09/856,507 patent/US6713984B1/en not_active Expired - Lifetime
- 1998-12-16 JP JP2000588781A patent/JP2002532842A/ja active Pending
- 1998-12-16 AU AU25543/99A patent/AU2554399A/en not_active Abandoned
- 1998-12-16 WO PCT/SE1998/002339 patent/WO2000036621A1/en active IP Right Grant
- 1998-12-16 EP EP98966870A patent/EP1147531B1/en not_active Revoked
- 1998-12-16 CN CNB988143984A patent/CN1202543C/zh not_active Expired - Lifetime
Also Published As
| Publication number | Publication date |
|---|---|
| DE69830808T2 (de) | 2006-04-27 |
| CN1337051A (zh) | 2002-02-20 |
| EP1147531B1 (en) | 2005-07-06 |
| DE69830808D1 (de) | 2005-08-11 |
| JP2002532842A (ja) | 2002-10-02 |
| AU2554399A (en) | 2000-07-03 |
| WO2000036621A1 (en) | 2000-06-22 |
| EP1147531A1 (en) | 2001-10-24 |
| US6713984B1 (en) | 2004-03-30 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN1202543C (zh) | 用于驱动和控制电开关装置的操作设备 | |
| CN100552847C (zh) | 多点开关 | |
| EP1975960A1 (en) | A bistable magnetic actuator for circuit breakers with electronic drive circuit and method for operating said actuator | |
| CN102470759A (zh) | 电力机动车用电力供给装置 | |
| CN102790564A (zh) | 多速伺服系统及速度切换方法 | |
| CN203659728U (zh) | 高压断路器无刷线圈激磁直流电机操动机构 | |
| US6388352B1 (en) | Magnetically actuated rotary apparatus | |
| CN106783258A (zh) | 开关装置及使用该装置的快速开关 | |
| EP1906423A1 (en) | A drive system | |
| KR20110098813A (ko) | 전기 장치 작동용 구동 시스템 | |
| CN105990949B (zh) | 电池飞轮综合储能装置 | |
| KR101049387B1 (ko) | 전기 부품을 작동시키기 위한 회전 전기 모터 | |
| CN201556538U (zh) | 开关设备用的永磁控制器 | |
| CN102055292A (zh) | 一种可重构的感应以同步的马达 | |
| CN103956278A (zh) | 用于高压开关配电设备的操作机构 | |
| CN201966082U (zh) | 一种外磁旋转式永磁机构 | |
| CN203787302U (zh) | 用于高压开关配电设备的操作机构 | |
| CN103560056A (zh) | 高压断路器无刷线圈激磁直流电机操动机构 | |
| CN101447362A (zh) | 高压断路器永磁摆角电机操动机构 | |
| CN102683056A (zh) | 一种外磁旋转式永磁机构 | |
| CN203423090U (zh) | 具有电压保护功能的智能环网柜 | |
| CN201364851Y (zh) | 一种高压断路器永磁摆角电机操动机构 | |
| CN107658157B (zh) | 用于核电厂设备鉴定测试中旋转操作的可控机电装置 | |
| CN201196928Y (zh) | 一种高压断路器横向磁场永磁直线电机操动机构 | |
| CN109687678B (zh) | 一种可实现反向加速的永磁调速系统 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| C06 | Publication | ||
| PB01 | Publication | ||
| C10 | Entry into substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| C14 | Grant of patent or utility model | ||
| GR01 | Patent grant | ||
| CX01 | Expiry of patent term | ||
| CX01 | Expiry of patent term |
Granted publication date: 20050518 |