CN114740887A - 一种可产生大角度偏转的飞行体偏转头控制方法及系统 - Google Patents
一种可产生大角度偏转的飞行体偏转头控制方法及系统 Download PDFInfo
- Publication number
- CN114740887A CN114740887A CN202210325541.6A CN202210325541A CN114740887A CN 114740887 A CN114740887 A CN 114740887A CN 202210325541 A CN202210325541 A CN 202210325541A CN 114740887 A CN114740887 A CN 114740887A
- Authority
- CN
- China
- Prior art keywords
- head
- deflection
- flying body
- angle
- support rods
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images






Classifications
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/10—Simultaneous control of position or course in three dimensions
- G05D1/101—Simultaneous control of position or course in three dimensions specially adapted for aircraft
Landscapes
- Engineering & Computer Science (AREA)
- Aviation & Aerospace Engineering (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Automation & Control Theory (AREA)
- Toys (AREA)
Abstract
本发明公开了一种可产生大角度偏转的飞行体偏转头控制方法及系统,基于四点支撑方法,采用四个支撑杆和一个万向节把飞行体的头部与主体相连,通过四个支撑杆的不同伸缩,使得飞行体的头部围绕万向节偏转,四个支撑杆不同的伸缩长度,可以使飞行体头部偏转到需要的方向,从而实现飞行体飞行轨迹的改变。根据四点支撑法原理,采用电机作为驱动元件设计出支撑杆的伸缩驱动机构。本发明可以在较大范围内实现不同角度的偏转,满足飞行体较高机动飞行要求。该控制系统具有机械机构简单、重量轻、成本低等特点,特别适用于飞行环境复杂且需要低成本驱动控制系统的飞行体设计要求,具备较广的适用范围。
Description
技术领域
本发明属于高速飞行控制技术领域,特别是一种应用于管式发射的高超音速制导炮弹、飞行体等飞行体的偏转头控制方法及系统。
背景技术
偏转头飞行控制为一种独特的控制策略,其通过在空气流中的飞行体整个头部的角度偏转,离开飞行体的中心线,在头部的迎风面和背风面产生不同的空气压力,从而产生控制力,操纵飞行体的飞行姿态,进而改变飞行轨迹,通过偏转头向任意方向偏转来完成飞行体任何方向的飞行路径改变。与目前采用的多舵面控制飞行体相比,在相同的配平攻角飞行情况下,具有高的法向力,更小的空气阻力和舵面偏转角度,而在飞行体的机动性、操纵性和稳定性间达到一个高性能的平衡。在不需要偏转控制时,头部可以回到中心和飞行体轴线一致的位置,由于不需要额外的复杂锁紧和张开机构,尤其适用于管射飞行体的飞行控制。
目前关于偏砖头控制系统的研究较少,已有的采用斜盘式、智能材料等方案的偏转头控制系统存在偏转角度较小(5度左右)、结构复杂、成本高等缺点,已不能满足大角度偏转和低成本的设计需求,随着偏转头飞行控制的进一步发展,急需针对性的开展适配的偏转头飞行控制系统。
发明内容
本发明的目的在于提供一种可产生大角度偏转的飞行体偏转头控制方法及系统,以实现飞行体在高速飞行情况下的高效控制。
实现本发明目的的技术解决方案为:
一种可产生大角度偏转的飞行体偏转头控制方法,基于四点支撑方法,采用四个支撑杆和一个万向节把飞行体头部与飞行体主体铰接,其中四个支撑杆的支撑点构成平行四边形,万向节位于平行四边形的中心,通过四个支撑杆的伸缩,使得飞行体头部围绕万向节偏转;
其中呈对角的一对支撑杆一个伸出长度△l,则另一个同步缩短长度△l,用于控制飞行体头部的俯仰角δy,呈对角的另一对支撑杆一个伸出长度△k,则另一个同步缩短长度△k,用于控制飞行体头部的偏角δz,四个支撑杆同时进行伸缩完成飞行体头部绕万向节的偏转;从而实现飞行体飞行轨迹的改变。
一种可产生大角度偏转的飞行体偏转头控制系统,包括控制单元、四个支撑杆和一个万向节,所述四个支撑杆和一个万向节连接于飞行体头部与飞行体主体之间;所述四个支撑杆的支撑点构成平行四边形,万向节位于平行四边形的中心;
所述控制单元用于控制四个支撑杆的伸缩,使得飞行体头部围绕万向节偏转:其中呈对角的一对支撑杆一个伸出长度△l,则另一个同步缩短长度△l,用于控制飞行体头部的俯仰角δy,呈对角的另一对支撑杆一个伸出长度△k,则另一个同步缩短长度△k,用于控制飞行体头部的偏角δz,四个支撑杆同时进行伸缩完成飞行体头部绕万向节的偏转;用于控制飞行体飞行轨迹的改变,当一个支撑杆完全缩进,呈对角的另一个支撑杆完全伸展,控制伸展的长度,从原理上可以实现近90度的偏转,从而实现较大范围的不同角度的偏转。
本发明与现有技术相比,其显著优点是:
(1)通过控制支撑杆的伸长或者缩短的长度大小,可以在较大范围(最大接近90度)内实现不同角度的偏转,满足飞行体较高机动飞行要求。
(2)偏转系统具有机械机构简单、重量轻、成本低等特点,特别适用于飞行环境复杂且需要低成本驱动控制系统的飞行体设计要求。
(3)该偏转系统通过采用不同功率电机和减速系统结合,能够实现不同扭矩的输出,可以用于大口径和小口径飞行体,具备较广的适用范围。
附图说明
图1为飞行体头部偏转角度示意图。
图2为支撑杆和偏转角度的关系图。
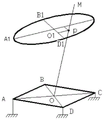
图3为四点支撑示意图。
图4为偏转第一步示意图。
图5为偏转第二步示意图。
图6为电动机机驱动机构示意图。
图7为头部偏转控制系统框图。
具体实施方式
下面结合附图及具体实施例对本发明做进一步的介绍。
本发明的一种可产生大角度偏转的飞行体偏转头控制方法,基于四点支撑方法,采用四个支撑杆和一个万向节把飞行体的头部与主体相连,通过四个支撑杆的不同伸缩,使得飞行体的头部围绕万向节偏转,四个支撑杆不同的伸缩长度,可以使飞行体头部偏转到需要的方向,从而实现飞行体飞行轨迹的改变。根据四点支撑法原理,采用电机作为驱动元件设计出支撑杆的伸缩驱动机构。
为了便于理解,如图1所示,以飞行体的弹体质点为坐标原点建立弹体坐标系,飞行器主体轴线为x轴,相垂直的径向分别为y轴和z轴,定义飞行体头部轴线与xoz平面的夹角δy为俯仰角,头部轴线在xoz平面的投影与x轴的夹角δz为偏角。则飞行体头部在空间的偏转角度可以由俯仰角δy和偏角δz表示。
利用四点支撑的对角两个支撑杆,一个伸长(缩短)、另一个的缩短(伸长)完成头部相对机身的俯仰角δy或偏航角δz(下面论述简称δy与δz)。一对支撑杆和头部偏转角度的关系如图2所示。
由图2可知,当一个支撑杆伸长△l,同时与其对称的一个支撑杆缩短△l,则连接两杆的水平杆围绕中间的支点旋转a角,其法线(图中带箭头的线)旋转b角,最终到达图中虚线的位置,角度和伸长的关系如下:

通过对角的两个支撑杆的伸长和缩短,则连接两个支撑杆的中间杆围绕着中间的支点旋转,其法线也围绕着支点旋转,如果以飞行体的头部安装在法线的位置,其对称轴与法线重合,则当两个支撑杆动作时,飞行体的头部围绕支点旋转,从而实现一个偏转角,两对支撑杆的联合,完成飞行体头部的在空间的偏转(δy和δz)。
为了详细的说明飞行体头部偏转一个角度的过程,把其偏转分为两个步骤,首先由一对对角支撑杆的伸长与缩短完成δy,然后由另外一对支撑杆完成δz。在实际的执行过程中,这两步是同时进行,最终体现为四个支撑杆的不同伸缩长度。
如图3所示,以ABCD面代表飞行体头部所在的支撑面(A、B、C、D四个点可理解为四个支撑杆分别与主体铰接点的位置),A1B1C1D1表示偏转头部时,头部轴线所扫过锥体的的一个截面,头部的任何一个偏转角度,其轴线都和A1B1C1D1有唯一对应交点,OO1M为飞行体头部轴线,O为万向节中心(位于ABCD面中心),O1为A1B1C1D1中心。p为飞行体头部处于某个偏转角时,头部轴线与A1B1C1D1的交点。
为了使得头部完成p点所示的偏转角度(δy和δz),分如下两步进行:
(1)如图4所示,A点支撑杆伸长Δl=Rtanδy,C支撑杆缩短Δl=Rtanδy,保持B、C长度不变,则OO1M围绕BOD旋转到达p1点,完成飞行体头部相对机身的俯仰角度δy。R为万向节与支撑杆的中心距。
(2)如图5所示,B支撑杆伸长Δk=Rtanδz,D支撑杆缩短Δk=Rtanδz,保持C、D支撑杆的长度不变,则OO1M围绕AOC旋转到达p点,完成飞行体头部相对机身的俯仰角度δz。
A1B1和C1D1把A1B1C1D1分成四个区域,飞行体头部在四个区域的偏转,其支撑杆的伸缩关系各不相同。
在A1O1B1区域,需要C杆伸长,A杆缩短,长度为Δl=Rtanδy;D杆伸长,B杆缩短长度为Δk=Rtanδz。同理,在A1O1D1区域,需要C、B杆伸长,A、D杆缩短;在C1O1B1区域,需要A、D杆伸长,C、B杆缩短;在C1O1D11区域,需要A、D杆伸长,C、B杆缩短。
两对对角支撑杆的不同伸缩长度,支持飞行体的头部围绕着万向节点偏转,所以四个支撑杆是驱动头部偏转执行机构的重要执行元件,实现四个支撑杆的伸长和缩短的驱动方式是十分关键的,需要其提供足够的效率和快的响应时间。
利用电动机机作为支撑杆的驱动元件在技术上没有难点,在工艺上也易于实现,特别是现有采用电动机作为驱动元件在各类飞行体上的运用已经比较成熟。
利用电动机作为驱动元件的飞行体头部偏转机构如图6所示,采用电动机驱动的飞行体头部偏转原理:通过安装在飞行体头部的传感器感知飞行体头部的当前位置,并传入计算机,与计算机内产生的要求的飞行体头部位置比较,产生偏差信号,计算机根据偏差信号产生电压,驱动电动机4转动,电动机4带动齿轮3,齿轮3带动齿条2伸长或缩短,从而使与齿条2连接的支撑杆1的伸长或者缩短,直到头部位置偏差信号消除,实现对头部的偏转。
支撑杆的伸长或者缩短量△k和驱动系统输出轴偏转角度θ、齿轮中径r有关,且△k=θr。
飞行体头部偏转控制系统通过驱动器驱动支撑杆,使四根支撑杆伸长或者缩短,支撑杆驱动飞行体的头部进行偏转,到达命令位置。如图7所示。
采用电动机作为驱动元件,则电动机的偏转首先转换为齿轮的转动,齿轮的转动再转换为齿条的伸缩(即支撑杆的伸缩),电动机的传递函数为G(s),齿轮的中径为r,则支撑杆和电动机的合成传递函数为:

其中 为飞行体头部偏转的俯仰角δy或偏角δz。
为飞行体头部偏转的俯仰角δy或偏角δz。
Claims (6)
1.一种可产生大角度偏转的飞行体偏转头控制方法,其特征在于,基于四点支撑方法,采用四个支撑杆和一个万向节把飞行体头部与飞行体主体铰接,其中四个支撑杆的支撑点构成平行四边形,万向节位于平行四边形的中心,通过四个支撑杆的伸缩,使得飞行体头部围绕万向节偏转;
其中呈对角的一对支撑杆一个伸出长度△l,则另一个同步缩短长度△l,用于控制飞行体头部的俯仰角δy,呈对角的另一对支撑杆一个伸出长度△k,则另一个同步缩短长度△k,用于控制飞行体头部的偏角δz,四个支撑杆同时进行伸缩完成飞行体头部绕万向节的偏转;从而实现飞行体飞行轨迹的改变。
2.根据权利要求1所述的可产生大角度偏转的飞行体偏转头控制方法,采用电动机作为支撑杆的伸缩驱动机构,通过安装在飞行体头部的传感器检测飞行体头部的当前位置,并传入计算机,与计算机内产生的要求的飞行体头部位置比较从而产生偏差信号,计算机根据偏差信号产生电压驱动电动机转动,电动机带动齿轮,齿轮带动齿条伸长或缩短,从而使与齿条连接的支撑杆伸长或者缩短,直到飞行体头部位置偏差信号消除,实现对头部的偏转。
3.根据权利要求2所述的可产生大角度偏转的飞行体偏转头控制方法,支撑杆和电动机的合成传递函数满足:

其中,电动机的传递函数为G(s),R为万向节与支撑杆的中心距, 为飞行体头部偏转的俯仰角或偏角;θ为电动机旋转角度。
为飞行体头部偏转的俯仰角或偏角;θ为电动机旋转角度。
4.一种可产生大角度偏转的飞行体偏转头控制系统,其特征在于,包括控制单元、四个支撑杆和一个万向节,所述四个支撑杆和一个万向节连接于飞行体头部与飞行体主体之间;所述四个支撑杆的支撑点构成平行四边形,万向节位于平行四边形的中心;
所述控制单元用于控制四个支撑杆的伸缩,使得飞行体头部围绕万向节偏转:其中呈对角的一对支撑杆一个伸出长度△l,则另一个同步缩短长度△l,用于控制飞行体头部的俯仰角δy,呈对角的另一对支撑杆一个伸出长度△k,则另一个同步缩短长度△k,用于控制飞行体头部的偏角δz,四个支撑杆同时进行伸缩完成飞行体头部绕万向节的偏转;用于控制飞行体飞行轨迹的改变,,当一个支撑杆完全缩进,呈对角的另一个支撑杆完全伸展,控制伸展的长度,从原理上可以实现近90度的偏转,从而实现较大范围的不同角度的偏转。
5.根据权利要求4所述的可产生大角度偏转的飞行体偏转头控制系统,其特征在于,四个支撑杆分别设有一个电机作为伸缩驱动机构,所述飞行体头部设有传感器,用于检测飞行体头部的当前位置;所述控制单元根据传感器检测的位置以及设定的位置比较从而产生偏差信号,并根据偏差信号产生电压驱动电动机转动,电动机带动支撑杆伸长或者缩短,直到飞行体头部位置偏差信号消除,实现对头部的偏转。
6.根据权利要求5所述的可产生大角度偏转的飞行体偏转头控制系统,其特征在于,支撑杆和电动机的合成传递函数满足:

其中,电动机的传递函数为G(s),R为万向节与支撑杆的中心距, 为飞行体头部偏转的俯仰角或偏角;θ为电动机旋转角度。
为飞行体头部偏转的俯仰角或偏角;θ为电动机旋转角度。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202210325541.6A CN114740887A (zh) | 2022-03-30 | 2022-03-30 | 一种可产生大角度偏转的飞行体偏转头控制方法及系统 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202210325541.6A CN114740887A (zh) | 2022-03-30 | 2022-03-30 | 一种可产生大角度偏转的飞行体偏转头控制方法及系统 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| CN114740887A true CN114740887A (zh) | 2022-07-12 |
Family
ID=82278532
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN202210325541.6A Pending CN114740887A (zh) | 2022-03-30 | 2022-03-30 | 一种可产生大角度偏转的飞行体偏转头控制方法及系统 |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN114740887A (zh) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN114987742A (zh) * | 2022-08-08 | 2022-09-02 | 陕西科技大学 | 一种飞行器头部偏转控制方法及结构 |
Citations (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| FR955594A (zh) * | 1950-01-17 | |||
| DE3031772A1 (de) * | 1980-08-22 | 1982-04-29 | Nikolaj Georgievič Bobovnikov | Vorrichtung zum schleifputzen von werkstueckrohlingen |
| CN104192311A (zh) * | 2014-08-28 | 2014-12-10 | 西北工业大学 | 一种锥齿轮推杆式飞行器头部偏转驱动装置 |
| CN207217741U (zh) * | 2017-10-13 | 2018-04-10 | 南京瑞安腾企业管理咨询有限公司 | 一种高通量卫星网络信号船载天线 |
| CN110154009A (zh) * | 2019-06-14 | 2019-08-23 | 李忠吉 | 一种生物仿生蛇形机器人 |
| CN111678386A (zh) * | 2020-07-03 | 2020-09-18 | 南京航空航天大学 | 一种飞行器头部偏转控制装置 |
| CN212783771U (zh) * | 2020-10-19 | 2021-03-23 | 盐城市星地通信设备有限公司 | 一种卫星天线角度偏转机构 |
| CN113772087A (zh) * | 2021-10-15 | 2021-12-10 | 南京理工大学 | 一种变后掠翼及头部偏转的变体飞行器 |
| CN114237295A (zh) * | 2021-12-20 | 2022-03-25 | 北京航空航天大学 | 一种高敏捷性空空导弹大迎角非常规飞行控制技术 |
-
2022
- 2022-03-30 CN CN202210325541.6A patent/CN114740887A/zh active Pending
Patent Citations (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| FR955594A (zh) * | 1950-01-17 | |||
| DE3031772A1 (de) * | 1980-08-22 | 1982-04-29 | Nikolaj Georgievič Bobovnikov | Vorrichtung zum schleifputzen von werkstueckrohlingen |
| CN104192311A (zh) * | 2014-08-28 | 2014-12-10 | 西北工业大学 | 一种锥齿轮推杆式飞行器头部偏转驱动装置 |
| CN207217741U (zh) * | 2017-10-13 | 2018-04-10 | 南京瑞安腾企业管理咨询有限公司 | 一种高通量卫星网络信号船载天线 |
| CN110154009A (zh) * | 2019-06-14 | 2019-08-23 | 李忠吉 | 一种生物仿生蛇形机器人 |
| CN111678386A (zh) * | 2020-07-03 | 2020-09-18 | 南京航空航天大学 | 一种飞行器头部偏转控制装置 |
| CN212783771U (zh) * | 2020-10-19 | 2021-03-23 | 盐城市星地通信设备有限公司 | 一种卫星天线角度偏转机构 |
| CN113772087A (zh) * | 2021-10-15 | 2021-12-10 | 南京理工大学 | 一种变后掠翼及头部偏转的变体飞行器 |
| CN114237295A (zh) * | 2021-12-20 | 2022-03-25 | 北京航空航天大学 | 一种高敏捷性空空导弹大迎角非常规飞行控制技术 |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN114987742A (zh) * | 2022-08-08 | 2022-09-02 | 陕西科技大学 | 一种飞行器头部偏转控制方法及结构 |
| CN114987742B (zh) * | 2022-08-08 | 2022-11-04 | 陕西科技大学 | 一种飞行器头部偏转控制方法及结构 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US7798443B2 (en) | Composite material for geometric morphing wing | |
| US8074925B2 (en) | Aircraft attitude control configuration | |
| US8418968B2 (en) | Mechanism for changing the shape of a control surface | |
| US12486019B2 (en) | Three-dimensional extension linkage for aircraft | |
| US5366176A (en) | Feedback-stabilized aerodynamically overbalanced lifting/control surface for aircraft | |
| US7195210B2 (en) | Fiber matrix for a geometric morphing wing | |
| US8434712B1 (en) | Methods and apparatus for driving rotational elements of a vehicle | |
| CN110160730A (zh) | 一种高速风洞中测试飞行器外挂物分离性能的装置及方法 | |
| US20250326499A1 (en) | System and method for adjusting forces on rotating body using aerodynamic means | |
| US11053003B2 (en) | Cyclorotor thrust control, transmission and mounting system | |
| CN104192311B (zh) | 一种锥齿轮推杆式飞行器头部偏转驱动装置 | |
| CN114740887A (zh) | 一种可产生大角度偏转的飞行体偏转头控制方法及系统 | |
| WO2024041584A1 (zh) | 一种飞行器旋转发射装置及系统 | |
| JPH09240599A (ja) | エンジンの推力調整によるロケットの制御方法 | |
| US8235329B1 (en) | Dynamically actuated adaptive control structures | |
| CN114987742B (zh) | 一种飞行器头部偏转控制方法及结构 | |
| US11345460B1 (en) | Rotatable empennage for an aircraft | |
| CN111412083B (zh) | 一种确定伺服作动器长度变化的方法 | |
| CN217456332U (zh) | 一种变形机翼装置、机翼及飞行设备 | |
| CN117566145A (zh) | 一种适用于狭小空间作业的飞行器 | |
| CN114572384A (zh) | 姿态可控模块单元、飞行器及姿态控制方法 | |
| CN119585175A (zh) | 多层摆向旋翼反作用力抗强风飞行器 | |
| CN115477006B (zh) | 一种双轴倾转矢量旋翼飞行器及其扰动补偿控制方法 | |
| CN117489491A (zh) | 一种喷管推力矢量控制装置 | |
| CN117262279B (zh) | 一种工字变体旋翼飞行器及动态重构控制方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination |