CN1140779C - 传递路径转矩传感器 - Google Patents
传递路径转矩传感器 Download PDFInfo
- Publication number
- CN1140779C CN1140779C CNB988123614A CN98812361A CN1140779C CN 1140779 C CN1140779 C CN 1140779C CN B988123614 A CNB988123614 A CN B988123614A CN 98812361 A CN98812361 A CN 98812361A CN 1140779 C CN1140779 C CN 1140779C
- Authority
- CN
- China
- Prior art keywords
- array
- torque
- grating
- sensor according
- torque sensor
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
- 230000005540 biological transmission Effects 0.000 title abstract description 4
- 230000008878 coupling Effects 0.000 claims abstract description 7
- 238000010168 coupling process Methods 0.000 claims abstract description 7
- 238000005859 coupling reaction Methods 0.000 claims abstract description 7
- 230000005670 electromagnetic radiation Effects 0.000 claims description 70
- 230000003287 optical effect Effects 0.000 claims description 50
- 238000012545 processing Methods 0.000 claims description 6
- 238000001259 photo etching Methods 0.000 claims description 5
- 239000011248 coating agent Substances 0.000 claims description 4
- 238000000576 coating method Methods 0.000 claims description 4
- 230000000694 effects Effects 0.000 claims description 4
- 239000002184 metal Substances 0.000 claims description 4
- 230000035945 sensitivity Effects 0.000 claims description 4
- 239000000126 substance Substances 0.000 claims description 4
- 239000011521 glass Substances 0.000 claims description 3
- 230000006978 adaptation Effects 0.000 claims description 2
- 238000007385 chemical modification Methods 0.000 claims description 2
- 238000003491 array Methods 0.000 description 21
- 238000000034 method Methods 0.000 description 20
- 238000006073 displacement reaction Methods 0.000 description 19
- 238000005516 engineering process Methods 0.000 description 10
- 230000007246 mechanism Effects 0.000 description 6
- 230000008859 change Effects 0.000 description 4
- 238000004519 manufacturing process Methods 0.000 description 4
- 230000008901 benefit Effects 0.000 description 3
- 238000010191 image analysis Methods 0.000 description 3
- 230000008569 process Effects 0.000 description 3
- 238000010586 diagram Methods 0.000 description 2
- 238000005259 measurement Methods 0.000 description 2
- 230000004048 modification Effects 0.000 description 2
- 238000012986 modification Methods 0.000 description 2
- XUIMIQQOPSSXEZ-UHFFFAOYSA-N Silicon Chemical compound [Si] XUIMIQQOPSSXEZ-UHFFFAOYSA-N 0.000 description 1
- 239000000654 additive Substances 0.000 description 1
- 230000000996 additive effect Effects 0.000 description 1
- 238000004040 coloring Methods 0.000 description 1
- 230000008021 deposition Effects 0.000 description 1
- 230000006866 deterioration Effects 0.000 description 1
- 238000009826 distribution Methods 0.000 description 1
- 238000005286 illumination Methods 0.000 description 1
- 238000003780 insertion Methods 0.000 description 1
- 230000037431 insertion Effects 0.000 description 1
- 239000011159 matrix material Substances 0.000 description 1
- 230000005012 migration Effects 0.000 description 1
- 238000013508 migration Methods 0.000 description 1
- 238000003909 pattern recognition Methods 0.000 description 1
- 229920002120 photoresistant polymer Polymers 0.000 description 1
- 229920006254 polymer film Polymers 0.000 description 1
- 229910052710 silicon Inorganic materials 0.000 description 1
- 239000010703 silicon Substances 0.000 description 1
- 238000012546 transfer Methods 0.000 description 1
- 238000002834 transmittance Methods 0.000 description 1
- 230000007306 turnover Effects 0.000 description 1
- 238000007740 vapor deposition Methods 0.000 description 1
Images








Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01L—MEASURING FORCE, STRESS, TORQUE, WORK, MECHANICAL POWER, MECHANICAL EFFICIENCY, OR FLUID PRESSURE
- G01L3/00—Measuring torque, work, mechanical power, or mechanical efficiency, in general
- G01L3/02—Rotary-transmission dynamometers
- G01L3/04—Rotary-transmission dynamometers wherein the torque-transmitting element comprises a torsionally-flexible shaft
- G01L3/08—Rotary-transmission dynamometers wherein the torque-transmitting element comprises a torsionally-flexible shaft involving optical means for indicating
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D6/00—Arrangements for automatically controlling steering depending on driving conditions sensed and responded to, e.g. control circuits
- B62D6/08—Arrangements for automatically controlling steering depending on driving conditions sensed and responded to, e.g. control circuits responsive only to driver input torque
- B62D6/10—Arrangements for automatically controlling steering depending on driving conditions sensed and responded to, e.g. control circuits responsive only to driver input torque characterised by means for sensing or determining torque
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01L—MEASURING FORCE, STRESS, TORQUE, WORK, MECHANICAL POWER, MECHANICAL EFFICIENCY, OR FLUID PRESSURE
- G01L3/00—Measuring torque, work, mechanical power, or mechanical efficiency, in general
- G01L3/02—Rotary-transmission dynamometers
- G01L3/04—Rotary-transmission dynamometers wherein the torque-transmitting element comprises a torsionally-flexible shaft
- G01L3/10—Rotary-transmission dynamometers wherein the torque-transmitting element comprises a torsionally-flexible shaft involving electric or magnetic means for indicating
- G01L3/12—Rotary-transmission dynamometers wherein the torque-transmitting element comprises a torsionally-flexible shaft involving electric or magnetic means for indicating involving photoelectric means
Abstract
一种转矩传感器包括具有通过扭转适应耦合(2)连接的第一和第二转矩输入部件(1a,1b)的转轴,从而能使转矩输入部件之间的相对角偏转作为轴转矩大小的函数。传感器具有EMR源(5,6)和阵列或EMR灵敏检测器(7,8)。每个转矩输入部件具有带交替的对EMR有高、低透射率区域的光栅带(101,102)。光栅带位于EMR从源传递到阵列的传递路径(90,91)。通过位于通向阵列的传递路径中的光栅带的交替的高、低透射率区域所造成阵列上的入射EMR产生图案。阵列上的图案经处理得出转矩部件的相对角偏转并提供轴转矩大小的量度。
Description
本发明涉及测量轴的转矩大小、尤其是车辆应用中的电力转向系统中存在的转轴转矩大小的转矩传感器。
电力转向系统通常包括输入轴元件,该元件经中间轴和接头装置连接到方向盘上。因此,输入轴通常需要在中心转向位置的两侧旋转一到两次转过一个角度。输入轴至少被转向齿轮的固定外壳部分包围。需要电力转向伺服系统准确测量该转轴连续变化的转矩。通常,加到轴上的转矩使其有角度地偏转,这种偏转使轴的一个部分相对于另一个部分有角度地位移,检测该位移以提供该转矩的量度。
检测装置需要允许轴在外壳内旋转,通常采用非接触或机械信号传递装置。非接触装置包括基于光学孔径的设备和磁设备,例如磁致伸缩或可变磁阻耦合。机械装置包括可滑动连接的电位计以及其他指示设备。
为了提高这种检测装置的准确性,在轴的两端用扭杆形式的扭转适应耦合来连接两个输入部件。当在两个输入部件之间施加转矩时,扭杆偏转导致角位移增加,这允许使用不太灵敏或不太准确的检测装置。
通常,使用扭杆需要使用防障机构,这种机构是一种转矩限制装置,用于在不可避免的转矩过载状态出现时防止扭杆出现故障。
这种转矩限制装置在车辆转向技术中是众所周知的,所以在本说明书中不再描述。
与本发明最接近的现有技术在美国专利US 5,369,583(Hazelden)和国际专利申请No.PCT/GB95/02017(Lucas Industries PLC)中已有描述,其中示出了采用测量转矩用的光盘孔的传感器。
本发明的实质在于提供多条电磁辐射(EMR)传递路径,这些路径包含由交替的高、低透射率区域组成的光栅带。光栅带处于通过扭转适应耦合连接的光栅元件中,只有一个光栅带处于任何一条传递路径中。
这些传递路径与电磁辐射(EMR)源相连接,电磁辐射(EMR)源通常是紫外线、可见光或红外光,它在通过光栅带时被调制。然后已调制的EMR在一个或多个对EMR敏感的检测器阵列上产生图案。阵列包括电荷耦合装置(CCD)、大规模集成电路(VLSI)视觉芯片、一维和二维光光检测器阵列和横向效应光电二极管(通常称为PSD或位置灵敏装置)。图案的分布是加到轴上的转矩的函数,可以对一个或多个阵列的输出进行处理以产生加到轴上的转矩量度。由于阵列尺寸的限制使得阵列不能在任何瞬时都能观察整个圆周或径向面,所以光栅带可以轴向或径向布置在轴的旋转轴线周围,其本质是允许阵列的连续输出而与轴的角位置无关。在美国专利US 5,369,583和国际专利申请No.PCT/GB95/02017中公开的这种结构的一个或多个优点如下:
首先,由于在任何一个传递路径中仅存在一个光栅带,所以有可能使用多个阵列,每个光栅带在一个或多个阵列上建立独立的图案。因此,例如当使用两个光栅带和两个相应阵列时,与同样尺寸和旋转的单个阵列产生的图案相比可以包含两倍的细节。这使得使用条形码图案是可行的,通过消除混叠所造成的不确定,降低了机械复杂性和组装所需要的准确性。
其次,使用一个以上光栅带使光栅带能并排放置在例如径向或圆柱形结构中。因此,在组装光栅元件和扭杆之后,能在连续生产制造过程中顺序或同时制造两个带。这意味着由于不需要随后的组装和校准而可以进一步提高带的相对对准性。
第三,由于带可以并排放置,带和阵列之间的距离可以作得更小,使由于EMR从高、低透射率区域边界的衍射所造成的不可避免的准确性损耗达到最小。包含在现有技术中的发明必须有一个位于远离阵列至少为含槽的盘的厚度的带(在现有技术中称为槽或孔)。
第四,由于带和阵列之间的距离可以达到最小,散射效应可以降低到允许使用非平行EMR源的水平,无需对光学设备调焦。这显著降低了复杂性、组装对准需要和传感器的成本。
最后,光栅元件并排定位允许使用公知且准确的照相或喷镀金属工艺,例如在玻璃上包镀金属而没有损耗分辨率。由于EMR必须通过多个带,每个带都会附加地衰减或衍射,所以这些工艺与现有技术所述的重叠带(槽或孔)一起使用会导致更大的分辨率损耗或内反射、衍射或时间上劣化带来的其他问题。
本发明包括一种转矩传感器,包括至少被固定外壳部分包围的转轴,轴的旋转轴线相对于外壳固定,轴包括通过扭转适应耦合连接的基本刚性的第一和第二转矩输入部件,由此耦合能使第一转矩输入部件相对于第二转矩输入部件的角偏转作为轴转矩大小的函数,传感器还包括一个或多个电磁辐射(EMR)源和一个或多个EMR灵敏检测器阵列,第一光栅元件连接第一转矩输入部件,第二光栅元件连接第二转矩输入部件,每个第一和第二光栅元件包括光栅带,每个光栅带包括对EMR具有高、低透射率的交替区域,其特征在于,仅一个光栅元件的一个光栅带处于将EMR从任一源传递到任一阵列的传递路径中,由处于通向该阵列的一条或多条传递路径中的一个或多个光栅带的交替的高、低透射率区域造成一个或多个阵列中每个阵列上的入射EMR产生图案,一个或多个阵列上的这个图案或这些图案经处理器处理得到第一和第二转矩输入部件的相对角偏转,由此提供轴转矩大小的量度。
优选地,至少其中一个光栅元件还包括对EMR基本透明的媒质,将EMR从任一源传递到任一阵列的传递路径包括这样一条路径:从各个源开始,通过媒质的第一边界,光学传递通过媒质,然后通过媒质的第二边界退出并终止在相应阵列,光栅带与第一或第二边界中的任一个接合。
优选地,传感器包括两条传递路径,每条路径从分别的源开始,通过每个光栅带,终止在独立阵列。
或者,在某些应用中,传感器包括两组传递路径,每组包括两条或多条传递路径,所述路径从两个或多个分立的源开始,每组传递路径通过相应的光栅带,终止在独立阵列。
或者,在某些应用中,传感器包括两条传递路径,每条路径从共同的源开始,通过相应光栅带,终止在独立阵列。
或者,在某些应用中,传感器包括两条传递路径,每条路径从独立源开始,通过相应光栅带,终止在共同的阵列。
或者,在某些应用中,传感器包括两条传递路径,每条路径从共同的源开始,通过相应光栅带,终止在共同的阵列。
或者,在某些应用中,传感器包括两组传递路径,每组包括两条或多条传递路径,所述路径从两个或多个独立源开始,每组传递路径通过相应的光栅带,终止在共同的阵列。
优选地,第一边界相对于轴的旋转轴线基本径向布置,各个源发射的EMR基本以轴向、平行于轴的旋转轴线发射。
或者,第一边界为具有与轴的旋转轴线在同一直线上的中心轴的圆柱形,各个源发射的EMR基本以径向、垂直于轴的旋转轴线发射。
优选地,第二边界为具有与轴的旋转轴线在同一直线上的中心轴的圆柱形,各阵列邻近该边界定位。
或者,第二边界相对于轴的旋转轴线径向布置,各阵列邻近该边界定位。
优选地,这个图案或这些图案也经过处理器处理得出至少其中一个转矩输入部件的角速度。
优选地,这个图案或这些图案也经过处理器处理得出至少其中一个转矩输入部件的相对角位置。
优选地,至少一个光栅带包括高或低透射率的特征或附加区域,所得到的图案也经过处理得出连接相应光栅元件的转矩输入部件的绝对角位置。
在一个实施例中,至少一个光栅带布置成一连串条形码的形式,在相应阵列上得到的图案经过处理得出至少其中一个转矩输入部件的绝对角位置。
优选地,在相应阵列上得到的图案经过处理得出两个转矩输入部件的绝对角位置,并且对第一和第二转矩输入部件的绝对角位置之差进行处理以提供轴转矩大小的量度。
优选地,阵列包括一维或二维阵列,电荷耦合装置,大规模集成电路视觉芯片或横向效应光电二极管。
优选地,透明媒质包括聚合物或玻璃。
优选地,光栅带包括第一或第二边界上的金属镀层。
或者,光栅带包括通过对第一或第二边界进行光刻处理所沉积的涂层。
或者,光栅带包括媒质的物理或化学改变。
以下参考附图以举例的方式描述本发明,附图中:
图1使本发明第一实施例所述的转矩传感器横截面图,示出了轴组件,该组件包含通过扭杆连接起来的两个转矩输入部件、两个含光栅带的光栅元件和相关阵列及EMR源,其中第一和第二边界基本为具有与轴的旋转轴线在同一直线上的中心轴的圆柱形;
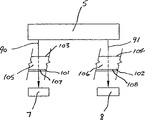
图2是图1所示的通过扭杆连接的两个转矩输入部件的详细图解视图,使出了EMR源、光栅带和相关阵列;
图3是图2的局部视图,示出了一个光栅元件以及边界、光栅带、EMR源和相关阵列的关系,
图4a、4b、4c、4d、4e和4f是可替换的传递路径的示意图,
图5是本发明第二实施例所述的转矩传感器的横截面图,示出了轴组件,该组件包含通过扭杆连接起来的两个转矩输入部件、两个含光栅带的光栅元件和相关阵列及EMR源,其中光栅元件的第一和第二边界相对于轴的旋转轴线基本径向布置;
图6是图5所示的通过扭杆连接的两个转矩输入部件的详细图解视图,使出了EMR源、光栅带和相关阵列,
图7是图6的局部视图,示出了一个光栅元件以及边界、光栅带、EMR源和相关阵列的关系,
图8是与图3相似的视图,示出了确定轴的角位置的“出发点标记”,
图9a示出了本发明第一实施例所述的第一和第二阵列上产生的典型图案,这些阵列是二维阵列,
图9b示出了本发明第一实施例所述的第一和第二阵列上产生的典型图案,这些阵列是一维阵列,
图10a示出了本发明第二实施例所述的第一和第二阵列上产生的典型图案,这些阵列是二维阵列,
图10b示出了本发明第二实施例所述的第一和第二阵列上产生的典型图案,这些阵列是一维阵列,
图11a-e示出了本发明第一实施例的另一个版本的光栅带连续相对位置,其中光栅带可替换成一连串允许测量转矩输入部件的绝对角位置的条形码子图案,以及
图12示出了图11a-e中所示的其中一个条形码上高、低透射率区域的细节,
图13与图3相似示出了一个光栅元件的一部分,其中光栅带由在光栅元件的第二边界上光刻或金属沉积产生,以及
图14与图3相似示出了一个光栅元件的一部分,其中光栅带由第二边界或媒质的物理或化学变化产生。
图1、2和3是根据本发明第一实施例所述的转矩传感器视图。图1和2分别为传感器的横截面图和透视图。图3是一个光栅元件的部分展开图,示出了光栅元件的结构。
基本为圆柱形的光栅元件3和4与转轴的转矩输入部件1 a和1b相接并且以扭杆2的形式通过扭转适应耦合连接在每个端部。光栅元件3和4设有与轴的旋转轴线1在同一直线上的中心轴,并分别包括光栅带101和102。转矩输入部件1a和1b以及扭杆2通过横销61和62连接。组件装入外壳10内并由轴承11和12支撑。电磁辐射(EMR)的传递路径90和91从每个EMR源5和6开始,依次通过相应的第一边界103和104、相应的媒质105和106、相应的第二边界107和108、相应的光栅带101和102,终止在相应的阵列7和8,光栅带101和102分别与第二边界107和108接合。在采用“光导”的方式下,由于内反射而使通过媒质的EMR能改变方向,“光导”方式通常用于沿特定路径引导EMR,例如在汽车内的发光仪表板中。在其他实施例(未示出)中,相应的光栅元件3和4的光栅带101和102中的其中一个光栅带或两个光栅带可以选择性地与相应的第一第二边界接合,因此,传递路径90和91中的第一边界103和104、第二边界107和108以及光栅带101和102的顺序可以与图1-3所描述的不同。但是,在所有实施例中,仅一个光栅元件的一个光栅带位于将EMR从相应源传递到相应阵列的每个相应传递路径中。EMR源5和6布置成相对于轴的旋转轴线1基本以径向提供EMR,照亮相应的传递路径90和91。EMR灵敏检测器的阵列7和8布置成相对于轴的旋转轴线1基本以径向从传递路径90和91接收EMR,这样通过处理器9处理在阵列7和8上产生的图案。当在转矩输入部件1a和1b之间施加转矩时,扭杆2有角度地偏转,导致一个图案相对于另一个图案位移。防障机构15通过限制转矩输入部件1a相对于转矩输入部件1b的角偏转量来限制扭杆2所能达到的最大转矩。这种防障机构在动力转向技术中是众所周知的,在此不作描述。在图象分析技术中,通过这种方法处理图象是众所周知的,所用的这些方法中有一些方法在IEEE计算机协会出版社ISBN0-8186-6492-4中Christof Koch和Hua Li的“视觉芯片:用模拟超大规模集成电路实现视觉算法”中进行了描述。可以用两个线性光检测器阵列来构建合适的阵列,例如德克萨斯仪器公司生产的设备TSL1410。
图4a、4b、4c、4d、4e和4f是传递路径另一方案的示意图。在所示的每种情况下,传递路径通过包含相应的第一边界103和104、相应的媒质105和106、相应的第二边界107和108以及相应的光栅带101和102的光栅元件。
图4a示出了包含两条传递路径90和91的传感器,在每条路径中,每条相应的路径从独立的EMR源5和6开始,分别依次通过相应的第一边界103和104、相应的媒质105和106、相应的第二边界107和108、相应的光栅带101和102,终止在相应的阵列7和8,光栅带101和102分别与第二边界107和108接合。
图4b示出了包含两组传递路径的传感器,每组分别包含两条传递路径90a和90b以及91a和91b,每条路径分别从独立的EMR源5a和5b、6a和6b开始,然后分别依次通过相应的第一边界103和104、相应的媒质105和106、相应的第二边界107和108、相应的光栅带101和102,终止在每组相应的单独阵列7和8,光栅带101和102分别与第二边界107和108接合。
图4c示出了包含两条传递路径90和91的传感器,每条相应的路径从共同的源5开始,然后分别依次通过相应的第一边界103和104、相应的媒质105和106、相应的第二边界107和108、相应的光栅带101和102,终止在相应独立的阵列7和8,光栅带101和102分别与第二边界107和108接合。
图4d示出了包含两条传递路径90和91的传感器,每条路径从各自独立的源5和6开始,然后分别依次通过相应的第一边界103和104、相应的媒质105和106、相应的第二边界107和108、相应的光栅带101和102,终止在共同的阵列7,光栅带101和102分别与第二边界107和108接合。
图4e示出了包含两条传递路径90和91的传感器,每条路径从共同的源5开始,然后分别依次通过相应的第一边界103和104、相应的媒质105和106、相应的第二边界107和108、相应的光栅带101和102,终止在共同的阵列7,光栅带101和102分别与第二边界107和108接合。
图4f示出了包含两组传递路径的传感器,每组分别包含两条传递路径90a和90b以及91a和91b,每条路径分别从独立的EMR源5a和5b、6a和6b开始,然后分别依次通过相应的第一边界103和104、相应的媒质105和106、相应的第二边界107和108、相应的光栅带101和102,终止在共同的阵列7,光栅带101和102分别与第二边界107和108接合。
图5、6和7是本发明第二实施例的转矩传感器图。图5和图6分别是传感器的横截面图和透视图。图7是一个光栅元件的部分展开图,示出了光栅元件的结构。
平面环形的光栅元件3和4接到轴的转矩输入部件1a和1b上,并以扭杆2的形式通过扭转适应耦合连接在每个端部。光栅元件3和4以与轴的旋转轴线1在同一直线上的中心轴径向布置并分别包括光栅带101和102。转矩输入部件1a和1b以及扭杆2通过横销61和62连接。组件装入外壳10内并由轴承11和12支撑。电磁辐射(EMR)的传递路径90和91从每个EMR源5和6开始,依次通过相应的第一边界103和104、相应的媒质105和106、相应的第二边界107和108、相应的光栅带101和102,终止在相应的阵列7和8,光栅带101和102分别与第二边界107和108接合。组件装入外壳10内并由轴承11和12支撑。电磁辐射(EMR)的传递路径90和91从每个EMR源5和6开始,依次通过相应的第一边界103和104、相应的媒质105和106、相应的第二边界107和108、相应的光栅带101和102,终止在相应的阵列7和8,光栅带101和102分别与第二边界107和108接合。在采用“光导”的方式下,由于内反射而使通过媒质的EMR能改变方向,“光导”方式通常用于沿特定路径引导EMR,例如在汽车内的发光仪表板中。在其他实施例(未示出)中,相应的光栅元件3和4的光栅带101和102中的其中一个光栅带或两个光栅带可以选择性地与相应的第一第二边界接合,因此,传递路径90和91中的第一边界103和104、第二边界107和108以及光栅带101和102的顺序可以与图5-7所描述的不同。但是,在所有实施例中,仅一个光栅元件的一个光栅带位于将EMR从相应源传递到相应阵列的每个相应传递路径中。EMR源5和6布置成以基本平行于轴的旋转轴线1的方向提供EMR,照亮相应的传递路径90和91.EMR灵敏检测器的阵列7和8布置成以基本平行于轴的旋转轴线1的方向从传递路径90和91接收EMR,这样通过处理器9处理在阵列7和8上产生的图案。当在转矩输入部件1a和1b之间施加转矩时,扭杆2有角度地偏转,导致一个图案相对于另一个图案位移。防障机构15通过限制转矩输入部件1a相对于转矩输入部件1b的角偏转量来限制扭杆2所能达到的最大转矩。这种防障机构在动力转向技术中是众所周知的,在此不作描述。在图象分析技术中,通过这种方法处理图象是众所周知的,所用的这些方法中有一些方法在IEEE计算机协会出版社ISBN0-8186-6492-4中Christof Koch和Hua Li的“视觉芯片:用模拟超大规模集成电路实现视觉算法”中进行了描述。可以用两个线性光检测器阵列来构建合适的阵列,例如德克萨斯仪器公司生产的器件TSL1410。
图8示出了本发明第一实施例的另一个版本(回过头参考图1、2和3),但应指出,这种相同的概念可以很容易地应用到说明书所公开的任何实施例中。光栅元件4包括由交替的高、低透射率区域组成的光栅带102,与图2和3所示那些相类似。除了这些区域以外,以便于存在于传递路径中的方式在预定角度的位置将至少一个附加的高或低透射率的“出发点标记”区域70加到该带上。阵列8从传递路径接收EMR,并由此通过处理器9处理阵列上产生的图案以提供转矩量度,插入的标记可以由处理器从该出发点标记位置开始计数,从而提供相关转矩输入部件的绝对角度位置量度。
图9a、b,10a、b,11a-e和12示出了根据本发明不同实施例的阵列上入射EMR所产生的典型图案。注意,在所有这些图中,黑底色的部分对应具有低(或基本没有)照度的图案部分,而没有底色的(即白色)部分对应图案的被高度照亮的部分。
图9a和9b示出了根据本发明第一实施例所述的阵列上入射EMR所产生的典型图案(如图1、2和3所示)。图9a中,阵列是二维阵列,例如包括德克萨斯仪器TC277黑&白CCD图象传感器,像素为699×288且有源窗口尺寸大约为8mm×6mm。在图象分析技术中,通过这种方法处理图象是众所周知的,所用的这些方法中有一些方法在IEEE计算机协会出版社ISBN0-8186-6492-4中Christof Koch和Hua Li的“视觉芯片:用模拟超大规模集成电路实现视觉算法”中进行了描述。为了改善边缘轮廓,在图9a中可见,阵列相对于图案成小角‘t’安装(通常小于15度)。由于图案不再“拍(beat)”合阵列的像素对准,这种错位产生更多与边缘位置有关的信息,因此回归技术因数据量的增加而更准确。尺寸‘x’,是阵列上图案边缘位置之间的平均相对位移,直接涉及两个光栅带的相对角位移以至轴转矩。图9b中,阵列是一维阵列,例如每个阵列包括德克萨斯仪器TSL1410黑&白线列芯片,具有128像素,有源窗口长度大约为8mm。同样对尺寸‘x’进行测量,但不具有上述二维阵列所提供的改善边缘轮廓的优点。
图10a示出了根据本发明第二实施例所述的单个阵列上入射EMR所产生的典型图案(图5-7所示)。阵列是如上所述的二维阵列。维数‘x’,是图案中两个边缘位置之间的相对位移,又直接涉及两个光栅带的相对角位移以至轴转矩。图10b示出了两个上述一维阵列情况下的图案。同样可以测量维数‘x’,适当的识别和处理方面也在国际专利申请PCT/GB95/02017中作了描述。
对于上述两个实施例来说,随着轴转动,图案移动跨过有限宽度的一维或二维阵列,与轴转矩完全无关。再者,利用图象识别领域中公知的技术,通过测量转矩输入部件的角速度和相对角位移可以计算出图案的迁移速度和图案的总位移。参考图8所描述的,可以用其中一个光栅带上的“出发点标记”作为绝对角位置参考。可以通过处理器从该出发点标记位置开始对插入标记计数,从而提供相关转矩输入部件的绝对角位置量度。
图11a-e示出了本发明第一实施例的另一个可替换方案的各光栅元件3和4的光栅带101和102的高、低透射率区域的细节(参考图1-3)。光栅带101和102布置成一连串120二进制条形码60a-g和61a-g的形式。这些120条形码以均匀的3度角间隔布置在每个圆柱形光栅元件的圆周周围。在这些图表中还示出了以虚线叠加的二维阵列20的视窗。
图12示出了光栅带101上条形码60a的细节,目的是更好地描述条形码格式。每个条形码共包括9个条:一个“开始”条62a,七个“角位置”条62b-h和一个“停止”条62i。在该实施例中,开始条62a和停止条62I总是低透射率区域,而插入的角位置条根据将被加密的角位置值的二进制值可以是高透射率区域或低透射率区域。例如,条形码60a包括条62c、62d和62f形式的高透射率区域和62b、62e、62g和62h形式的高透射率区域。条形码60a于是具有0110100的二进制值或52的角位置值(基数10)。用七个角位置条理论上能使加密高达128个分立的角位置值,这对于包含以及单独识别每个光栅带上的每个120条形码是必要的。
图11a示出了零转矩加到转矩输入部件1a和1b上时光栅带101和102的位置(回过头参考图1)。可以看到,分别对应光栅带101和102上52角位置值的条形码60a和61a在该零转矩条件下互相对准。所有其他的119个条形码对60b和61b、60c和61c等也如此。制造这种条形编码光栅带和在零转矩条件下使它们准确地互相对准的方法在名称为“光学转矩传感器的制造方法”的国际专利申请No.PCT/AU98/00857中有所描述。
图11b-e示出了相对于转矩输入部件1a在转矩输入部件1b上施加增加的逆时针转矩时光栅带101和102的连续相对角位移。二维阵列20的视窗用虚线叠加示出。注意,该视窗选择得充分大,以便总能从两个光栅带中的每一个光栅带捕获至少一个完整的条形码,与两个光栅带的相对角位移(作为输入转矩的函数)和在其360度可能范围内光栅带的绝对转角(作为转向角的函数)无关。为了减少总的硅用量(由此降低成本),可以使用两个分开的一维(即直线)阵列或较小的细长二维阵列63和64来代替较大的二维阵列20。在某种超大规模集成电路视觉芯片结构中,阵列20或阵列63和64可以嵌入、连接或集成作为用于执行必要处理的微处理器芯片即处理器9的一部分。
阵列20(或阵列63和64)从同时位于这个阵列(或这些阵列)视窗内的光栅带101和102的高透射率区域接收入射EMR。在图11b-d所示的例子中,阵列20(或阵列63和64)从条形码60c和61c接收入射EMR,因此处理器9能得出光栅元件3和4各自圆周上的光栅带101和102的相对位移距离‘d’,由此测量输入转矩。
但最重要的,在该实施例中,还对处理器9进行编程以对在任一时刻处于视窗内的所有完整条形码的角位置值进行解码,在该例中,条形码60c和61c都对应角位置值54。使用这种条形码有两个重要优点。
首先,对于光栅带101相对光栅带102的相对位移仍然较大来说,避免了混叠的问题。这在图11e中可以证明,在图11e中,光栅带101上的条形码60b(角位置值53)向右移位充分距离,使得它目前实际上位于光栅带102上的条形码61c和61d(分别为角位置值54和55)之间。但是通过识别出条形码60b的角位置值是53,因此其在零转矩条件下的相对位置邻近光栅带102上的条形码61b,正确的光栅带相对位移‘d’就能计算出来:
d=e+(54-53)*3*r*pi/180=e+3*r*pi/180(mm)
其中r是光栅元件的半径。在不用条形码的情况下,两个光栅带的相对位移非常小即条形码60b变成邻近条形码61c时会出现混叠。通过以连续二进制条形码的形式布置高、低透射率区域,可以在真正脱离零转矩条件下正确测量光栅元件3和4的相对角位移,而与高、低透射率区域的实际间隔无关。
其次,使用条形码能在360度的范围内测量两个转矩输入部件1a和1b中任何一个的绝对角位置,即从某个已知的绝对位置开始+/-180度。这可以在不需要在处理器9中执行任何计算过程的情况下实现(正如图8中所示的本发明前面的可替换版本的情况)。
如果以某种方式外部地限制光栅部件的最大相对角位移,例如通过使用前面所描述的防障机构,混叠也不会成为问题,在这种情况下,可以仅在两个光栅带的其中一个光栅带上采用连续条形码。这仍将提供足够信息,从而在上述+/-180度范围内提供绝对角位置量度。
应指出,条形码的使用同样可以应用到径向布置的传感器排列上,例如参考本发明第二实施例(图5、6和7)所描述的那样。
此外在本说明书中,“高透射率”和“低透射率”是关于所选的特殊EMR源和阵列广泛定义的。例如,如果使用对红光和白光源敏感的阵列,光栅带的高、低透射率区域就可由分别涂有(或通过其他方法上色)红、蓝传递涂层的区域组成。
图13示出了光栅元件4的一部分,示出了产生由高、低透射率区域组成的光栅带102的方法。利用光刻法将低透射率区域110应用到光栅元件4的媒质106的第二边界108。尚未被处理的剩下的区域109保持高透射率。合适的光刻处理的例子是5700系列光刻胶,由台湾高雄的Eternal化学有限公司制造。或者,用金属涂层工艺施加区域110,例如镀铝或气相淀积。
图14示出了光栅元件4的一部分,示出了产生由高、低透射率区域组成的光栅带102的另一种方法。通过物理或化学方法修改邻近媒质106的初始第二边界的区域110以改变区域110的透射率。立刻在低透射率区域110的下面建立媒质106的新的第二边界108,于是形成与该第二边界108接合的光栅带102。剩下的区域109未作修改,保持高透射率。合适的修改处理的一个例子是聚合物膜磨损以产生在逆光应用中使用的较高透射率区域。该技术的一个例子在欧洲专利申请No.0547343(Metzei)中作了描述。
可以理解,本领域的技术人员可以在不脱离本发明精神和范围的情况下对本发明作为各种修改和变形。
Claims (23)
1.一种转矩传感器,该传感器包括一个至少部分地被固定外壳部分包围的转轴,所述转轴的旋转轴线相对于所述外壳固定,该转轴包括通过扭转适应耦合连接的第一和第二转矩输入部件,所述扭转适应耦合使第一转矩输入部件相对于第二转矩输入部件有一个角度偏转,该角度偏转是轴转矩大小的函数,
所述传感器还包括:至少一个电磁辐射源和至少一个电磁辐射敏感的检测器阵列,连接到第一转矩输入部件的第一光栅元件,连接到第二转矩输入部件的第二光栅元件,
其中,第一和第二光栅元件中的每个光栅元件包括一个光栅带,每个光栅带包括交替的对电磁辐射具有高、低透射率的区域,
其中,仅一个光栅元件的一个光栅带处于将电磁辐射从任一电磁辐射源传递到任一检测器阵列的一个传递路径中,
由处于通向上述任一检测器阵列的至少一条传递路径中的光栅带的交替的高、低透射率区域造成的上述至少一个检测器阵列中的每个检测器阵列上的入射电磁辐射产生一个图案,在所述至少一个检测器阵列上的一个图案经一个处理器进行处理以得到第一和第二转矩输入部件的相对角度偏转,由此提供对所述转轴的转矩大小的量度。
2.根据权利要求1所述的转矩传感器,其中,至少其中一个光栅元件还包括对电磁辐射基本透明的媒质,所述将电磁辐射从任一源传递到任一阵列的传递路径包括这样一条路径:从各个源开始,通过媒质的第一边界,光学传递通过媒质,然后通过媒质的第二边界退出并终止在相应阵列,所述第一和第二光栅带中的光栅区域与第一或第二边界中的任一个接合。
3.根据权利要求1所述的转矩传感器,其中,所述传感器包括两条传递路径,每条路径从独立的源开始,通过每个光栅带,终止在独立的阵列。
4.根据权利要求1所述的转矩传感器,其中,所述传感器包括两组传递路径,每组传递路径包括至少两条传递路径,所述传递路径从至少两个独立源开始,每组传递路径通过相应的光栅带,终止在独立的阵列。
5.根据权利要求1所述的转矩传感器,其中,所述传感器包括两条传递路径,每条传递路径从共同的源开始,通过相应光栅带,终止在独立的阵列。
6.根据权利要求1所述的转矩传感器,其中,所述传感器包括两条传递路径,每条传递路径从分别的独立源开始,通过相应光栅带,终止在共同阵列。
7.根据权利要求1所述的转矩传感器,其中,所述传感器包括两条传递路径,每条传递路径从共同源开始,通过相应光栅带,终止在共同阵列。
8.根据权利要求1所述的转矩传感器,其中,所述传感器包括两组传递路径,每组传递路径包括至少两条传递路径,所述传递路径从至少两个独立源开始,每组传递路径分别通过第一和第二光栅元件中的光栅带,终止在共同阵列。
9.根据权利要求2所述的转矩传感器,其中,第一边界相对于轴的旋转轴线基本径向布置,各个源发射的电磁辐射以轴向、平行于轴的旋转轴线发射。
10.根据权利要求2所述的转矩传感器,其中,第一边界为具有与轴的旋转轴线在同一直线上的中心轴的圆柱形,各个源发射的电磁辐射以径向、垂直于轴的旋转轴线发射。
11.根据权利要求2所述的转矩传感器,其中,第二边界为具有与轴的旋转轴线在同一直线上的中心轴的圆柱形,各阵列邻近该第一边界定位。
12.根据权利要求2所述的转矩传感器,其中,第二边界相对于轴的旋转轴线径向布置,各阵列邻近该第二边界定位。
13.根据权利要求1所述的转矩传感器,其中,这个图案经过处理器处理得出至少其中一个转矩输入部件的角速度。
14.根据权利要求1所述的转矩传感器,其中,这个图案经过处理器处理得出至少其中一个转矩输入部件的相对角位置。
15.根据权利要求1所述的转矩传感器,其中,所述第一和第二光栅元件中的任一个光栅带包括高或低透射率的区域,这些区域所得到的图案也经过处理得出连接相应光栅元件的转矩输入部件的绝对角度位置。
16.根据权利要求1所述的转矩传感器,其中,所述第一和第二光栅元件中的任一个光栅带布置成一连串条形码的形式。
17.根据权利要求16所述的转矩传感器,其中,在相应阵列上得到的图案经过处理得出至少一个转矩输入部件的绝对角度位置。
18.根据权利要求16所述的转矩传感器,其中,在相应阵列上得到的图案经过处理得出两个转矩输入部件的绝对角位置,并且对第一和第二转矩输入部件的绝对角位置之差进行处理以提供轴转矩大小的量度。
19.根据权利要求1所述的转矩传感器,其中,所述阵列包括一维或二维阵列,电荷耦合装置,大规模集成电路视觉芯片或横向效应光电二极管。
20.根据权利要求2所述的转矩传感器,其中,所述透明媒质包括聚合物或玻璃。
21.根据权利要求2所述的转矩传感器,其中,所述光栅带包括第一或第二边界上的金属镀层。
22.根据权利要求2所述的转矩传感器,其中,所述光栅带包括通过对第一或第二边界进行光刻处理所沉积的涂层。
23.根据权利要求2所述的转矩传感器,其中,所述光栅带包括媒质的物理或化学改变。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| AUPP0984A AUPP098497A0 (en) | 1997-12-17 | 1997-12-17 | Transmission path torque transducer |
| AUPP0984 | 1997-12-17 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN1282420A CN1282420A (zh) | 2001-01-31 |
| CN1140779C true CN1140779C (zh) | 2004-03-03 |
Family
ID=3805266
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CNB988123614A Expired - Fee Related CN1140779C (zh) | 1997-12-17 | 1998-12-15 | 传递路径转矩传感器 |
Country Status (9)
| Country | Link |
|---|---|
| US (1) | US6389910B1 (zh) |
| EP (1) | EP1040332A4 (zh) |
| JP (1) | JP2002508510A (zh) |
| KR (1) | KR100543407B1 (zh) |
| CN (1) | CN1140779C (zh) |
| AU (1) | AUPP098497A0 (zh) |
| BR (1) | BR9812805A (zh) |
| CA (1) | CA2314180A1 (zh) |
| WO (1) | WO1999031474A1 (zh) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN110945332A (zh) * | 2017-07-27 | 2020-03-31 | 株式会社安川电机 | 扭矩传感器、致动器和机器人 |
Families Citing this family (25)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US6759648B2 (en) * | 1997-08-15 | 2004-07-06 | Bishop Innovation Limited | Sensor for sensing absolute angular position of a rotatable body |
| GB9919065D0 (en) * | 1999-08-12 | 1999-10-13 | Fast Technology Gmbh | Transducer Element |
| DE19962525B4 (de) * | 1999-12-23 | 2013-11-21 | Continental Automotive Gmbh | Optischer Drehmomentesensor |
| JP3546817B2 (ja) * | 2000-07-11 | 2004-07-28 | 日産自動車株式会社 | 電動機の磁極位置検出装置 |
| US6931311B2 (en) | 2001-02-07 | 2005-08-16 | Visteon Global Technologies, Inc. | Torque sensing for a steering system |
| JP2002257648A (ja) * | 2001-02-28 | 2002-09-11 | Honda Motor Co Ltd | トルク検出装置及びトルク検出装置を搭載した電動パワーステアリング装置 |
| KR100678619B1 (ko) * | 2002-04-13 | 2007-02-05 | 주식회사 만도 | 디지털 광학 앵글 센서 |
| KR20030084304A (ko) * | 2002-04-26 | 2003-11-01 | 주식회사 메카테크 | 전동조향시스템 조향토크 검출장치 |
| KR20030087257A (ko) * | 2002-05-08 | 2003-11-14 | 주식회사 만도 | 디지털 광학 앵글 센서 |
| CN100387955C (zh) * | 2005-06-07 | 2008-05-14 | 浙江工业大学 | 光栅转矩传感器 |
| EP2019302A1 (en) * | 2007-07-27 | 2009-01-28 | General Electric Company | Method and system for non-contact sensing of the torque of a shaft |
| US8352149B2 (en) * | 2008-10-02 | 2013-01-08 | Honeywell International Inc. | System and method for providing gas turbine engine output torque sensor validation and sensor backup using a speed sensor |
| DE102009047222A1 (de) * | 2009-11-27 | 2011-06-01 | Robert Bosch Gmbh | Sensoranordnung zum Ermitteln eines Drehmoments und zur Indexerkennung |
| US8171805B2 (en) * | 2010-02-18 | 2012-05-08 | Honeywell International Inc. | Non-contact torque determination system and method for a non-mechanically coupled rotating system |
| JP5883637B2 (ja) * | 2011-05-23 | 2016-03-15 | 株式会社ショーワ | 相対角度検出装置および電動パワーステアリング装置 |
| JP5843100B2 (ja) * | 2011-11-08 | 2016-01-13 | 株式会社ジェイテクト | トルク検出装置および電動パワーステアリング装置 |
| JP6723753B2 (ja) * | 2015-04-06 | 2020-07-15 | キヤノン株式会社 | 変位検出装置、トルク検出装置、ロボット装置、および変位検出方法 |
| WO2016163280A1 (en) * | 2015-04-06 | 2016-10-13 | Canon Kabushiki Kaisha | Displacement detecting apparatus, torque detecting apparatus, robot apparatus and displacement detecting method |
| DE102015209286A1 (de) | 2015-05-21 | 2016-11-24 | Schaeffler Technologies AG & Co. KG | Anordnung und Verfahren zum Messen einer Kraft oder eines Momentes mit mindestens zwei beabstandeten Magnetfeldsensoren |
| US9914477B2 (en) * | 2015-12-10 | 2018-03-13 | Ksr Ip Holdings Llc | Inductive steering torque and angle sensor |
| CA3026779A1 (en) * | 2016-06-08 | 2017-12-14 | Methode Electronic, Inc. | Torque sensor component pairing and assembly |
| JP6820102B2 (ja) * | 2017-08-14 | 2021-01-27 | アズビル株式会社 | トルク検出器及びトルク検出器の製造方法 |
| CN108871626B (zh) * | 2018-08-31 | 2020-03-31 | 东北电力大学 | 楔形维间解耦二维无线无源植入性传感器 |
| DE102020122331A1 (de) * | 2020-08-26 | 2022-03-03 | Thyssenkrupp Ag | Drehmomentsensoreinheit mit strukturierter Oberfläche der Lenkwellen |
| FR3130027B1 (fr) * | 2021-12-07 | 2024-03-08 | Safran Electronics & Defense | Dispositif et procédé de mesure du couple d’une chaîne de transmission |
Family Cites Families (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| GB417051A (en) * | 1933-03-21 | 1934-09-21 | Alan Stewart Fitzgerald | Improvements in or relating to dynamometric apparatus |
| DE2118722A1 (de) * | 1971-04-17 | 1972-11-02 | Hövel, Wolfhard, Dipl.-Ing. Dr., 1000 Berlin | Dynamischer Torsionsmesser |
| US4433585A (en) * | 1981-12-21 | 1984-02-28 | North American Philips Corporation | Device for measurement of the torsional angular deviation of a loaded rotating or static shaft |
| US4641027A (en) * | 1984-12-18 | 1987-02-03 | Battelle Memorial Institute | Indicating positions |
| ES8605898A1 (es) * | 1985-03-14 | 1986-03-16 | Bendiberica Sa | Perfeccionamientos en dispositivos captadores de par para mecanismo de accionamiento, especialmente de timoneria o ruedas orientables de un vehiculo |
| GB8613393D0 (en) * | 1986-06-03 | 1986-07-09 | Bicc Plc | Torque detection |
| EP0340172A1 (de) * | 1988-04-27 | 1989-11-02 | Elesta Ag Elektronik | Vorrichtung zum berührungslosen Messen des von einer Welle übertragenen Drehmoments |
| GB9202868D0 (en) * | 1992-02-12 | 1992-03-25 | Lucas Ind Plc | Optical torque sensors and steering systems for vehicles incorporating them |
| GB9400511D0 (en) * | 1994-01-12 | 1994-03-09 | Lucas Ind Plc | Optical torque sensors |
| JP3725545B2 (ja) * | 1994-08-25 | 2005-12-14 | ティー・アール・ダブリュー・ルーカス・ヴァリティ・エレクトリック・ステアリング・リミテッド | 変位センサおよびトルク・センサ |
-
1997
- 1997-12-17 AU AUPP0984A patent/AUPP098497A0/en not_active Abandoned
-
1998
- 1998-12-15 KR KR1020007006354A patent/KR100543407B1/ko not_active IP Right Cessation
- 1998-12-15 WO PCT/AU1998/001035 patent/WO1999031474A1/en not_active Application Discontinuation
- 1998-12-15 CA CA002314180A patent/CA2314180A1/en not_active Abandoned
- 1998-12-15 EP EP98960892A patent/EP1040332A4/en not_active Withdrawn
- 1998-12-15 JP JP2000539328A patent/JP2002508510A/ja not_active Abandoned
- 1998-12-15 CN CNB988123614A patent/CN1140779C/zh not_active Expired - Fee Related
- 1998-12-15 BR BR9812805-1A patent/BR9812805A/pt not_active IP Right Cessation
-
2000
- 2000-02-07 US US09/498,644 patent/US6389910B1/en not_active Expired - Fee Related
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN110945332A (zh) * | 2017-07-27 | 2020-03-31 | 株式会社安川电机 | 扭矩传感器、致动器和机器人 |
| CN110945332B (zh) * | 2017-07-27 | 2021-04-20 | 株式会社安川电机 | 扭矩传感器、致动器和机器人 |
Also Published As
| Publication number | Publication date |
|---|---|
| AUPP098497A0 (en) | 1998-01-15 |
| BR9812805A (pt) | 2000-10-10 |
| JP2002508510A (ja) | 2002-03-19 |
| EP1040332A4 (en) | 2007-01-31 |
| KR100543407B1 (ko) | 2006-01-20 |
| CA2314180A1 (en) | 1999-06-24 |
| CN1282420A (zh) | 2001-01-31 |
| EP1040332A1 (en) | 2000-10-04 |
| US6389910B1 (en) | 2002-05-21 |
| WO1999031474A1 (en) | 1999-06-24 |
| KR20010033002A (ko) | 2001-04-25 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN1140779C (zh) | 传递路径转矩传感器 | |
| CN1192225C (zh) | 转矩传感器 | |
| CN1175249C (zh) | 角度编码器 | |
| CN1232036C (zh) | 物体位置的光检测方法和设备 | |
| US7381942B2 (en) | Two-dimensional optical encoder with multiple code wheels | |
| CN102165285B (zh) | 多匝旋转编码器 | |
| US6800843B2 (en) | Displacement and torque sensor | |
| CN1134321C (zh) | 一种在扭矩传感器的光栅元件表面上制造光栅图形的方法 | |
| JPH10504651A (ja) | 変位センサおよびトルク・センサ | |
| CN104838255A (zh) | 碳纤维材料纤维方向的测量和对象碳纤维复合结构方式的制造 | |
| AU2002249382A1 (en) | Optical displacement sensor | |
| CN100578155C (zh) | 编码器以及编码器用受光装置 | |
| CN1971922B (zh) | 光电二极管阵列及光学编码器 | |
| EP2275782B1 (en) | High resolution absolute rotary encoder | |
| AU737562B2 (en) | Transmission path torque transducer | |
| CN106104213B (zh) | 编码器和带编码器的电机 | |
| MXPA00005696A (en) | Transmission path torque transducer | |
| CN106104214B (zh) | 编码器和带编码器的电机 | |
| AU8720698A (en) | Torque transducer | |
| MXPA00001584A (en) | Torque transducer | |
| JPWO2022180722A5 (zh) | ||
| MXPA00003735A (en) | Method for manufacture of optical torque transducers |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| C06 | Publication | ||
| PB01 | Publication | ||
| C10 | Entry into substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| C14 | Grant of patent or utility model | ||
| GR01 | Patent grant | ||
| C19 | Lapse of patent right due to non-payment of the annual fee | ||
| CF01 | Termination of patent right due to non-payment of annual fee |