CN113710172A - 腹腔镜外科手术器械 - Google Patents
腹腔镜外科手术器械 Download PDFInfo
- Publication number
- CN113710172A CN113710172A CN202080026627.8A CN202080026627A CN113710172A CN 113710172 A CN113710172 A CN 113710172A CN 202080026627 A CN202080026627 A CN 202080026627A CN 113710172 A CN113710172 A CN 113710172A
- Authority
- CN
- China
- Prior art keywords
- jaws
- gripping
- push rods
- articulated
- instrument
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
- 230000007246 mechanism Effects 0.000 claims description 11
- 238000001356 surgical procedure Methods 0.000 abstract description 4
- 238000004140 cleaning Methods 0.000 description 4
- 238000004519 manufacturing process Methods 0.000 description 3
- 238000010276 construction Methods 0.000 description 2
- 239000000463 material Substances 0.000 description 2
- 230000008878 coupling Effects 0.000 description 1
- 238000010168 coupling process Methods 0.000 description 1
- 238000005859 coupling reaction Methods 0.000 description 1
- 230000000249 desinfective effect Effects 0.000 description 1
- 239000012530 fluid Substances 0.000 description 1
- 238000000034 method Methods 0.000 description 1
- 229920003023 plastic Polymers 0.000 description 1
- 239000004033 plastic Substances 0.000 description 1
- 230000002035 prolonged effect Effects 0.000 description 1
- 238000007789 sealing Methods 0.000 description 1
Images








Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/28—Surgical forceps
- A61B17/29—Forceps for use in minimally invasive surgery
- A61B17/2909—Handles
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/28—Surgical forceps
- A61B17/29—Forceps for use in minimally invasive surgery
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B18/04—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by heating
- A61B18/12—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by heating by passing a current through the tissue to be heated, e.g. high-frequency current
- A61B18/14—Probes or electrodes therefor
- A61B18/1442—Probes having pivoting end effectors, e.g. forceps
- A61B18/1445—Probes having pivoting end effectors, e.g. forceps at the distal end of a shaft, e.g. forceps or scissors at the end of a rigid rod
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/28—Surgical forceps
- A61B17/29—Forceps for use in minimally invasive surgery
- A61B17/2909—Handles
- A61B2017/2912—Handles transmission of forces to actuating rod or piston
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/28—Surgical forceps
- A61B17/29—Forceps for use in minimally invasive surgery
- A61B2017/2926—Details of heads or jaws
- A61B2017/2927—Details of heads or jaws the angular position of the head being adjustable with respect to the shaft
- A61B2017/2929—Details of heads or jaws the angular position of the head being adjustable with respect to the shaft with a head rotatable about the longitudinal axis of the shaft
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/28—Surgical forceps
- A61B17/29—Forceps for use in minimally invasive surgery
- A61B2017/2926—Details of heads or jaws
- A61B2017/2932—Transmission of forces to jaw members
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/28—Surgical forceps
- A61B17/29—Forceps for use in minimally invasive surgery
- A61B2017/2926—Details of heads or jaws
- A61B2017/2932—Transmission of forces to jaw members
- A61B2017/2933—Transmission of forces to jaw members camming or guiding means
- A61B2017/2936—Pins in guiding slots
Abstract
本发明涉及一种腹腔镜外科手术器械,该腹腔镜外科手术器械设置有手动握持区域,该手动握持区域设置有三个握持元件,这三个握持元件中的一个握持元件是固定的(不可移动的)并且另外两个握持元件是可移动的并且铰接的,使得这两个握持元件各自可以执行角移动,从而便于在外科手术过程中使用该工具。
Description
发明目的
本申请的目的是提供一种腹腔镜外科手术器械。
更具体地,本发明提出一种腹腔镜外科手术器械的开发,该腹腔镜外科手术器械设置有手动握持部分,该手动握持部分设置有三个握持构件,这三个握持构件中的一个握持构件是固定的(不可移动的)并且其他两个握持构件是可移动的并且铰接的,使得这两个握持构件各自可以执行角运动,从而有助于在外科手术过程中使用该工具。
背景技术
目前,已知的腹腔镜外科手术设备用于需要通过形成于身体组织的切口缝合并结扎身体组织的手术。然而,在这些设备的绝大多数中,外科手术工具在单个平面中起作用,因此限制了自由度并且因此使得外科医生难以使用。
为了解决上述问题,已知一种腹腔镜器械,其在欧洲专利EP-A-1250891中描述。该器械突出之处在于包括一对接合机构,该对接合机构能够一方面将握持构件连接到钳口构件和第二握持构件,该第二握持构件连接到第二钳口构件。此外,由于两个接合构件的结构配置,两个握持构件能够相对于第二平面旋转。
然而,该器械相对复杂,并且其运动自由度仍然受到限制,因为它不允许接合钳口构件和握持构件的轴的360°旋转,使得该器械在手术期间可能难以使用。
为了解决上述所有问题,由同一持有者请求的专利公开第ES 2385518号中描述了一种已知的器械。尽管这种外科手术器械与现有技术装置相比使用起来更舒适,但实际上已经观察到,在外科手术期间涉及有待执行的复杂运动的延长时间的情况下,由于用手指的移动必须付出努力,使用者可能难以操作该外科手术器械。
还希望简化构造器械的组装,以便减少制造时间和成本。
此外,本申请人目前不知道具有在本说明书中描述的所有特征的发明。
发明内容
已经开发了本发明以便提供一种腹腔镜外科手术器械,该腹腔镜外科手术器械被配置成在应用领域内具有新颖性并且解决了上述缺点,进一步贡献了将从以下说明书中明显的其他附加优点。
因此,本发明的目的是提供一种腹腔镜外科手术器械,该腹腔镜外科手术器械包括:手动握持部分,该手动握持部分设置有两个握持构件,这两个握持构件是可移动的并且铰接的,使得每个握持构件都可以执行角移动,手动握持部分被配置成用于容纳使用者的手指;作业工具(30),该作业工具(30)设置有借助于枢转轴彼此铰接的两个钳口,作业工具能够借助于握持部分来处理;致动器机构,致动器机构能够将运动从握持部分传递至作业工具,其中,致动器机构包括两个推杆,其中,推杆中的每个推杆的远端以铰接方式耦接至相应的钳口,并且近端以可旋转的方式附接至能够纵向移动的相应的环形本体,使得推杆能够旋转,并且其中,每个握持构件借助于连杆耦接到对应的环形本体。
特别地,本发明的特征在于,握持部分包括第三固定握持构件,该第三固定握持构件被配置成容纳使用者的手指,该第三固定握持构件耦接到两个推杆被安装在其中的支撑部件中,并且该第三固定握持构件定位在两个铰接握持构件之间,这两个握持构件借助于轴铰接到第三握持构件。
本发明的另一个目的是提供一种全机械腹腔镜外科手术器械,该全机械腹腔镜外科手术器械可以在单次使用之后被处置或能够被消毒以便在不止一次的情况下再使用,由于作业工具在其使用期间可采用多个位置和/或取向,这对于内窥镜检查和腹腔镜检查过程可能是非常有用的。
由于这些特征,使用者(优选地外科医生)更容易处理该工具,从而改进人体工程学,在结构上易于制造。
优选地,可移动握持构件中的一个可移动握持构件由钩形本体限定,使得在使用器械期间便于手指的定位和/或移除。
附加地,该器械包括弧形轮廓延伸部,弧形轮廓延伸部延伸超出被提供用于放置使用者手指的区域。
根据本发明的另一个方面,它包括引导系统,该引导系统执行钳口中的每一个钳口的角运动,引导系统设置有凹槽,该凹槽的形状为存在于钳口中的每一个钳口的狭槽的形状,从推杆中的每一个推杆中突出的突出部在凹槽中是可滑动的。以此方式,允许更大的开口角度,该开口角度可以高达110°,并且在构造上比本领域已知的其他引导系统简单得多。
有利地,每个钳口包括止动器件,止动器件被设置成限制钳口的角运动。
在优选实施例中,止动器件由存在于钳口上的末端区域和存在于相面对的钳口上的笔直区域限定,末端区域具有彼此形成钝角的两个相邻笔直边缘(35、36),笔直区域设置成与笔直边缘中的一个笔直边缘邻接。
因此,所描述的腹腔镜外科手术器械代表了一种创新性结构,该创新性结构具有迄今为止出于其预期目的未知的结构特征和组成特征,原因连同其实际实用性一起为其提供了足够的基础来获得所要求的排他性的特权。
附图说明
本发明的腹腔镜外科手术器械对象的其他特征和优点将从优选但非排他性的实施例的描述中变得明显,该实施例在附图中以非限制性示例的方式展示,在附图中:
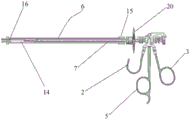
图1是根据本发明的腹腔镜外科手术器械的优选实施例处于静止位置的侧视图;
图2是图1中所示的外科手术器械的局部剖视平面图,其中为了清楚起见已经省略了一些部件;
图2a是致动器机构所位于的区域的放大详细视图;
图3是腹腔镜外科手术器械处于第二操作位置的局部侧视图;
图4是在先前图中所示的结合清洁系统的腹腔镜外科手术器械的侧视图;
图5是本发明的器械的握持部分的详细正视图,其中钳口处于闭合位置;
图6是握持部分的详细正视图,其中钳口处于打开位置;以及
图7是器械的握持部分的详细立体图,其中钳口处于打开位置。
具体实施方式
鉴于所提及的附图并且根据所使用的编号,附图示出了本发明的优选示例性实施例,该优选示例性实施例包括以下详细指示和描述的部件和构件。
因此,如在附图1至附图4中可以看到的,一种腹腔镜外科手术器械(总体上用附图标记(1)指示)包括设置有两个可移动握持构件(2、3)的握持部分、作业工具(30)以及致动器机构,该两个可移动握持构件借助于枢转轴(4)彼此铰接,该作业工具(30)设置有两个钳口(31、32),两个钳口(31、32)借助于枢转轴(35)彼此铰接,致动器机构能够将运动从握持部分传递至作业工具(30),所述致动器机构在下文更详细地描述。
此外,握持部分包括被配置为容纳使用者的手指的第三固定握持构件(5),第三固定握持构件(5)耦接到在其中安装了以下详述的两个推杆(6、7)的支撑部件(8),并且第三固定握持构件(5)定位在两个铰接式握持构件之间,两个握持构件借助于轴铰接到第三握持构件。
可移动握持构件(3)中的一个可移动握持构件和固定握持构件(5)展现出具有杆区段的细长形状,该杆区段以经由套管的区段结束,该套管具有非常类似于常规剪刀套管的形状,而其余的可移动握持构件(2)由钩形本体限定,使得其上部是开放的(根据图中所示的取向)。
固定握持构件(5)包括具有弧形轮廓(50)的延伸部,该弧形轮廓延伸部超过被提供用于放置使用者手指的区域。
现在特别参考能够将运动从握持部分传递至作业工具(30)的致动器机构,其中该致动器机构包括上述推杆(6、7)中的两个推杆,其中推杆中的每一个推杆的远端被铰接地耦接到相应的钳口,并且近端被可旋转地耦接到能够纵向移动的相应的环形本体,使得推杆(6、7)能够旋转,并且其中每个握持构件借助于连杆(11、12)耦接到对应的环形本体。
这两个环形本体(9,10)是以向前和向后的轴向移动(根据图1至图4的取向)可移动地布置的,其中,每个握持构件(2、3)借助于这组两个连杆(11、12)耦接至两个环形本体(9,10)。每个连杆(11、12)通过其端部之一耦接至存在于环形本体(9、10)的侧壁中的开口部分,使得它们能够使环形本体以及因此与对应的环形本体相关联的推杆旋转。图1a中用参考标记(90)指示作为窗口的开口部分,连杆(11)的端部可以滑动穿过该开口部分。
可手动致动的旋转轮(20)能够使推杆(5、6)旋转,当器械(1)处于使用位置时,旋转轮(20)位于握持构件(2、3、5)的前方。
致动器机构可以由由任何合适的材料(诸如塑料材料等)制成的壳体(为清楚起见未示出)保护。
此外,提供了引导系统来执行钳口(31、32)中的每一个钳口的角运动,该引导系统设置有凹槽(33),该凹槽(33)在其端部之一处以存在于钳口中的每一个钳口中的狭槽的形式开放,从另一个推杆突出的突出部(34)在凹槽中是可滑动的,如在图5至图7中可以更清楚地看到。
有利地,钳口(31、32)各自包括用于限制其角运动的止动器件。
这些止动器件是由存在于钳口中的末端区域和存在于相面对的钳口上的笔直区域限定的,该末端区域具有彼此形成钝角的两个相邻的笔直边缘(36、37),笔直区域旨在与笔直边缘中的一个笔直边缘邻接。
值得一提的是,器械包括位于两个推杆(6、7)的大部分周围并且沿着两个推杆(6、7)的大部分定位的管状盖。
在外科手术器械(1)的后部处,可以布置例如双极型的连接插座,该连接插座旨在连接至电流源,使得如果需要可以传输电压。
最后,如图4所示,为了清洁或消毒作业区域(30)以及两个推杆(6,7),该清洁系统(通常在任何类型的外科手术器械中执行)可以使用包括内部中空管状构件(14)的清洁系统,该内部中空管状构件(14)具有带有密封垫圈(15)的开口端,该密封垫圈适配于推杆(6、7)的外壁,而相对端具有入口插座(16),该入口插座(16)被设置成用于耦接至流体供应装备(未示出)。
在本发明的器械的制造中使用的细节、形状、尺寸和其他附件构件可方便地由不脱离由以下包括的权利要求限定的范围的其他附件构件代替。
Claims (6)
1.一种腹腔镜外科手术器械(1),包括:
手动握持部分,所述手动握持部分设置有两个握持构件,所述两个握持构件是可移动的和铰接的,使得每个握持构件能够执行角移动,所述手动握持部分被配置成用于容纳使用者的手指;
作业工具(30),所述作业工具(30)设置有两个钳口,所述两个钳口借助于枢转轴彼此铰接,所述作业工具能够借助于所述握持部分来处理,
致动器机构,所述致动器机构能够将运动从所述握持部分传递至所述作业工具(30),其中,所述致动器机构包括两个推杆,其中,所述推杆中的每个推杆的远端以铰接方式耦接至相应的钳口,并且近端以可旋转的方式接合至能够纵向移动的相应的环形本体,使得所述推杆能够旋转,并且其中每个握持构件借助于连杆耦接到对应的环形本体,
其特征在于,所述握持部分包括第三固定握持构件,所述第三固定握持构件被配置成容纳使用者的手指,所述第三固定握持构件耦接到所述两个推杆被安装在其中的支撑部件,并且所述第三固定握持构件定位在所述两个铰接式握持构件之间,所述两个握持构件借助于轴铰接到所述第三握持构件。
2.根据权利要求1所述的器械,其特征在于,所述可移动握持构件中的一个可移动握持构件由钩形本体限定。
3.根据前述权利要求中任一项所述的器械,其特征在于,所述固定握持构件包括具有弧形轮廓的延伸部,所述具有弧形轮廓的延伸部延伸超过设置用于放置使用者的手指的区域。
4.根据权利要求1所述的器械,其特征在于,所述器械包括引导系统,所述引导系统用于执行每个所述钳口的角运动,所述引导系统设置有凹槽,所述凹槽的形状为存在于每个所述钳口中的狭槽的形状,从每个所述推杆突出的突出部能够在所述凹槽中滑动。
5.根据前述权利要求中任一项所述的器械,其特征在于,所述钳口中的每一个钳口包括止动器件,以限制所述钳口的角运动。
6.根据权利要求5所述的器械,其特征在于,所述止动器件由存在于所述钳口中的末端区域和存在于相面对的钳口上的笔直区域限定,所述末端区域具有彼此形成钝角的两个相邻的笔直边缘,所述笔直区域设置成与所述笔直边缘中的一个笔直边缘邻接。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| ES201930528U ES1230155Y (es) | 2019-04-02 | 2019-04-02 | Instrumento quirúrgico laparoscópico |
| ESU201930528 | 2019-04-02 | ||
| PCT/ES2020/070185 WO2020201596A1 (es) | 2019-04-02 | 2020-03-17 | Instrumento quirúrgico laparoscópico |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| CN113710172A true CN113710172A (zh) | 2021-11-26 |
Family
ID=66615068
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN202080026627.8A Pending CN113710172A (zh) | 2019-04-02 | 2020-03-17 | 腹腔镜外科手术器械 |
Country Status (6)
| Country | Link |
|---|---|
| US (1) | US20220192691A1 (zh) |
| EP (1) | EP3949879B1 (zh) |
| JP (1) | JP2022529406A (zh) |
| CN (1) | CN113710172A (zh) |
| ES (1) | ES1230155Y (zh) |
| WO (1) | WO2020201596A1 (zh) |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| ES1230155Y (es) * | 2019-04-02 | 2019-08-19 | Servocad Microtronics S L | Instrumento quirúrgico laparoscópico |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5147373A (en) * | 1991-04-29 | 1992-09-15 | Ferzli George S | Laparoscopic instrument |
| US6159162A (en) * | 1998-05-04 | 2000-12-12 | Lsvp International, Inc. | Biopsy apparatus |
| US6358268B1 (en) * | 2000-03-06 | 2002-03-19 | Robert B. Hunt | Surgical instrument |
| US20150112382A1 (en) * | 2012-04-23 | 2015-04-23 | Servocad Microtronics, S.L. | Laparoscopic surgical instrument |
| US20160100851A1 (en) * | 2014-10-10 | 2016-04-14 | Scholten Surgical Instruments Inc | Push-to-close actuated dual action spaced pivot assembly for surgical instrument jaws, blades, and forceps |
Family Cites Families (26)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5383888A (en) * | 1992-02-12 | 1995-01-24 | United States Surgical Corporation | Articulating endoscopic surgical apparatus |
| US5281220A (en) * | 1992-01-13 | 1994-01-25 | Blake Joseph W Iii | Endoscopic instrument |
| US5261917A (en) * | 1992-02-19 | 1993-11-16 | Hasson Harrith M | Suture tying forceps with a plurality of suture holders and method of tying a suture |
| US5281235A (en) * | 1992-02-21 | 1994-01-25 | Habley Medical Technology Corporation | Needle manipulator |
| US5752973A (en) * | 1994-10-18 | 1998-05-19 | Archimedes Surgical, Inc. | Endoscopic surgical gripping instrument with universal joint jaw coupler |
| US6159224A (en) * | 1996-11-27 | 2000-12-12 | Yoon; Inbae | Multiple needle suturing instrument and method |
| NL1007751C2 (nl) * | 1997-12-09 | 1999-06-22 | Surgical Innovations Vof | Chirurgische inrichting. |
| DE19833600A1 (de) * | 1998-07-25 | 2000-03-02 | Storz Karl Gmbh & Co Kg | Medizinische Zange mit zwei unabhängig voneinander beweglichen Maulteilen |
| DE19926555A1 (de) * | 1999-06-11 | 2000-12-28 | Storz Karl Gmbh & Co Kg | Medizinisches Greifinstrument sowie Verfahren zur Verwendung dieses Greifinstruments |
| US7090689B2 (en) | 2001-04-18 | 2006-08-15 | Olympus Corporation | Surgical instrument |
| US7758608B2 (en) * | 2002-07-25 | 2010-07-20 | Dicesare Paul | Enhanced dexterity surgical hand piece |
| JP2005066180A (ja) * | 2003-08-27 | 2005-03-17 | Olympus Corp | 医療用器具 |
| US20050075664A1 (en) * | 2003-10-03 | 2005-04-07 | Olympus Corporation | Surgical instrument |
| DE102006028001B4 (de) * | 2006-06-14 | 2009-11-26 | Paul Peschke Gmbh | Chirurgische Greifzange |
| US8652120B2 (en) * | 2007-01-10 | 2014-02-18 | Ethicon Endo-Surgery, Inc. | Surgical instrument with wireless communication between control unit and sensor transponders |
| ES2333509B2 (es) * | 2009-10-07 | 2011-01-03 | Universidad De Cantabria | Instrumento para cirugia endoscopica. |
| US10172669B2 (en) * | 2009-10-09 | 2019-01-08 | Ethicon Llc | Surgical instrument comprising an energy trigger lockout |
| JP5940864B2 (ja) * | 2012-04-12 | 2016-06-29 | カール シュトルツ ゲゼルシャフト ミット ベシュレンクテル ハフツング ウント コンパニー コマンディートゲゼルシャフト | 医療用マニピュレータ |
| ES1077793Y (es) * | 2012-09-19 | 2013-01-10 | Servocad Microtronics S L | Herramienta mecanica |
| US8764769B1 (en) * | 2013-03-12 | 2014-07-01 | Levita Magnetics International Corp. | Grasper with magnetically-controlled positioning |
| US10398459B2 (en) * | 2015-04-02 | 2019-09-03 | Aod Holdings Llc | Combination device for endoscopic and arthroscopic surgical procedures |
| US10987120B2 (en) * | 2017-01-10 | 2021-04-27 | New Wave Endo-Surgery Inc. | Multifunction surgical instrument for use in laparoscopic surgery |
| US11950871B2 (en) * | 2018-01-16 | 2024-04-09 | Multi Scopic Instruments, Llc | End effector |
| US11696761B2 (en) * | 2019-03-25 | 2023-07-11 | Cilag Gmbh International | Firing drive arrangements for surgical systems |
| ES1230155Y (es) * | 2019-04-02 | 2019-08-19 | Servocad Microtronics S L | Instrumento quirúrgico laparoscópico |
| US11737844B2 (en) * | 2020-08-19 | 2023-08-29 | Covidien Lp | End effector assembly for use in a robotic surgical instrument |
-
2019
- 2019-04-02 ES ES201930528U patent/ES1230155Y/es active Active
-
2020
- 2020-03-17 CN CN202080026627.8A patent/CN113710172A/zh active Pending
- 2020-03-17 JP JP2021553774A patent/JP2022529406A/ja active Pending
- 2020-03-17 WO PCT/ES2020/070185 patent/WO2020201596A1/es active Search and Examination
- 2020-03-17 US US17/600,602 patent/US20220192691A1/en active Pending
- 2020-03-17 EP EP20783074.6A patent/EP3949879B1/en active Active
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5147373A (en) * | 1991-04-29 | 1992-09-15 | Ferzli George S | Laparoscopic instrument |
| US6159162A (en) * | 1998-05-04 | 2000-12-12 | Lsvp International, Inc. | Biopsy apparatus |
| US6358268B1 (en) * | 2000-03-06 | 2002-03-19 | Robert B. Hunt | Surgical instrument |
| US20150112382A1 (en) * | 2012-04-23 | 2015-04-23 | Servocad Microtronics, S.L. | Laparoscopic surgical instrument |
| US20160100851A1 (en) * | 2014-10-10 | 2016-04-14 | Scholten Surgical Instruments Inc | Push-to-close actuated dual action spaced pivot assembly for surgical instrument jaws, blades, and forceps |
Also Published As
| Publication number | Publication date |
|---|---|
| WO2020201596A1 (es) | 2020-10-08 |
| ES1230155Y (es) | 2019-08-19 |
| US20220192691A1 (en) | 2022-06-23 |
| JP2022529406A (ja) | 2022-06-22 |
| EP3949879C0 (en) | 2023-12-27 |
| EP3949879A4 (en) | 2022-12-14 |
| EP3949879A1 (en) | 2022-02-09 |
| ES1230155U (es) | 2019-05-28 |
| EP3949879B1 (en) | 2023-12-27 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US6077290A (en) | Endoscopic instrument with removable front end | |
| US11337588B2 (en) | Endoscope | |
| US10624531B2 (en) | Endoscope | |
| US10624617B2 (en) | Endoscope | |
| US6605105B1 (en) | Instrument or forceps for medical and particularly endoscopic applications | |
| EP1958572B1 (en) | Mid-point lock suture cutter | |
| US5556416A (en) | Endoscopic instrument | |
| US9707003B2 (en) | Articulating surgical instrument | |
| TW319686B (zh) | ||
| CA2680258C (en) | Improved end effector mechanism for a surgical instrument | |
| US8882800B2 (en) | Medical instrument | |
| JP2004154164A (ja) | 多自由度型処置具 | |
| GB2421912A (en) | Laparoscopic forceps | |
| EP2842503B1 (en) | Laparoscopic surgical instrument | |
| US20220142698A1 (en) | Electrosurgical instrument | |
| CN113710172A (zh) | 腹腔镜外科手术器械 | |
| CN214712692U (zh) | 手术抓钳 | |
| NO322694B1 (no) | Apparat, saerlig til bruk ved laparoskopisk kirurgisk inngrep | |
| US7488296B1 (en) | Multifunctional actuator rod and handle for pushing a driver cable of a biopsy grasping instrument | |
| EP2532308B1 (en) | Medical instrument | |
| US20140121692A1 (en) | Actuation grip for a microsurgical instrument, and microsurgical instrument | |
| US20200297370A1 (en) | Shaft for an endoscopic instrument, endoscopic instrument and endoscopic system | |
| CN112568944A (zh) | 用于执行微创过程的医疗器械 | |
| Hallbeck et al. | Laparoscopic Devices and Methods of Using | |
| WO2016162883A1 (en) | Surgical instrument with multiple degrees of freedom |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination |