CN113607094B - 一种接触网斜率激光测量装置和方法 - Google Patents
一种接触网斜率激光测量装置和方法 Download PDFInfo
- Publication number
- CN113607094B CN113607094B CN202111180260.8A CN202111180260A CN113607094B CN 113607094 B CN113607094 B CN 113607094B CN 202111180260 A CN202111180260 A CN 202111180260A CN 113607094 B CN113607094 B CN 113607094B
- Authority
- CN
- China
- Prior art keywords
- laser
- slope
- contact net
- alpha
- range finder
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images






Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01B—MEASURING LENGTH, THICKNESS OR SIMILAR LINEAR DIMENSIONS; MEASURING ANGLES; MEASURING AREAS; MEASURING IRREGULARITIES OF SURFACES OR CONTOURS
- G01B11/00—Measuring arrangements characterised by the use of optical techniques
- G01B11/26—Measuring arrangements characterised by the use of optical techniques for measuring angles or tapers; for testing the alignment of axes
Abstract
本发明公开了一种接触网斜率激光测量装置和方法,通过系统整合接触网、光电处理、视频传输、陀螺仪等技术,采用激光测距的原理,以非接触的方式测量目标获取自动计算的斜率值。该装置本体集成了激光测距仪、编码器、数显屏幕、精密物理水泡、指示绿色激光、物理调整传动装置、电子倾角仪、蓝牙模块。采用本发明装置可有效解决现有施工中斜率数据的采集效率低、测量精度差、受环境制约严重等问题。以提高施工效率以及后续工程的安装精度,从而减少返工现象。对后期设备的使用和维护提供了便利。
Description
技术领域
本发明涉及激光测量技术领域,尤其涉及一种接触网斜率激光测量装置和方法。
背景技术
目前接触网斜率测量大部分使用自制的物理线坠测量法或者经纬仪进行测量。物理线坠测量精度较低,受环境影响较大,在北部强风区域测量尤其不准。经纬仪测量效率缓慢,且需要多人配合进行数据采集。在施工工期紧张的环境下,会大大制约施工效率。
未来铁路发展的高标准环境下,以往的测量方法会越来越不利于施工单位的竞争环境。因此研究开发一种新型接触网斜率激光测量设备,将有效提高施工效率,提高施工标准,降低调整量,增强企业竞争力。
发明内容
本发明为了解决上述提到的问题,提供了一种接触网斜率激光测量装置和方法。
本发明解决其技术问题所采用的技术方案是:构造一种接触网斜率激光测量装置,包括:壳体,及设置于壳体内的控制电路板;
其中,壳体设置为立方体结构,一侧边向外凸出设置第一支撑体和第二支撑体,第一支撑体外侧设置α旋钮编码器,第二支撑体的外侧与α旋钮编码器对称设置β旋钮编码器,α旋钮编码器的传动轴穿过第一支撑体,至第一支撑体和第二支撑体之间形成的间隙,并与α激光测距仪连接,β旋钮编码器的传动轴穿过第二支撑体,至第一支撑体和第二支撑体之间形成的间隙,并与β激光测距仪连接;
α旋钮编码器、β旋钮编码器、α激光测距仪及β激光测距仪均连接至控制电路板进行信号传输;控制电路板接收α旋钮编码器和β旋钮编码器的旋转角度,接收α激光测距仪和β激光测距仪的激光测距结果,计算得到接触网斜率。
其中,壳体上设置用于安装显示屏的窗口;安装于显示屏窗口内的显示屏连接控制电路板,以显示控制电路板接收到的数据,同时显示计算结果。
其中,壳体上设置用于安装物理调平水泡的窗口;安装于物理调平水泡窗口内的物理调平水泡与α旋钮编码器的传动轴连接以进行调平。
其中,控制电路板上集成设置α旋钮编码器、β旋钮编码器、α激光测距仪及β激光测距仪的控制电路,均连接至计算编码器。
其中,控制电路板上还设置了蓝牙芯片,以将数据通过蓝牙传输的方式发送至连接的移动设备。
本发明解决其技术问题所采用的技术方案是:构造一种接触网斜率激光测量方法,基于如前述技术方案所述的接触网斜率激光测量装置进行测量,包括:
将接触网斜率激光测量装置放置于正对待测接触网吊柱的位置,判断实时的接触网斜率激光测量装置所处状态;
当接触网斜率激光测量装置处于水平状态,且正对吊柱斜面时,通过α旋钮编码器和β旋钮编码器对应调整α激光测距仪和β激光测距仪,使α激光测距仪和β激光测距仪向吊柱投射两束激光,测量接触网斜率激光测量装置与吊柱上两个激光投射点之间的距离,及吊柱上两个激光投射点与接触网斜率激光测量装置连线和水平面形成的两个转角,进而计算两个激光投射点连线和水平面的夹角,即求得接触网吊柱的斜率;
当接触网斜率激光测量装置处于水平状态,无法正对吊柱斜面时,通过α旋钮编码器和β旋钮编码器对应调整α激光测距仪和β激光测距仪,使α激光测距仪和β激光测距仪向吊柱投射三束激光,即其中一个激光测距仪先后向吊柱投射两条激光射线;三束激光在吊柱上投射得到三个不同的点,三点形成斜率测面;斜率测面与水平面夹角即为吊柱斜率;
当接触网斜率激光测量装置无法处于水平状态时,通过设置于接触网斜率激光测量装置确定当前所在平面与绝对水平面之间的夹角,转换至接触网斜率激光测量装置处于水平的状态,确定斜率测面与绝对水平面之间的夹角即为吊柱斜率。
区别于现有技术,本发明的接触网斜率激光测量装置和方法,采用了激光测距的原理,通过系统整合接触网、光电处理、视频传输、陀螺仪等技术,以非接触的方式测量目标获取自动计算的斜率值。该装置可有效解决现有施工中斜率数据的采集效率低、测量精度差、受环境制约严重等问题。以提高施工效率以及后续工程的安装精度,从而减少返工现象。
附图说明
下面将结合附图及实施例对本发明作进一步说明,附图中:
图1是本发明提供的一种接触网斜率激光测量装置的结构示意图。
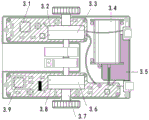
图2是本发明提供的一种接触网斜率激光测量装置的俯视结构示意图。
图3是本发明提供的一种接触网斜率激光测量装置的控制电路板的连接结构示意图。
图4是本发明提供的一种接触网斜率激光测量方法中测量设置示意图。
图5是本发明提供的一种接触网斜率激光测量方法中状态一对应的处理示意图。
图6是本发明提供的一种接触网斜率激光测量方法中状态二对应的处理示意图。
图7是本发明提供的一种接触网斜率激光测量方法中状态三对应的处理示意图。
具体实施方式
为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明做进一步的详细说明。应当理解,此外所描述的具体实施例仅用以解释本发明,但并不用于限定本发明。基于本发明中的实施例,本领域普通人员在没有做出创造性劳动前提下所获得的所有其他实施例,都将属于本发明保护的范围。
参照附图1和图2,本发明提供的一种接触网斜率激光测量装置,包括:壳体1,及设置于壳体1内的控制电路板;
其中,壳体1设置为立方体结构,一侧边向外凸出设置第一支撑体3和第二支撑体4,第一支撑体3外侧设置α旋钮编码器1.1,第二支撑体4的外侧与α旋钮编码器1.1对称设置β旋钮编码器1.7,α旋钮编码器1.1的传动轴穿过第一支撑体3,至第一支撑体3和第二支撑体4之间形成的间隙,并与α激光测距仪1.5连接,β旋钮编码器1.7的传动轴穿过第二支撑体4,至第一支撑体3和第二支撑体4之间形成的间隙,并与β激光测距仪1.6连接;
α旋钮编码器1.1、β旋钮编码器1.7、α激光测距仪1.5及β激光测距仪1.6均连接至控制电路板进行信号传输;控制电路板接收α旋钮编码器1.1和β旋钮编码器1.7的旋转角度,接收α激光测距仪1.5和β激光测距仪1.6的激光测距结果,计算得到接触网斜率。
其中,壳体1上设置用于安装显示屏1.4的窗口;安装于显示屏1窗口内的显示屏1.4连接控制电路板,以显示控制电路板接收到的数据,同时显示计算结果。
图2为本发明提供的结构俯视图,壳体1上设置用于安装物理调平水泡1.2的窗口;安装于物理调平水泡窗口内的物理调平水泡1.2与α旋钮编码器1.1的传动轴连接以进行调平。图中1.8和1.9均为绿色指示激光,其中1.8对应β激光测距仪1.6,1.9对应α激光测距仪1.5。图2中,1.3表示设备的数据通讯线路插口,优选设置为type-c接口;5为装置的电源开关,6为按键开关。
其中,控制电路板上集成设置α旋钮编码器1.1、β旋钮编码器1.7、α激光测距仪1.5及β激光测距仪1.6的控制电路,均连接至控制电路板上的计算编码器。
其中,控制电路板上还设置了蓝牙芯片,以将数据通过蓝牙传输的方式发送至连接的移动设备。
控制电路板的组成如图3所示,图中3.1为蓝牙模块,3.2为β旋钮编码器对应的控制芯片,3.3为对应β激光测距仪的绿色指示激光,3.4为电子倾角仪,3.5为电路板供电的锂电池组,3.6为对应α激光测距仪的绿色指示激光,3.7为传动轴,3.8为α旋钮编码器,3.9为计算编码器cpu。
同时,配合α激光测距仪1.5及β激光测距仪1.6还分别设置了指示方向的绿色指示激光,以指示α激光测距仪1.5及β激光测距仪1.6射出的激光光线的方向;图1所示1.8和1.9分别对应α激光测距仪1.5和β激光测距仪1.6对应的绿色指示激光。
α激光测距仪1.5和β激光测距仪1.6并排放置于中间,间距12mm固定于设备正面70mm位置。两个激光测距仪可以单独使用测量距离,通过物理调整传动装置进行手动调节,激光可调角度为132°(-30°至 102°)。测距仪测量精度为±(2mm + d*5万分之五,d表示实际距离)。测距仪检测距离为0.05m—30m。
本发明的激光测量装置与之前的接触网斜率测量相比,之前是通过接触式进行获取的,这在施工中带来了许多局限性。例如在高铁线路要验证吊柱斜率时,需要在吊柱下搭好梯车,高空人员爬上去对吊柱斜率进行测量。这不仅降低了施工效率,也给铁路安全埋下隐患。本发明装置可在地面对高空吊柱等设备进行无接触式的数据采集,大大提高了施工效率和施工安全质量。
由于测量原理不同,本发明装置具有更高的精准性。该装置利用激光测距原理可以对接触网支柱底部至顶部进行数据采集,计算出支柱的整体斜率,而传统测量方法、测量工具只能对支柱局部进行测量,无法算出整个支柱的斜率。尤其是支柱加上负载后自身带有曲度时,斜率偏差较大。
本发明可在各种恶劣施工环境下工作。例如大风区段、崎岖的路基段、雨水天气。传统的测量工具在大风地区是无法进行精准采集工作的。装置操作简单,体积小巧便于携带。对设备的使用和维护提供了便利。该装置集成蓝牙功能,可利用手机端对数据进行采集整理。不局限于传统的笔录。在现代化办公的当下环境更利于数据的后端使用。
本发明解决其技术问题所采用的技术方案是:构造一种接触网斜率激光测量方法,基于如前述技术方案所述的接触网斜率激光测量装置进行测量,测量时,工作人员只需要将仪器上的指示激光对准需要测量的柱子,如图4所示接触网斜率激光测量装置测量模拟图。调节到需要测量的角度,保证激光测距仪能测量到柱子的距离,不需要调平仪器,一键即可测量得到数据,测量时间由测距仪测量时间决定(正常测距仪响应时间小于2s,可能因为环境光,被测物体表面问题影响测量时间和成功率),计算时间基本可以忽略不计。具体步骤包括:
将接触网斜率激光测量装置放置于正对待测接触网吊柱的位置,判断实时的接触网斜率激光测量装置所处状态;
当接触网斜率激光测量装置处于水平状态,且正对吊柱斜面时,通过α旋钮编码器和β旋钮编码器对应调整α激光测距仪和β激光测距仪,使α激光测距仪和β激光测距仪向吊柱投射两束激光,测量接触网斜率激光测量装置与吊柱上两个激光投射点之间的距离,及吊柱上两个激光投射点与接触网斜率激光测量装置连线和水平面形成的两个转角,进而计算两个激光投射点连线和水平面的夹角,即求得接触网吊柱的斜率。
如图5所示,前述技术方案中的装置放置在A位置,内部倾角仪可以测出当前装置所处平面与水平面的相对角度;通过激光测距装置从A点对吊柱投射两束激光AB和AC,可测出AB和AC的距离以及相对于水平面的转角a1、a2。根据勾股定理可推理出BC相对于水平面的夹角x。即为吊柱的斜率。
当接触网斜率激光测量装置处于水平状态,无法正对吊柱斜面时,通过α旋钮编码器和β旋钮编码器对应调整α激光测距仪和β激光测距仪,使α激光测距仪和β激光测距仪向吊柱投射三束激光,即其中一个激光测距仪先后向吊柱投射两条激光射线;三束激光在吊柱上投射得到三个不同的点,三点形成斜率测面;斜率测面与水平面夹角即为吊柱斜率。
如图6所示,在图5所示的前一状态基础上,通过α激光测距仪和β激光测距仪中的一者从A点对吊柱投射第三点D,这样不在同一条直线上的三个点BCD构成一斜面即为所测面。然后推算出斜面与水平面的两面夹角b即为吊柱斜率。以下为研究任意点投射至吊柱三点,求斜面斜率的模型。
具体的,通过三点坐标,求斜面法向量,再由斜面和水平面法向量求得夹角,计算过程如下:
已求得三点坐标:
B(x1,y1,z1)=(0,sin a1*AB,0)
C(x2,y2,z2)=(cos a1*AB-cos a2*AC,sin a2*AC,0)
D(x3,y3,z3)=((cos a1*AB/cos a2-cos d*AD)cos a2,
cos a1*AB/cos a2*sin a2-(cos a1*AB/cos a2-cos d*AD)sin a2,
sin d*AD)
斜面的法向量:n=BD*BC=(i,j,k)
[i , j , k ]
= [x2-x1,y2-y1,z2-z1]
[x3-x1,y3-y1,z3-z1]
由向量叉乘公式:(a1,a2,a3)*(b1,b2,b3)=(a2*b3-a3*b2,a3*b1-a1*b3,a1*b2-a2*b1)
得斜面法向量:n=[(y2-y1)*(z3-z1)-(z2-z1)*(y3-y1),
(z2-z1)*(x3-x1)-(x2-x1)*(z3-z1),
(x2-x1)*(y3-y1) -(y2-y1)*(x3-x1),]
若两法向量为n1=(A1,B1,C1),n2=(A2,B2,C2)
得两面夹角r:cos r=In1*n2I/In1I*In2I (I表示绝对值)
cos r=IA1*A2+B1*B2+C1*C2I/[(A1^2+B1^2+C1^2)^0.5*(A2^2+B2^2+C2^2)^0.5]
当n2为水平面时,n2=(0,B2,0)
cos r=I0+B1*B2+0I/[(A1^2+B1^2+C1^2)^0.5*(B2^2)^0.5]
=IB1I/(A1^2+B1^2+C1^2)^0.5
由此可求斜面与水平面夹角:
Cos x=IjI/(i^2+j^2+k^2)^0.5
=I(z2-z1)*(x3-x1)-(x2-x1)*(z3-z1)I/{[(y2-y1)*(z3-z1)-(z2-z1)*(y3-y1)]^2+[(z2-z1)*(x3-x1)-(x2-x1)*(z3-z1)]^2+[(x2-x1)*(y3-y1) -(y2-y1)*(x3-x1)]^2}^0.5
再把B,C,D点坐标带入求的夹角x值:
x=acos(Ix2*z3I/{[(y2-y1)*z3]^2+[x2*z3]^2+[x2*(y3-y1) -(y2-y1)*x3]^2}^0.5)
=acos(I(cos a1*AB-cos a2*AC)*(sin d*AD)I/{[(sin a2*AC-sin a1*AB)*(sind*AD)]^2+[(cos a1*AB-cos a2*AC)*(sin d*AD)]^2+[(cos a1*AB-cos a2*AC)*(cos a1*AB/cos a2*sin a2-(cos a1*AB/cos a2-cos d*AD)sin a2-sin a1*AB) -(sin a2*AC-sina1*AB)*((cos a1*AB/cos a2-cos d*AD)cos a2)]^2}^0.5)
当接触网斜率激光测量装置无法处于水平状态时,通过设置于接触网斜率激光测量装置确定当前所在平面与绝对水平面之间的夹角,转换至接触网斜率激光测量装置处于水平的状态,确定斜率测面与绝对水平面之间的夹角即为吊柱斜率。
如图7所示,任意点在不水平的状态下也能对吊柱斜面进行斜率测量。这样可以大大提高施工效率,简化测量操作。为了实现这一目的我们需要研究三面角的转换方法,即在第二种状态下加入第三个面,绝对水平面。状态二中的水平面为测量设备自身水平面,当测量设备没有进行调平操作时,则会与绝对水平面成一定夹角c。
在测量设备中集成双轴倾角仪,可以获取三轴倾角数据,通过编程可以获取设备与绝对水平面的夹角c值。然后根据状态二的算法可以得出斜面与设备面的夹角b值。再编程转换即可得到斜面与绝对水平面的夹角值x,即为吊柱的斜率。以下为研究三个面,已知面一和面二夹角b,面二和面三夹角c,求面三和面一夹角的模型。
利用矩阵坐标系转换方法,可以将状态二中三点的设备坐标转换成大地坐标的值,即可推导出斜面与绝对水平面的夹角。
上面结合附图对本发明的实施例进行了描述,但是本发明并不局限于上述的具体实施方式,上述的具体实施方式仅仅是示意性的,而不是限制性的,本领域的普通技术人员在本发明的启示下,在不脱离本发明宗旨和权利要求所保护的范围情况下,还可做出很多形式,这些均属于本发明的保护之内。
Claims (6)
1.一种接触网斜率激光测量装置,其特征在于,包括:
壳体,及设置于壳体内的控制电路板;所述控制电路板包括倾角仪;
其中,壳体设置为立方体结构,一侧边向外突出设置第一支撑体和第二支撑体,第一支撑体外侧设置α旋钮编码器,第二支撑体的外侧与α旋钮编码器对称设置β旋钮编码器,α旋钮编码器的传动轴穿过第一支撑体,至第一支撑体和第二支撑体之间形成的间隙,并与α激光测距仪连接,β旋钮编码器的传动轴穿过第二支撑体,至第一支撑体和第二支撑体之间形成的间隙,并与β激光测距仪连接;
α旋钮编码器、β旋钮编码器、α激光测距仪及β激光测距仪均连接至控制电路板进行信号传输;控制电路板接收α旋钮编码器和β旋钮编码器的旋转角度,接收α激光测距仪和β激光测距仪的激光测距结果,计算得到接触网斜率。
2.根据权利要求1所述的接触网斜率激光测量装置,其特征在于,壳体上设置用于安装显示屏的窗口;安装于显示屏窗口内的显示屏连接控制电路板,以显示控制电路板接收到的数据,同时显示计算结果。
3.根据权利要求1所述的接触网斜率激光测量装置,其特征在于,壳体上设置用于安装物理调平水泡的窗口;安装于物理调平水泡窗口内的物理调平水泡与α旋钮编码器的传动轴连接以进行调平。
4.根据权利要求1所述的接触网斜率激光测量装置,其特征在于,所述控制电路板上集成设置α旋钮编码器、β旋钮编码器、α激光测距仪及β激光测距仪的控制电路,均连接至计算编码器。
5.根据权利要求4所述的接触网斜率激光测量装置,其特征在于,控制电路板上还设置了蓝牙芯片,以将数据通过蓝牙传输的方式发送至连接的移动设备。
6.一种接触网斜率激光测量方法,基于如权利要求1-5任一所述的接触网斜率激光测量装置进行测量,其特征在于,包括:
将接触网斜率激光测量装置放置于正对待测接触网吊柱的位置,判断实时的接触网斜率激光测量装置所处状态;
当接触网斜率激光测量装置处于水平状态,且正对吊柱斜面时,通过α旋钮编码器和β旋钮编码器对应调整α激光测距仪和β激光测距仪,使α激光测距仪和β激光测距仪向吊柱投射两束激光,测量接触网斜率激光测量装置与吊柱上两个激光投射点之间的距离,及吊柱上两个激光投射点与接触网斜率激光测量装置连线和水平面形成的两个转角,进而计算两个激光投射点连线和水平面的夹角,即求得接触网吊柱的斜率;
当接触网斜率激光测量装置处于水平状态,无法正对吊柱斜面时,通过α旋钮编码器和β旋钮编码器对应调整α激光测距仪和β激光测距仪,使α激光测距仪和β激光测距仪向吊柱投射三束激光,即其中一个激光测距仪先后向吊住投射两条激光射线;三束激光在吊柱上投射得到三个不同的点,三点形成斜率测面;斜率测面与水平面夹角即为吊柱斜率;
当接触网斜率激光测量装置无法处于水平状态时,通过设置于接触网斜率激光测量装置内部的倾角仪确定当前所在平面与绝对水平面之间的夹角,转换至接触网斜率激光测量装置处于水平的状态,确定斜率测面与绝对水平面之间的夹角即为吊柱斜率。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202111180260.8A CN113607094B (zh) | 2021-10-11 | 2021-10-11 | 一种接触网斜率激光测量装置和方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202111180260.8A CN113607094B (zh) | 2021-10-11 | 2021-10-11 | 一种接触网斜率激光测量装置和方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN113607094A CN113607094A (zh) | 2021-11-05 |
| CN113607094B true CN113607094B (zh) | 2022-01-25 |
Family
ID=78310926
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN202111180260.8A Active CN113607094B (zh) | 2021-10-11 | 2021-10-11 | 一种接触网斜率激光测量装置和方法 |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN113607094B (zh) |
Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN108844475A (zh) * | 2018-08-22 | 2018-11-20 | 深圳维德城市轨道交通科技有限公司 | 一种接触网检测设备 |
| CN113063361A (zh) * | 2021-03-29 | 2021-07-02 | 长安大学 | 一种对称式轨道接触网检测装置及检测方法 |
Family Cites Families (19)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5022751A (en) * | 1989-08-21 | 1991-06-11 | Sundstrand Data Control, Inc. | Portable localizer siting system |
| US5291271A (en) * | 1992-08-19 | 1994-03-01 | Owens-Brockway Glass Container Inc. | Measurement of transparent container wall thickness |
| US6459483B1 (en) * | 1998-02-10 | 2002-10-01 | Toolz, Ltd. | Level with angle and distance measurement apparatus |
| JP4304270B2 (ja) * | 2003-08-22 | 2009-07-29 | 極東産機株式会社 | 壁面寸法測定方法 |
| CN100544997C (zh) * | 2007-08-20 | 2009-09-30 | 济南蓝动激光技术有限公司 | 全数字化电气化铁路激光接触网参数检测仪 |
| CN201800566U (zh) * | 2010-08-31 | 2011-04-20 | 成都国铁精工科技有限责任公司 | 手持式激光接触网参数智能检测仪 |
| CN202582532U (zh) * | 2012-03-27 | 2012-12-05 | 长沙拓虎信息科技有限公司 | 全自动激光接触网检测仪 |
| JP2015524053A (ja) * | 2012-05-16 | 2015-08-20 | ファロ テクノロジーズ インコーポレーテッド | レーザトラッカのベアリング振れを補正する装置および方法 |
| CN203241029U (zh) * | 2013-04-23 | 2013-10-16 | 上海大学 | 智能室内三维测量仪 |
| CN104457570B (zh) * | 2014-11-28 | 2017-11-14 | 北京中远通科技有限公司 | 一种铸坯位置测量方法 |
| CN107560578B (zh) * | 2017-10-09 | 2024-01-30 | 西安明松电子科技有限公司 | 一种非接触式激光铁路接触网检测装置及方法 |
| CN108106562B (zh) * | 2017-12-05 | 2021-02-09 | 浙江维思无线网络技术有限公司 | 一种接触网测量方法及装置 |
| CN108594247A (zh) * | 2018-03-05 | 2018-09-28 | 湖北三江航天红峰控制有限公司 | 一种基于双激光扫描的铁路接触网测量方法和装置 |
| CN108761477B (zh) * | 2018-07-27 | 2023-12-19 | 成都磁海电气工程有限公司 | 一种采用数字激光技术的非接触式接触网参数采集装置、测量系统及其测量方法 |
| CN110174057A (zh) * | 2018-09-25 | 2019-08-27 | 中铁电气化局集团有限公司 | 一种激光图像法接触网测量仪 |
| CN211668449U (zh) * | 2019-11-28 | 2020-10-13 | 北京金自天正智能控制股份有限公司 | 一种钢轨高精度廓形检测装置 |
| CN111189392A (zh) * | 2020-01-21 | 2020-05-22 | 中建安装集团有限公司 | 盾构隧道接触网锚螺栓孔定位装置及其应用 |
| CN211452219U (zh) * | 2020-01-21 | 2020-09-08 | 中建安装集团有限公司 | 盾构隧道接触网锚螺栓孔定位装置 |
| CN112066948B (zh) * | 2020-09-10 | 2022-05-31 | 济南蓝动激光技术有限公司 | 吊柱安装位置及固定底板倾斜角度自动测量装置和方法 |
-
2021
- 2021-10-11 CN CN202111180260.8A patent/CN113607094B/zh active Active
Patent Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN108844475A (zh) * | 2018-08-22 | 2018-11-20 | 深圳维德城市轨道交通科技有限公司 | 一种接触网检测设备 |
| CN113063361A (zh) * | 2021-03-29 | 2021-07-02 | 长安大学 | 一种对称式轨道接触网检测装置及检测方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| CN113607094A (zh) | 2021-11-05 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN107449393B (zh) | 一种城市轨道交通隧道变形监测系统及方法 | |
| CN109373980B (zh) | 一种基于视频监控测量仪和测斜终端的监测方法及系统 | |
| CN209545885U (zh) | 倾斜角度监测装置和系统 | |
| CN103499341B (zh) | 一种电杆倾斜测量仪的使用方法 | |
| CN109743707A (zh) | 倾斜角度监测装置和系统 | |
| CN113984026A (zh) | 一种基于三维激光测绘技术的全站扫描一体仪与测量方法 | |
| CN111694001A (zh) | 一种用于无人机的实时测距定位系统 | |
| CN107991691B (zh) | 一种卫星导航定位精度检定设备及方法 | |
| CN201535671U (zh) | 数字式高差测量仪 | |
| CN204831274U (zh) | 一种便携式水平高差测量架及测量装置 | |
| CN206959776U (zh) | 基于北斗卫星的高层建筑安全监测系统 | |
| CN209857884U (zh) | 一种基于视频监控测量仪和测斜终端的监测系统 | |
| CN113607094B (zh) | 一种接触网斜率激光测量装置和方法 | |
| CN212082366U (zh) | 一种多功能量尺 | |
| CN109708624A (zh) | 一种建构筑物密集区测设控制网的方法 | |
| CN106996773A (zh) | 一种直线定位装置及方法 | |
| CN111426304A (zh) | 基于视觉、卫星定位和gis算法的精确姿态定位方法 | |
| CN208398856U (zh) | 全站型三维高速激光扫描多点自动测量装置 | |
| CN104121897B (zh) | 卫星定位测量杆 | |
| CN216081957U (zh) | 一种桥梁挠度测量装置 | |
| CN214470600U (zh) | 一种基于gnss的空间坐标测量装置 | |
| CN108519051A (zh) | 一种箱梁测量方法及装置 | |
| CN113834468A (zh) | 一种基于实时定位技术的观光车辆行驶路线坡度测量仪 | |
| CN208140322U (zh) | 一种桥梁振幅实时监测仪 | |
| CN112730889A (zh) | 一种新型风向测定系统 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| GR01 | Patent grant | ||
| GR01 | Patent grant |